仿真作业
计算机仿真技术作业二
计算机仿真技术作业二题目:带电容滤波的三相不控整流桥仿真姓名:班级:学号:计算机仿真技术作业二题目:带电容滤波的三相不控整流桥仿真利用simpowersystems建立三相不控整流桥的仿真模型。
输入三相电压源,线电压380V,50Hz,内阻0.001欧姆。
三相二极管整流桥可用“Universal Bridge”模块,二极管采用默认参数。
直流滤波电容3300μF,负载为电阻。
仿真时间0.3s。
注:前三项只考虑稳态情况,第四项注重启动过程。
1、直流电压与负载电阻的关系:分别仿真整流电路空载及负载电阻为10、1和0.1欧姆时的情况。
记录直流电压波形,根据仿真结果求出直流电压,并比较分析其与负载的关系。
2、电流波形与负载的关系:分别仿真负载电阻为10、1.67和0.5时的情况。
记录直流电流和a相交流电流,并分析规律。
3、平波电抗器的作用直流侧加1mH电感。
分别仿真轻载50欧姆和重载0.5欧姆时的情况,记录直流和交流电流波形,并计算交流电流的THD。
仿真同样负载条件下,未加平波电抗器的情况,并加以比较分析。
4、抑制充电电流的方法观察前述仿真中,启动时的直流电流大小,分析原因,提出解决方法并进行仿真验证。
注意事项:在使用simpowersystems模块后必须使用PowerGUI1、直流电压与负载电阻的关系:分别仿真整流电路空载及负载电阻为10、1和0.1欧姆时的情况。
记录直流电压波形,根据仿真结果求出直流电压,并比较分析其与负载的关系。
按照下图建立三相桥式不可控整流电路模型,在图中我接入了2个示波器,scope和scope1,其中scope测量交流侧线电压和直流电压,scope1测量交流侧电流和直流侧电流,除此之外,我还用mean value模块接入了display模块,其中mean value用来计算平均值,display可以实时显示输出的数据,所以可以直观的观察到直流电压的平均值。
对仿真模式进行设置,系统默认的仿真算法为ode45,但使用ode45仿真过慢,经过尝试,我将仿真算法改为ode23tb,使用变步长仿真,最大步长设置为1e-5,仿真时间为0.0~0.3s。
arena仿真案例作业
arena仿真案例作业Arena是一种仿真软件,用于模拟和分析复杂的系统。
它可以用于各种领域的仿真,如生产、物流、交通等。
本文将介绍一些使用Arena仿真的案例,以展示其在实际应用中的作用。
1. 生产线优化在一个制造工厂中,使用Arena仿真来优化生产线的布局和工序安排。
通过模拟不同的工艺流程和生产线配置,可以找到最佳的生产方案,以提高生产效率和减少生产成本。
2. 物流调度在一个物流中心中,使用Arena仿真来优化货物的调度和运输路线。
通过模拟不同的调度算法和路线规划策略,可以找到最优的货物分配方案,以提高物流效率和减少运输成本。
3. 供应链管理在一个供应链中,使用Arena仿真来优化供应商选择、库存管理和订单处理等环节。
通过模拟不同的供应链策略和管理方法,可以找到最佳的供应链配置方案,以提高供应链的可靠性和响应能力。
4. 客流分析在一个交通枢纽中,使用Arena仿真来分析客流量和人员流动。
通过模拟不同的交通规划和站点布局,可以找到最佳的交通方案,以提高交通效率和减少拥堵情况。
5. 医院排队在一个医院中,使用Arena仿真来优化患者的排队和就诊流程。
通过模拟不同的排队算法和就诊规则,可以找到最佳的医疗服务方案,以提高就诊效率和患者满意度。
6. 电力系统在一个电力系统中,使用Arena仿真来优化电力的调度和供应。
通过模拟不同的电力调度策略和供应方案,可以找到最佳的电力运营方案,以提高电力供应的可靠性和效率。
7. 金融风险管理在一个金融机构中,使用Arena仿真来分析和管理风险。
通过模拟不同的风险事件和投资策略,可以评估风险暴露和损失潜力,以制定最佳的风险管理方案。
8. 零售店铺布局在一个零售店铺中,使用Arena仿真来优化商品陈列和店员安排。
通过模拟不同的陈列方案和人员调度策略,可以找到最佳的店铺布局方案,以提高销售额和客户满意度。
9. 城市规划在一个城市中,使用Arena仿真来分析人口流动和资源分配。
仿真作业说明
仿真作业说明通信2班刘姗08120179仿真分三部分,程序放在三个不同的文件夹,分别是:哈夫曼编码、QPSK和汉明(7,4)码。
下面对这三部分仿真作简单说明。
一、哈夫曼编码实现对字符序列的哈夫曼编解码,并分析编码效率。
共有6个文件:Seq.txt:样本文本,字符序列,包括字母、数字等可显示字符。
Main.m:主文件,对样本文件进行哈夫曼编码和解码,计算熵、平均长度和编码效率。
输出相关数据。
Probmodel.m:概率函数,计算样本文件中出现的所有互异字符和其对应的频率。
Huffanlyze.m:分析函数,基于字符和频率对样本文本进行分析,计算熵和平均长度,构造一个参考字典,每一条目包括三部分内容:字符,频率和哈夫曼码。
Huffencode.m:编码函数,根据字典对源字符序列进行编码,生成0、1序列。
Huffdecode.m:解码函数,根据字典对编码后的1、0序列进行解码,恢复成字符序列。
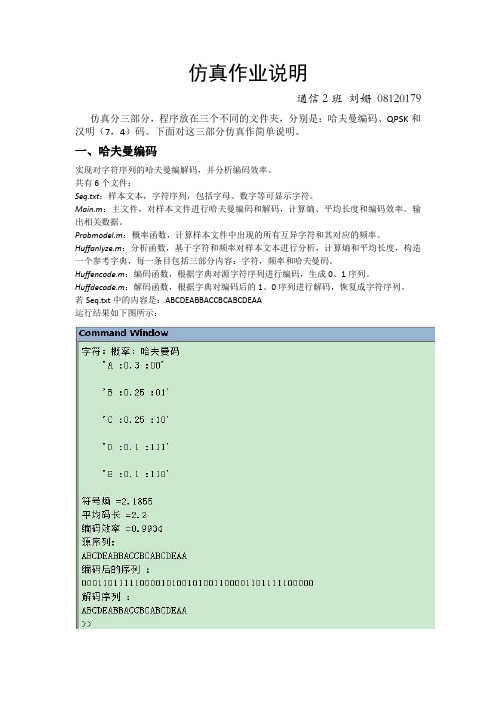
若Seq.txt中的内容是:ABCDEABBACCBCABCDEAA运行结果如下图所示:二、调制解调---QPSK该部分实现了两部分内容,仿真调制解调系统和分析在AWGN信道下的信噪比-误码率关系。
共有4个文件:Main.m:主文件,对输入的0、1码序列进行QPSK调制,在指定的信噪比下传输,采用最小均方误差准则进行判决。
比较输入和解码输出序列,绘出的曲线有输入信号时域波形和功率谱密度,信道输出信号时域波形和功率谱密度。
Performance.m:分析在AWGN信道下的信噪比-误码率关系。
绘出的曲线有仿真比特误码率、仿真符号误码率和理论比特误码率。
Pb_ps.m:误码率函数,在一定的信噪比下,计算10000个随机符号进行调制解调的比特误码率和符号误码率。
Gngs.m:高斯白噪声生成函数。
程序运行示意:性能分析三、信道编码---Hamming(7,4)实现Hamming(7,4)的编码和译码及分析其在高斯白噪声信道下的信噪比--误码率关系。
matlab电磁场仿真作业

matlab电磁场仿真作业一、介绍本文将介绍matlab电磁场仿真作业的相关知识和技巧。
电磁场仿真是指利用计算机模拟电磁场的分布和变化规律,以实现对电磁场问题的分析和解决。
matlab是一种强大的数学软件,可以用于各种科学计算、数据分析和图形处理等工作。
在电磁场仿真中,matlab具有良好的适用性和灵活性,可以方便地进行数据处理、可视化和模拟等操作。
二、基本概念1. 电磁场电磁场是指由带电粒子或导体所产生的物理现象,包括静电场、磁场和电磁波等。
在空间中,任何带有电荷或运动电荷的物体都会产生相应的电磁场。
2. 仿真仿真是指利用计算机模拟某个系统或过程的行为方式和结果。
在电磁场仿真中,可以通过建立数学模型来描述物理系统,并利用计算机进行计算和可视化。
3. 离散化离散化是指将连续变量转换为离散变量的过程。
在matlab中进行离散化操作可以将连续的电磁场分布转换为离散的数据点,以便进行计算和可视化。
三、matlab电磁场仿真的步骤1. 建立模型在进行电磁场仿真前,需要建立合适的模型来描述物理系统。
模型应该包括几何形状、物理特性和边界条件等信息。
可以使用matlab中的几何建模工具来创建三维模型,并定义相应的物理参数。
2. 离散化将连续的电磁场分布离散化为数据点。
可以使用matlab中的网格生成工具来生成离散化网格,并对网格进行调整以满足精度和计算效率要求。
3. 求解方程根据物理特性和边界条件,建立相应的方程组并求解。
常用的求解方法包括有限元法、有限差分法和边界元法等。
在matlab中,可以利用数值计算工具箱提供的函数来求解方程组。
4. 可视化将结果可视化以便于分析和展示。
可以使用matlab中强大的图形处理工具来生成二维或三维图像,并添加必要的标注和注释。
四、实例演示以下是一个简单的电磁场仿真实例,演示了如何在matlab中进行电磁场仿真。
1. 建立模型假设有一个长方体导体,其底面和侧面都被接地,导体顶部施加了一个电势差为V的电源。
MATLAB与控制系统仿真大作业
>> G1=tf(num,den);
>> G1=zpk(G1)
G1 =
5 (s+0.6) ----------------(s+3) (s+2) (s+1)
>> num=[2 1]; den=[1 2.9 1]; G2=tf(num,den); >> G2=zpk(G2)
G2 =
2 (s+0.5)
>> xlabel('x') ylabel('exp(-2.*x)')
三、simulink 建模(每题 10 分,共 20 分)
1、已知单位负反馈的开环传递函数为 G(s) =
2 s2 + 4s
,试利用
simulink
建立系在单位阶跃输入作用下的模型。
要求答案包括:(1)simulink 建模结构图;
(2)在同一个坐标中的阶跃信号和响应曲线图。
2、已知系统的开环传递函数为
G1(s)
=
2s2 + 5s + 6 s2 + 2s + 3
、G2 (s)
=
s2
s+6 + 7s +1
,H
(s)
=
5(s + 2) s +10
求:建立 Simulink 仿真模型,并求出其系统在单位阶跃响应;
要求答案包括:(1)simulink 建模结构图;
x=
-2.9709
0.5491
3.6000
0.0509
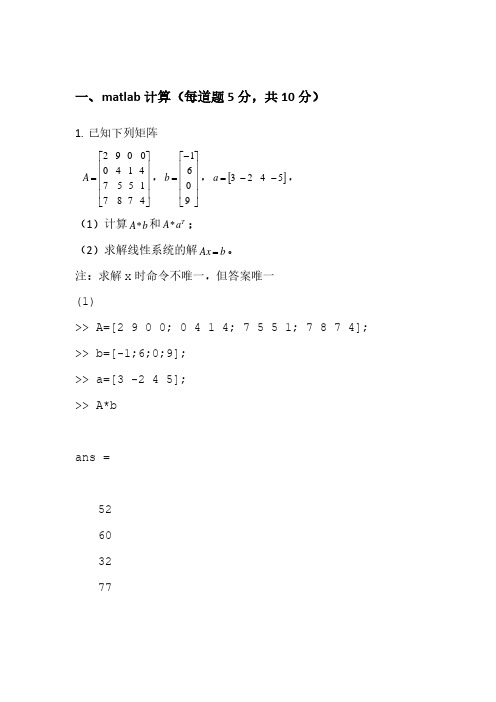
2. 已知下列矩阵
2 3 1
−1 3 5
A
=
VISSIM仿真作业
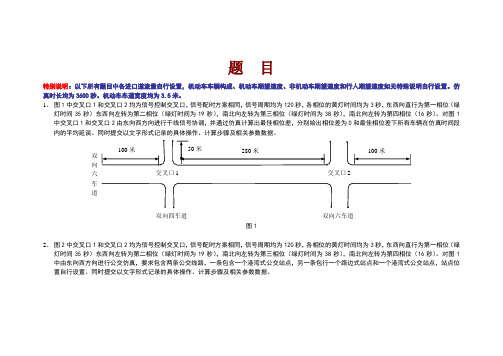
题目特别说明:以下所有题目中各进口道流量自行设置,机动车车辆构成、机动车期望速度、非机动车期望速度和行人期望速度如无特殊说明自行设置。
仿真时长均为3600秒。
机动车车道宽度均为3.5米。
1、图1中交叉口1和交叉口2均为信号控制交叉口,信号配时方案相同,信号周期均为120秒,各相位的黄灯时间均为3秒,东西向直行为第一相位(绿灯时间35秒)东西向左转为第二相位(绿灯时间为19秒),南北向左转为第三相位(绿灯时间为38秒),南北向左转为第四相位(16秒)。
对图1中交叉口1和交叉口2由东向西方向进行干线信号协调,并通过仿真计算出最佳相位差,分别给出相位差为0和最佳相位差下所有车辆在仿真时间段内的平均延误。
同时提交以文字形式记录的具体操作、计算步骤及相关参数数据。
双向六车道双向四车道双向六车道交叉口1 交叉口2图12、图2中交叉口1和交叉口2均为信号控制交叉口,信号配时方案相同,信号周期均为120秒,各相位的黄灯时间均为3秒,东西向直行为第一相位(绿灯时间35秒)东西向左转为第二相位(绿灯时间为19秒),南北向左转为第三相位(绿灯时间为38秒),南北向左转为第四相位(16秒)。
对图1中由东向西方向进行公交仿真,要求包含两条公交线路,一条包含一个港湾式公交站点,另一条包行一个路边式站点和一个港湾式公交站点,站点位置自行设置。
同时提交以文字形式记录的具体操作、计算步骤及相关参数数据。
双向六车道双向六车道双向四车道交叉口1交叉口2图23、 图3中交叉口1和交叉口2均为无信号控制交叉口,根据课件中无信号控制十字交叉口的让行规则进行仿真。
同时提交以文字形式记录的具体操作、计算步骤及相关参数数据。
双向六车道双向四车道双向四车道交叉口1交叉口2主路 次路 次路 图34、 图4中交叉口1和交叉口2均为无信号控制交叉口,根据课件中无信号控制交叉口的让行规则进行仿真。
同时提交以文字形式记录的具体操作、计算步骤及相关参数数据。
ANSYS仿真分析作业

ANSYS仿真分析作业ANSYS仿真分析是一种基于计算机辅助工程软件的分析方法,能够对复杂的工程问题进行模拟和评估,帮助提高工程设计的效率和可靠性。
本文将以ANSYS仿真分析作业为主题,就其基本概念、应用领域和优势进行1200字以上的阐述。
ANSYS仿真分析是一种基于有限元方法的数值计算技术,能够对各种物理现象进行分析,如结构力学、流体力学、电磁场、热传导等。
它通过将复杂问题离散为大量小单元,然后使用数学方法进行计算,最终得出近似解。
ANSYS软件具有强大的计算能力和丰富的分析工具,可以有效地模拟复杂的工程问题,并提供详细的结果和分析。
ANSYS仿真分析在各个领域都有广泛的应用。
在机械工程中,可以用于强度、刚度和振动等问题的分析,通过对零件和装配体进行分析,确定其可靠性和寿命。
在航空航天领域,可以模拟飞行器的飞行和结构载荷,优化设计并改进性能。
在汽车工程中,可以对汽车结构进行仿真分析,提高安全性和节能性能。
ANSYS仿真分析具有以下几个方面的优势。
首先,它可以帮助工程师在设计阶段就发现问题并作出改进,减少了实际测试的需求,从而节约了时间和成本。
其次,仿真分析具有高度的可重复性,不受人为误差的影响,可以反复进行测试和优化。
此外,它还可以模拟复杂的物理场景,如流体动力学中的湍流和多相流等,提供更真实的结果。
最后,ANSYS仿真分析还可以进行多物理场耦合分析,将不同场量的耦合引入分析模型中,实现更全面的分析。
然而,ANSYS仿真分析也存在一些限制。
首先,它的准确性和可靠性受到数值计算和材料模型的限制,需要进行合理的假设和边界条件的选择。
其次,并非所有工程问题都适合使用ANSYS仿真分析,有些问题需要其他方法的辅助分析。
此外,ANSYS仿真分析的使用需要一定的专业知识和技能,需要工程师具备一定的模拟分析经验。
综上所述,ANSYS仿真分析作为一种基于有限元方法的计算技术,在工程领域具有重要的应用价值。
通过模拟和评估复杂的工程问题,可以提高工程设计的效率和可靠性,节约时间和成本。
第二章multisim仿真作业
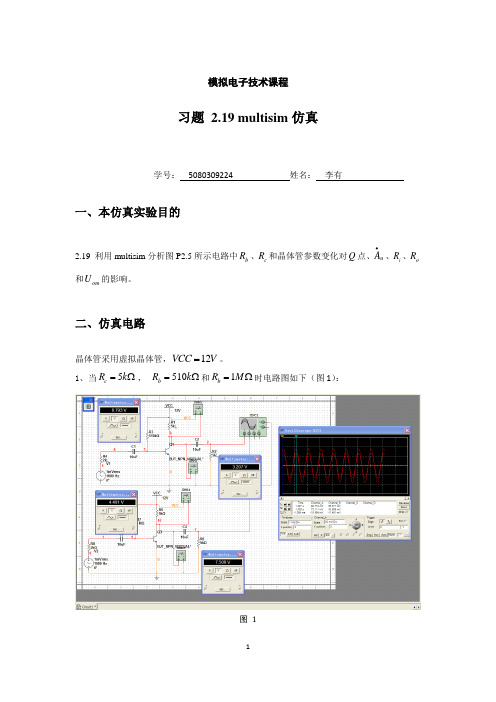
模拟电子技术课程习题 2.19 multisim 仿真学号: 5080309224 姓名: 李有一、本仿真实验目的2.19 利用multisim 分析图P2.5所示电路中b R 、c R 和晶体管参数变化对Q 点、u A •、i R 、o R 和om U 的影响。
二、仿真电路晶体管采用虚拟晶体管,12VCC V =。
1、当5c R k =Ω, 510b R k =Ω和1b R M =Ω时电路图如下(图1):图 12、当510b R k =Ω,5c R k =Ω和10c R k =Ω时电路图如下(图2)图 23、当1b R M =Ω时, 5c R k =Ω和10c R k =Ω时的电路图如下(图3)图 34、当510b R k =Ω,5c R k =Ω时,β=80,和β=100时的电路图如下(图4)图 4三、仿真内容1. 当5c R k =Ω时,分别测量510b R k =Ω和1b R M =Ω时的CEQ U 和u A •。
由于输出电压很小,为1mV ,输出电压不失真,故可从万用表直流电压(为平均值)档读出静态管压降CEQ U 。
从示波器可读出输出电压的峰值。
2. 当510b R k =Ω时,分别测量5c R k =Ω和10c R k =Ω时的CEQ U 和u A •。
3. 当1b R M =Ω时,分别测量5c R k =Ω和10c R k =Ω时的CEQ U 和u A •。
4. 当510b R k =Ω,5c R k =Ω时,分别测量β=80,和β=100时的CEQ U 和u A •。
四、仿真结果1、当5c R k =Ω,510b R k =Ω和1b R M =Ω时的CEQ U 和u A •仿真结果如下表(表1 仿真数据)表格 1 仿真数据2、当510b R k =Ω时, 5c R k =Ω和10c R k =Ω时的CEQ U 和u A •仿真结果如下表(表2 仿真数据)表格 2 仿真数据3、当1b R M =Ω时, 5c R k =Ω和10c R k =Ω时的CEQ U 和u A •仿真结果如下表(表3 仿真数据)表格 3 仿真数据4、当510b R k =Ω,5c R k =Ω时,分别测量β=80,和β=100时的CEQ U 和u A •的仿真结果如下表(表4 仿真数据)。
计算机仿真作业

实验作业土规1101班刘迈克 2011206200521计算机仿真1、(射击命中率) 在我方某前沿防守地域,敌人以一个炮排(含两门火炮)为单位对我方进行干扰和破坏.为躲避我方打击,敌方对其阵地进行了伪装并经常变换射击地点.经过长期观察发现,我方指挥所对敌方目标的指示有50%是准确的,而我方火力单位,在指示正确时,有1/3的射击效果能毁伤敌人一门火炮,有1/6的射击效果能全部消灭敌人.现模拟我方将要对敌人实施的20次打击结果,并确定有效射击的比率及毁伤敌方火炮的平均值。
解:一、问题分析首先是两种情况:(1)我方指挥所对敌方目标的指示正确与否。
有两种结果,每一种结果出现的概率都是1/2。
(2)指示正确时有三种结果:模拟试验有三种结果:毁伤一门火炮的可能性为1/3(即2/6),毁伤两门的可能性为1/6,没能毁伤敌火炮的可能性为1/2(即3/6).根据题意,20次打击可以认为有10次是目标准确的,且是随机的,可以生成(0,1)0.5,5/6),全部消灭敌人的范围是(5/6,1)二、程序:a=0;b=0;e1=0; %表示有效射击的比率e2=0; %表示毁伤敌人火炮的平均值r=rand(1,10);for i=1:10if r(i)<0.5n(i)=0;elseif r(i)>0.5&r(i)<5/6n(i)=1;a=a+1;elseif n(i)=2;b=b+1;end;end;rne1=(a+b)/20e2=(a+2b)/20三、结果及分析结果 r =Columns 1 through 80.4505 0.0838 0.2290 0.9133 0.1524 0.8258 0.5383 0.9961Columns 9 through 100.0782 0.4427n =0 0 0 2 0 1 1 2 0 0e1 =0.2000e2 =0.1000有效射击比率为e1=0.2,毁伤敌人火炮的平均值为0.1.十次击中的结果为0 0 0 2 0 1 1 2 0 0,20次打击的结果可以为2 0 1 0 0 0 2 0 1 0 0 0 0 0 0。
电子系统仿真12级作业(第一次)

x 1 11
21
31
41
51
61
71
81
91
101
0 1.0414 1.3222 1.4914 1.6128 1.7076 1.7853 1.8513 1.9085 1.9590 2.0043
lg x
解:实验程序:
运行结果:
13、1 行 100 列的 Fibonacc 数组 a,a(1)=a(2)=1,a(i)=a(i-1)+a(i-2),用 for 循环指令来寻求该数组中第一个大于 10000 的元素,并指出其位置 i。
⎪ ⎪⎩0.5457e
−0.75
x22
−3.75
x12
+1.5
x1
,
解:MTALBA 程序及结果图如下:
x1 + x2 > 1 −1 < x1 + x2 ≤ 1 x1 + x2 ≤ −1
15.已知
⎧ ⎪
f1
=
1,
n =1
⎪⎪ f2 = 0, ⎨
n=2 求 f1 ~ f100 中,最大值,最小值,各数之和,
温度(℃)。
解:MTALBA 程序及结果图如下: 实验程序:
运行结果:
12.已知 lg x 在[1,101]区间 10 个整数采样点的函数值见表 4.2。试
求 lg x 的 5 次拟合多项式 p(x) ,并绘制出 lg x 和 p(x) 在[1.101]区间的
函数曲线。
表 4.2 lg x 在 10 个采样点的函数值
(℃)见表 4.1。
表 4.1 室内外温度观测结果
时间 6
10
12
14
16
18
计算机仿真大作业
武汉理工大学(《计算机仿真技术》课程大作业)风力发电系统中增速器的三维建模与仿真试验研究学院(系):物流工程学院专业班级:机械制造研1110班学生姓名:原志磊指导教师:杨艳芳目录摘要 (1)ABSTRACT (2)1 增速器的三维建模与虚拟装配 (3)1.1 零件的三维设计 (3)1.2 虚拟装配 (6)1.2.1 虚拟装配的概论 (6)1.2.2 虚拟装配定义及特点 (7)1.2.3 装配信息及装配关系 (7)1.2.4 基于物理属性的虚拟装配 (9)2 增速器的静力学分析 (17)2.1 静力学分析简介 (17)2.2 接触分析理论 (19)2.3第一级行星轮系静力学分析 (21)2.3.1 建立有限元模型 (22)2.3.2 建立接触对 (23)2.3.3 施加有限元模型的约束和载荷 (24)2.3.4 选择分析类型并设置分析选项 (26)2.3.5 求解 (26)2.3.6 查看分析结果接触分析的结果 (27)3 总结与展望 (30)3.1 工作总结 (30)3.2 工作展望 (30)参考文献 (32)摘要本文首先借助SolidWorks三维建模软件对1500KW风力发电机增速器进行了三维建模并完成虚拟装配,随后借助有限元分析软件ANSYS对增速器的重要零部件进行特性分析。
通过分析结果与理论计算值进行比较,所得结果对于改进设计方法,实现提高增速器各项性能具有重要的指导意义。
论文主要研究了增速器的第一级行星轮系,通过将建立的模型导入有限元分析软件ANSYS中,计算应力。
研究结果表明:在ANSYS中计算出的最大应力值小于理论计算的最大应力值,计算结果满足材料的许用接触应力要求。
本文的特色在于:利用现有的软件对增速器的工作进行了模拟和分析。
对接触分析进行深入研究。
关键词:风力发电机;增速器;建模;虚拟装配;ANSYSAbstractThis paper first completes modeling and virtual assembly of 1500KW wind generator speeder by using SolidWorks, a three-dimensional modeling software.Then analysis the important components of the speeder by ANSYS,a finite element analysis software . The analysis results compares to the theoretical calculated. It is important to improve the design method ,and it has an important significance to achieve to improve the performance of speeder.This paper mainly studies the first grade planetary gear system. The model will be imported in ANSYS to calculate the stress and get the natural frequencies and mode shapes by modal analysis.The results show that the maximum stress calculated in ANSYS is less than the maximum stress calculated in theoretical,so it satisfies the material requirements of the contact stress allowable.In this paper the feature is that the working of speeder was simulated and analyzed by using the existing softwares. It’s in-depth study of the contact analysis.Key Words:wind generator;speeder;modeling;virtual assembly;ANSYS1 增速器的三维建模与虚拟装配1.1 零件的三维设计随着信息技术在各个领域的迅速渗透,CAD/CAM/CAE技术已经得到了广泛的应用,从根本上改变了传统的设计、生产、组织模式,对推动现有企业的技术改造、带动整个产业结构的变革、发展新兴技术、促进经济增长都具有十分重要的意义。
电子电路仿真与测试作业指导书

电子电路仿真与测试作业指导书一、实验目的本次实验旨在通过电子电路仿真与测试,掌握电路仿真软件的基本操作方法,了解电路模拟与测试的原理和过程,培养分析和解决电路问题的能力。
二、实验工具与材料1. 电子电路仿真软件(例如Proteus、PSpice等)2. 计算机3. 相关电路元件(例如电阻、电容、电感等)4. 万用表5. 示波器三、实验内容1. 电路仿真1.1 搭建电路原理图根据实验要求,使用电子电路仿真软件搭建相应的电路原理图。
1.2 设置元件参数按照实验要求,设置各元件的参数,包括电阻、电容、电感、信号源频率等。
1.3 运行仿真运行仿真程序,验证电路的工作状态和性能。
观察电压、电流波形,检查电路是否符合预期。
2. 电路测试2.1 准备测试仪器连接电路所需的测试仪器,包括万用表和示波器。
确保测试仪器的工作状态正常。
2.2 测试电路参数根据实验要求,使用万用表测量电路参数,如电压、电流、电阻等。
记录测量结果。
2.3 分析测试结果根据测试结果,比较实际数值与理论计算值的差异。
分析产生差异的原因,并提出改进电路的建议。
四、实验步骤1. 电路仿真步骤1.1 打开电子电路仿真软件,并创建新的仿真项目。
1.2 从元器件库中选择所需元件,拖拽到电路原理图中。
1.3 连接各元件,建立电路拓扑结构。
1.4 设置元件参数,如电阻值、电容值等。
1.5 设置信号源参数,如频率、幅值等。
1.6 运行仿真,观察电路的工作状态和性能。
2. 电路测试步骤2.1 连接电路测试所需的仪器,如万用表和示波器。
2.2 设置测试仪器的测量模式和范围。
2.3 测量电路参数,如电压、电流、电阻等。
2.4 记录测量结果,并进行比较和分析。
五、实验注意事项1. 在进行电路仿真和测试前,确保所使用的元器件符合实验要求,并检查测试仪器的工作状态是否正常。
2. 在进行电路仿真时,注意设置正确的元件参数和信号源参数,以确保仿真结果的准确性。
3. 在进行电路测试时,遵循安全操作规程,切勿触摸带电部分,避免发生触电事故。
编组站自动化驼峰作业过程模拟仿真

编组站自动化驼峰作业过程模拟仿真站自动化驼峰作业是指将多个运筹作业打包集中在一个周期内完成的作业方式。
这种作业方式可以提高作业效率,减少运输时间和物流成本。
在实际应用中,为了尽可能提高作业效率,很多企业采用了自动化驼峰作业系统。
本文将对站自动化驼峰作业过程进行模拟仿真,以探究其在实际应用中的效果。
首先,我们需要建立一个仿真模型。
该模型包括站的布局、设备的配置以及运输规划等。
为了简化问题,我们假设只有一个站点和一条运输线路。
站点由若干个作业区域组成,每个作业区域都配备有自动化设备,如输送带、机械臂等。
运输线路上可以同时行驶多个运输车辆。
在模拟仿真过程中,我们需要考虑以下几个因素:1.作业区域的选择和分配:根据实际需求和运输线路的情况,选择最佳的作业区域并进行合理的分配。
在模拟仿真中,我们可以采用随机数生成器来模拟这个过程。
2.运输车辆的控制和调度:根据作业区域的选择和分配,确定每个运输车辆的载货量和作业路径。
在模拟仿真中,我们可以使用算法来优化运输车辆的调度方案,以最大化作业效率。
3.作业过程的模拟和评估:通过模拟仿真,我们可以观察到每个作业区域的作业状态和设备的运行情况。
同时,我们还可以通过设置指标来评估作业效果,如作业周期、作业量、运输时间等。
通过以上步骤,我们可以得到一个较为完整的站自动化驼峰作业过程模拟仿真结果。
在实际应用中,这个模拟结果可以用作参考,帮助企业优化站自动化驼峰作业系统的配置和调度策略。
总结起来,站自动化驼峰作业过程模拟仿真是一种有效的工具,可以帮助企业优化作业效率。
通过建立仿真模型,我们可以模拟和评估不同的作业方案,从而选择最佳的方案。
这有助于提高作业效率、减少运输时间和物流成本。
同时,站自动化驼峰作业过程模拟仿真还可以为企业提供决策支持,帮助其进行合理的投资和资源配置。
通信信号处理仿真大作业
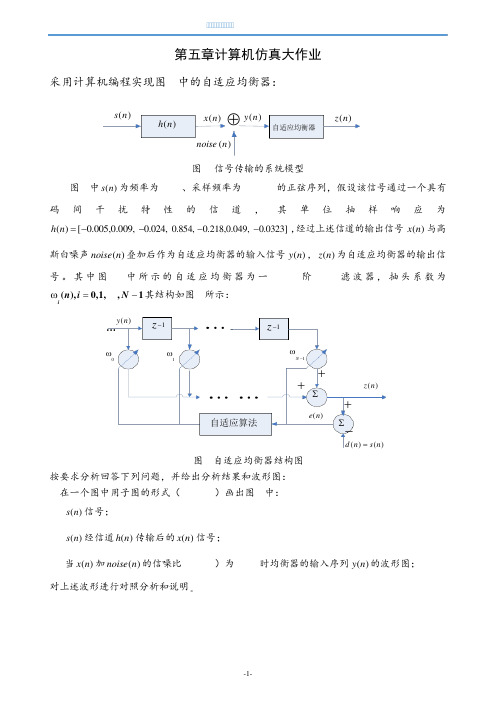
第五章计算机仿真大作业采用计算机编程实现图1中的自适应均衡器:()h n ()s n ()x n ⊕()noise n ()y n 自适应均衡器()z n图1 信号传输的系统模型图1中()s n 为频率为10Hz 、采样频率为1000Hz 的正弦序列,假设该信号通过一个具有码间干扰特性的信道,其单位抽样响应为()[0.005,0.009,0.024,h n =--0.854,0.218,0.049,0.0323]--,经过上述信道的输出信号()x n 与高斯白噪声()noise n 叠加后作为自适应均衡器的输入信号()y n ,()z n 为自适应均衡器的输出信号。
其中图1中所示的自适应均衡器为一N=31阶FIR 滤波器,抽头系数为(),0,1,,1in i N ω=-其结构如图2所示: 1z -()y n 0ω1ω∑∑++()()d n s n =+-()z n ()e n 1z -1N ω-自适应算法图2自适应均衡器结构图按要求分析回答下列问题,并给出分析结果和波形图: 1.在一个图中用子图的形式(subplot )画出图1中: (1)()s n 信号;(2)()s n 经信道()h n 传输后的()x n 信号;(3)当()x n 加()noise n 的信噪比SNR(dB )为20dB 时均衡器的输入序列()y n 的波形图; 对上述波形进行对照分析和说明。
01002003004005006007008009001000-101正弦信号s(n)01002003004005006007008009001000-101x(n)序列1002003004005006007008009001000-101y(n)序列分析说明:s(n)通过具有码间干扰特性的信道h(n),由于信道存在一定的误差和码间干扰使系统的性能下降,x(n)的波形密度减小了,但整体波形没有发生变化。
加入噪声后,y (n )的幅值没有变化,但整个波形由于受到噪声干扰浮现“毛刺”现象,波形不在平滑。
智能控制模糊控制仿真大作业
智能控制模糊控制仿真大作业一、前言智能控制模糊控制仿真大作业是在智能控制课程中的一项重要任务,旨在让学生通过实践来深入理解模糊控制的原理和应用。
本文将从以下几个方面详细介绍智能控制模糊控制仿真大作业的相关内容。
二、作业背景智能控制是一种基于人工智能技术的自动化控制方法,它可以通过对系统进行学习和优化来提高系统的性能和鲁棒性。
而模糊控制则是智能控制中的一种重要方法,它可以通过对输入输出之间的关系进行建模来实现对系统的控制。
因此,深入了解模糊控制的原理和应用对于学习智能控制具有重要意义。
三、作业要求本次大作业要求学生使用MATLAB/Simulink软件来设计一个基于模糊逻辑的温度调节系统,并进行仿真验证。
具体要求如下:1. 设计一个基于PID算法和模糊逻辑的温度调节系统;2. 利用Simulink软件构建该系统,并进行仿真验证;3. 对比分析PID算法和模糊逻辑在温度调节系统中的控制效果;4. 撰写实验报告,详细介绍设计思路、仿真结果以及分析结论。
四、作业流程1. 确定系统需求和参数首先,需要确定温度调节系统的需求和参数。
例如,设定目标温度为25摄氏度,系统初始温度为20摄氏度,采样时间为0.1秒等。
2. 设计PID控制器接下来,设计PID控制器。
PID控制器是一种经典的控制方法,在工业自动化控制中得到广泛应用。
其基本原理是通过对误差信号、误差积分和误差微分进行加权组合来得到输出信号。
3. 设计模糊逻辑控制器然后,设计模糊逻辑控制器。
模糊逻辑控制器是一种基于模糊集合和模糊推理的控制方法。
其基本原理是将输入变量映射到一个或多个模糊集合上,并通过一系列规则来推导出输出变量的值。
4. 构建Simulink模型并进行仿真验证接下来,利用Simulink软件构建温度调节系统,并将PID控制器和模糊逻辑控制器分别加入到系统中。
然后,进行仿真验证,比较两种控制方法的控制效果。
5. 分析结果并撰写实验报告最后,对比分析PID算法和模糊逻辑在温度调节系统中的控制效果,并撰写实验报告,详细介绍设计思路、仿真结果以及分析结论。
15道SIM仿真作业

仿真作业题1.用接在I0.0输入端的光电开关检测传送带上通过的产品,有产品通过时I0.0为ON,如果在10S内没有产品通过,由Q0.0发出报警信号,用I0.1输入端外接的开关解除报警信号。
画出梯形图,并写出对应的语句表程序。
2. 用S、R和跳变指令设计满足下图所示波形的梯形图。
3. 在按钮I0.0按下后Q0.0变为1状态并自保持(见下图),I0.1输入3个脉冲后(用加计数器Cl计数),T37开始定时,5S后QO.0变为0状态,同时Cl被复位,在PLC刚开始执行用户程序时,Cl也被复位,设计出梯形图。
4. 试设计满足下图所示波形的梯形图。
5. 试设计满足下图所示波形的梯形图。
6 利用1ms 定时器,设计定时为50秒输出的控制程序。
7. 设计一个30H+40min的长延时电路程序。
8。
使用定时器指令编一个对可编程序控制器输入输出模板各输入点和输出点正常与否的检查程序。
要求输入点I0.0—I0.7分别为ON时,Q0.0—Q0.7同时以周期为3秒,占空比为2:1的连续方波信号输出。
9。
使用定时器指令,按以下时序图编写出相应的梯形图程序,对输出模板进行检查。
10。
设某件加工过程分为四道工序,共需10秒完成,具体过程如下图时序图所示,请按加工过程要求编写出相应的梯形图程序。
11。
使用计数器C指令编制一个梯形图程序,当从I0.0输入三个脉冲信号后,Q0.0—Q0.7同时为ON, 再从I0.0输入四个脉冲信号后, 梯形图程序以2秒时间间隔顺序把Q0.0—Q0.7变为OFF,以后过程同前所述循环执行。
12.用计数器C代替计时器实现以下图加工工序要求。
13.试编制一个梯形图程序,统计进楼,出楼人数。
示意图如图I0.0 = A 传感器 I0.1 = B 传感器Q0.0—Q0.2 :指示进楼人数量(0—7人);满7人时,Q0.3指示灯亮。
Q0.4—Q0.6 :指示出楼人数量(0—7人);满7人时,Q0.7指示灯亮。
14.编制两台电机的顺序控制。
作业现场虚拟仿真训练

作业现场虚拟仿真训练:提高工作效率、降低风险的最新趋势作为一种新兴的培训方式,虚拟仿真训练在生产制造、建筑工程、医疗行业等各个领域得到了广泛应用。
在这些领域中,尤其受到重视。
这种训练方式通过真实场景的模拟,使学员在虚拟环境中进行实践,充分锻炼技能,提高操作效率,并在保证安全的前提下降低风险。
当然,的应用不仅仅局限于实践操作,它还可以帮助人们更好地了解作业现场的环境和流程,增加对作业对象的认识和理解,有利于形成正确的作业方法和思路,提高工作质量。
如何进行在进行时,首先需要进行场景建模。
这需要使用专业的3D建模软件进行模型设计,并将场景中各个元素进行定位和组合,以呈现出具有真实感的场景。
建模完成后,需要使用虚拟现实技术进行模拟呈现。
一些先进的仿真软件和虚拟现实设备可帮助学员具体感受到操作时的体验,并实时反馈偏差、危险因素等情况,提醒学员改正错误。
为了达到更好的效果,模拟可以在不同的条件下进行。
例如,可以将虚拟模型放置在多种不同的场景中,考虑到各种不同的情况和氛围。
这使得学员们可以真正学会在压力下、有障碍和限制的情况下运用所需技能。
不仅如此,还可以结合人工智能技术,针对学员的表现进行实时监测和评估,为下一次训练提供准确的反馈和改进。
优点和应用领域有许多优点。
首先,它可以有效地提高培训和工作效率。
与传统的培训方式相比,虚拟仿真训练将大幅度减少人力和物力资源的消耗,避免对现场操作的影响,大大提高了培训和工作的效率。
其次,它可以降低风险。
实际操作中,承担各种风险的成本很高,并且在训练中出现重大失误可能会导致更高的成本。
通过虚拟仿真训练,可以降低因操作失误而引起的人员伤亡和设备损坏的风险。
最后,它可以适用于多种应用领域。
除了生产制造、建筑工程、医疗行业外,还可以在军事、航空、汽车制造等领域得到广泛应用。
这种训练方式具有高度的可定制性,可以根据不同领域的需求进行各种调整和优化。
结语随着技术的不断革新和进步,将成为一个越来越重要的工具。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
专题一取样与恢复
一.混叠研究
采样为理想采样,xa=exp(-1000*abs|t|),t的单位为毫秒。
1.绘制时域波形和频谱图(傅里叶变换)。
程序如下:
dt=0.00005;t= -0.005:dt:0.005
xa=exp(-1000*abs(t));
ts=0.0001;n=-20:1:20;
x=exp(-1000*abs(n*ts));
K=500;k=-250:1:250;
Wmax=2*pi*2000;W=k*Wmax/K;Xa=xa*exp(-j*t'*W)*dt;Xa=real(Xa);
W=[-fliplr(W),W(1,500)];
Xa=[fliplr(Xa),Xa(1,500)];
figure(1)
subplot(2,1,1);plot(t*1000,xa,'.');xlabel('t');ylabel('xa(t)');title( '模拟信号');
subplot(2,1,2);plot(W/(2*pi*1000),Xa*1000,'.');xlabel('frequence in KHz');ylabel('Xa(jw)*1000');title('模拟信号的傅里叶变换');
2.(1)Fs=5000样本每秒采样xa(t)得出x1(n),并画出x1(n)及X1(exp(jw))程序如下:
W=pi*k/K;
X=x*exp(-j*n'*W);X=real(X);
W=[-fliplr(W),W(1,500)];
X=[fliplr(X),X(1,500)];
figure(2);
subplot(2,1,1);stem(n*ts*1000,x,'.');ylabel('x1(n)');title('离散时间x1(n)');
subplot(2,1,2);plot(W/pi,X,'.');ylabel('X(exp(jw))');
title('Fs=5000Hz时的离散时间傅里叶变换');
2(2)Fs=1000样本每秒时的采样和频谱图:
程序如下:
ts=0.001;n=-25:1:25;
x=exp(-1000*abs(n*ts));
K=500;k=-250:1:250;
W=pi*k/K;
X=x*exp(-j*n'*W);X=real(X);
W=[-fliplr(W),W(2:K+1)];
X=[fliplr(X),X(2:K+1)];
figure(3);
subplot(2,1,1);plot(t*1000,xa);stem(n*ts*1000,x,'.');axis([-5 5 0 1]);ylabel('x2(n)');title('离散时间x2(n)');
subplot(2,1,2);plot(W/pi,X,'.');ylabel('X2(exp(jw))');
title('Fs=1000Hz时的离散时间傅里叶变换');
二.非带限信号的取样
f=-3:0.001:3;
f0=0.5;
a=0.2;
fs1=1;
fs2=2;
T1=1/fs1;
T2=1/fs2;
Xfa=10*log((a*a+(2*pi*(f-f0)).^2').^(-1)');
Xfs1=10*log((1-2*exp(-a*T1)*cos(2*pi*(f-f0)*T1)+exp(-2*a*T1)).^(-1)'); Xfs2=10*log(0.25*(1-2*exp(-a*T2)*cos(2*pi*(f-f0)*T2)+exp(-
2*a*T2)).^(-1)');
figure
plot(f,Xfa,'k:',f,Xfs1,'k--',f,Xfs2,'k');
axis([-3,3,-60,60]);
f=-3:0.001:3;
f0=0.5;
a=0.2;
fs=2;
T=1/fs;
L=2;
Xfa=10*log(abs((a*a+(2*pi*(f-f0)).^2').^(-1)'));
Xfs=10*log(0.25*(1-2*exp(-a*T)*cos(2*pi*(f-f0)*T)+exp(-2*a*T)).^(-1)');
XLf=10*log(0.25*(1-2*exp(-a*T*L)*cos(2*pi*(f-f0)*T*L)+exp(-
2*a*T*L)))-10*log((1-2*exp(-a*T)*cos(2*pi*(f-f0)*T)+exp(-2*a*T))); figure
plot(f,XLf,'k',f,Xfs,'k:',f,Xfa,'k--');
legend('windowed','fs=2Hz','analog');
axis([-3,3,-60,60]);
xlabel('f/Hz,L=2');
ylabel('dB');。