一种基于多步预测的自校正控制算法研究
预测控制

预测控制之探究摘要预测控制是近年来发展起来的一类新型的计算机控制算法。
由于它采用多步测试、滚动优化和反馈校正等控制策略,因而控制效果好,适用于控制不易建立精确数字模型且比较复杂的工业生产过程,所以它一出现就受到国内外工程界的重视,并已在石油、化工、电力、冶金、机械等工业部门的控制系统得到了成功的应用。
关键词:预测控制滚动优化反馈校正AbstractPredictive control is developed in recent years to a new type of computer control algorithm.Because it USES multi-step testing, roll optimization and feedback correction, the control strategies and control effect is good, suitable for control is not easy to build accurate digital model and more complex industrial production process, so it appeared at home and abroad by the attention of engineering, and has set up a file in the petroleum, chemical, electric power, metallurgy, machinery, and other departments of industry control systems have been successful application. Keywords: Predictive control rolling optimization feedback correction预测控制的起源预测控制是自动控制理论的一个分支。
多步预测自校正控制
多步预测自校正控制1 多步预测自校正控制介绍多步预测自校正控制业称为广义预测控制(Generalize Predictive Control ),它是再最小方差自校正控制和广义最小方差自校正控制得基础上发展起来得。
它保留了最小方差自校正控制的优点,同时增加了一些新亮点。
如最小方差控制中的预测模型,控制优化和反馈控制在多步预测控制中得到了继承,并且增加了多步预测,多步控制,实施一步,循环滚动等措施。
因而控制效果更好,系统的鲁棒性更强,更能适应复杂的过程或对象,使多步预测控制升华为一种性能卓越,适应性强的控制策略。
它不仅适用于稳定的开环系统,而且还适用于非最小相位系统,开环不稳定系统,以及非线性系统。
与最小方差自校正控制不同的是,预测控制可以预测未来多步模型的输出,并且在多步时段内控制也有多步作用,于是,在输出的预测,既有原来施加控制的影响,我们称之为零输入作用下的预测,简称为零输入预测,又有新加入的控制产生的作用,我们称之为零状态下的预测,简称为零状态预测。
按某种性能指标函数优化控制,并且仅实施最近的一步控制量。
从整个系统的控制过程看,每个周期的控制不是最优的,但它却是周期中最好的。
因此,对系统时刻可能遭受到的模型失配,参数变化,干扰等不良影响,系统都能及时的有效抵御。
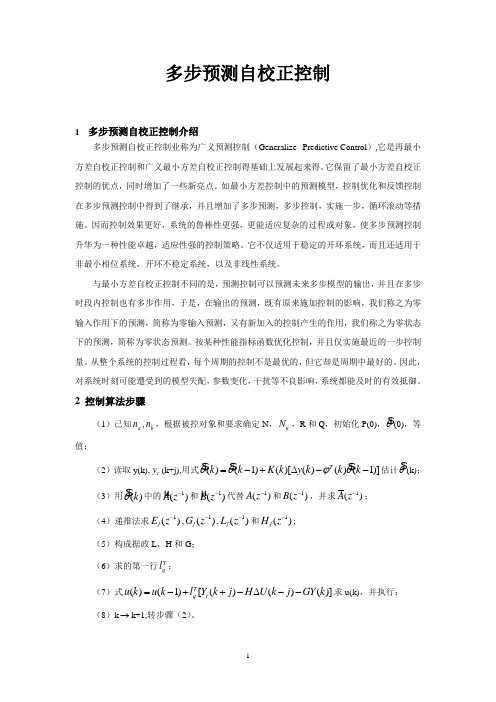
2 控制算法步骤(1)已知a n ,b n ,根据被控对象和要求确定N ,u N ,R 和Q ,初始化P(0), θ(0),等值;(2)读取y(k),r y (k+j),用式 ()(1)()[()()(1)]T k k K k y k k k θθϕθ=-+∆--估计 θ(k);(3)用 ()k θ中的 1()A z -和 1()B z -代替1()A z -和1()B z -,并求1()A z -; (4)递推法求1()j E z -,1()j G z -,1()j L z -和1()j H z -;(5)构成据政L ,H 和G ;(6)求的第一行T q l ;(7)式()(1)[()()()]T q r u k u k l Y k j H U k j GY k =-++-∆--求u(k),并执行;(8)k →k+1,转步骤(2)。
一种隐式广义预测自校正控制算法及仿真研究

An a g r t fi p ii e e a i e e c i e s l — u ng c n r la i u a i n l o ihm o m lc tg n r l d pr ditv e f— t ni o t o nd sm l to z
0 引言
在众 多 的预测控 制算 法 中 , 近年来 研究 最活跃 、 同时成果也 最 多的是 D W. l k 等 人于 18 . Ca e r 9 7年提
出的 广 义 预 测 控 制 ( e ea zd Pei ieC nrl G n rle rdc v o t , i t o
算 工作量 , 省 了时间 J 节 。
为 了验 证 隐式 算 法 的可 行 性 和优越 性 , 文将 该 对 其算法 进 行 介 绍 , 进 行 仿 真 研 究 , 析仿 真结 并 分 果, 总结 参数 变化对 整个 系统性 能 的影 响 。
G C) P 算法
。广 义 预 测 控 制 作 为 一 种新 型 的 远
( h s sD p r e tC a g nvr t , i in h n 3 0,C ia P yi eat n , h nf U i s y X n a g C a  ̄i 1 c m i ei j 8 10 hn )
Absr c : n r l e r d ci e c nr li e me h d o e t e i t e c n r l i c mb n s ta t Ge e a i d p e itv o to s a n w t o fr mo e prd c i o to , t o i e z v t e a a tg so ai u l o i h dv n a e fv ro sag rt hmsa oe,i h ssr n o sn s . Th d lp r mee sa e n ti sawh l t a to g rbu te s e mo e a a t r r o — d ut e y t ei pi i ag rt m ,i r al e u e hewokla e i d b h m l t lo ih i f c sg e t r d c d t r o d,s vn i y a igt me.I n r du e n i lct tito c sa mp ii a ih tc frg n r l e r d ci e s l rt mei o e e a i d p e itv ef—t n n o to , n a e i u ain o t. Th n a ay e h z u i g c n r l a d m k sa sm lto fi e n lz st e r s l nd s mm a ie h ifu n e f p r mee e ut a u s rz s t e n e c o a a t r— v re y o e tr s se p ro ma c . T e e ul l a it n n ie y tm e fr n e h r s t s s o t e s e irt n e sb lt ft e a g rt . h w h up ro iy a d f a iiiy o h lo i hm K e r s: e e aie r dit e c nto ;s l t n n y wo d g n r lz d p e c i o r l ef— u i g;i lcta i m ei v mp i i rt h tc
《自校正PID控制》课件

详细描述
自校正pid控制适用于各种需要高精度和高稳定性控制 的领域。在化工领域中,它可以用于控制化学反应过 程,提高产品质量和降低能耗;在电力领域中,它可 以用于控制发电机的输出功率,提高电力系统的稳定 性和可靠性;在机械领域中,它可以用于控制机器人 和精密机床的运动轨迹,提高制造精度和效率。此外 ,自校正pid控制还可应用于航空航天、交通、医疗等 领域。
实时性和嵌入式系统中的应用
随着嵌入式系统和实时计算技术的发展,自校正PID控制器可能会在 更多实时性和嵌入式系统中得到应用。
THANKS
感谢观看
总结词
简化控制系统设计
详细描述
自校正pid控制技术能够简化电机控制系统的设计过程 ,减少人工调整参数的工作量,提高系统的可维护性和 可扩展性。
自校正pid控制在温度控制系统中的应用
总结词:实现快速温度控制 总结词:提高温度均匀性 总结词:降低能耗
详细描述:自校正pid控制技术在温度控制系统中能够 实现快速温度控制,通过实时调整pid参数,减小温度 控制的超调和震荡,提高温度控制的稳定性和准确性。
分析自校正pid控制器的计算复杂性 ,评估其实时性要求和实现难度。
04
自校正pid控制算法的实现
离散化自校正pid控制算法
离散化自校正pid控制算法是将连续 的自校正pid控制算法离散化,以便 在数字计算机上实现。该算法通过离 散的时间步长来模拟连续的控制过程 ,并利用差分方程来描述系统的动态 行为。离散化自校正pid控制算法的 优点是易于实现和稳定性好,适用于 数字控制系统。
详细描述:在温度控制系统中,自校正pid控制技术能 够提高温度的均匀性,减小温度偏差,提高产品质量和 生产效率。
详细描述:自校正pid控制技术应用于温度控制系统, 能够根据实际需求实时调整温度控制参数,降低能耗, 实现节能减排。
基于期望响应的预测函数控制参考轨迹自校正方法

f lo t e pe t d e p s .The i o l w he x c e r s on e smul ton ho t a t p op s d a i s ws h t he r o e me h c n e ul i f v a e t od a r s t n a or bl
维普资讯
第5 9卷
第 1 期
化
工
学
报
V o . 9 NO. 15 1
20 0 8年 1月
J u n l o C e c l Id sr a d En iern o r a f h mia n u ty n gn e ig
Jn ay 2 0 a ur 0 8
基 于期 望 响 应 的 预 测 函数 控 制
参 考 轨迹 自校 正方 法
沈 国 良 ,赵 均 ,钱 积 新
( 江 大 学 工 业 控 制 技 术 研 究 所 ,浙 江 杭 州 3 0 2 ) 浙 10 7
摘 要 :采 用 指 数 律 参 考 轨 迹 的传 统 预测 函数 控制 ( F ,系 统 动 态 响 应 无 法 预先 估 计 ,不 能 直 接 按 照 指 定 的 轨 P C) 迹 整 定 动 态 响 应 。本 文提 出 了一 种 预测 函数 控 制 参 考 轨 迹 自校 正 策 略 。基 于 事 先 规 定 的期 望 响 应 ,对 指 数 律 参 考 轨 迹 的 衰 减 系 数 进 行 实 时 在 线 滚 动 优 化 ,保 证 预 测 时域 内 的参 考 轨 迹 最 大 幅 度 地 贴 近 期 望 轨 迹 ,使 得 系 统 响
基于模型预测控制及遗传算法的三线性系统校正研究
基于模型预测控制及遗传算法的三线性系统校正研究模型预测控制(Model Predictive Control,简称MPC)是一种常用于工业控制系统的高级控制策略。
它通过建立系统数学模型,并基于该模型进行预测和优化,来指导控制器的决策。
遗传算法(Genetic Algorithm,简称GA)则是一种基于进化思想的优化算法,在搜索空间中通过模拟自然选择和遗传变异的过程找到最优解决方案。
本文将介绍基于模型预测控制及遗传算法的三线性系统校正研究。
基于模型预测控制的系统校正是指通过建立系统的数学模型,并使用该模型进行在线优化,来调整系统的参数以实现更好的控制效果。
对于三线性系统的校正,我们需要考虑系统的非线性特性以及参数空间的高维度。
首先,我们需要建立三线性系统的数学模型。
三线性系统是一种具有三个输入和一个输出的多变量系统,其输入和输出之间存在着非线性关系。
通过对这个系统进行建模,可以将其表示为一个多变量非线性方程。
根据实际问题的复杂程度,我们可以选择合适的数学建模方法,例如利用物理方程、实验数据拟合或者系统辨识等方式来获取系统模型。
接下来,我们可以使用模型预测控制来进行三线性系统的校正。
模型预测控制首先需要在每个控制周期内进行系统状态的预测。
在三线性系统中,由于存在非线性关系,所以需要在每个控制周期内进行多步预测。
通过使用系统模型,我们可以将未来的系统状态变量进行预测,并计算出对应的控制策略。
然后,根据这些预测结果,我们可以优化当前的控制信号,以获得最优的控制效果。
这个过程可以通过求解一个优化问题来实现,一般可以使用数学优化算法来求解。
在这里,我们引入遗传算法作为优化算法的一种选择。
遗传算法是一种基于自然选择和遗传变异思想的优化算法。
它通过对候选解进行适应度评估、选择、交叉和变异等操作,来模拟生物进化的过程。
在三线性系统的校正中,我们可以将待优化的控制参数作为基因编码,并使用遗传算法搜索参数空间中的最优解。
基于多目标优化的自适应控制技术研究
基于多目标优化的自适应控制技术研究一、引言随着科学技术的不断进步,自适应控制技术已经得到了广泛的应用。
在实际应用中,多目标自适应控制技术已经成为了一种非常重要的控制策略,它可以在实现系统优化的同时,保证系统的稳定性和可靠性。
为了更好地研究多目标自适应控制技术,本文将从相关基础理论出发,对其进行系统分析和研究。
二、多目标优化控制基础多目标自适应控制技术是指在满足系统控制需求的前提下,同时优化多个目标。
其目的在于寻求一种控制策略,使得多个目标同时得到优化。
在实际应用过程中,多目标自适应控制技术不仅可以用于单个系统的优化控制,还可以用于多系统协同控制,实现多种目标的优化。
三、多目标自适应控制技术研究1、多目标控制策略设计多目标控制策略设计是多目标自适应控制技术研究的基础和核心。
多目标控制策略设计包括目标函数的设定、控制变量的选取、控制器的构建等。
在多目标自适应控制技术的研究中,优化算法是至关重要的一个方面,它可以根据目标函数的不同重要度,对控制变量进行优化处理,从而最大程度地实现多目标的优化控制。
2、多目标控制算法研究多目标控制算法是多目标自适应控制技术研究的关键环节。
多目标控制算法需要在控制器设计的基础上,对目标函数进行优化处理,从而得到更加优化的控制器。
在多目标控制算法的研究中,主要有遗传算法、粒子群算法、模拟退火算法等。
3、多目标控制实验研究多目标自适应控制技术的实验研究是验证其有效性和可靠性的重要手段。
多目标控制实验研究需要确定实验参数、建立系统模型、设计实验方案等。
在实验过程中,需要采集数据并分析结果,从而得到多目标自适应控制技术的实际控制效果。
四、应用领域多目标自适应控制技术在生产制造、环境监测、交通运输等领域都有广泛应用。
1、生产制造领域在生产制造领域,多目标自适应控制技术可以用于生产线的自动化控制、质量检测等方面。
通过多目标自适应控制技术,可以有效提高生产效率和质量。
2、环境监测领域在环境监测领域,多目标自适应控制技术可以用于空气、水质等环境参数的监测和控制。
基于自组织算法的多智能体控制技术研究

基于自组织算法的多智能体控制技术研究随着智能化时代的到来,多智能体技术成为了一个备受关注的领域。
在多智能体系统中,每个智能体都有不同的行为和处理能力,并且将相互协作以完成特定的任务。
然而,如何保证多智能体之间的协作以及如何优化智能体的行为仍然是一个挑战。
自组织算法是解决上述问题的一种有效方式。
自组织算法指的是一类算法,它们依赖于局部信息和简单的规则,使系统在没有中央控制或全局信息的情况下自我组织。
自组织算法广泛应用于多智能体系统中,以实现智能体之间协同行动和优化任务。
在多智能体控制中,自组织算法能够提供许多优势。
首先,自组织算法可以减少系统的互相作用,从而减少全局信息的收集和传输需求。
此外,自组织算法具有高度灵活和鲁棒性,即使在某些异常情况下,它们也能够自我调节以达成任务。
自组织算法的应用也非常广泛。
例如,在智能交通系统中,自动驾驶汽车可以使用自组织算法,以确保汽车的协调行动,达成一致性驾驶。
此外,在无人机中,自组织算法可以帮助无人机实现协调监控、目标搜索和指示。
在多智能体控制领域中,存在许多不同的自组织算法,如蚁群算法、人工鱼群算法、群智能算法等,这些算法都在不同的情况下提供了有效的解决方案。
蚁群算法是一种基于模拟自然界中蚂蚁行为的求解优化问题的方法。
在蚁群系统中,每个蚂蚁只能探索周围环境,并在个人和整个蚁群的行为规则上进行决策。
蚂蚁探索过程中会释放信息素,其他蚂蚁会根据信息素浓度选择探索路径,从而使整个蚁群以最短路线集中在一起。
人工鱼群算法是一种基于自然界鱼群行为的求解优化问题的方法。
该算法通过模拟鱼群行为来实现任务的协同。
在人工鱼群系统中,每个鱼有一种优化解,它在搜索空间中游动来寻找更优解,同时与周围的鱼交互学习。
群智能算法是基于模拟自然界中群体行为的方法。
例如,群体中的鸟类和袋鼠会在生态系统中协同行动。
在群智能系统中,算法模拟群体行为,以解决优化问题或达成集体行动目标。
总之,基于自组织算法的多智能体控制技术在现实世界中具有许多应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 算 法设计
选 取性 能指 标 函数 为
. E{∑ [( +) Y 七 j] , = y七 _ 一r +) 『 ( 『 +
J 0 =Ⅳ
N
1 模 型 描 述
预 测 控 制 采 用 受 控 自 回 归 滑 动 平 均 过 程 模 型
( A I 引, C RMA) 它具有可描述非平稳扰动 、 可使系统
一
输 出稳 态误 差 为 0、 消 除 阶 跃 扰 动 引起 的偏 差 的特 可 点. 其表 达形 式 为
A z 。 , ) ( ) ( 一 ) C z 七/ 1 z ( ) (一)( = z u k 1 + (一)( ) ( 一 ) 1 )
即
( 一) ( )=B Z ‘A ( 一1 z 。Y k ( 一) u k )+C( 一) k ( ) Z ( ) 2 式中 , Z A( 一)=1+az ’ l一 +… +a 一 B( 一 )=b z ; Z o+ bz l一 +… + n 一 c z 1+ l一 bb ; ( 一)= CZ +… + n 一 A Z Cc ~; u Z ( ) ( )一 ( 七 = 七 “ k一1 ; Z )A( 一)=( 1一Z A( 一 )= 一) Z
稳定 系统 以及 非线 性 系 统 … . 义预 测 控 制 的研 究 逐 广 渐 拓展 , 其应 用范 围 十分广 泛 , 在 网络遥 操作 机器 人 如 系统 、 温控 系统 以及化 工生 产 中 J与最 小 方差 自校 . 正控制 不 同的是 , 预测 控 制 可 以预测 未来 多 步 模 型 的 输 出, 并且在 多步 时段 内 , 制也 有 多步作 用 . 控 于是 , 对 输 出的预测 , 既有 原来 施加 控制 的影 响 , 之 为零输 人 称
第 6卷第 1 期
2 0l 0年 1月
沈阳工程学院学报( 自然科学版 )
Junl fS e yn ntueo n ier g Na rl cec ) o ra o h n a gIstt f gn ei ( t a S i e i E n u n
Vo . N l 16 Jn 2 O a . Ol
Z一 1+ l Z一’+ … + H + ‘ I ¨; f 石
: a — a f l ,
—
种 性 能卓越 、 适应 性 强 的控 制 策略 . 它不 仅适用 于稳
( 1≤f ≤
定 的开环 系统 , 而且 还适 用 于非最 小相 位 系统 开环不
n ) + =一a a 。, 。 0=1 { k } 白噪 声 序 列 , ; ( ) 为 且 { 七 } 0 E{ ( ) = . ( ) = , 七 } 在这 个模 型 中 , 定 被 控 对 象 的纯 延 时 d=1 如 假 , 果 它大 于 1 则 多项式 B( ) , Z 中前 d一1 系数 为 0 项 . 做如 下约 定 : y k+『为未来 ( +『 ( j ) 七 J 时刻预测模 型的输 出 ;’ 足+ ) )( ,
最优输出预测估计;( j ) y + ) Y ( + I) y _ + l = ( _ 一 ’ 足 k 为 k 『
( 出) 输 预测误差. 这里 J= ,, . ^为预测长度 . 12 ・Ⅳ,, ・
近的一步控制量 , 从整个系统的控制过程看 , 每个周期 的控 制虽不 是全 局最 优 的 , 但却 是该 周期 中最 好 的. 因 此, 对系统可能遭遇到的模型失配、 数变化 、 参 干扰等 不良影响 , 系统都能及时有效地抵御.
作 用下 的预 测 , 简称 为零输 入预 测 , 又有新 加入 的控 制
jk为基于 k和以前时刻 的输 输 出数据 { ()y i, l) “ i,()
f }对未来( . 时刻预测模型输出的最优估计 , ≤七 , + ) 『 简称
产生 的作用 , 之为零 状态 下 的预测 , 称 简称 为零 状态 预 测. 果按 某种性 能指 标 函数优 化控 制 , 且仅 实施 最 如 并
有鲁棒性强、 自适应 能力强的优点. 关键 词 :多步预测 ; 自校正控 制 ; A I C R MA模型 ; 鲁棒性 中圈分类号 : P 7 T 23 文献标识 码 : A 文章编号 :17 6 3—10 (0 0 0 一 O4— 2 6 3 2 1 ) 1 O 6 0
多步 预测 自校 正控 制 也 称 为广 义 预测 控 制 , 是 它 在最 小方 差 自校 正控 制 和广义 方差 自校 正控制 的基 础 上发 展起 来 的. 它保 留了最小 方差 自校 正控 制的优 点 , 同时增加 了一 些新亮 点 . 如最 小 方 差 控 制 中 的预 测 模 型、 控制优 化 和反馈 控 制 在 多步 预 测 控 制 中都 得 到 了 继 承 , 且增 加 了多步 预测 、 并 多步 控制 、 实施 一步 、 循环 滚 动等措 施 . 因而控 制 效 果 更 好 , 统 的 鲁棒 性 更 强 , 系 更 能适应 复杂 的过 程 或 对象 , 多步 预 测 控 制升 华 为 使
一
种 基 于 多步预 测 的 自校 正 控 制 算 法研 究
鞠 增 伟
( 华 ) 南 303
摘
要:预测控制可 以预测 未来 多步模型的输 出, 并且在 多堂 时段 内, 制也有 多步作 用. 控 采用受控 自回 归积 分滑动 平
均过程模 型 , 选择一定的性能指标 函数 , 设计 了一种 多变预测 自校 正控 制 间接 算法. 同时利用 实例验 证 了该控 制 策略 具
牧 稿 日期 : 0 9—0 20 9—1 4
∑ [A ( + 1]) r uk 卜 ) j
() 3
作者简介 :鞠增伟( 94一) 男 , 18 , 山东聊城 人, 硕士研究生