RS-485总线和MODBUS—RTU协议的阀门测试系统
实验5——485总线及Modbus通讯协议实验

课程名称:嵌入式软件技术开课机房:11号机房2012年4月24日星期二8:10~11:35一、实验任务与实验目的二、报告内容Freemodbus是modbus协议在嵌入式处理器上的实现。
包括AVR,PIC,WIN32等等平台。
它是开放性源代码,可用于商业目的。
它实现了Modbus RTU/ASCII、TCP三种传输方式,当前版本是1.5,支持以下功能:∙读输入寄存器(0x04)∙读保持寄存器(0x03)∙写单个寄存器(0x06)∙写多个寄存器(0x10)∙读/写多个寄存器(0x17)∙读取线圈状态(0x01)∙写单个线圈(0x05)∙写多个线圈(0x0F)∙读输入状态(0x02)∙报告从机标识(0x11)本实现基于最新的标准并且与标准完全兼容。
接收和传输Modbus RTU/ASCII数据帧是通过一个由硬件提取层的调用来驱动状态机实现的。
这就使得协议非常容易移植到其他的平台之上。
当接收一个完整的数据帧后,该数据帧被传入Modbus应用层,数据帧的内容在该层内得到解析。
为方便地增加新的Modbus功能,Freemodbus在应用层提供了钩子函数Hooks。
如果用到了Modbus TCP协议,那么当准备处理一个新数据帧的时候,移植层就必须首先向协议层发送一个事件标志。
然后,协议栈调用一个返回值为接收到的Modbus TCP数据帧的函数,并且开始处理这个数据帧。
如果数据有效,则响应的Modbus反馈帧将提供给移植层生成反馈帧。
最后,该反馈帧被发送到客户端。
二、实现FreeModbus协议所需要的软/硬件需求Modbus协议对硬件的需求非常少——基本上任何具有串行接口,并且有一些能够容纳modbus 数据帧的RAM的微控制器都足够了。
∙一个异步串行接口,能够支持接收缓冲区满和发送缓存区空中断。
∙一个能够产生RTU传输所需要的t3.5 字符超时定时器的时钟。
对于软件部分,仅仅需要一个简单的事件队列。
The STR71X/FreeRTOS 移植使用FreeRTOS 队列作为事件队列来减少Modbus 任务所需要的时间。
优耐特UNTMMIB使用说明书

第1章概述UNT-MMI智能MCC控制保护管理装置是保定市尤耐特电气有限公司在研究国外同类产品、总结国内大量MCC电气系统典型设计经验的基础上,为适应电气系统二次设备终端智能化的趋势,针对MCC回路的设计特点推出的新一代数字式、强抗干扰型智能MCC控制保护管理装置。
产品可以实现对低压电动机的各种控制、保护和监测等功能,并能通过现场总线,实现对电动机回路的远程监控。
UNT-MMI智能MCC控制保护管理装置采用通用化设计理念,在简化一次回路的基础上(省却了传统的热继电器、热保护器、欠压过压保护器等多种保护器;取消了时间继电器、中间继电器、辅助继电器、电流互感器、仪表、转换开关、指示灯、可编程逻辑控制器等多种二次分离元件),完成了二次回路的控制、保护、联锁、测量、信号、通讯等功能,极大提高了设计与生产效率,同时降低了用户现场调试及维护工作量,缩短了项目设计及调试周期,具有明显的综合效益。
1.1 监测功能1)液晶显示电流、电压、功率、功率因数、热容量等2)4-20mA远传功能3)事故记录功能4)SOE记录功能1.2 保护功能1)过载保护2)堵转保护3)过流保护4)不平衡保护5)接地保护6)漏电保护7)低压保护8)过压保护9)相序保护10)缺相保护11)欠载保护12)tE保护13)起动过长保护14)超分断保护1.3 控制功能1)面板、固定输入、可编程输入和通讯四地控制方式可以灵活实现电机的就地/远方,自动/手动控制2)禁止起动功能防止频繁起停电机3)PLC连锁逻辑控制4)电压恢复自起动1.4 通讯功能1)通过RS485通讯接口,以MODBUS@RTU通讯协议实现系统组网2)通过Profibus-DP工业现场总线实现系统组网3)通过CAN现场总线进行通讯组网第2章结构及安装尺寸装置分为三部分:显示器、主机、电流互感器(CT)。
2.1 显示器面板面板尺寸为103×602.2 主机端子图说明2.2.1 端子图2.2.2 主机安装方式固定式安装方式和卡轨安装方式,用户可自由选择。
基于Rs485的分布式整流桥测试系统
羹鬻
壤子 耩攀
基 于 Rs 4 8 5的 分 布 式 整 流 桥 测 试 系 统
谢军芳 ( 石家庄铁道学院 电气分院河北 石家庄050043)
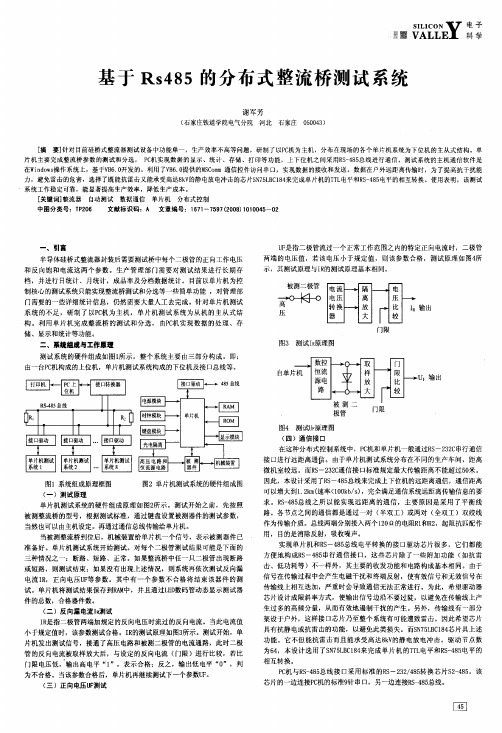
[ 摘要] 针对目前硅桥式整流器测试设备中功能单一,生产效率不高等问题,研制了以Pc 机为主机,分布在现场的各个单片机系统为下位机的主从式结构。单
片机主 要完成整流桥 参数的测试和 分选, Pc机实现数据的显示、统计、存储、打印等功能,上下位机之间采用RS一4 85总线进行通信。测试系统的主机通信软件是
当被测整流桥到位后,机械装置给单片机一个信号,表示被测器件已 准备好。单片机测试系统开始测试。对每个二极管测试结果可能是下面的
三种情况之一:断路、短路、正常。如果整流桥中任一只二极管出现断路 或短路,则测试结束;如果没有出现上述情况,则系统再依次测试反向漏
电流I R,正向电压uF等参数。其中有一个参数不合格将结束该器件的测
计算机,no.2,pp.34—35,2005. [ 4] 郭 爱文.王 静,“基于 VB的分布 式监控系 统通信设 计,”计算 机与现代
工业互联网-阀门MODBUS_RTU协议简单介绍

工业互联网-阀门MODBUS_RTU协议简单介绍MODBUS_RTU协议格式的通信的简单介绍Modbus协议是应用于电子控制器上的一种通用语言。
通过此协议,控制器相互之间、控制器经由网络(例如以太网)和其它设备之间可以通信。
它已经成为一通用工业标准。
有了它,不同厂商生产的控制设备可以连成工业网络,进行集中监控。
此协议定义了一个控制器能认识使用的消息结构,而不管它们是经过何种网络进行通信的。
它描述了一控制器请求访问其它设备的过程,如果回应来自其它设备的请求,以及怎样侦测错误并记录。
它制定了消息域格局和内容的公共格式。
当在一Modbus网络上通信时,此协议决定了每个控制器须要知道它们的设备地址,识别按地址发来的消息,决定要产生何种行动。
如果需要回应,控制器将生成反馈信息并用Modbus协议发出。
在其它网络上,包含了Modbus协议的消息转换为在此网络上使用的帧或包结构。
这种转换也扩展了根据具体的网络解决节地址、路由路径及错误检测的方法。
协议在一根通讯线上使用应答式连接(半双工),这意味着在一根单独的通讯线上信号沿着相反的两个方向传输。
首先,主计算机的信号寻址到一台仅有的终端设备(从机),然后,在相反的方向上终端设备发出的应答信号传输给主机。
协议只允许在主计算机和终端设备之间,而不允许独立的设备之间的数据交换,这就不会在使它们初始化时占据通讯线路,而仅限于响应到达本机的查询信号。
目前工业控制现场大量使用了各种智能仪表用于生产过程检测,把智能仪表检测出来的数据传送到监控计算机供显示和分析是非常必要的环节,虽然智能仪表的通信协议种类繁多,但是很多智能仪表都具备RS-232 和RS-485 两种通信接口类型。
RS-232 是美国EIA(Electronic Industry Association)与BELL 等公司一起开发的1969 年公布的通信协议,也是工业控制中应用广泛的一种串行接口,采取不平衡传输方式,即所谓单端通讯,但是它的传输距离短,(z)大约为30 米,传输速率低,(z)高速率为20kb/s,共模抑制能力差,抗噪声干扰性弱的缺点,所以RS-232 只适合本地设备之间的通信。
Modbus总线通信调试系统设计与实现

系统 Modbus 通信使用两线制 RS-485 网络作 为物 理 层。 这 里 使 用 RS-485 通 信 驱 动 芯 片
MAX485 实现。MAX485 的 DE 和 RE 引脚短接, 使用单片机 I /O 引脚控制数据传输方向。还加入 了总线终端电阻,阻值 120 Ω,可通过跳线选择是 否接入。 2. 5 人机交互单元
— 71 —
低压电器( 2014No. 1)
·现场总线与网络通信·
富[5],可以简化硬件电路。 2. 3 电源等外设单元
系统使用 HT10 - 05 开关电源供电,输入 AC 90 ~ 264 V,输出 DC 5 V,最大输出电流 2 A。节 点中除 C8051F023 芯片需要采用 3. 3 V 电源供电 外,其他各个芯片均工作在 5 V 电压下,因此使用 TI 线性稳压器芯片 REG1117 - 3. 3 进行 5 V 到 3. 3 V的电源电压转换。此外,使用 SN74LV4245 芯片对微控制器的数据和控制信号电平进行 转换。
主节点提供以下调试项目: ① 通信连通性调 试; ② 字符间隔调试; ③ CRC 校验调试; ④ 离散 量读写调试; ⑤ 寄存器读写调试; ⑥ 诊断功能 调试。
从节点提供以下调试项目: ① 通信连通性调 试; ② 响应超时调试; ③ CRC 校验调试; ④ 位数 据请求调试; ⑤ 字数据请求调试; ⑥ 诊断功能 调试。
Modbus 应用层协议规范、Modbus 在串行链路上 的实现指南、Modbus 在 TCP / IP 上的实现指南[4]。 实际中最常使用的是串行链路上的远程终端 ( Rewote Terminal Unit,RTU) 通信模式,物理层使 用两线制 RS-485 总线,所设计的调试系统也使用 这种方式。
RS485实验一报告模板

实验一基于RS485和牛顿模块的A/D、D/A实验一、实验目的和要求(1)熟悉RS485总线与牛顿模块的结构组成,了解其工作过程,认识其结构形式。
(2)熟悉牛顿模块的基本工作原理。
(3)掌握应用RS485和牛顿模块进行电压输出和电压采集的方法。
二、主要仪器设备计算机、R-8017、R-8024、R-8043D、R-8053、RS232转RS485模块、24V稳压源三、实验内容和原理(1)RS485网络分析RS485采用差分信号负逻辑,+2V~+6V表示“0”,- 6V~- 2V表示“1”。
RS485有两线制和四线制两种接线,四线制只能实现点对点的通信方式,现很少采用,现在多采用的是两线制接线方式,这种接线方式为总线式拓扑结构在同一总线上最多可以挂接32个结点。
在RS485通信网络中一般采用的是主从通信方式,即一个主机带多个从机。
很多情况下,连接RS-485通信链路时只是简单地用一对双绞线将各个接口的“A”、“B”端连接起来。
而忽略了信号地的连接,这种连接方法在许多场合是能正常工作的,但却埋下了很大的隐患,这有二个原因:1>.共模干扰问题:RS-485接口采用差分方式传输信号方式,并不需要相对于某个参照点来检测信号,系统只需检测两线之间的电位差就可以了。
但人们往往忽视了收发器有一定的共模电压范围,RS-485收发器共模电压范围为-7~+12V,只有满足上述条件,整个网络才能正常工作。
当网络线路中共模电压超出此范围时就会影响通信的稳定可靠,甚至损坏接口。
2>.EMI问题:发送驱动器输出信号中的共模部分需要一个返回通路,如没有一个低阻的返回通道(信号地),就会以辐射的形式返回源端,整个总线就会像一个巨大的天线向外辐射电磁波。
由于PC机默认的只带有RS232接口,有两种方法可以得到PC上位机的RS485电路:1>.通过RS232/RS485转换电路将PC机串口RS232信号转换成RS485信号,对于情况比较复杂的工业环境最好是选用防浪涌同时带隔离栅的产品。
智能自控调节阀说明书

ZY-ETBL直行程系列总线型智能PID自控调节阀使用说明书无锡市振源自控仪表有限公司目录产品简介 (2)型号与规格 (2)主要参数 (2)内部电气及操作规程 (3)菜单结构与操作说明 (8)通信协议 (17)阀体结构和应用场合 (19)外形尺寸图表 (20)维护与安装说明 (24)附录:P、I、D整定方法 (26)一、产品简介ZY-ET-00系列PID自控调节阀,是具有自行调节功能的电动智能调节阀。
直接与传感器连接,组成最小范围的闭环系统,PID增量式算法,对流体进行调节。
既节省了调节仪表,又可省去繁琐的远距离布线。
如果您的系统需要由中控室监控,则可选用带有现场总线功能的ZY-ETB-00总线型自控调节阀,通过RS485的方式接入监控主机(本系列产品采用标准MODBUS RTU通信协议)。
本公司生产的直行程自控调节阀主要有以下几个品种:单座阀、套筒阀、双座阀、三通分流阀、三通合流阀、衬氟阀。
二、型号与规格自控智能型电动调节阀型号与规格如下所示。
三、主要参数1、电源,单相220V交流电源。
2、输入传感器种类,热电阻:Pt100、Cu100。
电流(电压):4-20mA(1-5V),或0-20mA范围内由用户定义。
3、环境要求,温度: -10℃-- +60℃(无加热器)相对湿度:≤95%周围空气中无腐蚀性介质4、配线:信号线采用屏蔽线,与电源线隔离。
规格为 S=1.5mm²,可安装保护套管PF3/4(G3/4)。
电源电缆线采用规格为S=1.5mm²电缆线。
通信电缆线采用1.5 mm²的双绞线,也可采用带屏蔽的双绞线。
5、输出电源,本机配备直流24V电源,额定功率8W,作为传感器的电源。
6、通信接口:RS485串行通信接口,标准Modbus RTU 协议。
(选购功能)四、内部电气及操作规程1、控制模块接口说明○1电源接线端子:220V单相交流电源。
○2输入、输出端子:传感器输入,24V电源输出,报警触点输出。
基于 RS485总线和 Modbus RTU 通讯协议的液位监测系统

周 莉 娟 ( 中航工业雷华电子技术研究所 , 江苏 无锡 2 1 4 0 0 0 )
摘
要
‘
针对非接触式液位检测 , 设 计 了一 套 适 用 于 工 业 生 产 的液 位 检 测 系统 。该 系统 采 用 Mo d b u s R T U协议 , 采用 R S 4 8 5
与 上 位机 进 行 通 信 。 首 先 进行 了 系统 方 案设 计 , 在分析 R S 4 8 5和 Mo d b u s协 议 相 关性 能基 础 上 , 进 行 了软 件 设 计 , 并给 出 部 分设 计 代 码 。 实 际工 程 应 用表 明 , 该 系统 能够 稳 定运 行 。
每个 字 节 通 信 传 输 方 式 如 下 :
起始位 1 位
式将检测信号发送至分控室的上位机。总线方式采用 Mo d b u s
总线 , R T U方 式 , 采用 R S 4 8 5接 口 , 上 位 机 由液 位 监 控 计 算 机 组
墼 8 塑 位 鱼 I 1 鱼 位 堡 或 蕉 无 堕 校 壁 验I 壁 生 垡 1 位
关键 词 : 液 位检 测 , R S 4 8 5 , M o d b u s 。 R T U
Abs t r ac t Ai med a t n o n-c o pe r des i gn s a f l u i d m e a s ur i n g s y s t e m f or i n du s t r i a l f i e l d. T hi s s y s t e m u s e
PROFINET转RS485 MODBUS RTU网关连接西门子PLC和工业称重控制仪表配置案例

PROFINET转RS485 MODBUS RTU网关PNMD485-K20连接西门子PLC和工业称重控制仪表配置案例前言:随着工业现场总线技术以及工业以太网技术的飞速发展,工业自动化现场通常有多种通讯协议同时存在,对于不同协议的设备之间如何通讯,是我们必须面临解决的问题,如工业称重自动化项目中为了方便工程师实时监控称重数据,会把称重仪表接入到PLC监控系统中,在这种需求越来越多的情况下,不同协议之间可以实现协议转换就尤为重要,此方案是以微硬创新协议转换网关为例,介绍如何实现PROFINET和MODBUS-RTU的数据交换,实现MODBUS转PROFINET,或者PROFINET转MODBUS数据通讯。
项目概述:本项目现场是在国内某自动化项目,该PLC系统使用的是西门子S7-1200 PLC,支持PROFINET 工业以太网协议;工业称重仪表为国内某公司生产的,提供RS485 串口,支持标准MODBUS-RTU网络通讯协议;协议转换网关为微硬创新PROFINET转MODBUS网关PNMD485-K20项目拓扑图:项目目的:通过MODBUS转PROFINET网关完成协议转换之后,实现PLC通过RS485串口和称重仪表连接,采集称重表的各种状态值,并设置称重表的工作模式,可以通知仪表去皮、清零,打印数字,远程校正、配置参数,实时监控仪表的运行状态:1.读取仪表显示重量.2.控制仪表去皮、清零、清皮、打印、数字去皮等等3.远程校正、配置参数、加载预置点目标值等等4.监控仪表的运行状态,包括监控预置点5.读取仪表扩展输入口和控制仪表扩展输出口项目方案:由于称重控制仪表有RS485通讯接口,支持MODBUS-RTU现场总线通讯协议,作为MODBUS从站,PLC 支持PROFINET 以太网通讯协议,作为PROFINET 主站,PLC和称重控制仪表的协议是不同的,仪表是MODBUS-RTU,PLC是PROFINET,所以PLC是不能直接采集称重控制仪表的数据的,需要通过MODBUS转PROFINET/ROFINET转MODBUS协议转换模块实现不同协议间的数据交换。
FX5U和三菱变频器Modbus-RTU通讯控制
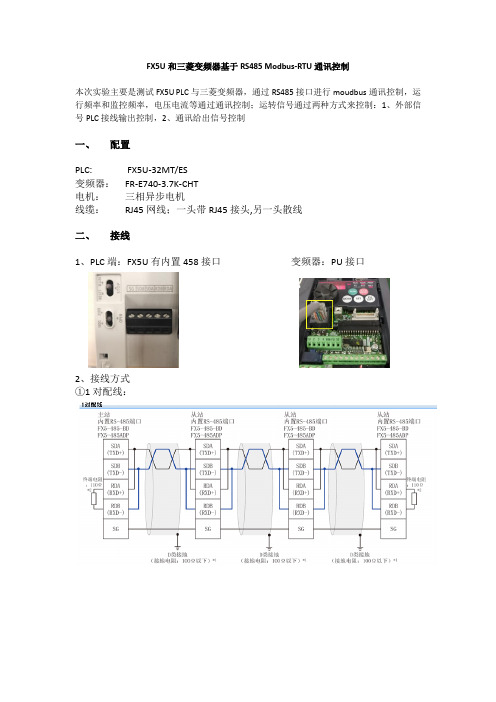
FX5U和三菱变频器基于RS485 Modbus-RTU通讯控制本次实验主要是测试FX5U PLC与三菱变频器,通过RS485接口进行moudbus通讯控制,运行频率和监控频率,电压电流等通过通讯控制;运转信号通过两种方式来控制:1、外部信号PLC接线输出控制,2、通讯给出信号控制一、配置PLC: FX5U-32MT/ES变频器:FR-E740-3.7K-CHT电机:三相异步电机线缆:RJ45网线;一头带RJ45接头,另一头散线二、接线1、PLC端:FX5U有内置458接口变频器:PU接口2、接线方式①1对配线:②2对配线这里采用的是2对配线,不同配线方式,设置终端电阻不同采用外部信号控制:PLC输出信号Y0来控制变频器运转启动变频器:接线对应:PLC 0V----COM0Y0---- STFPLC 24V----PC三、参数设置PLC端:参数---模块参数---485串口变频器:Pr.117,118,119,120对应PLC设置注意:119设定的停止位长Pr.121=9999 (9999 即使发生通讯错误变频器也不会跳闸)Pr.122=9999 (9999 不进行通讯校验(断线检测))Pr.338=0或1 (0:启动指令权通讯;1:启动指令权外部)Pr.340=1 (1 网络运行模式)Pr.79=0 (外部/PU切换模式)Pr.549=1 (1 Modbus-RTU协议)四、程序设置这里FX5U采用ADPRW命令与从站进行通信该命令可通过主站所对应的功能代码,与从站进行通信(数据的读取/写入)。
1、写入运行频率从站地址:01H功能代码:06HMODBUS地址:0DH访问点数:0(固定)读取数据存储软元件起始:D0输出通信执行状态的起始位软元件编号:M0H1:对应变频器站号(这里设置为1号站)H6:功能代码(保持寄存器写入)H0D:modbus地址,这里为频率写入,对应下表为40014,还需减去40001,为13,16进制换算为0DK0:访问点数,为固定的0,D0:数据存储软元件起始地址,这里是写入频率的值(单位:0.01HZ),要想设为转速,变频器参数Pr.37 的设定,可切换频率和转速,转速单位为(1r/min)M10:输出通信执行状态的起始位软元件编号2、监控数据从站地址:01H功能代码:03HMODBUS地址:0C8H访问点数:3(运行频率,电流,电压)读取数据存储软元件起始:D100输出通信执行状态的起始位软元件编号:M303、这里根据使用情况,运转信号采用外部控制还是通讯控制①外部控制:导通Y0即可②通讯给启动:从站地址:01H功能代码:06HMODBUS地址:8H (40009-40001H)访问点数:0(固定)读取数据存储软元件起始:D10输出通信执行状态的起始位软元件编号:M20给信号方式:对应下表比如我们给正转信号,对应位1置位,0000 0000 0000 0010,对应D10给的值即为2写入频率后,D10赋值=2,执行该程序,即可启动读取相关状态同上五、其他系列变频器的比较1、接口D700和E700,E800系列:PU接口A700,F700和A800,F800系列:PU接口,和RS485端子D700和E700系列只有PU一个接口,当连接多台时,使用分配器,这里需要注意的是,多台连接时变频器间不要连接②,⑧其他用法相同。
基于RS485总线和ModBus RTU通讯协议的浆纱机速度监测系统

时 , 慢 车 , 少 处 理工 作 量 , 致 上 浆 过 重 ; 值 车 工 为 了提 高 开 减 导 ③
自 己的工 作 量 , 安 工 艺 设 计 车 速执 行 , 不 开快 车 , 致上 浆 不 足 。 导 这些 都 会 严 重影 响 经 轴 上 浆 的均 匀 度 ,继 而 影 响 织 造 生 产
穆 岩 陈 波
( 陕西省纺织科学研究所 , 陕西 Q- 7 0 3 ) S 10 8 -
摘 要
通 过 建 立基 于 R 4 5总线 和 Mo B s R U 协议 的浆 纱 机 速 度 监 测 系统 , 实现 浆 纱机 生产 信 息 的管 理 汇 总 , 效 地 S8 d u格 式 : 不
图 1 浆 纱 机 速 度 监测 系统 构 架
11 . RS 8 4 5总 线
在 R 4 5总线 布 线 的 过 程 中 , 注 意 以下 问题 : S8 应
回应 通 信 格 式 :
站 地 址 功 能 码 字 节 数 数据 CR 校 验 C
12 _ Mo Bu TU通 讯 协 议 d sR
生 产 管理 中存 在 这 样 的 问题 :① 值 车工 通 过 调 整 浆 纱 机 的车 速
来 控 制 落轴 时 间 避 免 当班 落 轴 , 减 少 工 作 量 ; 值 车 工 在 夜 班 来 ②
Mo B s网 络 只 是 一 个 主 机 ,所 有 通 信 都 由 它 发 出 。 在 d u Mo B s系 统 中 有 2种 传输 模 式 可 选 择 。一 种 模 式是 A CI 美 d u S I ( 国 信 息 交换 码 )另 一 种 模 式 是 R U( 程 终 端 设 备 ) , T 远 。浆 纱机 速
基于MODBUS_RTU协议的PLC多路数据采集系统

2) PL C 控 制 与 显 示 层 涉 及 PL C 控 制 设 备 ADAM25510 E/ TCP 和显示屏 ,ADAM25510 E/ TCP 通过 ADAM25510 Series Utilit y 软件平台与工作主 机通信 ,实现嵌入式编程 。采用串口 1 接口与显示 屏连接 ,通过 ADAM 输入/ 输出模块和串口 2 控制 各传感器 ,采用 RJ245 网络口与上位机通信并存储 数据信息 。
4) COM4 ( RS2232/ RS2485) 为保留端口 。 设计实现如图 1 所示 。
器 ,然后通过程序按 MODBU S2R TU 通信协议发送 垂询指令 ,观察响应数据情况 。程序中关键的一步 是输入十六进制指令的 A SC II 码 ,转换为十六进制 显示 。程序流程如图 2 所示 。
2 系统结构设计
可编程逻辑控制器 ( PL C) 远程通信控制主模块 ADA M25510 E/ TCP 有 4 个 通 信 端 口[526 ] : COM1 , COM2 ,COM3 和 COM4 。端口应用情况如下 :
1) COM1 有 2 种工作方式 : RS2232 和 RS2485 , 本设计采用 RS2232 串口形式接当地显示屏 ,用于 显示部分数据信息 。
变为 F10003090300C57CF2 和 01030000000D840 F , 分别召测水位闸位计和泵机传感器的数据 。程序接 收界面如表 2 所示 。
测试证明 ,对总线上的传感器进行数据召测 , RS2485 总线上的传感器同时回复响应信息 ,总线上 因竞争现象而出现乱码 ,只能返回部分传感器数据 。
飞机液压系统单向阀压力损失测试系统的开发

基金项目:2020年度江苏航空职业技术学院院级课题资助项目(编号:JATC20010112)收稿日期:2020-10-23飞机液压系统单向阀压力损失测试系统的开发*李辰童,翟欢乐(江苏航空职业技术学院工程学院,江苏镇江212000)摘要:单向阀是飞机液压系统中的重要组成部件,准确测得其压力损失对研究液压系统的性能具有重要指导意义。
开发了一种单向阀压力损失测试系统,介绍了测试系统的设计原理和设计功能,利用离心泵的相似曲线特性完成算法设计,利用快速接头实现不同规格单向阀的快速连接,完成硬件平台和软件平台的开发,具有适用范围广、测试精度高的特点,拥有较大的工程应用价值。
关键词:压力损失;单向阀;飞机液压系统中图分类号:TB472文献标志码:A文章编号:1009-9492(2021)05-0118-03Development of Pressure Loss Test System for Check Valve of AircraftHydraulic SystemLi Chentong ,Zhai Huanle(School of Engineering,Jiangsu Aviation Technical College,Zhenjiang,Jiangsu 212000,China )Abstract:Check valve is an important component of aircraft hydraulic system.Accurate measurement of its pressure loss is of great significance for the study of the performance of hydraulic system.A test system for pressure loss of check valve was developed.The design principle and function of the test system were introduced.The algorithm design was completed by using the similar curve characteristics of centrifugal pump.The quick connection of different specifications of check valve was realized by using quick connector.The development of hardware platform and software platform was completed.It has the characteristics of wide application range and high test accuracy,and has great engineering application value.Key words:pressure loss;check valve;aircraft hydraulic system第50卷第05期Vol.50No.05机电工程技术MECHANICAL &ELECTRICAL ENGINEERING TECHNOLOGYDOI:10.3969/j.issn.1009-9492.2021.05.032李辰童,翟欢乐.飞机液压系统单向阀压力损失测试系统的开发[J ].机电工程技术,2021,50(05):118-120.0引言在航空领域,随着国家对飞机、直升机这类利用空气动力进行升空的航空器愈发重视,对于飞机整体的可靠性要求也越来越严格,而液压系统作为飞机上十分重要的辅助能源系统,直接影响到飞机的整体安全[1]。
RS485压力传感器说明书(1)

RS485压力传感器说明书(1)
1、变送器基本技术参数
(1)工作电源: 9~36VDC
(2)输出信号:RS485 (距离可到1000米,最多32路)
(3)标准Modbus-RTU 协议(03功能)
(4)串口数据格式:9600bps, N,8,1
(5)测式范围:0-X(Mpa,kpa….)
(6)分辨率:0.05%
(7)工作环境:-40~85℃,
(8)输出数据:0 (2000)
(9)响应速度为大于500ms
2、接线方式(一般方式)
(1)蓝线:Gnd (2)红线:24V正
(3)黑线/黄线:485输出A (4)白线:485输出B
3,Modbus-RTU 03命令详细说明(数据都为16进制数)
(1)协议格式说明:
设备地址功能码,数据地址,读取数据个数,16CRC码(低前高后)主机命令: [Address]03 00 00 00 01 CRC0 CRC1
设备地址功能码,数据字节数,压力值16CRC码(低前高后)从机返回: [Address]03 02 P_hi P_lo CRC0 CRC1
5、16CRC效验
16CRC效验是Modbus协议使用的一种标准的错误效验方法,一般都有详细说明,及程序详解,这里不做说明了。
RS485通讯测试
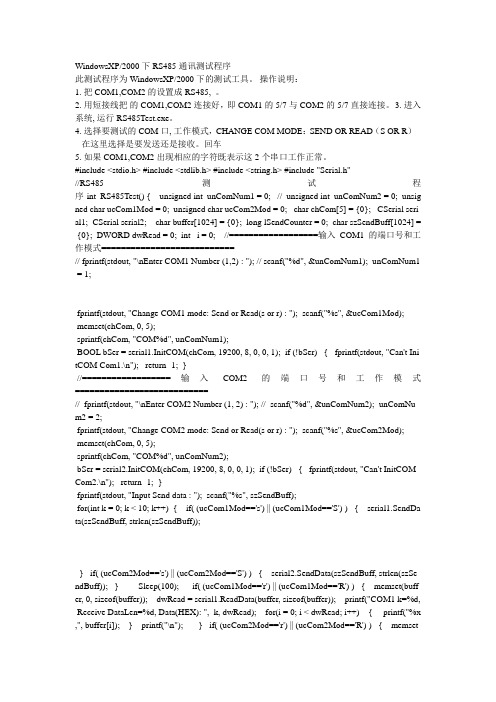
WindowsXP/2000下RS485通讯测试程序此测试程序为WindowsXP/2000下的测试工具。
操作说明:1. 把COM1,COM2的设置成RS485, 。
2. 用短接线把的COM1,COM2连接好,即COM1的5/7与COM2的5/7直接连接。
3. 进入系统, 运行RS485Test.exe。
4. 选择要测试的COM口, 工作模式,CHANGE COM MODE:SEND OR READ(S OR R)在这里选择是要发送还是接收。
回车5. 如果COM1,COM2出现相应的字符既表示这2个串口工作正常。
#include <stdio.h> #include <stdlib.h> #include <string.h> #include "Serial.h"//RS485 测试程序 int RS485Test() { unsigned int unComNum1 = 0; // unsigned int unComNum2 = 0; unsig ned char ucCom1Mod = 0; unsigned char ucCom2Mod = 0; char chCom[5] = {0}; CSerial seri al1; CSerial serial2; char buffer[1024] = {0}; long lSendCounter = 0; char szSendBuff[1024] = {0}; DWORD dwRead = 0; int i = 0; //==================输入COM1的端口号和工作模式===========================// fprintf(stdout, "\nEnter COM1 Number (1,2) : "); // scanf("%d", &unComNum1); unComNum1 = 1;fprintf(stdout, "Change COM1 mode: Send or Read(s or r) : "); scanf("%s", &ucCom1Mod); memset(chCom, 0, 5);sprintf(chCom, "COM%d", unComNum1);BOOL bSer = serial1.InitCOM(chCom, 19200, 8, 0, 0, 1); if (!bSer) { fprintf(stdout, "Can't Ini tCOM Com1.\n"); return -1; }//==================输入COM2的端口号和工作模式===========================// fprintf(stdout, "\nEnter COM2 Number (1, 2) : "); // scanf("%d", &unComNum2); unComNu m2 = 2;fprintf(stdout, "Change COM2 mode: Send or Read(s or r) : "); scanf("%s", &ucCom2Mod); memset(chCom, 0, 5);sprintf(chCom, "COM%d", unComNum2);bSer = serial2.InitCOM(chCom, 19200, 8, 0, 0, 1); if (!bSer) { fprintf(stdout, "Can't InitCOM Com2.\n"); return -1; }fprintf(stdout, "Input Send data : "); scanf("%s", szSendBuff);for(int k = 0; k < 10; k++) { if( (ucCom1Mod=='s') || (ucCom1Mod=='S') ) { serial1.SendDa ta(szSendBuff, strlen(szSendBuff));} if( (ucCom2Mod=='s') || (ucCom2Mod=='S') ) { serial2.SendData(szSendBuff, strlen(szSe ndBuff)); } Sleep(100); if( (ucCom1Mod=='r') || (ucCom1Mod=='R') ) { memset(buff er, 0, sizeof(buffer)); dwRead = serial1.ReadData(buffer, sizeof(buffer)); printf("COM1 k=%d, Receive DataLen=%d, Data(HEX): ", k, dwRead); for(i = 0; i < dwRead; i++) { printf("%x ,", buffer[i]); } printf("\n"); } if( (ucCom2Mod=='r') || (ucCom2Mod=='R') ) { memset(buffer, 0, sizeof(buffer)); dwRead = serial2.ReadData(buffer, sizeof(buffer)); printf("COM2 k =%d, Receive DataLen=%d, Data(HEX): ", k, dwRead); for(i = 0; i < dwRead; i++) { print f("%x,", buffer[i]); } printf("\n"); } } serial1.Close(); serial2.Close(); return 0; }int main(int argc, char **argv){ RS485Test(); return 0;}// Serial.cpp: implementation of the CSerial class. //////////////////////////////////////////////////////////////////////// //#include <winioctl.h> #include <stdio.h> #incl ude <conio.h> #include <stdlib.h>#include "Serial.h"////////////////////////////////////////////////////////////////////// // Construction/Destruction//////////////////////////////////////////////////////////////////////CSerial::CSerial() {memset(&m_OverlappedRead, 0, sizeof( OVERLAPPED)); memset(&m_OverlappedWrite, 0, s izeof( OVERLAPPED)); m_hIDComDev = NULL; fWaitingOnRead = FALSE; } CSerial::~CSerial() {Close(); }/************************************************************************RS-485通讯说明由于RS-485是半双工通信,故同一时刻只能发送或接收。
串口RS485 232转modbusRTU ASCII通信网关SS-431案例1

实现一个/一组串口设备通过SS-431变成Modbus 设备——泗博自动化通用串口转Modbus 转换模块的应用摘要:介绍带有Modbus 通信接口的PLC 与3种非Modbus 协议的串口设备实现通信的方法,泗博自动化的智能串口协议转换模块SS-431在其中的应用。
关键词:Modbus 通用串口 串口协议 串口通信 协议转换一. 引言现代工业的迅速发展,不断促进着自动化控制技术及设备通信技术的创新和发展。
当前,PLC 、DCS 、智能仪表等已广泛应用到现场生产控制系统中,并发展到由上述设备相互协同、共同面向整个生产过程的分布式工业控制系统。
在此系统中,现场总线通信技术至关重要。
本文就非Modbus 连接到Modbus 网络,实现数据的预采集和控制,泗博自动化的智能串口协议转换模块SS-431正是起到这关键的作用。
二. SS-431将非Modbus 设备转换成Modbus 设备SS-431智能串口协议转换模块使用通用模式与这些非Modbus 协议串口设备建立通信,实现数据的预采集和控制。
SS-431的另一侧设置为Modbus 从站,与带有Modbus 主站接口的PLC 或工控机等控制器进行数据的双向交换。
如下图1所示:……变频器条码扫描仪多功能电能监测仪表PLCSS-431……变频器条码扫描仪多功能电能监测仪表……变频器条码扫描仪多功能电能监测仪表SS-431SS-431图1 系统结构图上图中有三种非Modbus 协议的串口设备,串口协议1、串口协议2和串口协议3是三种不同的通信协议,其中串口协议1和串口协议2的通信方式为问答式通信,串口协议3是设备有数据时立即发送数据的通信方式。
三. Modbus协议简介Modbus协议是一种适用于工业控制领域的主从式串口通讯协议,它采用查询通讯方式进行主从设备的信息传输,可寻址1-247个设备地址范围。
协议包括广播查询和单独设备查询两种方式,二者区别就是广播查询不需要从设备回应信息,主、从设备查询通讯过程见如图2所示:主设备查询图2 Modbus主、从设备查询响应Modbus协议常用功能码如图3所示:图3 Modbus协议常用功能码Modbus协议有两种传输模式:ASCII模式和RTU模式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现 对 多 台 阀 门状 态信 息 的快 速 ; 1 2 总。 关 键 词 :RS一4 8 5 ; M ODB US—R TU 通 信 协 议 ; 阀门; 测 试
中 图 分 类 号 :TP 3 1 9
文 献 标 识 码 :A
Co mp u t er I n s p e c t e d Sy s t em o f Val v e Ba s e d o n RS一 4 8 5 an d Mo d Bu s — RTU Pr ot o c ol
。
j
技 术 纵 横
∞ 。薯曩 。
0 譬l 一 | | 曩曩一露撕 薯鬻 鬻曩 篝
Hale Waihona Puke R S一4 8 5总线和 MO D B U S —R T U协议 的阀门测试 系统
胡 宏泽 , 章 勇
( 南 京 航 空航 天 大 学 计 算 机 科 学 与 技 术 学 院 , 南京 2 1 0 0 1 6 )
引 言
随 着 计 算 机 技 术 应 用 的 日渐 广 泛 , 工业 自动 化 技 术 也 随 之 不 断 地 向着 更 高 层 次 的 综 合 自动 化 方 向 发 展 。 阀 门 作 为 工 业 自动 化 中最 重要 的 被控 对 象 之 一 , 如何 做 到 检 测 和 控 制 的集 中化 、 智 能 化 已经 成 为 了 该 领 域 重 要 的课 题 。
题, 即如 何 从 RS一2 3 2线 上 获 得 电路 和 RS一4 8 5接 口 驱
1 方 案 综述
基于 R S~4 8 5总 线 和 MOD B US—RTU 协 议 的 阀 门
动 所 需 的功 率 和 如 何 智 能 控 制 R S一 4 8 5的 收 发 使 能 。基
于 以上 几 点 , 本 文 采 用 HE xI N —I I I型 转 换 器 , 它 无 需 任
a n d Mo dBus — RTU .The s ys t e m i s be t t e r a t c e nt r a l i z e d d e t e c t i o n a nd p r e c i s e c ont r o l l i n g,a c hi e v i ng a g gr e ga t e s t a t us i n f or ma t i on ma na ge — me nt be t we e n s e ve r a l v a l ve s . Ke y wo r d s: RS - 4 85; M ODBU S — R TU c om m un i c a t i o n p r ot o c o l ;va l v e; i ns pe c t
图 1 阀 门 测试 系统 构 架
本 系统 主要 是 计 算 机 串 口通 过 R S 一2 3 2 / R S ~4 8 5智
能 转 换 器 连 接 多 台 阀 门控 制 器 , 对 RS一4 8 5总 线上 的设 备
轮 流 进 行 通 信 。 因此 该 智 能 转 换 器 必 须 解 决 两 个 关 键 问
s u r e s e v e r a l v a l v e s g o o d r u n n i n g,p r e v e n t i n g i mp r o p e r o p e r a t i o n,a c o mp u t e r i n s p e c t e d s y s t e m o f v a l v e i s e s t a b l i s h e d b a s e d o n RS - 4 8 5
本 文 设 计 了一 种 集 保 护 与 控 制 为 一 体 的 基 于 R S一 4 8 5 总
线 和 M0DB US—RTU 协 议 的 阀 门 测 试 系 统 , 该 系 统 能 够 对 多 台 阀 门进 行 集 中 式 检 测 , 并且 可 以做到精 确控 制 , 保 障 多 台 阀 门正 确 高 效 的运 行 。
测试系统总体方案 如图 1 所示, 系 统 主 要 由上 位 机 、 通 信
摘要: 针 对 原 有 阀 门测 试 系统 检 测 效 率 低 、 可控 性 差 的特 点 , 为保 障 多台阀 门正常运 行 , 避免 不 当的操作 , 建 立 了基 于
R S一4 8 5总 线 和 MODB US— RTU 通 信 协 议 的 阀 门测 试 系统 。该 系统 能 更好 地 对 多 台阀 门进 行 集 中检 测 和 精 确控 制 , 实
Hu Ho n g z e,Zh a n g Yo n g
( Co l l e g e o f Co mp u t e r S c i e n c e a n d Te c h n o l o g y,Na n j i n g Un i v e r s i t y o f Ae r o n a u t i c s a n d As t r o n a u t i c s ,Na n j i n g 2 1 0 0 1 6,Ch i n a )