Path-tracking Control of Underactuated Ships Under Tracking Error Constraints
基于反步法的四旋翼无人飞行器混合增稳控制
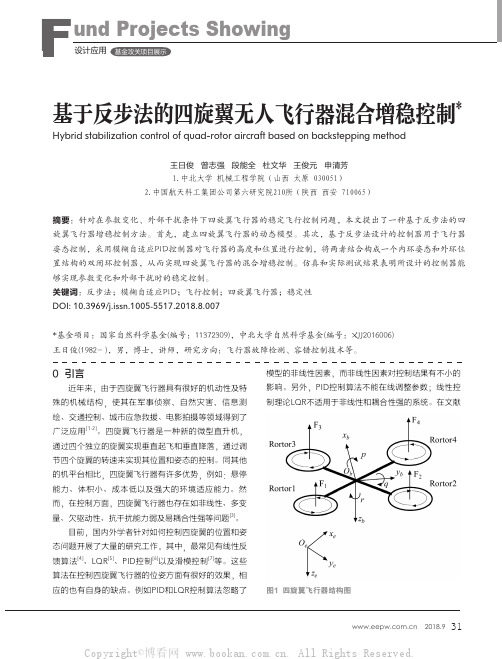
图1 四旋翼飞行器结构图3137 2018.9[8]中,应用了一个集成反步控制器来控制四旋翼飞行器的水平位置和高度。
滑模控制算法具有简单、可靠的优点,是一种很有效的控制算法,但是它也带来了颤振现象[9]。
文献[10]提出了一种基于解析模型的滑模PD控制器来实现对旋翼的控制。
文献[11]针对姿态稳定化问题,采用混合反步算法来创建姿态角加速度函数。
整体反步控制算法也可以用于四旋翼的控制,不足的是,整体反步算法需要有精确的模型,且其鲁棒性较差。
现有的许多研究均表明,在系统不确定性条件下,滑模控制器有很好的控制效果,但它有很高的增益和控制输入。
因此,本文针对在参数变化、外部干扰条件下四旋转动的转子对(1,4)和顺时针转动的转子对(2,3)之间的相对速度来控制机的偏航角。
推力的控制是通过调节四个转子的速度来实现的。
定义系统中两个参考坐标系分别为惯性坐标系和机体坐标系。
惯性参考系为O e(x e y e z e),主体参考系为O b(x b y b z b)。
四旋翼机的绝对位置由X=[x,y,z]T和姿态角Q=[φ,θ,ψ]T决定,其中姿态角包含三个方向角度,分别是滚转角(绕轴)、俯仰角(绕y轴)、偏航角(绕z轴)。
由一个在低速环境下的简单四旋翼飞行器动态模型可以得到:图2 模糊自适应PID控制器结构框图(a)俯仰角 (b)滚转角 (c)偏航角图3 姿态控制对比实验图4 高度控制对比实验其中,J r是与空气动力阻力相关的阻力系数四旋翼重心和每个转子中心之间的距离x,y,z方向的惯性矩。
定义以下变量(2)通过引入矢量X=[x1,x2,…x12]量,则四旋翼飞行器模型的状态空间形式为2 增稳控制器的设计本文所设计的增稳控制器采用双闭环控制结构用于飞行器高度和位置控制的模糊自适应成位置外环,用于飞行器姿态控制的反步控制器构成姿态内环。
2.1 模糊自适应PID控制器模糊自适应PID方法是基于应用模糊逻辑概念的智能算法。
Bipedal Walking on Rough Terrain Using Manifold Control

Bipedal Walking on Rough Terrain Using Manifold ControlTom Erez and William D.SmartMedia and Machines Lab,Department of Computer Science and EngineeringWashington University in St.Louis,MOetom,wds@Abstract—This paper presents an algorithm for adapting periodic behavior to gradual shifts in task parameters.Since learning optimal control in high dimensional domains is subject to the’curse of dimensionality’,we parametrize the policy only along the limit cycle traversed by the gait,and thus focus the computational effort on a closed one-dimensional manifold,embedded in the high-dimensional state space.We take an initial gait as a departure point,and iterate between modifying the task slightly,and adapting the gait to this modification.This creates a sequence of gaits,each optimized for a different variant of the task.Since every two gaits in this sequence are very similar,the whole sequence spans a two-dimensional manifold,and combining all policies in this 2-manifold provides additional robustness to the system.We demonstrate our approach on two simulations of bipedal robots —the compass gait walker,which is a four-dimensional system, and RABBIT,which is ten-dimensional.The walkers’gaits are adapted to a sequence of changes in the ground slope,and when all policies in the sequence are combined,the walkers can safely traverse a rough terrain,where the incline changes at every step.I.INTRODUCTIONThis paper deals with the general task of augmenting the capacities of legged robots by using reinforcement learn-ing1.The standard paradigm in Control Theory,whereby an optimized reference trajectory is foundfirst,and then a stabilizing controller is designed,can become laborious when a whole range of task variants are considered.Standard algo-rithms of reinforcement learning cannot yet offer compelling alternatives to the control theory paradigm,mostly because of the prohibitive effect of the curse of dimensionality. Legged robots often constitute a high-dimensional system, and standard reinforcement learning methods,with their focus on Markov Decision Processes models,usually cannot overcome the exponential growth in state space volume. Most previous work in machine learning for gait domains required either an exhaustive study of the state space[1], or the use of non-specific optimization techniques,such as genetic algorithms[2].In this paper,we wish to take a first step towards efficient reinforcement learning in high-dimensional domains by focusing on periodic tasks.We make the observation that while legged robots have a high-dimensional state space,not every point in the state space represents a viable pose.By definition,a proper gait would always converge to a stable limit cycle,which traces a closed one-dimensional manifold embedded in the 1The interested reader is encouraged to follow the links mentioned in the footnotes to section IV to see movies of our simulations high-dimensional state space.This is true for any system performing a periodic task,regardless of the size of its state space(see also[3],section3.1,and[4],figure19,for a validation of this point in the model discussed below).This observation holds a great promise:a controller that can keep the system close to one particular limit cycle despite minor perturbations(i.e.has a non-trivial basin of attraction)is free to safely ignore the entire volume of the state space. Finding such a stable controller is far from trivial,and amounts to creating a stable gait.However,for our purpose, such a controller can be suboptimal,and may be supplied by a human tele-operating the system,by leveraging on passive dynamic properties of the system(as in section IV-A),or by applying control theory tools(as in section IV-B).In all cases,the one-dimensional manifold traced by the gait of a stable controller can be identified in one cycle of the gait, simply by recording the state of the system at every time step. Furthermore,by querying the controller,we can identify the local policy on and around that manifold.With these two provided,we can create a local representation of the policy which generated the gait by approximating the policy only on and around that manifold,like a ring embedded in state space,and this holds true regardless of the dimensionality of the state space.By representing the original control function in a compact way we may focus our computational effort on the relevant manifold alone,and circumvent the curse of dimensionality as such a parametrization does not scale exponentially with the number of dimensions.This opens a door for an array of reinforcement learning methods(such as policy gradient)which may be used to adapt the initial controller to different conditions,and thus augment the capacities of the system.In this article we report two experiments.Thefirst studies the Compass-Gait walker([9],[10],[11],a system known for its capacity to walk without actuation on a small range of downward slopes.The second experiment uses a simulation of the robot RABBIT[3],a biped robot with knees and a torso,but no feet,which has been studied before by the control theory community[5],[4],[6].Thefirst model has a four-dimensional state space,and the second model has10 state dimensions and4action dimensions.By composing together several controllers,each adapted to a different incline,we are able to create a composite controller that can stably traverse a rough terrain going downhill.The same algorithm was successfully applied to the second system too, although the size of that problem would be prohibitive formost reinforcement learning algorithms.In the following wefirst give a short review of previous work in machine learning,and then explain the technical aspects of constructing a manifold controller,as well as the learning algorithms used.We then demonstrate the effec-tiveness of Manifold Control by showing how it is used to augment the capacities of existing controllers in two different models of bipedal walk.We conclude by discussing the potential of our approach,and offer directions for future work.II.P REVIOUS W ORKThe generalfield of gait design has been at the focus of mechanical engineering for many years,and recent years saw an increase in the contribution from the domain of machine learning.For example,Stilman et al.[7]studied an eight-dimensional system of a biped robot with knees, similar to the one studied below.They showed that in their particular case the dimensionality can be reduced through some specific approximations during different phases.Then, they partitioned the entire volume of the reduced state space into a grid,and performed Q-learning using a simulation model of the system’s dynamics.The result was a robot walker that can handle a range of slopes around the level horizontal plane.In addition,there is a growing interest in recent years in gaits that can effectively take advantage of the passive dynamics(see the review by Collins et al.[8]for a thorough coverage).Tedrake[9]discusses several versions the com-pass gait walker which were built and analyzed.Controllers for the compass gait based on an analytical treatment of the system equations wasfirst suggested by Goswami et al.[10],who used both hip and ankle actuation.Further results were described by Spong and Bhatia[11],where the case of uneven terrain was also discussed.Ramamoorthy and Kuipers[12]suggested hybrid control of walking over irregular terrain by seeking inspiration from human walking.III.M ANIFOLD C ONTROLA.The Basic Control SchemeThe basic idea in manifold control is to focus the com-putational effort on the limit cycle.Therefore,the policy is approximated using locally activated processing elements (PEs),positioned along the manifold spanned by the limit cycle.Each PE defines a local policy,linear in the position of the state relative to that PE.When the policy is queried with a given state x,the local policy of each PE is calculated as:µi(x)=[1(x−c i)T M T]G i(1) where c i is the location of element i,M is a diagonal matrix which determines the scale of each dimension,and G i is an (n+1)-by-m matrix,where m is the action dimension and n is the number of state space dimensions.G i is made of m columns,one for each action dimension,and each column is an(n+1)-sized gain vector.Thefinal policy u(x)is calculated by mixing the local policies of each PEaccordingFig.1.Illustrations of the models used.On the left,the compass-gait walker:the system’s state is defined by the two legs’angles from the vertical direction and the associated angular velocities,for a total of four dimensions. Thisfigure also depicts the incline of the sloped ground.On the right, RABBIT:the system’s state is defined bt the angle of the torso form the vertical direction,the angles between the thighs and the torso,and the knee angles between the shank and the thigh.This model of RABBIT has ten state dimensions,where at every moment one leg isfixed to the ground, and the other leg is free to swing.to a normalized Gaussian activation function,usingσas a scalar bandwidth term:w i=exp(−(x−c i)T M TσM(x−c i)),(2)u(x)= n i=1w iµitraverse a path of higher value(i.e.collect more rewards,or less cost)along its modified limit cycle.1)Defining the Value Function:In the present work we consider a standard nondiscounted reinforcement learning formulation with afinite time horizon and no terminal costs. More accurately,we define the Value Vπ(x0)of a given state x0under afixed policyπ(x)as:Vπ(x0)= T0r(x t,π(x t))dt(4) where r(x,u)is the reward determined by the current state and the selected action,T is the time horizon,and x t is the solution of the time invariant ordinary differential equation ˙x=f(x,π(x))with the initial condition x=x0,so thatx t= t0f(xτ,π(xτ))dτ.(5) 2)Approximating the Policy Gradient:With C being the locations of the processing elements,and G being the set of their local gains,we make use of a method,due to[14],of piecewise estimation of the gradient of the value function at a given initial state x0with respect to the parameter set G. As Munos showed in[14],from(4)we can write∂V∂G,(6) and for the general form r=r(x,u)we can decompose∂r/∂G as∂r∂u ∂u∂x∂xFig.2.The path used to test the compass gait walker,and an overlay of the walker traversing this path.Note how the step length adapts to the changing incline.the forward swing,but will undergo an inelastic collision with thefloor during the backward swing.At this point it will become the stance leg,and the other leg will be set free to swing.The entire system is placed on a plane that is inclined at a variable angleφfrom the horizon.In the interests of brevity,we omit a complete description of the system dynamics here,referring the interested reader to the relevant literature[15],[10],[11].Although previous work considered actuation both at the hip and the ankle,we chose to study the case of actuation at the hip only.The learning phase in this system was done using simple stochastic gradient ascent,rather than the elaborate policy gradient estimation described in section III-B.2.The initial manifold was sampled at an incline ofφ=−0.05(the initial policy is the zero policy,so there were no approximation errors involved).One shaping iteration consisted of the following:first,G was modified to G tent=G+ηδG, withη=0.1andδG drawn at random from a multinormal distribution with unit covariance.The new policy’s perfor-mance was measured as a sum of all the rewards along20 steps.If the value of this new policy was bigger than the present one,it was adopted,otherwise it was rejected.Then, a newδG was drawn,and the process repeated itself.After 3successful adoptions,the shaping iterations step concluded with a resampling of the new controller,and the incline was decreased by0.01.After10shaping iteration steps,we had controllers that could handle inclines up toφ=−0.14.After another10 iteration steps with the incline increasing by0.005,we had controllers that could handle inclines up toφ=0.0025(a slight uphill).This range is approxmately double the limit of the passive walker[15].Finally,we combined the various controllers into one composite controller.This new controller used1500charts to span a two-dimensional manifold embedded in the four-dimensional state space.The performance of the composite controller was tested on an uneven terrain where the incline was gradually changed fromφ=0toφ=0.15radians, made of“tiles”of variable length whose inclines were0.01 radians apart.figure III-B.2shows an overlay of the walker’s downhill path.A movie of this march is available online.2B.The Uphill-Walking RABBIT RobotWe applied manifold control also to simulations of the legged robot RABBIT,using code from Prof.Jessy Grizzle that is freely available online[16].RABBIT is a biped robot with a torso,two knees and no feet(seefigure1b.),and is actuated at four places:both hip joins(where thighs are actuated against the torso),and both knees(where shanks are actuated against the thighs).The simulation assumes a stance leg with no slippage,and a swing leg that is free to move at all directions until it collides inelastically with the floor,and becomes the stance leg,freeing the other leg to swing.This robot too is modeled as a nonlinear system with impulse effects.Again,we are forced to omit a complete reconstruction of the model’s details,and refer the interested reader to[4],equation8.This model was studied extensively by the control theory community.In particular,an optimal desired signal was derived in[6],and a controller that successfully realizes this signal was presented in[4].However,all the efforts were focused on RABBIT walking on even terrain.We sought a way to augment the capacities of the RABBIT model,and allow it to traverse a rough,uneven terrain.We found that the controller suggested by[4]can easily handle negative (downhill)incline of0.2radiand and more,but cannot handle positive(uphill)inclines.3.Learning started by approximating the policy from[4]as a manifold controller,using400processing elements with a mean distance of about0.03state space length units.The performance of the manifold controller was indistinguishable to the naked eye from the original controller,and perfor-mance,as measured by the performance criterion C3in[6] (the same used by[4]),was only1%worse,probably due to minor approximation errors.The policy gradient was estimated using(6),according to a simple reward model:r(x,u)=10v x hip−1Fig.3.The rough terrain traversed by RABBIT.Since this model has knees,it can walk both uphill and downhill.Note how the step length adapts to the changing terrain.The movie of this parade can be seen at tt http:/2b8sdm,which is a shortcut to the YouTube website.where v xhip is the velocity of the hip joint(where the thighand the torso meet)in the positive direction of the X-axis, and u max is a scalar parameter(in our case,chosen to be 120)that tunes the nonlinear action penalty and promotes energetic efficiency.After the initial manifold controller was created,the system followed a fully automated shaping protocol for 20iterations:at every iteration,∂V/∂G was estimated, andηwasfixed to0.1%of|G|.This small learning rate ensured that we don’t modify the policy too much and lose stability.The modified policy,assumed to be slightly better, was then tested on a slightly bigger incline(the veryfirst manifold controller was tried on an incline of0rad.,and in every iteration we increased the incline in0.003rad.).This small modification to the model parameters ensured that the controller can still walk stably on the incline.If stability was not lost(as was the case in all our iterations),we resampled u(·;C,G new)so that C adj overlapped the limit cycle of the modified system(with the new policy and new incline),and the whole process repeated.This procedure allowed a gradual increase in the system’s maximal stable incline.Figure4depicts the evolution of the stability margins of every ring along the shaping iteration:for every iteration we present an upper(and lower)bound on the incline for which the controller can maintain stability.Thiswas tested by setting a test incline,and allowing the system to run for10 seconds.If no collapse happened by this time,the test incline was raised(lowered),until an incline was found for which the system can no longer maintain stability.As this picture shows,our automated shaping protocol does not maintain a tight control on the stability margins-for most iterations,a modest improvement is recorded.The system’s nonlinearity is well illustrated by the curious case of iteration9,where the same magnitude ofδG causes a massive improvement, despite the fact that the control manifold itself didn’t change dramatically(seefigure5).The converse is also true for some iterations(such as17and18)there is a decrease in the stability margins,but this is not harming the overall effectiveness,since these iterations are using training data obtained at an incline that is very far from the stability Fig.4.Thisfigure shows the inclines for which each iteration could maintain a stable gait on the RABBIT model.The diagonal line shows the incline for which each iteration was trained.Iteration0is the original controller.The initial manifold control approximation degrades most of the stability margin of the original control,but this is quickly regained through adaptation.Note that both the learning rate and the incline change rate were held constant through the entire process.The big jump in iteration 9exemplifies the nonlinearity of the system,as small changes may have unpredictable results,in this case,for the best.margin.Finally,three iterations were composed together,and the resulting controller successfully traversed a rough terrain that included inclines from−0.05to0.15radians.Figure3 shows an overlay image of the rough path.V.C ONCLUSION AND F UTURE W ORKIn this paper we present a compact representation of the policy for periodic tasks,and apply a trajectory-based policy gradient algorithm to it.Most importantly,the methods we present do not scale exponentially with the number of dimensions,and hence allow us to circumvent the curse of dimensionality in the particular case of periodic tasks.By following a gradual shaping process,we are able to create robust controllers that augment the capacities of existing systems in a consistent way.33.54−1.5−0.2anglea n g . v e l.anglea n g . v el.anglea n g . v e l.anglea n g . v el.anglea n g . v e l.anglea n g . v el.anglea n g . v e l.anglea n g . v el.anglea n g . v e l.anglea n g . v el.anglea n g . v e l.anglea n g . v el.anglea n g . v e l.anglea n g . v e l.Fig.5.A projection of the manifold of several stages of the shaping process for the RABBIT model.The top row shows the angle and angular velocity between the torso and the stance thigh,and the bottom row shows the angle and angular velocity of the knee of the swing leg.Every two consecutive iterations are only slightly different from each other.Throughout the entire shaping process,changes accumulate,and new solutions emerge.Manifold control may also be used when the initial con-troller is profoundly suboptimal 4.It is also important to note that the rough terrain was traversed without informing the walker of the current terrain.We may say that the walkers walked blindly on their rough path.This demonstrates how stable a composite manifold controller can be.However,in some practical applications it could be beneficial to represent this important piece of information explicitly,and select the most appropriate ring at every step.We believe that the combination of local learning and careful shaping holds a great promise to many applications of periodic tasks,and hope to demonstrate it through future work on even higher-dimensional systems.Future research directions could include methods that allow second-order convergence,and learning a model of the plant.R EFERENCES[1]M.Stilman,C.G.Atkeson,J.J.Kuffner,and G.Zeglin,“Dynamicprogramming in reduced dimensional spaces:Dynamic planning for robust biped locomotion,”in Proceedings of the 2005IEEE Interna-tional Conference on Robotics and Automation (ICRA 2005),2005,pp.2399–2404.[2]J.Buchli, F.Iida,and A.Ijspeert,“Finding resonance:Adaptivefrequency oscillators for dynamic legged locomotion,”in Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).IEEE,2006,pp.3903–3909.[3] C.Chevallereau and P.Sardain,“Design and actuation optimization ofa 4-axes biped robot for walking and running,”in Proceedings of the IEEE International Conference on Robotics and Automation (ICRA),2000.[4] F.Plestan,J.W.Grizzle,E.Westervelt,and G.Abba,“Stable walkingof a 7-dof biped robot,”IEEE Trans.Robot.Automat.,vol.19,no.4,pp.653–668,Aug.2003.4theinterested reader is welcome to see other results of manifold learning on a 14-dimensional system at /2h3qny and /2462j7.[5] C.Sabourin,O.Bruneau,and G.Buche,“Experimental validation ofa robust control strategy for the robot rabbit,”in Proceedings of the IEEE International Conference on Robotics and Automation (ICRA),2005.[6] C.Chevallereau and Y .Aoustin,“Optimal reference trajectories forwalking and running of a biped robot,”Robotica ,vol.19,no.5,pp.557–569,2001.[7]M.Stilman,C.G.Atkeson,J.J.Kuffner,and G.Zeglin,“Dynamicprogramming in reduced dimensional spaces:Dynamic planning for robust biped locomotion,”in Proceedings of the 2005IEEE Interna-tional Conference on Robotics and Automation (ICRA 2005),2005,pp.2399–2404.[8]S.H.Collins,A.Ruina,R.Tedrake,,and M.Wisse,“Efficient bipedalrobots based on passive-dynamic walkers,”Science ,pp.307:1082–1085,February 2005.[9]R.L.Tedrake,“Applied optimal control for dynamically stable leggedlocomotion,”Ph.D.dissertation,Massachusetts Institute of Technol-ogy,August 2004.[10] A.Goswami, B.Espiau,and A.Keramane,“Limit cycles in apassive compass gait biped and passivity-mimicking control laws,”Autonomous Robots ,vol.4,no.3,pp.273–286,1997.[11]M.W.Spong and G.Bhatia,“Further results on the control of the com-pass gait biped,”in Proceedings of the 2003IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003),vol.2,2003,pp.1933–1938.[12]S.Ramamoorthy and B.Kuipers,“Qualitative hybrid control ofdynamic bipedal walking,”in Robotics :Science and Systems II ,G.S.Sukhatme,S.Schaal,W.Burgard,and D.Fox,Eds.MIT Press,2007.[13]S.Schaal and C.Atkeson,“constructive incremental learning fromonly local information,”neural computation ,no.8,pp.2047–2084,1998.[14]R.Munos,“Policy gradient in continuous time,”Journal of MachineLearning Research ,vol.7,pp.771–791,2006.[15] A.Goswami,B.Thuilot,and B.Espiau,“Compass-like biped robotpart i:Stability and bifurcation of passive gaits,”INRIA,Tech.Rep.2996,October 1996.[16] E.Westervelt, B.Morris,and J.Grizzle.(2003)Five link walker.IEEE-CDC Workshop:Feedback Control of Biped Walking Robots.[Online].Available:/2znlz2。
sophisticated_tracking_system_概述及解释说明

sophisticated tracking system 概述及解释说明1. 引言1.1 概述:跟踪系统是一种具有广泛应用的技术,通过利用各种先进的定位技术和设备来实现对目标的准确追踪和监控。
这些系统可以被广泛应用于物流与供应链管理、交通运输领域以及综合安防系统等多个领域中。
在过去的几十年中,随着科技的不断进步和创新,跟踪系统得到了快速发展,并取得了显著的成果。
各种先进的定位技术如GPS定位技术、RFID技术以及基站定位技术等逐渐成熟并被广泛应用于跟踪系统中,大大提高了跟踪系统的精度和可靠性。
本文将对跟踪系统进行全面概述与解释说明,包括其基本原理、先进的跟踪技术以及在物流与供应链管理、交通运输领域和综合安防系统中的应用领域与案例分析。
此外,我们还将总结主要观点和发现,并对未来发展趋势进行展望或提出建议。
1.2 文章结构:本文将按照以下方式组织和介绍深度追踪系统的内容:引言部分将向读者介绍文章的背景和目的,概述深度追踪系统的重要性和广泛应用领域。
紧接着,为了更好地理解深度追踪系统,我们将在第二部分阐述基本原理。
我们会对深度追踪系统进行定义和背景介绍,并详细阐述其组成部分和工作原理。
在第三部分中,我们将探讨一些先进的跟踪技术,包括GPS定位技术、RFID技术以及基站定位技术等,并解释它们在深度追踪系统中的应用和优势。
随后,在第四部分中,我们将涵盖深度追踪系统在物流与供应链管理、交通运输领域和综合安防系统中的具体应用领域与案例分析。
通过这些实际案例,读者能够更好地了解跟踪系统在不同领域中的作用和价值。
最后,在结论部分,我们将总结本文主要观点和发现,并对未来发展趋势进行展望或提出建议。
1.3 目的:本文旨在全面介绍深度追踪系统的概念、原理和应用,并通过案例分析展示其在物流与供应链管理、交通运输领域和综合安防系统中的重要性和优势。
同时,我们也希望为读者提供对未来发展趋势的深入思考,并针对不同领域中的实际需求提出相关建议。
基于数据驱动控制的鱼雷侧向运动控制研究

第43卷第2期2021年4月指挥控制与仿真CommandControl&SimulationVol 43㊀No 2Apr 2021文章编号:1673⁃3819(2021)02⁃0061⁃04基于数据驱动控制的鱼雷侧向运动控制研究李㊀恒,曹㊀渊,陈㊀轶,赵㊀江(海军研究院,北京㊀102442)摘㊀要:鱼雷作为水下作战的重要武器,其控制技术一直是国内外水下武器领域研究的热点问题㊂采用了基于数据驱动控制的控制方法,研究了鱼雷的侧向运动控制㊂当雷体的流体动力学参数未知时,仅利用雷体的输入输出数据,设计直舵角的控制律㊂这种方法在工程上计算量少,易于实现,因此实用性较强㊂在设计基于数据驱动控制的鱼雷垂直舵角控制律的过程中,通过雷体的输入输出数据,估计鱼雷的未知动态模型以及离散后的误差模型,设计参数更新律来估计未知参数㊂再结合滑模控制技术,得到了最终的控制算法㊂通过李雅普诺夫方法,证明了所设计控制律的稳定性㊂最后的仿真实验也说明了所提算法的有效性㊂关键词:数据驱动控制;滑模控制;鱼雷;侧向运动中图分类号:E925 23㊀㊀㊀㊀文献标志码:A㊀㊀㊀㊀DOI:10.3969/j.issn.1673⁃3819.2021.02.011LateralMotionDynamicsControlofTorpedoBasedonData⁃drivenControlLIHeng,CAOYuan,CHENYi,ZHAOJiang(NavalResearchAcademy,Beijing102442,China)Abstract:Asakeyweaponofunderwatermilitarybattle,thecontroltechnologyoftorpedohasbeenthehotissueallovertheworld.Adata⁃drivencontrolbasedmethodisproposedfortheresearchoflateraldynamicscontroloftorpedo.Whenthehydrodynamicparametersoftorpedoareunknown,theinput⁃outputdataisusedtodesignthecontrolschemeoftheverticalrudderangel.Becausethedata⁃drivenbasedcontrolmethodneedslittlecalculation,itismorepracticaltorealizeintherealsystems.Inthedesigningprocessofdata⁃drivenbasedcontrolalgorithmofverticalrudderangel,theunknowndynamicsandtheerrorofthediscretizationareestimatedbyspecialparameter⁃identifiedupdatedlawthroughtheinput⁃outputdatainthispaper.Combinedwiththeslidingmodecontroltechnology,thedata⁃drivenbasedalgorithmoftheverticalrudderangelcomesout.ItisprovedtobestableusingLyapunovstabilitymethod.Thesimulationresultsalsoindicatetheeffectivenessofthepro⁃posedalgorithm.Keywords:data⁃drivencontrol;slidingmodecontrol;torpedo;lateralmotiondynamics收稿日期:2020⁃12⁃21修回日期:2020⁃12⁃29作者简介:李㊀恒(1982 ),男,湖北武汉人,博士,高级工程师,研究方向为鱼雷武器系统㊂曹㊀渊(1985 ),男,博士,工程师㊂㊀㊀鱼雷作为水下作战最有效的武器,其控制技术一直是国内外水下武器领域研究的热点问题㊂随着现代科技迅速发展,鱼雷正朝着航行深度深,航行范围大,航行路程远,航行速度高,雷体特征参数变化范围大等方向发展㊂因此,传统的PID控制技术已经不能满足鱼雷的控制需求,自适应控制㊁滑模控制㊁反步控制㊁最优控制等现代控制理论技术正逐步运用于鱼雷的控制上面㊂文献[1]采用了滑模变结构控制方法,设计了鱼雷侧向运动的控制律㊂文献[2]采用滑模模糊控制方法,解决了无法有效抑制鱼雷横滚的问题㊂文献[3]设计了基于变结构控制的反鱼雷(ATT)导引律,导引律中取变结构控制器使得ATT与来袭鱼雷间视线角保持恒定,且控制器对模型参数摄动具有强鲁棒性㊂文献[4]采用高阶滑模控制器,解决了鱼雷控制过程中抖颤的问题㊂数据驱动控制是指受控系统控制器的设计不包含受控过程数学模型信息,仅利用受控系统的在线和离线输入输出数据以及经过处理而得到的信息来设计系统控制算法,并且在一定的假设下,控制器使系统具有收敛性㊁稳定性以及鲁棒性[5]㊂从数据驱动控制的定义可以看出,发展数据驱动控制理论与方法是新时期控制理论发展与重大应用的必然要求,具有重要的理论与现实意义,因此数据驱动控制理论的研究受到了越来越多中外学者的关注㊂文献[6]研究了在有预设暂态约束条件下的数据驱动控制方法㊂文献[7]研究了基于无模型自适应控制方法的水面无人船侧滑角控制㊂文献[8]研究了基于无模型自适应迭代控制的多异构非线性智能体的编队控制问题㊂文献[9]设计了一种基于实时数据驱动的无模型自适应控制方法,实现了船舶的稳定操控㊂鱼雷的动力学模型具有非线性㊁强耦合㊁流体动力参数众多等特点,因此通常把鱼雷的空间运动分解为纵向运动和侧向运动㊂这样的分解,是一种简化方法,把一个复杂系统分解为较简单的几个子系统,暂时略去子系统之间的交连耦合作用,以便于问题的研62㊀李㊀恒,等:基于数据驱动控制的鱼雷侧向运动控制研究第43卷究[10]㊂鱼雷的侧向运动是指鱼雷在水平面(地面坐标系平面)内的运动㊂鱼雷的侧向运动包括鱼雷在水平面内的运动和绕轴的转动㊂本文针对鱼雷流体动力参数未知的情况,采用基于数据驱动控制的滑模变结构方法,设计了基于数据驱动控制的垂直舵角算法,控制鱼雷的侧向运动,并通过李雅普诺夫稳定性方法以及数学仿真来说明所提算法的有效性㊂1㊀鱼雷模型1 1㊀鱼雷侧向运动方程组本文仅考虑无横滚运动下的鱼雷侧向运动,鱼雷的侧向运动方程组如下mv0̇Ψ=-12ρv20SLmβzβ+mδzδr+m ωz ωy()+λ33̇β+λ35ω㊃-y+Tβ(Jyy+λ55)̇ωy=12ρv20SLmβyβ+mδyδr+m ωy ωy()-λ35̇β̇ψ=ωẏz0=-v0sinΨΨ=ψ-βìîíïïïïïïïïïïïïïï(1)其中,Ψ为弹道偏角,ωy为偏航角速度,zo为侧向位移,ψ为偏航角,δr为鱼雷直舵角㊂1 2㊀鱼雷侧向运动模型离散化由式(1)可得如下方程组̇ψ=ωẏωy=fβ,̇β, ωy()+gδr{(2)其中,fβ,̇β, ωy()=12ρv20SLmβyβ+m ωy ωy()-λ35̇βéëêêùûúúJyy+λ55,g=12ρv20SLmδy/(Jyy+λ55)将式(2)离散化,可得如下方程组:ψ(k+1)=ψ(k)+Tsωy(k)ωy(k+1)=ωy(k)+ξ(k)δr(k){(3)其中,ξ(k)=Ts[f(k)δr(k)+g+Ω(k)]表示系统的未知动态,Ω(k)是侧向运动方程离散化后系统未知的未建模部分,Ts为采样时间㊂2㊀控制律设计2 1㊀数据驱动控制对于如下的离散非线性系统:y(k+1)=f(y(k), ,y(k-ny),u(k), ,u(k-nu))(4)其中,u(k)㊁y(k)分别为系统在第k时刻的输入与输出,ny㊁nu分别为两个未知的正整数,f( )表示系统未知的模型㊂基于上述离散系统,有以下假设[11]:假设1)离散系统的输入㊁输出均可控可观测㊂假设2)未知函数f( )对于系统任意时刻输入或者输出的偏导数存在㊂假设3)非线性系统(4)满足Lipschitz条件,即f(y(k),u(k))-fyk-1(),uk-1()()ɤbu(k)-uk-1()其中,b是一个正常数㊂满足上述假设的系统,其模型可以表示成如下紧格式动态线性化模型:y(k+1)=y(k)+ϕΔu(k)(5)其中,ϕ为系统的伪偏导数㊂系统(5)很容易设计控制输入对系统进行控制,它将一个非线性系统等价转化为带有一个时变标量参数的线性时变系统㊂利用最小化加权一步向前预报误差准则函数,可得如下控制输入设计方案:u(k)=uk-1()+ρkϕ(k)λ+^ϕ(k)2yd(k+1)-y(k)()ϕ(k)=ϕk-1()+ηkΔuk-1()λ+Δuk-1()2∗y(k)-^ϕ(k-1)Δuk-1()()(6)从上述控制算法和参数更新律可以看出,式(5)㊁式(6)的设计与系统的数学模型以及模型参数无关,仅利用测量到的输入输出数据进行控制输入的设计,该控制算法可以实现受控系统的参数自适应控制㊂由离散后的鱼雷侧向运动方程组可知,式(3)满足假设1)㊁2)㊁3)的所有条件,因此可以采用数据驱动控制方法来控制鱼雷的侧向运动㊂2 2㊀鱼雷垂直舵角的控制律设计对于式(3),令^ξ表示为系统未知动态ξ的估计值,则关于^ξ的预设误差准则函数可以设计成如下形式:J(^ξ)=ωy(k+1)-ωy(k)-^ξ(k)δr(k)2+μ^ξ(k+1)-^ξ(k)2(7)令∂J(^ξ(k))∂^ξ(k)=0,可以得到:^ξ(k+1)=^ξ(k)+pδr(k)μ+δ2r(k)(Δωy(k+1)-^ξ(k)δr(k)^ξ(k+1)=^ξ(1),当^ξ(k+1)<ε或sgn(^ξ(k))ʂsgn(^ξ(1))(8)第2期指挥控制与仿真63㊀式中,pɪ(0,1)是一个常数,ε是一个任意小的常数,sgn(㊀)表示符号函数㊂考虑滑模面s(k+1)=e(k+1)+Ce(k)其中,e(k+1)=ωy(k+1)-ωd(k),系数Cɪ(0,1)是正常数,ωd(k)表示期望的角速度㊂令滑模面s(k+1)=0,结合式(7)㊁(8)得到直舵角控制律为δr(k)=ω(d(k)-ωy(k)-Ce(k)-ρsgn(s))/(^ξ(k)+σ)(9)其中,σ为正常数,算法流程如表1所示㊂表1㊀垂直舵角算法设计流程示意算法㊀基于数据驱动控制的鱼雷垂直舵角控制律设计输入:ψd(k)㊁ωd(k)㊁ψ(k)㊁ωy(k)㊁δr(k)㊁^ξ(k)输出:ωy(k+1)㊁ψ(k+1)㊁^ξ(k+1)1.㊀初始化参数2.㊀fork=0,k<K,k++3.㊀e(k+1)ѳωy(k+1)-ωd(k)4.㊀s(k+1)ѳe(k+1)+Ce(k)5.㊀^ξ(k+1)ѳ^ξ(k)+pδr(k)μ+δ2r(k)Δωy(k+1)-^ξ(k)δr(k)()6.㊀δr(k+1)ѳ(ωd(k)-ωy(k)-Ce(k)-ρsgn(s))/(^ξ(k)+σ)7.㊀endforstopcommand㊀2 3㊀稳定性证明式(3)可改写为ωy(k+1)=ωy(k)+^ξ(k)+σ()δr(k)+υ(k)式中,υ(k)=ξ(k)-^ξ(k)-σ()δr(k)㊂考虑如下李雅普诺夫方程V(k)=|s(k)|(10)考虑式(8)与(10),则可以得到V(k+1)-V(k)=ΔV(k)由上分析,可以推断出υ(k)是有界的,那么存在一个正常数b,使得maxiɪ{2, ,k}υ(i)-υ(i-1)<b成立,那么当ΔV(k)<0时,s(k)>b+ρ㊂最终,s(k)会收敛到以0为邻域的区域内,因此可以说明e(k)的有界性㊂3㊀仿真实验分析考虑如下的鱼雷侧向运动方程组:̇ψ=ωẏωy=0 08v20(0 8β-0 2δr-0 6ωy)仿真时间设为20s,仿真步长Ts=0 01s,雷体速度取v0=13m/s,ψ㊁ωy初始值为0,ωd=0,ψd=10/57 3,^ξ(0)=0,仿真结果如图1㊁2所示㊂图1㊀鱼雷偏航角变化曲线图2㊀鱼雷偏航角速率变化曲线上述仿真中,取参数p=0 5,ρ=5 4,C=0 8,σ=0 01㊂从上述仿真结果可以看出,利用本文所提控制律对鱼雷的偏航角进行控制,可以使偏航角快速趋近于期望角度,没有超调产生,并且偏航角速率也控制在期望范围内,因此控制算法达到了期望的效果㊂4㊀结束语本文采用了基于数据驱动控制的控制方法,研究了鱼雷的侧向运动控制㊂得到雷体的侧向运动方程组以及其离散化形式之后,由于参数未知时,仅利用雷体的输入输出数据,设计直舵角的控制律㊂通过雷体的输入输出信息,估计鱼雷的未知动态模型以及离散后的模型误差㊂再结合滑模控制技术,设计了雷体直舵角的控制律㊂通过李雅普诺夫方法,证明了所设计控制律的稳定性㊂最后的仿真实验也说明了所提算法的有效性㊂参考文献:[1]㊀胡蔷,高立娥,刘卫东.鱼雷侧向运动的滑模变结构64㊀李㊀恒,等:基于数据驱动控制的鱼雷侧向运动控制研究第43卷控制仿真研究[C]ʊ中国西部声学学术交流会论文集,2015.[2]㊀王珲,潘雷.基于滑模模糊控制的鱼雷横滚控制方法研究[J].舰船电子工程,2013,33(5):150⁃152.[3]㊀李宗吉,张西勇,练永庆.基于变结构控制的反鱼雷鱼雷导引律鲁棒性研究[J].鱼雷技术,2014,22(4):272⁃276.[4]㊀RhifA.AHighOrderSlidingModeControlwithPIDSlid⁃ingSurface:SimulationonaTorpedo[J].InternationalJournalofInformationTechnology,ControlandAutomation,2012,2(1):1⁃13.[5]㊀侯忠生,许建新.数据驱动控制理论及方法的回顾和展望[J].自动化学报,2009,35(6):650⁃667.[6]㊀ZhangW,XuD,JiangB,etal.PrescribedPerformancebasedModel⁃FreeAdaptiveSlidingModeConstrainedControlforaClassofNonlinearSystems[J].InformationSciences,2020(544):97⁃116.[7]㊀WengY,WangN,SoaresCG.Data⁃DrivenSideslipOb⁃serverbasedAdaptiveSliding⁃ModePath⁃FollowingControlofUnderactuatedMarineVessels[J].OceanEngi⁃neering,2020(197):106910.[8]㊀RenY,HouZ.RobustModel⁃freeAdaptiveIterativeLearningFormationforUnknownHeterogeneousNonlinearMulti⁃AgentSystems[J].IETControlTheory&Applica⁃tions,2019,14(4):654⁃663.[9]㊀熊勇,余嘉俊,牟军敏,等.基于数据驱动控制的船舶自动靠泊[J].中国航海,2020,43(3):1⁃7.[10]严卫生.鱼雷航行力学[M].西安:西北工业大学出版社,2005:248⁃252.[11]HouZ,ChiR,GaoH.AnOverviewofDynamicLinear⁃ization⁃BasedData⁃DrivenControlandApplications[J].IEEETransactionsonIndustrialElectronics,2016,64(5):4076⁃4090.(责任编辑:许韦韦)。
水面无人船控制系统设计与研究

欠驱动自主水下航行器空间曲线路径跟踪控制研究
欠驱动自主水下航行器空间曲线路径跟踪控制研究苗建明;王少萍;范磊;李元【摘要】针对具有模型不确定性和输入饱和的欠驱动自主水下航行器(AUV),提出一种基于改进反步法的简单实用三维空间曲线路径跟踪鲁棒控制器.在Serret-Frenet坐标系下建立了空间曲线路径跟踪误差模型,结合视线角制导和虚拟向导法,设计了基于李雅普诺夫理论和改进反步法的运动学和动力学控制器.不同于传统的积分器反步法,该方法在控制器设计中采用跟踪误差的积分来增加控制器的鲁棒性,不会增加系统的状态变量和计算量;针对设计的运动学控制器存在非因果现象的问题,借助动力学模型求解出运动学控制器表达式;针对传统反步法存在的“微分爆炸”现象及动力学控制器过于复杂的问题,采用非线性跟踪微分器对控制器进行简化.仿真结果表明:采用所设计的基于改进反步法的控制器能够实现欠驱动AUV在模型参数不确定性和输入饱和作用下的三维空间曲线路径跟踪控制,控制精度和鲁棒性明显优于常规反步法.%Based on the modified back-stepping technique,a simple and robust spatial curvilinear path following controller for the underactuated autonomous underwater vehicles (AUVs) with model uncertainties and input saturation is presented.A path following error dynamics model is constructed in a moving Serret-Frenet frame,and the kinematic controller and dynamic controller are developed based on line-ofsight (LOS) guidance algorithm and virtual moving targetmethod.Differing from the traditional integrator backstepping technique,the proposed method is to introduce the integral tracking errors into the controller design to improve the robustness against the uncertainties.The dynamic model is used to solve the non-causal formcaused by the coupled underactuated degrees.The nonlinear tracking differentiators (NTDs) are employed to construct the numerical solution of differential virtual control commands to tackle the problem of "explosion of terms" in the traditional back-stepping process,and the dynamic controller expressions are simplified.Simulations demonstrate that the designed controller realizes the spatial curvilinear path following control of underactuated AUV with model parameter uncertainties and input saturation,and its accuracy and robustness are more excellent than those of the traditional back-stepping control.【期刊名称】《兵工学报》【年(卷),期】2017(038)009【总页数】11页(P1786-1796)【关键词】控制科学与技术;欠驱动AUV;空间曲线路径跟踪;反步;李雅普诺夫理论【作者】苗建明;王少萍;范磊;李元【作者单位】北京航空航天大学自动化科学与电气工程学院,北京100083;中国船舶重工集团公司第710研究所,湖北宜昌443003;北京航空航天大学自动化科学与电气工程学院,北京100083;北京航空航天大学自动化科学与电气工程学院,北京100083;61267部队第41分队,北京101114;北京航空航天大学自动化科学与电气工程学院,北京100083【正文语种】中文【中图分类】TP242.3Abstract: Based on the modified back-stepping technique, a simple and robust spatial curvilinear path following controller for the underactuated autonomous underwater vehicles (AUVs) with model uncertainties and input saturation is presented. A path following error dynamics model is constructed in a moving Serret-Frenet frame, and the kinematic controller and dynamic controller are developed based on line-of-sight (LOS) guidance algorithm and virtual moving target method. Differing from the traditional integrator backstepping technique, the proposed method is to introduce the integral tracking errors into the controller design to improve the robustness against the uncertainties. The dynamic model is used to solve the non-causal form caused by the coupled underactuated degrees. The nonlinear tracking differentiators (NTDs) are employed to construct the numerical solution of differential virtual control commands to tackle the problem of “explosion of terms” in the traditional back-stepping process, and the dynamic controller expressions are simplified. Simulations demonstrate that the designed controller realizes the spatial curvilinear path following control of underactuated AUV with model parameter uncertainties and input saturation, and its accuracy and robustness are more excellent than those of the traditional back-stepping control.Key words: control science and technology; underactuated AUV; spatial curvilinear path following; back-stepping; Lyapunov’s theory随着自主式水下航行器(AUV)在海洋研究和开发领域的应用越来越广泛,路径跟踪控制已经成为AUV运动控制的重要技术之一[1-3]。
Adaptive tracking control of uncertain MIMO nonlinear systems with input constraints

article
info
abstract
In this paper, adaptive tracking control is proposed for a class of uncertain multi-input and multi-output nonlinear systems with non-symmetric input constraints. The auxiliary design system is introduced to analyze the effect of input constraints, and its states are used to adaptive tracking control design. The spectral radius of the control coefficient matrix is used to relax the nonsingular assumption of the control coefficient matrix. Subsequently, the constrained adaptive control is presented, where command filters are adopted to implement the emulate of actuator physical constraints on the control law and virtual control laws and avoid the tedious analytic computations of time derivatives of virtual control laws in the backstepping procedure. Under the proposed control techniques, the closed-loop semi-global uniformly ultimate bounded stability is achieved via Lyapunov synthesis. Finally, simulation studies are presented to illustrate the effectiveness of the proposed adaptive tracking control. © 2011 Elsevier Ltd. All rights reserved.
A New Nonlinear Guidance Logic

A New Nonlinear Guidance Logic forTrajectory TrackingSanghyuk Park∗,John Deyst†,and Jonathan P.How‡Massachusetts Institute of Technology,Cambridge,MA,02139,USAA new nonlinear guidance logic,that has demonstrated superior performance in guidingunmanned air vehicles(UA Vs)on curved trajectories,is presented.The logic approx-imates a proportional-derivative controller when following a straight line path,but the logic also contains an element of anticipatory control enabling tight tracking when follow-ing curved paths.The method uses inertial speed in the computation of commanded lateral acceleration and adds adaptive capability to the change of vehicle speed due to external disturbances,such as wind.Flight tests using two small UA Vs showed that each aircraft was controlled to within1.6meters RMS when following circular paths.The logic was ultimately used for air rendezvous of the two aircraft,bringing them in close proximity to within12meters of separation,with1.4meters RMS relative position errors.NomenclatureV Vehicle velocityL1A line defined from vehicle position to a reference point on a desired trajectoryηAngle created from V to the line L1(clockwise direction is positive)a scmd Acceleration command sideways i.e.perpendicular to vehicle velocity directiond Cross-track errorR Radius of circle or circular segmentL Lyapunov functionI.IntroductionTwo approaches can be considered for the problem of trajectory tracking.One method separates the vehicle guidance and control problems into an outer guidance loop and an inner control loop.The inner loop controls the vehicle to follow acceleration commands which are generated by the outer loop.Simple strategies, based on geometric and kinematic properties,are typically used in the outer guidance loop.The alternative method uses an integrated approach wherein the inner and outer loops are designed simultaneously.In this case,a number of modern control design techniques can be applied,such as receding horizon[1],differential flatness[2,3]and neural network based adaptive controls[4].In most actualflight applications the separate inner and outer loop approach is more commonly taken because it is usually simpler and well-established design methods are available for inner loop vehicle control. Linear controllers are commonly used for the outer loop guidance of an aircraft.Typically,proportional and derivative(PD)controllers are used on the cross-track error,which is the lateral deviation from a desired flight path.If the desired trajectory path is similar to a straight line,then this simple strategy will provide reasonably good outer loop performance.However,when tasks require tight tracking of complex curved paths,linear feedback on the cross-track error may not provide satisfactory performance.The guidance logic presented in this paper contains an anticipatory control element which overcomes the inherent limitation of feedback control in following curved paths.∗Post-doctoral Associate,Laboratory for Information and Decision Systems,MIT,sanghyuk@†Professor of Aeronautics and Astronautics,MIT,deyst@‡Associate Professor of Aeronautics and Astronautics,MIT,jhow@.Senior Member AIAA.1of16There are several terminal phase guidance laws for short-range tactical missiles that can be used to do trajectory following by using an imaginary point moving along the desiredflight path as a pseudo target.Of these,proportional navigation generally provides the best performance,with less control effort,in constant-velocity intercepts,and it is widely accepted as the preferred method of guidance[5–7].The trajectory following guidance logic presented in this paper was motivated by this proportional navigation method.An important element in the proportional navigation is the use of the change in the line-of-sight between a missile and a target.A similar feature is also found in the trajectory following guidance logic between a vehicle and a pseudo target on a desired path.An important difference between the two methods is that, unlike the proportional navigation,the speed of the pseudo target is not taken into account in the trajectory tracking guidance logic.A detailed discussion on the relationship of the trajectory following guidance logic to proportional navigation is provided in Section II-B.Section II introduces the guidance logic and describes related properties.While the guidance logic developed here is simple and easy to apply,it is shown to have a number of benefits over linear approaches for curved paths.First,it contains proportional and derivative controls on cross-track error.Second,it has an element of anticipation for the upcoming local desiredflight path.This property enables tight tracking on curvedflight trajectories.Third,it uses instantaneous vehicle speed in the algorithm.This kinematic factor adds an adaptive feature with respect to changes in vehicle inertial speed caused by external disturbances such as wind.The algorithm is easily implemented,andflight test results showing excellent tracking performance are given in Section III.The proposed guidance logic was implemented in two unmanned air vehicles(UAVs)in the Parent Child Unmanned Air Vehicle(PCUAV)Project[8,9]at MIT,under the sponsorship of Draper Laboratory.II.The New Guidance LogicThe guidance logic presented in this paper selects a reference point on the desired trajectory,and gener-ates a lateral acceleration command using the reference point.Selection of Reference Point–The reference point is on the desired path at a distance(L1)forward of the vehicle,as shown in Figure1.Lateral Acceleration Command–The lateral acceleration command is determined bya scmd =2V2L1sinη(1)Figure1.Diagram for Guidance Logic Two properties of the guidance equation are significant.2of16sV∆t ∆s=V ∆t:Figure 2.Discrete Representation :One Time 1.The direction of the acceleration depends on the sign of the angle between the L 1line segment and the vehicle velocity vector.For example,if the selected reference point is to the right of the vehicle velocity vector,then the vehicle will be commanded to accelerate to the right,which is the case in Figure 1.In other words,the vehicle will tend to align its velocity direction with the direction of the L 1line segment.2.At each point in time a circular path can be defined by the position of the reference point,the vehicle position,and tangential to the vehicle velocity vector;as indicated by the dotted line in Figure 1.The acceleration command generated by Eq.(1)is equal to the centripetal acceleration required to follow this instantaneous circular segment.This is readily shown by noting thatL 1=2R sin η(2)socentripetal acceleration =V 2R =2V 2L 1sin η=a s cmd Hence the guidance logic will produce a lateral acceleration that is appropriate to follow a circle of anyradius R .A.Characteristics of the Guidance LogicThis section describes a discrete time simulation that was performed to gain further insights about the performance of the nonlinear guidance law.First,consider Figure 2showing the evolution of the guidance logic in one small time step increment.In this diagram,the reference point is to the right of the direction of the vehicle velocity.Therefore,at the next time step the velocity direction rotates clockwise due to the acceleration command.With this one time step increment in mind,Figure 3shows the trajectory of the vehicle over several time steps,where the vehicle initially starts from a location far away from the desired path,and eventually converges to the desired path.Given a certain length L 1as shown in Figure 3,it can be inferred that •The direction of L 1makes a large angle with the desired path,when the vehicle is far away from the desired path.•The direction of L 1makes a small angle with the desired path,when the vehicle is close to the desired path.Therefore,if the vehicle is far away from the desired path,then the guidance logic tends to rotate the vehicle so that its velocity direction approaches the desired path at a large angle.On the other hand,if the vehicle is close to the desired path,then the guidance logic rotates the vehicle so its velocity direction approaches the desired path at a small angle.3of 16B.Relation to Proportional Navigation Guidance LawsConsider the reference point as a target and the aircraft as a missile.Then,an interesting similarity is found in relation to proportional navigation missile guidance.The formula in Eq.(1)for the lateral acceleration command in the trajectory following guidance logic can be shown to be equivalent to the formulaa ⊥LOS =N V C ˙λfor the acceleration command perpendicular to the line-of-sight in the proportional navigation with a nav-igation constant of N =2,under the assumption that the reference point is stationary in the computa-tion of the line-of-sight rate and the closing velocity.This equivalence can be shown using Figure 4.a Figure 4.Relation with Proportional NavigationFirst,noticing that there is an angular difference between the vehicle lateral acceleration(a s )and the acceleration(a ⊥LOS )perpendicular to the LOSa ⊥LOS =a s cos ηUsing the acceleration command formulaa s =2V 2L 1sin ηleads to a ⊥LOS =2V2L 1sin η·cos η=2(V cos η)VL 1sin ηwhere,assuming that the target point is stationary,the first bracket is the closing velocity (the relative velocity component in the direction of the LOS)and the second bracket is the LOS rate.Therefore,it can be shown thata ⊥LOS =2·V C ·˙λwhich is the form of the proportional navigation formula with the navigation constant equal to 2.However,the guidance logic (selection of reference point +acceleration command)cannot be explained only by the proportional navigation because the reference point is actually moving,and the closing speed between the reference point and the vehicle is always zero (with L 1fixed).C.Linear AnalysisIn this section,linear analyses are performed for the following three cases:•Case 1:following a straight line•Case 2:following a non-straight line which is a perturbation from a straight line •Case 3:following a circular pathand significant features are pointed out.An important design choice in the guidance logic is the distance L 1between the vehicle and the reference point.This value can be chosen with the help of a linear system analysis.Case 1:Following a Straight-line and Selection of L 1Figure 5defines the notation used in the linearization.L 1is the distance from the vehicle to the reference point,d is the cross-track error,and V is a vehicle nominal speed.Assuming ηis small in magnitudesin η≈η=η1+η2andη1≈d L 1,η2≈˙d V4of 16Figure5.Linear Model for Straight-line Following Case Combining the above with the guidance formula leads toa scmd =2V2L1sinη≈2VL1˙d+VL1d(3)Hence,linearization of the nonlinear guidance logic yields a PD(proportional and derivative)controller for the cross-track error.Also,the ratio of the vehicle speed V and the separation distance L1is an important factor in determining the gains of the proportional and derivative controllers.For instance,a small value for L1would lead to a high control gain and the ratio L1/V determines the time constant of the PD controller.The separation distance can be chosen by performing a stability analysis with the linear plant model and the derived linear controller.The plant model should include the vehicle dynamics with inner-loop bank angle controller(if bank angle is used to generate lateral acceleration for aircraft)and any sensor dynamics in the associated loop transmission function.Furthermore,assuming no inner-loop dynamics and a small angle assumption onη2,then a scmd ≈−¨dand Eq.(3)is equal to¨d+2ζωn ˙d+ω2nd=0withζ=1/√2,ωn=√2V/L1(4)Eq.(4)indicates that an approximate linear model,for the case of following a straight line,is a simple second order system that always has a damping ratio of0.707and its natural frequency is determined by the ratio of the vehicle speed and the length for the reference point selection.Case2:Following a Perturbed Non-Straight LineThe tracking capability on a curved path is demonstrated in this section by performing a linear analysis for a case with non-straight desired trajectory as shown in Figure6.In this case the desired path is a perturbedFigure6.Linear Model for Non-straight Perturbed Line Following Casecurved line from a nominal straight line.In Figure6,d is the lateral position of the current vehicle locationand dref.pt.indicates the position of the reference point.Assuming the magnitude of the angles,η1andη2are smallsinη≈η=η1+η25of16Then,sinceη1≈d −d ref.pt.L 1,η2≈˙d Vand a s cmd ≈−¨d,the guidance law in Eq.(1)reduces to ¨d +2V L 1˙d +2V 2L 21d =2V 2L 21dref.pt.(5)Taking the Laplace transforms of each term of Eq.(5)yieldsd (s )d ref.pt.(s )=ω2ns +2ζωn s +ωn where ζ=0.707,ωn =√2VL 1(6)Eq.(6)represents a second order low-pass linear system with a unity steady state gain from the reference point input to the vehicle position.The damping ratio(ζ)is 0.707and the undamped natural frequency(ωn )is determined by √2V/L 1.The input of the transfer function in Eq.(6)is the lateral position of the referencepoint,not the position of the desired path at current vehicle location (i.e.,d ref.pt.not d).The use of a reference point in front enables phase recovery around the bandwidth frequency ωn .For example,consider a sinusoidal trajectory command written asd =A sin 2πxL p (7)where A is a small path amplitude,L p is a length-scale of the sinusoid,and x is distance along the path.Assuming x ≈V t then if L p =√2πL 1≈4.4L 1,the commanded trajectory expressed by Eq.(7)will excite the system at the bandwidth frequency (recall ωn =√2V/L 1).For a well-damped second order system as in Eq.(6)the phase lag at this frequency is 90degrees.But this phase loss is from position input of thereference point d ref.pt.,not from d,in Figure 6.Recalling that the reference point is at L 1=L p /4.4(abouta quarter of period)distance away,there will be about 90degrees of phase lead in d ref.pt.over d.Therefore,these two effects will cancel each other,and the phase difference between the vehicle position and the desired path at current vehicle location (i.e.between d and d )will be significantly reduced.In general,considering the vehicle speed and the length for L 1,and assuming small angle for ηthere is a time difference of approximately L 1/V between d and d ref.pt.i.e.d ref.pt (s )d (s )≈e τs ,τ≈L 1/VTherefore,Eq.(6)can be written asd (s )d (s )=ω2n eτss 2+2ζωn s +ω2nwhere ζ=0.707,ωn =√2VL 1,τ≈L 1/V (8)Bode diagrams for this system,as a function of L 1/L p ,are shown in Figure 7.The plot clearly shows the improvement in phase response near the system bandwidth (when L 1/L p ≈1/4.4=0.23)that results from the anticipation (e τs ).Furthermore,if L p is the wavelength of the highest frequency content in the desired path,then L 1must be chosen to be less than about L p /4.4if the vehicle is to accurately follow the desired path.Case 3:Following a Circular PathFigure 8shows a diagram for a case of following a circular desired path.In this analysis η1and η2are assumed to be small,but η3is not necessarily small.η1≈0,η2≈0,|η3| 0(9)It should be noticed that the angle η3is associated with the local circular segment as shown in the diagram.The current position of the vehicle is specified by r =R +d and θ.ψindicates the velocity direction.η2is6of 16an angle that is created by the difference between the velocity direction and the current tangent line to the circular desired path.The relation among the three angles isψ−θ+η2=π2Then,˙ψ=˙θ−˙η2(10) Also,due to assumptions in Eq.(9)and using a similar relation in Eq.(2)sinη3≈L12R(11)We further definec≡cosη3≈1−L12R2(12)Using the small angle assumption forη2the rate of change in position error is expressed as˙d=V sinη2≈Vη2Therefore,¨d≈V˙η2(13) Also,using the relations in Eq.(10)and Eq.(13)the lateral acceleration is expressed asa scmd≈V˙ψ=V˙θ−V˙η2=V˙θ−¨dWith the small angle assumptions onη1andη2V˙θ≈V2 Rwhich is centripetal acceleration to follow the circle with radius R at speed V.Thena scmd ≈V2R−¨d(14)7of16reference pointFigure8.Circular Path Following CaseUsing small angle assumptions forη1andη2,2V2 L1sinη=2V2L1sin(η1+η2+η3)=2V2L1{sin(η1+η2)cosη3+cos(η1+η2)sinη3}≈2V2L1{η1cosη3+η2cosη3+sinη3}(15)Withη1≈dL1cosη3,η2≈˙dVand applying Eq.(11)and Eq.(12),Eq.(15)reduces to2V2 L1sinη=2V2c2L21d+2V cL1˙d+V2R(16)Finally,substituting the relations in Eq.(14)and Eq.(16)to Eq.(1)yields¨d+2ζωn ˙d+ω2nd≈0whereζ=0.707,ωn=√2V cL1(17)Therefore d→0as t→∞.parison of the New Guidance Logic with the Traditional Linear MethodIn the previous section,it was shown that the nonlinear guidance logic approximates a linear PD controller, on cross-track error,in following a straight line.This section will compare,by simulations,the performance of the nonlinear guidance logic and the associated linear controller,for various cases of trajectories and wind conditions.In the simulation analysis presented below,25m/s of nominal vehicle speed and the separation distance(L1) of150m were used for the associated linear controller given by Eq.(3).8of16parison-Straight Line FollowingComparison1-Straight Trajectory FollowingFirst,the two methods were applied for tracking a straight line.Figure9shows the simulation setup with an initial cross-track error of10meters and the associated results using the two methods.The simulation results indicate that the performances of the two methods are roughly the same in following a straight trajectory. Comparison2-Curved Trajectory FollowingNext,the two methods were applied to tracking a curved line.Figure10shows the simulation setup,the desired curvedflight trajectory,and the associated simulation results.The aircraft is initially at levelflight heading due north.The trajectory plot(a)in Figure10is the case where the linear controller was used.The PD controller resulted in a steady state error of about40meters.The steady state error can be explained by noting that the system is type2.There are two pure integrators in the associated loop transmission with a plant model and the PD controller.The two integrators are from the kinematics of the plant model-from acceleration input to position output.The steady state error occurs because the position reference command for cross-track is imposed in a parabolic fashion,when the desired path is a circle.In order to eliminate the steady state error,an integrator was added.The simulation result using the PID controller is now plotted on the same graph as a solid line.As can be seen the steady state error is removed by adding the integration controller.However,the error during the initial transition still remains.On the other hand,the nonlinear guidance logic worked very well in following the curved path as indicated in Figure10(b).Deviation from the curved path was no more than5meters during the initial transient. Comparison3-Curved Trajectory Following with WindAdditional simulations were executed with similar conditions and with afive meter per second steady wind. The direction of the wind was from west to east.The vehicle initial condition and the wind condition are shown in Figure11.The performance of the linear controllers(PD and PID)are shown in the trajectory plot(a)in Figure11.For the PD controller,the cross-track error varied in a range between30m and60m,after the initial transition period.For the PID controller,the cross-track error varied in the range between-20m and+20 m after the initial transition period.A more careful look reveals that the vehicleflies outside the circular path when it is in the downwind region,and inside the circular path in the upwind region.The reason for this performance can be explained by noting that when the vehicle is in the downwind region,it moves faster with respect to an inertial frame.Under this condition,the vehicle must generate a larger acceleration command(or a larger bank angle command)if it is to follow the desired circular path.The linear feedback controller withfixed gain has an inherent limitation and cannot immediately remove the error,which is the result of inertial speed changes due to the wind.9of16200100010*******East [m]reference with PD with PID300200100010*******300200100100200300East [m]N o r t h [m ](a)PD,PID Linear Control (b)Nonlinear GuidanceLogicFigure parison -Curved Line Following(a)PD,PID Linear Control(b)Nonlinear Guidance LogicFigure parison -Curved Line Following with Wind10of 16(a)Mini Child Vehicle(b)OHS Parent VehicleFigure12.Two UA Vs in Parent Chicle Unmanned Air Vehicle Project On the other hand,the nonlinear guidance logic method worked very well in following the curved path, in the presence of wind,as shown in Figure11(b)with errors less than7meters after the initial transient has decayed.The reason for the better performance in this case can be understood by the formula in Eq.(1)a scmd =2V2L1sinηwhere the vehicle ground speed(as a surrogate for inertial velocity)is used for V at each instant in generating the acceleration command.In other words,the nonlinear guidance logic takes into account the inertial velocity changes due to the wind effect,and adapts to the situation accordingly.III.Flight TestThe guidance algorithm was implemented and tested with the two UAVs constructed in the Parent Child Unmanned Air Vehicle(PCUAV)project at MIT.In creating the required lateral acceleration,bank angle control was used in the inner loop.The associated outer-loop control bandwidth was limited by the inner-loop bank control bandwidth(2∼3rad/s)and a GPS time delay of0.4seconds.Thus,with the nominal flight velocity of about25m/s,the choice of L1=150m results in the associated crossover frequency at0.4 rad/s.Figure12(a)shows the Mini Child vehicle.The vehicle has a wing span of2.54meters and its total weight,including onboard avionics,is9.1kilograms.Figure12(b)shows the Outboard Horizontal Stabilizer (OHS)configuration of the Parent vehicle.Aerodynamic and the associated stability features of this platform are found in Ref.[10,11].The vehicle has a wing span of4.5meters and its total weight is20kilograms.Figure13shows theflight data for the Mini vehicle using the guidance logic for path following in the lateral direction.The plot shows the2-dimensional trajectory of the Mini vehicle(solid line)with a commanded desired trajectory(dotted line).The small numbers along the trajectory are theflight times recorded in the onboard avionics.This plot indicates that the vehicle follows the commanded trajectory quite well.When the Mini vehicleflies along the circle the lateral displacement between the vehicle and the desired path remained within±2meters for the75%of itsflight time and within±3meters for96%of theflight time.A similarflight test was performed for the OHS Parent.Figure14shows the trajectory of the Parent vehicle and the commanded path.The autonomous control was activated at t=76[sec]when the vehicle was near(-140m E,200m N).The initial transient,during theflight time between76and90seconds,is due to the offset of the initial velocity vector.After the transient period,the trajectory of the vehicle followed the commanded path within±2meters for the78%of itsflight time and within±3meters for97%of theflight time.With the tight trajectory tracking capability of each aircraft it was demonstrated that the two vehicles can rendezvous from any arbitrary initial positions to a configuration of tight formationflight.The series of plots in Figures15show the positions of the Parent and the Mini in the north-east2-D map.In the11of1612of16test procedure,the OHS Parent vehicle follows the circularflight path,with no knowledge of the Mini vehicle’s location.The Mini vehicle schedules itsflight path and performs formationflight by receivingFigure15.Flight Data-Rendezvous Trajectories of OHS and Mini(O:OHS,M:Mini)Parent at each point in time,and’M’designates the location of the Mini.The OHS Parent had beenflying autonomously and maintaining a circular path when the Mini was switched to autonomous mode.The center of the circle is at the origin.The autonomous control of the Mini vehicle initiates at about40seconds when the Mini was near(-207m E,-8m N),and the Parent was at(-225m E,105m N),and both UAVs were heading approximately south.From time=40[sec]to92[sec],the Parent keptflying along the circle and the Mini generated and scheduled its path,and at about92[sec]the Mini entered the circle.From92[sec] onward the Mini was commanded to track the same circular path while maintaining the separation command relative to the Parent.Although the position plots presented here terminate at120[sec],the Mini and the Parent continued theirflights making two and a half circuits of the circular path together before the Mini was switched back to the manual mode at290[sec].Figure16shows a photo taken from the ground during the formationflight period.During formation flight the separation distance command was reduced gradually by a ground station command from an initial command of30meters,in steps,down to12meters.Thefirst graph in Figure17shows the relative distance13of16Figure16.Formation Flight during Flight Test(The Mini is commanded12meters behind and2meters above the Parent)andseconds the separation distance command was slowly reduced,and the Mini vehicle followed its command within an error of±2meters,for the86%of this period.14of16The bottom graph in Figure17shows the altitude difference between the two vehicles during the formation flight.The command for the altitude difference was set to be2meters in this test,with Mini vehicle higher than OHS Parent.The altitude difference remained within±2meters for84%of the time.For longitudinal control,linear quadratic regulators were used for both vehicles[12].IV.ConclusionsThis paper discussed a new guidance logic for trajectory following and reportedflight test results using this logic to control two ing simulations,it was shown that with the new method a vehicle will follow a desired trajectory better than with the traditional linear technique.The reasons for the better performance can be explained as1.The angleηused in the guidance logic serves three purposes.First,it provides a heading correction.Second,for small deviations from the desired trajectory it provides PD control on cross track error.And third,it provides an anticipatory acceleration command to exactly follow a circular reference trajectory.2.The guidance logic uses the instantaneous vehicle inertial speed in the computation of the accelerationcommand.This kinematic factor adds an adaptive capability with respect to changes in vehicle inertial speed,due to external disturbances,such as wind.AcknowledgmentsThe support by C.S.Draper Laboratory,Inc.is gratefully acknowledged.References1T.Keviczky and Gary J.Balas,“Software enabledflight control using receding horizon techniques,”AIAA Guidance, Navigation,and Control Conference and Exhibit,(AIAA2003-5671),August2003.2R.M.Murray,“Trajectory generation for a towed cable system using differentialflatness,”IFAC World Congress,1996.3R.M.Murray and M.Rathinam,“Configurationflatness of Lagrangian systems underactuated by one control,”Control and Decision Conference,1996.4E.Corban,E.Johnson,and A.Calise,“A six degree-of-freedom adaptiveflight control architecture for trajectory follow-ing.”AIAA Guidance,Navigation,and Control Conference and Exhibit,(AIAA-2002-4776),2002.5D.J.Yost J.E.Kain,“Command to line-of-sight guidance:A stochastic optimal contorl problem,”Journal of Spacecraft, 14(7):438–444,1977.6P.Zarchan,Tactical and Strategic Missile Guidance,volume176of Progress in Astronautics and Aeronautics.AIAA, third edition,1997.7J.H.Blakelock,Automatic Control of Aircraft and Missiles.Wiley-Interscience,1991.8PCUAV web page,/aeroastro/pcuav/,/sanghyuk/www.9S.Park,T.Jones,J.Deyst et al.“The parent and child unmanned aerial vehicle system,”Unmanned Vehicle Systems International Conference,July2003.10J.A.C Kentfield,“Upwashflowfields at the tails and aircraft with outboard horizontal stabilizers.”Conference Paper, AIAA98-0757,Jan1998.11J.Mukherjee,Automatic Control of an OHS Aircraft,Ph.D.thesis,University of Calgary,2000.12S.Park.Avionics and Control System Development for Mid-Air Rendezvous of Two Unmanned Aerial Vehicles,Ph.D. thesis,MIT,February2004.AppendixThis section provides a nonlinear Lyapunov stability analysis for the case of following a straight line desired path.In Figure18,the system model is expressed by the following set of the equations of motion˙d=V sinη2and˙η2=−a sV(18)with the guidance logica s=2V2L1sinη15of16。
基于LOS导航的欠驱动船舶滑模控制
基于LOS导航的欠驱动船舶滑模控制秦梓荷;林壮;李平;李晓文【摘要】考虑存在外界随机海浪干扰和模型参数不确定的欠驱动船舶非线性运动模型,提出一种基于可视距(LOS)导航的滑模控制器.通过设计切换面克服参数不确定以及波浪扰动对反馈控制带来的困难,并在滑模控制的基础上引入低通滤波器,消除因扰动和滑模切换面自身引起的横漂速度和艏摇速度的高频振荡,实现速度的光滑控制.利用李亚普诺夫理论对控制算法的稳定性进行证明,并进行一艘单体船的数值仿真实验.研究结果表明:所设计的控制器是有效的,且具有良好的鲁棒性.【期刊名称】《中南大学学报(自然科学版)》【年(卷),期】2016(047)010【总页数】7页(P3605-3611)【关键词】欠驱动船舶;路径跟踪;可视距导航;滑模控制;鲁棒性【作者】秦梓荷;林壮;李平;李晓文【作者单位】哈尔滨工程大学船舶工程学院,黑龙江哈尔滨,150001;哈尔滨工程大学船舶工程学院,黑龙江哈尔滨,150001;哈尔滨工程大学船舶工程学院,黑龙江哈尔滨,150001;哈尔滨工程大学船舶工程学院,黑龙江哈尔滨,150001【正文语种】中文【中图分类】TP273对欠驱动船舶的轨迹跟踪和路径跟踪控制而言,主要难点在于只有艏摇和纵向速度是直接驱动的,而横漂速度则无驱动。
考虑到经济性,该种欠驱动配置是目前水面船舶最普遍采用的形式[1]。
为确保欠驱动船舶的航行安全,同时提高自动驾驶控制效率,针对欠驱动船舶的控制算法研究具有突出的实际意义。
在欠驱动系统的控制算法方面,已有相关研究成果[2−4]。
目前常用的欠驱动控制方法有反步法、滑模理论、级联理论、李亚普诺夫理论等。
杨莹等[5]基于反步法和参数自适应的方法,针对未知海流以及模型参数不确定情况下欠驱动AUV的三维路径跟踪进行了研究。
DO等[6]基于级联系统方法和利普西斯投影算法,对欠驱动船舶的路径跟踪问题进行了鲁棒自适应算法研究。
丁磊等[7]为解决欠驱动船队的编队控制问题,结合反步法和领导−跟随法设计了编队控制器,实现了多欠驱动系统的位置误差镇定和航向稳定性控制,但未计及波浪扰动的影响。
英文文献总结

E1.Robust Global Trajectory Tracking for Underactuated VTOL Aerial Vehicles using Inner-Outer Loop Control ParadigmsSOURCE:IEEE TRANSACTIONS ON AUTOMATIC CONTROL现有的姿态-位置双闭环稳定控制的思路是通过独立的调节各环节参数实现系统稳定。
但是这一类方法需要控制对象的先验知识,并且在实际使用过程中并不是那么地有效率,因为外界干扰和参数摄动的影响都是不确定的。
为了解决这一方面的限制,提出了不需要对控制对象的动力学模型的先验知识的一种方法。
此方法是结合线性反馈律和前馈律的姿态控制器,提出的此控制器更有利于工程实现。
另外文中使用了SO(3)(李群三维旋转群)对飞行器的坐标系进行了描述。
E2.Robust global trajectory tracking for a class of underactuated vehicles SOURCE:Automatica本文提出解决了具有完全扭矩驱动和单一方向推力的这种特定类别的欠驱动飞行器的轨迹跟踪的问题。
在某些给定的假设下,提出的控制律能够跟踪平滑的参考位置轨迹,同时保证和期望姿态的角度偏差最小。
该方法在有界状态干扰的情况下可以全局地实现,即在不考虑飞行器的初始状态。
所提出的控制器在实验中使用小规模四旋翼飞行器进行测试。
文中利用混合四元数反馈策略为飞行器设计控制器。
同时,在此控制器中提出了对静态加速度扰动具有鲁棒性的积分项,并使用鲁棒的混合系统提取期望的单元四元数,并进行试验进行验证。
此文也是使用SO(3)(李群三维旋转群)对飞行器的坐标系进行了描述。
E3.Dynamics Modeling and Trajectory Tracking Control of a Quadrotor Unmanned Aerial VehicleSOURCE:Journal of Dynamic Systems, Measurement, and Control文中介绍的飞行器轨迹跟踪的功能。
振镜电机离散自抗扰控制器设计与仿真

Modeling and Simulation 建模与仿真, 2023, 12(2), 1670-1677 Published Online March 2023 in Hans. https:///journal/mos https:///10.12677/mos.2023.122155振镜电机离散自抗扰控制器设计与仿真王益涛上海理工大学机械工程学院,上海收稿日期:2023年2月22日;录用日期:2023年3月24日;发布日期:2023年3月31日摘要近年来,激光扫描技术广泛应用于制造业领域,呈现出良好的发展前景。
针对激光振镜扫描系统易于受到内外部扰动等不确定因素影响,提出一种基于离散自抗扰控制器的振镜电机控制结构。
自抗扰控制算法作为一种无模型控制算法,在不准确建模情况下,仍然可以实现很好的响应特性和抗干扰能力。
首先,建立了振镜电机的动力学模型,构建了状态空间方程;接着,将建模误差和外部干扰作为状态变量,建立了扩张状态观测器和改进的PD 控制器,之后对控制器进行了离散化设计。
最后在Simulink 搭建控制系统的仿真模型,仿真实验结果表明,该控制策略实现了良好的动态性能,能够满足实际应用条件。
关键词振镜电机,离散自抗扰控制,激光扫描,计算机仿真Design and Simulation of Discrete Active Disturbance Rejection Controller for Galvanometer MotorYitao WangSchool of Mechanical Engineering, University of Shanghai for Science and Technology, ShanghaiReceived: Feb. 22nd , 2023; accepted: Mar. 24th , 2023; published: Mar. 31st , 2023AbstractAiming at the problem that the laser galvanometer scanning system is easy to be affected by un-certain factors such as internal and external disturbances, a galvanometer motor control structure based on discrete active disturbance rejection (ADRC) controller was proposed. As a model-free control algorithm, active disturbance rejection control algorithm can still achieve good response王益涛characteristics and anti-interference ability under the condition of inaccurate modeling. Firstly, the dynamic model of the galvanometer motor is established, and the state space equation is con-structed. Then, taking the modeling error and external interference as state variables, an extended state observer and an improved PD controller are established, and then the controller is discre-tized. Finally, the simulation model of the control system is built in Simulink. The simulation re-sults show that the control strategy achieves good dynamic performance and can meet the prac-tical application conditions.KeywordsGalvanometer Motor, ADRC, Laser Scanning, Computer SimulationThis work is licensed under the Creative Commons Attribution International License (CC BY 4.0)./licenses/by/4.0/1. 引言激光加工技术是利用激光束作为热源完成焊接、切割、表面处理等加工过程的新兴加工方法。
11澳大利亚船舶运动控制和模型

Dynamic Positioning
Autopilot
Roll stabilisation
03/09/2007
One-day Tutorial, CAMS'07, Bol, Croatia
8
Plant Control System
Generates appropriate actuator commands.
Ship Motion Control and Models
(Module 9)
Dr Tristan Perez
Centre for Complex Dynamic Systems and Control (CDSC)
Prof. Thor I Fossen
Department of Engineering Cybernetics
5
Set-point Regulation, Trajectory Tracking Control or Path Following Control?
Set-Point Regulation: The most basic guidance system is a constant input (set-point) provided by a human operator. The corresponding controller will then be a regulator. Examples of set-point regulation are constant depth, trim, heel and speed control, etc. Trajectory Tracking Control: The objective is for the position and velocity of the vessel to track given desired time-varying position and velocity reference signals. The corresponding feedback controller must then be a trajectory tracking controller. Tracking control can be used for course-changing maneuvers, speed changing, attitude control, etc. An advanced guidance system computes optimal time-varying trajectories from a dynamic model and a predefined control objective. If a constant set-point is used as input to a low-pass filter (reference model) the outputs of the filter will be smooth time-varying reference trajectories for position, velocity and acceleration (PVA). Path Following Control: Follow a path in 3D independent of time (geometric assignment). In addition, a dynamic assignment (speed/acceleration) along the path can be assigned. The corresponding controller is a path following/maneuvering controller.
ControlinRobotics:控制机器人

Mark W. Spong and Masayuki FujitaIntroductionThe interplay between robotics and control theory has a rich history extending back over half a century. We begin this section of the report by briefly reviewing the history of this interplay, focusing on fundamentals—how control theory has enabled solutions to fundamental problems in robotics and how problems in robotics have motivated the development of new control theory. We focus primarily on the early years, as the importance of new results often takes considerable time to be fully appreciated and to have an impact on practical applications. Progress in robotics has been especially rapid in the last decade or two, and the future continues to look bright.Robotics was dominated early on by the machine tool industry. As such, the early philosophy in the design of robots was to design mechanisms to be as stiff as possible with each axis (joint) controlled independently as a single-input/single-output (SISO) linear system. Point-to-point control enabled simple tasks such as materials transfer and spot welding. Continuous-path tracking enabled more complex tasks such as arc welding and spray painting. Sensing of the external environment was limited or nonexistent.Consideration of more advanced tasks such as assembly required regulation of contact forces and moments. Higher speed operation and higher payload-to-weight ratios required an increased understanding of the complex, interconnected nonlinear dynamics of robots. This requirement motivated the development of new theoretical results in nonlinear, robust, and adaptive control, which in turn enabled more sophisticated applications.Today, robot control systems are highly advanced with integrated force and vision systems. Mobile robots, underwater and flying robots, robot networks, surgical robots, and others are playing increasing roles in society. Robots are also ubiquitous as educational tools in K-12 and college freshman experience courses.The Early YearsThe first industrial robot in the United States was the Unimate, which was installed in a General Motors plant in 1961 and used to move die castings from an assembly line and to weld these parts on auto bodies (Fig. 1). Full-scale production began in 1966. Another company with early robot products was Cincinnati Milacron, with companies in Japan and Europe also entering the market in the 1970s. Prior to the 1980s, robotics continued to be focused on manipulator arms and simple factory automation tasks: materials handling, welding, and painting.From a control technology standpoint, the primary barriers to progress were the high cost of computation, a lack of good sensors, and a lack of fundamental understanding of robot dynamics. Given these barriers, it is not surprising that two factors were the primary drivers in the advancement of robot control in these early days. First, with the realization of the close connection between robot performance and automatic control, a community developed that focused on increasing fundamental understanding of dynamics, architecture, and system-level design. In retrospect, we can see that thiswork had some significant limitations:control schemes were mostly based onapproximate linear models and did notexploit knowledge of the naturaldynamics of the robot, vision and forcecontrol were not well integrated intothe overall motion control architecture,and mechanical design and controlsystem design were separate.The second factor was exogenous toboth the controls and roboticscommunities, namely, Moore’s Law.The increasing speed and decreasingcost of computation have been keyenablers for the development andimplementation of advanced, sensor-based control. for robots, and creative new ideas —Control of ManipulatorsBeginning in the mid-1980s, robot manipulatorsbecame a “standard” control application, and the synergies were widely recognized and exploited in research. The earlier research on computed torque and inverse dynamics control [1], for example,helped motivate the differential geometric method of feedback linearization that has been applied to numerous practical problems within and outside of robotics [2]. For fully actuated rigid manipulators, the feedback linearization method was put on a firmtheoretical foundation and shown to be equivalent to the inverse dynamics method [3]. The firstnontrivial application of the feedback linearizationimmediately raised. Standard Hnature of the uncertainty. A solution for the special case of second-order systems, using the small-gain theorem, was worked out in [5], and the general case was presented in [6], which subsequently led to a new area of control now known as L1-optimal control—a prime example of a robotics control contribution leading to new control theory. Several other methods of robust control, such as sliding modes and Lyapunov methods, have also been applied to the robust control problem for robot manipulators.The mid-1980s were also a time of development in adaptive control, and again the connection with robotics was pursued. The fundamental breakthrough in the adaptive control of rigid manipulators was made by Slotine and Li [7]. The key to the solution of the adaptive control problem was the recognition of two important properties of Lagrangian dynamical systems: linearity in the inertia parameters and the skew-symmetry property of the robot inertia matrix [8].Subsequently, the skew symmetry property was recognized as being related to the fundamental property of passivity. The term passivity-based control was introduced in the context of adaptive control of manipulators [9]. Passivity-based control has now become an important design method for a wide range of control engineering applications. Array independent of the time delay.A state-of-the-art teleoperated robot is theDa Vinci surgical system from IntuitiveSurgical, which integrates advances inmicromanipulators, miniature cameras, and amaster-slave control system to enable asurgeon to operate on a patient via a consolewith a 3-D video feed and foot and handcontrols. However, neither force feedbacknor remote operations are supported as yet;the surgeon’s console is typically by thepatient’s side.Mobile Robotsby Brockett’ssystems do not exist [12]. Brockett’smethods , including hybrid switching control and time-varying approaches to stabilization of nonholonomic systems.Mobile robots are now regularly used in many applications. One prominent application is aiding disaster recovery efforts in mines and after earthquakes. Military uses, such as for roadside bomb detection, form another broad category. Recently, products have been developed for consumer applications, such as the Roomba® and other robots from iRobot. Finally, wheeled mobile robots are exploring Mars and are poised to return to the moon.Market Sizes and InvestmentThe robotics industry was slow getting started. Unimation did not show its first profit until 1975, almost a decade after it began full-scale production of its pioneering Unimate robot. Today, the Robotic Industries Association estimates that more than one million robots are in use worldwide; Japan has the largest deployment, with the United States having the second largest.According to one recent market research report from Electronics.ca Publications, the global market for robotics was worth $17.3 billion in 2008 and is projected to increase to $21.4 billion in 2014, a compound annual growth rate (CAGR) of 4.0%. The largest segment of the market is industrial applications, worth $11.5 billion. Industrial robots, with their heavy reliance on the automotive industry, were especially hard hit with the recent global recession—2009 shipments were down 50% from year-ago levels, according to the Robotic Industry Association. Projected growth is lower for this segment than for professional service (market size of $3.3 billion in 2008) and military ($917 million) applications. Domestic services, security, and space applications constitute smaller segments, although the huge success of the Roomba floor-cleaning robot has demonstrated the enormous potential of consumer robotics.Research ChallengesUnderactuationUnderactuated robots have fewer control inputs than degrees of freedom and are a natural progression from flexible-joint and flexible-link robots. Underactuation leads naturally to a consideration of partial or output feedback linearization as opposed to full-state feedback linearization. Consideration of normal forms and zero dynamics is important in this context [13]. Energy/passivity methods are fundamental for the control of underactuated systems.Visual Servo Control and Force ControlThe idea of using imaging or video sensors for robot control is not new; it predates the availability of low-cost, high-quality digital cameras and advances in computational platforms enabling real-time processing of digital video signals. These latter developments have significantly increased interest in the topic.Visual servo control has traditionally used two methodologies, namely, position-based control and image-based control [14]. Position-based control uses vision to estimate the absolute position of the robot and uses the computed position error in the control algorithm. Image-based control, on the other hand, is based on computing the error directly in the image plane of the camera and avoids calculation of the robot position; thus, it is less sensitive to kinematic and calibration errors. Recently, bothposition-based and image-based methods have been incorporated into hybrid switching control strategies in order to take advantage of the strengths and avoid the weaknesses of both approaches. Similar to vision-based control, force control in robotics has also traditionally been divided into two fundamental strategies, in this case, called hybrid position/force control and impedance control, respectively. Hybrid position/force control is based on the observation that one cannot simultaneously control both the position of a robot and the force it imparts to the environment. Thus, the task at hand can be decomposed into “directions” along which either position or force (but not both) is controlled. Conversely, impedance control does not attempt to control or track positions and forces. Rather the “mechanical impedance,” which is the suitably defined Laplace transform of the velocity/force ratio, is the quantity to be controlled.LocomotionThe development of legged robots is motivated by the fact that wheeled robots are not useful in rough terrain or in built structures. The number of legs involved is a free parameter in this research, with robots with as few as one (hopping robots) and as many as eight having been developed by multiple research groups. Bipedal robots are a particularly popular category, both for the anatomical similarity with their creators and because of the research challenges posed by their dynamic instability. An understanding of the dynamics and control of bipedal locomotion is also useful for the development ofprosthetic and orthotic devices to aid humans with disabilities or missing limbs.Readers who have seen videos of Honda’s Asimov robots (Fig. 2) (readers who have not can check YouTube) or other humanoid robots may think that bipedal robots are “for real” now. The accomplishments of this research are indeed impressive. These robots can walk up and down ramps and stairs, counteract pushes and pulls, change gait, roll carts, play table tennis, and perform other functions. But the transition from research laboratory to commercial practice has not been made as yet. In particular, challenges remain for control engineers in the locomotion aspects specifically.Control of bipedal locomotion requires consideration of three difficult issues: hybrid nonlinear dynamics, unilateral constraints, and underactuation. The hybrid nature of the control problem results from impacts of the foot with the ground, which introduce discrete transitions between phases of continuous dynamic motion. Unilateral constraints arise from the fact that the foot can push but not pull on the ground and so the foot/ground reaction forces cannot change sign. Underactuation results again from the(Credit: Gnsin) Figure 2. Honda’s Asimov humanoid robot at Expo 2005 in Aichi, Japan.foot/ground interaction; there is no actuation torque between the foot and the ground. All these difficult issues require advanced methods of control to address them adequately. Energy/passivity methods, geometric nonlinear control, partial feedback linearization, zero dynamics, and hybrid control theory are all fundamental tools for designing rigorous control algorithms for walking [15], [16].Multi-Agent Systems and Networked ControlNetworked control systems and multi-agent systems are important recent application areas for robotics (Fig. 3). Synchronization, coordination, cooperative manipulation, flocking, and swarming combine graph theoretic methods with nonlinear control.The eme rging “hot topic” of cyber-physical systems is also closely related to networked control. Cyber-physical systems will get their functionality through massive networking. Sensors, actuators, processors, databases, and control software will work together without the need to be collocated.Figure 3. Coordinated robots competing in the international RoboCup soccercompetition in 2003. The Cornell team, led by controls researcherRaffaello D’Andrea, won the competition in 1999, 2000, 2002, and 2003.ConclusionsRobotics today is a much richer field than even a decade or two ago, with far-ranging applications. Developments in miniaturization, in new sensors, and in increasing processing power have all openedMeasurement and Control, vol. 109, pp. 310-319, Dec. 1987.[5] M.W. Spong and M. Vidyasagar. “Robust linear compensator design for nonlinear r obotic Control,” IEEE Journal of Robotics and Automation, vol. RA 3, no. 4, pp. 345-350, Aug. 1987.[6] M. Vidyasagar. “Optimal rejection of persistent bounded disturbances,” IEEE Trans. Auto. Control, vol. AC-31, no. 6, pp. 527-534, June 1986.[7] J.-J.E. Slotine and W. Li. “On the adaptive control of robot m anipulators,” Int. J. Robotics Res., vol. 6, no. 3, pp. 147-157, Fall 1987.[8] D. Koditschek. “Natural motion of robot a rms,” in Proc. IEEE Conference on Decision and Control, Las Vegas, 1984.[9] R. Ortega and M.W. Spong. “Adaptive control of robot manipulators: A tut orial,” Automatica, vol. 25, no. 6, pp. 877-888, 1989.[10] R. Anderson and M. W. Spong. “Bilateral teleoperation with time d elay,” IEEE Trans. Aut. Cont., vol. 34, no. 5, pp. 494-501, May 1989.[11] G. Niemeyer and J.-J.E. Slotine. “Stable adaptive teleoperation,” IEEE Journal of Oceanographic Engineering, vol. 16, no. 1, pp. 152–162, 1991.[12] R. W. Brockett. “Asymptotic stability and feedback stabilization,” in Differential Geometric Control Theory, R.W. Brockett, R.S. Millman, and H. J. Sussmann, eds. Boston-Basel-Stuttgart: Birkhauser, 1983, pp. 181-191.[13] A. Isidori and C.I. Byrnes. “Output regulation of nonlinear systems,”IEEE Transactions on Automatic Control, vol. 35, no. 2, pp. 131-140, 1990.[14] S. A. Hutchinson, G.D. Hager, and P.I. Corke. “A tutorial on visual servo c ontrol,” IEEE Transactions on Robotics and Automation, vol. 12, no. 5, pp. 651-670, 1996.[15] E.R. Westervelt, J.W. Grizzle, and D.E. Koditschek. “Hybrid zero dynamics of planar biped w alkers,” IEEE Transactions on Automatic Control, vol. 48, no. 1, pp. 42-56, 2003.[16] M.W. Spong and F. Bullo. “Controlled symmetries and passive w alking,” IEEE Transactions on Automatic Control, vol. 50, no. 7, pp 1025-1031, 2005.Related ContentThe Impact of Control Technology report also includes more than 40 flyers describing specific “success stories” and “grand challenges” in control engineering and science, covering a variety of application domains. The ones below are closely related to the topic of this section.Success Stories∙Dynamic Positioning System for Marine Vessels –S.S. Ge, C.Y. Sang, and B.V.E. How∙Mobile-Robot-Enabled Smart Warehouses –R. D´AndreaGrand Challenges∙Control Challenges in High-Speed Atomic Force Microscopy –S.O.R. Moheimani∙Control for Offshore Oil and Gas Platforms –S.S. Ge, C.Y. Sang, and B.V.E. HowThese flyers—and all other report content—are available at /main/IoCT-report.。
UUV的全局路径跟踪控制

x¢p
(
s)
=
dxp ds
,
y¢p
(
s)
=
dy p ds
,
x¢p¢
(
s)
=
d2 xp ds 2
,
y¢p¢
(
s)
=
d2 yp ds 2
于是, 参考点P ( xp , yp ,0) 沿曲线运动的速度可以
表示为
U p = x¢p2 (s) + y¢p2 ( s)s&
(3)
特 别 的 , 当 s 为 弧 长 参 数 时 , x¢p2 (s) + y¢p2 ( s) = 1 ,
Abstract:The horizontal nonlinear path following control problem is studied. The Serret-Frenet coordinate originating at the free reference point on the path is used to describe the path following errors and their dynamic model, solving the singularity problem in the classic method. The yaw angle is treated as the control input of path following errors, and the stabilization function is designed. The path following errors is proved to be globally asymptotically stable with properly choosing the rate of the path curve parameter. The simulation studies with the linear and circular reference pathes demonstrate the effectiveness of the proposed path following controller. Key Words:Unmanned Underwater Vehicle, Global Path Following, Serret-Frenet Coordinates, Underactuated
欠驱动船舶的航迹跟踪控制研究

摘要目前,海上航行的船舶大多数属于欠驱动船舶,对欠驱动船舶运动控制的研究对于降低设备成本,提高海上航行安全性具有重要意义。
本文对欠驱动船舶的航迹跟踪控制进行研究,主要内容包括:建立船舶6自由度运动的数学模型,分析船舶运动学和动力学特性,做进一步简化后得到欠驱动船舶的3自由度运动模型,为之后的研究和仿真打下基础。
针对路径跟踪控制过程中要求船速保持恒定而无法快速消除横向偏差的问题,将横向偏差和速度控制同时考虑到控制器的设计中,设计了一种基于LOS 引导律的时变速度路径跟踪控制器。
首先运用状态反馈和反步法分别推导出船舶的加速度,再利用最小二乘法对求得的两个加速度进行估计,在此基础上得到最终的控制律。
仿真实验表明所设计的控制器能够使船舶根据横向偏差及其变化率调整速度,更快速地达到预设路径。
针对轨迹跟踪中常规的线性反馈控制容易引起船舶推力饱和以及能耗增加的问题,设计了基于CB引导律的非线性反馈控制器,将船舶轨迹跟踪过程中的位置偏差和速度偏差考虑到控制回路中,调节控制器性能。
设计了三组不同的控制器,在不同的初始条件下对线性反馈控制器和非线性反馈控制器进行对比,仿真实验验证了非线性反馈控制器的优越性。
针对存在外界干扰和模型参数不确定的轨迹跟踪控制问题,引入关于纵向速度偏差的一阶滑模面和关于横向速度偏差的二阶滑模面,设计了轨迹跟踪滑模控制器。
为了在不同的控制要求下得到最优的控制参数,设计了离散时间非线性模型预测和滑模级联的控制器,对滑模参数进行实时在线的优化。
分别以最小跟踪误差,最小到达时间和最低能耗为目标对控制性能进行评价,仿真实验表明经过实时参数优化后的滑模控制器能达到更好的控制效果。
关键词:欠驱动船舶,跟踪控制,引导律,反馈控制,滑模控制AbstractAt present,most of the ships sailing on the sea belong to underactuated ships. The research on the motion control of underactuated ships is of great significance for reducing the cost of equipment and improving the safety of marine navigation.This paper studies the track control of underactuated ships,and the main contents are as follows:To analyze the characteristic of the ship,a6-DOF maneuvering motion mathematic model is established.Then a simplified3-DOF mathematic model for underactuated ships is established,base on which the simulation can be implemented.Considering that the cross-track error can not be quickly eliminated because of the constant surge speed,a two-step speed-varying path following controller for underactuated vessels based on LOS guidance is proposed.The method of least squares is used to find an approximate solution for the ship acceleration,which is derived using state feedback and back stepping method respectively.Under this condition,the ship can adjust its speed according to the cross-track error and its derivative,which leads to faster convergence to the path.To solve the problem of the thrust saturation and the increase of energy consumption caused by conventional linear feedback control for trajectory tracking, nonlinear feedback terms based on the CB guidance law are introduced into the design of controller.Position errors and velocity errors are considered in the nonlinear feedback control loop,which can adjust the performance of the controller.Three cascaded controllers are developed and compared under different initial conditions. The superiority of the nonlinear feedback controller is verified.A sliding mode controller for trajectory tracking in the presence of environment disturbance and model uncertainty is designed.The control law is derived by introducing a first order sliding surface in terms of surge tracking errors and a second one in terms of lateral motion tracking errors.A discrete-time nonlinear model predictive controller is used to update the parameters of the sliding mode control surfaces to achieve minimum tracking error,minimum reaching time and minimum energy objectives.Three controllers are designed and compared through simulation.The results show that the cascaded controller has better performance.Key words:Underactuated ships,tracking control,guidance law,feedback control, sliding mode control目录第1章绪论 (1)1.1研究背景与意义 (1)1.2欠驱动船舶的运动控制特性 (2)1.2.1本质非线性 (2)1.2.2模型不确定 (2)1.2.3外界干扰 (3)1.2.4约束条件 (3)1.3欠驱船航迹跟踪控制研究概述 (4)1.3.1国外相关研究 (5)1.3.2国内相关研究 (7)1.4论文主要研究内容 (10)第2章欠驱动船舶的运动数学模型 (11)2.1参考坐标系的建立 (11)2.2运动学特性 (13)2.2.1线性速度变换 (13)2.2.2角速度变换 (13)2.3动力学特性 (14)2.3.1刚体运动数学模型 (14)2.3.2水动力数学模型 (16)2.3.3环境力数学模型 (19)2.3.4船舶控制力数学模型 (22)2.4欠驱动水面船舶3自由度模型 (22)2.4.1水面船舶3自由度运动数学模型 (22)2.4.2简化的欠驱动船舶水面运动数学模型 (23)2.5本章小结 (24)第3章基于LOS引导算法的变速度路径跟踪控制 (26)3.1LOS引导算法 (26)3.2路径跟踪问题描述 (28)3.3时变速度路径跟踪控制器设计 (30)3.3.1减小横向偏差 (30)3.3.2满足速度控制要求 (31)3.3.3控制律 (32)3.4仿真实验及分析 (32)3.5本章小结 (36)第4章基于CB引导算法的轨迹跟踪状态反馈控制 (37)4.1CB引导算法 (37)4.2反馈控制器设计 (38)4.2.1线性位置反馈和线性位置速度反馈控制器 (38)4.2.1非线性位置反馈和线性速度反馈控制器 (40)4.2.3非线性位置反馈和非线性速度反馈控制器 (42)4.3仿真实验及分析 (42)4.3.1偏差较小的情况 (44)4.3.2偏差较大的情况 (46)4.5本章小结 (49)第5章基于模型预测的轨迹跟踪滑模控制器 (50)5.1滑模变结构控制 (50)5.1.1滑模变结构控制的基本原理 (50)5.1.2滑模控制的趋近律 (53)5.1.3滑模变结构控制器的设计 (54)5.2欠驱动船舶轨迹跟踪滑模控制器设计 (55)5.2.1控制问题描述 (55)5.2.2参考轨迹的确定 (56)5.2.3控制律设计 (57)5.2.4稳定性分析 (59)5.3模型预测与滑模级联控制器设计 (60)5.3.1模型预测控制的基本原理 (60)5.3.2级联控制器设计 (62)5.4仿真实验及分析 (63)5.5本章小结 (70)第6章总结与展望 (71)6.1总结 (71)6.2展望 (72)致谢 (73)参考文献 (74)攻读学位期间公开发表论文 (78)第1章绪论1.1研究背景与意义世界经济的增长使得人类对于海洋资源的需求日益增大,航运业的繁荣使得水路运输和船舶工程也得到了快速发展。
211248175_轨道电路“死区段”成因分析及对策

轨道电路“死区段”成因分析及对策陈 波(中国铁路成都局集团有限公司宜宾工电段,四川宜宾 644699)摘要:从轨道电路“死区段”分类入手,客观分析 “死区段”存在的原因及运用中的危害性,提出彻底消除“死区段”、缩短“死区段”长度及调整渡线绝缘节设置位置的对策。
并结合“死区段”管理现状,提出从设计源头控制、既有设备改进整治、完善规章制度等工作建议,现实操作性强,具有推广借鉴意义。
关键词:轨道电路;死区段;交叉渡线中图分类号:U284.2 文献标志码:A 文章编号:1673-4440(2023)05-0086-06Cause Analysis and Countermeasures of "Dead Zone" in Track CircuitChen Bo(Yibin Track, Communication & Signaling and Power Supply Depot, China Railway Chengdu Group Co., Ltd., Yibin 644699, China)Abstract: Starting from a classification of "dead zones" in track circuit, this paper objectively analyzes the cause reasons of "dead zone" and the harmfulness in track circuit application, and proposes the countermeasures, i.e., eliminating the "dead zones", shortening the "dead zones" and relocating the insulation joint at the scissors crossover. Considering the current situation of "dead zone" management, it also proposes such suggestions as source control through improved design, improvement of existing equipment and improvement of rules and regulations, which have strong operability and high reference significance.Keywords: track circuit; dead zone; scissors crossoverDOI: 10.3969/j.issn.1673-4440.2023.05.018收稿日期:2022-03-17;修回日期:2023-05-03作者简介:陈波(1979—),男,工程师,本科,主要研究方向:铁路信号典型案例分析及对策,邮箱:597582925@ 。
210806389_RBF-ARX模型在海洋船舶系统建模中的应用
科技视界Science &Technology VisionDOI :10.19694/ki.issn2095-2457.2022.29.20RBF-ARX 模型在海洋船舶系统建模中的应用左继红刘丽丽彭德奇(湖南铁道职业技术学院,湖南株洲412001)【摘要】采用RBF-ARX 模型对船舶系统进行建模,阐述了RBF-ARX 模型的建模原理、模型阶次的确定、模型参数辨识问题。
通过仿真模型的预测输出结果,证实了RBF-ARX 模型在描述船舶系统舵角和首摇角偏差全局非线性特征的可行性和有效性。
【关键词】BF-ARX 模型;船舶系统;非线性特征0引言海洋船舶不仅在国防领域还是在民用领域应用越来越广阔,除了运输货物,还可以为海底电缆敷设、护航、打击恐怖等军事任务。
随着经济的发展海洋船舶越来越具有大型、高速、智能控制的特点发展,这样对海洋船舶的安全、经济要求较高,船舶航迹跟踪控制直接影响安全是这些年研究的重点和难点。
船舵和螺旋桨是控制海洋船舶的两个输入量,可以控制三个自动度运动(水平前进、横漂和首摇),具有惯性大、非线性及长滞等特点的欠驱动对象[1]。
查阅船舶航迹跟踪控制相关文献,研究人员主要在建立船舶物理模型的研究居多,比如Miyoshi 等相关研究者都是基于船舶物理模型的线性原理优化了控制器,实现了航向跟踪控制[2-4]。
Path 和M 基于船舶不确定非线性数学模型业优化了控制器,同样也实现了航向跟踪控制。
这些研究在理论上都实现了航向跟踪控制并且效果也较好,但是海洋船舶都是一些大型船舶,建模的精确物理参数不容易测量控制。
本文提出了一种统计建模的方法来描述船舶的动态特性[5-6]。
1船舶系统介绍本文研究的被控对象是招源号船舶(实物如图1),船长46米,型宽10米,型深4米,吃水3米,方向舵面积4平方米,船舵的位置XR 为23米,螺旋桨直径Dp 为2.2米,船型系数Cb 为0.5是船长与宽之比L/B 为4.6。
饱和输入限制下欠驱动自主水下航行器水平面航迹跟踪控制
饱和输入限制下欠驱动自主水下航行器水平面航迹跟踪控制江梦洁;李家旺;吕艳芳;周家炜;黄汉涛【摘要】A saturation controller is designed for the path tracking control of underactuated autonomous underwater vehicles (AUVs) on the horizontal plane within input saturation limitation.A first-order observer is designed to estimate the tracking errors to avoid complicating the controller expressions due to the direct derivation of tracking errors.An improved error dynamic model is derived.A saturated dynamic control strategy for the actual inputs is proposed by utilizing smooth bounded functions as the estimations of the saturated inputs and introducing a Nussbaum-type even function.The stability analysis via the Lyapunov's theory shows that the proposed controller can achieve the tracking of arbitrary smooth paths of AUVs on horizontal plane within input saturation limit,and the tracking errors are globally ultimately uniformly bounded.Some simulated results are presented to illustrate the effectiveness and robustness of the proposed controller.%针对控制输入存在饱和限制的欠驱动自主水下航行器水平面航迹跟踪问题,提出了一种饱和控制方法.在航迹跟踪误差方程基础上,设计了一种误差信号观测器对原有跟踪误差进行近似,以避免由于跟踪误差直接求导所引起的控制器表达式的复杂化现象;推导得到一种新的误差动力学方程,通过引入一种光滑有界函数作为输入饱和条件的近似,以及一种Nussbaum型偶函数,设计了饱和动力学控制器;根据Lyapunov理论证明了该控制器能够使得自主水下航行器在控制输入饱和限制下,可以实现对任意光滑水平面航迹的跟踪控制,并保证跟踪误差是全局最终一致有界的.仿真实验结果验证了该设计方法是有效的,且对于模型参数误差具有一定的鲁棒性.【期刊名称】《兵工学报》【年(卷),期】2017(038)011【总页数】7页(P2207-2213)【关键词】控制科学与技术;欠驱动自主水下航行器;输入饱和;跟踪控制;误差观测器;Nussbaum型函数【作者】江梦洁;李家旺;吕艳芳;周家炜;黄汉涛【作者单位】宁波大学海运学院,浙江宁波315211;宁波大学海运学院,浙江宁波315211;宁波大学海运学院,浙江宁波315211;宁波大学海运学院,浙江宁波315211;宁波大学海运学院,浙江宁波315211【正文语种】中文【中图分类】TP273+.2自主水下航行器(AUV)已经成为重要的军用和民用海洋装备之一。
基于速变LOS的无人船反步自适应路径跟踪控制
基于速变LOS的无人船反步自适应路径跟踪控制余亚磊;苏荣彬;冯旭;郭晨【摘要】[目的]为了解决无人船由系统建模误差和参数摄动引起的混合不确定项、模型含非零非对角项和控制器输入饱和情况下的路径跟踪问题,[方法]提出基于速变视线导航法(LOS)的反步自适应无人船路径跟踪控制方法.首先引入坐标变换法,把系统模型转变为斜对角形式.把控制系统分为制导子系统和控制子系统,在制导子系统设计速变LOS算法,使纵向速度制导律与横向跟踪误差呈正相关,确保无人船能有效地朝着并保持在期望的路径上;在控制子系统设计反步自适应算法以补偿系统混合不确定项,同时引入辅助系统处理系统控制输入饱和问题.[结果]运用李雅普诺夫稳定性理论证明制导—控制闭环系统一致最终有界稳定.[结论]仿真结果验证了所提出方法的有效性和鲁棒性,对无人船反步自适应路径跟踪控制有一定的参考价值.【期刊名称】《中国舰船研究》【年(卷),期】2019(014)003【总页数】9页(P163-171)【关键词】无人船;路径跟踪;视线导航法;输入饱和;自适应控制【作者】余亚磊;苏荣彬;冯旭;郭晨【作者单位】大连海事大学航海学院,辽宁大连116026;大连海事大学航海学院,辽宁大连116026;大连海事大学航海学院,辽宁大连116026;大连海事大学船舶电气工程学院,辽宁大连116026【正文语种】中文【中图分类】U664.820 引言过去十几年,无人船在搜救、科研、探险和商业方面应用广泛[1-5]。
无人船运动控制的主要研究问题有航迹跟踪、编队控制和镇定控制,其中航迹跟踪又分为轨迹跟踪和路径跟踪[6]。
轨迹跟踪指无人船能够在指定的时间到达指定位置;而路径跟踪只需完成几何性质的位置跟踪且不依赖于时间信息。
事实上,船舶在大洋航行时一般不要求在指定时间到达指定地点,而只需沿着计划航线航行,因而路径跟踪对于航海实践具有更大的研究意义[7]。
Wang 等[8-14]在基于视线(Line-of-Sight,LOS)导航法的路径跟踪制导研究方面取得了许多成果。