注塑机机械手说明书
注塑机机械手装机配电手册
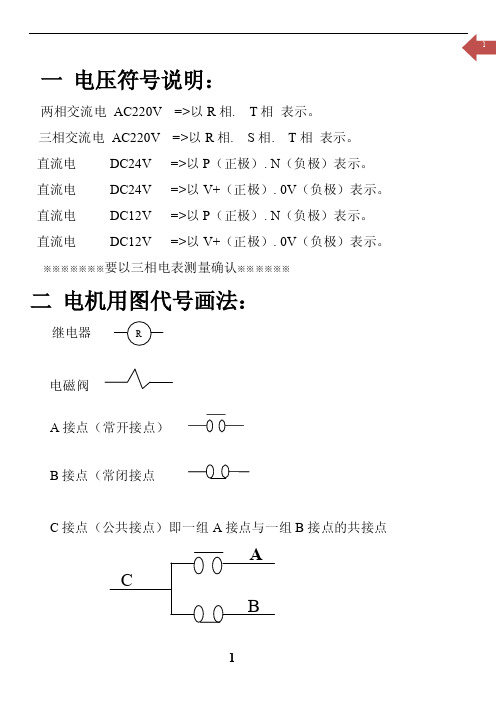
一 电压符号说明: 两相交流电 AC220V =>以R 相. T 相 表示。
三相交流电 AC220V =>以R 相. S 相. T 相 表示。
直流电 DC24V =>以P (正极). N (负极)表示。
直流电 DC24V =>以V+(正极). 0V (负极)表示。
直流电 DC12V =>以P (正极). N (负极)表示。
直流电 DC12V =>以V+(正极). 0V (负极)表示。
※※※※※※※要以三相电表测量确认※※※※※※二 电机用图代号画法: 继电器电磁阀A 接点(常开接点)B 接点(常闭接点C 接点(公共接点)即一组A 接点与一组B 接点的共接点三 造裕机械手信号接线定义:开模安全 12此接点为一“常开接点A(接点)”, 即机械手下降至模内时, 此接点为断路射出机不能开模.关模安全 34此接点为一“常开接点A(接点)”, 即机械手下降至模内时, 此接点为断路射出机不能关模.突模延迟 67此接点为一“常开接点A(接点)”, 即自动时机械手顶针延时时间到, 此接点为短路射出机才能顶出.关模启动 8 9此接点为一“常开接点A(接点)” 且为一瞬间接点, 即自动时机械手下降取物上升后, 此接点为短路直到开模完信号断路, 此接点即断路.开模完成信号11此接点为射出机已开模完成停止信号, 机械手可下降的信号, 需是一组电源输入至机械手, 此信号可为DC12V ,DC24V ,AC220V , 只需更换机械手机身继电器板 RY1 继电器.安全门信号 13此接点为射出机安全门已关上信号, 需是一组电源输入至机械手, 此信号可为DC12V ,DC24V ,AC220V , 只需更换机械手机身继电器板 RY0 继电器.电源 AC220V 14号 15号 电线四机械手信号接线方法:1 开模完成信号:⑴旧型继电器回路射出机。
如开模完成信号开关,没有单独输出则采用下列接法需加一个继电器。
注塑机操作手册

注塑机操作手册1 操作方式操作手册里面的说明可让您对HMI的面板按键及屏幕画面更熟悉。
假如找不到您要的或想寻找更多按键及屏幕画面的相关数据, 请查询操作画面的相关部份。
1.1 开关模单元的设定当您在更换模具时, 请完全依照机械厂人员所教您的方法,以避免造成人员受伤。
当模具安装完成后,请确定模具,座台及射出单元是否已调好整适当数据,以避免机器的损坏. 除此之外, 您必须确定料管是否与模具连接好及模具是否已被安全地固定好。
1。
1.1 如何调整模具厚度(直压机不使用此部份)在重新装置模具时, 使用调模按键去调整模具的厚度。
按“调模进”键来调整减少模具厚度(降低在静态模座及动态模座之间距离) 或按“调模退”键来调整增加模具厚度(增加在静态模座及动态模座之间距离)。
持续按此键,模座会连续动作.此模座将会面慢慢移动和停止。
持续按此键维持1秒以上模座将开始连续移动, 放开此键将停止模座的移动.假如您按此键并立即的放开, 此模座将慢慢的移动及停止也就是所谓“微调"。
您可以重复操作将模座移到所要求的位置.关机并安装新的模具。
当您已经安装好新的模具,请关上安全门并开机然后按调模使用键,才可使用手动调模动作。
模具更换之后,您可在托模画面中(也就是屏幕上的F2)来改变调模的速度及压力设定。
假如有必要, 您也可为新的模具设定模具数据或加载已设定好的模具数据。
当调整的数据设定完成后,再按一次调模使用键来关闭模具。
当模具关闭之后,控制器会照我们所设定的数据执行自动调模。
当自动调模已经执行完成, 所有的动作将会停止并且会发出警报声。
此时,就会退回手动的状态下。
请注意: 为了安全起见,必须先回到手动模式下,才可使用模具调整键或手动键.假如您想要使用其它的模块, 请在手动模式状态下再改变您想要的模块.假如在模具调整当中您遇上问题,请按下手动键,来为紧急重制停止动作.1.1.2 关模及如何保护模具关模可执行四段压力速度:关模快#1, 关模快#2,关模低压和关模高压。
艾尔发注塑机机械手使用说明

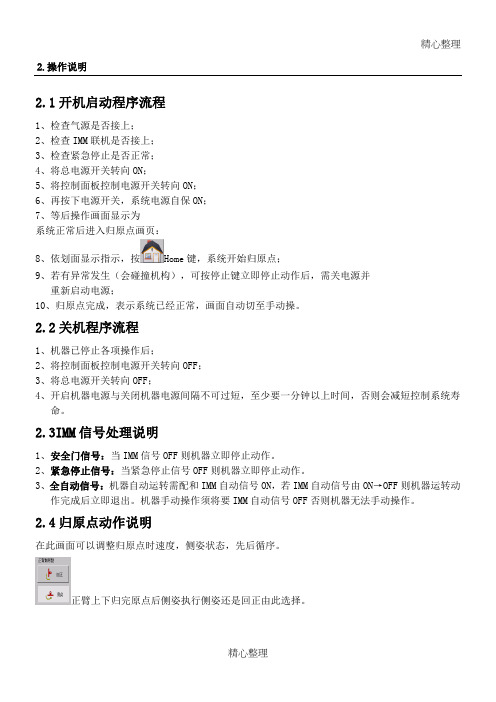
2.操作说明2.1 开机启动程序流程1、检查气源是否接上;2、检查IMM联机是否接上;3、检查紧急停止是否正常;4、将总电源开关转向ON;5、将控制面板控制电源开关转向ON;6、再按下电源开关,系统电源自保ON;7、等后操作画面显示为系统正常后进入归原点画页:8、依划面显示指示,按Home 键,系统开始归原点;9、若有异常发生(会碰撞机构),可按停止键立即停止动作后,需关电源并重新启动电源;10、归原点完成,表示系统已经正常,画面自动切至手动操。
2.2 关机程序流程1、机器已停止各项操作后;2、将控制面板控制电源开关转向OFF;3、将总电源开关转向OFF;4、开启机器电源与关闭机器电源间隔不可过短,至少要一分钟以上时间,否则会减短控制系统寿命。
2.3 IMM信号处理说明1、安全门信号:当IMM信号OFF则机器立即停止动作。
2、紧急停止信号:当紧急停止信号OFF则机器立即停止动作。
3、全自动信号:机器自动运转需配和IMM自动信号ON,若IMM自动信号由ON→OFF则机器运转动作完成后立即退出。
机器手动操作须将要IMM自动信号OFF否则机器无法手动操作。
2.4归原点动作说明在此画面可以调整归原点时速度,侧姿状态,先后循序。
正臂上下归完原点后侧姿执行侧姿还是回正由此选择。
键把归原点速度按不同比例降低键把归原点速度按不同比例升高。
选择归原点个轴先后循序。
正常情况下先MZ,SZ再Mx,Sx,最后Y轴。
归原点循序更改一定要注意各轴安全。
发现归原点如果与模具等有干涉,进入手动画页,操作到安全位置后再归原点。
开机后警报或警告处理完成,按此键。
机器正常,按此键归原点。
系统归原点中。
归完原点后切至手动画页。
2.5手动操作说明2.5.1画面按键介绍画页切换到顶页画页切换到上一页画页切换到下一页画页切换到末页选择O点输出ON选择O点输出OFF各轴寸动操作。
操作过程中碰到极限开关勾选“馬達強制激磁”,按键,反方向操作轴寸动。
注塑机机械手使用方法
注塑机机械手使用方法注塑机机械手是一种用于注塑机操作和自动化生产的设备。
它具有精确的定位控制,高效的作业速度和稳定的运行性能,被广泛应用于制造业的各个领域。
下面将详细介绍注塑机机械手的使用方法。
一、安装调试1. 检查注塑机机械手的外观和内部结构,确认设备完好无损。
2. 将机械手安装在注塑机旁边的工作台上,确保机械手与注塑机之间有足够的操作空间。
3. 将机械手的电源线和控制线连接到对应的电源和控制系统上。
4. 根据注塑机的参数设置,对机械手进行调试和校准,确保它能够准确地抓取注塑件并进行操作。
二、操作流程1. 开机准备a. 打开注塑机和机械手的电源开关。
b. 启动注塑机和机械手的控制系统,并进行初始化。
c. 清理注塑机的工作台和周围环境,确保工作环境整洁。
2. 参数设置a. 根据注塑件的尺寸、重量和工艺要求,设置机械手的抓取和操作参数,包括抓取点坐标、速度、力度等。
b. 根据生产任务的要求,设置机械手的作业模式,如单循环操作、连续运行、自动换模等。
3. 作业操作a. 手动操作:通过控制面板或操作手柄控制机械手进行手动操作,包括移动、抓取、放置等。
进行手动操作时,需要操作员具备相关技术和经验,确保操作安全和准确。
b. 自动化操作:通过预设程序和触发信号,实现机械手的自动化操作。
操作员只需设置好注塑机和机械手的参数,启动自动操作模式,机械手将按照预设程序进行操作,减少人工干预和提高生产效率。
4. 监控和调试a. 在操作过程中,及时监测机械手的运行状态和作业效果,如抓取力度、抓取准确度等。
如有异常或问题,及时进行调整和修复。
b. 定期对机械手进行保养和维护,清洁抓取爪、油润滑系统、检查电气部件的连接情况等,确保设备的正常运行和延长使用寿命。
5. 安全操作a. 在操作注塑机机械手时,操作员应严格按照操作规程进行操作,遵守安全生产规范。
b. 在进行机械手操作前,确保注塑机停止工作,避免误操作引起事故。
6. 故障排除a. 如果机械手出现故障或异常,及时停机排除故障,避免对生产环节造成影响。
注塑机机械手说明书.docx
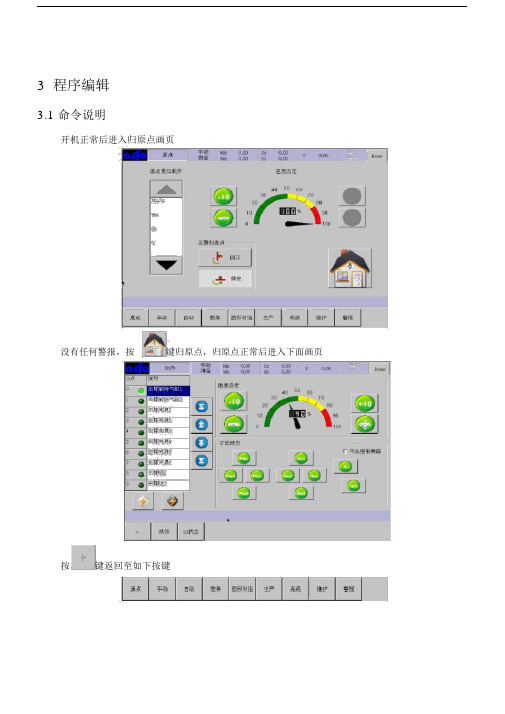
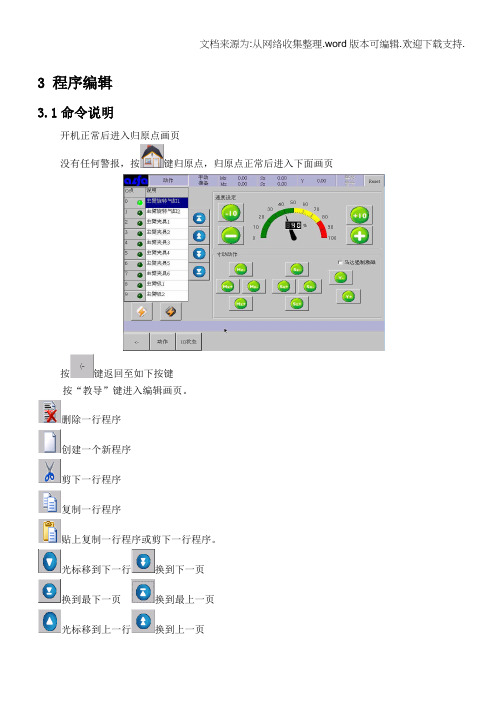
3程序编辑3.1 命令说明开机正常后进入归原点画页没有任何警报,按键归原点,归原点正常后进入下面画页按键返回至如下按键按“教导”键进入编辑画页。
3.1.1编辑器说明删除一行程序创建一个新程序剪下一行程序复制一行程序贴上复制一行程序或剪下一行程序。
光标移到下一行换到下一页换到最下一页换到最上一页光标移到上一行换到上一页把程序内容显示扩大编辑各功能键说明3.1.2教导指令1)直线(轴直线运动操作)按键进入各轴直线运动操作。
轴操作有两种方式,第一、直接通过数字键盘输入各轴位置;第二、通过右边各轴寸动键操作到所需位置,按左边“ MX ”等一个键把当前位置设到对画框内。
如果要全部设入,按键。
当通过数字键盘输入各轴位置时,一定要注意所设定值是否安全。
2)速度按键进入速度设定。
3)计时按键进入延时功能设定。
4)一般 I/O按键进入侧姿回正等选择。
5)成型 I/O按键进入成型相关条件设定。
6)治具 I/O按键进入治具相关功能设定。
7)周边 I/O按键进入周边相关功能设定。
8)回圈按键进入循环功能设定。
9)跳跃按键进入跳转功能设定。
10)停止按键进入程序完成设定。
11)宏按键进入调用已经编好的子程序。
编号为 0~99 共 100 个。
12)堆叠按键进入装箱取物功能设定。
编号为 0~3 共 4 个。
13)运算按键进入相关功能设定。
此功能在高阶编程内做详细说明。
为变数。
3.1.3编辑新程序1)程序保存归完原点后进入如下操作页面点击按钮,屏幕下方显示如下菜单单击,进入教导画面点击档案按钮进入如下画面在此页点击按钮,切换到如下画面点击模具编号空白框,弹出输入键盘如下输入模具编号,点击,再点击保存按钮。
在此画面中可以根据模具产品功能需要,编辑各式程序。
下面进入正式教导阶段:2)速度按键进入如下画面点击空白框,弹出输入键盘,输入速度值,点击,输入完毕,返回以上画面,点击,进入如下画面此速度为在下一速度设定前直线运动时各轴的运动速度,如果以下程序中没有再设定其它速度,整个程序中轴运动都以此速度运行。
艾尔发注塑机械手说明书

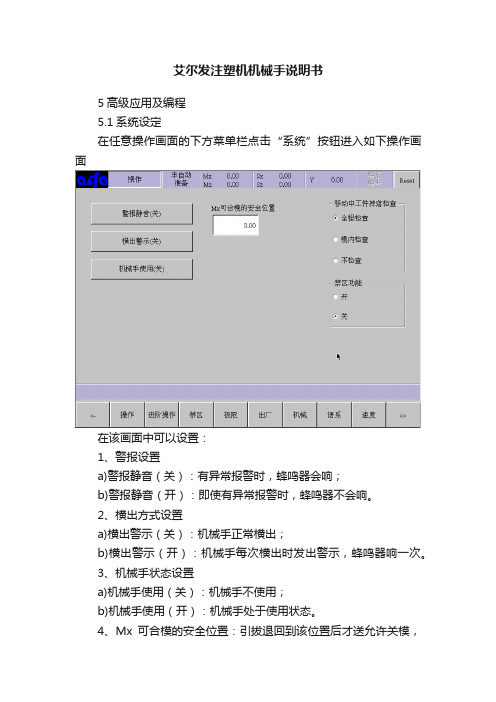
5高级应用及编程5.1系统设定在任意操作画面的下方菜单栏点击“系统”按钮进入如下操作画面在该画面中可以设置:1、警报设置a)警报静音(关):有异常报警时,蜂鸣器会响;b)警报静音(开):即使有异常报警时,蜂鸣器不会响。
2、横出方式设置a)横出警示(关):机械手正常横出;b)横出警示(开):机械手每次横出时发出警示,蜂鸣器响一次。
3、机械手状态设置a)机械手使用(关):机械手不使用;b)机械手使用(开):机械手处于使用状态。
4、Mx可合模的安全位置:引拔退回到该位置后才送允许关模,此功能是为防止类似有送模机的机台,关模时撞到机械手臂而设计的。
5、检知方式设定a)全程检知:机械手从开始取产品一直到产品放掉整个过程中都检测产品是否脱落,如果脱落则警报,机械手暂停。
b)模内检知:机械手只在从开始取物到其横出过安全门这段过程中对产品进行检测,如果产品脱落则警报;在安全门之外,不对产品进行检测。
c)不检知:机械手不检查是否取到产品。
6、禁区功能设置a)开:禁区中设置的参数有效,机械手运行必须在禁区参数设定范围内,否则警报。
b)关:禁区中设置的参数无效,其设置不影响机械手运行。
点击屏幕下方菜单栏中的按键“进阶操作”,进入下面页面1)全自动下可修改的距离范围机械手全自动运行时,能修改轴位置最大距离。
超过时给出提示。
2)机械手本体的IO延迟时间:侧姿,回正信号在O点动作过设定时间后没检到I点发警报。
3)横出轴的原点反相:若选中该项,则机械手归原点时Y轴会往Y+方向找原点。
4)使用模内下行待机功能:若选中该项,则需设置待机点坐标,每次循环都会先回到待机点位置。
5)安全门打开的处理方式a)安全门打开后立即停止:全自动运行时安全门打开后立即停止,后续不在执行,要重新启动运行。
b)安全门关闭后继续加工:全自动运行时安全门打开立即暂停,关门后机械手继续执行后面动作。
6)副臂使用方式:当勾选时,机械手具有相应机型的功能5轴副臂使用伺服;3轴副臂不使用;3轴副臂加汽缸。
艾尔发注塑机机械手说明书

4.维护篇4.1系统相关参数设定按键返回到下面操作键。
4.1.1操作设定按“系统”键进入下画页。
4.1.2禁区设定按“禁区”键进入下画页。
在此画面设定各轴禁区位置。
4.1.3极限设定按“极限”键进入下画页。
在此画面设定各轴最大最小值。
4.1.4出厂设定按“出厂”键进入下画页。
在此面可以看机械出厂前相关信息。
4.1.5语言切换按“语系”键进入文字切换。
4.1.6系统参数备份按“备份”键进入系统参数备份。
在主机USB接口插入U盘,选汇出到USB,选要汇出内容点击“开始传输”键,把数据传到U盘。
如下图所示:若U盘内有改好的Ladder,可以由USB汇入。
更改PLC后由此传到控制器。
4.1.7系统升级按键返回,再按“>>”键切换下一功能键,点击“升级”键。
在主机USB接口插入U盘,盘内有要升级的程序,点“确定”开始程序升级。
4.2系统维护在操作切换栏按“维护”键进入下面画页。
在此画面可以观看系统变量内的值,程序执行时是否按要求变化。
发生故障时查找原因。
按“I/OMap”键进入下面画页。
在DIMap,DOMap内offset位看I/O点实际对应硬件接线位置。
按键返回,再按“切换用户”键进入下面画页。
在此画页内更改操作权限。
10~19为机械厂使用权限。
20~29为编辑权限。
99为一般用户权限。
改变使用者等级输入密码"****"点击OK键后出现如下画页在此等级下,进入编辑,修改。
按键返回,再按“操作权限”键进入下面画页。
此画页设定不同画页采用不同使用权限。
按键返回,再按“变更密码”键进入下面画页。
用户根据要求设定新密码。
按键返回,再按“阶梯图”键进入下面画页。
通过此画页看程序运行,以及PLC输入输出等状态。
4.3教好程序备份在教导画页内按“档案”键进入下面画页。
在此画页按“汇入汇出”键进入下面画面。
在主机USB接口插入U盘,选汇出到USB,选要汇出内容点击“开始传输”键,把数据传到U盘。
艾尔发注塑机机械手说明手册
精心整理2.操作说明2.1开机启动程序流程1、检查气源是否接上;2、检查IMM联机是否接上;3、检查紧急停止是否正常;4、将总电源开关转向ON;5、将控制面板控制电源开关转向ON;6、再按下电源开关,系统电源自保ON;7、等后操作画面显示为系统正常后进入归原点画页:8、依划面显示指示,按Home键,系统开始归原点;9、若有异常发生(会碰撞机构),可按停止键立即停止动作后,需关电源并重新启动电源;10、归原点完成,表示系统已经正常,画面自动切至手动操。
2.2关机程序流程1、机器已停止各项操作后;2、将控制面板控制电源开关转向OFF;3、将总电源开关转向OFF;4、开启机器电源与关闭机器电源间隔不可过短,至少要一分钟以上时间,否则会减短控制系统寿命。
2.3IMM信号处理说明1、安全门信号:当IMM信号OFF则机器立即停止动作。
2、紧急停止信号:当紧急停止信号OFF则机器立即停止动作。
3、全自动信号:机器自动运转需配和IMM自动信号ON,若IMM自动信号由ON→OFF则机器运转动作完成后立即退出。
机器手动操作须将要IMM自动信号OFF否则机器无法手动操作。
2.4归原点动作说明在此画面可以调整归原点时速度,侧姿状态,先后循序。
正臂上下归完原点后侧姿执行侧姿还是回正由此选择。
键把归原点速度按不同比例降低键把归原点速度按不同比例升高。
选择归原点个轴先后循序。
正常情况下先MZ,SZ再Mx,Sx,最后Y轴。
归原点循序更改一定要注意各轴安全。
发现归原点如果与模具等有干涉,进入手动画页,操作到安全位置后再归原点。
开机后警报或警告处理完成,按此键。
机器正常,按此键归原点。
系统归原点中。
归完原点后切至手动画页。
2.5手动操作说明2.5.1画面按键介绍画页切换到顶页画页切换到上一页画页切换到下一页画页切换到末页选择O点输出ON选择O点输出OFF各轴寸动操作。
操作过程中碰到极限开关勾选“马达强制激磁”,按键,反方向操作轴寸动。
【一定要收藏】注塑机械手操作指南!
【一定要收藏】注塑机械手操作指南!
一、准备工作
确认电源及空压源等动力源都妥善接好,检查机械手空气调压阀压力至0.4mpa-0.6mpa
二、开机启动
打开机械手电源开关,进行机械手原点复归动作。
设定机械手的各动作模式,具体根据产品需求设置。
三、设定参数
根据机械手夹具上的标参数,输入机械手待机位置和夹取位置。
然后根据标贴上参数设定注塑机开模行程。
四、机器检查
检验夹具螺钉是否有松动,抱夹夹片是否有损坏,气缸伸缩是否正常,是否漏气,吸盘是否完好,金具是否有卡死等不良现象。
五、安装调试
夹具安装OK后,观察夹具所有金具是否在同一个垂直面上,若不在,则调整连接快上的阻挡螺钉使夹具处于同一垂直面上。
半自动微
调夹取位置,调整OK后,保存参数。
然后依次设定机械手的姿势位置,途中开放位置,产品开放位置等。
六、初步设定
进入机械手定时器模块,对各个动作时间进行初步设置。
并初步设定注塑机顶针顶出延时(2s)与后退延时(5s)。
进行注塑机及机械手的全自动运行操作
七、运行观察
请仔细观察全自动状态下两个设备的运行情况,然后微调机械手的各项时间与注塑机的各项时间(顶针顶出延时、顶针后退延时、中间循环时间等),以便机械手做到最迅速稳定的动作反应。
调整完毕,进行全自动生产。
观察20模或半小时以上且无故障报警后方可离开。
机械手操作指导书
文件名称
机械手操作指导书
生效日期
2006-8-24
文件编号
3-IN-002
页次
1/2
版本
1.0
文件制修訂記錄
NO
制/修訂日期
修訂編號
制/修訂內容
頁次
版本
制定
審核
核准
东莞瑞捷电子科技有限公司
文件名称
机械手操作指导书
生效日期
2006-8-24
文件Байду номын сангаас号
3-IN-002
页次
2/2
版本
4.注意事项:
4.1气压表的气压一定要在4kg-8kg之间。
4.2机械手臂下降后,不能作回旋动作。
4.3注塑机开模未完成,机械手臂不能作下降动作。
4.4 可打开注塑机安全门关警报,处理完警报,关上安全门即可自动生产。
5.相关/支持文件:无
6.使用表单:
6.1 <<机械手定期保养表>>
6.2 <<机械手每日保养表>>
1.0
1.目的:
为了让技术人员了解机器,正确的操作,确保操作安全和产品的品质.
2.范围:
本部门所有技术人员.
3.作业内容:
3.1 先接好气管,让机械手气压表的气压在4kg-8kg之间。
3.2 打开机械手电源开关,并在注塑机控制板上打开机械手功能键。
3.3注塑机开模完成后,先手动放下机械手臂,并调节好手臂下降的位置。
6.3 <<机器维修履历表>>
6.4 <<机器设备维修单>>
6.附件:无
3.4 按“手动”键,即可进入手动操作画面,依所须动作,先按“选择”键,再按“动作”键,依次调节好各动作的延时时间。
艾尔发注塑机机械手说明书
艾尔发注塑机机械手说明书5高级应用及编程5.1系统设定在任意操作画面的下方菜单栏点击“系统”按钮进入如下操作画面在该画面中可以设置:1、警报设置a)警报静音(关):有异常报警时,蜂鸣器会响;b)警报静音(开):即使有异常报警时,蜂鸣器不会响。
2、横出方式设置a)横出警示(关):机械手正常横出;b)横出警示(开):机械手每次横出时发出警示,蜂鸣器响一次。
3、机械手状态设置a)机械手使用(关):机械手不使用;b)机械手使用(开):机械手处于使用状态。
4、Mx可合模的安全位置:引拔退回到该位置后才送允许关模,此功能是为防止类似有送模机的机台,关模时撞到机械手臂而设计的。
5、检知方式设定a)全程检知:机械手从开始取产品一直到产品放掉整个过程中都检测产品是否脱落,如果脱落则警报,机械手暂停。
b)模内检知:机械手只在从开始取物到其横出过安全门这段过程中对产品进行检测,如果产品脱落则警报;在安全门之外,不对产品进行检测。
c)不检知:机械手不检查是否取到产品。
6、禁区功能设置a)开:禁区中设置的参数有效,机械手运行必须在禁区参数设定范围内,否则警报。
b)关:禁区中设置的参数无效,其设置不影响机械手运行。
点击屏幕下方菜单栏中的按键“进阶操作”,进入下面页面1)全自动下可修改的距离范围机械手全自动运行时,能修改轴位置最大距离。
超过时给出提示。
2)机械手本体的IO延迟时间:侧姿,回正信号在O点动作过设定时间后没检到I点发警报。
3)横出轴的原点反相:若选中该项,则机械手归原点时Y轴会往Y+方向找原点。
4)使用模内下行待机功能:若选中该项,则需设置待机点坐标,每次循环都会先回到待机点位置。
5)安全门打开的处理方式a)安全门打开后立即停止:全自动运行时安全门打开后立即停止,后续不在执行,要重新启动运行。
b)安全门关闭后继续加工:全自动运行时安全门打开立即暂停,关门后机械手继续执行后面动作。
6)副臂使用方式:当勾选时,机械手具有相应机型的功能5轴副臂使用伺服;3轴副臂不使用;3轴副臂加汽缸。
注塑机操作说明

注塑机操作说明开当挑选开时,在运行时运行位子不在禁地范围内时,会发布警报。
(主动运行时定然要开2.操纵阐明2.1 开机启用过程流程1、检验气源是否接上;2、检验IMM联机是否接上;3、检验紧迫停顿是否正常;4、将总电源开关转向ON;5、将克制面板克制电源开关转向ON;6、再按下电源开关,体系电源自保ON;7、等后操纵画面显现为体系正常后进去归原点画页:8、依划面显现指示,按 Home 键,体系开端归原点;9、若有异样产生(会冲撞机构),可按停顿键马上停顿动作后,需关电源并从头启用电源;10、归原点实现,表示体系曾经正常,画面主动切至手动操。
2.2 关机过程流程1、机器已停顿各项操纵后;2、将克制面板克制电源开关转向OFF;3、将总电源开关转向OFF;4、开启机器电源与倒闭机器电源间隔不可过短,起码要一分钟以上光阴,不然会减短克制体系寿命。
2.3 IMM信号料理阐明1、平安门信号:当IMM信号OFF则机器马上停顿动作。
2、紧迫停顿信号:当紧迫停顿信号OFF则机器马上停顿动作。
3、全主动信号:机器主动运转需配和IMM主动信号ON,若IMM主动信号由ON→OFF则机器运转动作实现后马上退出。
机器手动操纵须即将IMM主动信号OFF不然机器无法手动操纵。
2.4归原点动作阐明在此画面能够调剂归原点时速度,侧姿形势,前后循序。
正臂上下归完原点后侧姿实行侧姿还是回正由此挑选。
键把归原点速度按不同比例减低键把归原点速度按不同比例提高。
挑选归原点个轴前后循序。
正常理况下先MZ,SZ再Mx,Sx,末尾Y轴。
归原点循序改动定然要留神各轴平安。
发觉归原点假使与模具等有介入,进动手动画页,操纵到平安位子后再归原点。
开机后警报或告诫料理实现,按此键。
机器正常,按此键归原点。
体系归原点中。
归完原点后切至手动画页。
2.5手动操纵阐明2.5.1画面按键引荐画页切换到顶页画页切换到上一页画页切换到下一页画页切换到末页挑选O点输出ON挑选O点输出OFF各轴寸动操纵。
注塑机机械手说明书

注塑机机械手说明书3、编程3 程序编辑3.1命令说明开机正常后进入归原点画页没有任何警报,按键归原点,归原点正常后进入下面画页按键返回至如下按键3-1 File:CNC4-3C3、编程按“教导”键进入编辑画页。
3.1.1编辑器说明删除一行程序创建一个新程序剪下一行程序复制一行程序贴上复制一行程序或剪下一行程序。
光标移到下一行换到下一页换到最下一页换到最上一页光标移到上一行换到上一页把程序内容显示扩大3-2 File:CNC4-3C3、编程编辑各功能键说明3.1.2教导指令1)直线(轴直线运动操作)按键进入各轴直线运动操作。
轴操作有两种方式,第一、直接通过数字键盘输入各轴位置;第二、通过右边各轴寸动键操作到所需位置,按左边“MX”等一个键把当前位置设到对画框内。
如果要全部设入,按键。
当通过数字键盘输入各轴位置时,一定要注意所设定值是否安全。
3-3 File:CNC4-3C3、编程2) 速度按键进入速度设定。
3) 计时按键进入延时功能设定。
3-4 File:CNC4-3C3、编程4)一般I/O按键进入侧姿回正等选择。
5) 成型I/O按键进入成型相关条件设定。
3-5 File:CNC4-3C3、编程6) 治具I/O按键进入治具相关功能设定。
7) 周边I/O按键进入周边相关功能设定。
3-6 File:CNC4-3C3、编程8) 回圈按键进入循环功能设定。
9) 跳跃按键进入跳转功能设定。
3-7 File:CNC4-3C3、编程10) 停止按键进入程序完成设定。
11) 宏按键进入调用已经编好的子程序。
编号为0~99共100个。
3-8 File:CNC4-3C3、编程12)堆叠按键进入装箱取物功能设定。
编号为0~3共4个。
13)运算按键进入相关功能设定。
此功能在高阶编程内做详细说明。
为变数。
3-9 File:CNC4-3C3、编程3.1.3编辑新程序1)程序保存归完原点后进入如下操作页面点击按钮,屏幕下方显示如下菜单单击,进入教导画面3-10 File:CNC4-3C3、编程点击档案按钮进入如下画面按钮,切换到如下画面在此页点击3-11 File:CNC4-3C3、编程点击模具编号空白框,弹出输入键盘如下输入模具编号,点击,再点击保存按钮。
新睿机械手说明书

前言非常感谢您购买xx机器人的机械手。
本机械手通过与注塑机的配合,以取出注塑机所加工的塑料产品,实现自动化生产作业。
此手册涉及机器的安全、安装、操作和维修保养等信息。
在操作之前请仔细阅读此说明书,相信如果能在熟读此操作说明书后进行正确操作,一定能够满足您的要求。
当您购买此机器后,请检查其型号、所有装箱单上所列零件,并检查运输过程中是否有任何部件受损。
如有任何部件遗漏或发现受损,请立即联系当地经销商或本公司。
我们再次感谢您的购买。
今后,本公司将继续努力进行技术开发、提高服务质量,制造出使您更满足的机械手。
免责事项●本手册的内容,将来可能更改,恕不预先通知。
●本手册内容的编写纰漏之处,在所难免,尚请不吝指正。
●本手册所载各种数据,系作本机的参考数据,并不负法律上的责任。
●由于顾客方面的改造、拆卸、误用、以及设备环境欠妥等本公司不能掌握的状况而造成损害时,本公司恕不负责。
目录五、控制器操作说明 (1)5.1手控器面板按键位置图 (1)5.2按键功能说明 (1)5.3操作说明 (2)5.3.1密码功能 (2)5.3.2中英文切换 (2)5.3.3手动操作说明 (3)5.3.4自动操作说明 (3)5.3.5错误报警 (4)5.3.6功能设置 (4)5.3.7教导说明 (7)5.3.8时间设置 (8)5.3.9 I/O监视说明 (8)5.4 标准动作程序 (9)5.5双臂动作程式 (11)六、故障说明 (13)6.1故障的编号及解释 (13)6.2故障说明及排除方法 (13)七、电气部分 (20)7.1电控系统安全规则 (20)7.2端口定义及接线说明 (21)7.2.1 36P线接线端口定义说明 (21)7.2.2中继板端口示意图 (22)7.2.3注塑机与机械手连接图 (23)7.2.4安装尺寸图 (24)7.2.5开关电源与中继板连接图 (25)五、控制器操作说明5.1手控器面板按键位置图5.2按键功能说明1数字键1/手臂上升/下降动作, 再按一次,则反相动作。
注塑机机械手说明书
3 程序编辑3.1命令说明开机正常后进入归原点画页没有任何警报,按键归原点,归原点正常后进入下面画页按键返回至如下按键按“教导”键进入编辑画页。
删除一行程序创建一个新程序剪下一行程序复制一行程序贴上复制一行程序或剪下一行程序。
光标移到下一行换到下一页换到最下一页换到最上一页光标移到上一行换到上一页把程序内容显示扩大编辑各功能键说明1)直线(轴直线运动操作)按键进入各轴直线运动操作。
轴操作有两种方式,第一、直接通过数字键盘输入各轴位置;第二、通过右边各轴寸动键操作到所需位置,按左边“MX”等一个键把当前位置设到对画框内。
如果要全部设入,按键。
当通过数字键盘输入各轴位置时,一定要注意所设定值是否安全。
2)速度按键进入速度设定。
3)计时按键进入延时功能设定。
4)一般I/O按键进入侧姿回正等选择。
5)成型I/O按键进入成型相关条件设定。
6)治具I/O按键进入治具相关功能设定。
7)周边I/O按键进入周边相关功能设定。
8)回圈按键进入循环功能设定。
9)跳跃按键进入跳转功能设定。
10) 停止按键进入程序完成设定。
11)宏按键进入调用已经编好的子程序。
编号为0~99共100个。
12)堆叠按键进入装箱取物功能设定。
编号为0~3共4个。
13)运算按键进入相关功能设定。
此功能在高阶编程内做详细说明。
为变数。
1)程序保存归完原点后进入如下操作页面点击按钮,屏幕下方显示如下菜单单击,进入教导画面点击档案按钮进入如下画面在此页点击按钮,切换到如下画面点击模具编号空白框,弹出输入键盘如下输入模具编号,点击,再点击保存按钮。
在此画面中可以根据模具产品功能需要,编辑各式程序。
下面进入正式教导阶段:2)速度按键进入如下画面点击空白框,弹出输入键盘,输入速度值,点击,输入完毕,返回以上画面,点击,进入如下画面此速度为在下一速度设定前直线运动时各轴的运动速度,如果以下程序中没有再设定其它速度,整个程序中轴运动都以此速度运行。
2)轴操作到待机位置按键进入各轴直线运动操作,如下图所示。
艾尔发注塑机机械手说明手册
精心整理2.操作说明2.1开机启动程序流程1、检查气源是否接上;2、检查IMM联机是否接上;3、检查紧急停止是否正常;4、将总电源开关转向ON;5、将控制面板控制电源开关转向ON;6、再按下电源开关,系统电源自保ON;7、等后操作画面显示为系统正常后进入归原点画页:8、依划面显示指示,按Home键,系统开始归原点;9、若有异常发生(会碰撞机构),可按停止键立即停止动作后,需关电源并重新启动电源;10、归原点完成,表示系统已经正常,画面自动切至手动操。
2.2关机程序流程1、机器已停止各项操作后;2、将控制面板控制电源开关转向OFF;3、将总电源开关转向OFF;4、开启机器电源与关闭机器电源间隔不可过短,至少要一分钟以上时间,否则会减短控制系统寿命。
2.3IMM信号处理说明1、安全门信号:当IMM信号OFF则机器立即停止动作。
2、紧急停止信号:当紧急停止信号OFF则机器立即停止动作。
3、全自动信号:机器自动运转需配和IMM自动信号ON,若IMM自动信号由ON→OFF则机器运转动作完成后立即退出。
机器手动操作须将要IMM自动信号OFF否则机器无法手动操作。
2.4归原点动作说明在此画面可以调整归原点时速度,侧姿状态,先后循序。
正臂上下归完原点后侧姿执行侧姿还是回正由此选择。
键把归原点速度按不同比例降低键把归原点速度按不同比例升高。
选择归原点个轴先后循序。
正常情况下先MZ,SZ再Mx,Sx,最后Y轴。
归原点循序更改一定要注意各轴安全。
发现归原点如果与模具等有干涉,进入手动画页,操作到安全位置后再归原点。
开机后警报或警告处理完成,按此键。
机器正常,按此键归原点。
系统归原点中。
归完原点后切至手动画页。
2.5手动操作说明2.5.1画面按键介绍画页切换到顶页画页切换到上一页画页切换到下一页画页切换到末页选择O点输出ON选择O点输出OFF各轴寸动操作。
操作过程中碰到极限开关勾选“马达强制激磁”,按键,反方向操作轴寸动。
伟力机械手操作指导书22
长春富维梅克朗汽车镜有限公司【设备操作规程】P12-S -03-14版次:A/0
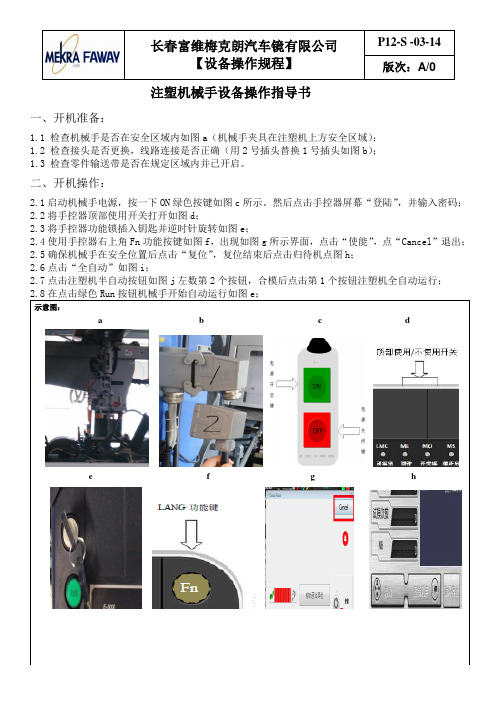
注塑机械手设备操作指导书
一、开机准备:
1.1 检查机械手是否在安全区域内如图a(机械手夹具在注塑机上方安全区域);
1.2 检查接头是否更换,线路连接是否正确(用2号插头替换1号插头如图b);
1.3 检查零件输送带是否在规定区域内并已开启。
二、开机操作:
2.1启动机械手电源,按一下ON绿色按键如图c所示。
然后点击手控器屏幕“登陆”,并输入密码;
2.2将手控器顶部使用开关打开如图d;
2.3将手控器功能锁插入钥匙并逆时针旋转如图e;
2.4使用手控器右上角Fn功能按键如图f,出现如图g所示界面,点击“使能”,点“Cancel”退出;
2.5确保机械手在安全位置后点击“复位”,复位结束后点击归待机点图h;
2.6点击“全自动”如图i;
2.7点击注塑机半自动按钮如图j左数第2个按钮,合模后点击第1个按钮注塑机全自动运行;
2.8在点击绿色Run按钮机械手开始自动运行如图e;
示意图:
a b c d
e f g h
i j
三、停机操作:
3.1 短暂停机,触控“循环停止”如图f,选择“是”,此时完成此次动作后,注塑机不再合模。
切记将注塑机切换成手动模式。
3.2 长时间停机,触控“循环停止”如图f,选择“是”,当机械手完成此次动作后切断电源,更换欧规接头。
审批:审核:编制:。
注塑机机械手安全操作及日常维护规程
航天机械手SHNM3/5系列安全操作及日常维护规程1.0目的:熟练进行规范化操作,确保人员及设备的安全。
2.0适用范围:航天SHNM3/5机械手的安全操作及日常维护。
3.0职责:3.1设备使用车间:负责严格按照文件规定进行操作及日常维护,辅助维修员进行设备维修保养工作。
3.2设备管理部:负责监督检查使用部门的设备使用情况,并组织实施设备维修及维护保养。
4.0工作程序:4.1开机前检查:4.1.1确认短路航插接头已拔下(图1),电源开关打开(图2)。
4.1.2检查确认气阀已经打开(图3)4.1.3在启动机械手之前,确认机械手可动范围内没有人员,且没有障碍物。
4.1.4检查确认注塑机已打开机械手使用功能。
4.2 安全操作:在4.1项所有检查均无异常时方可进行如下操作。
4.2.1航天机械手电控系统布局图,操作使用流程图(见图4、图5)5.0操作注意事项:5.1机械手运转中,人不可站在机械手落下或动作的范围内,不可把手或其它的物体伸入机械手动作的安全范围内。
5.2在生产中机械手运转发生异常,如有异常响声或滑动不顺应立即停止,及时通知相关负责人。
5.3在不使用机械手时,必须把机械手臂置于安全位置,以防机器震动时手臂落下而损坏。
5.4操作时,请勿以沾满油污或潮湿的手触摸操作键盘,以防损坏键盘或造成电击事故。
5.5操作人员必须经过本操作规程培训后方可上岗。
图2图1图3图46.0日常维护:6.1清洁机台环境和工作环境,要求设备表面无灰尘,无油污,周围无杂物。
6.2 检查吸盘或夹具,各气管无漏气现象。
(见图6)6.3检查清理滑轨槽内油污及灰尘。
(见图7)6.4检查确认工作时灵活无卡滞,无异常声响振动,如出现异常情况,及时通知相关负责人。
7.0相关文件、记录:7.1《航天机械手日常点检表》图7图6。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
注塑机机械手说明书3、编程3 程序编辑3.1命令说明开机正常后进入归原点画页没有任何警报,按键归原点,归原点正常后进入下面画页按键返回至如下按键3-1 File:CNC4-3C3、编程按“教导”键进入编辑画页。
3.1.1编辑器说明删除一行程序创建一个新程序剪下一行程序复制一行程序贴上复制一行程序或剪下一行程序。
光标移到下一行换到下一页换到最下一页换到最上一页光标移到上一行换到上一页把程序内容显示扩大3-2 File:CNC4-3C3、编程编辑各功能键说明3.1.2教导指令1)直线(轴直线运动操作)按键进入各轴直线运动操作。
轴操作有两种方式,第一、直接通过数字键盘输入各轴位置;第二、通过右边各轴寸动键操作到所需位置,按左边“MX”等一个键把当前位置设到对画框内。
如果要全部设入,按键。
当通过数字键盘输入各轴位置时,一定要注意所设定值是否安全。
3-3 File:CNC4-3C3、编程2) 速度按键进入速度设定。
3) 计时按键进入延时功能设定。
3-4 File:CNC4-3C3、编程4)一般I/O按键进入侧姿回正等选择。
5) 成型I/O按键进入成型相关条件设定。
3-5 File:CNC4-3C3、编程6) 治具I/O按键进入治具相关功能设定。
7) 周边I/O按键进入周边相关功能设定。
3-6 File:CNC4-3C3、编程8) 回圈按键进入循环功能设定。
9) 跳跃按键进入跳转功能设定。
3-7 File:CNC4-3C3、编程10) 停止按键进入程序完成设定。
11) 宏按键进入调用已经编好的子程序。
编号为0~99共100个。
3-8 File:CNC4-3C3、编程12)堆叠按键进入装箱取物功能设定。
编号为0~3共4个。
13)运算按键进入相关功能设定。
此功能在高阶编程内做详细说明。
为变数。
3-9 File:CNC4-3C3、编程3.1.3编辑新程序1)程序保存归完原点后进入如下操作页面点击按钮,屏幕下方显示如下菜单单击,进入教导画面3-10 File:CNC4-3C3、编程点击档案按钮进入如下画面按钮,切换到如下画面在此页点击3-11 File:CNC4-3C3、编程点击模具编号空白框,弹出输入键盘如下输入模具编号,点击,再点击保存按钮。
在此画面中可以根据模具产品功能需要,编辑各式程序。
下面进入正式教导阶段:2) 速度按键进入如下画面3-12 File:CNC4-3C3、编程点击空白框,弹出输入键盘,输入速度值,点击,输入完毕,返回以上画面,点击,进入如下画面此速度为在下一速度设定前直线运动时各轴的运动速度,如果以下程序中没有再设定其它速度,整个程序中轴运动都以此速度运行。
2)轴操作到待机位置按键进入各轴直线运动操作,如下图所示。
此页的按钮如等可以移动相应的轴,在编程时无须进入手动操作画面,通过这些按钮就可以很方便的将相应的轴移动到目标位置,配合中的“Mx”等相应按钮将相应轴的当前坐标设入坐标框中,如须将当前坐标全部设入,请按或者直接输入各轴坐标,如果需要某一个轴移动或者一个以上轴移动时,不需要移动的轴的坐标设为空白,例如移动Mz,Sz轴到坐标零位置,其它轴不动,在和中输入坐标0,其它的为空白。
3-13 File:CNC4-3C3、编程按键,命令添加到编辑栏中,画面显示如下。
3-14 File:CNC4-3C3、编程将Mx轴移动到-300mm,Sx移动到85mm,按照上面操作将坐标输入坐标框中,注意:负数输入是先将数值输入,然后按减号键将负号输入,点击即可。
画面显示如下:4)一般IO主臂回正按键进入如下画面,根据需要选择不同选项,如:主臂旋转气缸1,选中OFF(即回正),在中选中“检知”,如果选中“不检知”则不检测是否回正到位,就进行下一步动作。
3-15 File:CNC4-3C3、编程按键将命令添加到编辑栏,画页显示如下。
5)等候开模按键进入设定等候开模信号。
3-16 File:CNC4-3C3、编程按键进入下面画页。
6)操作Z轴下行到模内按键进入各轴直线运动操作。
3-17 File:CNC4-3C3、编程按键进入下面画页。
7)操作X轴到取产品位置按键进入各轴直线运动操作。
3-18 File:CNC4-3C3、编程按键进入下面画页。
8)治具开始吸产品按键进入治具功能设定,选择相应选项,如当前页没有显示,请按或按钮进行翻页查找;点击或分别为所选功能为ON或OFF;选中中的“检知”,表示如果没有夹到或者没有吸到产品或者检知信号失落都会有相应的报警,机械手会立即暂停,待安全门开合一次后机械手才会继续运行完剩余的程序步骤;中的延迟时间为报警延迟时间即在有夹或吸动作在所设时间之后如果没有检测到相应的检知信号,就会报警。
例如选择主臂吸1ON,检知,0.5秒后如果没有吸检知信号就报警。
显示如下图3-19 File:CNC4-3C 3、编程按键进入下面画页。
9)治具开始夹料头按键进入治具功能设定,夹功能设置与上述吸功能设定相类似。
3-20 File:CNC4-3C3、编程按键进入下面画页。
按进入动作延时,显示如下图。
在中设置延时时间,该时间为当程序运行到该步时程序在此停留0.5秒后再执行该程序步以下的程序。
例如设置为0.5秒时显示如下:3-21 File:CNC4-3C3、编程点击按钮,将延时命令添加到编辑栏中。
10)操作X轴后退位置按键进入各轴直线运动操作。
3-22 File:CNC4-3C3、编程按键进入下面画页。
9)操作Z轴回到模具上方安全位置按键进入各轴直线运动操作。
3-23 File:CNC4-3C3、编程按键进入下面画页。
10)允许关模按键进入设定允许关模,允许关模信号必须要在手臂上行到上位位置或在模外时才能送允关,否则如果手臂不在上位位置,即使程序中已写入了允关命令都不会有允关信号输出。
3-24 File:CNC4-3C3、编程按键进入下面画页。
11)一般IO侧姿按键进入主臂旋转气缸1ON(即侧姿)3-25 File:CNC4-3C3、编程按键进入下面画页。
12)操作Y轴横出放料头按键进入各轴直线运动操作。
3-26 File:CNC4-3C3、编程按键进入下面画页。
13)放料头按键进入治具功能设定,例如选中副臂夹具1,选择右边的OFF,选中的“不检知”,显示如下。
3-27 File:CNC4-3C3、编程按键进入下面画页。
14)操作Y轴到放成品位置按键进入各轴直线运动操作。
3-28 File:CNC4-3C3、编程按键进入下面画页。
15)操作轴到放产品位置按键进入各轴直线运动操作。
3-29 File:CNC4-3C3、编程按键进入下面画页。
16)放产品按键进入治具功能设定。
例如选中正臂吸1,选择右边的OFF,选中的“不检知”,显示如下。
3-30 File:CNC4-3C3、编程按键进入下面画页。
17)放产品后延时按键进入延时设定。
3-31 File:CNC4-3C3、编程按键进入下面画页。
18)操作Z轴上行按键进入各轴直线运动操作。
3-32 File:CNC4-3C3、编程按键进入下面画页。
19)操作轴回模内待机位置按键进入各轴直线运动操作。
3-33 File:CNC4-3C3、编程按键进入下面画页。
20)教导程序完成按键设定相关功能。
每个程序教导完毕必须在程序结尾加上该命令,如果是主程序就选中“程式结束”,如果是巨集程序就选中副程式结束。
3-34 File:CNC4-3C3、编程按键进入下面画页。
教导完成按键储存数据。
3.1.4 编好新程序试运行在试运行之前按“+”“-”键把运行速度调小,慢速运行。
3-35 File:CNC4-3C3、编程,按键机械手运行一个循环。
勾选单步时按键一次程序往下若没有勾选单步运行一步。
如下图:3.1.5程序内容编修3.1.5.1插入一步新程序把光标移到插入行号上方,如插入副臂治具1,按键进入治具功能设定3-36 File:CNC4-3C3、编程按键将“副臂治具1 开”命令插入“主臂治具1 开”下面进入如下画页。
把光标移到插入行号上方,如插入轴位置,按键进入治具功能设定3-37 File:CNC4-3C3、编程按键将命令“直线移动到 Y轴1200.00”插入“允许关模”下方,进入如下画页。
3.1.5.2删除一步程序把光标移到要删除的程序步,如下图所示。
3-38 File:CNC4-3C3、编程按键把上画面中光标处内容删除后如下画面。
3.1.5.3重新编辑一个新程序在下画面中按键出现提示画面3-39 File:CNC4-3C3、编程点击“Yes”键出现下面画页。
重新输入模具编号,见下图。
开始编程。
编辑方法见前面3.2节。
点击剪切按钮可以将光标所在的行的命令剪切掉,而点击复制按钮可以将光标所在的行的命令复制,点击粘贴按钮可以将剪切或复制的内容粘贴到光标所在行的下一行。
注意:剪切、复制只能单行进行操作不能对多行或整个程序进行操作。
3-40 File:CNC4-3C3、编程3.1.6 档案编辑3.1.6.1 程序载入在编辑画页按“档案”键进入下面画页。
在此画页,把光标移到你所需要的程序的程序名上,点击“载入”键出现以下对话框。
3-41 File:CNC4-3C3、编程程序,如下图。
在此画页点击“确定”键载入你需要的在此画面可以进行单步或单循环试运行。
如要进行全自动运行,请点击翻页按钮使屏幕下方的菜单栏显示为:点击自动按钮进入自动运行页面进行自动运行。
3.1.6.2 复制档案把光标移到所要复制的文件名上,点击“复制”键出现如下图,输入目的档名。
3-42 File:CNC4-3C3、编程3.1.6.3 删除档案把光标移到要删除文件名处,点击“删除”键出现如下画页。
确定要删除时按“确定”键删除此文件。
3.1.6.4 汇入汇出在档案页点击屏幕下方的按钮,进入程序汇入汇出画面。
如果欲将U盘的程序拷贝到ROBOT系统中,请勾选,然后点击屏幕下方菜单中的按钮,等待传输完毕即可。
3-43 File:CNC4-3C3、编程欲将ROBOT系统中的资料备份,勾选,在编辑栏中选中所要备份的资料名,然后点击屏幕下方菜单中的按钮,等待传输完毕即可。
3.1.7堆叠功能设定教导程式内如有堆叠指令,按“堆叠设定”键进入下画页选择使用堆叠编号,设定下面相关参数:1、安全位置:移到此安全位置后,执行堆叠动作。
2、第一个工件位置:进行堆叠动作时取或放第一个产品的位置。
3、手臂选择:堆叠时使用哪个手臂。
4、Z轴结束位置:a)记录点为手臂每次放完产品后Z轴上升到开始下行堆叠时的位置。
3-44 File:CNC4-3C3、编程b)安全点为放产品后Z轴上升到安全位置。
c)R点为手臂每次放完产品后Z轴上升到放产品前开始慢速下行的位置,该位置须在设置R点距离(即堆叠放产品时第一个产品的位置到开始减速时的垂直距离)。