第五届飞思卡尔杯智能汽车竞赛决赛南京理工大学南理工摄像头1队技术报告
飞思卡尔智能车竞赛设计方案
飞思卡尔智能车竞赛设计⽅案“神马”队设计⽅案摘要本⽂以“飞思卡尔”杯全国⼤学⽣智能车竞赛为主题,介绍了智能赛车从机械结构设计到控制系统的软硬件设计流程。
本次⽐赛使⽤竞赛秘书处统⼀指定的竞赛车模及套件,采⽤飞思卡尔半导体公司的16位微控制器作为核⼼控制单元,配合不同类型的传感器、驱动电机、转向舵机、直流电池、以及相应的驱动电路,使赛车能够⾃主识别路径,并控制模型车⾼速稳定地在跑道上运⾏,在规定时间内完成跑完赛道的任务。
第⼀章背景1.1“飞思卡尔”杯背景介绍“飞思卡尔”杯全国⼤学⽣智能车竞赛是在飞思卡尔半导体公司资助下举办的以S12 单⽚机为核⼼的⼤学⽣课外科技竞赛。
使⽤⼤赛组委会统⼀提供的竞赛车模、转向舵机、直流电机和可充电式电池,采⽤飞思卡尔 16 位微控制器MC9S12DB128B作为核⼼控制单元,⾃主构思控制⽅案及系统设计,包括传感器信号采集处理、控制算法及执⾏、电机驱动、转向舵机控制等,完成智能车⼯程制作及调试,于指定⽇期与地点参加场地⽐赛。
⽐赛成绩主要由赛车在现场成功⾏驶完赛道的时间为主。
全国⼤学⽣智能汽车竞赛所使⽤的车模是⼀款带有差速器的后轮驱动模型赛车,它由⼤赛组委会统⼀提供。
参赛队伍通过设计单⽚机的⾃动控制器控制模型车在封闭的跑道上⾃主循线运⾏。
在保证模型车运⾏稳定,即不冲出跑道的前提下,跑完两圈的时间越⼩成绩越好。
设计⾃动控制器是制作智能车的核⼼环节。
⾃动控制器是以单⽚机为核⼼,配合有传感器、电机、舵机、电池、以及相应的驱动电路,它能够⾃主识别路径,控制模型车⾼速稳定运⾏在跑道上。
⽐赛跑道表⾯为⽩⾊,中⼼有连续⿊线作为引导线,⿊线宽 25cm。
⽐赛规则限定可赛道宽度和拐弯最⼩半径等参数,赛道具体形状在⽐赛当天现场公布。
控制器⾃主识别引导线并控制模型车沿着赛道运⾏。
在严格遵守规则中对于电路限制条件,保证智能车可靠运⾏前提下,电路设计尽量简洁紧凑,以减轻系统负载,提⾼智能车的灵活性,同时坚持充分发挥创新原则,以简洁但功能完美为出发点,并以稳定性为⾸要前提,实现智能车快速运⾏。
第五届全国大学生“飞思卡尔”杯智能汽车竞赛规则与赛场纪律
第五届全国大学生“飞思卡尔”杯智能汽车竞赛竞速比赛规则与赛场纪律参赛选手须使用竞赛秘书处统一指定的竞赛车模套件,采用飞思卡尔半导体 公司的 8 位、16 位微控制器作为核心控制单元,自主构思控制方案进行系统设计,包括传感器信号采集处理、电机驱动、转向舵机控制以及控制算法软件开发 等,完成智能车工程制作及调试,于指定日期与地点参加各分赛区的场地比赛, 在获得决赛资格后,参加全国总决赛的场地比赛。
参赛队伍的名次(成绩)由赛 车现场成功完成赛道比赛时间为主,技术报告、制作工程质量评分为辅来决定。
大赛根据车模检测路径方案不同分为电磁、光电与摄像头三个赛题组。
车模通过 感应由赛道中心电线产生的交变磁场进行路径检测的属于电磁组;车模通过采集 赛道图像(一维、二维)进行路径检测的属于摄像头组;车模通过采集赛道上少 数孤立点反射亮度进行路径检测的属于光电组。
竞赛秘书处制定如下比赛规则适用于各分赛区预赛以及全国总决赛,在实际 可操作性基础上力求公正与公平。
一、器材限制规定1. 须采用统一指定的车模。
本届比赛指定采用两种车模:z A 型车模:广东博思公司提供。
限定电磁组比赛使用。
z B 型车模:北京科宇通博科技有限公司提供。
限定光电组、摄像头组使用。
z 细节及改动限制见附件一。
2. 须采用飞思卡尔半导体公司的 8 位、16 位处理器(单核)作为唯一的微控制器。
z 有关细节及其它电子器件使用的限制见附件二;3. 参加电磁赛题组不允许使用传感器获取道路的光学信息进行路径检测。
z 参加光电赛题组中不允许传感器获取道路图像信息进行路径检测。
z 参加摄像头赛题组可以使用光电管作为辅助检测手段。
4. 其他事项z 如果损毁车模中禁止改动的部件,需要使用相同型号的部件替换;z 车模改装完毕后,尺寸不能超过:250mm 宽和 400mm 长。
二、有关赛场的规定1. 赛道基本参数(不包括拐弯点数、位置以及整体布局)见附件三;2. 比赛赛道实际布局将在比赛当日揭示,在赛场内将安排采用制作实际赛道的 材料所做的测试赛道供参赛队进行现场调试;三、裁判及技术评判 竞赛分为分赛区和全国总决赛两个阶段。
飞思卡尔智能车摄像头组技术报告 (2)
第十届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告摘要本文设计的智能车系统以K60微控制器为核心控制单元,基于CCD摄像头的图像采样获取赛道图像信息,提取赛道中心线,计算出小车与黑线间的位置偏差,采用PD方式对舵机转向进行反馈控制。
使用PID控制算法调节驱动电机的转速,结合特定算法分析出前方赛道信息实现对模型车运动速度的闭环控制。
为了提高模型车的速度和稳定性,我们用C++开发了仿真平台、蓝牙串口模块、SD卡模块、键盘液晶模块等调试工具,通过一系列的调试,证明该系统设计方案是确实可行的。
关键词:K60,CCD摄像头,二值化,PID控制,C++仿真,SD卡AbstractIn this paper, we will design a intelligent vehicle system based on MC56F8366 as the micro-controller unit. using the CCD image sensor sampling to the track image information to extract the track line center, to calculate the positional deviation between the car with the black line, the use of PD on the rudder. The machine turned to the feedback control. We use PID control algorithm to adjust the speed of the drive motor, combined with specific algorithms to achieve closed-loop control of the movement speed of the model car in front of the track. In order to improve the speed and stability of the model car, we use the C++ to develop a simulation platform, Bluetooth serial module, SD card module, keyboard, LCD modules, debugging tools. Through a series of debugging, the system design is feasible.Key words: K60,CCD_camera, binaryzation, PID control, C++ simulation, SD card目录第1章引言................................................................................... - 1 - 第2章系统总体设计................................................................ - 2 - 2.1 系统分析..................................................................................... - 2 - 2.2 车模整体布局............................................................................. - 3 - 2.3 本章小结....................................................................................... - 4 - 第3章系统机械设计及实现................................................... - 5 - 3.1 前轮定位的调整......................................................................... - 5 -3.1.1主销内倾..............................................................................- 6 -3.1.2 后倾角.................................................................................- 6 -3.1.3 内倾角.................................................................................- 7 - 3.2 舵机安装....................................................................................... - 8 -3.2.1 左右不对称问题的发现与解决........................................- 10 - 3.3 编码器的安装............................................................................ - 10 - 3.4 摄像头安装.................................................................................- 11 -3.4.1 偏振镜的使用......................................................................- 12 -3.4.2 摄像头的标定......................................................................- 12 - 3.5 摄像头的选用.............................................................................- 13 - 3.6 红外接收装置.............................................................................- 14 -3.7 防止静电复位.............................................................................- 15 - 3.8 本章小结.......................................................................................- 15 - 第4章硬件电路系统设计及实现 ...................................... - 16 -4.1 硬件设计方案............................................................................- 16 - 4.2 电源稳压......................................................................................- 17 - 4.3 电机驱动......................................................................................- 18 - 4.4 图像处理部分............................................................................- 19 -4.4.1 摄像头升压电路.............................................................- 19 -4.4.2 视频分离电路.................................................................- 19 -4.4.3 硬件二值化.....................................................................- 19 - 4.5 灯塔电路......................................................................................- 21 - 4.6 本章小结......................................................................................- 21 -第5章系统软件设计.............................................................. - 22 -5.1 软件流程图...............................................................................- 22 - 5.2 算法新思路...............................................................................- 23 -5.2.1中心线提取.......................................................................- 23 -5.2.2 直角检测........................................................................... - 24 -5.2.3 单线检测......................................................................... - 24 - 5.3 舵机控制.....................................................................................- 25 - 5.4 速度控制.....................................................................................- 26 - 5.5 PID算法....................................................................................- 26 - 5.6 路径优化.....................................................................................- 31 -第6章系统联调...................................................................... - 33 - 6.1 开发工具.................................................................................... - 33 - 6.2 无线调试蓝牙模块及蓝牙上位机..........................................- 33 - 6.3 键盘加液晶调试......................................................................- 34 - 6.4 TF卡调试模块.........................................................................- 34 -6.4.1 TF卡.............................................................................- 34-6.4.2 SDCH卡 .........................................................................- 35 -6.4.3 软件实现.......................................................................- 36 - 6.5 C++上位机设计........................................................................- 36 - 6.6 电源放电模块...........................................................................- 38-6.6.1 镍镉电池记忆效应…………………………………….. - 39-6.6.2 放电及电池性能检测设备…………………………….. - 39- 6.7 本章小结....................................................................................- 40 - 第7章模型车技术参数........................................................ - 41 - 第8章总结............................................................................... - 42 - 参考文献...................................................................................... - 44 -第1章引言在半导体技术日渐发展的今天,电子技术在汽车中的应用越来广泛,汽车智能化已成为行业发展的必然趋势。
智能车ppt

方案设计
传感器设计方案: 安装摄像头时,要考虑的因素很多,主要有以下几 点: 1. 确保摄像头位置的居中,因为当摄像头不居中时, 其采集进来的图像也不是居中的,而处理程序对舵机 输出量是居中的,这样就会导致模型车在直道上也会 存在左右摆动的问题。 2. 摄像头的高度要足够高,这样可以使得模型车在摄 像头的角度不是很高的情况下就能够前瞻到前方足够 远处的路况信息,因为当摄像头的角度过大时候,
名 次
1 2 3
学校名称
湖南大学
比赛成 绩
30.299
北京科技大 30.311 学 山东大学 30.405
摄像头组决赛成绩
名次 1 2 3 4 5 6 7 8 学校名称 湖南大学 北京科技大学 山东大学 杭州电子科技大 学信息工程学院 西北工业大学 队伍名称 睿思队 北京科技大学摄 像头一队 白杨队 杭电信工5队 翱翔队 钱江5号 Drift 雏鹰队 比赛成绩 30.299 30.311 30.405 30.818 30.894 31.692 31.694 31.99
杭州电子科技大 学 华东理工大学
河海大学常州校 区
摄像头
在调查资料后,发现摄像头组的智能车在处理采集的 信号后再转换为单片机所需的信号所用的时间需要 20ms,而电磁和光电组的处理信号在10~20us之间, 我们组觉得这个可以是个突破点。 由于制作摄像头组的智能车需要有关于图像处理方面 的知识,而我们组的组员都是通信工程专业的学生, 今后发展可能会和图像处理,视频方面是工作挂钩。 去年我们学校代表队在摄像头组方面取的成绩相比于 其他组较好,所以我们能利用到更好的前辈资源。 我们发现摄像头组在采集信号,处理信号比其他组的 较为麻烦,所以觉得这是突破点。
杭州电子科技大学_钱江1号队(光电组)_技术报告

技 术 报 告
学
校:杭州电子科技大学
队伍名称:钱江 1 号队 参赛队员:谢文球 带队教师:高明煜 居正 陈龙 李武军
-1-
关于技术报告和研究论文使用授权的说明
本人完全了解第五届“飞思卡尔”杯全国大学生智能汽车邀请赛关保 留、 使用技术报告和研究论文的规定, 即: 参赛作品著作权归参赛者本人, 比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作 品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内 容编纂收录在组委会出版论文集中。
4.4 舵机摆头与打角子程序设计 .................................................................- 24 4.4.1 随动舵机控制程序设计 ..............................................................- 24 4.4.2 前轮舵机 PD 打角控制程序设计 ...............................................- 25 4.5 速度控制子程序设计 .............................................................................- 26 4.5.1 速度的给定 ..................................................................................- 26 4.5.2 速度 PID 控制 ..............................................................................- 26 4.6 软件部分总结 .........................................................................................- 26 第五章 开发工具、制作、安装、调试过程说明 ..............................................- 29 5.1 Codewarrior IDE 的安装与使用 .............................................................- 29 5.1.1 工程的创建 ..................................................................................- 29 5.1.2 程序源代码的编辑、编译与链接 ..............................................- 31 5.1.3 BDM 调试 .....................................................................................- 31 5.2 现场调试 .................................................................................................- 33 5.3 调试中遇到的问题及解决过程 .............................................................- 34 5.3.1 高速舵机问题 ..............................................................................- 34 5.3.2 光点宽度问题 ..............................................................................- 34 第六章 车模技术参数说明 ..................................................................................- 35 6.1 车模主要技术参数 .................................................................................- 35 6.2 机械部分其它参数 .................................................................................- 35 6.3 电路中芯片的种类及数量 .....................................................................- 35 6.4 其它技术参数 .........................................................................................- 36 6.5 设计过程中用到的主要软件工具 .........................................................- 36 第七章 总结 ..........................................................................................................- 37 致 谢 ..............................................................................................................- 39 参考文献 ................................................................................................................- 40 附录 B 车模系统 C 语言源程序 ....................................................................................
南京理工大学紫金学院 摄像头一组

主销内倾角如图2—2—4—1 前轮外倾
前轮旋转平面上略向外倾斜,称为前轮外倾。作用是为了提高转向操纵的轻便性和车 轮行驶的安全性。前轮外倾与主销内倾相配合能使汽车转向轻便。前外倾角一般为 1°。外 倾角不宜过大,否则会使轮胎产生偏磨损。
前轮外倾如图2—2—4—2
5
第十届全国大学生智能汽车竞赛技术报告
参赛队员签名:
带队教师签名:
日
期:
2015.8.18
II
摘要
本文设计的智能车以飞思卡尔公司的 MK60FN1M0VLQ15 微控制器作为核心控 制单元,通过 CMOS 摄像头检测赛道信息,使用模拟比较器对图像进行硬件二值 化,从而控制智能车的运动。再通过旋转编码器对车速进行实时测量,以及模 糊 PID 控制算法实现智能车电机的闭环控制,为了提高智能车的速度和稳定性, 增加调试效率,使用 VS2010,C#上位机,液晶屏等调试工具,对该系统进行了 一系列的调试,结果证明,该系统方案可行。
第十届“飞思卡尔”杯全国大学生 智能汽车竞赛
技 术 报 告
学校:南京理工大学紫金学院 队伍名称:摄像头一组 参赛队员:季磊 张馨文 钱振耀 带队老师:李盛辉 陈姝君
I
关于技术报告和研究论文使用授权的说明
本人完全了解第十届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使 用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委 会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、 技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会 出版论文集中。
2.2.3摄像头的安装
摄像头我们选用的是OV7725。OV7725 信噪比更高、速度更快、稳定性更好 和微光灵敏度更高,OV系列三十万像素当中成像质量很好的摄像头,野火鹰眼, 是一个硬件二值化摄像头,直接输出二值化图像,一次传输8 个像素,相比与 黑白摄像头一次传输一个像素快8 倍、彩色摄像头两次传输一个像素快16 倍。 摄像头的位置是整车上最高点,为了降低重心,采用了较轻的碳素杆作为
飞思卡尔杯全国大学生智能汽车邀请赛北理风行者车队技术报告
速度检测模块由 S12 的增强型捕捉计数模块、传感器和外围电路组成,通过 检测赛车的实时车速为赛车的车速控制提供控制量。
2.3 智能车系统软件结构设计
如果说系统硬件对于智能车来说是它的骨架和躯体,那么软件算法就是它的 思想。软件算法的优劣直接体现了智能车辆的“智能”高低。所以软件系统对于智 能车来说至关重要。 首先,赛车系统通过路径识别模块获取前方黑色引导线的信息, 同时通过速度检测模块实时获取赛车的速度。 利用连续路径识别算法求得赛车与黑 线位置的偏差,接着采用 P 方法对舵机进行控制,根据检测到的实时车速,结合模 糊控制策略对赛车速度进行恰当的控制调整,使赛车在符合比赛规则情况下沿赛道
50cm 316mm 172m 18/76
图 3.1 模型车的底盘结构
3.2 智能车运动学状态方程
在只考虑车辆的平面运动情况下,当转向时,车辆只做平面运动及平面旋转 运动,如图 3.2、3.3 所示。
Vf Vr
w
L
图 3.2 小车转向示意图
R
L
图 3.3 转向平面图
2 w
Vr
由角速度的定义可知
TR
以智能汽车为研究背景的科技创意性制作,是一种具有探索性的工程实践活 动,其本质也是人类创造有用人工物的一种训练性实践,其过程属性是综合,而结 果属性很可能是创造。通过竞赛,参赛的同学们培养了对已学过的基础与专业理论 知识与实验的综合运用的能力;带着背景对象中的各种新问题,学习控制、模式识 别、传感技术、电子、电气、计算机、机械等多个学科新知识,包括来自不同学科 背景大学生的相互学习,逐渐学会了在学科交叉、集成基础上的综合运用;若是以 实用为目的,还必须考虑考虑可靠性、寿命、外观工业设计、集成科学与非科学, 在具体约束条件下融合形成整体的综合运用。这样的训练是很有意义的。
飞思卡尔杯全国大学生智能汽车竞赛技术报告_摄像头组
第十届"飞思卡尔"杯全国大学生智能汽车竞赛技术报告第十届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:电子科技大学摘要本文设计的智能车系统以MK60DN512ZVLQ10微控制器为核心控制单元,通过CMOS摄像头检测赛道信息,使用模拟比较器对图像进行硬件二值化,提取黑色引导线,用于赛道识别;通过编码器检测模型车的实时速度,使用PID控制算法调节驱动电机的转速和转向舵机的角度,实现了对模型车运动速度和运动方向的闭环控制。
关键字:MK60DN512ZVLQ10,CMOS,PIDAbstractIn this paper we will design a smart car system based on MK60DN512ZVLQ10as the micro-controller unit. We use a CMOS image sensor to obtain lane image information. Then convert the original image into the binary image by the analog comparator circuit in order to extract black guide line for track identification. An inferred sensor is used to measure the car`s moving speed. We use PID control method to adjust the rotate speed of driving electromotor and direction of steering electromotor, to achieve the closed-loop control for the speed and direction.Keywords: MK60DN512ZVLQ10,CMOS,PID目录摘要 (II)Abstract (III)目录............................................................................................................................ I V 引言.. (1)第一章系统总体设计 (2)1.1系统概述 (2)1.2整车布局 (3)第二章机械系统设计及实现 (4)2.1智能车机械参数调节 (4)2.1.1 前轮调整 (4)2.1.2其他部分调整 (6)2.2底盘高度的调整 (7)2.3编码器的安装 (7)2.4舵机转向结构的调整 (8)2.5摄像头的安装 (9)第三章硬件系统设计及实现 (11)3.1 MK60DN512ZVLL10主控模块 (12)3.2电源管理模块 (12)3.3 摄像头模块 (14)3.4电机驱动模块 (15)3.5测速模块 (16)3.6陀螺仪模块 (16)3.7灯塔检测模块 (16)3.8辅助调试模块 (17)第四章软件系统设计及实现 (19)4.1赛道中心线提取及优化处理 (19)4.1.1原始图像的特点 (19)4.1.2赛道边沿提取 (20)4.1.3推算中心 (21)4.1.4路径选择 (23)4.2 PID 控制算法介绍 (23)4.2.1位置式PID (24)4.2.2增量式PID (25)4.2.3 PID参数整定 (25)4.3转向舵机的PID控制算法 (25)4.4驱动电机的PID控制算法 (26)第五章系统开发及调试工具 (27)5.1开发工具 (27)5.2上位机图像调试 (27)5.3SD卡模块 (27)5.3.1SD卡介绍 (27)5.3.2 SPI总线介绍 (28)5.3.3软件实现 (28)第六章模型车的主要技术参数 (30)结论 (31)参考文献 (I)附录A:电原理图 (II)附录B:程序源代码................................................................................................... I V引言随着科学技术的不断发展进步,智能控制的应用越来越广泛,几乎渗透到所有领域。
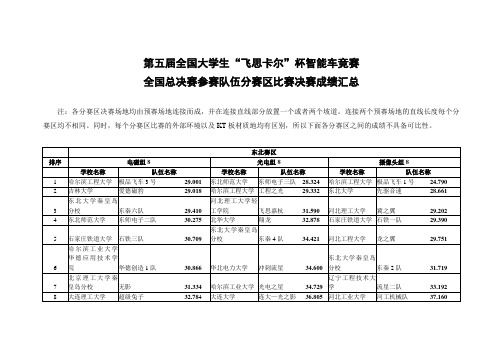
第五届全国大学生“飞思卡尔”杯智能车竞赛决赛成绩汇总
华硕二队25.266
8
上海电力学院
电自二队30.211
江苏科技大学
鹰之歌32.969
浙江理工大学
天速星27.760
9
浙江师范大学
低空飞翔30.533
河海大学
荷风33.914
南京理工大学
南理工摄像头1队27.870
10
南京理工大学
南理工电磁1队30.758
三江学院
三电二队34.627
河海大学常州校区
9
华北赛区
电磁组8
光电组9
摄像头组8
学校名称
队伍名称
学校名称
队伍名称
学校名称
队伍名称
1
北京理工大学
星际航行者24.101
北京科技大学
北京科技大学
光电一队22.051
北京科技大学
北京科技大学
摄像头一队21.405
2
天津工业大学
天津工业大学
磁导航一队25.830
北京科技大学天津学院
战鹰队25.370
北京科技大学天津学院
华德创造1队30.866
华北电力大学
冲刺流星34.600
东北大学秦皇岛分校
东秦2队31.719
7
北京理工大学秦皇岛分校
无影31.334
哈尔滨工业大学
光电之星34.729
辽宁工程技术大学
流星二队33.192
8
大连理工大学
超级兔子32.784
大连大学
连大—光之影36.805
河北工业大学
河工机械队37.160
西部赛区
电磁组9
光电组8
摄像头组9
学校名称
队伍名称
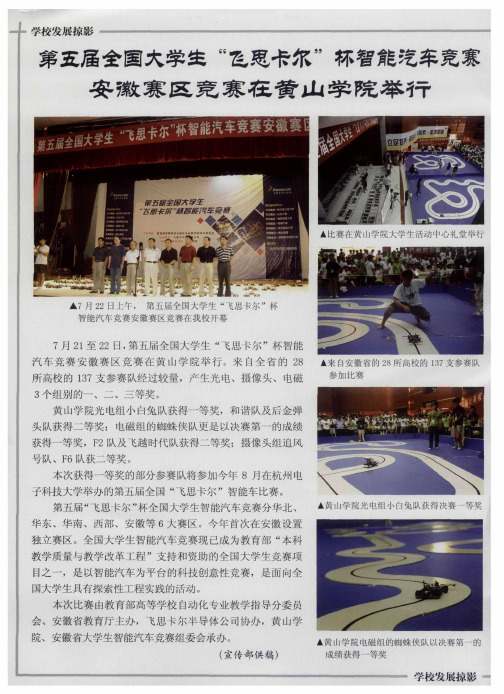
第五届全国大学生“飞思卡尔”杯智能汽车竞赛安徽赛区竞赛在黄山学院举行
l
( 宣传部供稿 )
成绩获得 一等奖
学 校发 展掠 影
学校 发 展 掠 影
第互届 全 国大掌 生 “ 飓卡尔 "杯 智能 汔率 宽褰 色
安 徽 塞区 宽塞在 黄 山掌院举仟
▲比赛在黄 山学 院大学 牛活动 中心 礼堂举
▲7月 2 2目上午 , 第 五届全 国大学生 “ 飞思卡尔 ”杯 智 能汽 车竞赛安徽赛区竞赛在我校开幕
l
7 2至2 月 1 2日, 第五届全国大学生 “ 飞思卡尔”杯智能
ቤተ መጻሕፍቲ ባይዱ
8所高校的 17支参赛队 3 i 汽车竞赛安徽赛区竞赛在黄山学院举行。来 自全省的 2 ▲来 自安徽省的 2 8 l 所高校的 17 3 支参赛队经过较量, 产生光电、摄像头、电磁 参加 比赛 l 3 个组别的一、二、三等奖。 l 黄山学院光电组小白兔队获得一等奖,和谐队及后金弹 l 头队获得二等奖;电磁组的蜘蛛侠队更是以决赛第一的成绩 l 获得一等奖,F 队及飞越时代队获得二等奖;摄像头组追风 2 l 号队、F 6队获二等奖。 i 本次获得一等奖的部分参赛队 将参加今年 8月在杭州电 i 子科技大学举办的第五届全国 “ 飞思卡尔”智能车比赛。 i 第五届“ 飞思卡尔” 杯全国大学生智能汽车竞赛分华北、 ▲黄 山学 院 光 电 组 小 白兔 队 获 得 决 赛 一 等 奖 l 华东、华南、西部、安徽等 6 大赛区。今年首次在安徽设置 i 独立赛区。全国大学生智能汽车竞赛现已成为教育部 “ 本科 l 教学质量与教学改革工程”支持和资助的全国大学生竞赛项 l 目 之一,是以智能汽车为平台的科技创意性竞赛,是面向全 l 国大学生具有探索性工程实践的活动。 l 本次比赛由教育部高等学校自 动化专业教学指导分委员 l 会、安徽省教育厅主办,飞思卡尔半导体公司协办, 黄山学 i 院、安徽省大学生智能汽车竞赛组委会承办。 ▲黄 山学 院电磁 组的蜘蛛侠队 以决赛第一的
(完整word版)飞思卡尔智能车技术报告
集成化的设计思路的好处是原件密度高,系统可以小型化一体化,通过综合考虑各方面因素,在确定了系统最终硬件方案不做大的更改的情况下,在确保了系统可靠性的前提下,最终选择了一体化,集成化的硬件设计思路。使车体硬件电路布局紧凑,稳定可靠。
3、大前瞻,高分辨率方案。
在光电传感器的安装不影响赛车行驶的前提下,尽可能的提高传感器前瞻,更大的前瞻,能为赛车提供更多的信息,更能让赛车提前作出决策。
3.5.2主销内倾角
主销内倾角是指主销在汽车的横向平面内向倾斜一个角度,即主销轴线与地面垂直线在汽车横向断面内的夹角。主销内倾角也有使车轮自动回正的作用。通常汽车主销内倾角不大于80。
2.5.3前轮外倾角
通过车轮中心的汽车横向平面与车轮平面的交线与地面垂线之间的夹角称为“前轮外倾角”。轮胎呈现“八”字形张开时称为“负外倾”,而呈现“V”字形张开时称为“正外倾”。一般前轮外倾角为10左右。
4.5速度检测模块
为了使车在跑的过程中能快速加速,及时减速除了要有好的算法来控制,还依赖于速度闭环返回的速度脉冲值的可靠度和精确度,因此为了提高检测精度,最后选用了精度较高的光电编码器,光电编码器使用5V-24V电源,输出12.5%-85%VCC的方波信号。
9.2存在的不足
9.3可改进的方法
第十章参考文献
第一章引言
1.1方案介绍
系统硬件设计可以说是整个智能车设计的基础和重中之重。正确的硬件设计方向与思路,是系统稳定可靠的基础,功能强大的硬件系统,更为软件系统的发挥提供了强大的平台。、
1、整车低重心设计。
通过以往几届比赛的经验我们看到,往往重心低,体积小巧,布局紧凑的赛车更能取得好的成绩。、于是,我们通过合理布局电路板和各种传感器,尽可能地降低整车重心。在不影响传感器前瞻,或者不过度牺牲传感器性能的情况下,尽量降低光电传感器的高度,以提高赛车的侧翻极限。
智能车大赛技术报告(最终版)
目录第一章引言 (1)第二章智能小车设计分析 (2)2.1设计要求 (2)2.2总体设计 (2)2.3 方案论证 (3)2.3.1 传感器设计方案 (3)2.3.2 控制算法设计方案 (4)第三章智能小车硬件设计 (5)3.1机械设计 (5)3.1.1 车模结构特点 (5)3.1.2 寻迹传感器布局 (5)3.1.3 系统电路板的固定及连接 (7)3.2电路设计 (7)3.2.1传感器电路设计 (7)3.2.2测速传感器的设计 (8)3.2.3 电源管理模块 (9)3.2.4驱动模块 (10)3.2.5 调试模块 (11)第四章智能小车软件设计 (12)4.1 总体流程图 (12)4.2 PID控制算法 (13)4.3舵机方向控制算法 (14)4.4 速度控制算法 (14)第五章开发流程 (16)5.1单片机资源划分 (16)5.2编译环境 (16)5.3下载调试 (16)第六章开发总结与心得 (17)6.1 开发与调试过程 (17)6.2 开发中遇到的几个典型问题 (18)6.2.1电源管理问题 (18)6.2.2 PID微分误差的问题 (19)6.2.3 电机电磁干扰的问题 (20)6.3 总结与展望 (20)参考文献 (22)附录A:研究论文 (I)附录B:程序清单 (XVII)附录C:红外传感器参数说明 .................................................................................... X XXVI 附录D:配件清单 .. (XXXVII)II第一章引言智能小车以飞思卡尔16位微控制MC9S12DG128B为控制器,采用多传感器进行信息采集,运用反射式红外传感器设计路径检测模块和速度监测模块。
同时,采用PWM技术,控制舵机的转向和电机转速。
系统还扩展了LCD(Liquid Crystal Display:液晶显示屏)和键盘模块作为人机操作界面,以便于智能小车的相关参数调整。
飞思卡尔智能车电磁组技术报告
第十届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告摘要本文以第十届全国大学生智能车竞赛为背景,介绍了基于电磁导航的智能赛车控制系统软硬件结构和开发流程。
该系统以Freescale半导体公司32 位单片机MK60DV510ZVLQ100为核心控制器,使用IAR6.3程序编译器,采用LC选频电路作为赛道路径检测装置检测赛道导线激发的电磁波来引导小车行驶,通过增量式编码器检测模型车的实时速度,配合控制器运行PID控制等控制算法调节驱动电机的转速和转向舵机的角度,实现了对模型车运动速度和运动方向的闭环控制。
同时我们使用集成运放对LC选频信号进行了放大,通过单片机内置的AD采样模块获得当前传感器在赛道上的位置信息。
通过配合Visual Scope,Matlab等上位机软件最终确定了现有的系统结构和各项控制参数。
实验结果表明,该系统设计方案可使智能车稳定可靠运行。
关键字:MK60DV510ZVLQ100,PID控制,MATLAB,智能车第十届全国大学生智能汽车邀请赛技术报告目录第一章引言 (5)第二章系统方案设计 (6)2.1系统总体方案的设计 (6)2.2系统总体方案设计图 (6)电磁传感器模块 (7)控制器模块 (7)电源管理模块 (7)编码器测速模块 (7)舵机驱动模块 (8)起跑线检测模块 (8)人机交互模块 (8)测距模块 (8)第三章机械结构调整与优化 (8)3.1智能车前轮定位的调整 (8)主销后倾角 (9)3.1.2主销内倾角 (9)3.1.3 前轮外倾角 (10)3.1.4 前轮前束 (10)3.2 舵机的安装 (11)3.3编码器安装 (12)3.4车体重心调整 (12)3.5传感器的安装 (13)3.6测距模块的安装 (14)第四章硬件电路设计 (15)4.1单片机最小系统 (15)4.2电源管理模块 (16)4.3电磁传感器模块模块 (17)4.3.1 电磁传感器的原理 (17)4.3.2 信号的检波放大 (18)4.4编码器接口 (19)4.5舵机驱动模块 (20)4.6电机驱动模块 (20)4.7人机交互模块 (21)第五章控制算法设计说明 (22)5.1主要程序流程 (22)5.2赛道信息采集及处理 (23)5.2.1 传感器数据滤波及可靠性处理 (23)5.2.2 位置偏差的获取 (25)5.3 控制算法实现 (27)5.3.1 PID算法原理简介 (27)5.3.2基于位置式PID的方向控制 (31)5.3.3 基于增量式PID和棒棒控制的速度控制 (31)5.3.4 双车距离控制和坡道处理 (33)第六章系统开发与调试 (34)6.1开发环境 (34)6.2上位机显示 (35)6.3车模主要技术参数 (36)第七章存在的问题及总结 (37)7.1 制作成果 (37)7.2问题与思考 (37)7.3不足与改进 (37)参考文献 (38)附录A 部分程序代码 (39)第十届全国大学生智能汽车邀请赛技术报告第一章引言随着科学技术的不断发展进步,智能控制的应用越来越广泛,几乎渗透到所有领域。
第五届全国大学生“飞思卡尔”杯智能汽车竞赛创意组竞赛说明
第五届全国大学生“飞思卡尔”杯智能汽车竞赛创意组竞赛说明一、 前言全国大学生智能汽车竞赛创意组比赛是在继前三届智能汽车竞速比赛之后,为了能够进一步提高大学生创新能力、丰富竞赛内容、提高竞赛水平而提出的创意竞赛。
第四届已经成功举办了一次创意比赛,从参赛的二十多项作品中评选出一、二等奖十名。
本届智能汽车竞赛将继续举办创意组比赛,经过遴选后的参赛作品将与智能汽车竞速比赛全国总决赛一起举行。
为了能够更加规范创意比赛的竞赛和评选,本届创意比赛采用统一硬件框架平台、限定作品主题的方法。
参赛队伍可以利用统一的硬件平台,在限定的主题范围内,制作参赛作品。
二、 参赛作品要求:1、 参赛作品的主体需要选用网站上公布的《全国大学生“飞思卡尔”杯智能汽车竞赛创新大赛套装》进行搭建。
平台示意图2、 作品的主题为“抗震救灾、绿色家园”。
3、 作品内容需要包括的基本的模块:a) 外部环境检测传感器与相应的信息处理模块;b) 运动机械装置与驱动控制模块,建议以各类模型车为基础;c) 嵌入式计算机信息处理模块;d) 电池与电源管理模块;e) 核心计算机处理模块必须使用飞思卡尔公司的处理器芯片系列。
竞赛评比将由竞赛现场专家组通过现场观摩作品展示、参赛队员提问、现场观众投票等环节对于参赛作品评分并最终确定比赛名次。
三、 报名办法:1、2010年暑期之前在校具有正式学籍的全日制本科生及研究生均可以参加比赛。
每支参赛队由3名学生组成,其中至少包括2名本科生,带队老师1‐2名。
若由两名教师联合指导,这两名教师必须具有不同的一级学科研究背景。
报名学生可以是参加全国大学生智能汽车竞速比赛的同学。
2、每所学校限报一支队伍。
3、报名截止日期为2010年7月1日,智能汽车竞赛分赛区比赛结束为止。
4、参赛队直接向全国总决赛组委会报名。
杭州电子科技大学教务处 310037陈临强 139065198909 0571‐86915010clq@参赛队提交创意竞赛报名表格,见附件一。
智能小车电磁组技术报告
根据电磁学,我们知道在导线中通入变化的电流(如按正弦规律变化的电 流),则导线周围会产生变化的磁场,且磁场与电流的变化规律具有一致性。如 果在此磁场中置一由线圈组成的电感,则该电感上会产生感应电动势,且该感应 电动势的大小和通过线圈回路的磁通量的变化率成正比。 由于在导线周围不同位 置, 磁感应强度的大小和方向不同,所以不同位置上的电感产生的感应电动势也 应该是不同。据此,则可以确定电感的大致位置。 首先,由毕奥-萨伐尔定律知:通有稳 恒电流I长度为L的直导线周围会产生磁场, 距离导线距离为r处P点 2 I 0 的磁感应强度为: B sin d 1 4 r ( 0 4 107 N / A2 ) 由此得 B
4 硬件结构设计及实现
我们的硬件设计思路是在保证信号检测质量的基础上尽可能精简电路, 以提 高系统的可靠性以及整车的机械特性。系统简图如下:
4.1单片机
我们采用mc9s12xs128作为控制单元,它具有强大的功能,其内部不仅集成 了普通I/O口还有足够大的flash,强大的中断系统,具有输入捕捉功能、输出比 较功能及脉冲累加功能的计数器模块,A/D转换接口,脉宽调制模块,串行通信 接口等,此外其总线时钟频率可根据需要灵活设置,它还支持BDM在线调试。
校内“飞思卡尔”竞速小车
电 磁 组
参赛成员:08 季庚午(物理) 08 栾忠飞(电气) 09 郭鹏 (物理) 09 王丽颖(电气) 10 范乐鹏(电气)
指导老师:
小车指导团队
目录
1 摘要-----------------------------------------------------------------------2 2 系统完成功能-----------------------------------------------------------2 3 系统方案论证-----------------------------------------------------------2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告学校:南京理工大学队伍名称:南理工摄像头1队参赛队员:贾海鹏黄芳勤丁蕾带队教师:郭健吴益飞关于技术报告和研究论文使用授权的说明本人完全了解第四届全国大学生“飞思卡尔”杯智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:贾海鹏黄芳勤丁蕾带队教师签名:郭健吴益飞日期:2010.08.10目录摘要 (I)第一章引言 (1)1.1研究背景 (1)1.2智能汽车竞赛简介 (1)1.3 本文结构安排 (2)第二章智能汽车控制系统总体设计 (4)2.1 系统工作原理 (4)2.2 系统硬件结构 (4)2.3 系统软件结构 (5)2.4 本章小结 (4)第三章模型车机械设计说明 (7)3.1 赛车基本参数 (7)3.2 车模机械结构调整 (7)3.3 本章小结 (9)第四章智能汽车控制系统硬件电路设计 (10)4.1 硬件电路总体结构框图 (10)4.2 核心控制模块 (11)4.3 电源模块 (12)4.4 路径识别模块 (16)4.5 舵机驱动模块 (22)4.6 速度传感器 (23)4.7 本章小结 (25)第五章图像处理和算法设计 (26)5.1图像采集方案设计 (26)5.2图像预处理算法设计 (27)5.3赛道信息提取算法设计 (28)5.4 路况判断算法设计 (29)5.5 舵机控制算法设计 (29)5.6 电机控制算法设计 (29)5.7 本章小结 (30)第六章系统调试 (31)6.1 开发工具 (31)6.2 硬件调试 (33)6.3 本章小结 (36)参考文献 (I)附录一:控制系统核心代码 (I)附录二:模型车技术参数 (I)摘要本文介绍了队员们在准备第五届“飞思卡尔”杯智能车竞赛过程中设计的基于视觉引导的智能汽车控制系统。
智能车的车模采用大赛组委会统一提供的仿真车模,硬件平台采用带MC9S12DG128 处理器的S12 环境,软件平台为CodeWarrior IDE 开发环境。
文中介绍了智能车控制系统的软硬件结构和开发流程。
整个智能车系统的设计与实现包括了车模的机械结构调整、传感器电路的设计与信号的处理、控制算法和策略优化、系统调试等多个方面。
通过对比不同方案的优缺点,在保证提高智能赛车的行驶速度和可靠性,我们最终确定了现有的系统结构和各项控制参数。
关键字:智能车,视觉引导,图像处理,路径识别第一章引言1.1 研究背景1885年,德国工程师卡尔·本茨在曼海姆制造成世界上第一辆装有0.85马力汽油机的三轮车。
而几乎同时,德国工程师戈特利布·戴姆勒也成功研制成一辆公认的以内燃机为动力的四轮汽车,因其使用重量轻、转速快的汽油发动机做动力,可以说是现代意义上的汽车。
汽车从上世纪末诞生以来,已经走过了百年多的风风雨雨,从卡尔·本茨造出的第一辆汽车以每小时18公里的速度,跑到现在,竟然诞生了从速度为零到加速到100每小时公里只需要三秒多一点的超级跑车,汽车发展的速度是如此惊人!汽车已然已经从一种实验性的发明转变为关联产业最广、工业技术波及效果最大的综合性工业。
为了占领未来汽车市场,如今已有许多公司把各种先进技术和装备,如微型电子计算机、无线电通讯、卫星导航等技术、新设备和新方法、新材料广泛应用于汽车工业中,汽车正在走向自动化和电子化。
汽车作为现代人类的交通工具,改变了人们的生活方式,推动了社会经济的发展和人类文化的进步,成为社会不可缺少的交通工具。
随着汽车保有量的日益增加,汽车也带来诸如环境污染、能源消耗、交通安全等社会问题,其中汽车道路交通安全问题尤为突出,世界上每年道路交通事故死亡约120万人。
由于汽车事故不断出现,造成重大的社会危害,引起了世界各国的重视,汽车驾驶的安全问题已成为全球性的社会问题。
通常对车辆的操作实质上可视为对一个多输入、多输出、输入输出关系复杂多变、不确定多于干扰源的复杂非线性系统的控制过程。
驾驶员既要接受环境如道路、拥挤、方向、行人等的信息,还要感受汽车如车速、侧向偏移、横摆角速度等的信息,然后经过判断、分析和决策,并与自己的驾驶经验相比较,确定出应该做的操纵动作,最后由身体、手、脚等来完成操纵车辆的动作。
因此在整个驾驶过程中,驾驶员的人为因素占了很大的比重。
一旦出现驾驶员长时间驾车、疲劳驾驶、判断失误的情况,很容易造车交通事故。
第五届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告为了降低和避免交通事故的发生,提高汽车驾驶的安全性,很多发达国家已经开始关注自主驾驶智能车辆的研究,智能汽车已成为世界车辆工程领域研究的热点和汽车工业增长的新动力。
智能汽车是一种正在研制的新型高科技汽车,不需要人去驾驶,是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,它集中运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是典型的高科技综合体。
对智能汽车的深入研究,对于汽车行业的发展、交通事故的减少,以及道路交通的有效管理和一些未知领域的研究探索都具有非常重要的意义。
智能汽车的出现,除了能降低高发的交通事故,方便道路交通的管理,也给人类对未知世界的探索提供了便利。
如在沙漠、戈壁等条件恶劣的环境下,可利用无人驾驶汽车去探险,避免了人驾车去探险的危险;当然,在一些超出人类生理承受极限的环境下,如海底、其他宇宙星体等领域,智能汽车的优势更加明显,它可以代替人类完成人类不能亲自去完成的工作;在未来军事中,智能汽车的引入,对减少人员的伤亡,也有着不可小觑的意义。
1.2 智能汽车竞赛简介教育部为了加强大学生实践、创新能力和团队精神的培养,在已举办全国大学生数学建模、电子设计、机械设计和结构设计四大竞赛的基础上,决定委托教育部高等学校自动化专业教学指导分委员会主办每年一度的全国大学生智能汽车竞赛。
比赛由国家教育部高等学校自动化专业教学指导分委员会主办,飞思卡尔半导体公司协办。
智能汽车竞赛所使用的车模是一款带有差速器的后轮驱动模型车,由组委会统一提供。
比赛跑道为表面白色,中心有连续黑线作为引导线,黑线宽为25cm。
比赛规则限定了跑道宽度60cm和拐角最小半径50cm,赛道具体形状在比赛当天现场公布。
各参赛队伍在严格遵守比赛规则的条件下,在车模前面安装光电传感器或CCD,并设计了电机驱动、转向舵机控制以及控制算法,以简洁但功能完美为出发点,以稳定为首要条件,以追求在最短的时间内第一章引言跑完全程,并能检测赛道的起跑线。
比赛限制使用的传感器数量不得超过16个,总电容容量不得超过2000微法,电容最高充电电压不得超过电池电压。
这样,就提供了一个相同的比赛平台,使各个参赛队从检测和控制的角度来解决这个问题。
参赛队伍必须仔细研究车模的数学模型和控制方案,将车模的潜力尽可能多地发挥出来。
1.3 本文结构安排本文以第五届全国大学生智能汽车竞赛为背景,为了保证智能汽车能够具有迅捷的速度、远而清晰的前瞻以及较高的灵敏度与稳定性,从软硬件方面对系统进行了优化。
本文结构安排如下:第一章,引言。
第二章,智能汽车控制系统总体设计。
第三章,模型车机械设计说明。
第四章,智能汽车控制系统硬件电路设计。
第五章,图像处理和算法设计。
第六章,系统调试。
第二章智能汽车控制系统总体设计智能车系统的制作要求是能够自主识别路线,即在按规则专门设计的跑道上自动识别道路行驶,要求最快跑完全程而没有冲出跑道,要求智能小车运行又快又稳。
因此对于小车的控制系统来说稳定性和快速性是控制系统设计的两个重要指标。
2.1 系统工作原理根据需求分析,经过仔细研究,决定采用模块化设计。
智能汽车的硬件系统由核心控制模块(MCU)、电源管理模块、传感器模块、存储器模块、电机驱动模块、舵机驱动模块、人机接口模块、无线通讯模块和放电器模块组成。
智能车系统的工作原理示意图如图2.1所示:图2.1智能汽车系统工作原理示意图智能汽车系统通过视觉传感器来检测前方的赛道信息,并将赛道信息发送给单片机。
同时,通过编码器和加速度传感器构成的反馈渠道将车体的行驶速度及加速度信息传送给主控单片机。
根据所取得的赛道信息和车体当前的速度及加速度信息,主控单片机做出决策,并通过PWM信号控制直流电机和舵机进行相应动作,从而实现车体的转向控制和速度控制。
2.2 系统硬件结构智能车控制系统从硬件上分为电源模块、传感器模块、信号处理模块、直第二章智能汽车控制系统总体设计流电机驱动模块、转向伺服电机驱动模块和单片机模块。
系统总体结构如图2.2所示:图2.2智能汽车控制系统总体设计框图2.3 系统软件结构系统硬件位于底层,是整个系统的基础,系统软件结构则根据硬件和控制需求来制定。
系统基本的软件结构如图2.3所示。
第五届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告图2.3系统软件结构2.4 本章小结本章介绍了智能汽车控制系统的工作原理。
根据系统的需求简要给出了系统的总体设计方案,并划分了系统的几个模块,。
第三章模型车机械设计说明为了使车能够更稳定的高速运行,我们对这次比赛车模进行了系统的分析。
今年的车模精度不是很高,因此要尽量在规则允许范围内改造车模,提高车模整体精度是很必要的。
另外,我们在实际调试中发现,前轮的束角和主销倾角对车的高速运行下的稳定性影响很大。
高速运行下舵机的转动速度对车转向的灵活程度也起到了根本性的作用。
此外,由于摄像头是外加的传感器,良好的固定方案能最大限度发挥它的前瞻远,视野广的特点。
所以,在整车的机械结构方面我们进行了三方面改进:转向机构改进、摄像头设计安装和前轮束角调整。
3.1 赛车基本参数此次比赛所用赛车车模是由深圳博思公司提供的1/28仿真车模,具体车模数据如表3.1所示:表3.1车模参数赛车机械结构只使用竞赛提供车模的底盘部分及转向和驱动部分。
控制采用前轮转向,四轮驱动方案。
车模改装是我们的第一步工作,在严格遵守比赛规则对车模要求的前提下,车模进行重装和改装。
第五届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告图3.1车模整体外观图3.2车模机械结构调整3.2.1 摄像头的安装摄像头的安装位置应合适选取。
安装位置太低,会导致视域不够广阔,影响寻线的有效范围;安装位置太高,导引线会变得过窄而无法被检测到,而且赛车系统会因重心抬高而稳定性变差。
安装位置合适的一个标准是:在此位置的拍摄范围能满足控制的需要。
3.2.2前轮倾角调整前轮定位的作用是保障汽车直线行驶的稳定性,转向轻便和减少轮胎的磨损。
前轮是转向轮,它的安装位置由主销内倾、主销后倾、前轮外倾和前轮前束等4 个项目决定,反映了转向轮、主销和前轴等三者在车架上的位置关系。