信号与系统-6_gl
上海泰坛自动化技术 X300 X310 电梯控制系统 调试说明

X300/X310电梯控制系统调试说明上海泰坛自动化技术有限公司1注意事项注意!在使用X310系统前,请务必详细阅读TITANX 为您提供的相关资料!注意!X310电源为DC24V ,所有的输入端低电平有效。
继电器触点输出时,触点容量为5A ,250VAC/5A ,30VDC 。
前言本资料对或X310电梯串行通讯系统专用控制器及其辅件的电梯安装、使用、维护进行了全面系统的阐述。
本手册可作为采用X310电梯专用控制器进行系统设计的参考资料,也可作为系统安装、调试、维护的使用资料本资料目的,主要讲述了X310电梯控制系统的安装、调试过程中涉及到的技术问题;详述了X310电梯控制系统的调试过程、调试方法以及故障排除;针对广大电梯设计人员,电梯现场配线人员;同时还为电梯维护人员提供相应的技术资料。
本资料面对对象a. 用户b. 电梯控制系统设计者c. 现场配线调试者d. 公司技术支持人员2目录第一章端口简介1.1系统配备1.2控制通讯单元接口1.2.1输入采集口1.2.2输出部分1.2.3通讯口1.2.4其他注意事项1.3轿厢通讯单元(C16)接口1.4外呼通讯显示单元接口1.5轿厢显示通讯单元接口第二章检修运行2.1检查现场2.2确认图纸,核实以下部分2.3检查各个接口回路电阻值2.4检查接地问题2.5上电前动作2.6电压测量2.7制柜内接触器、继电器吸合情况2.8查阅参数中//状态查询/输入信号对话框中的内容2.9门机设定2.9.1设定门机的数目,默认为单门功能,并所有楼层开门2.9.2门机的工作过程2.10变频器接口及设定2.10.1 X310与变频器接口有以下三种方式2.10.2段速组合方式2.11检修慢车运行2.12编码器反馈以及配线2.12.1以下是安川变频器(616G5/676GL5-JJ/676G7)以及富士变频器(G11UD)的旋转编码器接口具体接法2.12.2旋转编码器方向与电机方向以及变频器运行方向的判断2.12.3电梯控制器脉冲信号采集2.13电机参数自整定第三章井道自学习3.1层档板的安装及设定3.2通讯线的处理3.3楼层数的设定3.4强减位置的调整3.5限位位置的调整3.6极限位置的调整3.7自学习启动条件3.8故障及其排除方法第四章高速调试4.1进行高速运行前,请检查以下条件4.2单层运行4.3双层运行4.4多层运行4.5全程运行端口简介14.6减速距离的调整4.7平层精度的调整4.8平衡系数4.9舒适感以及抖动的排除4.9.1起动的调整4.9.2电梯运行时的垂直振动4.9.3电梯高速时有波浪漂移感觉4.10强迫减速距离测试第五章 功能调试5.1基本功能描述5.1.1检修5.1.2司机5.1.3直驶5.1.4贵宾5.1.5上电自动开门5.1.6自动关门5.1.7关门延长功能5.1.8本层呼梯开门5.1.9安全触板/光幕5.1.10满载保护功能5.1.11超载保护功能5.1.12电源管理5.1.13自动反基站5.1.14自动再平层功能5.1.15消防功能5.1.16电梯消防员专用电梯功能5.1.17单/双门选择5.1.18开关门受阻5.1.19门锁粘连功能5.1.20防捣乱功能5.1.21输出接触器监控5.1.22抱闸反馈监控5.1.23脉冲监测5.1.24轿厢卡死监测5.1.25门区信号监测5.1.26变频器监测5.1.27集成音乐到站钟5.1.28井道参数自学习5.1.29手动呼梯功能5.1.30就近停靠5.1.31按钮嵌入处理5.1.32反悔功能5.1.33基站定位功能5.1.34锁梯辅助功能5.1.35并联功能5.1.36不停层可设定5.1.37故障记录5.1.38楼层显示灵活设定5.1.39门锁抖动消除5.1.40急救功能5.1.41自动记录运行次数5.1.42丰富的帮助信息5.1.43故障自动发送(选配功能)5.2部分功能的测试5.2.1光幕屏蔽功能5.2.2开关门功能调试5.2.3光幕功能测试5.2.4关门力矩测定5.2.5超满载功能测定5.2.6本层开门功能5.2.7司机功能5.2.8再平层功能5.2.9其他功能测试第六章故障提示及排除6.1电梯井道数据自学习过程中的故障6.1.1无脉冲6.1.2无门区6.2在X310主界面中提示电梯的故障类型6.2.1输出粘连6.2.2抱闸粘连6.2.3门锁粘连6.2.4断门锁6.2.5超载6.2.6限位故障6.2.7断急停6.2.8变频器故障6.3门机在开关门过程中出现的故障以及排除方法6.3.1不开门6.3.2不关门6.3.3运行中不响应外呼6.4电梯运行过程中出现的可能情况6.4.1运行中给出V2速度6.4.2无V2(减速爬行给定)速度6.4.3运行中紧急停梯第七章调试工作结束第八章参数汇表8.1主控板参数一览表8.2安川(YASKAWA)616G5参数表8.3安川676GL5-JJ部分参数的设定8.4安川G7分参数的设定8.5 QMA变频器参数设定8.6富士变频器FRENIC5000G11UD参数一览表2第一章端口简介1.1系统配备系统包括主控通讯单元(X310)、轿厢通讯单元系列(C)、轿内显示单元(D系列)以及外召通讯单元(H系列)。
MATLAB在《信号与系统》教学中的应用
根 本 就 无 法 满 足 促 进 理 论 教 学 的要 求 , 后 是 学 生 课 后 的练 习 方 式 单 一 , 停 留在 数 学 的 繁 杂 计 算 上 , 乏 灵 活 、 态 地 对 计 最 仅 缺 动 算 结 果 进 行 分 析 , 大 地 降低 了学 生 对 课 程 基 础 理 论 的深 入 理 解 和 实 际 应 用 能 力 的 培 养 。 大 由于 传 统 教 学模 式 的 不 足 , 接 造 成 了理 论 教 学 课 时 不够 , 践 教 学 环 节 薄 弱 , 生 学 习 负 担 加 重 。 直 实 学
中图 分 类 号 : P 9 T 31
文献标识码 : A
文章 编 号 : 0 9 3 4 (0 8 1 — 1 2 — 4 1 0 — 0 4 2 0 )6 2 3 5 0
Ap l a i n fM ATLAB i h e c i g o i n la d S s e p i t so c o n t e T a h n S g a n y t m f
2传 统教 学 中存 在 的不 足
《 号 与 系统 》 一 门 理 论 性很 强 的 专 业 基 础 课 , 及 到 大 量 的基 本 概 念 和 基 本 理 论 , 仅 是 先 学课 程 《 路 分 析 》 延 续 , 且 信 是 涉 不 电 的 而
是 后 续 许 多 电子 电气 类 专 业 课 ( 《 字 信 号 处 理 》 《 信 原 理 》 ) 基 础 。然 而 , 传 统 的黑 板 板 书 教 学 方 法 中 ( 如 数 、通 等 的 在 即便 有些 使 用 了 多媒 体 教学 方式 ) 由于 需 要 大 量 的数 学 知 识 和 电路 分 析 知 识 为 基 础 , 课 堂 理 论 教 学 过 于 抽 象 、 燥 , 式 推 导 繁 杂 , 学 模 式 死 , 其 枯 公 教 板 , 成 学 生 的学 习兴 趣 下 降 , 采 用 实 验 箱 展 开 的实 验 教 学 环 节 严 重 脱 离理 论 教 学 , 现 为 实 验 的
gps简介
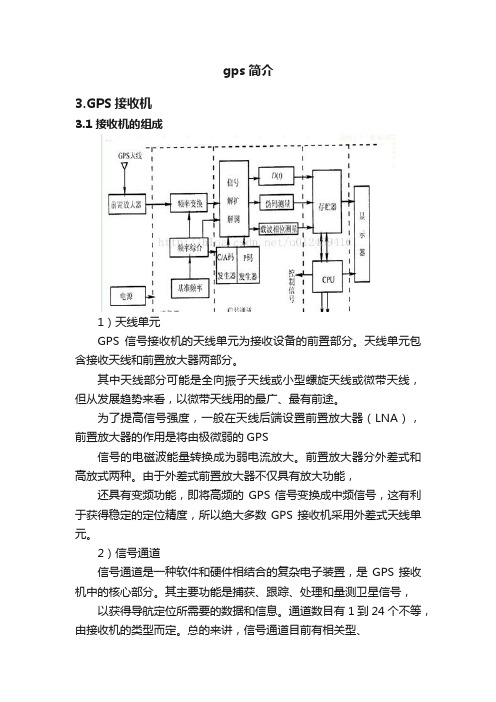
gps简介3.GPS接收机3.1 接收机的组成1)天线单元GPS信号接收机的天线单元为接收设备的前置部分。
天线单元包含接收天线和前置放大器两部分。
其中天线部分可能是全向振子天线或小型螺旋天线或微带天线,但从发展趋势来看,以微带天线用的最广、最有前途。
为了提高信号强度,一般在天线后端设置前置放大器(LNA),前置放大器的作用是将由极微弱的GPS信号的电磁波能量转换成为弱电流放大。
前置放大器分外差式和高放式两种。
由于外差式前置放大器不仅具有放大功能,还具有变频功能,即将高频的GPS信号变换成中频信号,这有利于获得稳定的定位精度,所以绝大多数GPS接收机采用外差式天线单元。
2)信号通道信号通道是一种软件和硬件相结合的复杂电子装置,是GPS接收机中的核心部分。
其主要功能是捕获、跟踪、处理和量测卫星信号,以获得导航定位所需要的数据和信息。
通道数目有1到24个不等,由接收机的类型而定。
总的来讲,信号通道目前有相关型、平方型和相位型等三种。
新一代GPS信号接收机广泛采用相关型通道,主要由信号捕获电路、伪噪声跟踪环路和载波跟踪环路组成。
3)存储器这是GPS信号中接收机将定位现场采集的伪距、载波相位测量、人工量测的数据及解译的卫星星历储存起来的一种装置,以供差分导航和作相对定位的测后数据。
4)微处理机接收机的计算部分由微处理机和机内软件组成。
机内软件是由接收机生产厂家提供的,是实现数据采集、通道自校自动化的重要组成部分,主要用于信号捕获、跟踪和定位计算。
微处理机结合机内软件作下列计算和处理:(1)开机后指令各通道自检,并测定、校正和存储各通道的时延值;(2)解译卫星星历,计算测站的三维坐标;(3)由测站定位坐标和卫星星历计算所有卫星的升降时间、方位和高度角,提供可视卫星数据及卫星的工作状况,以便获得最佳定位星位,提高定位精度。
3.2 GPS天线使能上一节提到GPS天线的前置放大器,也叫LNA,如果GPS功能已经打开,但是搜星效果较差,可以检查GPS的天线使能脚是否拉高(因为发射功率的问题,GPS天线对GPS搜星效果影响很大)。
反式-2-己烯醛在植物防御反应中的作用

植物学报 C A7/>7e s e 8tv//ef//? of Bofany 2021, 56 (2): 232-240, doi: 10.11983/CBB20131•专题论坛•反式_2•己烯醛在植物防御反应中的作用王姝瑶+,郝鑫+,曲悦,陈迎迎,沈应柏**北京林业大学,北京100083摘要反式-2-己烯醛是绿色植物释放的一种小分子挥发性物质,在调节植物生长发育和抵抗各种环境胁迫中发挥重要作 用。
已有研究表明,反式-2-己烯醛可抑制植物根系生长,具有较高的抑菌和抗虫活性,也可以作为植物间的“信使”来传 递防御信号。
该文系统综述了反式-2-己烯醛的生物合成、代谢途径及其在生物胁迫防御反应中的重要作用,提出了研宄中 存在的问题及未来的研究方向和建议,以期为深入揭示反式-2-己烯醛的作用机理提供参考。
关键词绿叶挥发物,植物防御反应,反式-2-己烯醛王姝瑶,郝鑫,曲悦,陈迎迎,沈应柏(2021).反式-2-己烯醛在植物防御反应中的作用.植物学报56, 232-240.在复杂多变的生态环境中,植物进化出一系列防 御反应机制。
防御反应指植物对昆虫和病原菌侵袭表 现出的一系列特异性内部代谢变化和外部结构改变 以提高自身生存能力的应变过程,包括外界刺激识 别、刺激信号转导、防御基因表达调控、生物活性物 的合成积累和防御效应实现等生物过程(张庆花等, 2019)。
植物防御反应由复杂的信号调节网络组成,包括生长素(indole-3-acetic a cid,IA A)、茉莉酸 (jasmonic acid,JA)、水杨酸(salicylic acid,SA)和绿 叶挥发物(green leaf volatiles,GLVs)等防御信号系 统。
其中,绿叶挥发物是植物在遭受昆虫取食、病原 菌侵染以及机械损伤等生物和非生物胁迫时释放出 的一种六碳小分子挥发物,包含醛类、醇类和酯类化 合物。
健康植物释放的GLVs很少,当受到侵害时,立 即合成并大量释放GLVs。
飞机导航系统(机电)机电设备维修 电子设备维修 电子设备舱 机务专用 教育

2、雷达系统
• 包括LRRA(无线电高度表):测高 • DME(测距机):测距 • WXR(气象雷达):飞机周围环境 监测
3、交通管制与警告系统
• 包括 ATC(空中交通管制):空中交通管 制应答机和地面交通管制台 • TCAS(交通警告与防撞系统) • GPWS(近地警告系统)
• IRS(惯性基准系统):提供飞机姿态、 航向、飞机当前位置等信息
二、ILS的系统组成
• ILS系统包括三个分系统:
– 提供横向引导的航向信标(localizer)系统 – 提供垂直引导的下滑信标(glidealope)系统 – 提供距离的指点信标(marker beacon)
航向和下滑信标产生的引导信号
1、航向信标(航向台)
• 航向信标工作频率为108.10—111.95 MHz, 共有40个波道。
• 发射机发射信号通过方向性天线阵沿跑 道中心线两侧发射两束水平交叉的辐射 波瓣,左波瓣90Hz调制,右波瓣被 150Hz调制。交汇处位于跑道水平中心 线上。
2、下滑信标(下滑台)
• 工作频率329.15-335MHZ ,间隔 150KHZ。共有40个频道。 • 两个波瓣信号。上波瓣90Hz调制,右波 瓣被150Hz调制。交汇处形成2.5-3度 下滑道。
飞机导航系统
• 导航是指引导飞机从某地沿预定的航线 安全、准确的飞达目的地的过程。 • 按照机载设备功能分为:无线电导航系统、 雷达系统、交通管制与警告系统、惯性基 准系统和飞行管理系统。
1、无线电导航系统
• 功用:利用来自地面台或空中的无线电 信号帮助驾驶员引导飞机沿正确航路飞 行。 • 包括ADF(自动定向机) • VOR(甚高频全向信标) • ILS(仪表着陆系统):引导飞机 安全着陆。由航向、下滑、指点信标系 统组成。
信号与系统课件第3章例题

X
2 22
R22
j
(M )2
R222
X
2 22
X 22
R22 X22 则 Zf1 0
Is C1 G1 L1
22
解 (3)如果ωL2=1/(ωC2),反射到初级的阻抗等于什么?
由
L2
1
C2
X 22 0
(M )2
(M )2
从
Zf1
Rf 1
jX f 1
R222
X
2 22
R22
j
R222
3L2 L1 L2 L1 500H
L1 375H L2 125H
24
X
2 22
X 22
(M )2
Z f 1 R22
R22
R2 QL2
R2 ( R1 Rx )QL21
QL
R2
L2
C2
G2
(M )2
Z f 1 R2 / QL2
(M )2
R2
QL2
(M )2
R2
(C2
G2
)2
(M
)2(C2 )2
G2
23
3-18 有一双电感复杂并联回路如图3-7所示。已知
所以 Cx 200 pF
+
L
R
1 1
Rx
Vs _ 1MHz 0.1V
C
Cx
12
4)求加入Zx 时Rx
QL
0L
R Rx
Vcm Vsm
2.5 25 0.1
Q0
0L
R
100
R 0L
Q0
Rx
0L
QL
R
0L
QL
《供配电技术》实验报告

《供配电技术》实验报告实验一供电线路的定时限过电流保护实验一、实验目的1.掌握过流保护的电路原理,深入认识继电保护二次原理接线图和展开接线图。
2.学会识别本实验中继电保护实际设备与原理接线图和展开接线图的对应关系,为以后各项实验打下良好的基础。
3.进行实际接线操作, 掌握过流保护的整定调试和动作试验方法。
二、预习与思考1.参阅有关教材做好预习,根据本次实验内容,参考图2-1、图2-2设计并绘制过电流保护实验接线图,参照图2-3。
2.为什么要选定主要继电器的动作值,并且进行整定?3.过电流保护中哪一种继电器属于测量元件?三、原理与说明对于3~66kV供电线路,作为线路的相间短路保护,主要采用带时限的过电流保护和瞬时动作的电流速断保护。
如果过电流保护时限不大于0.5~0.7s时,可不装设电流速断保护。
相间短路动作于跳闸,以切除短路故障。
带时限的过电流保护,按其动作时限特性分为定时限过电流保护和反时限过电流保护两种。
图2-1为定时限过电流保护的原理图,图2-2为其展开图。
图2-1 定时限过电流保护原理图定时限过电流保护的整定计算方法请参考相关教材,附录1有基于本实验一次系统参数的过电流保护整定计算详细过程。
定时限过电流保护的优点:动作时间比较精确,整定简便,而且不论短路电流大小,动作时间都是一定的,不会因为短路电流小动作时间长而延长故障时间。
缺点:所需继电器多,接线复杂,且需直流操作电源,投资较大;靠近电源处的保护装置,其动作时间较长,这是带时限过电流保护的共有缺点。
图2-2 定时限过电流保护展开图序号设备名称使用仪器名称数量1 LGP01 电流继电器 12 LGP04 时间继电器 13 LGP05 出口中间继电器 14 LGP06 信号继电器 15 LGP32 交流数字真有效值电流、电压表 16 监控台电流互感器二次信号 1五、实验步骤实验前准备:1)将实验系统总电源开关断开,将监控台的“实验内容选择”转换开关旋到“线路保护”档;2)将所有监控台上所有电流互感器(实验中需要接线的除外)二次侧短接;3)合上实验系统电源开关,监控台电源开关,PLC电源开关,开始以下实验内容。
信号与系统第三章(Lec)

线性时不变系统的时域分析
描述方程
线性时不变系统的数学模型通常 由微分方程或差分方程表示,如 Laplace变换、Z变换等。
冲激响应
系统的冲激响应h(t)是系统对单位 冲激信号δ(t)的响应,可以用来描 述系统的动态特性。
阶跃响应
系统的阶跃响应g(t)是系统对单位 阶跃信号u(t)的响应,可
极点
系统函数的极点是使得系统函数 值为无穷大的复数点,对应于系 统的稳定性。
02
零点
系统函数的零点是使得系统函数 值为零的复数点,对应于系统的 频率响应特性。
03
极点与零点对系统 性能的影响
极点和零点的分布决定了系统的 频率响应特性、稳定性以及动态 性能。
系统响应的计算方法
02
CATALOGUE
信号的基本特性
信号的时域特性
周期性
信号在时间上重复出现,具有周期性。周期 是信号重复一次所需的时间长度。
连续性
信号在时间上是连续不断的,即信号在任意 时间点都有对应的值。
确定性
信号在时间上是确定性的,即信号在任意时 间点上的值是确定的。
可变性
信号在时间上是可变的,即信号在任意时间 点上的值可以改变。
定义
系统的幅度响应是描述系统 对不同频率信号的幅度变化 。
分类
最大幅度、最小幅度、平均 幅度等。
意义
幅度响应决定了系统对不同 频率信号的增益,影响信号 的强度和信噪比。
系统的群延迟响应
定义
系统的群延迟响应是描述系统对信号的群延迟效 应。
分类
恒定群延迟、线性群延迟等。
意义
群延迟影响信号的传播速度和波形,对信号的完 整性、失真度和处理效果有重要影响。
杭州项目包括:SCATS交通信号控制系统、交通监视系统、交通违法监测系统、交通诱导系统等四个系统设备
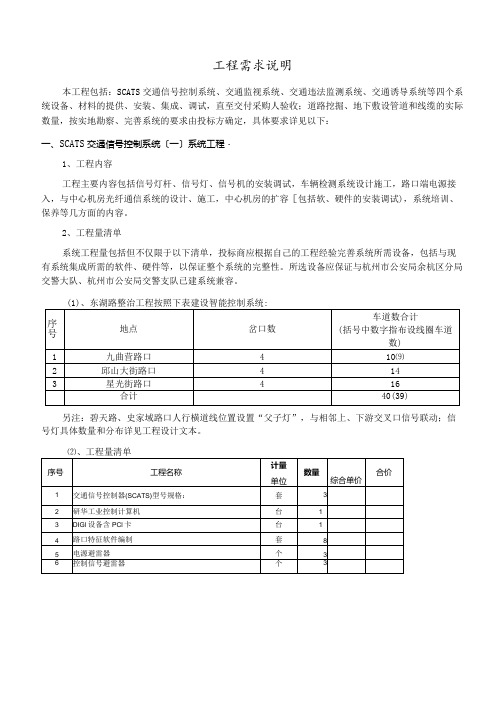
工程需求说明本工程包括:SCATS交通信号控制系统、交通监视系统、交通违法监测系统、交通诱导系统等四个系统设备、材料的提供、安装、集成、调试,直至交付采购人验收;道路挖掘、地下敷设管道和线缆的实际数量,按实地勘察、完善系统的要求由投标方确定,具体要求详见以下:一、SCATS交通信号控制系统〔一〕系统工程・1、工程内容工程主要内容包括信号灯杆、信号灯、信号机的安装调试,车辆检测系统设计施工,路口端电源接入,与中心机房光纤通信系统的设计、施工,中心机房的扩容[包括软、硬件的安装调试),系统培训、保养等几方面的内容。
2、工程量清单系统工程量包括但不仅限于以下清单,投标商应根据自己的工程经验完善系统所需设备,包括与现有系统集成所需的软件、硬件等,以保证整个系统的完整性。
所选设备应保证与杭州市公安局余杭区分局交警大队、杭州市公安局交警支队已建系统兼容。
另注:碧天路、史家域路口人行横道线位置设置“父子灯”,与相邻上、下游交叉口信号联动;信号灯具体数量和分布详见工程设计文本。
(二)系统功能;标准路口交通环境。
通过系统化的路口交通工程设计,标准路口的渠化、交通信号和交通标志分布,均衡路网中的交通分布;安装标准的、稳定可靠及功能灵活的交通控制设备和系统,使系统能满足各种交通控制的需求;系统运行时可连续准确地采集大量现场交通数据,通过对交通数据的采集、保存和处理,不仅直接用于交通控制,还可以为交通指挥调度和城市交通规划提供准确的量化依据;从区域乃至全局的角度实时优化交通控制,缓解交通拥挤,缩短通行时间,减少交通事故、降低交通污染、提高现有道路的通行能力。
主要部件要求:1、信号灯杆:信号灯杆由建设局统一制作,该工程中标人按照设计方案,以及招标文件的有关要求进行安装调试(说明:其它系统立杆的要求同该条)。
2、信号灯:交通信号灯由独立的发光单元组成,发光单元具有无色的透光面,信号灯的外壳、色片及密封圈外表平滑,无缺料、无开裂、无银丝、无明显变形和毛刺等缺陷;信号灯发光单元透光面尺寸为Φ400mm∖Φ300三,发光强度到达ttB-148872003道路交通信号灯》的相关标准。
嵌入式系统试题库

嵌入式系统试题库一、选择题(20分)1、下列描述不属于RISC 计算机的特点的是()。
A. 流水线每周期前进一步。
B. 更多通用寄存器。
C. 指令长度不固定,执行需要多个周期。
D. 独立的Lo a d和St or e指令完成数据在寄存器和外部存储器之间的传输。
2、存储一个32位数Ox2168465到2000H,....__,2003H四个字节单元中,若以小端模式存储,则2000H 存储单元的内容为()。
A 、Ox21A 、OvB、Ox68B 、3.3vC 、Ox65C 、+sv ,..___,+15vD 、Ox023、RS232-C 串口通信中,表示逻辑1的电平是()。
D 、-5v ,.___,-15v4、ARM 汇编语句"A DD R O, R 2, R 3, LSL#l"的作用是()。
A. R O= R 2 + (R3 << 1)C. R 3= R O+ (R 2 << 1) B. R O=(R 2<< 1) + R 3D. (R 3 << 1)= R O+ R2 5、I RQ中断的入口地址是()。
A 、OxOOOOOOOOB 、Ox00000008C 、Ox00000018D 、Ox000000146、S3C 2440X 1/0口常用的控制器是()。
A. 端口控制寄存器(GP A C ON -G PJ C O N )。
B. 端口数据寄存器(GPA DAT-G PJ D AT )。
C. 外部中断控制寄存器(EXT I N T n )。
D. 以上都是。
7、GET伪指令的含义是()A. 包含一个外部文件B. 定义程序的入口C. 定义一个宏D. 声明一个变量8、A DD R O, R l, #3 ; #3属于()寻址方式。
A. 立即寻址B. 多寄存器寻址C. 寄存器直接寻址D. 相对寻址9、ARM 指令集和Th um b 指令集分别是()位的。
电力系统继电保护实验
《电力系统继电保护》实验报告实验一供电线路的电流速断保护实验一、实验目的1.掌握电流速断保护的电路原理以及整定计算方法。
2.理解电流速断保护和过电流保护的优缺点。
3.进行实际接线操作, 掌握两段过流保护的整定调试和动作试验方法。
二、预习与思考1.参阅有关教材做好预习,根据本次实验内容,参考两段式过电流保护的原理图及展开图。
2.电流速断保护为什么存在“死区”,怎样弥补?三、原理与说明通过上一个实验可以了解,过电流保护有一个明显的缺点,为了保证各级保护装置动作的选择性,势必出现越靠近电源的保护装置,其整定动作时限越长,而越靠近电源短路电流越大,因此危害更加严重。
因此根据GB50062-1992规定,在过电流保护动作时间超过0.5~0.7s时,应装设瞬时动作的电流速断保护装置。
电流速断保护的整定计算方法请参考相关教材,也可参考附录1的基于本实验一次系统参数的电流速断保护整定计算。
由电流速断保护的整定计算公式可知,电流速断保护不能保护本段线路的全长,这种保护装置不能保护的区域,称为“死区”,因此电流速断保护必须与带时限过电流保护配合使用,过电流保护的动作时间应比电流速断保护至少长一个时间级差Δt=0.5~0.7s,而且须符合前后过电流保护动作时间的“阶梯原则”,以保证选择性。
五、实验步骤实验前准备,实验步骤如下:1.按电流速断保护实验接线图进行接线2.参照实验指导对电流继电器进行整定调试。
3.调整自藕变压器和可调电阻,分别测试动作值和返回值。
图2-4a 电流速断保护实验接线图(交流回路)图2-4b 电流速断保护实验接线图(信号回路)图2-4c 电流速断保护实验接线图(直流回路)六、实验报告1.安装调试及动作试验结束后要认真进行分析总结,按实验报告要求及时写出电流速断保护的实验报告。
2.记录电流速断保护动作值,返回值和试验的操作步骤。
3.分析说明电流速断保护装置的实际应用和保护范围。
实验二供电线路的定时限过电流保护实验一、实验目的1.掌握过流保护的电路原理,深入认识继电保护二次原理接线图和展开接线图。
高频电子线路第五版课后答案张肃文
?
?45.97(mhz)
(2)rl折合到回路两端时的接入系数p为
1?c2c11p???
c1?c22?12
c1?c2
则
11?0.52??0.05?10?3?s? 3rl5?10
电感l的损耗电导g0为
p2
g0?
11
?
?0lq02??45.97?106?0.8?10?6?100
?43.30?10?6?s? 1121总电导g???g0?p??0.0433?10?3?0.05?10-3 3rrl10?10
2?l?3?
1
2
2
??100?c?535得c?-1pf?不合理舍去
。
?
1
?0?c?c??
?2?3.14
?535?10
32
?
??450?40??10
?12
?
3?5解:q
?
1
?0c0r1
2
?
1
2?3.14?1.5?10
1
?100?10
-12
?5
?212
l0?
?0c0vomr
?
?
?2?3.14
-3
?1.5?10
?0.1933?10
?3
?s?
谐振电阻rp?g??5.17?k??
========================================================================================
第四章高频小信号谐振放大器
1.高频小信号放大器的主要技术指标有、_________、________、__________。(谐振频率、增益、通频带、选择性)
第九章 状态变量

状态方程! 状态方程!
如果电感电压为所求未知量, 如果电感电压为所求未知量,则:
uL = −uC − RiL +uS 1
E-mail:lynwindsent@
输出方程! 输出方程!
返 回
Tel:22896276
广东医学院生物医学工程教研室
信号与线性系统
状态方程一般写成矩阵的形式: 状态方程一般写成矩阵的形式:
返 回 E-mail:lynwindsent@ Tel:22896276
广东医学院生物医学工程教研室
信号与线性系统
三、已知系统模拟图,列写状态方程 已知系统模拟图,
以积分器的输出作为状态变量, 以积分器的输出作为状态变量,输入就 是状态变量的导数。 是状态变量的导数。
f(t)
返 回 E-mail:lynwindsent@ Tel:22896276
广东医学院生物医学工程教研室
信号与线性系统
支路: ① ② ③支路:
C2u'C2 + iL + iS = 0
uC1 −uS 支路: ② ④ ⑤支路: Cu' + +iL = 0 1 C1 R
(4)写出电感连枝相关的 写出电感连枝相关的KVL方程: 方程: 写出电感连枝相关的 方程
(2,7) , )
(3,6,7) , , )
(4,6,8) , , )
返 回 E-mail:lynwindsent@ Tel:22896276
广东医学院生物医学工程教研室
信号与线性系统
5、列出基本回路的KVL方程 、列出基本回路的 方程
di7 L7 = −u2 −u3 dt
Li 'L −uC2 −uC1 + uS = 0
《信号与系统》课程讲义2-1

§2.1 微分方程的建立与求解
5.机械类微分方程建立例子 . [例2]:理想火箭推动器模型的微分方程 例 : 火箭 m1
v1 (t )
输入推进力e(t)
k
载荷 m2
输出荷载舱速度 v2 (t )
摩擦系数f1
摩擦系数f2
§2.1 微分方程的建立与求解
解:e(t ) f 1v1 k ( v1 v 2 )dt = m1 dv1 ∫
α + 2α + 3α = 0 α1, 2 = 0(二重),
3 2
rh (t ) = ( At + A2 ) + ( A3 cos 2t + A4 sin 2t ) e 1
α 3, 4 = 1 ± 2 j (一重共轭)
t
§2.1 微分方程的建立与求解
[例3]:求下列微分方程的齐次解形式 例 : ⑤
§2.1 微分方程的建立与求解
iv) e(t ) = te t u(t )
t r (2 t )e,-1为1重特征根,p (t ) = t ( B0 t + B1 )e t t>0时自由项= 代入左端令对应系数相等可得: 0 = 1 , B1 = 3 B 2 t v) e(t ) = e u(t )
§2.1 微分方程的建立与求解
2.网络拓扑约束 . ①电路系统 N i)KVL: v = 0
∑
k =1
k
ii)KCL:
∑i
k =1
N
k
=0
②机械系统:达朗贝尔原理 M i) F =0
∑
i =1
N k =1
i
ii)
∑v
k
=0
§2.1 微分方程的建立与求解
西北师范大学物理与电子工程学院

杨鸿武
电子与通信工程(085208) 摆玉龙
01 不区分研究方向
马永杰
裴东
宋海声
梁西银
火元莲白晓娟
刘英挺
招生 学制、学 计划 习方式
考试科目
①101 思想政治理论
②204 英语二或 202 俄语或 203 日语 选一
③302 数学二
④844 信号与系统
40(含 推免 生)
三年 全日制
01 袁 萍 4(含 02 李鹏程 推免 03 马书懿 生) 04 苏茂根
符彦飚
①101 思想政治理论
三年 全日制
②201 英语一 ③621 高等数学(含线性代数) ④813 量子力学
复试科目:普通物理 946
1.电动力学 2.热力学与统计物理
01 马书懿 2(含 02 王成伟 推免 03 孙爱民 生)
赵松峰
教授/博导
原子与分子物理
强激光场中的原子分子 物理
https:///Art icle.do?id=18903 zhaosf@
符彦飙
教授/硕导
光学
等离子体光谱学
https:///Art icle.do?id=19107 fuyb@
05 贾多杰 孙艳军
06 凝聚态理论
06 段文山 薛具奎
贾多杰
07 光与物质的相互作用
07 张爱霞 薛具奎
017 物理与电子工程学院
原子与分子物理(070203)
01 原子结构与原子碰撞
01 董晨钟
02 强激光场中的原子分子物理 02 赵松峰
03 团簇性质与应用 04 大气环境中的原子与分子过程
李鹏程
王国利
教授/硕导 原子与分子物理
光与原子的相互作用
基康仪器_GL系列无线广域网数据采集系统

供电
功耗
IP67
覆盖能力 覆盖半径
≤5W
最远可达15km(取决于网关天线、终端 高度和通视条件)
GL2-G无线网关安装固定方式
抱杆安装
围栏安装
(管径Φ 50~60mm) (喉箍固定)
围栏安装
(螺栓固定)
光伏供电安装
(抱杆安装)
GL2-G无线网关的系统防雷
GL2系列无线终端
• 传感器支持
支持振弦式、差阻式、标准信号式、 电位计式以及数字式等。同时提供6通道振 弦式传感器终端,方便基康多点位移计与 锚索测力计的接入。
型号 终端类型 GL2-VW 单振弦式 G L2-VW-6 6振弦式 G L2-VM 标准信号式 G L2-CR 差动电阻式 G L2-LP 线性电位器式 G L2-SM 数字式
功能
允许连接1支完 允许连接6支完 允许连接1支标 允许连接1支差动 整振弦式传感器 整振弦式传感器 准信号式传感器 电阻式传感器
用螺钉挂件固定 于墙面
挂墙
抱箍安装
用喉箍固定 在立管上
置于PVC顶端 或内部
插管
混凝土、岩石表面或地表 (仅限近距离使用)
浅埋(伪装)
GL无线广域网数据采集系统_采集设备
随时随地WEB登陆系统管理 查看/浏览/导出数据、输出报表
个人电脑登录
• 查看/浏览数据及获取预警; • 终端信息查看/配置、本地 存储数据提取。
手机端APP
用于维护/调试网关、查 询终端相关信息
专用路测终端
• 数据存储
200组本地数据存储、确保断网后采集 数据不丢失。
• 蓝牙通讯接口 • 即装即用
支持磁性钥匙唤醒,通过蓝牙手机读 数、查看存储数据、调试和配置。
信号与系统课程实验系统设计
Ke o d y w r s: sg a n y tm s vru x erme ts se ; t e r tc e c i in la d s se ; it a e p i n y tm l h o eia ta hng; p a tc e c ig l r cia t a hn l
Ab ta t B cu etee u eo in la d sse hsmu he ne t n btatd c n e t t sdfc l frsu e t t n esa d sr c : e a s h o r fs a n ytm a c o tn d a srce o c p ,i i iiuto td ns ou d rtn s g a
t e c r n x e i n a h n o d t n o in n y t m n h a s o e vr a x e me t lt r , i o i ain w t h u r te p r e me t e c i g c n i o fs a a d s se a d te f w ft i u e p r na p a o m t i gl l h tl i l f n c mbn t i o h t e p a t a x e me t t a hn o tn , t ev r a x e i n a s s m f i a n y t m a e eo d h r cil e p r ns e c i g c ne t h i u l p rme t y t o g l d s se W d v lp .T i y t m ls s te c i t e l e sn a s e h ss se co e h
基于安全性建模的民机ILS信号设计袁心悦,
第46卷 第4期2024年4月系统工程与电子技术SystemsEngineeringandElectronicsVol.46 No.4April2024文章编号:1001 506X(2024)04 1255 09 网址:www.sys ele.com收稿日期:20230202;修回日期:20230417;网络优先出版日期:20231024。
网络优先出版地址:http:∥kns.cnki.net/kcms/detail/11.2422.TN.20231024.1513.026.html 通讯作者.引用格式:袁心悦,陈洪,丁璐,等.基于安全性建模的民机ILS信号设计[J].系统工程与电子技术,2024,46(4):1255 1263.犚犲犳犲狉犲狀犮犲犳狅狉犿犪狋:YUANXY,CHENH,DINGL,etal.ILSsignaldesignbasedonmodelingofsafetyforcivilaircraft[J].SystemsEngineeringandElectronics,2024,46(4):1255 1263.基于安全性建模的民机犐犔犛信号设计袁心悦1,陈 洪2,丁 璐2, ,宋 磊3,黄 丹1(1.上海交通大学航空航天学院,上海200240;2.广西大学电气工程学院,广西南宁530004;3.上海交通大学电子信息与电气工程学院,上海200240) 摘 要:针对当前均匀分布的仪表着陆系统(instrumentlandingsystem,ILS)信号无法反映出真实安全性变化的问题,提出了基于高斯量化的ILS安全性信号设计方法。
首先,基于运行安全性确定安全范围并在此基础上进行逆向设计,对飞行安全性进行高斯量化。
然后,从提高飞行员情景意识出发,提出在安全范围内的不同偏移角度下,仪表刻度变化率与安全性变化率保持一致的安全性信号设计方法。
最后,构建了飞行员认知模型,在民机最后进近场景中,对不同初始偏航角度进行了仿真实验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
f (t ) e
e
j t
dt
F ( j) f (t ) e
t j t
d t f (t ) e( j )t d t jω
Fb ( s) f (t )e st d t
0 α σ
一、从拉普拉斯变换到z变换
右移:
双:信息全 单:信息多
f(k-2)
k f(k-2)ε(k) 3 k
k
k
二、移位特性
单边、双边Z变换差别大!
5 k 5 k 5, k 5
5
5 k 例1 f ( k ) 0 F ( z ) f (k )z k
k
f(k)
5
f(k)ε(k)
双:信息全 左移: 单:信息丢
f(k+2)
1 z 1 z ,z 1 cos(k ) (k ) j j 2 ze 2 ze
二、移位特性
单边、双边Z变换差别大!
5 k 5 k 5, k 5
5
5 k f (k ) 0 F ( z ) f (k )z k
k
f(k)
5
f(k)ε(k)
k
k 0
称为序列f(k)的 双边z变换
称为序列f(k)的 单边z变换
若f(k)为因果序列,则单边、双边z 变换相等,否则不 等。今后在不致混淆的情况下,统称它们为z变换。 F(z) = Z[f(k)] , f(k)= Z-1[F(z)] ; f(k)←→F(z)
1730年英国数学家棣莫弗(De Moivre)将生成函 数的概念用于概率论的研究,其实这就是Z变换。 19世纪拉普拉斯,20世纪沙尔等人继续在这一方面做 出了贡献。 Z变换在当时并没有发挥多大的作用。 到了20世纪50-60年代,控制系统和数字计算机的出 现使Z变换开拓了应用空间。 Z变换在离散信号系统的地位相当于拉普拉斯变换在连 续信号系统中的地位。
k
f (kT ) (t kT )e st dt
k
f (kT )e skT
令z = esT,上式将成为复变量z的函数,用F(z)表示;
二、z变换定义--离散的拉普拉斯变换 k k F ( z ) f (k )z F ( z ) f (k )z
F2 ( z ) f 2 ( k ) z k 3 2 z 1 z 2 收敛域为z > 0
k 0
对有限序列的z变换的收敛域一般为0<z<∞, 有时它在0或/和∞也收敛。
例2 求因果序列
解:根据定义
k 0
N
0, k 0 f y (k ) a (k ) k a , k 0
k
k
可见,其单边、双边z变换相等,与z 无关,所 以其收敛域为整个z 平面。
例1求以下有限序列的z变换(1) f1(k)=(k) ↓k=0 (2) f2(k)={1 , 2 , 3 , 2,1}
k
F ( z ) f (k )z 解 (2) f2(k)的双边z 变换为 k 2 + 2z + 3 + 2z-1 + z-2 收敛域为0<z<∞ F2(z) = z f2 (k)的单边z变换为
对连续信号进行均匀冲激取样,就得到离散信号: f S ( t ) f ( t ) T ( t ) f ( t ) ( t kT ) f ( KT ) ( t kT ) k k 取双边拉普拉斯变换: st st F ( s) f s (t )e dt f (kT ) (t kT )e dt k
k
k 0
称为序列f(k)的 双边z变换
称为序列f(k)的 单边z变换
傅里叶变换中,e-jωt, ω 拉普拉斯变换中,e-st=e-(σ+jω)t,s=σ+jω Z变换中,z-k=e-skT=e-(σ+jω)kT,z= esT=e(σ+jω)T
二、z变换定义--离散的拉普拉斯变换 k F ( z ) f (k )z k F ( z ) f (k )z
解:根据定义 1 ( az 1 ) N 1 lim Fy (z ) N 1 az 1 当az-1=1,结果不确定; 当az-1>1,结果无穷大,无界; 当az-1<1,(az-1)N+1在N无穷大时为0,
0, k 0 f y (k ) a (k ) k a , k 0
常用序列z变换 1. (k ) 1 ,z>0
z 2. (k ) ,z>1 z 1 z (-k-1) ↔ ,z<1 z 1 z k ,|z|>|a| 3. a ( k ) za z k ,|z|<|b| b ( k 1)
第六章
离散系统的z域分析
在连续系统中,为了避免解微分方程,我们通过 拉氏变换(数学方法)把微分方程转换为代数方程。 出于同样的目的,也可以通过另外一种数学工具---z变 换,把差分方程转换为代数方程。 §6.1 z 变换 • 从拉普拉斯变换到Z变换
• Z变换定义
• 收敛域
从傅里叶变换到拉普拉斯变换
若f(k)为因果序列,则单边、双边z 变换相等,否则不 等。今后在不致混淆的情况下,统称它们为z变换。 F(z) = Z[f(k)] , f(k)= Z-1[F(z)] ; f(k)←→F(z)
三、收敛域
序列的收敛域大致有一下几种情况: (1)对于有限长的序列,其双边z变换在整个平面; (2)对因果序列,若z变换存在,单双边相同,收敛 域为某个圆外区域; (3)对反因果序列,双边z变换,若存在,收敛域为 某个圆内区域,单边z变换为零; (4)对双边序列,单双边如果都存在,双边z变换的 收敛域为环状,单边z变换的收敛域为圆外区域;
组成的集合称为z变换F(z)的收敛域。
例1求以下有限序列的z变换(1) f1(k)=(k) ↓k=0 (2) f2(k)={1 , 2 , 3 , 2,1}
k
解(1)F1 ( z ) k ( k ) z
(k ) 1
k
F ( z ) f (k )z
三、收敛域
z变换定义为一无穷幂级数之和,显然只有当该 幂级数收敛,即 f ( k ) z k 时,其z变换才存在。上式称为绝对可和条件,它是 序列f(k)的z变换存在的充分必要条件。
k
收敛域的定义:
对于序列f(k),满足
k
f (k )z
k
所有z值
k
的z变换
k
Fy ( z ) a k z k (az1 )k
k 0
1 k
F ( z ) f (k )z k
1 ( az 1 ) N 1 lim ( az ) lim N N 1 az 1 k 0
例2 求因果序列
物 理 科 学 与 技 术 学 院
济 南 大 学
第 六 章 离 散 系 统 的 域 分 析
N
Tell Me Why Declan Galbraith
In my dream, children sing a song of love for every boy and girl . The sky is blue and fields are green and laughter is the language of the world. Then I wake and all I see is a world full of people in need. Tell me why(why), does it have to be like this? Tell me why(why), is there something I have missed? Tell me why(why), cos I don't understand, when so many need somebody, we don't give a helping hand. Tell me why? Every day, I ask myself, what will I have to do to be a man? Do I have to stand and fight, to prove to everybody who I am? Is that what my life is far, to waste in a world full of war?
收敛域为|z|< |b|
bk , k 0 bk ( k 1) 求反因果序列 f f (k ) k 0, N 1 0 1 1
的z变换
jIm[ z]
|b|
o Re[z]
z F f (z) zb
b k , k 0 的z变换 例4 双边序列f(k)=fy(k)+ff(k)= k a , k 0
b ( k 1) z
1
F ( z ) f (k )z
k
( bz 1 ) k
m=-k
( b 1 z ) m
b 1 z (b 1 z ) N 1 lim N 1 b 1 z
m 1
例3
b z (b z ) 解 Ff (z ) lim N 1 b 1 z 当b-1z=1,结果不确定; 当b-1z>1,结果无穷大,无界; 当b-1z<1,(b-1z)N+1在N无穷大时为0,