垂直三关节手臂ppt课件
基本手势与手势礼仪课件PPT(共 48张)

•
12、有些压力总是得自己扛过去,说出来就成了充满负能量的抱怨。寻求安慰也无济于事,还徒增了别人的烦恼。
•
13、认识到我们的所见所闻都是假象,认识到此生都是虚幻,我们才能真正认识到佛法的真相。钱多了会压死你,你承受得了吗?带,带不走,放,放不下。时时刻刻发悲心,饶益众生为他人。
•
14、梦想总是跑在我的前面。努力追寻它们,为了那一瞬间的同步,这就是动人的生命奇迹。
引领动作
第一,横摆式。以右手为例:将五指伸直并拢,手心不要凹陷, 手与地面呈45度角,手心向斜上方。腕关节微屈,腕关节要低于肘 关节。动作时,手从腹前抬起,至横膈膜处,然后,以肘关节为轴 向右摆动,到身体右侧稍前的地方停住。同时,双脚形成右丁字步, 左手下垂,目视来宾,面带微笑。这是在门的人口处常用的谦让礼 的姿势。
Ok 手势的含义
• 我国和其他国家: 零或三
• 泰国: 没有问题
• 日本、缅甸、韩国: 金钱
• 印度: 正确、不错
• 美国、英国: 赞同、了不起
• 法国: 零或没有
• 突尼斯: 傻瓜
• 巴西: 侮辱男人、引诱女人
攥紧拳头
• 暗示进攻、自卫,表 示力量,表示愤怒
•双手伸到身后 双手相握 同时昂首挺胸
• 打招呼(greeting)手势语言: 英语国家人在路上打招呼,常 常要拿帽子表示致意。现一般 已化为抬一下帽子,甚至只是 摸一下帽沿。
5、指示手势
用以引导来宾,指示方向的手 姿
规范的手势:手掌自然伸直,掌
心向内向上,手指并拢,拇指稍 稍自然分开,手腕伸直,使手与 小臂成一直线,肘关节自然弯曲, 大小臂的弯曲以140°
•
20、每一个成就和长进,都蕴含着曾经受过的寂寞、洒过的汗水、流过的眼泪。许多时候不是看到希望才去坚持,而是坚持了才能看到希望。
机器人学_第2章_机器人机械结构

– 肩关节的摆动:
• 电机M2→同步带传动B2→减速器R2→肩关节摆动n2
29
腕部俯仰
关节型机器人传动 系统图:
肘关节摆动
肩关节的摆动
腕部的旋转
30
腕部旋转局部图例:
电机M5→减速器R5→链轮 副 C5→锥齿轮副G5→旋转运动n5
上料道与下料道分 别设在机床的两侧, 双臂能同时动作, 两臂同步沿横梁移 动,缩短辅助时间
b.双臂交叉配置,
两臂轴线交于机床 的中心,两臂交错 伸缩进行上下料, 并同时沿横梁移动
c.双臂交叉配置,
悬伸梁式,横梁长 度较a,b短,双臂位 于横梁的同一侧
5
(2).双臂悬挂式(b)
双臂回转型,双 臂交叉且绕同轴 回转,分别负责 上下料(主要是 盘状零件),只 需一个动力源, 结构紧凑,动作 范围大
第2章 机器人的机械结构
2.1 机身和臂部 2.2 腕部和手部结构 2.3 传动部件设计
1
2.1 机身和臂部
• 一.机身和臂部的作用
• 机身是直接连接支承传动手臂和行走机 构的部件,机身可以是固定的,也可以 是行走式的
• 手臂部件用来支承腕部(关节)和手部 (包括工件和工具),并带动它们在空 间运动
• 远距离传动手腕:
–有时为了保证具有足够大的驱动力,驱动装 置又不能做得足够小,同时也为了减轻手腕 的重量,采用远距离的驱动方式,可以实现 三个自由度的运动。
44
1)液压直接驱动BBR手腕图例:
回转 R
俯仰 B
偏转 B
45
2). 单回转腕部 结构示例
46
3)双回转油缸驱动手腕
机器人的组成结构(PPT52页)
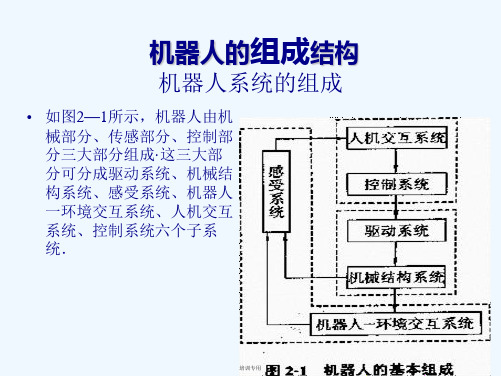
• 机器人一环境交互系统 机器人一环境交互系统是实现机器人与外部环境中的设备相 互联系和协调的系统.机器人与外部设备集成为一个功能单 元,如加工制造单元、焊接单元、装配单元等
度,即重复度。
培训专用
工作空间(Working space):机器人手腕 参考点或末端操作器安装点(不包括末端 操作器)所能到达的所有空间区域,一般 不包括末端操作器本身所能到达的区域。
培训专用
工业机器人的机械结构
工业机器人的机械本体类似于具备上肢机能的机械手 ,由 手部、腕部、臂、机身(有的包括行走机构)组成。
培训专用
• 正弦波电动机(交流无刷伺 服电动机):顾名思义,它 是由正弦波电流驱动的。对 三相情况,电流相位差 120。,而且这三相电流是 随转子位置不同而不同的, 也就是说,转子的位置检测 需更精确,驱动电路也比梯 形波电动机的更复杂,但却 代表着无刷电动机最高水平, 因为它能保持恒定转矩输出
培训专用
加入速度反馈。一般直流电动机和位置反馈、速度反馈形成 一个整体,即通常所说的直流伺服电机。由于采用闭环伺 服控制,所以能实现平滑的控制和产生大的力矩
• 当今大部分机器人都采用直流伺服电机驱动机器人的各个关节, 但它们也有一些缺点,如转速不能太高
• 近年来,新发展起来的无刷直(交)流伺服电动机克服了 上述缺点,并保留了直流伺服电动机的优点,因此无刷电 动机逐渐取代了直流伺服电动机
培训专用
相关术语及性能指标
手部解剖及肌肉ppt

04 手部运动与控制
手指的屈曲与伸展
手指屈曲
是指手指向手掌方向弯曲的动作,主要由屈指肌群控制,包括桡侧和尺侧屈指 肌。
手指伸展
是指手指从屈曲状态向伸直状态的运动,主要由伸指肌群控制,包括指总伸肌 和固有伸肌。
拇指的对掌运动
拇指对掌运动
是指拇指与手掌相对运动,使拇指能够进行对捏和夹持物体的动作,主要由大鱼 际肌群控制。
对掌运动的重要性
对掌运动对手部功能至关重要,它使手部能够进行精细操作和抓握物体,提高手 部的灵活性和协调性。
手部的协调运动
手部协调运动
是指手部各肌肉和关节的协同工作,使手部能够完成各种复 杂和精细的动作,如抓握、捏、推、拉等。
协调运动的机制
手部协调运动依赖于大脑对手部肌肉的控制和手部关节的灵 活性和稳定性,同时还需要视觉、触觉等多种感觉输入的协 调作用。
正中神经
负责手掌桡侧和拇指、中 指和无名指的桡侧半的感 觉,以及这些手指对掌和 对指等动作。
桡神经
主要负责手背桡侧和拇指、 食指、中指的桡侧半的感 觉,以及这些手指的伸展 和外展等动作。
血管分布
桡动脉
主要负责手部桡侧的血液 供应,是手部的主要动脉 之一。
尺动脉
主要负责手部尺侧的血液 供应,是手部的主要动脉 之一。
06 手部康复与保健
康复训练方法
主动训练
通过主动运动来恢复手部功能 ,如抓握、捏、推、拉等动作 ,有助于改善手部肌肉力量和
协调性。
被动训练
通过外力被动地活动手部关节 ,如关节松动术,可以缓解关 节僵硬,改善关节活动范围。
功能性训练
模拟日常生活活动中的动作, 如捡拾物品、系鞋带、拿杯子 等,以提高手部在实用场景中 的功能。
机械手臂教材ppt课件

三、机器手臂的组成
手臂由以下几部分组成: (1)运动元件。如油缸、气缸、齿条、凸轮等是驱
动手臂运动的部件。 (2)导向装置。是保证手臂的正确方面及承受由于
工件的重量所产生的弯曲和扭转的力矩。 (3)手臂。起着连接和承受外力的作用。手臂上的
零部件,如油缸、导向杆、控制件等都安装在手臂上。 此外,根据机械来自运动和工作的要求,如管路、冷却
多轴机械手臂研发方面,多轴式机械手臂广泛应用于汽车製造 商、汽车零组件与电子相关产业。机械手臂可以提昇产品技术 与品质,而这些初期工作大多可以藉由机械手臂来完成。
近年来,各先进国家为了提昇台机器人的技术水准,都会推广 机器人产业与创立相关联盟,并且特别针对工业以外的领域进 行推广,例如:医疗、服务、生活方面…等。
机械手臂教材
目录
一、演进与发展 二、种类与原理
三、组成 四、应用于发展
一.演进与发展
1921年捷克科幻作家卡雷尔·恰佩克的《罗素姆的万 能机器人》最早出现机器人。 1956年第一台专门应用于产业生产使用的机械手臂 则是由具有「机械手臂之父」之称的约瑟夫·恩格伯 格(Joseph F. Engelberger)所发明的。利用乔治·迪 沃尔(George Devol)所授权的专利技术,研发出第 一台工业用机械手臂,名为「Unimate」。
装置、行程定位装置和自动检测装置等,一般也都装 在手臂上。所以手臂的结构、工作范围、承载能力和 动作精度都直接影响机械手的工作性能。
四、应用与发展
机械手臂在产业自动化的应用已经相当广泛,主要是使用于人 工无法进行或者会耗费较多时间来做的工作,机械手臂在精度 与耐用性上可以减少许人为的不可预知问题。
乔治·迪沃尔
1963年日本不二輸送机工业株式会社制造出专门 使用在栈板装载(Palletizing)的机械手臂,研发出 针对栈板专用的搬运工具。 1973年德国库卡机器人集团(KUKA Robot Group) 就研发出第一台采用机电驱动的6轴机械手臂。
上肢解剖详细解读PPT课件

25
正中神经合并尺神经损伤,出
现猿手畸形
26
27
28
29
30
总结
三大神经损伤后出现三大畸形 三大神经损伤后出现三大固有感觉区消失 三大神经损伤后出现三个特殊不能完成的动作 伸指肌腱的功能是伸掌指关节 屈掌指关节伸指间关节的功能是蚓状肌及骨间 肌功能 指深指浅屈肌腱的检查方法。
31
总结
上肢解剖
1
肩
2
肘
3
4
5
6
7
8
9
10
桡神经损伤:垂腕垂指畸形,虎口感觉消失
11
12
13
14
15
16
17
尺神经损伤:爪形手 畸形,小指中末节感 觉消失,夹纸(尺) 试验阳性,Froment 阳性
18
19
20
21
22
示中指末节固有区痛觉消失
23
拇指掌侧外展不能或乏力 24
动脉:肱动脉、桡动脉、尺动脉 骨筋膜室综合征出现5P:无脉、苍白、疼 痛、麻痹、肌肉瘫痪
32
上肢下肢解剖图例ppt课件
上肢肌肉主要负责抓握、操作和移动等动 作,下肢肌肉主要负责支撑体重和行走等 动作。
肌肉分布
肌肉形态
上肢肌肉分布在上肢周围,下肢肌肉分布 在下肢周围。
上肢肌肉形态多样,下肢肌肉形态相对单 一。
神经比较
神经分布
上肢神经主要来自颈神经和胸神经,下肢神 经主要来自腰神经和骶神经。
神经类型
上肢神经类型包括臂丛、桡神经等,下肢神 经类型包括坐骨神经、胫神经等。
血管形态
上肢血管形态多样,下肢血管形态相对单一。
04
临床应用与案例分析
临床诊断中的应用
诊断依据
通过观察解剖图例,医生可以更 直观地了解人体上肢和下肢的骨 骼、肌肉、血管和神经等结构,
为临床诊断提供依据。
疾病鉴别
通过对比正常解剖图例与异常病例 的差异,有助于医生鉴别病变的性 质和部位,提高诊断的准确性。
血管与神经
上肢血管与神经分布较下肢更为 复杂,与手部精细动作密切相关。
对未来研究的展望
深入研究
针对上肢下肢解剖图例的细节进行深入研究,如 肌肉、血管、神经等的具体分布和功能。
教育普及
通过普及解剖学知识,提高公众对人体结构的认 识和了解。
ABCD
临床应用
将研究成果应用于临床医学,提高手术的精准度 和治疗效果。
神经功能
上肢神经主要负责感觉和运动功能,下肢神 经主要负责感觉和运动功能。
神经连接方式
上肢神经连接方式相对简单,下肢神经连接 方式相对复杂。
血管比较
血管数量
上肢血管数量较多,下肢血管数量较少。
血管功能
上肢血管主要负责供血和供氧等作用,下肢血管主要负责供血和供氧等作用。
血管分布
上肢血管分布在上肢周围,下肢血管分布在下肢周围。
运动解剖学-PPT

下肢带关节图
骨盆
组成:由骶骨、尾骨和两侧的髋骨以及连结 它们的关节(即下肢带关节,包括骶髂关节、 耻骨联合。)和韧带构成。
结构特征:形似拱形结构。两侧的髋骨和 中间的骶骨类似拱形建筑结构的穹窿,两侧 的髋臼架在股骨头上,股骨有如穹窿柱。它 具有既坚固又省材和防震的特点。
骨盆
功能:具有支持人体上身的重量、传递和分散人体负 荷的压力、缓冲震荡、保护腹腔和盆腔内脏器官、肌 肉附着等功能;上连脊柱,下接股骨,活动时可增大 躯干和下肢运动的幅度。
肩关节韧带
肘关节
组成:由肱骨远侧端和桡、尺骨近侧端 的关节面组成。包括肱尺关节、肱桡关 节和桡尺近侧关节。肱尺关节由肱骨滑 车与尺骨滑车切迹构成;肱桡关节由肱 骨小头与桡骨头凹构成;桡尺近侧关节 由桡骨环状关节面与尺骨的桡切迹构成。
肘关节
结构特征:肱尺关节为滑车关节;肱桡关节为 球窝关节,但受尺骨限制不能绕矢状轴运动; 桡尺近侧关节为圆柱关节。三个关节包在一共 同关节囊内,彼此又可独立运动,为典型的复 关节。关节囊前、后薄壁而松弛,有利于屈伸 运动,两侧壁厚而紧张,并有韧带加强。关节 囊后壁最薄弱,故常见桡、尺骨两骨向后脱位, 移向肱骨的后上方。加固肘关节的韧带有桡侧 副韧带、尺侧副韧带和桡骨环状韧带。所有加 固韧带均不附着于桡骨,从而保证了桡骨能绕 垂直轴做回旋运动。
膝关节的组成
膝关节解剖图
膝关节解剖图
踝关节
踝关节(又名距骨小腿关节或距上关节) 组成:由胫骨的下关节面、内踝关节面和腓骨的外
踝关节面共同形成的叉状关节窝,以及距骨滑车的关 节头构成。
结构特征:属滑车关节。关节囊前后松驰,利于屈 伸运动。两侧有韧带加固,内侧的是三角韧带,可限 制足过度外翻;外侧的三条韧带(前方的距腓前韧带、 中部的跟腓韧带、后方的距腓后韧带),均较薄弱, 有防止小腿移位和限制足过度内翻的功能。在踝关节 韧带损伤中,以外侧最为常见,尤以距腓前韧带为多
上肢PPT课件
故最长,连接大拇指的掌骨 最短,只相当于食指掌骨约 2/3,连接中指、无名指和小 指的掌骨比食指掌骨依次缩 短。
• 3.指骨 • 是指拇指骨、食指骨、中
指骨、无名指骨和小指骨。 每个指骨又分为三节:基节、 中节、末节。其中:中节的 长度相当于基节的2/3强,而 末节的长度约相当于中节的 1/2长,中指骨最长、其次是 无名指骨、食指骨、小指骨。 大拇指骨只有两节,基节和 末节。
上肢部
• 第一节 上肢的骨骼 • 上肢的骨骼有上肢带骨,包括锁骨和肩胛骨,
上臂的肱骨,前臂的桡骨和尺骨,手部的腕骨 (8块)、掌骨(5块)和指骨(14块).
精选ppt
4
• 一、上肢带骨骼
• 1、锁骨
• 锁骨位于颈部下端、胸廓上方,锁骨内段 链接胸骨,外端链接肩胛骨。是整个躯干 中显露于皮下最清楚的一个骨骼组织。
在大臂的内侧,肱二头 肌屈伸时,使自身的形 态变化较大,在小臂伸 展时肌肉处于放松状态, 细长、横断面的直径小; 在小臂弯曲时肌肉处于 紧张状态,短粗、横断 面的直径成倍地增大。
精选ppt
49
精选ppt
50
• 4.肱三头肌
• 起点:肱骨上头内外侧, 肩胛骨外侧下方(肩胛盂 下方粗隆)。
• 止点:尺骨鹰嘴。
• 一、上肢带肌肉 • 上肢带肌肉包括三
角肌、冈下肌、大 圆肌和小圆肌. • 1.三角肌 • 起点:锁骨外 侧1/3处,肩峰、 肩胛冈。 • 止点:肱骨1/2 处,但在体表插 入肱二头肌和肱 肌之间,因此只 占大臂1/3强。 • 作用:外展上 臂等。
•
上
• 作用:使肩关节外展,前部 肌束收缩可使肩关节屈曲和
• 结构要点: • A.手部骨骼的厚度对手
机械臂结构设计原理ppt

3.关节型机械臂的结构(1)
存在的运动型式:
机身的旋转运动; 肩关节和肘关节的摆动; 腕关节的俯仰和旋转运动;
各运动的协调: 称为5轴关节型机器人。
五轴关节型机器人手臂运动图例(1):
俯仰 偏转 肘转
肩转
腰转
腰转姿态
五轴关节型机器人手臂运动图例(2):
肩关节、肘关节与手腕的协调
3.关节型机械臂的结构(2)
工字钢(GB706-88):
1、工字钢的型号与高度尺 寸h有关,如:10号工字钢 即指其高度尺寸为100mm。 2、其它参数如截面积、单 位长度的理论质量、截面静 力矩等可查相应的设计手册。 3、工字钢的长度按长度系 列购买。如:5~19m。
槽钢(GB707-88)
1、槽钢的型号与高度尺寸 h有关,如:10号槽钢即指 其高度尺为100mm。
各运动的实现:
腕部的旋转:
电机M5→减速器R5→链轮副C5→锥齿轮副G5→旋转运动n5 电机M4→减速器R4→链轮副C4→俯仰运动n4 电机M3→两级同步带传动 B3 、B3′→ 减速器 R3→肘关节摆动 n3 电机M2→同步带传动B2→减速器R2→肩关节摆动n2
腕部俯仰:
肘关节摆动:
4.极坐标型:
臂部由两个转动 副和一个移动副 组成。产生沿手 臂轴X的直线移 动,绕基座轴Y 的转动和绕关节 轴Z的摆动。其 手臂可作绕Z轴 的俯仰运动,能 抓取地面上的物 体。
三、典型机械臂结构
1.手臂直线运动机构
常见方式:
行程小时:采用油缸或汽缸直接驱动; 当行程较大时:可采用 油缸 或汽缸驱动 齿条传动的倍增机构或采用步进电机或 伺服电机驱动,并通过丝杆螺母来转换 为直线运动。 油缸驱动的手臂伸缩运动结构 电机驱动的丝杆螺母直线运动结构
徒手控制(警务技能教案)PPT幻灯片课件
序言
一、徒手防卫与控制技术在警务 执法活动中的重要性
二、警察徒手防卫与控制技术的 可操作性
三、徒手防卫与控制技术的学习 内容
概念
徒手防卫与控制技术是指警察在执 行警务活动中,遇到不能、不便或者来 不及使用警械和武器的情况时,用徒手 制止暴力侵害,保护自身安全,抓捕控 制违法犯罪嫌疑人所采取用的技术,徒 手防卫与控制是围绕以执法控制为目的 的技术。掌握、合理运用徒手防卫与控 制技术,对于提高警察执法活动的成功 率、最大限度地减少警察伤亡,具有十 分重要的作用。
徒手防卫与控制技术使用的法律依据:
《公安机关人民警察现场制止违法犯罪行为 操作规程》明确了警察在现场制止违法犯罪 行为可采取的强制手段由轻到重依次为:口 头制止、徒手制止、使用警械制止、使用武 器制止。(第一章第四条、第五条、第十条、 第三章第十九条、第二十条、第二十一条、 二十二条)
基本站位、步法和身法
3、左移步闪身:原地保持基本站位,左脚向左侧 移动半步,以左脚为轴心,身体右转90°,右脚顺势绕 动。反顺序回原位。
4、右移步闪身:原地保持基本站位,右脚向左侧 移动半步,以右脚为轴心,身体左转90°,左脚顺势绕 动。反顺序回原位。
三、戒备姿势
1、搭手戒备:左右手叠放在自己腹前, 左手在上轻握右手腕,右手在下置于腹前,两 手小臂微上抬,目视前方,神态自然。(对现 场危险评估后采用的一种较低级别的戒备)
提膝防守图示
五、基本反击技术
(一)掌根震击:不同于一般意义上的击打, 首先使用攻击的“武器”不是坚硬的拳头,而是肉 掌根部,既有一定的力度又不易给对方造成硬伤; 其次,掌根震击动作幅度小,不是快速的长距离的 击打和推动,而是接触部位后的震击,目的是令对 方受到震动而停止,不是简单的发力推动;再次, 掌根击打的部位不同,如果击中的是有效部位,不 会给对方造成伤害,但能使对方感到瞬间的痛楚。 掌根震击一般是在现场情况较为复杂混乱,警察急 需拉开距离或者摆脱时所必须掌握的技巧。
手部肌肉参考PPT

手部肌肉
从肌腱起始至腕管近端,即前臂下1/3处。此 区屈肌腱,有腱周组织及周围软组织保护, 粘连机会少。屈肌腱在此区损伤,应全部作 Ⅰ期缝合,效果常较好。但在多条屈指深浅 肌腱断裂时,要避免吻合口在同一平面,以 减少粘连。
11
二、手掌的解剖
手掌
腕前区 鱼际 小鱼际 掌心
(一)手掌的浅层结构 1.皮肤和浅筋膜 腕前区的皮肤和浅筋膜薄而松弛,滑动性好; 掌部皮肤厚而紧张坚韧,角化层厚。鱼际和小鱼际的浅筋膜较薄、 掌心的浅筋膜致密,并有纤维隔将皮肤连于掌腱膜,分割皮下组织成无数小叶,浅的 血管、淋巴管和神经穿行其中。
29
1)掌中间隙—— 位于掌中间鞘尺侧半的深面,在第3~5指屈肌腱、第2~4蚓状肌与 骨间掌侧筋膜之间, 内侧为掌内侧肌间隔,外侧为掌中隔。 间隙近端位于屈肌总腱鞘深面,经腕管与前臂屈肌后间隙相通。 远侧端经第2~4蚓状肌达指蹼间隙,通手背。
30
2)鱼际间隙—— 位于掌中间鞘桡侧半的深面, 在掌中隔、外侧肌间隔和拇收肌筋膜之间。
8
手部肌肉
腕横韧带远侧至肌腱进入腱鞘之前的区域。 手掌内深肌腱的桡侧有蚓状肌附着,断裂后 限制近端肌腱回缩。在蚓状肌区深浅肌腱同 时断裂,可以同时吻合,用蚓状肌包裹深肌 腱,防止与浅肌腱粘连。蚓状肌至腱鞘段, 仅吻合深腱,切除浅腱。
9
手部肌肉
九条肌腱及正中神经挤在腕管内,空间较小, 正中神经浅在,常与肌腱同时损伤。处理时 应切开腕横韧带,仅缝合深肌腱及拇长屈肌 腱,切除浅肌腱,以增大空隙。吻合口应不 在同一平面。必须同时吻合正中神经。
26
2)中间鞘 由掌腱膜、掌内外侧肌间隔、骨间掌侧筋膜和拇收肌筋膜围成。 内有指浅、深屈肌腱及屈肌总腱鞘、蚓状肌以及掌浅弓、 指血管和神经
垂直三关节手臂ppt课件

福建省长泰县第一中学七年级英语上册《Unit 1 My name’s Gina》习题精编14 人教新目标版B. Write the time and telephone numbers in English. (用英语表示下列时间和电话号码)Example(例):—What time is it in Beijing? —It’s eleven o’clock.1. —What time is it in London? —It’s _______ o’clock.2. —What time is it in Paris? —It’s _______ o’clock.3. —What time is it in New York? —It’s _______ o’clock.4.865-9127 _______ ________ ________ ________ ________ ________ ________C. Fill in the blank according to the meaning of the sentence and the first letter given. (根据句意及首字母填词)1. My name’s Alan Green. My f_________ name is Alan.2. His name’s Tom Miller. His f_________ name is Miller.3. Her name’s Linda Hand. Her l_________ name is Hand.4. That girl is from (来自) the US. H_________ name is Mary.5. I’m Jenny. Nice to m_________ you.6. My telephone n_________ is 586-5901.7. This is my ID c_________.8. Please answer my q_________, Jim.9. —What’s y_________ name? —My name’s Nick.10. —What’s your p_________ number, Nick? —It’s 579-0832.II. Multiple choice (单项选择) (10分)( )1. —Hello, Linda. I’m Jim. ______. —Nice to meet you, too.A. How are youB. Nice to meet youC. Hello( )2. —What’s your name? —______ name’s Jack Smith.A.MyB. YourC. His( )3. —What’s her family name? —It’s _______.A.Mary BrownB. MaryC. Brown( )4. I ______ Tony. What’s your name?A.isB. amC. are( )5. —What’s your telephone number, Nick? —______ 885-7348.A.ItsB. ItC. It’s( )6. —What’s his telephone number? —______ telephone number is 557-0752.A.MyB. HisC. Her( )7. Alan, please answer my ______.A.questionB. numberC. name( )8. How ______ your mother, Linda?A. isB. amC. are( )9. His name is Bill Gates. We call him ______.A. Mr BillB. Mr GatesC. Mrs Gates( )10. —What’s her name? — ______ name is Jenny White.A.HerB. ItsC. HisIII. Communication (情景交际) (A部分5分,B部分10分,共15分)A. Match the sentences. (从II栏中找出I 栏的正确答语)I II( )1. Hello. I’m Mike. A. Hello, Mary. I’m Jenny.( )2. My name’s Tom. B. I’m Jack.( )3. Hello, I’m Mary. C. It’s 821-8403.( )4. What’s your name? D. Nice to meet you, Mike( )5. What’s your telephone number, Dale? E. Nice to meet you, TomB. Fill in the blanks with the choices given in the box. (把方框中所给的选项填入对话中适当的空白处)Jim: Hello! My name’s Jim. 1 ?Jim: Nice to meet you, too. 3 , Rose?Rose: My family name’s Bush.Jim: 4 ?Rose: It’s B-U-S-H. Rose Bush.Jim: That’s an interesting(有趣的)5 ?Rose: Yes. It’s 5575-9032.Jim: Thank you. It’s nice talking(谈话) to you, Rose.Rose: Nice talking to you, too.IV. Fill in the blanks with the given words in the box. (用方框中的单词填空) (10分)Bob: My name (1) __________ Bob.Gina: (2) __________, Bob. I’m Gina.Bob: Nice to (3) __________ you, Gina. What’s your (4) __________ name? Gina: (5) __________ Miller. What’s (6) __________ last name?Bob: It’s Green. My full(完全的) name’s Bob Green. What’s your (7) __________ number, Gina?Gina: It’s 8876-4021. And your telephone (8) __________, Bob?Bob: It’s 5793-8216. What’s that girl’s name, Gina?Gina: (9) __________ name’s Linda. What’s that boy’s name?Bob: (10) __________ name’s Tony.V. Reading (阅读理解) (20分)AGrace: Excuse me!Li Lin: Yes?Grace: Where(哪里) is Class 2, Grade 1?Li Lin: Are you a new(新的) student(学生)?Gr ace: Yes, I’m in Class 2, Grade 1.Li Lin: Oh, really(真的)? So we are in the same(相同的) class. My name’s Li Lin.Nice to meet you.Grace: Nice to meet you, too. I’m Grace.Li Lin: Where’re you from?Grace: I’m from the US(美国). My parents(父母) are English teachers in No. 4 Middle School(中学)in Beijing.Li Lin: Really? That’s a nice school. Can(能) you speak(说) Chinese?Grace: Yes, I can.Li Lin: Oh, it’s time(时间) for class. Please follow(跟着) me.Grace: OK.Write “T” or “F” according to the dialogue. (根据对话内容,判断正(T)误(F)) ( )1. Grace is English.( )2. Grace is a new student in Class 1.( )3. Li Lin is in Class 2, Grade 1.( )4. Grace’s father is an English teacher in Beijing.( )5. Grace can speak Chinese.BHi! My name is Zhang Hua. I’m Chinese. My English name is Richard. I’m fourteen. I’m a student in No. 69 Middle School in Harbin. It’s a nice and big school. I’m in Class Four, Grade Two. My phone number is 8865-9713. My hobbies(爱好) are swimming(游泳) and reading(读书). My favorite(最喜欢的) color is orange(桔色的).VI. Translation and writing (翻译与写作) (A部分5分,B部分10分,共15分)A. 汉译英1. 我叫汤姆,你叫什么名字?__________________________________________________________________________2. —他的电话号码是多少?—是789-5460。
人体主要关节.ppt
屈
即向前弯,两手着地,整个腰背。部成一均匀的弧形线, 屈可达到90
伸 。
即后仰,主要动作在腰椎部分,可达到30
侧屈
。
。
两手抱枕部,然后向左右弯曲,两侧均可达到20 ~30
旋转
双手抱枕部,骨盆与两足固定不动,
。
然后作左右旋转动作,两侧均可达到30
肩 关节 运 动 范 围
中立位
即上臂自然下垂,贴近胸侧
。
外旋位外展上举:即上臂外旋外展上举可达180 。
。
水平位前屈:即上臂抬高水平位前屈,可达135 。
。
。
水平位后伸:即上臂抬高水平位后伸,可达(40 ~50 )。
。
。
内旋:上臂内旋肩关节可达45 ~70 。
。
。
外旋:上臂外旋肩关节可达45 ~60 。
肘 关节运动范围
中立位:即上臂与前臂成一直线。
旋转:关节绕其轴运动或移动, 其中向身体前方旋转为内旋,向 身体后方旋转为外旋。
但在上肢,屈肘90°、前臂置于 体侧时,前臂旋转而使手掌朝下 称旋前,使手掌朝上称旋后。
在下肢,足向内旋转,足底倾向 于面对内侧称为内翻;足向外旋 转,足底倾向于面对外侧称为外 翻。
▪ 骨伤后要进行整复、固定,一般要求将伤 肢固定于功能位。那么,什么叫肢体的功 能位?肢体的功能位是指关节强直固定后能 发挥最大功能的位置,功能位是相对的。 如肘关节固定在90度时,便于写字等工作, 但不便于拿锄头劳动。髋关节行走及站立 的功能位是直伸位,但坐下的功能位是屈 至90度。所以功能位应根据患者的年龄、 性别、职业等因素综合考虑。
髋关节运动范围
中立位
平卧位,腰不过分前凸,两侧髂前上棘在同一水平线上, 下肢自然伸直,髌骨向上。
《运动解剖学》上肢关节
桡腕关节(一)
❖ 关节组成:桡腕关节面、关节盘+手舟骨、月骨、三角骨 ❖ 关节类型:椭圆关节 ❖ 关节运动:屈伸、收展、环转 ❖ 关节特点:借关节盘与桡尺远侧关节相隔,两侧有侧副韧带
桡腕关节(二)
腕掌关节
❖ 关节组成:
远侧列腕骨+五块掌骨底
关节 ➢ 肩锁关节
❖ 自由上肢关节
➢ 肩关节 ➢ 肘关节 ➢ 桡尺关节 ➢ 桡腕关节 ➢ 腕掌关节 ➢ 掌指关节 ➢ 指间关节
胸锁关节
❖ 关节组成:
锁骨的胸骨端+胸骨 的锁切迹
❖ 关节类型:
球窝关节
❖ 关节运动:
前后、上下、旋转和 环转
肩锁关节
❖ 关节组成:锁骨的肩峰关节面+肩胛骨的肩峰关节面 ❖ 关节类型:平面关节 ❖ 关节运动:运动幅度很小
肩关节
❖ 关节组成:肱骨肱骨头+肩胛骨的关节盂 ❖ 关节类型:球窝关节 ❖ 关节运动:各种运动 ❖ 关节特点:有关节盂、为最灵活的关节
肘关节
❖ 关节组成、类型及运动:
肱尺关节——肱骨滑车+尺 骨滑车切迹,为屈戍关节, 可作屈伸运动。
桡尺近侧关节——桡骨环状 关节面+尺骨桡切迹,为车 轴关节,可作旋转运动。
❖ 关节类型:
拇指腕掌关节----鞍状关节 第2∼5腕掌关节----平面关节
❖ 关节运动:
拇指腕掌关节可作屈伸、 收展和环转运动;第2∼5腕掌 关节只能作轻微的滑动
掌指关节和指间关节
掌指关节
❖ 关节组成:掌骨头+近节指骨底 ❖ 关节类型:球窝关节 ❖ 关节运动:屈伸、收展、环转
指间关节
❖ 关节组成:指骨头+指骨底 ❖ 关节类型:屈戍关节 ❖ 关节运动:屈伸
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S1C2a2
S2a21d1
29.06.2020
.
4
第四章 位置运动学
手臂变换矩阵
AA1A2A3
A 11 C 1 C 2C 3C 1S2S3
A 2 4 S 1 C 2 C 3 a 3 S 1 S 2 S 3 a 3 S 1 C 2 a 2
A 12 C 1 C 2S3C 1S2C 3 A13 S1
29.06.2020
.
6
第四章 位置运动学
[2] 1 2 0 3 900
X3
Y1
Y2
Y3
Y1
Z1 d1 Z0
Y3
Z3 a3
θ3
Y2
X1 a2
X2
Z2
Y0
X0
X1 a2 Z1
X2 a3
X3
Z2
Z3
d1 Z0 Y0
X0
0 1 0 a2
A 0 0 1
0
1 0 0 0
0 0
d1
1
a3
29.06.2020
A 31S2C 3C2S3
A 32S2S3C 2C 3
A 1 4 C 1 C 2 C 3 a 3 C 1 S 2 S 3 a 3 C 1 C 2 a 2 A33 0
A 21 S1C 2C 3S1S2S3
A 3 4 S 2 C 3 a 3 C 2 S 3 a 3 S 2 a 2 d 1
A 22 S 1 C 2S3S 1S2C 3
明显。 6 通过变换矩阵可以很容易求解运动学正问题。
29.06.2020
.
9
《机器人原理与应用》
The end
Thanks for your attention
29.06.2020
.
10
A1
S1
0
0
0 1 0
C1 0 0
0
d1 1
C2 S2 0 C2a2
A2
S2
0
C2 0
0
S2a2
1 0
0
00
1
进而计算
C3 S3 0 C3a3
A3
S3
0
C3 0
0
S3a3
1 0
0
0
0
1
C1C2
A1A2
S1C2
S2 0
C1S2 S1S2
C2 0
S1 C1
0 0
C1C2a2
《机器人原理与应用》
垂直三关节手臂 习题解
徐心和 郝丽娜 丛德宏
东北大学人工智能与机器人研究所
29.06.2020
.
1
第四章 位置运动学
习题:试列写垂直三关节手臂运动学方程
a2 d1
a3
问题分析: 1.坐标系建立 2.各关节D-H参数 3.各关节变换矩阵 4.手臂运动学方程 5 . 分析验证相互关系
.
7
第四章 位置运动学
[3]
X3
12 3900 Y1
Y2
Y3
θ3
Y2 a3 Z3 Y3
X2 Z2
θ2 a2 Y1 X1
Z1
d1 Z0
Y0 θ1
X1 a2 Z1
X2 a3
X3
Z2
Z3
d1 Z0 Y0
X0
0 0 1 0
A 1 0 0
a3
0
1 0
0 0
d1
1
a2
X0
29.06.2020
A23C1
A 41A 42A 430 A44 1
29.06.2020
.
5
第四章 位置运动学
[1] 原始位置的变换矩阵
θ1 = 0 θ2 = 0 θ3 = 0
Y1
X1 a2 Z1
d1 Z0 Y0
X0
Y2
Y3
X2 a3
X3
Z2
Z3
1 0 0 a2 a3
A 0 0 1
0
0 1 0 0 0 0
d1 1
.
8
第四章 位置运动学
几点体会:
1 基坐标 X0Y0Z0 始终固定不动。 2 可以任意定义关节零位和各关节坐标系,最终
结果相同,但对分析计算影响重大。必须谨慎 选择。
3 角 i 相对于 Z i1 轴运动。而关节的效应体现
在本关节前端的动坐标,一般为下一个关节的 轴心。
5 手坐标姿态用方向余弦阵 n , o , a 表示,特征
29.06.2020
.
2
第四章 位置运动学
坐标系建立
Y1
X1 a2 Z1
d1 Z0 Y0
X0
Y2
Y3
X2 a3
X3
Z2
Z3
D-H参数:
1 23
i 1 2 3 ai 0 a2 a3 di d1 0 0 i 90 0 0 0
29.06.2020
.
3
第四章 位置运动学
各关节变换矩阵
C1 0 S1 0