小型三轴机械手
三轴机械手系统使用手册
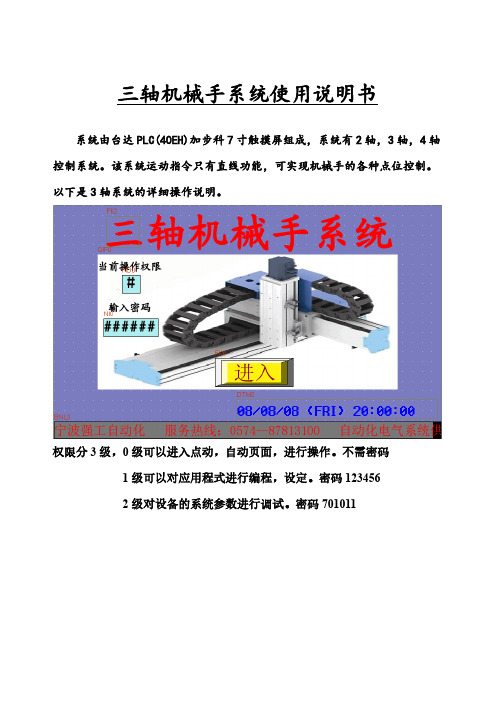
三轴机械手系统使用说明书系统由台达PLC(40EH)加步科7寸触摸屏组成,系统有2轴,3轴,4轴控制系统。
该系统运动指令只有直线功能,可实现机械手的各种点位控制。
以下是3轴系统的详细操作说明。
权限分3级,0级可以进入点动,自动页面,进行操作。
不需密码1级可以对应用程式进行编程,设定。
密码1234562级对设备的系统参数进行调试。
密码701011程式停止状态下,各运动轴自动完成搜索零点动作。
在系统设置中激活后才有效。
各轴的限位应安装完成。
在一些前提下,搜索零点方式并不是必须的,可使用人工确认零点的方式工作,系统具有断电位置记忆功能,在再次手动确认零点前,保持原零点位置有效。
长按3s,当前位置置为新的零点。
程式停止状态下,各轴快速返回零点位置。
零点可由搜索或手动确认。
设定点动时的移动速度。
设定快速返回零点时的移动速度。
设定搜索零点的移动速度。
x轴当前所处的位置。
y轴当前所处的位置。
Z轴当前所处的位置。
输出端口y10点动试动作按钮,其它相同。
指示相应输入x端口的状态。
点动运动轴时快速选择慢速移动。
x轴双向点动操作按钮y轴双向点动操作按钮z轴双向点动操作按钮进入手脉点动页面按钮,在系统设置中激活后才有效。
进入编写程式页面按钮进入自动操作页面按钮手脉操作选择手脉每一格对应的脉冲数被锁定,不能操作,只有手脉操作有效。
其它同前说明。
系统设定登录等级密码701011进入对刀示教界面。
示教方式有按钮操作示教,手脉示教两种。
进入示教点教导界面。
示教方式有按钮操作示教,手脉示教两种。
选择编写、查询的程式序号,主程0---4个,子程10—19个。
对程序行进行翻页操作。
指示当前的状态,人工可以在查询,编程两种状态切换。
查询中不能修改程式,只有进入编程状态,才可修改程式。
可编写的程序步。
按提示编写。
指令说明见后。
在当前行处直接插入一步。
删除当前步。
指令区,选择相应的指令。
在主程编写时,指令全可以使用,进入子程编写时,5类运动指令不能使用,只能编写动作程式。
圆柱坐标式三自由度机械手

圆柱坐标式三自由度机械手摘要机器人不仅是一种自动化的机器。
机器人是一种可重新编程的、多功能的、机械手,为实现各种任务设计成通过可改变的程序动作来移动材料、零部件、工具或是其他专用装置。
本设计设计的是一种圆柱坐标式机械手,该装置具有三个独立运动(两个直线运动、一个旋转运动),也就是所说的三个自由度。
该机构中立柱可相对于机座旋转180度,回转速度15r/min,可水平伸缩距离400mm,移动速度约0.2m/s,机械手可上下垂直运动,其垂直升降量1000mm,移动速度约0.15m/s,机械手最大夹持重量10kg,所夹持工件为圆柱形,直径范围:Ф30mm—Ф120mm。
根据课题要求经过认真思考和请教指导老师,本设计的旋转运动采用摆动液压马达(旋转液压缸)驱动,水平伸缩运动采用液压缸驱动,垂直升降运动仍采用液压缸驱动。
关键词:三自由度,圆柱坐标式,工业机器人,机械手CYLINDRICAL COORDINATE ROBOT OFTHREE DEGREES OF FREEDOMABSTRACTA robot is not simply another automated machine. A robot is a reprogrammable multifunctional manipulator designed to move material, parts, tool, or specialized devices through variable programmed motions for the performance of a variety of task.This design is a cylindrical coordinate manipulator, the device has three separate campaigns (two straight-line movement, a rotating Movement), that is to say that the device has three degrees of freedom. The bodies of the column can be compared to frame 180-degree rotation, with the rotation speed 15 r / min. The manipulator may be stretching from the level of 400mm, with the moving speed about 0.2 m/ s. From the top to the bottom, the manipulator can do vertical movement and its vertical take-off and landing is 1000mm, with the moving speed about 0.15 m/ s. The largest weight that the device grip can lead to 10kg.The workpiece with the diameter from 30mm to 120mm that the device can grip is cylindrical.According to the issue demands ,besides, careful thinking and ask the teacher, the rotating movements of the design opts rotating hydraulic motor (rotating cylinder) , the level of stretching movements are driven by hydraulic cylinders, vertical take-off and landing movements are still driven by hydraulic cylinders.KEY WORDS:Three degrees of freedom, Cylindrical,Industrial robot, Manipulator目录前言 (1)第1章概述 (2)§1.1 工业机械手的概述 (2)§1.2 工业机械手的发展 (5)§1.3 工业机械手在我国的发展与应用 (6)第2章总体设计方案 (8)§2.1 总体设计的思路 (8)§2.1.1 思路 (8)§2.2 总体方案的确定 (8)§2.2.1 方案 (8)第3章机械手相关的设计与计算 (10)§3.1 手指的相关设计与计算 (10)§3.1.1 手指夹紧力的计算 (10)§3.1.2 手部液压缸的选取 (13)§3.1.3 水平伸缩缸尺寸计算 (15)§3.1.4垂直升降液压缸主要参数的确定 (16)§3.2 升降手臂的设计 (17)§3.3 立柱与托盘的设计 (19)第4章相关的校核 (25)§4.1 手爪扇形齿轮与齿条强度校核 (25)§4.1.1 齿轮齿条强度校核 (25)第5章结论 (26)参考文献 (27)致谢 (28)前言机器人技术的发展,可以说是科学技术发展共同的一个综合性的结果,同时,也是为社会经济发展产生了重大影响的一门科学技术,它的发展归功于在第二次世界大战中各国加强了经济的投入,就加强了本国的经济的发展。
三轴机械手的推力计算

三轴机械手的推力计算
三轴机械手的推力计算是指在机械手进行正向运动时所需施加的力的计算。
这个力的大小与机械手的质量、加速度、摩擦系数等因素有关。
首先,需要计算机械手在运动时的加速度。
这可以通过测量机械手的运动时间以及位移来计算出。
然后,需要根据机械手的质量和加速度计算出所需的推力。
这可以使用牛顿第二定律F=ma,其中F是推力,m是机械手的质量,a是机械手的加速度。
另外,还需要考虑机械手与其运动环境之间的摩擦力。
摩擦力的大小取决于机械手与环境接触面的材料和表面质量等因素。
为计算出摩擦力对推力的影响,可以使用摩擦系数。
摩擦系数是指在两个物体之间摩擦力与垂直于两物体接触面的力之比。
最后,根据机械手的运动轨迹和所需的推力,可以计算出每个轴所需施加的力的大小和方向。
这可以使用运动学和动力学等数学模型来计算。
综上所述,三轴机械手的推力计算需要考虑机械手的质量、加速度、摩擦系数以及运动轨迹等因素。
使用牛顿第二定律和摩擦系数等公式可以计算出所需的推力,并根据机械手的运动轨迹计算出每个轴所需施加的力的大小和方向。
三轴并联机械手工作范围
三轴并联机械手工作范围引言概述:三轴并联机械手是一种常见的工业机器人,其工作范围是指机械手能够覆盖的空间范围。
工作范围的大小直接影响机械手在生产线上的应用灵活性和效率。
本文将从五个大点来阐述三轴并联机械手的工作范围,包括机械手结构、关节限制、工作空间形状、末端执行器限制和运动范围的优化。
正文内容:1. 机械手结构1.1 三轴并联机械手通常由三个旋转关节组成,每个关节可以在一定范围内进行旋转运动。
1.2 机械手的结构决定了其工作范围的形状和大小,不同结构的机械手可能具有不同的工作范围。
2. 关节限制2.1 机械手的关节限制是指每个关节旋转的最大角度范围,这将直接影响机械手能够覆盖的空间范围。
2.2 关节限制的大小决定了机械手的工作范围的局限性,如果关节限制太小,机械手可能无法完成某些任务。
3. 工作空间形状3.1 机械手的工作空间形状是指机械手能够覆盖的空间的形状,通常为一个三维空间中的一个区域。
3.2 工作空间形状的大小和形状决定了机械手在生产线上能够操作的物体的大小和形状。
4. 末端执行器限制4.1 机械手的末端执行器是机械手用来进行物体抓取、放置等操作的部件,其大小和形状将直接影响机械手的工作范围。
4.2 末端执行器的限制包括其最大抓取范围、最大负载能力等,这些限制将决定机械手能够完成的任务类型和难度。
5. 运动范围的优化5.1 为了扩大机械手的工作范围,可以通过优化机械手的运动范围来实现。
5.2 运动范围的优化可以包括改变机械手的结构设计、增加关节的旋转范围、优化末端执行器的设计等。
总结:综上所述,三轴并联机械手的工作范围是通过机械手的结构、关节限制、工作空间形状、末端执行器限制和运动范围的优化来决定的。
了解和优化这些因素,可以提高机械手的工作范围,使其在生产线上具有更大的灵活性和效率。
三轴联动机械臂伺服运动机械结构设计
三轴联动机械臂伺服运动机械结构设计(摘要)机械手臂是目前在机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。
尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。
根据结构形式的不同,机械手臂可分为多关节机械手臂,直角坐标系机械手臂、球坐标系机械手臂,极坐标机械手臂,柱坐标机械手臂等。
本文所设计的机械手臂为直角坐标系机械手臂,其由三个伺服电机驱动,通过运动控制卡实现运动控制,可以实现三轴联动,分别为X 移动,Y 移动,Z 移动。
手臂的运动由三个丝杠螺母副完成,伺服电机驱动丝杠旋转,螺母副移动,从而实现三个自由度的运动。
关键词机械手臂三轴联动三个自由度Abstract IIMechanical arm is currently the most widely practical application in the field of robottechnology in automation machinery, industrial manufacturing, medical treatment,entertainment services, military, semiconductor manufacturing and other areas ofspace exploration can see its shadow. Despite their morphology vary, but they allhave one common characteristic, that is able to accept instruction, preciselypositioned to carry out operations at a point three (or two-dimensional) space.According to the different structure, mechanical arm can be divided into multi-joint robot, Cartesian coordinates robot, spherical coordinates robot, polar coordinaterobot, cylindrical coordinates robot arm and the like. This article is designed as Cartesian robot manipulator arm, which is driven by three servo motors, motion control through motion control card, you can achieve three-axis, respectively, X Mobile, Y movement, Z move. Arm movement consists of three screw nut is completed, servo motor drive screw rotation, nut move, in order to achieve three degrees of freedom of movement. Key words Mechanical arm Axis linkageThree degrees of freedom第1 章绪论 11.1 研究背景随着科技的发展,工业自动化程度不断提高,机械臂广泛用于各种制造行业中,但对于机械臂在工业的应用来说,大部分时候并不需要机械臂具有六个自由度,其中的一个或几个即可满足工业需求,由于三轴联动机械臂具有三个自由度,基本上可以满足制造行业中以空间任意一点为目标位置的运动要求,故三轴联动机械臂在工业自动化上的运用最为广泛。
三轴桁架机械手每个轴的特点及作用

三轴桁架机械手每个轴的特点及作用1.引言1.1 概述概述三轴桁架机械手是一种常见的工业机械设备,其主要由三个轴组成。
每个轴都具有独特的特点和作用,为机械手的运动和操作提供必要的功能和灵活性。
第一轴通常被称为基座轴,它是机械手的基础支架。
第一轴的特点是它在水平方向上旋转,使机械手能够在一个平面上移动。
它的作用是提供机械手的整体运动和定位能力。
第二轴称为肩轴,它连接在第一轴上。
第二轴的特点是它能够向上和向下移动,使机械手能够在垂直方向上进行抬升和降低操作。
它的作用是控制机械手的抓取高度和范围。
第三轴被称为腕轴,它连接在第二轴上。
第三轴的特点是它能够旋转,使机械手能够在水平方向上进行旋转和转动。
它的作用是提供机械手的柔性和灵活性,使其能够适应不同方向和角度的操作。
三轴桁架机械手通过协调和控制每个轴的运动,能够实现各种复杂的操作任务。
例如,通过控制第一轴的旋转和第二轴的抬升,机械手可以在平面上精确地定位和抓取物体。
通过控制第三轴的旋转,机械手可以调整物体的方向和角度。
这种结构和运动方式使得三轴桁架机械手在自动化生产线以及其他工业领域中得到广泛应用。
总之,每个轴在三轴桁架机械手中都起着重要的作用,它们的特点和功能是实现机械手运动和操作的基础。
理解和掌握每个轴的特点及其作用,对于使用和控制三轴桁架机械手具有重要意义。
下面将在接下来的部分分别介绍每个轴的特点及其作用,以便更深入地了解这一机械设备。
1.2文章结构文章结构部分的内容可以包括以下信息:文章结构部分旨在对整篇文章的结构和内容进行说明,使读者可以清晰地了解文章的组织和主要内容。
本文将包括引言、正文和结论三个部分。
引言部分将概述本文的主要内容和研究对象,介绍三轴桁架机械手的背景和意义,并明确本文的目的和研究方法。
通过引言,读者可以了解到本文的研究背景和研究目的,为后续内容的阅读提供了背景和引导。
正文部分将对三轴桁架机械手的每个轴的特点和作用进行详细介绍。
三轴机械手安全操作及保养规程

三轴机械手安全操作及保养规程前言三轴机械手是一种广泛应用于机械设备生产制造领域的机械设备,它能够在制造生产过程中承担生产任务,从而提高制造生产效率。
与此同时,三轴机械手的操作需要注意安全问题,并且需要定期保养,以确保设备能够正常运行。
本文档将介绍三轴机械手的安全操作及保养规程。
一、安全操作规程1.了解三轴机械手操作的相关知识和规定:操作前应熟悉设备的操作手册,了解设备的功能及参数,以及使用注意事项等信息。
2.保持设备周围干净整洁:设备周围的环境应该保持干净,清洁设备及附件,防止堵塞孔洞和通风口。
3.严格遵守安全操作规程:三轴机械手仅限训练有素的人员操作,不得跨越运动轨迹。
千万不可达手穿过机器夹持器,也不可随便移动固定位置。
4.遵循设备的操作顺序:操作三轴机械手时应遵循设备的操作顺序,不得擅自更改流程。
5.确保设备各部件正常:进行操作前需检查设备各部件是否正常运转,如有故障应将机器停止运转并及时维修。
6.避免操作过度:严禁操作时过于集中注意力导致疏忽大意与设备手臂发生撞击等事故,应留出一定的余地以防万一。
7.严禁饮酒后操作:在饮酒等情况下禁止操作三轴机械手,以免因无法专注导致意外伤害。
二、保养规程1.定期检查设备:必须定期检查设备,为设备制定详细的检查程序,如果发现异常或故障必须停止机器并及时进行维修。
2.定期清洁设备:定期清洁并保持设备外观干净整洁,避免浸入水或渗入液体物质。
3.定期加油维护:设备应定期加油和检查润滑点,以确保设备长期维护运作正常。
4.进行设备保养:准备“检测与保养”的文件,包括了分类详细的工作内容与时间的制度,定期进行保养工作。
5.定期更换消耗品:三轴机械手中伺服电机的装配系统要经常检查和维护,如有异常要及时更换或修复。
三、结论三轴机械手的安全操作及保养规程对于设备的安全和长期稳定运转具有重要作用。
通过遵循安全操作规程和保养规程,不仅可以预防机器意外事故,并且可以延长机器的使用寿命,提高设备的使用效率。
三轴龙门机械手

摘要工业机器手由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
生产中应用机械手可以提高生产的自动化水平,可以减轻劳动强度、保证产品质量、实现安全生产机械手的结构形式比较简单,通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的引用。
本课题将设计一个三轴龙门机械手,需完成X、Y、Z三维空间内的移动要求,以及对工件的安全抓紧和释放,将仓库出库的工件搬运到生产线的输送带上。
关键词:机器人;效率;龙门;三轴AbstractIndustrial machine by hand CaoZuoJi (mechanical body),controller,servo drive system and detection sensor,which is a kind of copy operation,automatic control,can repeat programming in 3 d space,can finish all kinds of assignments electromechanical integration of the automatic production equipment. Particularly suitable for many varieties,change of flexible production batch. It to help stabilize,improve product quality,raise efficiency in production,improve working conditions and product rapid renewal plays a very important role. Production application manipulator can be used to increase production of automation level,can reduce labor intensity,ensure the quality of products,and realize safe production of the manipulator structure form began comparing simple,general manipulator can quickly change working procedures,good daptability,so it continues to transform the production of medium and small batch production of a wide range of references.Key Words: a manipulator,Efficiency; Simple; adaptability目录摘要 (I)Abstract (II)目录 (III)第1章绪论 (1)1.1 机器人概述 (1)1.2 机器人的历史、现状 (2)1.3 机器人发展趋势 (3)第2章机械手总体设计方案 (4)2.1机械手基本形式的选择 (4)2.1.1直角坐标系机器人 (4)2.1.2圆柱坐标系机器人 (4)2.1.3极坐标系机器人 (4)2.1.4多关节机器人 (5)2.2驱动装置的选择 (6)2.2.1液压驱动 (6)2.2.2气压驱动 (7)2.2.3电动机驱动 (7)第3章三轴机械手的总体方案设计 (8)3.1设计参数 (8)3.2方案设计 (8)3.2.1 X轴方案设计 (9)3.2.2 Y轴方案设计 ................................................................... 错误!未定义书签。
三轴伺服机械手使用说明书 V2.00
三轴伺服机械手控制系统使用说明书前言本系统在出厂前已经过严格检查。
五六轴伺服机械手控制系统购入后,请检查本系统是否因运输不慎而造成损伤;产品的规格、型号是否与订购产品的机种相符;有无合格标志等。
如有问题,请与本公司或供应商联系。
本系统安装须注意以下几个事项:●外部电源发生异常,控制系统会发生故障,为了整个系统安全工作,请务必在控制系统外部设置安全电路。
●安装、配线、运行、维护前,必须熟悉本说明书内容;使用时也必须熟悉相关的机械、电子常识及一切有关安全的注意事项。
●请安装与金属等阻燃物上并远离可燃物。
●配线作业必须由专业电工进行。
●确认电源断开后才能开始作业。
●使用环境温度为0~50℃,不要使用在结露及冰冻的地方目录前言 (2)1.基本配置 (5)2.主要技术参数 (5)3.操作面板说明 (6)3.1.外观及说明 (6)3.2.主界面及轴的定义 (7)4.运行模式 (8)4.2.手动操作说明 (9)4.2.1.按键操作说明 (9)4.2.2.手动输入操作说明 (10)4.2.3.手轮操作说明 (14)4.3.自动操作说明 (15)4.3.1.自动运行数据监控 (15)4.3.2.自动运行参数修改 (16)5.功能设定说明 (17)5.1.1.信号设定说明 (18)5.1.2.时间参数说明 (20)5.1.3.运行参数说明 (21)5.1.4.安全设置说明 (21)5.1.5.设备参数说明 (23)5.1.6.产品设定说明 (24)5.1.7.堆叠设置说明 (25)5.1.8.系统设置说明 (27)5.1.9.文件管理说明 (28)5.1.10.维护说明 (29)6.IO实时状态说明 (30)7.告警列表说明 (30)8.教导操作说明 (31)8.1.教导文件操作 (31)8.2.程序教导 (32)8.2.1.伺服动作教导 (32)8.2.2.气动动作教导 (33)8.2.3.夹具抱具教导 (34)8.2.4.吸盘动作教导 (35)8.2.5.联机信号 (35)8.2.6.辅助设备 (36)8.2.7.等待信号 (37)8.2.8.分段信号 (38)8.2.9.模座跟踪 (38)8.3.帮助说明 (38)9.系统软件升级 (38)9.3.升级 (41)10.调试说明 (42)11.安装与接线 (42)附录1 (48)概述本系统为五六轴伺服机械手控制系统装载,支持机械手用到的各种指令动作;支持单直线,两轴直线、三轴直线及两轴圆弧等运动;支持对各个轴,输入输出点进行程式编程;采用了先进的分段式控制,可实现对每个轴的独立控制,特别适应于快速多轴的流水线;也可以实现多轴多步联动动作,在一个单步中可以支持15步的动作;采用8寸全触摸屏界面,操作简洁方便;本系统可以适用于各种复杂的机械手系统中,支持注塑行业的产品取出、放入;支持加工行业的工件搬运;支持多动作的流水线作业。
三自由度气动搬运机械手的设计-开题报告

三自由度气动搬运机械手的设计-开题报告研究背景在现代工业生产中,机械手作为重要的自动化设备,在生产线上扮演着重要的角色。
目前的机械手多采用电动方式驱动,但在某些特殊环境下,例如易燃易爆场所或高温高压环境,电动机械手往往存在安全隐患或性能限制。
因此,寻求一种新的驱动方式来设计机械手具有重要意义。
研究目标本研究旨在设计一种具有由度的气动搬运机械手,以解决传统电动机械手在特殊环境下存在的安全隐患和性能限制问题。
具体的研究目标包括:1. 分析气动驱动系统的工作原理和优势,研究其适用性和可行性;2. 设计一个具有由度的机械手结构,考虑外部负载和运动稳定性;3. 研究机械手的控制方法,实现准确灵活的搬运动作;4. 进行实验验证,评估气动搬运机械手的性能和可靠性。
研究方法本研究将采用以下方法来实现研究目标:1. 文献综述:对机械手和气动驱动系统的相关文献进行综述,深入了解当前研究进展和存在的问题;2. 系统分析:分析气动驱动系统的工作原理和优势,评估其在特殊环境中的适用性和可行性;3. 结构设计:根据气动驱动系统的特点,设计一个具有由度的机械手结构,考虑外部负载和运动稳定性;4. 控制方法:研究机械手的控制方法,实现准确灵活的搬运动作;5. 实验验证:进行实验验证,评估气动搬运机械手的性能和可靠性,分析实验结果。
预期成果通过本研究,预期可以达到以下成果:1. 设计出一种具有由度的气动搬运机械手,解决传统电动机械手在特殊环境下的安全隐患和性能限制问题;2. 深入理解气动驱动系统的工作原理和优势,为气动驱动系统在其他领域中的应用提供参考;3. 提出灵活准确的机械手控制方法,为其他自动化设备的控制提供借鉴;4. 实验验证气动搬运机械手的性能和可靠性,为机械手的实际应用提供参考数据。
研究计划本研究计划的大致时间安排如下:- 第一阶段:文献综述和气动驱动系统分析(2个月)- 第二阶段:机械手结构设计和控制方法研究(3个月)- 第三阶段:实验验证和结果分析(2个月)- 第四阶段:论文撰写和修改(1个月)预期影响本研究的成果对以下方面可能产生影响:1. 工业自动化领域:提供一种新型的机械手设计方案,解决传统电动机械手在特殊环境下存在的问题。
三轴机械手设计方案

三轴机械手设计方案随着工业自动化技术的快速发展,机械手在现代工业生产中发挥着重要的作用。
三轴机械手是一种常见的机械手型号,其通过三个轴向的运动实现对物体的抓取、传送和放置等操作。
下面是一个三轴机械手的设计方案。
首先,需要确定机械手的尺寸和载荷要求。
根据生产线上的工作环境和物体的尺寸、重量等特性,确定机械手的尺寸和载荷要求。
一般来说,三轴机械手的尺寸较小,适合用于细小物体的操作,而载荷要求一般在1-10kg之间。
接下来,选择合适的执行器和传感器。
执行器负责机械手的运动,可以选择气动、液压或电动执行器。
根据工作环境和精度要求,选择合适的执行器。
同时,为了实现对物体姿态的感知和控制,需要安装传感器,如位置传感器、力传感器和视觉传感器等。
然后,设计机械手的机构。
三轴机械手一般采用串联机构或并联机构。
串联机构由各关节依次连接构成,适用于较大的承载能力要求;而并联机构由几个关节同时作用于执行器,具有较高的刚度和精度,适用于高精度要求的场合。
根据实际需求,选择合适的机构。
此外,需要考虑机械手的控制系统。
控制系统由控制器、控制算法和接口等组成,负责对机械手的运动和姿态进行控制。
控制系统可以使用PLC、单片机或计算机等设备,通过编程实现对机械手的控制。
根据控制要求和预算限制,选择合适的控制系统。
最后,进行机械手的装配和调试。
按照设计图纸,进行机械手的零部件加工、装配和调试工作。
确保机械手各部件的质量和安装精度,保证机械手的正常运行。
综上所述,三轴机械手设计方案包括确定尺寸和载荷要求、选择执行器和传感器、设计机构、设计控制系统以及机械手的装配和调试。
通过科学合理的设计和精心制造,三轴机械手可以实现对物体的灵活准确的操作,提高生产效率和质量。
3轴机械手臂控制算法

3轴机械手臂控制算法3轴机械手臂控制算法是指控制机械手臂在三维空间内进行移动和操作的算法。
该算法主要包括逆运动学算法和轨迹规划算法。
1. 逆运动学算法:通过给定机械手臂的末端坐标,求解各个关节的角度,使得末端可以达到目标位置。
逆运动学算法可以采用解析解法或者数值解法。
解析解法利用几何关系和三角函数等数学知识,直接计算出关节角度。
数值解法则通过迭代计算的方式,从初始角度开始逐步调整关节角度,使得末端逐渐接近目标位置。
2. 轨迹规划算法:根据机械手臂需要移动到的目标位置,通过规划合适的轨迹,使得机械手臂能够平滑地到达目标位置。
常用的轨迹规划算法包括直线插补、圆弧插补、S形曲线插补等。
这些算法可以考虑机械臂的速度、加速度和jerk 等运动参数,以达到平滑且快速的运动效果。
在实际应用中,3轴机械手臂的控制算法还需要考虑到多个因素,如动力学约束、碰撞检测等。
可以根据具体的机械手臂结构和控制需求,选择合适的算法进行实现和调整。
3轴机械手臂控制算法还可以包括以下几个方面:3. 运动规划算法:在实际操作中,机械手臂通常需要按照一定的轨迹运动,如沿着直线、圆弧或者其他复杂曲线进行运动。
运动规划算法就是根据机械手臂的运动范围、运动速度和加速度等参数,在保证机械手臂运动平滑和稳定的前提下,计算出机械手臂的位置和速度的变化。
4. 动力学控制算法:机械手臂的运动要遵循牛顿力学和动力学原理,动力学控制算法就是根据这些原理,计算出机械手臂各个关节受力的大小和方向,并进行相应的控制。
常用的动力学控制算法包括PD控制、模型预测控制等。
5. 状态估计算法:机械手臂控制算法还需要根据传感器提供的数据,实时地对机械手臂的状态进行估计,如关节角度、末端位置和速度等。
状态估计算法可以使用滤波算法,如卡尔曼滤波、粒子滤波等,来融合传感器数据,提高机械手臂状态的精准度和稳定性。
以上是常见的3轴机械手臂控制算法。
在实际应用中,还可以根据具体的需求和机械手臂的特点进行算法的选择和改进,以提高机械手臂的性能和运动效果。
三轴伺服机械手安全操作规程【最新版】
三轴伺服机械手安全操作规程一、目的强化安全管理,增强安全意识,确保安全生产,消除人的不安全行为,物的不安全状态,使安全生产做到有章可循,有据可依,特制定本规程。
二、使用范围本规程适用于我公司操作人员、工艺人员、技术人员。
三、控制器各功能键3.1 紧急停止按键:按此键切断电源,立即停止全部的动作,接触紧急停止,将开关按照标识方向旋转解锁后,电源开关,电源开关OFF后再次设定为ON;3.2 动作可能键:手动操作时,边按此键及各手动操作键,进行机械手动作。
如果过分按动作可能键,将不能进行手动操作。
3.3 电源:将电源设定为ON/OFF的状态。
3.4 停止:自动运转中,连续步进进给操作中,按此键,机械手停止。
3.5切换运转:表示运转模式画面。
3.6复位:报警灯显示时,清除报警;另外从各画面返回到运转模式画面。
3.7 菜单:想要显示菜单画面时,按此键。
3.8 帮助:表示各设定画面或操作画面中的帮助。
3.9取出侧落下侧:按取出侧,走行轴往产品成型侧行走;按落下侧,走形轴往远离产品成型侧行走。
3.10 Z+:使机械手向下行走,Z-:使机械手向下行走;Y+:使机械手沿着动模方向运动,Z-:使机械手沿着定模方向运动。
3.11 姿态复归/动作:使夹具板姿势动作,复归。
3.12 回转复归/动作:使夹具板回转动作,复归。
3.13 夹具开/闭:使夹具开,闭。
3.14 步进进/退:和自动运转相同顺序,执行1个步进的前进,返回动作。
四、操作步骤4.1开机4.1.1控制开关转向“ON”。
4.1.2不使用机械手而用半自动生产时,控制开关转向“ON”,或由技术人员将脱机信号短接。
4.1.3将注塑机的机械手功能打开:托模-功能-机械手选择使用。
4.2 检查并确认气压4.2.1检查气源、气压是否达到5kg/cm2以上。
4.2.2检查各功能键显示灯是否正常。
4.3选择夹具4.3.1根据制品侧有无水口选择夹具或吸盘。
4.3.2根据制品形状、大小、重量等选择吸盘规格、数量。
小型三轴机械手臂
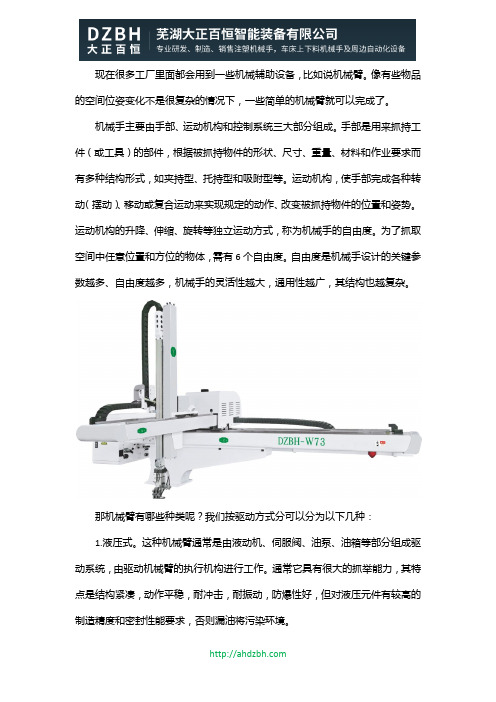
现在很多工厂里面都会用到一些机械辅助设备,比如说机械臂。
像有些物品的空间位姿变化不是很复杂的情况下,一些简单的机械臂就可以完成了。
机械手主要由手部、运动机构和控制系统三大部分组成。
手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作、改变被抓持物件的位置和姿势。
运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。
为了抓取空间中任意位置和方位的物体,需有6个自由度。
自由度是机械手设计的关键参数越多、自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。
那机械臂有哪些种类呢?我们按驱动方式分可以分为以下几种:1.液压式。
这种机械臂通常是由液动机、伺服阀、油泵、油箱等部分组成驱动系统,由驱动机械臂的执行机构进行工作。
通常它具有很大的抓举能力,其特点是结构紧凑,动作平稳,耐冲击,耐振动,防爆性好,但对液压元件有较高的制造精度和密封性能要求,否则漏油将污染环境。
2.气动式。
其驱动系统通常由气缸、气阀、气罐和空压机组成,其特点是气源方便,动作迅速、结构简单、造价较低、维修方便。
但难以进行速度控制,气压不可太高,故抓举能力较低。
3.电动式。
电力驱动是目前机械臂使用得最多的一种驱动方式。
其特点是电源方便,响应快,驱动力较大,信号检测、传递、处理方便,并可以采用多种灵活的控制方案。
驱动电机一般采用步进电机,直流伺服电机以及交流伺服电机。
还有一些有着专门用途的机械臂如医用护理机械臂、航天用机械臂、探海用机械臂以及排险作业机械臂等。
芜湖大正百恒智能装备有限公司是一家专业研发生产销售机械手的智能科技公司,其生产的各类机械手(双臂回斜式机械手、回斜式机械手、双截单臂回斜式机械手、立式注塑机专用机械手、单臂回斜式机械手、中型一轴伺服横走式机械手、中型两轴伺服横走式机械手、CNC悬挂式全伺服机械手、CNC开放式全伺服机械手、中型三轴牛头式伺服机械手、重型三轴牛头式机械手、重型三轴牛头式伺服机械手),类型丰富,控制精度高,性能优异,价格实惠,是您减省工人、提高效率、降低成本、提高产品品质、提升工厂形象的好选择。
三自由度机械手设计

三自由度机械手设计机械手是一种用于代替人手完成各种复杂或危险操作的机械装置。
三自由度机械手是指具有三个独立自由度的机械手。
在机械手设计中,三自由度机械手是较为简单且常见的一种类型。
三自由度机械手通常由机械臂和手爪组成,其中机械臂负责定位和移动,手爪负责抓取和放置物体。
机械臂由三个关节连接起来,每个关节都可以独立控制。
这意味着机械臂可以在三个轴上进行旋转和伸缩,从而实现空间中的定位和移动。
1.功能需求:首先需要明确机械手的功能需求,例如需要抓取什么类型的物体以及进行什么样的操作。
不同的功能需求会对机械手的结构和控制系统产生影响。
2.结构设计:机械手的结构设计包括关节、连接杆和运动范围等方面。
关节可以使用电机或气动缸等驱动装置实现,连接杆需要具有足够的强度和刚性。
运动范围的设计需要考虑机械手需要移动到的位置和空间,以及机械手的工作环境。
3.控制系统设计:机械手的控制系统包括传感器、运动控制器和驱动装置等。
传感器用于获取机械手当前的位置和姿态信息,运动控制器用于计算并控制机械手的运动轨迹,驱动装置用于实际驱动机械手的运动。
4.安全性设计:机械手操作时需要考虑其安全性。
例如,在操作过程中需要设置足够的安全间距,以避免机械手发生碰撞。
此外,机械手还可以通过使用力传感器和视觉系统等技术,实现对工作环境和物体的感知和识别,以提高操作的安全性和精确性。
在实际应用中,三自由度机械手广泛用于工业生产线上的自动化操作。
它可以完成物体的抓取、搬运、装配等任务,提高生产效率和质量。
同时,由于其结构相对简单,成本相对较低,因此也被广泛应用于教育和研究领域。
总而言之,三自由度机械手是一种常见的机械手类型,在设计中需要考虑功能需求、结构设计、控制系统设计和安全性设计等方面。
它在提高生产效率和质量方面具有重要的应用价值,并且具有较低的成本,因此在工业、教育和研究等领域广泛应用。
三自由机械手的结构设计
三自由度机械手的结构设计摘要本文简要介绍了机械手的概念,机械手的组成和分类,国内外的发展状况及发展前景。
本文对机械手进行总体方案设计,结合生产实际及理论确定了机械手的结构及动作过程,坐标型式和自由度数,并列出了机械手的技术参数。
设计出了机械手的驱动方案、控制方案,在进行控制方案的选取时进行了不同方案的优缺点的对比,最后确定了具体的控制方案。
在进行机械手控制器件的选取时,对控制器件选择进行了详细的分析,如对步进电机参数的具体选取。
最后介绍了利用可编程序控制器对机械手进行控制,同时叙述了可编程序控制器选取原则及工作过程,并绘制出了可编程序控制器外部接线图。
在用可编程序控制器控制时分为手动和自动两种工作方式,并绘制了自动工作方式的顺序功能图。
关键词机械手的概念,机械手控制器件,可编程序控制器(PLC)ThREE DEGREESOF FREEDOM MANIPULATORDESIGNABSTRACTThis paper introduces the concept of robot, robot the composition and classification of domestic and international developments and prospects.In this paper, an overall robot design, combined with production practice and theory to determine the structure of the manipulator and the action process, coordinate types and degrees of freedom, and lists the technical parameters of the manipulator.Designed a manipulator-driven program, control program, control program during the selection of different options when comparing the advantages and disadvantages, and finally determine the specific control program. Manipulator control device during the selection, the control device on a detailed analysis of options, such as the specific selection step motor parameters. Finally, the use of programmable logic controller tocontrol the manipulator, taking account of the pri nciples of PLC and process of selection, and draws out the external wiring diagram of PLC. Programmable Logic Controller in use when the work is divided into two kinds of manual and automatic mode, and the mapping of the automatic work order function map.KEYWORDS The concept of robot, robot control devices, programmable logic controller目录中文摘要 (1)英文摘要 (2)一、引言1.1简要介绍机械手的概念 (4)1.2机械手的组成和分类 (5)1.2.1机械手的组成 (5)1.2.2机械手的分类 (5)1.3国内外发展状况 (6)二、三轴自由度机械手的结构及动作过程 (7)2.1机械手的结构 (7)2.2机械手的动作过程 (8)2.3机械手的驱动方案设计 (9)2.4机械手的控制方案设计 (9)2.5机械手的座标型式与自由度 (10)2.6机械手的技术参数列表 (11)三、控制器件选型 (11)3.1步进电机及其驱动器选择 (11)3.2直流电机及其驱动器选择 (12)3.3旋转编码器的选择 (14)四、机械手的PLC控制设计 (15)5.1可编程序控制器的选择 (15)5.2可编程序控制器的工作过程 (16)总结 (19)致谢 (20)参考文献 (20)附录 (21)一、引言随着社会生产不断进步和人们生活节奏不断加快,人们对生产效率也不断提出新要求。
三轴机械手控制系统设计
58│DISCRETE MANUFACTURING│离散制造三轴机械手控制系统设计Design of Control System for Three-Axis Manipulator• 吉林化工学院信息与控制工程学院 朱建军 Zhu Jianjun 王鹏飞 Wang Pengfei• 中国石油吉林石化公司化肥厂 李元奎 Li Yuankui摘 要:本文介绍了三轴机械手的控制方法,分析了机械手逆运动学和规划运动路径的算法,设计的程序主要包括连续运动、抓取、码垛和轨迹规划。
实验结果表明,该系统能够生成预期的运动轨迹,完成对货物的抓取与摆放。
关键词:机械手 逆运动学 运动轨迹Abstract: This paper introduces the control method of the three-axis manipulator, analyzes the inverse kinematics of the manipulator and the algorithm of planning the motion path. The design process mainly includes continuous motion, grabbing, palletizing and trajectory planning. The experimental results show that the system can generate the expected motion trajectory and complete the grasping and placing of the goods.Key words: Robot Arm Inverse Kinematics Motion Track【中图分类号】TP241.2 【文献标识码】B 文章编号1606-5123(2019)11-0058-021 引言近年来伴随着工业自动化领域的技术革新,三轴机械手广泛地应用在高温、高压等恶劣环境中。
三轴摆臂机械手安全操作及保养规程

三轴摆臂机械手安全操作及保养规程前言三轴摆臂机械手是一种广泛应用于工业制造领域的自动化机械装置,它可以在不需要人工干预的情况下,完成各种规定好的动作和任务。
然而,在机械手的操作和维护过程中,我们必须注意一些安全规定,以减少潜在的危险和事故。
本文将针对三轴摆臂机械手的安全操作和保养规范进行详细阐述。
安全操作规范1. 操作前必须进行机械手的全面检查在任何情况下,操作前必须进行全面的机械手检查。
检查包括机械手的外观检查、机械结构检查、传感器检查等,这样可以确保机械手处于完好无损的状态。
对于任何机械失灵或传感器故障的维修和更换应在专业人员的监督下进行。
2. 人员必须接受机械手操作培训和安全教育在机械手的操作之前,所有的操作人员都应接受相关的培训和安全教育。
特别是对于机械手的控制系统,人员必须了解操作界面和控制流程,以确保操作的正确性和安全性。
3. 遵守机械手的操作程序机械手操作必须按照标准的程序来进行。
操作人员需要按照程序中规定的要求进行操作,确保安全。
任何未经授权的控制或操作都是不允许的。
4. 操作人员必须穿戴合适的个人保护用品在机械手的操作过程中,操作人员必须穿戴适合的个人保护用品,如防护手套、护目镜、耳塞等,以防止被机械手或机械手运动过程中的部件伤害。
对于机械手的操作人员必须在足够明亮的环境下工作。
5. 严格遵守指标限制和警告标识机械手上配备了指标限制和警告标识。
在操作前必须认真阅读这些标识,了解机械手的工作参数和限制,以确保对机械手的使用不超出其规格和限制,同时也要注意安全警告表示所示的危险区域。
6. 安全停车和清理在机械手的操作结束后,必须按照指定的程序对其进行安全停车和清理,这样可以确保设备处于安全状态,避免不必要的伤害。
保养规范1. 对机械手的日常保养机械手除了需要被定期进行维护和检修之外,还需要进行日常保养。
日常保养包括机械结构部件的清洁、光滑剂的润滑等操作。
同时,还需要检测并清理机械手传感器和相关电气设备。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
新乡学院2012届毕业设计小型三轴机械手论文作者姓名:__ 臧俊涛__所在院系:__机电工程学院_____所学专业:机械制造及其自动化***师:_ *** _论文完成时间:_20121年 5 月 12 日___目录内容摘要 (2)关键词 (2)Abstract (2)Key word (3)前言 (4)1.工业机械的发展 (4)1.1机械手在生产中的应用 (6)2 .三轴机械手的整体设计方案 (6)2.1 整体结构设计 (7)2.2 X轴设计 (8)2.3 Y轴设计 (11)2.4 Z轴设计 (13)2.5 夹具机械设计 (15)参考文献 (20)致谢 (21)内容摘要:工业机器手由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
生产中应用机械手可以提高生产的自动化水平,可以减轻劳动强度、保证产品质量、实现安全生产机械手的结构形式比较简单,通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的引用。
关键词:机器手效率简单适应性Abstract:Industrial machine by hand CaoZuoJi (mechanical body), controller, servo drive system and detection sensor, which is a kind of copy operation, automatic control, can repeat programming in 3 d space, can finish all kinds of assignments electromechanical integration of the automatic production equipment. Particularly suitable for many varieties, change of flexible production batch. It to help stabilize, improve product quality, raise efficiency in production, improve working conditions and product rapid renewal plays a very important role. Production application manipulator can be used to increase production of automation level, can reduce labor intensity, ensure the quality of products, and realize safe production of the manipulator structure form began comparing simple, general manipulator can quickly change working procedures, gooddaptability, so it continues to transform the production of medium and small batch production of a wide range of references. Key word: a manipulator,Efficiency; Simple; adaptability前言用于再现人手的的功能的技术装置称为机械手。
机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在工业生产中应用的机械手被称为工业机械手。
工业机械手是近代自动控制领域中出现的一项新技术,并已成为现代机械制造生产系统中的一个重要组成部分,这种新技术发展很快,逐渐成为一门新兴的学科——机械手工程。
机械手涉及到力学、机械学、电器液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
工业机械手是近几十年发展起来的一种高科技自动生产设备。
工业机械手也是工业机器人的一个重要分支。
他的特点是可以通过编程来完成各种预期的作业,在构造和性能上兼有人和机器各自的优点,尤其体现在人的智能和适应性。
机械手作业的准确性和环境中完成作业的能力,在国民经济领域有着广泛的发展空间。
机机械手是一种能自动控制并可从新编程以变动的多功能机器,他有多个自由度,可以搬运物体以完成在不同环境中的工作。
机械手的结构形式开始比较简单,专用性较强。
随着工业技术的发展,制成了能够独立的按程序控制实现重复操作,适用范围比较广的“程序控制通用机械手”,简称通用机械手。
由于通用机械手能很快的改变工作程序,适应性较强,所以它在不断变换生产品种的中小批量生产中获得广泛的引用。
1.工业机械的发展1.1工业机械手的起源现代工业机械手起源于20世纪50年代初,是基于示教再现和主从控制方式、能适应产品种类变更,具有多自由度动作功能的柔性自动化[]4产品。
机械手首先是从美国开始研制的。
1958年美国联合控制公司研制出第一台机械手。
他的结构是:机体上安装一回转长臂,端部装有电磁铁的工件抓放机构,控制系统是示教型的。
1962年,美国机械铸造公司在上述方案的基础之上又试制成一台数控示教再现型机械手。
商名为Unimate(即万能自动)。
运动系统仿造坦克炮塔,臂回转、俯仰,用液压驱动;控制系统用磁鼓最存储装置。
不少球坐标式通用机械手就是在这个基础上发展起来的。
同年该公司和普鲁曼公司合并成立万能自动公司(Unimaton),专门生产工业机械手。
1962年美国机械铸造公司也试验成功一种叫Versatran机械手,原意是灵活搬运。
该机械手的中央立柱可以回转,臂可以回转、升降、伸缩、采用液压驱动,控制系统也是示教再现型。
虽然这两种机械手出现在六十年代初,但都是国外工业机械手发展的基础。
1978年美国Unimate公司和斯坦福大学、麻省理工学院联合研制一种Unimate-Vic-arm型工业机械手,装有小型电子计算机进行控制,用于装配作业,定位误差可小于±1毫米。
美国还十分注意提高机械手的可靠性,改进结构,降低成本。
如Unimate公司建立了8年机械手试验台,进行各种性能的试验。
准备把故障前平均时间(注:故障前平均时间是指一台设备可靠性的一种量度。
它给出在第一次故障前的平均运行时间),由400小时提高到1500小时,精度可提高到±0.1毫米。
德国机器制造业是从1970年开始应用机械手,主要用于起重运输、焊接和设备的上下料等作业。
德国KnKa公司还生产一种点焊机械手,采用关节式结构和程序控制。
瑞士RETAB公司生产一种涂漆机械手,采用示教方法编制程序。
瑞典安莎公司采用机械手清理铸铝齿轮箱毛刺等。
日本是工业机械手发展最快、应用最多的国家。
自1969年从美国引进二种典型机械手后,大力研究机械手的研究。
据报道,1979年从事机械手的研究工作的大专院校、研究单位多达50多个。
1976年个大学和国家研究部门用在机械手的研究费用42%。
1979年日本机械手的产值达443亿日元,产量为14535台。
其中固定程序和可变程序约占一半,达222亿日元,是1978年的二倍。
具有记忆功能的机械手产值约为67亿日元,比1978年增长50%。
智能机械手约为17亿日元,为1978年的6倍。
截止1979年,机械手累计产量达56900台。
在数量上已占世界首位,约占70%,并以每年50%~60%的速度增长。
使用机械手最多的是汽车工业,其次是电机、电器。
预计到1990年将有55万机器人在工作。
第二代机械手正在加紧研制。
它设有微型电子计算机控制系统,具有视觉、触觉能力,甚至听、想的能力。
研究安装各种传感器,把感觉到的信息反馈,使机械手具有感觉机能。
目前国外已经出现了触觉和视觉机械手。
第三代机械手(机械人)则能独立地完成工作过程中的任务。
它与电子计算机和电视设备保持联系。
并逐步发展成为柔性制造系统FMS(Flexible Manufacturing system)和柔性制造单元(Flexible Manufacturing Cell)中重要一环。
1.2工业机械手在生产中的应用机械手是工业自动控制领域中经常遇到的一种控制对象。
机械手可以完成许多工作,如搬物、装配、切割、喷染等等,应用非常广泛[]5广泛。
在现代工业中,生产过程中的自动化已成为突出的主题。
各行各业的自动化水平越来越高,现代化加工车间,常配有机械手,以提高生产效率,完成工人难以完成的或者危险的工作。
可在机械工业中,加工、装配等生产很大程度上不是连续的。
据资料介绍,美国生产的全部工业零件中,有75%是小批量生产;金属加工生产批量中有四分之三在50件以下,零件真正在机床上加工的时间仅占零件生产时间的5%。
从这里可以看出,装卸、搬运等工序机械化的迫切性,工业机械手就是为实现这些工序的自动化而产生的。
目前在我国机械手常用于完成的工作有:注塑工业中从模具中快速抓取制品并将制品传诵到下一个生产工序;机械手加工行业中用于取料、送料;浇铸行业中用于提取高温熔液等等。
2.三轴机械手的总体设计方案本课题是电子行业三轴式机械手的设计,是机械手中最简单的一种。
本设计主要任务是完成机械手的结构以及传动方面设计。
在本章中对机械手的驱动机构等进行了初步确定。
因此,在机械手的执行机构、传动机构是本次设计的主要任务。
(本设计中用到的视图均为第三视角视图)2.1整体结构设计机械手即为三轴。
确定为X轴、Y轴、Z轴。
X轴为水平方向有效行程为300Y轴为水平面上垂直于X轴的方向有单效行程为300,Z轴为竖直方向垂直于XY轴,有效行程为100。
结构图如下图所示图2.1 整体结构2.2 X轴设计电机选择由于扭距不是很大,选用200v.200w的步进电机即可由于X轴行程较长又考虑到成本决定采用同步皮带传动。
为了方便编程和控制系统的分辨率较高可用1:1的传动比。
同步轮选用用传动如下图2.2传动示意图由于同步皮带需要张紧和为了装配方便。
故一个同步轮做成可以调节即可。
固定方式可做成如下结构。
初步确定中心距为375为了平稳可用两条直线滑轨支持,同步带位于两条滑轨之间。
两条滑轨中心距为65。
滑轨选用示间图如下图2.3 示间图每台机器都要整机复位,选用一个欧母龙的槽形光电感应器和不锈钢割制的1.5厚的感应片就可满足复位要求为了防止撞机和滑块滑出滑轨故在导轨一端做一个用聚氨酯做成的那限位装置由于X轴要带到动整个Z轴移动,上边所做的同步轮可调节机构可能会出现同步轮移动,造成同步带没有张紧,影响操作精度。