自动控制原理考试试题第五章习题及答案-2
自动控制原理考试试题第五章习题及答案
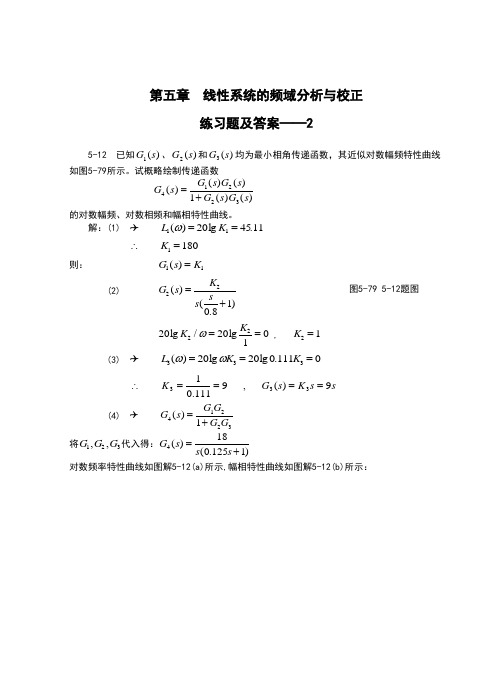
第五章 线性系统的频域分析与校正练习题及答案——25-12 已知)(1s G 、)(2s G 和)(3s G 均为最小相角传递函数,其近似对数幅频特性曲线如图5-79所示。
试概略绘制传递函数 G s G s G s G s G s 412231()()()()()=+的对数幅频、对数相频和幅相特性曲线。
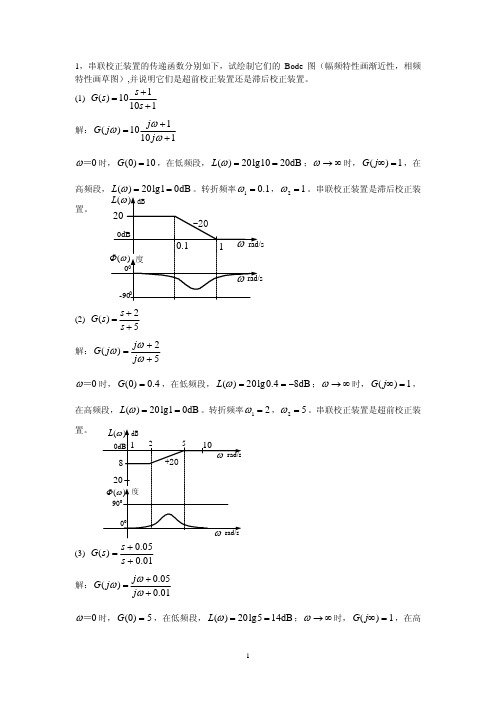
解:(1) ✈L K 11204511()lg .ω== ∴=K 1180则: G s K 11()=(2) G s K s s 22081()(.)=+20201022lg /lg K K ω== , K 21= (3) ✈L K K 333202001110()lg lg .ωω===s s K s G K 9)(,9111.01333====∴(4) ✈G s G G G G 412231()=+ 将G G G 123,,代入得:G s s s 41801251()(.)=+对数频率特性曲线如图解5-12(a)所示,幅相特性曲线如图解5-12(b)所示:图解5-12 (a) Bode图 (b) Nyquist图5-13 试根据奈氏判据,判断题5-80图(1)~(10)所示曲线对应闭环系统的稳定性。
已知曲线(1)~(10)对应的开环传递函数如下(按自左至右顺序)。
题号开环传递函数P N NPZ2-=闭环稳定性备注1G sKT s T s T s()()()()=+++1231110-12不稳定2G sKs T s T s()()()=++1211000稳定3G sKs Ts()()=+210-12不稳定4 G s K T s s T s T T ()()()()=++>12212110 0 0 稳定 5 G s K s ()=30 -1 2 不稳定 6 G s K T s T s s ()()()=++123110 0 0 稳定 7 G s K T s T s s T s T s T s T s ()()()()()()()=++++++5612341111110 0 0 稳定 8 G s KT s K ()()=->1111 1/2 0 稳定 9 G s KT s K ()()=-<1111 0 1 不稳定 10G s Ks Ts ()()=-11-1/22不稳定5-14 已知系统开环传递函数,试根据奈氏判据,确定其闭环稳定的条件:)1)(1()(++=s Ts s Ks G ; )0,(>T K(1)2=T 时,K 值的范围; (2)10=K 时,T 值的范围; (3)T K ,值的范围。
自控原理第五章习题参考答案

5-1 5()0.251G s s =+5()0.251G j j ωω=+()A ω=()arctan(0.25)ϕωω=-输入 ()5cos(430)5sin(460) =4r t t t ω=-︒=+︒(4)A ==(4)arctan(0.25*4)45ϕ=-=-︒系统的稳态输出为()(4)*5cos[430(4)]3045)17.68cos(475)17.68sin(415)c t A t t t t ϕ=-︒+=-︒-︒=-︒=+︒ sin cos(90)cos(90)cos(270)αααα=︒-=-︒=+︒或者,()(4)*5sin[460(4)]6045) 17.68sin(415)c t A t t t ϕ=+︒+=+︒-︒=+︒所以,对于cos 信号输入下的稳态输出计算规律与sin 信号作用下计算相同。
5-3(2)1()(1)(12)G s s s =++ 1()(1)(12)G j j j ωωω=++()A ω=()arctan arctan 2ϕωωω=--起点:0ω= (0)1;(0)0A ϕ==︒ 位于正实轴上。
终点:ω→∞ ()0;()180A ϕ∞=∞=-︒+∆ 从第三象限趋于原点因此,,Nyquist 曲线与虚轴有交点,并且满足:()arctan arctan 290ϕωωω=--=-︒ arctan arctan 290ωω+=︒所以有,1/(2)ωω= 21/2ω=()0.473A ω=== 因此,与虚轴的交点为(0,-j0.47)()ω(3)1()(1)(12)G s s s s =++ 1()(1)(12)G j j j j ωωωω=++()A ω=()90arctan arctan 2ϕωωω=-︒--起点:0ω= (0);(0)90A ϕ=∞=︒∆-- 位于负虚轴(左侧)无穷远方向终点:ω→∞ ()0;()270A ϕ∞=∞=-︒+∆ 从第二象限趋于原点因此,,Nyquist 曲线与实轴有交点,并且满足:()90arctan arctan 2180ϕωωω=-︒--=-︒ arctan arctan 290ωω+=︒1/(2)ωω= 21/2ω=2()0.673A ω===与实轴的交点为(-0.67,-j0))ω(4)21()(1)(12)G s s s s =++ 21()()(1)(12)G j j j j ωωωω=++()A ω=()180arctan arctan 2ϕωωω=-︒--起点:0ω= (0);(0)180A ϕ=∞=︒∆-- 位于负实轴(上侧)无穷远方向终点:ω→∞ ()0;()360A ϕ∞=∞=-︒+∆ 从第一象限趋于原点因此,,Nyquist 曲线与虚轴有交点,并且满足:()180arctan arctan 2270ϕωωω=-︒--=-︒ arctan arctan 290ωω+=︒1/(2)ωω= 21/2ω=()0.94A ω===与虚轴的交点为(0,j0.94))ω=5-4(2)10.5ω=,21ω=,1K =,0ν=(3)10.5ω=,21ω=,1K =,1ν=低频段直线(延长线)与0db 线交点的频率为:1/cK νω'=。
《自动控制原理》课后习题章节测试满分答案
绪论单元测试1【判断题】(100 分)自动控制理论经历了经典控制理论、现代控制理论和近代控制理论三个发展阶段。
A.错B.对第一章测试1【单选题】(10 分)下列系统中属于开环控制的为()。
A.家用空调器B.普通车床C.无人驾驶车D.自动跟踪雷达2【单选题】(10 分)下列系统属于闭环控制系统的为()。
A.家用电冰箱B.传统交通红绿灯控制C.自动流水线D.普通车床3【单选题】(10 分)下列系统属于定值控制系统的为()。
A.自动跟踪雷达B.自动化流水线C.家用空调D.家用微波炉4【单选题】(10 分)下列系统属于随动控制系统的为()。
A.火炮自动跟踪系统B.家用空调器C.自动化流水线D.家用电冰箱5【单选题】(10 分)下列系统属于程序控制系统的为()。
A.传统交通红绿灯控制B.火炮自动跟踪系统C.家用空调器D.普通车床6【单选题】(10 分)()为按照系统给定值信号特点定义的控制系统。
A.连续控制系统B.离散控制系统C.线性控制系统D.随动控制系统7【单选题】(10 分)下列不是对自动控制系统性能的基本要求的是()。
A.准确性B.快速性C.稳定性D.复现性8【单选题】(10 分)下列不是自动控制系统基本方式的是()。
A.开环控制B.复合控制C.闭环控制D.前馈控制9【单选题】(10 分)下列不是自动控制系统的基本组成环节的是()。
A.测量变送器B.控制器C.被控变量D.被控对象10【单选题】(10 分)自动控制系统不稳定的过度过程是()。
A.发散振荡过程B.其余选择都不是C.单调过程D.衰减振荡过程第二章测试1【单选题】(10 分)自动控制系统的数学模型为()。
A.热学方程B.梅森公式C.微分方程、传递函数、动态结构框图、信号流图D.状态方程、差分方程2【单选题】(10 分)以下关于传递函数的描述,的是()。
A.传递函数取决于系统和元件的结构和参数,并与外作用及初始条件有关B.传递函数是一种动态数学模型C.传递函数是复变量的有理真分式函数D.一定的传递函数有一定的零极点分布图与之相对应3【单选题】(10 分)系统的传递函数是由系统的()决定的。
自动控制原理第五章课后答案

五 频域分析法2-5-1 系统单位阶跃输入下的输出)0(8.08.11)(94≥+-=--t e e t c tt ,求系统的频率特性表达式。
【解】: 98.048.11)]([L )(1+++-==-s s s t c s C 闭环传递函数)9)(4(36198.048.11)()()(++=+++-==s s ss s s s R s C s G )9tg 4(tg 2211811636)9)(4(36)(ωωωωωωω--+-+⨯+=++=j ej j j G2-5-2系统时,系统的稳态输出(1))30sin()(0+=t t r ; (2))452cos(2)(0+=t t r ;(3))452cos(2)30sin()(00--+=t t t r 。
【解】:求系统闭环传递函数5tg 21254)5(4)(54)(1)()()()(14)(ωωωω--+=+=+=+==+=j B K K B K ej j G s s G s G s R s C s G s s G根据频率特性的定义,以及线性系统的迭加性求解如下:(1)︒===30,1,11θωr A︒--====-3.1151tg )1(178.0264)1()(1j j j B e eeA j G θωω[])7.18sin(78.0)1(sin )1()sin()(12︒+=++=+=t t A A t A t c r c s θθθ(2)︒===45,2,21θωr A︒--==+=-8.2152tg 274.02544)(1j j B e ej G ωω)2.232cos(48.1)(︒+=t t c s(3))8.662cos(48.1)7.18sin(78.0)(︒--︒+=t t t c s2-5-3 试求图2-5-3所示网络的频率特性,并绘制其幅相频率特性曲线。
【解】:(1)网络的频率特性1)(111)(212212+++=+++=ωωωωωC R R j C jR C j R R C j R j G(2)绘制频率特性曲线)tg (tg 22212121111)(1)(11)(ωωωωωωωT T j eT T jT jT j G ---++=++= 其中1221221,)(,T T C R R T C R T >+==。
自动控制原理及其应用课后习题第五章答案
ω
20 0 -20
10 ωc
1
2 -20dB/dec
ω
-60dB/dec
10 ≈1 ω2 0.5 c
ω c=4.5
5 ≈1 ω c=7.9 ω 0.01 c3
第五章习题课 (5-17)
-20
低频段曲线: 低频段曲线: 20lgK=20dB φ (ω ) 0 ω1=5 ω2=15 -90 相频特性曲线: 相频特性曲线: -180 -270 φ ( )= -90o ω ω=0 φ ( )= -270o ω ω=∞
-60dB/dec
ω
第五章习题课 (5-2)
10(s+0.2) 1.33(5s+1) (5) G(s)= s2(s+0.1)(s+15)=s2(10s+1)(0.67s+1) 解: 低频段曲线: 低频段曲线: 20lgK=2.5dB
第五章习题课 (5-7)
5-7 已知奈氏曲线,p为不稳定极点个数, 已知奈氏曲线, 为不稳定极点个数 为不稳定极点个数, υ为积分环节个数,试判别系统稳定性。 为积分环节个数,试判别系统稳定性。 Im υ=2 (b) p=0 (a) p=0 Im υ=0
ω=0 Re -1 0 ω=0+ -1 0 ω=0 Re
第五章习题课 (5-1)
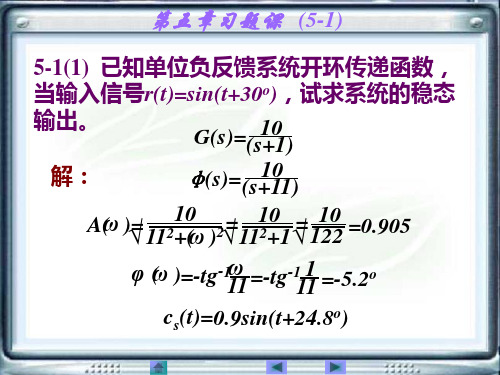
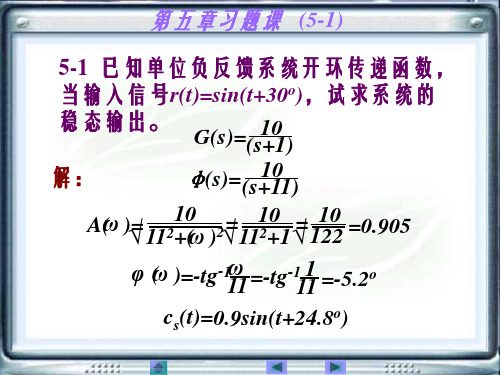
5-1(1) 已知单位负反馈系统开环传递函数, 已知单位负反馈系统开环传递函数, 当输入信号r(t)=sin(t+30o),试求系统的稳态 当输入信号 , 输出。 输出。 10 G(s)=(s+1) 10 解: φ(s)= (s+11) 10 = 10 = 10 ω A( )= 2 2 112+1√ 122 =0.905 √ 11 +( ) √ ω φ ( )=-tg-1ω =-tg-1 1 =-5.2o ω 11 11 cs(t)=0.9sin(t+24.8o)
自动控制原理第五章课后习题答案(免费)[1]
![自动控制原理第五章课后习题答案(免费)[1]](https://img.taocdn.com/s3/m/11139471f46527d3250ce001.png)
自动控制原理第五章课后习题答案(免费)5-1设单位反馈系统的开环传递函数为对系统进行串联校正,满足开环增益 及 解:① 首先确定开环增益K,00()12lim v s K SG S k →===② 未校正系统开环传函为:012()(1)G s s s =+M a g n i t u d e (d B )1010101010P h a s e (d e g )Bode DiagramGm = 70.5 dB (at 200 rad/sec) , P m = 16.5 deg (at 3.39 rad/sec)Frequency (rad/sec)③ 绘制未校正系统的开环对数频率特性,得到幅穿频率 3.4c ω=,对应相位角'0()164,16c G j ωγ∠=-∴=,采用超前校正装置,最大相角 0(180())4016630m c G j ϕγωγ=-+∠+=-+=④ 11sin ,31m αϕαα--=∴=+ 0()(1)KG s s s =+40γ=︒112K s -=⑤ 在已绘图上找出10lg 10lg3 4.77α-=-=-的频率 4.4m ω=弧度/秒 令c m ωω=⑥0.128/,0.385/m T s T s ωα=⇒==∴=校正装置的传函为:110.385()110.128Ts s G s Ts s α++==++校正后的开环传函为:012(10.39)()()()(1)(10.13)c s G s G s G s s s s +==++ 校正后1801374340γ=-=>,满足指标要求.-100-50050100M a g n i t u d e (d B )101010101010P h a s e (d e g )Bode DiagramGm = 99.2 dB (at 1.82e+003 rad/sec) , P m = 42.4 deg (at 4.53 rad/sec)Frequency (rad/sec)5-2设单位反馈系统的开环传递函数为要求 设计串联迟后校正装置。
《自动控制原理》第五章习题解答

2 ωn s( s + 2ζω n )
G( s) =
当取 r (t ) = 2 sin t 时,系统的稳态输出
css (t ) = 2 sin(t − 450 )
试确定系统参数 ω n , ζ 。 解:根据公式(5-16)和公式(5-17) 得到: c ss (t ) = A G B ( jω ) sin(ωt + ϕ + ∠G B ( jω ))
根据题目给定的条件: ω = 1 A = 2 所以: G B ( jω ) =
2 (ω n − ω 2 ) + (2ζω nω ) 2
=
=1
(1)
∠G B ( jω ) = − arctan
2ξω nω 2ξω = − arctan 2 n = −45 0 2 2 ωn − ω ωn −1
(2)
由式(1)得 ω n = (ω n − 1) + ( 2ζω n )
20
ϕ (ω )
− 89 o
− 87.2 o
− 92.1o − 164 o
− 216 o
− 234.5 o
− 246 o
− 254 o
− 258 o
ω
30
50
100
ϕ (ω )
− 262 o
− 265 o
− 267.7 o
作系统开环对数频率特性图,求得 ω c = 1 ,系统的穿越频率 ω r = 18 系统的幅值裕度和相角裕度为 h =
-26
-20
5-12 已知最小相位系统的对数幅频渐进特性曲线如图 5-50 所示, 试确定系统的开环传递函 数。 解: (a) G ( s ) =
自动控制原理课后习题答案第五章

第 五 章5-2 若系统单位阶跃响应为49()1 1.80.8tth t ee--=-+试确定系统的频率特性。
分析 先求出系统传递函数,用j ω替换s 即可得到频率特性。
解:从()h t 中可求得:(0)0,(0)0h h '==在零初始条件下,系统输出的拉普拉斯变换()H s 与系统输出的拉普拉斯变换()R s 之间的关系为()()()H s s R s =Φ⋅即()()()H s s R s Φ=其中()s Φ为系统的传递函数,又1 1.80.836()[()]49(4)(9)H s L h t s s s s s s ==-+=++++1()[()]R s L r t s ==则()36()()(4)(9)H s s R s s s Φ==++令s j ω=,则系统的频率特性为()36()()(4)(9)H j j R j j j ωωωωωΦ==++5-7 已知系统开环传递函数为)1s T (s )1s T (K )s (G 12++-=;(K、T1、T2>0)当取ω=1时, o180)j (G -=ω∠,|G(jω)|=0.5。
当输入为单位速度信号时,系统的稳态误差为0.1,试写出系统开环频率特性表达式G(jω)。
分析:根据系统幅频和相频特性的表达式,代入已知条件,即可确定相应参数。
解: 由题意知:()G j ω=21()90arctan arctan G j T T ωωω∠=---因为该系统为Ⅰ型系统,且输入为单位速度信号时,系统的稳态误差为0.1,即1()lim ()0.1ss s e E s K→∞===所以:10K =当1ω=时,(1)0.5G j ==21(1)90arctan arctan 180G j T T ∠=---=-由上两式可求得1220,0.05T T ==,因此10(0.051)()(201)j G j j j ωωωω-+=+5-14 已知下列系统开环传递函数(参数K 、T 、T i>0,i=1,2,…,6)(1))1s T )(1s T )(1s T (K)s (G 321+++=(2))1s T )(1s T (s K)s (G 21++=(3))1Ts (s K )s (G 2+=(4))1s T (s )1s T (K )s (G 221++=(5)3s K )s (G =(6)321s)1s T )(1s T (K )s (G ++=(7))1s T )(1s T )(1s T )(1s T (s )1s T )(1s T (K )s (G 432165++++++=(8)1Ts K)s (G -=(9)1Ts K )s (G +--=(10))1Ts (s K)s (G -=其系统开环幅相曲线分别如图5-6(1)~(10)所示,试根据奈氏判据判定各系统的闭环稳定性,若系统闭环不稳定,确定其s 右半平面的闭环极点数。
自控原理习题解答第五章
dk 3 2 4s 18s 20s 8 0 ds
s 1.5s 0.5 3 2 s 3 s 4.5s 5s 2
2
s 3s
3
2 2 2
1.5s 5s 1.5s 4.5s 0.5s 2 0.5s 1.5 0.5
s 0.5s 3 3 2 s 4 s 4.5s 5s 2
1
4 95.58
6求与虚轴的交点
s 1.1s 1.3s 0.5s k 0
4 3 2
s4 s3 s s
2
1 1.1 0.93 0.465 1.21k 1.1k
1.3 0.5 1.1k 0
k
s1
0
2 0.465 1.21k 0,0 k 0.38;0.93s 1.1k 0
4
j
45; l 1 : 3, 4 3 (135)
4
m i 1 i
a
p z
j1
nm
0.5 0.3 j0.96- 0.3 - j0.96- 0 0.275 4
4分离点 2 ss 0.5s 0.6s 1 k 0
试绘制系统的根轨迹图。
2实轴上的根轨迹: 0,0.5 3n m 4, 渐近线的倾角和渐近线 与实轴的交点 2l 1 , l 0,1,2
nm l 0 : 1, 2
n
k 答5 - 4Gs Hs ss 0.5 s 2 0.6s 1 1n 4, m 0, p1 0, p 2 -0.5, p 3 0.3 j0.96, p 4 0.3 j0.96
自动控制原理_第5章习题解答-
第5章频率特性法教材习题同步解析一放大器的传递函数为:G (s )=1+Ts K测得其频率响应,当ω=1rad/s 时,稳态输出与输入信号的幅值比为12/2,稳态输出与输入信号的相位差为-π/4。
求放大系数K 及时间常数T 。
解:系统稳态输出与输入信号的幅值比为A ==222172K T ω=+ 稳态输出与输入信号的相位差arctan 45T ϕω=-=-︒,即1T ω=当ω=1rad/s 时,联立以上方程得T =1,K =12放大器的传递函数为:G (s )=121s +已知单位负反馈系统的开环传递函数为5()1K G s s =+ 根据频率特性的物理意义,求闭环输入信号分别为以下信号时闭环系统的稳态输出。
(1)r (t )=sin (t +30°); (2)r (t )=2cos (2t -45°);(3)r (t )= sin (t +15°)-2cos (2t -45°); 解:该系统的闭环传递函数为65)(+=Φs s 闭环系统的幅频特性为365)(2+=ωωA闭环系统的相频特性为6arctan )(ωωϕ-=(1)输入信号的频率为1ω=,因此有37375)(=ωA ,()9.46ϕω︒=- 系统的稳态输出537()sin(20.54)37ss c t t ︒=+ (2)输入信号的频率为2ω=,因此有10()A ω=,()18.43ϕω︒=- 系统的稳态输出10()cos(263.43)2ss c t t ︒=- (3)由题(1)和题(2)有对于输入分量1:sin (t +15°),系统的稳态输出如下5371()sin( 5.54)37ss c t t ︒=+ 对于输入分量2:-2cos (2t -45°),系统的稳态输出为102()cos(263.43)ss c t t ︒=-- 根据线性系统的叠加定理,系统总的稳态输出为)4363.632cos(210)537.5sin(37375)(︒︒--+=t t t c ss绘出下列各传递函数对应的幅相频率特性与对数频率特性。
《自动控制原理》第5章习题答案
jω
期望极点
期望极点
− p3
j
600
j0.58
− p2
-1
− p1
0 -j
-3
-2
σ
-2
19.150 -1
40.880 0.33 0
119.640
校核相角条件: 根据在图中主导极点位置的近似值-0.33 ± j 0.58 和开环极点的位置, 作由各开环极点到期望主导极点的向量,
Φ = -119.640 -40.880 -19.150 = -179.670≈-1800
− p2
-10 -5
− p1
0
σ
②计算期望主导极点位置。
超调量σ% ≤ 20%,调整时间 ts ≤ 0.5s
4
ζω n
= 0.5s , ζω n = 8
σ%=e
−
ζπ
1−ζ 2
= 0.2 , ζ = 0.45 , θ = 63.2 0
故,期望主导极点位置, s1, 2 = −8 ± j15.8
期望极点
Gc ( s ) =
4,控制系统的结构如图 T5.3 所示,Gc(s)为校正装置传递函数,用根轨迹法设计校正装置,
使校正后的系统满足如下要求,速度误差系数 Kv ≥ 20,闭环主导极点 ω n = 4 ,阻尼系数 保持不变。
R(s)
+ -
Gc(s)
4 s ( s + 2)
Y(s)
图 T5.3
解:①校核原系统。
14
+20
0dB
1
Φ (ω ) 度
900 00
5
ω rad/s
ω rad/s
2,控制系统的结构如图 T5.1 所示,试选择控制器 Gc(s), 使系统对阶跃响应输入的超调量
自控原理习题答案(全)
普通高等教育“十一五”国家级规划教材全国高等专科教育自动化类专业规划教材《自动控制原理》习题答案主编:陈铁牛机械工业出版社1-11-21-3闭环控制系统主要由被控对象,给定装置,比较、放大装置,执行装置,测量和变送装置,校正装置等组成。
被控对象:指要进行控制的设备和过程。
给定装置:设定与被控量相对应给定量的装置。
比较、放大装置:对给定量与测量值进行运算,并将偏差量进行放大的装置。
执行装置:直接作用于控制对象的传动装置和调节机构。
测量和变送装置:检测被控量并进行转换用以和给定量比较的装置。
校正装置:用以改善原系统控制性能的装置。
题1-4答:(图略)题1-5答:该系统是随动系统。
(图略)题1-6答:(图略)题2-1 解:(1)F(s)=12s 1+-Ts T(2)F(s)=0.5)421(2+-s s(3)F(s)=428+⋅s es sπ(4)F(s)=25)1(12+++s s(5)F(s)=32412ss s ++ 题2-2 解:(1) f(t)=1+cost+5sint (2) f(t)=e -4t(cost-4sint)(3) f(t)=t t t te e e 101091811811----- (4) f(t)= -tt t te e e ----+-3118195214(5) f(t)= -tt e e t 4181312123--+++题2-3 解:a)dtdu u C R dt du R R c c r 22111=++)( b)r c c u CR dt du R R u C R dt du R R 1r 12112111+=++)( c) r r r c c c u dtdu C R C R dtu d C C R R u dtdu C R C R C R dtu d C C R R +++=++++)()(1211222121122111222121 题2-4 解:a) G(s)=1)(212++s T T sT (T 1=R 1C, T 2=R 2C )b) G(s)=1)(1212+++s T T s T (T 1=R 1C, T 2=R 2C )c) G(s)= 1)(1)(32122131221+++++++s T T T s T T s T T s T T (T 1=R 1C 1, T 2=R 1C 2, T 3=R 2C 1, T 4=R 2C 2 )题2-5 解:(图略)题2-6 解:33)(+=Φs s 题2-7 解:a) ksf ms s +-=Φ21)(b) )()()(1))(1)(()(21221s G s G s G s G s G s +++=Φc) )()(1)())()(()(31321s G s G s G s G s G s ++=Φd) )()()()(1))()()(323121s G s G s G s G s G s G s -+-=Φe) G(s)=[G 1(s)- G 2(s)]G 3(s)f) )()()()()()()()()()(1)()()()()(43213243214321s G s G s G s G s G s G s G s G s G s G s G s G s G s G s +-++=Φg) )()()()()()()()(1)()()()(43213212321s G s G s G s G s G s G s G s G s G s G s G s -+-=Φ题2-8 解:102310)1()()(k k s s T Ts k k s R s C ⋅++++⋅=1023101)1()()(k k s s T Ts k k s N s C ⋅++++⋅=1023102)1()()(k k s s T Ts s T k k s N s C ⋅++++⋅⋅⋅= 题2-9 解:)()()()(1)()()(4321111s G s G s G s G s G s R s C +=)()()()(1)()()(4321222s G s G s G s G s G s R s C +=)()()()(1)()()()()(432142121s G s G s G s G s G s G s G s R s C +=)()()()(1)()()(4321412s G s G s G s G s G s R s C += 题2-10 解:(1)3212321)()(k k k s k k k s R s C +=3212032143)()()(k k k s s G k k k s k k s N s C +⋅+= (2) 2140)(k k sk s G ⋅-= 题2-11 解:122212211111)()1()()(z z s T s T T C s T T s T k k s s m m d e L ⋅++⋅+++⋅=ΘΘ (T 1=R 1C, T 2=R 2C, T d =L a /R a , T m =GD 2R a /375C e C m )第三章 习题答案3-1. s T 15=(取5%误差带) 3-2. 1.0=H K K=2 3-3.当系统参数为:2.0=ξ,15-=s n ω时,指标计算为:%7.52%222.0114.32.01===-⨯---e eξξπσs t ns 352.033=⨯==ξωs t n p 641.02.01514.3122=-⨯=-=ξωπ当系统参数为:0.1=ξ,15-=s n ω时,系统为临界阻尼状态,系统无超调,此时有:st ns 95.057.10.145.67.145.6=-⨯=-=ωξ3-4.当110-=s K 时,代入上式得:110-=s n ω,5.0=ξ,此时的性能指标为:%3.16%225.0114.35.01===-⨯---e eξξπσs t ns 6.0105.033=⨯==ξωs t n p 36.05.011014.3122=-⨯=-=ξωπ当120-=s K 时,代入上式得:11.14-=s n ω,35.0=ξ,此时的性能指标为:%5.30%2235.0114.335.01===-⨯---e eξξπσs t ns 6.01.1435.033=⨯==ξω由本题计算的结果可知:当系统的开环放大倍数增大时,其阻尼比减小,系统相对稳定性变差,系统峰值时间变短,超调量增大,响应变快,但由于振荡加剧,调节时间不一定短,本题中的调节时间一样大。
自动控制原理(孟华)第5章习题解答
137习 题5-1 某系统的单位阶跃响应为c (t ) = 1-e -t +e -2t- e -4t ,试求系统的频率特性。
解:238s+8G(s)(1)(2)(4)s s s s +=+++,将s =j ω代入,得23()8+8()(1)(2)(4)j j G j j j j ωωωωωω+=+++5-2 设系统传递函数为1)1()()(12++=s T s T K s R s C 当输入信号r (t )=A sin ωt 时,试求系统的稳态输出。
解:系统的稳态输出为21()arc tan -arc tan )ss C t t T T ωωω=+5-3画出下列传递函数的Bode 图。
(1) G (s )=1121++s T s T , ( T 1 > T 2 > 0 ) ; (2) G (s )=1121+-s T s T , ( T 1 > T 2 > 0 )(3) G (s )=1121++-s T s T , ( T 1 > T 2 > 0 )解:答案见胡寿松主编《自动控制原理习题集》Page709,B5-13。
5-4画出下列传递函数对数幅频特性的渐近线和相频特性曲线。
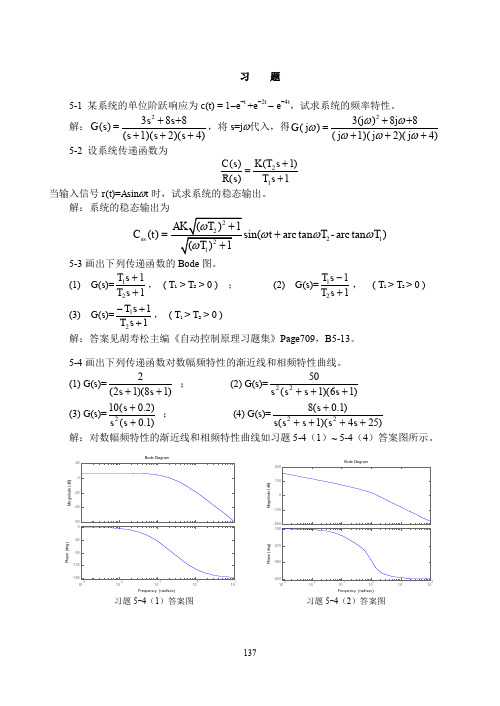
(1) G (s )=)18)(12(2++s s ; (2) G (s )=)16)(1(5022+++s s s s(3) G (s )=)1.0()2.0(102++s s s ; (4) G (s )=)254)(1()1.0(822+++++s s s s s s解:对数幅频特性的渐近线和相频特性曲线如习题5-4(1)~ 5-4(4)答案图所示。
M a g n i t u d e (d B )1010101010P h a s e (d e g )Frequency (rad/sec)M a g n i t u d e (d B )101010101010P h a s e (d e g )Frequency (rad/sec)习题5-4(1)答案图 习题5-4(2)答案图138M a g n i t u d e (d B )10101010P h a s e (d e g )Frequency (rad/sec)M a g n i t u d e (d B )10101010101010P h a s e (d e g )Frequency (rad/sec)习题5-4(3)答案图 习题5-4(4)答案图5-5系统开环传递函数如下。
《自动控制原理》课后习题答案(5章)
《自动控制原理》课后习题答案(5章)5.1 系统的结构图如图5-68所示。
试依据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出ss c 和稳态误差ss e 。
⑴()t t r 2sin =⑵()()()︒︒--+=452cos 230sin t t t r图5-1解 系统的传递函数:()()()21+==Φs s R s C s ()()()21++==Φs s s R s E s e 幅频特性及相频特性:()()2,2122ωωωωarctgj j -=Φ+=Φ()()2,21222ωωωωωωarctgarctg j e e -=Φ++=Φ(1)()2,2sin ==ωt t r 稳态输出:()()︒︒-=-+=452sin 221452sin 441t t c ss()︒-≈452sin 354.0t稳态误差:⎪⎭⎫ ⎝⎛-+++=2222sin 2221222arctg arctg t e ss()()︒︒+≈+=43.182sin 791.043.182sin 225t t(2)()()()()()︒︒︒︒+-+=--+=452sin 230sin 452cos 230sin t t t t t r⎪⎪⎭⎫ ⎝⎛+∠+++•-⎪⎪⎭⎫ ⎝⎛+∠+++=︒︒221452sin 221212130sin 211222j t j t c ss ()t t 2sin 225.3sin 55-+=︒ ()t t 2sin 708.05.3sin 447.0-+≈︒⎪⎭⎫ ⎝⎛-++++•-⎪⎭⎫ ⎝⎛-++++=︒︒222452sin 2221221130sin 12112222222arctg arctg t arctg arctg t e ss ()()︒︒︒︒︒︒-++•--++=4543.63452sin 410257.264530sin 510t t ()()︒︒+-+≈43.632sin 582.143.48sin 632.0t t ()()︒︒--+=57.1162sin 582.143.48sin 632.0t t5.2 若系统的单位阶跃响应:()t t e e t h 948.08.11--+-=()0≥t 试求系统的频率特性。
自动控制原理参考答案-第5章
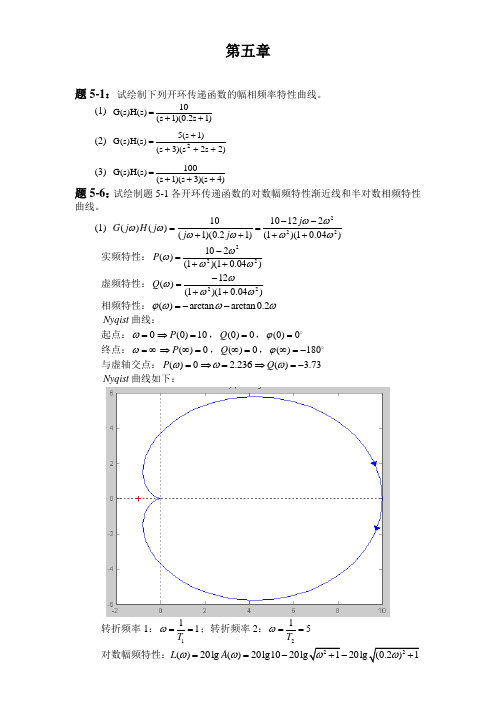
第五章题5-1:试绘制下列开环传递函数的幅相频率特性曲线。
(1) 10G(s)H(s)(s 1)(0.2s 1)=++ (2) 25(s 1)G(s)H(s)(s 3)(s 2s 2)+=+++(3) 100G(s)H(s)(s 1)(s 3)(s 4)=+++ 题5-6:试绘制题5-1各开环传递函数的对数幅频特性渐近线和半对数相频特性曲线。
(1) 2221010122()()(1)(0.21)(1)(10.04)j G j H j j j ωωωωωωωω--==++++实频特性:)04.01)(1(210)(222ωωωω++-=P虚频特性:)04.01)(1(12)(22ωωωω++-=Q 相频特性:()arctan arctan 0.2ϕωωω=-- Nyqist 曲线:起点:0ω=(0)10P ⇒=,(0)0Q =,(0)0ϕ=终点:ω=∞()0P ⇒∞=,()0Q ∞=,()180ϕ∞=- 与虚轴交点:()0P ω= 2.236ω⇒=() 3.73Q ω⇒=- Nyqist 曲线如下:转折频率1:111T ω==;转折频率2:215T ω==对数幅频特性:()20lg ()20lg10L A ωω==-半对数相频特性:()arctan arctan 0.2ϕωωω=-- Bode 图如下:(2) 25(1)()()(3)(22)j G j H j j j ωωωωωω+=+-+ 222222225(3)(2)202(12)(9)[(2)4]j ωωωωωωωω+-+-+=+-+ 实频特性:]4)2)[(9(20)2)(3(5)(2222222ωωωωωωω+-++-+=P 虚频特性:]4)2)[(9()21(10)(22222ωωωωωω+-++-=Q相频特性:2()arctan arctan arctan 310.5ωωϕωωω=--- Nyqist 曲线:起点:0ω=5(0)6P ⇒=,(0)0Q =,(0)0ϕ=终点:ω=∞()0P ⇒∞=,()0Q ∞=,()180ϕ∞=-与虚轴交点:()0P ω= 2.09ω⇒=()0.66Q ω⇒=- Nyqist 曲线如下:225(1)0.83(1)()()(3)(22)(0.331)[(0.7)1]j j G j H j j j j j j ωωωωωωωωωω++==+-++++ 转折频率1:11 1.414T ω==;转折频率2:213T ω==对数幅频特性:5()20lg ()20lg 6L A ωω==+半对数相频特性:2()arctan arctanarctan310.5ωωϕωωω=---Bode 图如下:(3) 23222100100[128(19)]()()(1)(3)(4)(1)(3)(4)j G j H j j j j ωωωωωωωωωωω-+-==++++++实频特性:)4)(3)(1()812(100)(2222ωωωωω+++-=P虚频特性:)4)(3)(1()19(100)(2223ωωωωωω+++-=Q 相频特性:()arctan arctan 0.33arctan 0.25ϕωωωω=--- Nyqist 曲线:起点:0ω=(0)8.33P ⇒=,(0)0Q =,(0)0ϕ= 终点:ω=∞()0P ⇒∞=,()0Q ∞=,()270ϕ∞=- 与虚轴交点:()0P ω= 1.22ω⇒=() 4.77Q ω⇒=- 与实轴交点:()0Q ω= 4.36ω⇒=()0.71P ω⇒=- Nyqist 曲线如下:8.33()()(1)(0.331)(0.251)G j H j j j j ωωωωω=+++转折频率1:111T ω==;转折频率2:213T ω==;转折频率3:314T ω==对数幅频特性:()20lg ()18.4L A ωω==-半对数相频特性:()arctan arctan 0.33arctan 0.25ϕωωωω=--- Bode 图如下:题5-2:已知某一控制系统的单位阶跃响应为4t 9t c(t)1 1.8e 0.8e --=-+试求该系统的开环频率特性。
自动控制原理考试试题第五章习题及答案-2
第五章 线性系统的频域分析与校正练习题及答案—-25—12 已知)(1s G 、)(2s G 和)(3s G 均为最小相角传递函数,其近似对数幅频特性曲线如图5—79所示。
试概略绘制传递函数 G s G s G s G s G s 412231()()()()()=+的对数幅频、对数相频和幅相特性曲线.解:(1) L K 11204511()lg .ω== ∴=K 1180则: G s K 11()=(2) G s K s s 22081()(.)=+20201022lg /lg K K ω== , K 21= (3)L K K 333202001110()lg lg .ωω===s s K s G K 9)(,9111.01333====∴(4) G s G G G G 412231()=+ 将G G G 123,,代入得:G s s s 41801251()(.)=+对数频率特性曲线如图解5—12(a )所示,幅相特性曲线如图解5—12(b)所示:图解5—12 (a) Bode图 (b) Nyquist图5-13试根据奈氏判据,判断题5—80图(1)~(10)所示曲线对应闭环系统的稳定性。
已知曲线(1)~(10)对应的开环传递函数如下(按自左至右顺序)。
题号开环传递函数P N NPZ2-=闭环稳定性备注1 G sKT s T s T s()()()()=+++1231110 -1 2 不稳定2 G sKs T s T s()()()=++12110 0 0 稳定3 G sKs Ts()()=+210 —1 2 不稳定4 G s K T s s T s T T ()()()()=++>12212110 0 0 稳定 5 G s K s ()=30 -1 2 不稳定 6 G s K T s T s s ()()()=++123110 0 0 稳定 7 G s K T s T s s T s T s T s T s ()()()()()()()=++++++5612341111110 0 0 稳定 8 G s KT s K ()()=->1111 1/2 0 稳定 9 G s KT s K ()()=-<1111 0 1 不稳定 10G s Ks Ts ()()=-11—1/22不稳定5-14 已知系统开环传递函数,试根据奈氏判据,确定其闭环稳定的条件:)1)(1()(++=s Ts s Ks G ; )0,(>T K(1)2=T 时,K 值的范围; (2)10=K 时,T 值的范围; (3)T K ,值的范围.解 [])()()1)(1()1()1()1)(1()(2222ωωωωωωωωωωωY X T T j T K jT j j K j G +=++-++-=++=令 0)(=ωY ,解出T1=ω,代入)(ωX 表达式并令其绝对值小于111)1(<+=T KTT X得出: T T K +<<10 或 110-<<K T(1)2=T 时,230<<K ;(2)10=K 时,910<<T ;(3)T K ,值的范围如图解5—14中阴影部分所示。
自动控制原理黄坚第二版第五章习题答案
5-4 已知系统的开环幅频率特性曲线, 写出传递函数并画出对数相频特性曲线。
(a) 20lgK=20 K=10
G(s)=(0.11s0+1)
L(ω ) dB
20
20lgK
0
10
-20dB/dec
ωc ω
(b) 20lgK=-20 K=0.1
G(s)=(0.0150ss+1)
L(ω ) dB
01
10 20
(e)
p=0
Im υ=1
-1
ω=0
0
Re
ω=0+
系统稳定
p=0
(e)
Im -1 0
υ=1
ω=0 Re
(f)
ω=0 -1
Im p=1 υ=0
0 Re
系统稳定
(a) p=1
-1
Im υ=0
ω=0
0
Re
系统稳定 ω=0+
系统不稳定
第五章习题课 (5-17)
5-17 已知系统开环幅频率特性曲线(1)写出
传递函数。(2)利用相位裕量判断稳定性(3)
ω1=0.1 ω2=0.2 ω3=15
相频特性曲线:
-40dB/dec
40
-60dB/dec
20
0 0.1 0.2 1 -20
-40dB/dec
φ (ω )
ω=0
φ (ω )=-180o
0 -90
15
ω
-60dB/dec
ω
ω=∞ φ (ω )=-270o -180 -270
第五章习题课 (5-4)
0
1 10 50 100ω
G(s)=(s+1)(0.12s+511)(0.01s+1)
自动控制原理第五章课后答案2

① 0=ν② )1)(12()12()(32222211221+++++=s T s T s T s T s T K s G k ξξ③32.0116.340lg 10lg 201111==⇒=⇒=-ωωωT032.016.314010lg lg 202222==⇒=⇒=-ωωωT025.040013==T 2.0821lg 2011≈⇒=ζζ 1621lg2022≈⇒-=ζζ④ 1.020lg 20=⇒-=K K)10025.0)(1064.0001.0()113.01.0(1.0)(22+++++=∴s s s s s s G k【解】:(1)504.12lg 2021===ωνK 其伯德图如解图(1)所示。
剪切频率204.121lg40≈⇒=c cωω相角裕量︒-≈⨯-︒⨯-︒=-8.2122.0tg 9021801γ 系统不稳定(特征方程漏项),相角裕量为负数。
(2)系统传递函数为)12.0()1(4)(2++=s s s s G其伯德图如解图(2)所示。
剪切频率(1)(2) 题2-5-12解图404.121lg20≈⇒=c cωω相角裕量︒≈⨯-=-︒⨯-+︒=----3.3742.0tg 4tg 2.0tg 902tg 1801111c c ωωγ系统稳定。
(3)一阶微分环节的介入,增加了剪切频率附近的相位,即增加了相位裕量,提高了系统的稳定性。
(4)希望中频段折线斜率为-20db/十倍频程,且该斜线的频宽越大越好。
【解】:方法一[])1()1()1()1()1)(1()1)(1(1)1)(1()1(1)(31231212321311+++-+=-+-++-++=+=s T K s T s T s T K K s T s T s T s T K s T s T s T K K GH G K s G k二阶系统,有一个右半平面的开环极点,0,1==v p 。
由开环幅相曲线可知21,1==b a 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五章 线性系统的频域分析与校正练习题及答案——25-12 已知)(1s G 、)(2s G 和)(3s G 均为最小相角传递函数,其近似对数幅频特性曲线如图5-79所示。
试概略绘制传递函数 G s G s G s G s G s 412231()()()()()=+的对数幅频、对数相频和幅相特性曲线。
解:(1) L K 11204511()lg .ω== ∴=K 1180则: G s K 11()=(2) G s K s s 22081()(.)=+20201022lg /lgK K ω== , K 21= (3)L K K 333202001110()lg lg .ωω===s s K s G K 9)(,9111.01333====∴(4) G s G G G G 412231()=+ 将G G G 123,,代入得:G s s s 41801251()(.)=+对数频率特性曲线如图解5-12(a)所示,幅相特性曲线如图解5-12(b)所示:图解5-12 (a) Bode图 (b) Nyquist图5-13试根据奈氏判据,判断题5-80图(1)~(10)所示曲线对应闭环系统的稳定性。
已知曲线(1)~(10)对应的开环传递函数如下(按自左至右顺序)。
5-14 已知系统开环传递函数,试根据奈氏判据,确定其闭环稳定的条件:)1)(1()(++=s Ts s Ks G ; )0,(>T K(1)2=T 时,K 值的范围; (2)10=K 时,T 值的范围; (3)T K ,值的范围。
解 [])()()1)(1()1()1()1)(1()(2222ωωωωωωωωωωωY X T T j T K jT j j K j G +=++-++-=++=令 0)(=ωY ,解出T1=ω,代入)(ωX 表达式并令其绝对值小于111)1(<+=T KTT X得出: T T K +<<10 或 110-<<K T(1)2=T 时,230<<K ;(2)10=K 时,910<<T ;(3)T K ,值的范围如图解5-14中阴影部分所示。
5-15 已知系统开环传递函数)5.0)(2()52(10)(2-++-=s s s s s G试概略绘制幅相特性曲线,并根据奈氏判据判定闭环系统的稳定性。
解 作出系统开环零极点分布图如图解5-15(a )所示。
)(ωj G 的起点、终点为: ︒∠=18050)0(j G ︒∠=∞010)(j G)(ωj G 与实轴的交点:[]22222222)5.1()1()5.35.5(3)1)(5(10)5.0)(2()25(10)(ωωωωωωωωωωωω+++-+++--=+-+--=j j j j j G令[]0)(Im =ωj G 可解出254.15.3/5.50==ω代入实部 []037.4)(Re 0-=ωj G概略绘制幅相特性曲线如图解5-15(b )所示。
根据奈氏判据有 2)21(212=--=-=N P Z所以闭环系统不稳定。
5-16 某系统的结构图和开环幅相曲线如图5-81 (a)、(b)所示。
图中G s s s H s s s ()(),()()=+=+111232试判断闭环系统稳定性,并决定闭环特征方程正实部根个数。
解 内回路开环传递函数: G s G s H s ss 0241()()()()==+G j G j G j ()()()0000018001800=∠=∠∞=∠-+大致画出G j 0()ω的幅相曲线如图解5-16所示。
可见G j 0()ω不会包围(-1,j0)点。
∴=-=-⨯=Z P N 00020200即内回路小闭环一定稳定。
内回路小闭环极点(即开环极点)在右半S 平面的个数为0。
P Z ==00由题5-16图(b)看出:系统开环频率特性包围(-1,j0)点的圈数 N=-1。
根据劳斯判据 2)1(20221=-⨯-=-=-=N Z N P Z系统不稳定,有两个闭环极点在右半S 平面。
5-17 已知系统开环传递函数 )18.02.0(10)(2-+=s s s s G 试根据奈氏判据确定闭环系统的稳定性。
解 作出系统开环零极点分布图如图解5-17(a)所示。
)04.01)(1()]2.01(8.0[10)1)(2.01(10)(222ωωωωωωωωω+++-=-+=j j j j j G )(ωj G 的起点、终点为:︒-∞∠=180)0(j G ︒-∞∠=+270)0(j G ︒-∠=∞2700)(j G 8)](Re[lim 0-=→ωωj G幅相特性曲线)(ωj G 与负实轴无交点。
由于惯性环节的时间常数2.01=T ,小于不稳定惯性环节的时间常数12=T ,故)(ωϕ呈现先增大后减小的变化趋势。
绘出幅相特性曲线如图解5-17(b)所示。
根据奈氏判据 2)21(212=-⨯-=-=N P Z 表明闭环系统不稳定。
5-18 已知单位反馈系统的开环传递函数,试判断闭环系统的稳定性。
)14)(1(10)(2++=ss s s G 解 作出系统开环零极点分布图如图解5-18(a)所示。
当∞→=0ω变化时,)(ωj G 的变化趋势:︒∞∠=0)0(j G ︒-∞∠=+90)0(j G ︒-∞∠=-4.153)2(j G ︒-∞∠=+4.333)2(j G ︒-∠=∞3600)(j G绘出幅相特性曲线)(ωj G 如图解5-18(b)所示。
根据奈氏判据 2)1(202=-⨯-=-=N P Z 表明闭环系统不稳定。
5-19 已知反馈系统,其开环传递函数为(1) G s s s ()(.)=+100021(2) G s s s s ()(.)()(.)=+++50021205(3) G s s s s ()(.)(.)=++100110251(4) )120)(110)(1()12(100)(++++=ss s s s s G 试用奈氏判据或对数稳定判据判断闭环系统的稳定性,并确定系统的相角裕度和幅值裕度。
解 (1) G s s s ()(.)=+100021=+10051s s () 画Bode 图得:⎪⎩⎪⎨⎧∞==⨯=g C ωω36.221005γωωω=+∠=--===∞-1801809002126100010G j tg h G C g ()..()图解5-19 (1) Bode 图 Nyquist 图(2) G s s s s ()(.)()(.)=+++50021205=+++50512121()()()s s s画Bode 图判定稳定性:Z=P-2N=0-2×(-1)=2 系统不稳定。
由Bode 图得:6>cω令: ccc j G ωωωω225501)(⋅⋅≈= 解得 3.6=cω令: 0111180225)(-=--=∠---g ggg tg tgtgj G ωωωω 解得 ωg =37.391.0501)2(1)2(1)5()(14.29225180)(18022211100=+++==-=---=∠+=---g ggg C CCG h tg tg tg j G ωωωωωωωωγ图解5-19 (2) Bode 图 Nyquist 图(3) G s s s s ()(.)(.)=++100110251=++1010141s s s()()画Bode 图得:⎩⎨⎧==⎪⎩⎪⎨⎧=⨯==⨯=10325.6104325.61040h g C γωω 系统临界稳定。
图解5-19 (3) Bode 图 Nyquist 图(4) )120)(110)(1()12(100)(++++=ss s s s s G 画Bode 图得:⎩⎨⎧==1.135.21gc ωω⎩⎨⎧-==︒-=∠+︒=)(3.9343.08.24)(180dB h c ωϕγ 系统不稳定。
5-20 设单位反馈控制系统的开环传递函数为G s as s ()=+12试确定相角裕度为45°时的α值。
解 G j a tg a ()()()ωωωω==+∠--11802210开环幅相曲线如图所示。
以原点为圆心作单位圆,在A点: A a cc ()ωωω=+=11222即: ωωc c a4221=+ (1)图解5-19(4) Bode 图要求相位裕度 γϕω=+=1804500()c即: 000113518045180)(-=-=︒-=-c c a tg ωωϕ ∴=a c ω1 (2)联立求解(1)、(2)两式得:ωc =119., a =084.。
5-21 在已知系统中G s s s H s K s h ()(),()=-=+1011试确定闭环系统临界稳定时的h K 。
解 开环系统传递函数为 )1()1(10)()(-+=s s s K s H s G h解法(一):画伯特图如图解5-21所示图解5-21)1()1(10)()(-+=ωωωωωj j j K j H j G h临界稳定时 0110018018090)(-=++--=--c h c c K tg tg ωωωϕ 01190=+--c h c K tg tg ωω∞=-+ch c ch c K K ωωωω1012=-c h K ω21ch K ω=由Bode 图 ωc =316. 1.0≈∴h K法(二) )()()1()1(10)()(ωωωωωωωjv u j j j K j H j G h +=-+=)1()1(10)(2+-+=ωωωωh K u ; )1()1(10)(22+--=ωωωωh K v 令 v ()ω=0 , 则 0)1(102=-ωh K h K 12=∴ωhK 1=∴ω (1) 又令 u ()ω=1)1()1(102-=+-+ωωωh K代入(1)得: )11()1(10+=+hh K K 019102=-+h h K K解出: 201219±-=h K 1,101-==∴h h K K (舍去)。
故当ω=10 1/秒,101=h K 时,系统临界稳定。
5-22 若单位反馈系统的开环传递函数G s Ke s s().=+-081,试确定使系统稳定的K 的临界值。
解 G j Kj e j ().ωωω=+-108幅频特性为 G j K()ωω=+12相频特性为 ϕωωωωω().().=∠+∠+=-+---ej tg j 0811108 求幅相特性通过(-1,j0)点时的K值 即 G j K()ωω=+=112(1)ϕωωωωπ()().=∠=--=--G j tg 081(2)由(2)式 tg -=-108ωπω.tg tg tg tg ()(.).-=-=-10808ωπωω ∴=-ωωtg 08. 代入(1): K tg 10812+=[(.)]ωωω8.0sec )]8.0([12=+=∴tg K解出 : ωc K ==245265.,.5-23 设单位反馈系统的开环传递函数42)1(5)(+=-s e s s G sτ 试确定闭环系统稳定的延迟时间τ的范围。