AirMagnet_Survey_Pro_操作手册
无线地勘的知识和方法

穿透性
对于钢筋混凝土墙不建议隔墙覆盖。 对于普通砖墙,建议AP覆盖不超过2堵的穿射 对于玻璃墙,建议AP覆盖不超过4堵的穿射 对于木质墙体,建议AP覆盖不超过6堵的穿射 对于单独覆盖隔间较多的场所,建议将AP放于隔间门口
的吊顶处
安装位置
独立布放的AP位置最好高一些,以便在较高地方向下辐 射,减少障碍物的阻拦,尽量减少信号盲区
此类场所一般包括酒吧、咖啡厅、小会议室、居民家庭等。 对于居民家庭,需根据房屋布局来综合考虑AP的布点,以兼顾屋内各
房间的信号。
■ 需求及环境描述
某公司会议室长宽尺寸为15m×10m,可同时容纳30人开会,但 同时进行无线接入的用户数不超过20人,室内有吊顶。 问题:此场景,需要几个AP?
10m
无线的工程地勘是指在无线局域网规划和构建等的之前,
需要对无线局域网的现场环境进行工程地质勘察工作,无 线地勘的目的是,通过各种勘察手段和方法,调查研究和 分析评价建筑场地和地基的工程地质条件,为后期的无线 局域网的设计和施工,提供所需的无线环境的地质勘察资 料。
一、客户端的分布以及密度 必须通过实际走访的方式确认客户端的分布以及密度,不能想当然。
常损坏或丢失的情况发生 垂直范围内AP的合理规划,包括错开不同楼层间的AP规划
A
B
X
X
Office
Office AP
Laboratory
C X
D
DownΒιβλιοθήκη UpEXX
F X
Up
Lobby
櫃
檯
G X
Meeting Demo
Room
Room
H X
男用
化妝室
茶水間
女用
化妝室
()地测空间管理信息系统使用手册

山西潞安环保能源开发股份地测空间管理信息系统使用手册潞安环能股份北京大学遥感与地理信息系统研究所北京龙软科技开展2005年7月地测空间管理信息系统使用手册目录1.系统安装及相关说明............................错误!未定义书签。
1.1. 软件运行环境及安装.............................................................................. 错误!未定义书签。
1 .1.1.硬件环境............................................ ..............................................1 .1.2.软件环境............................................ ..............................................1 .1.3.软件安装............................................ ..............................................错误!未定义书签。
错误!未定义书签。
错误!未定义书签。
1.1.3.1.地质图形系统............................................. ...............................................错误!未定义书签。
1 .1.3.2.测量图形系统............................................. ...............................................错误!未定义书签。
1 .1.3.3.素描及回采工作面图形系统............................................. .......................错误!未定义书签。
注册表Air质量监测仪Model 1510快速启动指南说明书

Registrador de Calidad de AireModelo 1510Guía de Inicio RápidoESPAÑOLCertificado de Conformidad Chauvin Arnoux®, Inc. d.b.a. AEMC® Instruments certifica que este instrumento ha sido calibrado utilizandoestándares e instrumentos trazables de acuerdo aestándares internacionales.AEMC garantiza el cumplimiento de las especificaciones publicadas al momento del envío del instrumento.Para certificados de calibración con data trazable al N.I.S.T. contacte a fábrica solicitando una cotización. AEMC recomienda actualizar las calibraciones cada 12 meses. Contacte a nuestro departamento de Reparaciones para obtener información e instrucciones de cómo proceder para actualizar la calibración del instrumento.Para completar y guardar en archivo:Nº de serie: ____________________________Nº de catálogo: ______________________________Nº de modelo: 1510Fecha de recepción:_______________________Fecha de vencimiento de la calibración: ___________Chauvin Arnoux®, Inc.d.b.a AEMC® InstrumentsGracias por comprar el Registrador de Calidad de Aire Modelo 1510. Para obtener los mejores resultados de su instrumento recomendamos:⏹leer atentamente estas instrucciones de funcionamiento⏹cumplir con las precauciones de usoSímbolos utilizados en esta guíaADVERTENCIA, ¡riesgo de PELIGRO! El operador debeconsultar estas instrucciones siempre que aparezca este símbolode peligro.Información o consejo útil.Batería.Imán.El producto ha sido declarado reciclable tras el análisis de suciclo de vida, de acuerdo con la norma ISO14040.AEMC ha adoptado un enfoque de diseño ecológico paradiseñar este aparato. Analizar su ciclo de vida completo nos hapermitido controlar y optimizar los efectos del producto en elmedio ambiente. Este instrumento en particular excede losrequisitos de regulación con respecto al reciclado y lareutilización.Indica conformidad con las directivas europeas y con lasregulaciones aplicables a EMC.Indica que, en la Unión Europea, el instrumento debe sometersea eliminación selectiva conforme a la Directiva RAEE 2002/96 /CE. Este instrumento no debe ser tratado como desechodoméstico.PRECAUCIONESEste instrumento cumple con la norma de seguridad IEC 61010-2-030, para tensiones de hasta 5 V con respecto a tierra. El incumplimiento de las siguientes instrucciones de seguridad puede provocar descargas eléctricas, incendios, explosiones y daños en el instrumento y / o en la instalación en la que se encuentre.⏹El operador y / o la autoridad responsable deben leer detenidamente ycomprender claramente todas las precauciones que deben tomarseantes de utilizar el instrumento. Para utilizar este instrumento, esimportante tener conocimiento cabal de los riesgos eléctricos implicados.⏹Observe las condiciones de uso, incluyendo la temperatura, la humedadrelativa, la altitud, el grado de contaminación y el lugar de uso.⏹No use el instrumento si parece dañado, incompleto o mal cerrado.⏹Antes de cada uso, verifique el estado de la carcasa y los accesorios.Cualquier artículo cuyo aislamiento esté deteriorado (inclusoparcialmente) se debe retirar para ser reparado o desechado.⏹No tome medidas en conductores energizados. Use un sensor sincontacto o aislado adecuadamente.⏹Utilice siempre equipo de protección personal (EPP), en particular guantesaislantes, si existen dudas sobre los niveles de tensión a los que estáconectado el sensor de temperatura.⏹Todas las localizaciones de fallas y verificaciones metrológicas debenser realizadas por personal capacitado y autorizado.PREPARACIÓN INICIALInstalación de las baterías1. Presione y levante la tapa del compartimento de las baterías.2. Retire la tapa.3. Inserte las baterías nuevas asegurándose de que la polaridad estécorrecta.4. Presione la tapa hasta obtener un cierre total.Conexión a la computadoraAlgunos parámetros del Modelo 1510 (por ejemplo, unidades de medición y ajustes de mediciones MIN MAX) se pueden configurar mediante el teclado del instrumento. Hay otros parámetros que para su configuración se requiere que el instrumento esté conectado al software DataView®. (Para obtener instrucciones detalladas de configuración, consulte el Manual de Usuario en el pendrive USB incluido con el instrumento.)Para conectar el Modelo 1510 a su computadora:1. Instale el software DataView®, asegurándose de seleccionar la opciónde Panel de Control para Data Logger (estará seleccionada de formapredeterminada). No seleccione los Paneles de Control parainstrumentos que no necesite.2. Reinicie la computadora después de la instalación si se le solicita.3. Conecte el instrumento a la computadora mediante el cable USB oBluetooth.4. Espere a que los controladores se instalen. Los controladores seinstalan al conectar el instrumento a la computadora por primera vez.El sistema operativo de Windows mostrará mensajes indicando que lainstalación se ha completado.5. Inicie el Panel de Control para Data Logger presionando dos vecesseguidas el ícono de acceso directo de Data Logger en la carpetade DataView que fue colocada en el escritorio de su computadoradurante la instalación.6. Seleccione Instrumento en la barra de menús, y luego elija Agregarun Instrumento.7. Aparecerá el cuadro de diálogo de Add an Instrument Wizard. Lossiguientes cuadros de diálogo lo guiarán por el proceso de conexión delinstrumento. El primer cuadro le solicitará que seleccione el tipo deconexión (USB o Bluetooth). Elija el tipo de conexión y presione elbotón Siguiente.8. Si el instrumento ya ha sido identificado, presione Terminar. Elinstrumento se comunicará con el Panel de Control.9. Al terminar, el instrumento aparecerá bajo la Red Data Logger en elmarco de Navegación, con una marca de verificación verde indicandoque se logró la conexión.Ajuste del reloj del instrumentoAjuste el reloj del instrumento para asegurarse de que las estampas de tiempo de las mediciones registradas sean precisas. Siga los siguientes pasos:1. Seleccione el instrumento bajo la Red Data Logger.2. En la barra de menús, seleccione Instrumento. En el menúdesplegable que aparece, seleccione Configurar fecha/hora.3. Aparecerá el cuadro de diálogo de Fecha/Hora; complete los campos.Si necesita ayuda, presione F1 en el teclado de su computadora.4. Al terminar de ajustar la fecha y hora, presione Aceptar para guardarlos cambios en su instrumento.CONFIGURACIÓN DEL INSTRUMENTOAdemás de ajustar el reloj del instrumento, otras tareas básicas de preparación incluyen:⏹Habilitar Bluetooth⏹Seleccionar la unidad de medición de temperatura⏹Activar / desactivar la alarma acústicaCada una de estas tareas se puede realizar directamente en el instrumento o mediante el software DataView. Para obtener información detallada sobre la configuración del instrumento mediante el Panel de Control de DataView para Data Logger, presione el botón Ayuda en la barra de menús del Panel de Control.Para realizar estas tareas directamente en el instrumento, siga las siguientes instrucciones.Habilitación de BluetoothRealice una pulsación larga (> 2 segundos) en el botón , para habilitar/deshabilitar Bluetooth.Selección de unidad de temperaturaRealice una pulsación larga en el botón para alternar entre °F y °C. Activación de la alarma acústicaPresione el botón ; mientras lo mantiene apretado, presione el botón . El ícono aparecerá en la pantalla del instrumento.OPERACIÓNLectura de mediciones1. Posicione el instrumento en la ubicación que desee medir.2. Si el instrumento está apagado, presione y sostenga el botón hastaque se encienda. Después de unos momentos, el instrumento mostrará la medición de CO2.3. Para mostrar la temperatura y la humedad junto con el CO2, presione dosveces seguidas el botón . El símbolo 3D aparecerá en la pantalla.4. Para cambiar la unidad de medición de temperatura, realice unapulsación larga en el botón . El instrumento continuará utilizando launidad seleccionada la siguiente vez que se encienda.Modo ECO (ahorro de energía)El modo ECO ahorra energía cuando el Modelo 1510 mide la calidad de aire durante un período largo. La retroiluminación y la alarma acústica permanecen desactivadas, y el CO2 se mide sólo una vez cada 10 minutos. Esto ayuda a ahorrar baterías. Además, el instrumento automaticamente opera en modo de “reposo” entre 4:30 p.m. y 8:30 a.m. Estas horas se pueden ajustar utilizando el software DataView.1. Realice una pulsación larga en el botón para activar el modoECO. El símbolo ECO aparecerá en la pantalla.2. Realice una pulsación larga en el botón por segunda vez paravolver a la operación normal.Registro de medicionesSe puede iniciar y terminar una sesión de registro directamente en el instrumento. Los datos registrados se almacenan en la memoria del instrumento, y se pueden descargar y visualizar en una computadora que tenga instalado el Panel de Control de DataView para Data Logger.Se puede iniciar una sesión de registro manual en cualquier modo exceptoen P_REC (registro programado). Una vez iniciado un registro, no será posible cambiar el modo de operación.1.Realice una pulsación larga en el botón REC para iniciar un registromanual. El símbolo M_REC se mostrará en la pantalla.2.Realice una pulsación larga en el botón REC por segunda vez paradetener el registro.Para programar sesiones de registro, y descargar y visualizar los datos registrados, vea la Ayuda del Panel de Control de DataView para Data Logger.Reparación y calibraciónPara garantizar que su instrumento cumpla con las especificaciones de fábrica, le recomendamos enviarlo a nuestro centro de servicio una vez al año para que se le realice una recalibración, o según lo requieran otras normas o procedimientos internos.Para reparación y calibración de instrumentos:Comuníquese con nuestro centro de servicio para obtener un número de autorización de servicio (CSA). Esto asegurará que cuando llegue su instrumento, se rastree y se procese oportunamente. Por favor, escriba elnúmero de autorización en el exterior del embalaje. Si el instrumento se devuelve para que se le realice una calibración, necesitamos saber si se desea una calibración estándar o una calibración trazable al N.I.S.T. (incluye certificado de calibración más datos de calibración registrados).América Norte / Centro / Sur, Australia y Nueva Zelanda:Envíe a: Chauvin Arnoux®, Inc. d.b.a. AEMC® Instruments15 Faraday DriveDover, NH 03820 USATeléfono: +1 (603) 749-6434 (Ext. 360)Fax: +1 (603) 742-2346 ó (603) 749-6309Correo electrónico: ***************(O contacte a su distribuidor autorizado.)Contáctenos para obtener precios de reparación, calibración estándar y calibración trazable al N.I.S.T.NOTA: debe obtener un número de CSA antes de devolver cualquier instrumento.Asistencia técnica y de ventasEn caso de tener un problema técnico o necesitar ayuda con el uso o aplicación adecuados de su instrumento, llame, envíe un fax o envíe un correo electrónico a nuestro equipo de asistencia técnica:Contacto: Chauvin Arnoux®, Inc. d.b.a. AEMC® InstrumentsTeléfono: +1 (603) 749-6434 (Ext. 351 – inglés / Ext. 544 español)Fax: +1 (603) 749-6309Correo electrónico: ********************NOTAS1001/1999-MAN 100488 v1Chauvin Arnoux®, Inc. d.b.a. AEMC® Instruments15 Faraday Drive • Dover, NH 03820 USATeléfono: +1 (603) 749-6434 • Fax: +1 (603) 749-6309。
阿尔法航海 G MKR056 航向指示仪安装与使用手册说明书
ALPHACOURSE G/MKR056 Analogue heading indicatorInstallation & Operation manualALPHATRON MARINE B.V. Schaardijk 233063 NH ROTTERDAM The NetherlandsTel: +31 (0)10 – 453 4000 Fax: +31 (0)10 – 452 9214P.O. Box 2100033001 AA ROTTERDAM The information in this Manual is subject to changewithout notice and does not represent a commitment on the part of ALPHATRON MARINE B.V.Document : Manual Alphacourse G/MKR056 Issue : 1.1Table of Contents:1Revision history (5)2Introduction (6)3Definitions and abbreviations (7)3.1Definitions (7)3.2Abbreviations used in this manual (8)4Installation (9)4.1Delivered hardware (9)4.1.1Hardware Alphacourse G (9)4.2Dimensions Alphacourse G (10)4.3Mounting Alphacourse G (11)4.4Connecting hardware (11)4.4.1Connecting Alphacourse G (12)4.4.1.1Preparing and terminating the cables (12)4.4.1.2Grounding the Alphacourse G (13)4.4.1.3Connecting power supply Alphacourse G (13)4.4.1.4Connecting Alphacourse G to serial data source (14)5OPERATING Alphacourse G (15)5.1Operation ESSENTIALS (15)5.2SYNC button (15)5.3Dimmer knob (15)5.4OPERATING MODES (15)5.4.1Normal operating mode (16)5.4.2Alarm mode (16)6COMPASS SAFE DISTANCE (18)7TECHNICAL SPECIFICATIONS (18)7.1ELECTRICAL SPECIFICATIONS (18)7.2ENVIRONMENTAL SPECIFICATIONS (18)7.3MECHANICAL SPECIFICATIONS (18)8TECHNICAL SUPPORT (19)9Appendix 1: Connection diagram (20)10Notes: (21)Figures and tables:Figure 1: Hardware of the Alphacourse G (9)Figure 2: Mechanical dimensions (10)Figure 3: Possible mounting positions (11)Figure 4: Location of connector on back side of the Alphacourse G (12)Figure 5: Correct grounding of the instrument (13)Figure 6: Dipswitch setting Alphacourse G (14)Figure 7: Operation knops of Alphacourse G (15)Figure 8: Operating elements Alphacourse G (16)Table 1: Error codes Alphacourse G (17)CAUTION!DO NOT modify this equipment in any way without obtaining a written permission from ALPHATRON MARINE otherwise you will void the warranty.CAUTION!This product is only to be installed by a certified installation company either approved by ALPHATRON MARINE B.V or by one of its distributors, otherwise you will void the warranty. This product must be installed according to the prescribed installation methods in this manual, otherwise you will void the warranty.CAUTION!The ALPHACOURSE G contain no operator serviceable parts. Service and repair shall only be done by trained and certified personal.Nothing from this manual may be copied, multiplied or published by means of press, photocopy, microfilm or any other way, without written consent beforehand by Alphatron Marine B.V.Even though this manual has been composed with the utmost care, no rights can be derived on the content of this manual.1Revision historyREVISION DATA COMMENTV1.0 22-09-2008 Document draft.V1.1 11-01-2010 Changed/updated appendix connection diagram2IntroductionThe Alphacourse G/MKR056 is a analog heading indicator, designed to indicate a ships (true)heading in respect to the geographical(true) North of the earth. The Alphacourse has a standardized IEC-61162-1(NMEA0183) data-input for receiving true-heading serial data. From now on the Alphacourse G/MKR056 will be called “Alphacourse G”.3Definitions and abbreviations3.1DefinitionsGyro compassthis is a compass that finds true north by using an (electrically powered) fast-spinning wheel and friction forces in order to exploit the rotation of the Earth.LED’sLight emitting diodes, these are used for signaling statuses of hardware and signals to the user.IEC61162-1/NMEA dataProtocol/standard for transmitting and receiving of asynchronous serial data sentences. grounding point/studPoint on the chassis of the instrument which should be connected to the ships mass. (galvanic)isolatedElectrically separation of two circuits. There is no current flowing directly from one circuit to another. Electrical energy and/or information can still be exchanged between the sections by other means, such as induction or optical means(think of transformers or optocouplers).baudrateThis is the transmission speed of serial interfaces in bits per second.compass save distanceThis distance determines the distances above which equipment will not cause an unacceptable deviation of the ship's standard and steering compasses.true-headingHeading relative to true north of the earth3.2Abbreviations used in this manualA AmpereDC Direct currentGPS Global positioning systemGyro GyrocompassI/O Inputs and OutputsLED Light emitting diodemA mill amperesmm millimeterNMEA National Marine Electronics Association PCB Printed circuit boardVDC Volts direct currentW Watt4InstallationIn this chapter the hardware and the installation of the Alphacourse G are discussed. Please be advised to strictly meet the prescribed installation methods. If the Alphacourse G is not installed according to the prescribed installation methods it will possible not meet to the specifications.The Location class/category of the Alphacourse G/MKR056 is:Protected from the weather (formerly class B)4.1Delivered hardwareIn this chapter the delivered hardware will be discussed.4.1.1Hardware Alphacourse GThe hardware of the Alphacourse G consists of the following parts:Analogue heading indicatorCable 1x5x0.75mm2, Length 3mFigure 1: Hardware of the Alphacourse GInstallation & Operation manual Alphacourse G Issue 1.14.2Dimensions Alphacourse G The physical dimensions of the Alphacourse G are:Figure 2: Mechanical dimensions There is also a dimensional drawing in the appendix of this document.Alphacourse G/MKR05610 104.3Mounting Alphacourse GThe Alphacourse G can be installed a number of different ways; horizontally, vertically as well as at an angle. The possible positions are shown in figure 3. Do consider the placing of the Alphacourse G carefully. Make sure that there is enough room left for the connecting of the cables.Please also consider the right position/angle for mounting the Alphacourse G in which maximum visibility for the user can be achieved.Figure 3: Possible mounting positions4.4Connecting hardwareIn this chapter the connecting of the Alphacourse G is explained.NOTE: Use only recommended cable as described in the cable diagram in the appendix.NOTE: Install the Alphacourse G according to the prescribed installation methods in this manual.4.4.1Connecting Alphacourse GThe Alphacourse G has one internal connector located on the back side of the instrument. This connector is for connecting both power supply and serial data input to the instrument. It has 6 terminals with the following functions:Serial input:1.GND2.RX-(SDB)(RS485)3.RX+(SDA)(RS485)Power supply input:4.0V5.GND(DO NOT USE)6.24VDC inputNOTE: terminal 5 should not be used for powering the instrument only terminals 4 and 6 should be used for this.Figure 4: Location of connector on back side of the Alphacourse G4.4.1.1Preparing and terminating the cablesFor the instrument to operate correctly it is essential that all cables are installed and terminated correctly. The Alphacourse G comes with a pre-installed cable with a length of 3 meters. This cable is already connected and mounted on to the Alphacourse G’s back side. It is highly recommended to use this cable and to connect it in a external connection box to the installed cable(s) on the ship. See also figure 4 and the complete connection diagram that can be found in the appendix of this manual.4.4.1.2Grounding the Alphacourse GThe instrument must be grounded to the ships structure/mass to operate correctly. There is a grounding point on the back of the instrument on the right of the internal connector.Via the green wire in the pre-installed cable this grounding point should be connected to the ships structure/mass. See Figure 5: Correct grounding of the instrumentFigure 5: Correct grounding of the instrument4.4.1.3Connecting power supply Alphacourse GThe Alphacourse G must be connected to a 24VDC power supply that can supply at least 0.75 ampere. Connector terminals 4 and 6 should be used to connect the power supply. The polarity of the power connectors is shown on both the printed circuit board and the connection label on the back of the instrument. The maximum core thickness that can be connected is 2.5mm². The power supply input is galvanic isolated.The complete connection diagram of the Alphacourse G is included in the Appendix of this manual.4.4.1.4Connecting Alphacourse G to serial data sourceVia the terminals 2 and 3 serial data can be connected to the Alphacourse G. This data should comply with the IEC61162-1 norm. The by the Alphacourse G accepted sentence is:Via dipswitches inside the Alphacourse G the type of data source should be selected. To change the dipswitch settings the (back-side)housing of the Alphacourse G should be opened. Via the dipswitches there are three selectable data source types, these are: -HE -> Gyrocompass-HC -> Magnetic compass-GP -> GPS compassVia the dipswitches one of these data source types can be selected at a time. See figure below for the location of the dipswitches and the configuration settings.Figure 6: Dipswitch setting Alphacourse GBy default the Alphacourse G is set to:-4800 bps(Baudrate)-Accepted sentence: $HEHDT5OPERATING Alphacourse GIn this section the operating of the Alphacourse G is explained.5.1Operation ESSENTIALSFor operation, the Alphacourse G has one push-button(SYNC) and one rotatingknob(Dimmer).Figure 7: Operation knops of Alphacourse G5.2SYNC buttonWith the SYNC button the user can calibrate the analogue indicator of the Alpgacourse G. Once pushed on this button both analogue scales(inner and outer) will turn to zero and calibrate them selfs. During calibration the green RUN let will blink. After calibration the indicator will turn to the heading received on the serial input port.5.3Dimmer knobThe brightness of the backlight of the instrument can be set by rotating the dimmer knob. Turning clock-wise will increase brightness and turning anti-clock wise will decrease the brightness.5.4OPERATING MODESThe Alphacourse G has two working statuses:1.Normal mode2.Alarm mode5.4.1Normal operating modeDuring normal mode the Alphacourse G will indicate the ships heading with one decimal accuracy. The “outer” analogue scale will indicate the heading without decimals, 0 till 360degrees per revolution). The “inner” scale will indicate only the heading part of one decimal in front and one decimal behind the comma.If the instrument is powered the green RUN LED is lit. When the instrument is calibrating(directly after start-up or via SYNC button) the green LED will blink. See figure above.5.4.2Alarm modeWhen the instrument has detected an error the red fail LED is lit or will blink.NOTE: most of the errors are related to wrong serial data received on the serial input. Check the wire polarity and the dipswitch setting in the Alphacourse G. The type of error indicated by the instrument can be found in Table 1: Error codes Alphacourse G.Table 1: Error codes Alphacourse GIf the optical sensor is broken the analogue pointer can be calibrated manually. This has to be done in the following way.It is possible to adjust the null point manually when the automatic calibration fails. The procedure is as follows:1.Push SYNC button for more than 2 seconds.2.Push SYNC button(The analogue scales will turn around rapidly)3.Push SYNC button when the outer scale value is within 0 till 10 degrees(roughadjustment) The compass will start to turn slowly now.4.Pus SYNC button when the compass inner scale aligns with the 0 degrees lubbermark.(fine adjustment)After 3 seconds the fail indicator LED will be turned off and the Alphacourse G should indicate the same heading as the ships master compass. CHECK if this is soIf there is still a miss-alignment than repeat the above procedure till there is no difference between the master compass and the Alphacourse G.6COMPASS SAFE DISTANCEThe magnetic compass save distance of the Alphacourse G is given below:STANDARD MAGNETIC COMPASS: 0.8mSTEERING MAGNETIC COMPASS: 0.8m7TECHNICAL SPECIFICATIONSIn this chapter the technical specifications of the Alphacourse G are given. The technical specifications are divided into electrical, environmental and mechanical specifications. 7.1ELECTRICAL SPECIFICATIONSElectrical:Parameter Value CommentsOperating voltage 18-36 Volts DC voltagePower consumption 0.6A maxReverse battery protection No Automatic fuse will tripOutput(s) NoSafe compass distance 0.8 meter7.2ENVIRONMENTAL SPECIFICATIONSEnvironmental:Parameter Value CommentsOperation temperature -10°C to +50°CStorage temperature -10°C to +50°C7.3MECHANICAL SPECIFICATIONSMechanical:Parameter Value Comments Size 200x210x141mmWeight 2.7 Kg8TECHNICAL SUPPORTPlease contact Alphatron Marine B.V. for technical support regarding the ALPHACOURSE G:Alphatron Marine BVSchaardijk 233063NH, RotterdamP.O. Box 21003The NetherlandsTel: 0031(0)10 4534000Fax: 0031(0)10 4529214***************************A l p h a c o u r s e G /M K R 056I n s t a l l a t i o n & O p e r a t i o n m a n u a l A l p h a c o u r s e G I s s u e 1.120209 A p p e n d i x 1: C o n n e c t i o n d i a g r a m10Notes:- this page is intentionally left blank -。
苏州一光A_F系列接收机静态测量快速手册V2.32

A_F系列接收机静态测量快速操作手册V2.3静态测量实际意义:通过2个以上已知坐标的控制点。
外业使用3台以上GPS接收机架设在2个已知控制点和其他未知待测点上同步进行超过30分钟卫星信号记录。
内业将数据导出后(有的还要通过数据转换软件转成GPS后处理软件通用RINEX格式)通过后处理软件解算出其他待测点的坐标位置, 一般用于控制点高精度测量。
静态布网搬站方式1、在不超过20公里的半径范围内,可以选择该段内相距10公里左右的两个待测点作为参考点,这两个点对空一定要开阔无遮挡,且附近较少电磁或者矿磁干扰。
2、将两台接收机架设在这两个点上,从一开始记录静态数据就不停止采集,直至结束。
将其余几台机器在其他待测点及已知点上,按照路程方便,依次搬站直至测完全程,每站建议测量45-60分钟为佳。
3、每次测量需要保证搬站的机器和保持不动的机器有30分钟以上共用时长,所以两台不动的主机一旦需要更换电池,需要先跟搬站的机器联系好,一起行动。
4、如果全程超过20公里,可以采用分段法,将全程分为多个5-10公里段,每段2个参考点,先将所有参考点和已知点一起,采用递推的方式联测一遍,(递推法就是先将A、B、C三点测一个时段,然后A点主机搬到D点测一个时段,然后B点主机搬到E点测一个时段,依次类推,直至测完所有点。
如果有3台以上的接收机可用,每次需要保持两台不动,其他的滚动往前搬站即可。
)然后再根据参考点将全程分为多段,按照上述1、2的方法测出加密点,最后将所有测量数据(递推的和加密的)导入同一个项目解算即可。
这样做的好处是:1、两个参考点虽然是待测点,没有已知坐标,但也可以通过其他已知点推算出坐标,然后在推算出其他待测点。
但这两个参考点条件比较好,遮挡少,便于解算,提高精度。
2、两个参考点具有一定的跨度,能减少短边推算长边带来的误差。
3、两个固定参考点与搬站点联测,比以往递推方式减少了测环的严格性,但由于测距较短,误差也不会太大,并且也不会因为其中个别站点测量信号不好无法解算,而导致整网无法递推解算。
雷达软件操作说明

注册号
PUP 软件的主要设置 (1)设置通信配置文C:\Windows\NBCOMM.INI
PUP 与UCP 之间的通信,是通过窄带通信配置 NBCOMM.INI来控制,相应地UCP 也有NBCOMM.INI配置 文件,预报员通常是将UCP 与PUP 安装在同一台电脑, 则需要将UCP 和PUP 的Nbcomm.ini 配置文件设置为同一 个文件,其通信配置内容如图:
UCP 软件的安装与设置
(6)设置通信配置文件C:\Windows\NBCOMM.INI UCP 生成的雷达产品如何发送到PUP 产品显示 终端,是通过窄带通信配置文件Nbcomm.ini来控 制,相应地PUP 也有Nbcomm.ini 配置文件,预报 员通常是将RPG 与PUP 安装在同一台电脑,则需要 将RPG 和PUP 的Nbcomm.ini 配置文件设置为同一 个文件,其通信配置内容如图:
文件名
UCP/RPG.exe RPG执行程序
说明
RPG配置问件,指定与RPG相连的RDA机器的 主机名 RPG配置文件,可设定基数据实时处理和回放处 理路径 RPG与PUP计算机通讯配置文件 适配参数文件,算法及环境参数配置文件 RPG近期的日志文件 RPG运行当天的日志文件
一. UCP 软件的安装与设置 二. PUP 软件的安装与设置
点的数目 经度
PUP底图本地化
3 130.000 130.000 128.000 1
底图放大几倍时显示,1、2、4、8、16
方法一、使用Maps目录下的UserMap.dat或UserMap.txt,格式如下:
35.000 37.000 37.000
纬度
对于单点:
1 1 2 27.700 27.930 冷水江 韶山
WLAN Survey勘测仪使用
图1-1
4
软件安装及注册 4. 点选Next,出现AirMagnet
5.
6.
Survey授权码同意书界面,请参 考图1-2 点选Yes ,确认授权码同意书后, 进入选择安装目的文件夹界面, 请参考图1-3 选择缺省或指定安装路径后点选 Next
图1-2
图1-3
5
软件安装及注册
7. 8.
9.
选择授权码安装方式,请参考图1-4 点选Next,进入安装信息确认界面, 请参考图1-5 点选Yes,进入下载授权码界面,请 参考图1-6 图1-4
图1-5
6
软件安装及注册
10.
选择获取授权码的方式后,点选Next(初次 安装,请选择从下载)
11.
输入AirMagnet提供的产品序号(Serial Number)、产品密钥(Serial Key)、安装 的无线网卡类型并确认网卡MAC地址是否正 确,请参考图1-7
E
D
18
现场数据采集-查看覆盖模型
A:点击“Display”即可查看测试完成的覆盖模型 可以选择按照信道或者SSID或者某一个AP查看覆盖模型
A
19
培训内容
软件安装及注册 • 现场数据采集 • 数据分析
•
20
数据分析-信号强度
A:进入“Airwise”专家系统模式,选择分析SSID为”chinanet”信号 B:点击“signal Coverage” C:输入不同的门限值(如-70、-60、-50等)即可在评分内得到不同强度的 得分,以此推算数各个信号强度所占百分比
15. 16.
点选OK。确认安装信息,请参考图1-10 进行AirMagnet Survy/Panner系统安装, 请参考图1-11 点选Finish,完成AirMagnet Survy/Panner系统安装
AMM手册查询教材R1

AMM手册查询1AMM手册概述1.1 用途飞机维护手册(Aicraft Maintenance Manual,AMM)提供航线和定检维护时所需要的详细技术信息,包含系统及部件的工作描述、勤务、修理、更换、调节、检查的必需信息和正常在停机坪或维护机库完成飞机检查所需要的工具设备。
该手册可以用来满足维修人员工作和培训的需要。
1.2 手册有效性1.2.1客户化手册任何维修文件都有有效性(Effectivity),也就是此文件的适用性,即该维修文件是针对哪种机型制定的,对哪些飞机有效。
一般定义为:维修文件的有效性是指该文件是否适用于指定飞机及机载设备的依据。
维修文件对应飞机的有效性可以体现在以下4个方面:客户化(机型、机队有效性)、飞机型别号码(单架飞机的有效性)、型别特征(装备系统、APU、发动机的有效性)、时效性(手册改版的有效性)。
AMM手册为客户化的手册。
通过FSN(机队序列号)来确定有效性。
1.2.2飞机识别号一架飞机从设计、实验、成批的生产到投入运行,过程是非常复杂的,也是非常严谨的,每一个过程都会有一些代表该过程的编号,这些编号用以对机型进行识别,同时,也用来确定各类手册、服务通告、适航指令等的有效性。
在各手册前言都有飞机有效性对照表,以方便用户查询手册时了解手册有效性。
1.2.3空客飞机有效性对照表A.机队序列号(Fleet Serial Number,FSN) 航空公司机队的飞机按照顺序编号,如:001、002。
B.飞机构型(Version Rank) 如:G8E01 0010、G8E01 0011。
C.飞机型号(Model) 如:320-214。
D.厂家序列号(Manufacturer Serial Number,MSN) 某一机型持续生产的编号,如:0772、0799。
E.注册登记号(Registration)如:B-2360、B-2361。
1.2.4手册修订AMM手册修订分为:定期修订临时修订TR临时修订的内容包含在List of Effective Temporary Revisions(LETR)中,客户可以通过Airbus-World 和CD的形式获得最新的临时修订,在收到临时修订后应尽快将其上传至AirNav/Maintenance中。
Rapiscan 618XR hp 机场安全检测系统说明书

A D V A N C E D T E C H N O L O G Y F O R A S A F E R W O R L DRAPISCAN 618XR hpHigh PerformanceThe new Rapiscan 618XR hp is a high performance 21.3 x 14.2 in (540 x 360 mm) tunnel aviation checkpoint screening system with best in class image quality and excellent threat detection capabilities.SINERGY™, Rapiscan’s latest proprietary image enhancement tool, utilizes the new innovative dual-mode X-ray imaging technique (DMxT) to emphasize the detail in specific regions of images by enhancing the visibility of thin metaltherefore increasing operator recognition of potential threats in cluttered imagesThe Rapiscan 618XR hp complies with all European Commission Aviation Security Screening requirements and French Civil Aviation Authority (STAC).Detection of Explosives and Narcotics AlertTarget™ and NARCScan™ are designed to assist operators in the detection of a range of explosives and narcotics respectively in real time during the scanning process by marking a potential threat on the X-ray image.Rapiscan detection algorithms are based on regulatory material analysis techniques.Government Regulatory ComplianceRapiscan 618XR hp performance is in full compliance with the mandatory regulations (EC) No. 300/2008, (EU) No. 185/2010 and Commissions Decision C(2010)774 for aviation security in the European Union.Ease of use Providing Highest ThroughputWith over 14 image processing tools and detection alert algorithmsfunctions, the feature- rich software allows the operator to more easily and accurately search for contraband.SINERGY™Rapiscan’s latest proprietary image enhancement tool, utilizes the new innovative Dual-Mode X-ray imaging Technique (DMxT) to emphasize the detail in specific regions of images by enhancing the visibility of thin metal therefore increasing operator recognition of potential threats in cluttered images.Standard Features• Multi Energy Imaging (4 Color) • View Previous/Next Bag • Manual Image Archive• Configurable Image Processing Keys• Baggage Counter • Date / Time Display• Search Indicator• UPS (Uninterrupted Power Supply) • Flat Panel Monitor• Multi Language supportStandard Image Processing Functions• Crystal Clear™ • SINERGY™ • Black and White• Organic / Inorganic Stripping • Inverse Video • High Penetration • Low Penetration • Pseudo Color• Variable Edge Enhancement • Variable Color Stripping • Variable Gamma • Variable Density• Dynamic Continuous Zoom & Panning • Fixed Zoom (64x)Tunnel Opening 21.3 x 14.2 inLAURUS Systems, Inc. - Ph: 410-465-5558 - Fax: 410-465-5257 - LAURUS Systems, Inc. - Ph: 410-465-5558 - Fax: 410-465-5257 - Physical SpecificationsDimensions:Length: 65.4 in. (1,662 mm) Width: 28.9 in. (735 mm) Height: 53.8 in. (1,366mm)Tunnel Size:21.3 x 14.2 in (540 x 360mm)Conveyor Speed: 0.20 m/sec (39.4 ft./min)Conveyor Load: 364 lbs (165 Kg) evenly distributed Conveyor Height: 32.7 in. (830 mm) Approx Weight: Net: 970 lbs (440 Kg)System Power: 100/110/120//208/220/230/240 VAC ±10%, X-Ray Generator and Image Performance*Steel Penetration: 33mm typical, 31 mm standard Wire Resolution: 40AWG typical, 38 AWG standard Spatial Resolution: 0.8 mm vertical/0.8 mm horizontal Cooling:Sealed oil bath with forced air Anode Voltage: 140KVOrientation:Diagonally Upward Operating EnvironmentStorage Temperature: -4° to 122°F (-20° to 50°C)Operating Temperature: 32° to 104°F (0° to 40°C)Relative Humidity:5 to 95% non-condensing Protection ClassSystemIP20 Operator Control PanelIP432Government Regulatory- Regulation (EC) No. 300/2008 Compliant - Regulation (EU) No. 185/2010 Compliant- EU Commissions Decision C(2010)774 CompliantHealth and SafetyRapiscan Systems’ cabinet X-ray products comply with all applicable U.S. FDA and equivalent international regulatory agencyrequirements, contained in the cabinet X-ray radiation safety performance standard [21 CFR 1020.40] and the general performance standard [21 CFR Part 1010] as well as IEC standard 61010-2-091.Rapiscan baggage and parcel inspection systems radiation emission leakages are well below the required regulatory limits with less than 1μSv/hr at 10 cm from all surfaces of cabinet X-ray.Software• OS600• 64-bit Operating SystemOptions and Accessories• Explosives Detection Alert (Target™) • Narcotics Detection Alert (NARCScan™) • Density Threshold Alert (DTA) • Threat Image Projection (TIP)• Threat Image Projection Network (TIPNet) • Remote Image Archive Review (NETView™) • Multi-System Network Display Station (NDS) • Automatic Image Archiving • Enhanced Image Archiving• Operator Training Program (OTP) • Manual Scan• Operator Pedestal • Foot-mat• Optical Operator Presence Sensor • SmartCard Login • Power Conditioner • Conveyor Accessories • Remote Workstation• Universal Printer Support • Operator Control Panel• Bracket Mount Dual Monitor Kit • Extended Smart UPS1Stated performance as measured by Rapiscan Imaging Validation Test Kit. 2With optional replaceable cover.With continual development of our products Rapiscan Systems reserves the right to amend specifications without notice. Product pictures are for general reference. Please note that due to US laws and regulations, not all Rapiscan products are available for sale in all countries without restriction. Please contact your Rapiscan Systems sales representative for more information. Part Number | 618XRH140。
APM固定翼设置完整手册(方少版)

输入引脚供电,但输出引脚将需要自己的电源。如果你想在飞机上用两个独立的 电源,可以使用这种配置,一个为舵机供电,一个为其他电子设备供电。
APM2 设计要求一个清洁、良好滤波的电源。注意根据连接的插头不同,电压规 格要求是不同的。原因是有一个肖特基二极管(二极管 D1),防止 USB 端口在 连接时给 APM2 的 PWM 输出接口供电而损坏东西。因此,当 USB 未通电, 并通过 PWM 输出连接器连接电源时,横跨这个二极管有一些压降,所以要求更 高的输入电压来做补偿。因此,电力需求如下:跳线 JP-1 断开时,5.0VDC +/- 0.5V 到 PWM 输入接口。跳线 JP-1 连接时,5.37VDC +/- 0.5V 到 PWM 输出接口。
需要更快的设定及启动吗?这个导览提供了一个简单的方法。ArduPlane 还有许 多的功能需要设定,但这几篇文章可以让你尝鲜:
1. 安装驱动及 Mission Planner 2. 连接遥控设备 3. 首次设置 4. APM 开机和校准 5. 规划航点和任务
没关系,只要从 这里下载驱动程序,保存到电脑的一个文件夹里。
• 无内置电压监测。大多数人觉得电流监测比电压有用,所以我们现在推荐 Sparkfun 电流传感器,可插入到一个传感器的插座上。
APM 1 和 APM 2 的差别
APM 1 和 APM 2 之间的主要功能差异是传感器。 AMP 2 拥有先进的 InvenSense MPU-6000 陀螺仪/加速计芯片,它有自己的传感器融合处理器。它 还有一个测量海拔的高精度压力传感器。
还不要点击“Connect”! 请先将固件程序加载你的 APM。
飞马机器人 无人机管家 数据处理软件说明书

无人机管家数据处理软件说明书编制:深圳飞马机器人科技有限公司版本号:V0.1日期:2019-3-26目录1.概述 (1)2.配置与权限 (1)软件权限 (1)配置要求 (2)3.智检图 (2)3.1.功能说明 (2)3.2.智检图流程 (11)4.智理图 (26)4.1.GPS处理 (27)4.2.图像处理 (44)4.3.实用工具 (59)4.4.图像批处理 (73)4.5.常见问题 (73)5.智拼图 (75)5.1.功能说明 (75)5.2.快拼流程 (86)1.概述本文档主要讲述【无人机管家】软件各模块功能应用和对应不同飞机、不同需求所涉及的操作说明,包含功能介绍、数据获取后数据质检、数据预处理、数据快拼处理流程。
【无人机管家】是无人机数据获取、处理、展示、管理以及无人机维护的一站式智能GIS系统,支持固定翼、旋翼、复合翼等种类丰富的飞行平台,满足各种应用需求的航线模式,支持真三维地形数据的精准三维航线规划、三维实时飞行监控、快速飞行质检,具有功能多样化的数据预处理工具箱,支持稳健的精度控制和自动成图、丰富的4D和三维产品生产,以及无人机可视化监控中心,提供系统升级、智能维护、信息推送等云服务。
【无人机管家】软件主要模块分别为:【智检图】(数据检查)、【智理图】(数据预处理)、【智拼图】(DSM+TDOM、DOM、三维数据生产)、【智激光】(LIDAR数据生产)。
无人机管家除支持飞马系列获取的数据外,还支持大疆精灵4rtk、御2、等相机数据。
2.配置与权限软件功能权限软件权限配置:最低配置系统支持Widows7SP1(64)、Windows8(64)、Windows10(64)CPU Intel双核处理器内存RAM(8GB)显卡NVIDIA显卡、显存1GB及以上推荐配置系统支持Widows7SP1(64)、Windows8(64)、Windows10(64)CPU Intel Core i7处理器及以上内存64G、128G显卡NVIDIA显卡1080ti、显存2GB及以上配置要求管家界面3.智检图【智检图】是专业用于航飞质量现场检查及评估分析的自动化软件、可以快速获得航飞质量报告、提高无人机数据质检工序的效率及后期处理的可靠性。
Airmagnet WiFi Analyzer测试仪中文说明书

2008/8/26
图1-7
7
安装步骤
12.点选 Next,选择所安装之无线 网卡之厂牌及型号及国家, 请 参考图1-8。 (国家建议选择Un装,确认无线网卡 是否正确,请参考图1-9。
图1-9
2008/8/26 8
安装步骤
14.点选 OK。确认安装信息,请参考 图1-10。 图1-10
绿色 黄色 红色 灰色
5秒内有收到设备信号 5~60秒内收到设备信号 60秒以上未收到设备信号 300秒以上未收到设备信号
2008/8/26
33
系统功能
基础结构(Infrastructure)
~动态资料图~ 单一无线设备的即时动态曲线图,使用者可依所收集之位置,立即 分析出该设备信号强度、输入/输出封包…..等相关信息
2008/8/26
3
安装步骤
开始安装:
1. 安装 AirMagnet 所支持的无线网卡于笔 记型电脑中,或确认 AirMagnet 所支持 的内建无线网卡是否正常运作。 2. 将AirMagnet Laptop Analyzer 光盘于置 于光驱中,并且开启AirMagnet Laptop 资料夹。 3. 从AirMagnet Laptop 资料夹中,点选 Setup.exe。 安装画面,请参考图 1-1 。 图 1-1
设备干扰信息
2008/8/26
31
系统功能
干扰(Interference)
~RF 干扰频谱图~ 即时干扰频谱图,需同时搭配频 谱分析仪软件(Spectrum Analyzer ) 进行,此曲线图将有效记录环境中干 扰变化
紫色 最大值记录点 记录曾经在信 道中,所出现 过的干扰功率 最大值
2008/8/26
APM飞行前检查
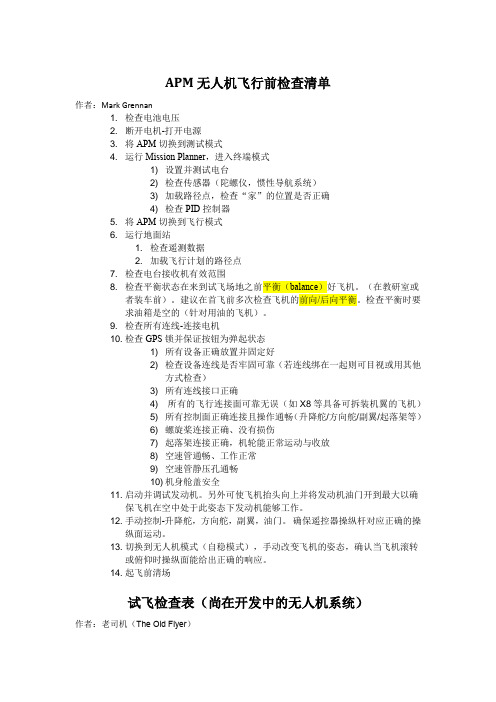
APM无人机飞行前检查清单作者:Mark Grennan1. 检查电池电压2. 断开电机-打开电源3. 将APM切换到测试模式4. 运行Mission Planner,进入终端模式1) 设置并测试电台2) 检查传感器(陀螺仪,惯性导航系统)3) 加载路径点,检查“家”的位置是否正确4) 检查PID控制器5. 将APM切换到飞行模式6. 运行地面站1. 检查遥测数据2. 加载飞行计划的路径点7. 检查电台接收机有效范围8. 检查平衡状态在来到试飞场地之前平衡(balance)好飞机。
(在教研室或者装车前)。
建议在首飞前多次检查飞机的前向/后向平衡。
检查平衡时要求油箱是空的(针对用油的飞机)。
9. 检查所有连线-连接电机10. 检查GPS锁并保证按钮为弹起状态1) 所有设备正确放置并固定好2) 检查设备连线是否牢固可靠(若连线绑在一起则可目视或用其他方式检查)3) 所有连线接口正确4) 所有的飞行连接面可靠无误(如X8等具备可拆装机翼的飞机)5) 所有控制面正确连接且操作通畅(升降舵/方向舵/副翼/起落架等)6) 螺旋桨连接正确、没有损伤7) 起落架连接正确,机轮能正常运动与收放8) 空速管通畅、工作正常9) 空速管静压孔通畅10) 机身舱盖安全11. 启动并调试发动机。
另外可使飞机抬头向上并将发动机油门开到最大以确保飞机在空中处于此姿态下发动机能够工作。
12. 手动控制-升降舵,方向舵,副翼,油门。
确保遥控器操纵杆对应正确的操纵面运动。
13. 切换到无人机模式(自稳模式),手动改变飞机的姿态,确认当飞机滚转或俯仰时操纵面能给出正确的响应。
14. 起飞前清场试飞检查表(尚在开发中的无人机系统)作者:老司机(The Old Flyer)无人机APM任务检查单飞行编号:日期:______ 飞行器:______________ 地点:___________________温度:______ 风速/风向:_____/_____ 云量:_________飞行前检查(在706完成)APM版本___________Mission Planner 版本___________HK GCS版本___________PID参数文件名称___________路径点文件名称___________注意: 提前清除(重置?)![ ] 在RC模式下,开启发射端、接收端(TX、RX)电源,按要求固定/连接[ ] APM切换到CLI模式(Mission Planner -> COM 4 - 115200 -> terminal USB)[ ]设置>清除>重置>电台(setup > erase > reset > radio)[ ] 清除所有日志文件(logs -> erase)[ ] 检查模式分配(setup -> modes)模式转换开关下______模式转换开关中______模式转换开关上______[ ] 检查数传电台(XBees)>用C-CTU检查数传电台的有效范围拔下USB插头(UN PLUG USB)[ ] APM切换到飞行模式-重置-观察LED亮起的顺序-等待GCS锁定APM启动Mega Planner端口选择COM5-频率选择57600-连接Planner切换到配置模式(Configuration Mode)[ ]打开参数文件列表Planner切换到Planner模式[ ] Planner >读取并检查路径点是否正确,若有误则加载路径点文件写入路径点Planner切换到飞行数据模式[ ]检查连接情况、地图、“家”[ ]将飞行模式由RC切换到STABILIZE或FBWA模式再切换到AUTO自动模式,检查飞行数据是否正确[ ]切换到STABILIZE或FBWA模式[ ]使飞机倾斜或俯仰,检查飞机操纵面运动方向是否正确[ ]切换到RC模式,检查操纵面和油门响应是否适宜HK GCS 飞行前检查(如果用到的话)[ ] 手机打开–连接笔记本电脑wifi[ ] 连接端口5(COM5),检查数据[ ] 在谷歌地图上显示:“飞跃点(Overhead)”“设置家(Set Home)”[ ]读取路径点-检查计划飞行路径[ ] 在GCS上显示:设置“家”的海拔、零度偏航角[ ] 转到数据文件(Data File)并输入文件名_________MEGA PLANNER(如果用到)[ ] 连接到端口5(COM5),检查数据[ ]飞行模式下检查地图[ ]检查“家”点-设置海拔高度飞机飞行前检查[ ] 安装机翼-连接皮托管[ ] 安装支柱(prop)[ ]检查并记录电池电压, 规格: ______/_______[ ]检查CG是否正确[ ]RC Transmitter set to proper aircraft/model BIND AS REQUIRED[ ]确认空速管和静压孔是否干净[ ]将模式从RC切换到STABILIZE再到AUTO-注意:切换到自动模式电机会开始工作!![ ] 将模式切换到STABILIZE或FBWA[ ]使飞机倾斜或俯仰,检查飞机操纵面运动方向是否正确[ ]切换到RC模式,检查操纵面和油门的RC响应是否合适[ ]检查航程[ ]开启GCS记录[ ]起飞并启动计时器-重置GCS计时器飞行后[ ]关闭记录器[ ]记录电池电压____________[ ] 记录飞行时间____________[ ] 检查并存储数据____________[ ] 存储参数配置文件____________任务日志飞行器构型:______________________与上次飞行相比飞行器所做的改动:_________________________________________ ______________________________________________________________________ 载荷:______________________________________________________________路径点文件:________________________________路径点描述:_______________________________________________________________________________________________________________________________ 任务目标:___________________________________________________________________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________ 飞行数据:_____________________________________________________________ ______________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________ 飞行任务总结分析:_____________________________________________________________________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________ 补充记录:______________________________________________________________ ______________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________无人机APM任务检查单飞行编号日期:______ 飞行器:______________ 地点:___________________温度:______ 风速/风向:_____/_____ 云量:_________任务目标:__________________________________________________________________________________________________________________________ _____________________________________________________________________ _____________________________________________________________________ _____________________________________________________________________飞行前检查(在706完成)APM版本___________Mission Planner 版本___________HK GCS版本___________PID参数文件名称___________描述:_______________________________________________________路径点文件名称___________描述:_______________________________________________________[ ] 电池充电[ ] 信号发射器(遥控器)充电[ ] 笔记本充电且所需参数文件和程序文件已正确加载[ ] MiFi充电(微型wifi?)[ ] 相机/ 第一人称视角(FPV)接收机充电[ ] 飞行器检查(地面滑跑)[ ] 载荷准备就绪到达试飞场地后检查清单[ ] 打开MiFi[ ] 打开笔记本电脑并运行Flight Planner (FP)[ ] 打开第一人称视角(FPV)接收机飞行器准备工作[ ] 遥控器“发动机熄火” 切换开关打开,且所有的切换开关处在飞行前设置状态下(增稳)[ ] 打开遥控器且设置到正确的飞行器模式[ ] 检查并记录电池电压,规格:______/_______[ ] 为飞行器供电- 确认接收机正确连接[ ] 电池电压监视器连接[ ] 将Planner连接到飞行器并确认参数是否已读取飞行器调试工作[ ] 按需将参数文件加载到飞行器[ ] 检查路径点和“家”是否正确-按需加载[ ] 检查飞行器的模式-至少每个模式切换一次观察数据窗口是否无误注意:自动模式下电机可能会开始工作!!飞行器飞行前准备[ ] 确认飞行器处在增稳状态固定翼飞行器[ ] 使飞机倾斜或俯仰,检查飞机操纵面运动方向是否正确[ ] 安装机翼,连接空速管[ ] 切换到手动模式,检查操纵面和油门响应是否合适[ ] 检查空速管和静压管是否干净[ ] 检查CG是否正确旋翼机[ ] 遥控器有效范围检查- 电池充电[ ] 确认GPS 锁定(未闪烁)[ ] 开启GCS记录[ ] 切换到增稳模式[ ] 发动机熄火开关关闭(对于旋翼机要注意这可能会使电机开始工作)[ ] 固定翼:启动发动机,暖机[ ] 打开相机开启飞行时间记录,起飞飞行后[ ] 断开电源,关闭遥控器[ ] GCS停止记录[ ] 记录飞行结束后的电池电压 ____________[ ] 记录飞行时长 ____________[ ] 检查并保存日志文件 ____________[ ] 保存参数文件 ____________[ ] 日志文档名 ____________任务日志飞行后分析:_____________________________________________________________________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________补充记录:______________________________________________________________________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________。
Spectra Precision Survey Pro软件及其他产品说明书

Survey Pro SoftwareSurvey Pro: Simply The BestIncludes Spectra Precision Central:Spectra Precision’s cloud computing solution.S U R V E Y P R Oit meets rigorous MIL-STD-810G military standard for drops, vibration, humidity and extreme temperatures, and with an IP67 rating, it’s designed to keep your investment and your data safe. The Ranger 3 comes standard with 8 GB of onboard memory for storing data. Move your data fast and easily using a SDHC card, Bluetooth, USB cable, Wi-Fi, or WWAN modem.military standards the Nomad uses a high capabilities like GPS, Wi-FiSpectra PrecisionT41 Data CollectorThe Spectra Precision® T41™ Data Collector is rugged, powerful, connected and compact,offering high performance with a highresolution outdoor readable display.The slim, ergonomic design is easy tohold and enables all-day use. A newcapacitive touch-screen protected byGorilla® Glass provides intuitive andresponsive finger-tip touch capability.The T41 handheld has 3.75G cellulardata capabilities plus cellular voice andSMS capabilities.Spectra PrecisionMM20 Data CollectorThe Spectra Precision® MM20 Data Collector delivers maximum performance and reliability in a lightweight but rugged design. It’s dust- and waterproof andweighs just 380 g (13 ounces) It featureslong battery life making it a perfect tool forlong surveying tasks. The MM20 provides Bluetooth, wireless LAN (WiFi), and GSM/GPRS/3.5G modem. Top that off with a 5Mpixel camera and built-in GPS, and you havea powerful, yet inexpensive tool.Spectra Precision CentralSpectra Precision Central provides a cloud computing hub for your complete survey team to connect and exchange information from anywhere there is a data connection. A cloud service is nothing more than internet accessible data storage. It’s how you access and use the data that is really the important part. Spectra Precision Central is designed for professionals who make their living outside, doing measurements, and building the world. The PartsWeb PortalThe web portal provides an easy way to edit, manage, and use your Central accounts and data. It can be accessed with any browser from your office computer, tablet, or smart phone.Smart Phone ApplicationsSurvey Pro Central for Android and Survey Pro Central for iOS provide access with dedicated smart phone and tablet apps. These apps provide data access and a range of functionality to help you manage your data, and therefore your workday, better. Spectra Precision Central SyncCentral Sync is a tool that runs as a service on your computer and synchronizes the data files that are placed in the Central folders. This makes file management and synchronizing data with Central very easy.Survey Pro IntegrationSurvey Pro is fully integrated into Spectra Precision Central. Files are uploaded as they are created. New data is sent up to Central based on user preferences. So now, not only do Spectra Precision ultra-rugged data collectors and dedicated field software protect your data, so does Central, backing it up on a remote server. See the Spectra Precision Central product brochure for more information.S U R V E Y P R OSetupSurvey Pro setup routines are designed to get you working as soon as possible. Multiple instrument setup options using known points or resection means you can work the way you need to work. Results are conveniently displayed making it easy to check the setup. All setup data is stored and is easily reviewed and edited as necessary using the integrated data editor. If an instrument height is updated, all affected coordinates will also be updated. Survey Pro puts you in control.GNSS SetupSurvey Pro provides two main methods of configuring a GNSS survey: Mapping Plane and Calibration. With these two methods, there is nearly infinite flexibility. Calibration allows you to use a local coordinate system, often set using total stations. This keeps everything aligned which makes you more productive. Survey Pro walks you through the process and provides check routines toensure everything is spot on.Feature and Attribute collectionYou can define features like “utility pole” and “water line” using feature codes in the field or in the office. Add features and attributes as you survey. Using line features, Survey Pro will automatically draw lines in real time making it easy to verify your work before leaving the job site. Process and adjust the data in Spectra Precision Survey Office and export tocommon data formats when you are done.COGO, Inverse, and CurvesSurvey Pro software provides powerful Coordinate Geometry (COGO), Inverse and Curve functions. The calculation tools give you the power to do just about anything in the field. The end result is more productivity.Spectra Precision CentralSpectra Precision Central is a cloudcomputing solution that provides real-time data upload, backup, and download along with the tools to easily access your data wherever you are. Central is fully integrated into Survey Pro making it easy to use.Survey Pro Central for Android and iOS are the perfect companion tools. These apps allow access to your Central account so you can manage your data from just about any smart phone. These apps come with your Spectra Precision Central account.Central also has a dedicated web portal giving you compete access and control over youraccounts and account data.Active MapsSeeing your data graphically helps speed your work and ensures there are no mistakes. Survey Pro provides several exciting map features for just this reason. Active Maps provide a way to do calculations or initiate measurements right from the map views. Tap on a point to stake it. Tap two points to compute the inverse. Or, enter Survey Mode and collect points seeing them appear on the map as they are measured. Active Background Maps provide a method of importing DXF files that can be used forcalculations or staking. Select a DXF line and offset points or stake it. You have full control of the DXF file layers; hide them, show them, or freeze them. See what you need to see,how you need to see it.Stakeout / LayoutSurvey Pro provides tools to complete your stakeout tasks more efficiently. Using anactive map view or interactive features, Survey Pro navigates you to the points you need to stake, when you need to stake them. Points are checked off as they are staked, preventing you from duplicating observations.Survey Pro stores all measurement data and any as-built or as staked points that are collected. This data can then be used for cut sheet reports using Spectra Precision Survey Office or XML Style Sheets to create reports on your data collector while still in the field.Stake DTM surfaces and use the data collected to compute volumes in the field. View the resultant DTM being staked in the field to determine where additional points might be needed. Survey Pro displays cut / fill information for any location on the DTM surface in real-time.S U R V E Y P R OPower FeaturesSurvey Pro continually improves withcapabilities that make your job easier, help you work more productively, and get the job done right. Some of the most recent feature enhancements include:• Data Management ControlFlexibility in data collection with the ability to edit survey data to fix entry errors or blunders and immediately get updated coordinates. Change a rod height and see the change cascade through the file with our enhanced dynamic file viewer/editor.• Active DXFSupport staking with DXF files to enable data flow from design software to your field crews, improving efficiency on the road or construction site. Import a DXF file as a background map to select objects like lines and nodes for staking or calculations. Survey Pro also provides control over the layers you are viewing and what layers you can select objects from allowing you to see what you need to see.• Optimized WorkflowSurvey Pro contains a user customizable Home screen enabling you to configure your favorite choice of field processes to expedite your daily workflow. Easily switch between functions by selecting the home screen and choosing your next action. Also use the graphical Active Survey map screen to speed your activities. For example, tap and hold to create new points, then select your points and switch to your graphical stakeout screen to complete the task. Also, the customizable Quick Pick feature provides a custom menu that is available from most survey screens and allows you to jump to another feature and then back again quickly and easily.It’s More Than Just SoftwareWhen you choose Survey Pro, you get software built on more than 20 years of experience. You also get software that’s continually enhanced thanks to input from surveyors in the field. Many of our people—including members of the Survey Pro development team—have worked as surveyors so we understand how a small change to an existing function can help you be more productive or make your job easier. That’s why—and how—we continuously improve Survey Pro, along with all our hardware and software. So go ahead—tell us how we can make Survey Pro work even better for you — send an e-mail to ******************************RoadsImport road data from Spectra Precision Survey Office via a RXL file, which is alsoa supported format in many other CAD packages, or from a LandXML file. Multiple roads can be loaded into the road manager to use for road staking/layout. View any station and offset along the road, view a vertical profile, and see cut slope values for any station. It’s all there.Road StakeoutThe road staking capabilities enable you tostake any part and even locate catch points.Once your road has been opened, Survey Proprovides a comprehensive set of road stakeouttools and graphical views, depending uponwhich element of the road you are staking out.Quickly edit and view the road definition in thefield using the road editor. Points can also bestaked out to a predefined subgrade offset,depending upon the phase of the job you areworking on.Slope StakingSlope stake using a complete road definition,or define it yourself in the standard slopestaking screen, or just pick a point to use asthe anchor. Survey Pro displays all shots on avertical realtime map display so you can seethe profile, and quickly locate and stake thecatch point.SURVEY STANDARD™ is a complete data collection package for surveyors. It contains a complete COGO suite as well as traverse, sideshot and staking routines. SURVEY PRO shares all Survey Standard functions and adds advanced road layout routines, advanced staking routines, attribute collection, DTM routines, and much more.SURVEY PRO GNSS shares all theSurvey Pro functions, and it provides thecapability to collect data from RTK GNSSreceivers. Survey Pro GNSS software is easyto use, reduces training and simplifies setups.All staking functions are supported in theGNSS module.LEVELING MODULE Add Leveling toany module of Survey Pro to add support forlevel loops, trigonometric leveling, and digitallevel drivers.SURVEY PRO ROBOTICS shares allSurvey Pro functions and adds support forcontrolling robotic total stations. Use the datacollector at the rod to take measurements,control the instrument, and finish the surveyfaster than ever before.SURVEY PRO MAX™ is the ultimate fieldsoftware. It integrates Survey Pro Roboticsand Survey Pro GNSS functions, enablingyou to use the same job files with both GNSSreceivers and total stations.SURVEY STANDARD™ is a complete data collection package for surveyors. It contains a complete COGO suite as well as traverse, sideshot and staking routines.SURVEY PRO shares all Survey Standard functions and adds advanced road layout routines, advanced staking routines, attribute collection, DTM routines, and much more.SURVEY PRO GNSS shares all the Survey Pro functions, andit provides the capability to collect data from RTK GPS/GNSS receivers. The GNSS software is easy to use, reducestraining and simplifies setups. All staking functions aresupported when using GNSS receivers.LEVELING MODULE Add Leveling to any module of Survey Pro toadd support for level loops, trigonometric leveling, and digitallevel drivers.SURVEY PRO ROBOTICS shares all Survey Pro functions andadds support for controlling robotic total stations. Use thedata collector at the rod to take measurements, control theinstrument, and finish the survey faster than ever before.SURVEY PRO MAX™ is the ultimate field software. It integratesSurvey Pro Robotics and Survey Pro GNSS functions,enabling you to use the same job files with both GPS/GNSSreceivers and total stations.● Survey Standard▲ Survey Pro◆ Survey Pro Robotics■ Survey Pro GNSS★ Survey Pro MaxTITLE BAR/TASK BAR/MENUToggle collection mode (total station/GNSS)■★Battery status indicator●▲◆■★Map access button●▲◆■★Editable quick picks●▲◆■★Home screen●▲◆■★Build your own custom menu●▲◆■★FILEImport/export●▲◆■★JOB, RAW1, TXT, CSV, LandXML,JobXML, CR5.●▲◆■★Import Control●▲◆■★Backup/Restore●▲◆■★JOBEdit points/polylines●▲◆■★Edit alignments▲◆■★Auto linework (real time)▲◆■★View/edit raw data●▲◆■★View DTM▲◆■★Manage layers●▲◆■★Calculator●▲◆■★AU Conversions●▲◆■★SURVEY (CONVENTIONAL MODE)Backsight setup●▲◆■★Multiple point backsight●▲◆■★Traverse/sideshot●▲◆■★Quick shot4●▲◆■★Repetition shots●▲◆■★Multiple sideshots●▲◆■★Distance/angle offset●▲◆■★Corner & 2 lines●▲◆■★Corner & angle●▲◆■★Corner & offset●▲◆■★Corner & plane●▲◆■★Shoot from 2 ends●▲◆■★Resection●▲◆■★Remote elevation●▲◆■★Check point●▲◆■★Bluetooth support (Recon)●▲◆■★Solar observation▲◆■★Remote control◆★Fine turning◆★Tap to turn◆★Surface Scan2▲◆■★STAKEOUTQuick stake4●▲◆■★Cut/fill to design grade●▲◆■★Generate cut sheet data●▲◆■★Turn instrument to stake with 2-D and3-D modes◆★Remote stake from rod◆★Stake points/list of points●▲◆■★Stake to line/polyline●▲◆■★Offset staking▲◆■★Slope staking from line or point▲◆■★Stake to line and offset●▲◆■★Stake to curve and offset●▲◆■★Stake to spiral and offset▲◆■★Stake DTM▲◆■★Define a location●▲◆■★Where is next point●▲◆■★Slope stake from a point▲◆■★Station staking▲◆■★INVERSEMultiple types●▲◆■★COGOPoint in direction●▲◆■★Intersection●▲◆■★Offset line/points●▲◆■★Corner angle●▲◆■★Compute area●▲◆■★Triangle solutions●▲◆■★Map check●▲◆■★Predetermined area●▲◆■★HD/VD to/from SD/ZA●▲◆■★Station & offset▲◆■★CURVECurve solution●▲◆■★PI and tangents▲◆■★3-point curve▲◆■★Radius point●▲◆■★Tangent to circles▲◆■★Curve layout●▲◆■★Traverse on a curve●▲◆■★Parabolic curve/layout●▲◆■★Straight grade●▲◆■★Spiral/spiral layout▲◆■★Traverse on a spiral▲◆■★ROADSImport from Trimble RXL▲◆■★Supports Survey Office roads▲◆■★Complete road data supported▲◆■★Import from LandXML Roads▲◆■★Road Stakeout▲◆■★Alignment▲◆■★Cross Sections▲◆■★Any location▲◆■★Station and Offset▲◆■★Road Slope Staking▲◆■★Designate hinges and slopes▲◆■★ADJUSTScale/translate/rotate●▲◆■★Traverse adjust●▲◆■★Fix Station Setup●▲◆■★MAP VIEWSActive Background mapsDXF Layers●▲◆■★DXF Colors●▲◆■★Select objects for survey operations●▲◆■★Active Survey MapCollect points●▲◆■★Manage linework●▲◆■★Inverse point to point or line or location●▲◆■★Create Point●▲◆■★Stake to point or location●▲◆■★Show past results●▲◆■★Survey Setup displayOccupy point●▲◆■★Backsight point●▲◆■★Base location●▲◆■★Rover location●▲◆■★Rod location●▲◆■★Follow me mode●▲◆■★SURVEY (GNSS MODE)Cell phone/radio modem settings■★GPS/GNSS status■★Network connection manager■★Base/rover setup (Smart Setup)■★Control points■★Collect point, features, offset■★Projection setup/statistics■★Remote elevation■★Projection Calculator■★Receiver file manager3■★SETTINGS (GNSS MODE)Post process■★Map Projection or Calibration (localtransformation) modes■★Adjust with projection and control update■★All stakeout functions with GPS receiver■★Please note: This chart is an abbreviated general guide tosoftware functions. All specifications are subject to changewithout notice.1. Export Only.2. Requires motorized instrument.3. For Spectra Precision and Trimble receivers.4. Only available on the Nivo C, FOCUS 8 and FOCUS 30.。
02-飞马智能航测遥感系统数据处理流程20180518

注:atom文件 与pvt文件均为 飞机上下载
③ RINEX完整性检查
由于ATOM转换工具为内置的天宝工具,非飞马自行研发,为修复其中可能 出现的问题,在做完ATOM转换后需要对*.MO.RNX机型完整性检查,选择智理 图模块下的RINEX完整性检查工具即可。
④ GPS解算
导入流动站文件:飞机GPS转换出的RINEX文件(*.MO.RNX文件) 勾选基准站,Rinex头文件,指定基准站观测文件(*.o文件) 导航文件默认为流动站无需更改,单击下一步; 解算方式选择融合,不需要输入天线参数,GNSS系统按照默认即可; 指定RTK轨迹文件,及结果保存路径,单击确定开始解算。
(2)F200
F200 采用双频差分GPS,PPK结算后提供厘米级POS数据,可有效减少控制点数量。 1、面状区域控制点布设建议(适用于所有比例尺、分辨率需满足比例尺要求) 常规面状测区,按飞行架次进行控制点布设,相邻测区间需有公共控制点。
Байду номын сангаас
① 对于一般矩形区域,控制点按3行2列布设,共6个控制点,如下图所示:
飞马智能航测/遥感系统 使 用 培 训-数据处理
深圳飞马机器人科技有限公司
处理流程
1、控制点布设: F1000\F200的控制点布设方法 2、智检图:利用机载POS进行快速质检 3、智理图:F200/F2000差分解算:rt27格式转换,差分解算 F300差分解算:GNS文件转换,ATOM转换,RINEX完
参数转换大致分为两种方式: 1.有已知参数: 若当前测区有已知的转换参数,则使用参数转换软件将差分 解算后的高精度pos数据(或其他)转换为对应坐标系的平面pos 即可; 2.无已知参数: 若当前测区内没有已知的转换参数,需要先计算转换参数, 再来转换pos数据。
Airmagnet Survey使用指南
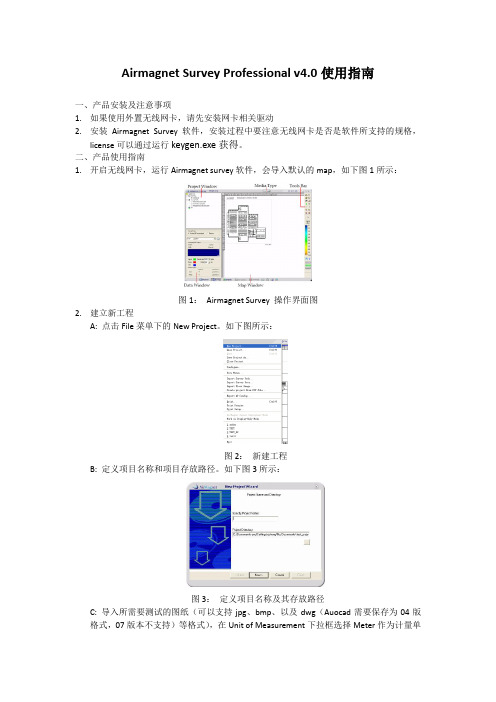
Airmagnet Survey Professional v4.0使用指南一、产品安装及注意事项1.如果使用外置无线网卡,请先安装网卡相关驱动2.安装Airmagnet Survey 软件,安装过程中要注意无线网卡是否是软件所支持的规格,license可以通过运行keygen.exe获得。
二、产品使用指南1.开启无线网卡,运行Airmagnet survey软件,会导入默认的map,如下图1所示:图1:Airmagnet Survey 操作界面图2.建立新工程A: 点击File菜单下的New Project。
如下图所示:图2:新建工程B: 定义项目名称和项目存放路径。
如下图3所示:图3:定义项目名称及其存放路径C: 导入所需要测试的图纸(可以支持jpg、bmp、以及dwg(Auocad需要保存为04版格式,07版本不支持)等格式),在Unit of Measurement下拉框选择Meter作为计量单位。
在Floor Plan Dimension下面根据实际尺寸填写宽度和长度。
如下图:图4:图纸导入以及参数设置D: 出现环境配置画面,一般根据实际情况选择第三项(仓库环境)。
然后输入评估讯号延伸范围以及无线基地台预设功率大小。
如下图5:图5:测试环境以及AP参数设定E: Survey Description不用填写,直接按Finish。
如下图:图6:工程测试描述3.AP数据采集根据实际现场情况,大致估算需要几个AP,以及放置的位置。
先把AP安装在第一个位置,进行基本的初始化配置,然后进行信号测试。
A: 选择右下角的Miscellaneous tools,连接要测试的无线AP。
图7:连接无线AP,连接成功后点击GO按钮B: 择图中最下面的Survey,然后在左下的Data Window区域选择Active (AP association) 按钮, 在下面的下拉框选择“AP”(默认是“SSID”), 在右边选择所测AP的MAC地址。
RAMAC Groundvision软件使用指南

2、按F5或点击红点,出现以下界面:
• 在File name输入文件名(缺省为profile1,以后递增) • 在Directory输入要保存文件的子目录(可用Browse浏览) • 在Antenna中选择使用的天线 • 在Trigger中选择触发方式(Distance距离,time时间,keyboard点 测(按回车键)) • 如果Trigger用Distance,则必须在它右边窗口内选合适的测量轮文件
在查找范围处点击c:\→Program files→Mala GeoScience→GroundVision →Palettes,然后选择一个颜色模板,点击“打开”,结果如下:
L E T ’S M A K E I T V I S I B L E
点击OK,即可得到彩色图像,见下图:
在change palette中点击”Default”,即可变为黑白显示
L E T ’S M A K E I T V I S I B L E
2、编辑比例尺: 点击”Profile→Edit scales”,显示如下界面:
时
深
间
度
坐
坐
标
标
L E T ’S M A K E I T V I S I B L E
• “Ground”处输入介质速度,单位是m/us • “Adjustment”处输入空气速度,300m/us • “First”处的直达波位置选取:
3.5 Running average(滑动平均),它的作用是对图像做平滑
L E T ’S M A K E I T V I S I B L E
上述处理功能加上后,点击OK即可得到以下的处理后的图像:
YAV MAX PRO无线多功能采集卡技术手册WIFI8572 ZIGBEE8572 BT8572

YAV MAX PRO无线多功能采集卡技术手册V1801武汉亚为电子科技有限公司WIFI8572ZIGBEE8572BT8572关于本手册为亚为推出的YA V MAX PRO数据采集卡的用户手册,主要内容包括功能概述、12路模拟量输入功能、4路数字量输入、2路PWM输出、2路模拟量输出、应用实例、性能测试、注意事项及故障排除等。
说明序号版本号编写人编写日期支持对象应用时间特别说明1 1.0郑先科2014.05YA V MAX PRO采集卡2 2.0郑先科2016.01YA V MAX PRO采集卡3 3.0郑先科2017.01YA V MAX PRO采集卡2017.01适用于RS232\485\WiFi\GPRS ZIGBEE\蓝牙\433M无线4 4.0李雪2017.08YA V MAX PRO采集卡2017.08目录0.快速上手 (1)产品包装内容 (1)应用软件 (1)接口定义 (1)⏹端子排列 (1)⏹端子描述 (2)通信 (3)1.产品概述 (3)技术指标 (3)⏹模拟信号输入 (4)⏹数字信号输入 (5)⏹数字信号输出 (5)⏹模拟信号输出 (6)⏹PWM输入 (6)⏹PWM输出 (6)⏹通信总线 (6)⏹温度参数 (6)硬件特点 (7)原理框图 (7)2.采集卡信号接线 (9)AI模拟量接线 (9)DI数字量接线 (9)DO数字量接线 (10)3.模拟量输入功能 (11)模拟量输入 (11)输入采样原理 (11)输入接线 (11)采样值计算 (13)⏹无符号整型 (13)⏹ADC数据类型 (13)⏹模拟量值 (13)4.模拟量输出功能 (14)输出原理 (14)5.数字量输入功能 (14)数字输入原理 (14)DI高低电平/无源触点输入 (15)计数功能输入 (15)测频功能输入 (15)PWM功能输入 (16)编码器输入 (16)AO输出匹配输入 (16)输入接线方式 (16)6.数字量输出功能 (17)输出原理 (17)DO高低电平输出 (18)输出接线方式 (18)PWM输出 (19)7.通信协议 (19)亚为WSN无线模块IOT通信协议 (19)8.应用实例 (22)软件应用 (22)⏹组态及PLC (23)⏹WSN无线通信 (24)9.注意事项及故障排除 (25)注意事项 (25)⏹存储说明 (25)⏹出货清单 (25)⏹质保及售后 (25)⏹特别说明 (25)故障排除 (26)⏹无法正常连接至上位机 (26)⏹VI文件打不开 (27)⏹数值不正常 (27)⏹DI测频计数没反应 (27)⏹多卡数据相同 (28)⏹采集速度不够 (28)⏹软件出现错误 (28)10.性能测试 (28)安全规范 (28)耐电压范围测试 (29)环境适应性测试 (29)11.文档权利及免责声明 (30)12.联系方式.......................................................................................................................错误!未定义书签。
自动R讲师(ari)0.3.5用户指南说明书

Package‘ari’October12,2022Type PackageTitle Automated R InstructorVersion0.3.5Description Create videos from'R Markdown'documents,or images and audio files.These images can come from imagefiles or HTML slides,and the audio files can be provided by the user or computer voice narration can be created using'Amazon Polly'.The purpose of this package is to allow users to create accessible,translatable,and reproducible lecture videos.See<https:///polly/>for more information. SystemRequirements ffmpeg(>=3.2.4)Depends R(>=3.1.0)Imports text2speech(>=0.2.8),tuneR,webshot,purrr,rmarkdown,xml2,rvest,tools,progress,hmsSuggests testthat,grDevices,xaringan,knitrLicense MIT+file LICENSEURL /seankross/ariBugReports /seankross/ari/issuesEncoding UTF-8LazyData trueRoxygenNote7.0.2VignetteBuilder knitrNeedsCompilation noAuthor Sean Kross[aut,cre],John Muschelli[ctb]Maintainer Sean Kross<******************>Repository CRANDate/Publication2020-02-0819:10:13UTC12ari_burn_subtitles R topics documented:ari_burn_subtitles (2)ari_example (3)ari_narrate (3)ari_spin (4)ari_stitch (6)ari_talk (7)ffmpeg_codecs (8)ffmpeg_exec (9)set_audio_codec (10)Index12 ari_burn_subtitles Burn Subtitles into a videoDescriptionBurn Subtitles into a videoUsageari_burn_subtitles(video,srt,verbose=FALSE)Argumentsvideo Video in mp4formatsrt Subtitlefile in srt formatverbose print diagnostic messages.If>1,then more are printedValueName of output videoNoteThis needs ffmpeg that was compiled with--enable-libass as per https:/// wiki/HowToBurnSubtitlesIntoVideoari_example3 ari_example Get the path to an ari examplefileDescriptionThis function allows you to quickly accessfiles that are used in the ari documentation.Usageari_example(path=NULL)Argumentspath The name of thefile.If no argument is provided then all of the examplefiles will be listed.ValueA character stringExamplesari_example("ari_intro.Rmd")ari_narrate Create a video from slides and a scriptDescriptionari_narrate creates a video from a script written in markdown and HTML slides created with rmarkdown or a similar package.This function uses Amazon Polly via ari_spin.Usageari_narrate(script,slides,output=tempfile(fileext=".mp4"),voice=text2speech::tts_default_voice(service=service),service="amazon",capture_method=c("vectorized","iterative"),subtitles=FALSE,...,verbose=FALSE,audio_codec=get_audio_codec(),video_codec=get_video_codec(),cleanup=TRUE)Argumentsscript Either a markdownfile where every paragraph will be read over a corresponding slide,or an.Rmdfile where each HTML comment will be used for narration.slides A path or URL for an HTML slideshow created with rmarkdown,xaringan,ora similar package.output The path to the videofile which will be created.voice The voice you want to use.See tts_voices for more information about what voices are available.service speech synthesis service to use,passed to tts.Either"amazon"or"google".capture_method Either"vectorized"or"iterative".The vectorized mode is faster though it can cause screens to repeat.If making a video from an ioslides_presentationyou should use"iterative".subtitles Should a.srtfile be created with subtitles?The default value is FALSE.If TRUE then afile with the same name as the output argument will be created,but withthefile extension.srt....Arguments that will be passed to webshot.verbose print diagnostic messages.If>1,then more are printedaudio_codec The audio encoder for the splicing.If this fails,try copy.video_codec The video encoder for the splicing.If this fails,see ffmpeg-codecscleanup If TRUE,interimfiles are deletedValueThe output from ari_spinExamples##Not run:#ari_narrate(system.file("test","ari_intro_script.md",package="ari"),system.file("test","ari_intro.html",package="ari"),voice="Joey")##End(Not run)ari_spin Create a video from images and textDescriptionGiven equal length vectors of paths to images(preferably.jpg s or.png s)and strings which will be synthesized by Amazon Polly or any other synthesizer available in tts,this function creates an .mp4videofile where each image is shown with its corresponding narration.This function uses ari_stitch to create the video.Usageari_spin(images,paragraphs,output=tempfile(fileext=".mp4"),voice=text2speech::tts_default_voice(service=service),service="amazon",subtitles=FALSE,...)Argumentsimages A vector of paths to images.paragraphs A vector strings that will be spoken by Amazon Polly.output A path to the videofile which will be created.voice The voice you want to use.See tts_voices for more information about what voices are available.service speech synthesis service to use,passed to tts.Either"amazon"or"google".subtitles Should a.srtfile be created with subtitles?The default value is FALSE.If TRUE then afile with the same name as the output argument will be created,but withthefile extension.srt....additional arguments to ari_stitchDetailsThis function needs to connect to Amazon Web Services in order to create the narration.You canfind a guide for accessing AWS from R here.For more information about how R connects to Amazon Polly see the aws.polly]documentation here.ValueThe output from ari_stitchExamples##Not run:slides<-system.file("test",c("mab2.png","mab1.png"),package="ari")sentences<-c("Welome to my very interesting lecture.","Here are some fantastic equations I came up with.")ari_spin(slides,sentences,voice="Joey")##End(Not run)6ari_stitch ari_stitch Create a video from images and audioDescriptionGiven a vector of paths to images(preferably.jpg s or.png s)and aflat list of Wave s of equal length this function will create an.mp4videofile where each image is shown with its corresponding audio.Take a look at the readWave function if you want to import your audiofiles into R.Please be sure that all images have the same dimensions.Usageari_stitch(images,audio,output=tempfile(fileext=".mp4"),verbose=FALSE,cleanup=TRUE,ffmpeg_opts="",divisible_height=TRUE,audio_codec=get_audio_codec(),video_codec=get_video_codec(),video_sync_method="2",audio_bitrate=NULL,video_bitrate=NULL,pixel_format="yuv420p",fast_start=TRUE,deinterlace=TRUE,stereo_audio=TRUE)Argumentsimages A vector of paths to images.audio A list of Wave s from tuneR.output A path to the videofile which will be created.verbose print diagnostic messages.If>1,then more are printedcleanup If TRUE,interimfiles are deletedffmpeg_opts additional options to send to ffmpeg.This is an advanced option,use at your own riskdivisible_heightMake height divisible by2,which may be required if getting"height not divisi-ble by2"error.audio_codec The audio encoder for the splicing.If this fails,try copy.video_codec The video encoder for the splicing.If this fails,see ffmpeg-codecsari_talk7video_sync_methodVideo sync method.Should be"auto"or‘"vfr"‘or a numeric.See https:///ffmpeg.html.audio_bitrate Bit rate for audio.Passed to-b:a.video_bitrate Bit rate for video.Passed to-b:v.pixel_format pixel format to encode for‘ffmpeg‘.fast_start Adding‘faststart‘flags for YouTube and other sites,see https://trac.ffmpeg.org/wiki/Encode/YouTubedeinterlace should the video be de-interlaced,see https:///ffmpeg-filters.html,generally for YouTubestereo_audio should the audio be forced to stereo,corresponds to‘-ac2‘DetailsThis function uses FFmpeg which you should be sure is installed before using this function.If running Sys.which("ffmpeg")in your R console returns an empty string after installing FFm-peg then you should set the path to FFmpeg on you computer to an environmental variable using Sys.setenv(ffmpeg="path/to/ffmpeg").The environmental variable will always override the result of Sys.which("ffmpeg").ValueA logical value,with the attribute outfile for the outputfile.Examples##Not run:if(ffmpeg_version_sufficient()){result=ari_stitch(ari_example(c("mab1.png","mab2.png")),list(tuneR::noise(),tuneR::noise()))}##End(Not run)ari_talk Create spoken audiofilesDescriptionA simple function for demoing how spoken text will sound.8ffmpeg_codecsUsageari_talk(paragraphs,output=tempfile(fileext=".wav"),voice=text2speech::tts_default_voice(service=service),service="amazon")Argumentsparagraphs A vector strings that will be spoken by Amazon Polly.output A path to the audiofile which will be created.voice The voice you want to use.See tts_voices for more information about what voices are available.service speech synthesis service to use,passed to tts Either"amazon"or"google".ValueA Wave output object,with the attribute outfile of the outputfile name.ffmpeg_codecs Get Codecs for ffmpegDescriptionGet Codecs for ffmpegUsageffmpeg_codecs()ffmpeg_video_codecs()ffmpeg_audio_codecs()ffmpeg_muxers()ffmpeg_version()ffmpeg_version_sufficient()check_ffmpeg_version()ValueA‘data.frame‘of codec names and capabilitiesffmpeg_exec9 Examples##Not run:if(ffmpeg_version_sufficient()){ffmpeg_codecs()ffmpeg_video_codecs()ffmpeg_audio_codecs()}##End(Not run)ffmpeg_exec Get Path to ffmpeg ExecutableDescriptionGet Path to ffmpeg ExecutableUsageffmpeg_exec(quote=FALSE)have_ffmpeg_exec()Argumentsquote should shQuote be run before returning?ValueThe path to the ffmpeg executable,or an error.NoteThis looks using‘Sys.getenv("ffmpeg")‘and‘Sys.which("ffmpeg")‘tofind‘ffmpeg‘.If‘ffmpeg‘is not in your PATH,then please set the path to‘ffmpeg‘using‘Sys.setenv(ffmpeg="/path/to/ffmpeg")‘Examples##Not run:if(have_ffmpeg_exec()){ffmpeg_exec()}##End(Not run)10set_audio_codec set_audio_codec Set Default Audio and Video CodecsDescriptionSet Default Audio and Video CodecsUsageset_audio_codec(codec)set_video_codec(codec="libx264")get_audio_codec()get_video_codec()audio_codec_encode(codec)video_codec_encode(codec)Argumentscodec The codec to use or get for audio/es the‘ffmpeg_audio_codec‘and ‘ffmpeg_video_codec‘options to store this information.ValueA‘NULL‘outputSee Also[ffmpeg_codecs()]for optionsExamples##Not run:if(have_ffmpeg_exec()){print(ffmpeg_version())get_audio_codec()set_audio_codec(codec="libfdk_aac")get_audio_codec()set_audio_codec(codec="aac")get_audio_codec()}if(have_ffmpeg_exec()){get_video_codec()set_video_codec(codec="libx265")get_video_codec()set_audio_codec11 set_video_codec(codec="libx264")get_video_codec()}##empty thingif(have_ffmpeg_exec()){video_codec_encode("libx264")audio_codec_encode("aac")}##End(Not run)Indexari_burn_subtitles,2ari_example,3ari_narrate,3ari_spin,3,4,4ari_stitch,4,5,6ari_talk,7audio_codec_encode(set_audio_codec),10 check_ffmpeg_version(ffmpeg_codecs),8 ffmpeg_audio_codecs(ffmpeg_codecs),8 ffmpeg_codecs,8ffmpeg_exec,9ffmpeg_muxers(ffmpeg_codecs),8ffmpeg_version(ffmpeg_codecs),8ffmpeg_version_sufficient(ffmpeg_codecs),8ffmpeg_video_codecs(ffmpeg_codecs),8get_audio_codec(set_audio_codec),10get_video_codec(set_audio_codec),10have_ffmpeg_exec(ffmpeg_exec),9ioslides_presentation,4readWave,6rmarkdown,3,4set_audio_codec,10set_video_codec(set_audio_codec),10 shQuote,9tts,4,5,8tts_voices,4,5,8video_codec_encode(set_audio_codec),10 Wave,6webshot,412。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
w w
2009/6/19
la . w
g n
m o .c n u k
2
一. 产品安装&使用说明
AirMagnet Support Card :
w w
2009/6/19
la . w
g n
m o .c n u k
3
一. 产品安装&使用说明
如何开始使用Survey Pro&建立New Project: 1.点选 开始/程序/AirMagnet Surveyor/Surveyor 2.点选 File/New Project 输入Project name 3.汇入所要进行Survey之平面图(dwg、jpg、bmp…) 4.输入图面之实际比例 5.选择所Survey之环境类型 6.输入评估讯号延伸范围、无线基站预设功率大小 7.输入Site Survey简易描述 8.完成开启New Project
la . w
g n
m o .c n u k
15
一. 产品安裝&使用说明
如何开使新的Survey计划图示说明: E.选择所Survey之环境类型 F.输入评估讯号延伸范围、无线基地台预设功率大小
w w
2009/6/19
la . w
g n
m o .c n u k
16
二.功能&画面介绍
Survey画面&各功能说明:
g n
m o .c n u k
2009/6/19
19
二.功能&画面介绍
B.Survey Screen Data Window B-2. Passive Survey Data Window
Parameter Channel MAC Address Signal Strength Description
Survey Screen File Menu
Survey Screen Project Window
w w
2009/6/19
la . w
g n
Survey Screen Map Window
m o .c n u k
Survey Screen View Menu
Survey Screen View Menu
10
一. 产品安裝&使用说明
产品安装图示流程: E-2.选择授权license路径
w w
2009/6/19
la . w
g n
m o .c n u k
11
一. 产品安裝&使用说明
产品安装图示流程: F.完成安裝
w w
2009/6/19
la . w
g n
m o .c n u k
12
一. 产品安裝&使用说明
The name of the network to which the associated AP belongs. The rate (in terms of Mbps) at which packets are transmitted.
Signal
Noise Packet Size Delay
大
一. 二. 三. 四. 五. 产品安装&使用说明 功能&画面介绍 报表制作 GPS运用 Q&A
纲
w w2009/6/19源自la . wg n
m o .c n u k
1
一. 产品安装&使用说明
产品安装注意事项: 1.确认产品序列号及金钥 2.无线网卡是否符合AirMagnet所支持规格(图1) 3.是否取得AirMagnet原厂授权的License 产品安装步骤: 1.安装无线网卡 2.执行AirMagnet Survey Pro安装软件 3.选择所要安装软件的路径 4.选择取得License方式 5.选择所安装的无线网卡厂家&型号 6.取得License(初次安装需先注册取得lic) 7.完成Survey Pro安装
g n
m o .c n u k
The level of background RF energy in the 2.4-GHz or 5-GHz band. The Lower the value, the less the noise.
The difference between signal strength and noise level.
Bytes/s
Packets/s Lost
Retry
w w
la . w
The radio channel the AP uses to send and receive RF signals.
The signal strength for the received packets. The higher the value, the stronger the signal.
The name of the network to which an AP belongs.
2009/6/19
20
二.功能&画面介绍
C.Survey Screen File Menu
Menu Option New Project... Open... Save Close Project Description
la . w
g n
m o .c n u k
6
一. 产品安裝&使用说明
产品安装图示流程: C.选择所要注册的方式 1.AirMagnet Survey license tied to specific laptop or table 2.Airmagnet Survey license tied to specific Wi-Fi card 3.Display Only
The level of background radio frequency energy in the 2.4-GHz or 5-GHz band. The lower the value, the less the noise. The size of the packet transmitted in terms of bytes. The delay in million seconds between successive transmissions. The number of bytes (of data) transmitted per second. The number of packets (of data) transmitted per second. The percentage and number of packets that were not transmitted successfully from the AP. The percentage and number of packets that were re-sent if an acknowledgment (ACK) was not returned by the AP.
Opens the New Project Wizard window where you can create a new Survey project. It works in the same way as Project Wizard on the toolbar. Opens an existing Survey project. It works in the same way as (Open Project on the toolbar.
Survey Screen Data Window
17
二.功能&画面介绍
A.Survey Screen Project Window
• Site Map— contains all the site maps for the Survey project. To select a site map, put a check mark in the check box in front of the map file. The selected map will be displayed in the Map Win-dow. By default, a site map is automatically selected and dis-played when a new project is created, or when an existing project is oened. • Survey Path—contains all the survey paths recorded during a site survey. You can have as many survey paths in the folder as you recorded, and display as many of them as necessary. To dis-play a survey path, put a check mark in the check box in front of the survey path file. • AP—contains all the access points against which active sur-veys are conducted. You can have as many APs as recorded and display as many of them as necessary. To display an AP, put a check mark in the check box in front of the AP file.
w w
2009/6/19
la . w
g n
m o .c n u k
9
一. 产品安裝&使用说明