行星齿轮传动论文
ANSYS行星齿轮受力分析
樱木花道1,流川枫
(西南交大峨眉校区机械系,中国峨眉)
摘要
应用有限元理论静态分析,对行星齿轮传动进行结构静力学研究,将solid works建立的行星齿轮传动的行星架组件的三维实体模型导入ANSYS中,生成行星架组件的有限元模型,在不影响实际传动力学分析情况下,简化齿轮模型并定义齿轮厚度,在主动齿轮模型上添加移动自由度,进行结构静力学分析,得到行星架组件的应力分布图形,验证行星结构组件结构设计的合理性和正确性。
图4齿轮传动的应力分析结果
齿轮的位移变形图如下所示
图5齿轮的最大位移图
公式
D=mz(齿轮的分度圆直径等于模数乘以齿数)(1)
参考文献
[1]胡国良,任继文ANSYS11.0有限元分析,国防工业出版社
[2]陈精一,ANSYS工程分析实例教程[M],中国铁道出版社,2006.8
[3]张朝晖,ANSYS11.0结构分析工程应用实例解析[M],第二版,机械工业出版社,2008.1
关键词:行星齿轮传动系统,有限元,ANSYS,结构静力学分析
Abstract
The structure static on planetary gear transmission system is studied by using the Finite Element Analysis , the planetary gear transmission system is built with solid works modeling software, after importing the planet carrier of the planetary gear transmission system into ANSYS, the finite element analyzing is established .Under the circumstance of there is no effect to the actual analysis of the momentum, in short of the gear model, and definite the ply of it, then add the moving degree of freedom to the driving gear model, and analysis the structure statics.And the planet carrier of the stress distribution and displacement distribution are acquired. The structural design is shown to be rational and accurate.
行星齿轮传动设计

行星齿轮传动设计
1. 介绍
行星齿轮传动是一种常见的传动方式,具有紧凑结构、高扭矩传递能力和大减速比等优点,在机械工程中得到广泛应用。本文将介绍行星齿轮传动的基本原理、设计流程以及一些常见的应用场景。
2. 基本原理
行星齿轮传动由太阳轮、行星轮、内齿圈和封闭式外齿圈组成。太阳轮通过输入轴与外部动力源相连,内齿圈固定在内轴上,而行星轮则由行星支架连接,行星轮的轮毂与内齿圈啮合。通过这样的结构,实现了输入轴到输出轴的扭矩传递。
在传动过程中,太阳轮通过输入轴提供驱动扭矩,从而使行星轮绕内齿圈做旋转运动。行星轮通过其自身的轮毂与内齿圈啮合,同时也与外齿圈啮合。当太阳轮转动时,行星轮绕内齿圈做公转运动,同时自身也绕太阳轮做自转运动。最终,输出轴通过行星轮和外齿圈的结果传递扭矩。
3. 设计流程
3.1 确定传动比
传动比是行星齿轮传动设计的重要参数之一,它决定了输入扭矩和输出扭矩之间的比值。根据具体应用需求和设计要求,可以确定传动比的范围。传动比的计算公式如下:
传动比 = (1 + z2) / (1 + z1)
其中,z1为太阳轮齿数,z2为行星轮齿数。
3.2 齿轮几何参数计算
行星齿轮传动的设计还需要计算齿轮的几何参数,包括齿数、模数、压力角等。这些参数可以根据实际情况和应用要求进行确定。
3.3 强度计算
在行星齿轮传动的设计过程中,需要对齿轮进行强度计算,以确认其承载能力是否满足设计要求。常用的强度计算方法包括考虑接触应力、弯曲应力和动载荷分析等。
3.4 材料选择
根据行星齿轮传动的使用环境和工作条件,选择合适的材料以确保齿轮的强度和使用寿命。常用的行星齿轮材料包括合金钢、硬质合金等。
3K型行星齿轮传动系统动态特性研究
摘要
行星齿轮传动作为机械传动装置中最常用的传动方式之一,已长期应用于各行各业。行星齿轮传动以其结构紧凑、重量轻、效率高、承载大等一系列优点广泛应用于航空航天、汽车、风力发电、仪器仪表、起重机械等领域。本文基于马鞍山市科技局项目“新型机器人关节减速器”,对3K型行星齿轮传动系统进行了动态特性研究。本文针对有限元法计算齿轮啮合刚度建模复杂、效率低等问题,通过推导渐开线齿轮精确齿面方程,利用APDL与UIDL语言对ANSYS进行二次开发,便于高效计算齿轮啮合刚度。针对3K型行星齿轮传动系统多啮合角、多变位的复杂性,采用集中质量法建立了通用的3K型行星齿轮传动动力学模型并对模型进行了数值仿真,所建模型可适用于任意几何参数下系统的动态特性分析。同时,本文针对行星轮系中双联行星轮的特殊结构,提出了双联行星轮角度偏差的建模方法,研究了双联行星轮角度偏差对系统均载特性的影响,总结了含双联行星轮角度偏差下系统各参数对系统均载特性及其分岔与混沌的影响规律。
本文研究了双联行星轮角度偏差的表示方法,以典型3K-I型行星齿轮传动系统为算例分析了误差及转速对系统均载特性及周期稳定性的影响,得到了系统的幅频特性曲线及分岔图。所做工作有利于更加深入研究复杂行星轮系动力学行为。
关键词:行星齿轮;动力学;3K;均载;双联齿轮
ABSTRACT
As one of the most commonly used components in mechanical transmission, planetary gear transmission has long been used in all walks of life. Planetary gear transmission is widely used in aerospace, automobile, wind power, instrumentation, lifting machinery and other fields owing to multiple advantages such as compact structure, light weight, high efficiency and bearing capability. This thesis is based on Ma’anshan Science and Technology Project " Micro-segment gear robot joint reducer R & D " focusing on the dynamic characteristics of the 3K planetary gear drive system. In this thesis, multiple improvements have been made to address the high-complexity and low-efficiency defect that the finite element method has in calculating the gear meshing stiffness; the exact tooth surface equation of involute gear has been derived and secondary development for ANSYS though APDL and UIDL has been accomplished leading to an enhancement in efficiency when calculating the gear meshing stiffness. Aiming at the complexity of multi-engagement angle and multi-displacement of 3K planetary gear drive system, a universal kinematic model of 3K planetary gear drive is established using mass-concentration method and the numerical simulation is carried out. The model applies to any system dynamic characteristics analysis under any geometry parameters. In the meantime, aiming at the special structure of double planetary gears in planetary gear train, a method of modeling the double planetary gear angular deviation is proposed. The influence of double planetary gear angular misalignment on the load sharing characteristics of the system is studied. Influence of system parameters on equal load characteristics and its influence on bifurcation and chaos under planetary wheel angular deviation have been summarized.
行星齿轮传动论文

⾏星齿轮传动论⽂
RV减速器的传动⽐、回转误差和受⼒分析
齐彩娟
201010418175 《⾏星齿轮传动》
摘要 RV减速器是采⽤摆线针⾏星传动和渐开线传动相结合的2K-V⾏星传动,具有传动平稳、振动、冲击和噪⾳均⼩的特点。本⽂主要介绍了RV减速器的传动⽐、回转误差和受⼒分析,并针对机构的薄弱环节,如转臂轴承等,从理论上分析了RV结构的优点,并给出了改进⽅案。
关键词 RV传动;⾏星传动;传动⽐;回转误差;受⼒分析
前⾔
⽬前,国内外减速器的种类虽然很多,但普通圆柱齿轮减速器的体积⼤,结构笨重。普通的蜗轮减速器在传递⼤传动⽐时,效率较低。国内外动⼒齿轮传动正沿着⼩型化、⾼速化、标准化、⼩振动、低噪声的⽅向发展,⾏星齿轮传动的发展是当代齿轮的⼀⼤特征,是齿轮传动⼩型化的⼀个典型的标志。
⾏星齿轮传动把定轴传动改为动轴传动,采⽤了功率分流并合理应⽤内啮合以及采⽤合理的均载装置,使⾏星传动具有许多显著的特点,主要体现在重量轻、体积⼩、机构紧凑、传动⽐范围⼤、承载能⼒⾼、效率⾼,因此,⾏星传动技术的应⽤⽇渐⼴泛。
RV减速器是采⽤摆线针轮⾏星传动和渐开线传动相结合的2K-V⾏星传动,具有传动⽐范围⼤、承载能⼒⼤、传动效率⾼和传动轴扭矩刚性⼤等优点,多⽤于机器⼈、航天航空等精密传动的场合,有很好发展前景。
⼀. RV减速器的传动⽐
图1.RV传动简图
按照转化机构法,假设⾏星架固定时,太阳轮与⾏星轮的传动⽐
s
p H p H
s H
sp z z w w w w i -=--=
(1 )
式中p z , s z 分别是⾏星轮和太阳轮的齿数;p w ,s w ,H w 分别为⾏星轮、太阳轮和⾏星架的⾓速度。第⼆级传动为摆线针轮传动。假设曲柄轴固定,即⾏星轮固定时,摆线针轮传动⽐
行星齿轮的自转与公转
行星齿轮的自转与公转
1.引言
1.1 概述
概述部分的内容可以根据文章整体的主题和目的进行编写。在这篇长文中,文章主要讨论的是行星齿轮的自转与公转的现象及其相关原理和关系。
在引言的概述部分,我们可以先简要介绍行星齿轮和自转与公转的概念。行星齿轮是一种机械传动装置,其结构类似于太阳系中的行星运动,因而得名。自转是行星齿轮内部某一个齿轮的旋转运动,而公转则是行星齿轮整体围绕中心轴的旋转运动。这两种运动的协同作用使得行星齿轮能够实现更加复杂的传动方式,具有广泛的应用领域。
接着,在概述部分中,可以提及本文的结构安排,即接下来将分别介绍自转的定义和原理,以及行星齿轮的自转现象。自转的定义和原理部分将展开对自转概念的解释,并阐述自转运动的发生机制和影响因素。行星齿轮的自转现象部分将具体讲述行星齿轮内部各个齿轮之间的自转关系,以及其在传动中的特殊功能和应用。
最后,可以简要提及本文的目的,即通过对行星齿轮的自转与公转现象的研究,进一步了解该机械传动装置的工作原理和特点。深入理解这些
概念和原理,有助于实际工程应用和改进设计,也能为机械传动领域的研究提供新的思路和方向。
综上所述,引言部分的概述内容应包括对行星齿轮、自转和公转的简要介绍,以及本文的结构安排和目的。这些内容将为读者提供一个整体的了解,并引导他们进入文章的正文部分。
1.2文章结构
1.2 文章结构
本文将分为三个主要部分来探讨行星齿轮的自转与公转现象。首先,在引言部分中将概述本文要讨论的内容和目的,为读者提供一个整体的了解。其次,在正文部分中,将分为两个小节来详细介绍自转的定义和原理,以及行星齿轮的自转现象。最后,在结论部分中,将探讨自转与公转的关系,并探讨行星齿轮自转和公转的应用前景与意义。
K-H-V行星齿轮减速器毕业论文
K-H-V⾏星齿轮减速器毕业论⽂K-H-V⾏星齿轮减速器毕业论⽂
⽬录
第⼀章绪论 (1)
第⼆章K-H-V⾏星齿轮 (4)
2.1 K-H-V⾏星齿轮的传动原理及组成 (4)
2.2 K-H-V⾏星齿轮的特点 (6)
2.3 K-H-V⾏星齿轮的现状及发展⽅向 (7)
第三章原始数据及系统组成框图 (11)
3.1 原始数据 (11)
第四章齿轮的计算 (13)
4.1 齿数及齿轮材料的确定 (13)
4.2 啮合⾓、变位系数的确定 (13)
4.3 计算四个偏导数 (16)
4.4 及相对应的计算 (17)
4.5 ⼏何尺⼨的计算和限制条件检查 (17)
4.6 切削内齿轮插齿⼑的选择 (18)
4.7 径向切齿⼲涉 (18)
4.8 插齿啮合⾓ (20)
4.9 切削内齿轮其他限制条件检查 (20)
4.9.1 展成顶切⼲涉 (20)
4.9.2 齿顶必须是渐开线 (20)
4.9.3 切削外齿轮的限制条件 (20)
4.10 内啮合的其他限制条件 (21)
4.10.1 渐开线⼲涉 (21)
4.10.2 外齿轮齿顶与内齿轮齿根的过渡曲线⼲涉 (21)
4.10.4 顶隙检查 (22)
第五章强度计算 (24)
5.1 转臂轴承寿命计算 (24)
5.2 销轴受⼒ (25)
5.3 销轴的弯曲应⼒ (26)
5.4 销套与浮动盘平⾯的接触应⼒ (26)
第六章效率计算 (26)
6.1 啮合效率 (26)
6.1.1 ⼀对内啮合齿轮的效率 (26)
6.1.2 ⾏星机构的啮合效率 (27)
6.2 输出机构的效率 (27)
6.3 转臂轴承效率 (27)
行星齿轮的发明
行星齿轮的发明
全文共四篇示例,供读者参考
第一篇示例:
行星齿轮是一种广泛应用于机械传动系统中的装置,其发明为机械工程领域带来了革命性的变革。行星齿轮由太阳轮、行星轮和环形轮组成,通过它们之间的互相咬合和转动,实现了高效的传动功能。本文将探讨行星齿轮发明的历史背景、原理及其在不同领域的应用。
行星齿轮的发明可以追溯到17世纪,当时英国数学家罗伯特·惠特沃思利用了行星运动的概念设计了第一个行星齿轮系统。直到19世纪末,德国工程师乔治·克雷格尔发明了现代行星齿轮系统,才真正实现了行星齿轮在工业生产中的应用。克雷格尔的发明为当时的工业革命带来了重大的影响,极大地提高了机械设备的效率和稳定性。
行星齿轮的原理是利用多个齿轮的组合,通过它们之间的咬合和转动实现功率传递。在行星齿轮系统中,太阳轮固定在中心,行星轮绕太阳轮旋转,并且同时绕自身中心旋转,而环形轮则连接行星轮并固定在外部。这种设计使得行星齿轮系统具有更高的传动比和更稳定的传动效果,适用于需要大功率输出和紧凑结构的机械设备。
行星齿轮在各个领域都有着广泛的应用。在汽车工业中,行星齿轮被广泛应用于汽车变速器和差速器中,提高了汽车的性能和驾驶舒适性。在航空航天领域,行星齿轮被用于飞机发动机和导航系统中,
确保了飞行器的正常运行和操控。行星齿轮也被应用于工业机械设备、电动工具、家用电器等各种领域,为现代工业生产提供了可靠的动力
传递解决方案。
行星齿轮的发明为机械工程领域带来了革命性的变革,其高效的
传动功能和稳定的运行性能使其成为现代工业生产中不可或缺的部件。随着科技的不断发展和创新,行星齿轮技术也在不断完善和改进,为
单排单行星齿轮机构一般运动规律方程式
单排单行星齿轮机构一般运动规律方程式
1. 引言
1.1 概述
在现代机械领域中,齿轮传动作为一种常见的传动方式,被广泛应用于各种机械装置和设备中。单排单行星齿轮机构作为其中的一类特殊结构,在其简洁紧凑的设计和高效率的工作原理下取得了广泛关注。本文将深入研究单排单行星齿轮机构的运动规律方程式,以揭示其运转过程中的内部性质与特点。
1.2 文章结构
本文共分为五个主要部分。引言部分(第1节)简要介绍了撰写这篇长文的背景,并对文章所涉及内容进行了预览。接下来是单排单行星齿轮机构的介绍(第2节),包括其定义和组成部分、工作原理以及应用领域。之后是关键部分,即单排单行星齿轮机构的运动规律方程式(第3节),包括转速比计算公式推导、输入输出转矩计算方法以及齿轮传动效率分析与优化。第4节将通过实例分析与研究结果展示来验证前面提到的方程式和方法的可行性,并介绍运动规律的仿真验证与实际应用案例。最后,文章将在结论与进一步研究建议部分(第5节)总结研究结果并提出未来扩展研究的建议。
1.3 目的
本文的目的在于通过深入研究单排单行星齿轮机构的运动规律方程式,揭示其内
部传动特性和工作原理。通过对转速比计算公式推导、输入输出转矩计算方法以及齿轮传动效率分析与优化等方面进行详细探讨,旨在为工程师提供一个全面且系统的了解和应用指南。同时,本文还将通过实例分析与研究结果展示验证所提出的方程式和方法,并展示其在实际应用中的有效性和可行性。最后,本文将总结当前研究结果,并提出进一步扩展研究方向的建议,以促进该领域未来更深入而宏观的发展。
行星齿轮传动的设计计算——张庆波

wa Za = wa ( Za + Zc )+ wc Zc (3)
可以推导出行星轮相对于行星架的相对转速
n = 1 H
(4) Za (na −nc ) Zc
式中, Zc —行星轮齿数; nc —行星架的转速(r/min)。
将相关参数带入上式可得行星轮相对于行星架的相对转速为
n1 H
=
20(640−118.52) 34
转速计算公式在差动轮系中也可以使用。式中的 na 、 nb 、 nH 都不为零, na 、 nb
为两输入转速,即电机转速,是已知条件,由此可求出输出转速 nH 。 2 行星轮系传动扭矩计算
在 2K-H 型周转轮系中,设作用在中心轮 a、b 和转臂 H 三个基本构件上的
外力矩为 M a 、M b 和 M H 。当轮系处于等速运转时,根据力学的平衡原理,作用 在基本构件上的外力矩之和等于零,即
Φi=2.3μ(1/Z1±1/Z2) (10)
式中:μ—齿面摩擦系数,对于 NGW 型传动,可取μ=0.05~0.10; Z2、Z1—
齿轮副中大小齿轮的齿数,内啮合时 Z2 表示内齿圈的齿数,“+”号用于外啮合,
“—”号用于内啮合。
根据以上理论及公式,对减速机的效率进行验算。
首先计算其转化轮系(即定轴轮系)的传动效率。
=0.961645
通过计算,其传动效率满足使用要求,并且验证了某些行星轮系的传动效率 比其对应的定轴轮系的传动效率还要高。
少齿差行星齿轮传动分析及应用
少齿差行星齿轮传动分析及应用
摘要:少齿差行星齿轮传动由行星齿轮传动演变而来,由于行星齿轮副内外齿轮的齿数相差很少,因此简称少齿差传动,通常指渐开线少齿差行星齿轮传动。少齿差轮系按传动形式可分为N型和NN型,其输出机构又设计成多种形式,文章分析轮系传动比的计算方法,对其典型结构的效率计算做了阐述,少齿差传动以其大传动比、小体积、轻重量、传动效率高等优点,在化工、轻工、冶金等机械设备中获得广泛应用。
关键词:少齿差传动;传动比;传动效率
Abstract: the less tooth differenced planetary gear transmission of planetary gear transmission by evolved, by the planet gear pair of internal and external gear are very few number, so fewer tooth difference as transmission, usually refers to the involute less tooth differenced planetary gear transmission. Less tooth was sent by the transmission forms can be divided into N type and NN type, its export agencies and design into a variety of forms, this paper analyzes the calculation method of gear transmission ratio, the typical structure of the calculation efficiency paper and less tooth difference with its large transmission transmission, small volume, light weight, high transmission efficiency advantage, in the chemical industry, the light industry, metallurgy, and other machinery and equipment were widely available.
行星齿轮传动结课论文
行星齿轮传动结课论文——行星齿轮传动学习报告
学院:机械学院
专业:机械设计及理论
学号:
姓名:
摘要:与普通定轴齿轮传动相比,行星齿轮传动具有体积小、质量轻、传动比大、承载能力大、传动平稳及传动效率高等优点。行星齿轮传动不仅适用于高速、大功率的场合,而且可用于低速、大转矩的机械传动装置上。它可以用作减速、增速和变速传动,运动的合成和分解,因此它在现代机械传动的发展中有着比较重要的作用。行星齿轮传动现已被人们用来代替普通齿轮传动,而作为各种机械传动系统中的减速器、增速器和变速装置。尤其是对于那些要求体积小、质量小、结构紧凑和传动效率高的航空发动机、起重运输、石油化工和兵器等的齿轮传动装置以及需要差速器的汽车和坦克等车辆的齿轮传动装置,行星齿轮传动已得到了越来越广泛的应用。
关键词:行星齿轮,减速,传动,机械
1。概述
渐开线行星齿轮传动既具有功率分流又具有动轴线的运动特点,同时还合理使用了内啮合,使其相对轴线齿轮传动具有很多优点,如结构紧凑、承载能力大、效率高、工作平稳、适用范围广,因此渐开线行星齿轮传动在工程中得到了广泛使用.近代渐开线行星齿轮传动在结构设计上取得了一系列突破,其中的重大突破是成功使用了均载机构,从而解决了由于制造、装配和构件变形等原因引起的减速器的各行星轮之间的载荷分配不平均的问题,使功率能够在各个行星轮之间进行均匀分流从而使行星齿轮传动日趋完善。
我国的行星齿轮传动有许多年的发展历史。大约在20世纪60年代,我国开始对行星齿轮传动开展了比较全面、系统的设计、研究和制造的工作.1976年颁布NGW行星齿轮减速器系列(GB1799—76)标准,分一级、二级、三级三个系列,最大输入功率为
行星齿轮传动设计
行星齿轮传动设计
引言
行星齿轮传动是一种常见的机械装置,广泛应用于工业、汽车、航空航天等领域。其特点是结构紧凑、传动比大、承载能力强等优点。本文将介绍行星齿轮传动的基本原理和设计步骤。
基本原理
行星齿轮传动由太阳轮、行星轮和内齿轮组成。太阳轮是固定不动的,行星轮
绕太阳轮旋转,内齿轮与行星轮上的齿轮啮合。传动比由太阳轮的齿数、行星轮的齿数和内齿轮的齿数共同决定。
行星齿轮传动的基本原理如下:
1.太阳轮转动一周,行星轮转动n周;
2.太阳轮齿数与行星轮齿数之比为1:n;
3.太阳轮齿数与内齿轮齿数之比为1:(n+1);
根据上述原理,可以计算出行星齿轮传动的传动比和输入输出的转速关系。
设计步骤
进行行星齿轮传动的设计,需要按照以下步骤进行:
1.确定输入和输出参数:包括输入功率、输入转速、输出转速、传动比
等;
2.选择行星轮和太阳轮的齿数:根据传动比和输入输出转速关系,选择
合适的行星轮和太阳轮的齿数;
3.确定行星轮的位置:行星轮通常有几颗,需要确定每颗行星轮的位置,
以及行星轮与太阳轮的啮合方式;
4.计算内齿轮的齿数:根据太阳轮和行星轮的齿数,计算出内齿轮的齿
数;
5.绘制行星齿轮传动的示意图:根据上述计算结果,绘制行星齿轮传动
的示意图;
6.进行传动效率计算:根据输入功率和输出功率,计算传动效率;
7.进行强度计算:根据输入功率、传动比和材料强度等参数,计算行星
齿轮传动的承载能力。
实例演示
为了更好地理解行星齿轮传动的设计过程,以下是一个实例演示:
假设输入功率为100W,输入转速为1000rpm,输出转速为500rpm,要求传动比为2:1。
行星齿轮机构传动比计算方法
行星齿轮传动速比计算方法综述
杨桂香 郭志强 王明海 杨珍
(中国一拖集团有限公司,河南 洛阳 471039)
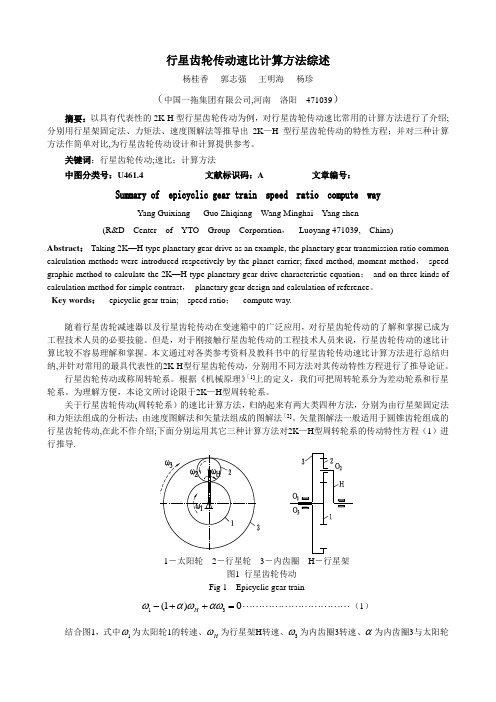
摘要:以具有代表性的2K-H 型行星齿轮传动为例,对行星齿轮传动速比常用的计算方法进行了介绍;分别用行星架固定法、力矩法、速度图解法等推导出2K —H 型行星齿轮传动的特性方程;并对三种计算方法作简单对比,为行星齿轮传动设计和计算提供参考。
关键词:行星齿轮传动;速比;计算方法
中图分类号:U461.4 文献标识码:A 文章编号:
Summary of epicyclic gear train speed ratio compute way
Yang Guixiang Guo Zhiqiang Wang Minghai Yang zhen
(R&D Center of YTO Group Corporation , Luoyang 471039, China)
Abstract : Taking 2K —H type planetary gear drive as an example, the planetary gear transmission ratio common calculation methods were introduced respectively by the planet carrier; fixed method, moment method , speed graphic method to calculate the 2K —H type planetary gear drive characteristic equation ; and on three kinds of calculation method for simple contrast , planetary gear design and calculation of reference 。
NGW型行星齿轮传动及优化设计 8
NGW型行星齿轮传动及优化设计
所在学院机械与电气工程学院
专业机械设计制造及其自动化
班级
姓名
学号
指导老师
年月日
诚信承诺
我谨在此承诺:本人所写的毕业论文《NGW型行星齿轮传动系统的优化设计》均系本人独立完成,没有抄袭行为,凡涉及其他作者的观点和材料,均作了注释,若有不实,后果由本人承担。
承诺人(签名):
年月日
摘要
渐开线行星齿轮减速器是一种至少有一个齿轮绕着位置固定的几何轴线作圆周运动的齿轮传动,这种传动通常用内啮合且多采用几个行星轮同时传递载荷,以使功率分流。渐开线行星齿轮传动具有以下优点:传动比范围大、结构紧凑、体积和质量小、效率普遍较高、噪音低以及运转平稳等,因此被广泛应用于起重、冶金、工程机械、运输、航空、机床、电工机械以及国防工业等部门作为减速、变速或增速齿轮传动装置NGW型行星齿轮传动机构的传动原理:当高速轴由电动机驱动时,带动太阳轮回转,再带动行星轮转动,由于内齿圈固定不动,便驱动行星架作输出运动,行星轮在行星架上既作自转又作公转,以此同样的结构组成二级、三级或多级传动。NGW型行星齿轮传动机构主要由太阳轮、行星轮、内齿圈及行星架所组成,以基本构件命名,又称为ZK-H型行星齿轮传动机构。
本设计的基本思想是以两级外啮合接触强度相等为原则分配传动比,而构造是以高速级传动比为设计变量的目标函数,采用黄金分割法得到合理的传动比分配。然后采用离散变量的组合型法分别进行单级传动的优化设计。
关键词:渐开线齿轮,离散变量,齿轮传动,优化设计
Abstract
Involute planetary gear reducer is a kind of at least one gear around the axis of the geometry of the fixed position for circular motion of gear transmission, the transmission usually use internal meshing and use more several planet round and load, in order to make power diversion. Involute planetary gear transmission has the following advantages: transmission range, compact structure, small volume and quality, and generally high efficiency, low noise and stable operation, etc, so are widely used in lifting, metallurgy, construction machinery, transportation, aviation, machine tools, electric machinery and defense industry and other sectors for slowing down, variable speed or growth gear transmission device
行星齿轮传动的设计计算——张庆波
=
306.75 r/min
差动轮系主要用于变速和差速中,由于差动轮系有 2 个自由度,自然也就有
两个输入,所以,一般情况下,在差动轮系中需要计算的是其转速之间的关系,
而其转速的计算也是以转化轮系为基础,对于除外齿圈外,其余各部件都相同的
行星轮系与差动轮系,它们的转化轮系都为同一定轴轮系,所以行星轮系的一些
Φi=2.3μ(1/Z1±1/Z2) (10)
式中:μ—齿面摩擦系数,对于 NGW 型传动,可取μ=0.05~0.10; Z2、Z1—
齿轮副中大小齿轮的齿数,内啮合时 Z2 表示内齿圈的齿数,“+”号用于外啮合,
“—”号用于内啮合。
根据以上理论及公式,对减速机的效率进行验算。
首先计算其转化轮系(即定轴轮系)的传动效率。
M awaHη0 + M bwbH =0 (6) 当 M a 与 waH 异向时(即 M awaH <0),轮 a 为转化机构的被动轮,轮 b 为主动 轮, M awaH 为输出功率,啮合功率由中心轮 b 流向中心轮 a。根据功率的平衡条 件可得 M awaH + M bwbHη0 =0 (7)
i 由于
M a + M b + M H =0 (5) 用上式确定外力矩的关系时应带入正负号。
基本构件上作用的外力矩与其绝对角速度的乘积( Mw )称为绝对功率或轴 功率。当力矩和角速度的方向相同时,其轴功率为正, Mw >0,即为输入功率
自动洗衣机行星齿轮减速器的设计-毕业论文
自动洗衣机行星齿轮减速器的设计-毕业论
文
自动洗衣机行星齿轮减速器的设计-毕业论文哈尔滨理工大学专科生毕业论文自动洗衣机行星齿轮减速器的设计摘要本文阐述一种自动洗衣机内部的行星轮系减速器。
在洗衣机中使用行星轮系减速器正是利用了行星齿轮传动:
体积小、质量轻、结构紧凑、承载能力大、传动效率高、传动比较大、运动平稳、抗冲击和震动的能力较强、噪声低的特点。
行星轮减速器利用齿轮减速器的原理,用于低转速大扭矩的传动设备,把电动机高速运转的动力,通过减速机的输入轴上的齿数少的齿轮,啮合输出轴上的大齿轮来达到减速的目的。
由于行星轮系减速也存在很多缺点,它不仅要材料优质、结构复杂、制造精度要求较高、安装较困难些,设计计算也较一般减速器复杂。
本文主要就对这些缺点加以改进,使洗衣机的工作性能更加的平稳。
随着对行星传动技术进一步的深入地了解和掌握,以及对国外行星传动技术的引进和消化吸收,从而使其传动结构和均载方式都不断完善,同时生产工艺水平也不断提高,完全
可以制造出更好的行星齿轮传动减速器。
关键词:
行星轮系减速器;行星轮;太阳轮;行星架IV 目录摘要I 第1章绪论1 1.1 课题背景1 1.2 国内外的研究现状和发展趋势1 1.3 主要研究内容1 第2章传动原理及特点3 2.1 行星齿轮传动原理3 2.2 有关固定参数和工作原理3 2.3 行星轮系减速器特点5 2.4 本章小结5 第3章传动系统方案的设计6 3.1 传动方案的分析与拟定6 3.1.1 对传动方案的要求6 3.1.2 拟定传动方案6 3.2 行星齿轮传动设计6 3.2.1 传动比和效率计算6 3.3 传动的配齿计算7 3.4 几何尺寸和啮合参数计算8 3.5 传动强度计算及校核11 3.6 行星齿轮传动的受力分析12 3.7 本章小结15 第4章轮架与输入输出轴的设计17 4.1 齿轮材料及精度等级17 4.2 减速器齿轮输入输出轴的设计17 4.2.1 减速器输入轴的设计17 4.2.2 减速器输出轴的设计19 4.3 本章小结21 结论22 参考文献23 致谢24 哈尔滨理工大学专科生毕业论文第1章绪论1.1 课题背景本课题研究的是一种自动洗衣机的行星齿轮减速器,其特征在于采用由太阳轮、均匀排布在太阳轮外周并与太阳轮外啮合的各行星轮、以及与所述各行星轮内啮合的内齿轮构成的行星轮系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
RV减速器的传动比、回转误差和受力分析
齐彩娟
201010418175 《行星齿轮传动》
摘要 RV减速器是采用摆线针行星传动和渐开线传动相结合的2K-V行星传动,具有传动平稳、振动、冲击和噪音均小的特点。本文主要介绍了RV减速器的传动比、回转误差和受力分析,并针对机构的薄弱环节,如转臂轴承等,从理论上分析了RV结构的优点,并给出了改进方案。
关键词 RV传动;行星传动;传动比;回转误差;受力分析
前言
目前,国内外减速器的种类虽然很多,但普通圆柱齿轮减速器的体积大,结构笨重。普通的蜗轮减速器在传递大传动比时,效率较低。国内外动力齿轮传动正沿着小型化、高速化、标准化、小振动、低噪声的方向发展,行星齿轮传动的发展是当代齿轮的一大特征,是齿轮传动小型化的一个典型的标志。
行星齿轮传动把定轴传动改为动轴传动,采用了功率分流并合理应用内啮合以及采用合理的均载装置,使行星传动具有许多显著的特点,主要体现在重量轻、体积小、机构紧凑、传动比范围大、承载能力高、效率高,因此,行星传动技术的应用日渐广泛。
RV减速器是采用摆线针轮行星传动和渐开线传动相结合的2K-V行星传动,具有传动比范围大、承载能力大、传动效率高和传动轴扭矩刚性大等优点,多用于机器人、航天航空等精密传动的场合,有很好发展前景。
一. RV减速器的传动比
图1.RV传动简图
按照转化机构法,假设行星架固定时,太阳轮与行星轮的传动比
s
p H p H
s H
sp z z w w w w i -=--=
(1 )
式中p z , s z 分别是行星轮和太阳轮的齿数;p w ,s w ,H w 分别为行星轮、太阳轮和行星架的角速度。 第二级传动为摆线针轮传动。假设曲柄轴固定,即行星轮固定时,摆线针轮传动比
c
r
p
r p c p cr z z w w w w i =
--=
(2) 式中:r z ,c z 分别为针轮与摆线轮齿数;c w ,r w 分别为摆线轮和针轮的角速度。行星架的转速和摆线轮转动速度一致
H c w w = (3)
摆线针轮齿数关系满足
1-=r c z z (4)
当针轮固定时
0=r w (5)
由式(1)-式(5)可得,行星轮与太阳轮的转速比
()
p
r s c
s s
p c c
s
p ps z z z z z z z z z w w i +-=
++-
==
11 (6)
行星架与太阳轮的转速比
()
s
p c s
H
Hs z z z w w i 111++==
(7)
二.RV 传动的回转传动误差
2.1.两级传动的RV 减速器中,第一级误差对传动精度的影响很小,设计时可以不做重点考虑。 2.2.对传动精度影响较大的单项误差为:
摆线轮的累积周节误差、曲柄轴偏心误差、摆线轮曲柄轴孔偏心误差、摆线轮齿槽偏差、针齿累积周节误差。
2.3.以下情形的综合误差对传动精度影响最大:
三个曲柄轴偏心不同、曲柄轴周向误差、两摆线轮三曲柄轴孔误差不同相位安装、摆线轮三曲柄轴孔
周向偏心误差、两摆线轮曲柄轴三孔误差反向、两摆线轮周节累积误差相位相差180°、两摆线轮理论齿廓平均半径的误差符号恰好相反。
在无法提高加工精度的情况下,控制误差的相位是很重要的。 2.4.多误差同时作用下的传动精度不能用单个误差作用的简单迭加求得。
三.RV 传动的受力分析
由于RV 传动是两级闭式行星传动,且第二级为多齿啮合传动。因此,RV 轮与各针齿间的啮合以及曲柄与RV 轮的受力情况和载荷分布均很复杂。它除了受变形的影响外,还受到制造误差、啮合间隙的影响。
3.1.一级准2KH 的受力
RV 传动第一级由内齿轮的准2HK 行星传动构成,其受力如图2所示。图中1a T 表示外界作用在中心轮1a 上的力矩;V T 为外界作用在输出圆盘W 上的力矩;b T 是外界作用在针轮2b 上的力矩。为便于分析,以XY T 表示对象X 对对象Y 施加的力矩;XY F 表示对象X 对对象Y 施加的力。现分别以太阳轮1a 和行星轮1g 为研究对象,有
0=∑O M ,01111=-a a a g T r nF
(8)
0=∑oH M ,01111=+-H g g a g T r F (9)
0=∑F ,0111=-a g H g F F (10)
根据作用力与反作用力的关系可得
01111=-g a a g F F (11)
由式(8)—式(11)解得
()
11111111a a H g a g g a r n T F F F ⋅=== (12) ()
1111111a g a g g a H g Z Z n T r F T ⋅== (13)
3.2.RV 轮的受力分析
图3.RV 轮的受力简图
现在RV 结构中心O 上建立一坐标系,坐标原点为O ,Y 轴与曲柄弯曲方向重合: rv O 为RV 轮的中心,如图3所示,以RV 轮为研究对象:它承受两种力:针轮对RV 轮的作用力i p ,都通过节点P,以及曲柄对RV 轮的作用力1j F 、2j F 、3j F 。为简化起见,把它们分别表示在图3(a )、(b)中。图3(a )表示各针轮与RV 轮间的啮合力i p ,其合力用∑ix
p 和
∑iy
p
来表示;图(b )表示了曲柄与RV 轮间的作用力,而针轮与RV 轮间
的啮合力则用
∑ix
p
和
∑iy
p
代替。为了确定作用力i p 的大小,假定转化机构中RV 轮瞬间不动,且对针
轮即壳体施加一力矩2b T ,在该力矩作用下,啮合各齿产生弹性变形,设第i 个针齿中心在针齿分布圆切线方向产生的微小位移为u ∆,则u ∆在其作用在RV 轮上的力i p 方向的分量为
()Z i i R l u a u ∆=∆cos (14)
根据胡克定理有()Z i i R l u p ∆∞,当2b i r l =时,则max p p i =即()
Z b R r u p 2max ∆=,因此可得 ()2
'
max b i
r l i p p = (15)
图3(a )中POB C PO rv ∆=∆~,则有以下几何关系:
i g b i l r l θsin 22'
== (16) 2112122
cos 21cos 222
S R K K R r R r R PO Z b Z b b Z b Z i i i =-+=-+=
θθ (17) i b i i Z PO R θθsin sin =
(18) 式中:短幅系数Z b R r K 21=,i
b K K S θcos 2112
1-+=;Z R 表示针轮的分度圆半径;2b r 表示针轮的节
圆半径;2g r 为RV 轮的节圆半径;i θ、i b θ如图3(a )所示