Chap41轨迹预处理资料
chapt(精)

矩阵分析及其应用3.1 矩阵序列定义3.1 设矩阵序列{A (k)},其中A(k)=()(k ij a )∈C m ⨯n ,当k →∞, )(k ij a →a ij 时,称矩阵序列{A (k)}收敛,并称矩阵A=(a ij )为矩 阵序列{A (k)}的极限,或称{A (k)}收敛于A, 记为A A k k =∞→)(lim 或 A (k)→ A 不收敛的矩阵序列称为发散的。
由定义,矩阵序列A (k) 发散的充要条件为存在ij 使得数列)(k ij a 发散。
类似地,我们可以定义矩阵收敛的Cauchy 定义定义3.1' 矩阵序列{A (k)}收敛的充要条件为对任给ε>0 存在N(ε), 当 k , l ≥ N(ε) 时有||A (k)-A (l )|| < ε其中||.||为任意的广义矩阵范数。
例1 ⎪⎪⎪⎪⎭⎫ ⎝⎛-=∑=-n k n n k k e n n 12)()sin()1sin(11A 如果直接按定义我们因为求不出A (n )的极限从而很难应用定义3.1证明收敛。
相反,由于∑∑∑+=+=+=-≤≤n m k n m k n m k k k k k k 11212)1(11)sin( < 1/m 从而只要l 充分大,则当m, n > l 时就有ε≤∑+=n m k k k 12)sin( 这样A (l ) 收敛。
定理3.1 A (k)→ A 的充要条件为||A (k) -A||→0证明:利用广义矩阵范数的等价性定理,仅对∞范数可以证明。
即 c 1 ||A (k) -A||∞ ≤ ||A (k) -A||≤ c 2 ||A (k) -A||∞ 性质0 若A (k)→ A , 则 ||A (k)|| → ||A|| 成立。
性质1. 设A (k)→ A m ⨯n ,B (k)→ B m ⨯n , 则α⋅ A (k)+β ⋅ B (k) → α⋅ A+β ⋅ B , ∀ α,β∈C性质2. 设A (k)→ A m ⨯n ,B (k)→ B n ⨯l , 则 A (k) ⋅B (k)→ A ⋅B证明:由于矩阵范数地等价性,我们可以只讨论相容的矩阵范数。
轨迹数据预处理技术

轨迹数据预处理技术
轨迹数据预处理技术是指在对轨迹数据进行分析和挖掘之前,对原始轨迹数据进行清洗、过滤、转换等一系列处理操作的技术。
其目的是提高后续轨迹数据分析和挖掘的效率和准确性。
轨迹数据预处理技术主要包括以下几个方面:
1. 数据清洗:由于采集设备或传输过程中存在误差,轨迹数据中可能存在噪声、异常点等不合理的数据。
因此需要进行数据清洗,去除这些不合理的数据,保证后续分析的准确性。
2. 数据过滤:针对特定应用场景,需要对轨迹数据进行过滤,去除一些无用信息。
例如,在交通监测中可以只保留汽车行驶时产生的轨迹信息,而去除停车或倒车时产生的信息。
3. 数据转换:将原始轨迹数据转换为符合特定应用场景需求的格式。
例如,在地图应用中需要将GPS坐标转换为地图上的像素坐标。
4. 数据压缩:由于原始轨迹数据量较大,需要对其进行压缩以节省存储空间和提高处理效率。
常见的压缩方法包括抽稀、分段、曲线拟合等。
5. 数据融合:将多个来源的轨迹数据进行融合,得到更全面、更准确的信息。
例如,在交通监测中可以将不同车辆的轨迹数据进行融合,得到整个路段的交通状况。
总之,轨迹数据预处理技术是轨迹数据分析和挖掘的基础,对于提高后续处理效率和准确性具有重要意义。
密集杂波环境下的航迹起始

实验仿真
100 90 80 70
y方 向 上 的 距 离
1-33 1-1 1-41 1-9 1-24 1-53 1-32 1-19 1-26 1-40 1-45 1-10 1-47 1-52 1-31 1-17 1-25 1-23 1-54 1-12 1-3 1-13 1-43 1-18 1-15 1-22 1-2 1-50 1-36 1-42 1-34 0 10 1-38 20 30 1-44 1-28 1-16 1-5
2-18 1-49 1-28 2-33 2-38 2-6 1-16 1-30 1-51 1-7 1-14 80
2-43
40 50 60 x方 向 上 的 距 离
70
90
0
70
90
100
100
1-33 2-48 3-26 3-42 1-37 2-28 1-10 2-13 1-1 2-44 1-47 1-41-29 3-14 2-47 90 3-22 3-6 2-1 2-29 1-41 1-52 2-4 3-17 2-37 3-1 3-52 3-4 3-47 1-31 1-40 3-37 3-36 2-21 2-25 3-18 80 3-44 2-22 1-45 1-17 3-53 2-11 1-9 2-14 1-39 1-25 3-11 3-38 3-27 70 3-8 1-24 3-31 2-7 3-40 1-23 3-43 2-23 2-31 3-16 2-10 3-15 60 1-21 2-32 1-53 3-3 1-12 3-19 2-30 1-54 2-3 1-32 2-26 1-8 1-19 3-41 2-201-3 3-34 3-12 2-19 3-28 50 3-24 2-15 3-13 2-35 3-29 1-13 1-26 3-45 2-16 2-17 1-35 2-42 2-45 3-46 1-46 1-52-53-5 40 1-43 3-51 2-24 2-9 2-27 1-15 3-7 1-18 2-43 2-18 2-34 30 3-2 1-22 1-49 1-44 1-28 3-21 2-39 2-41 2-36 2-2 1-2 2-33 20 3-9 2-38 2-6 2-46 3-20 2-8 1-48 3-50 2-40 3-25 1-20 1-16 1-30 3-39 3-49 1-50 1-51 1-11 1-36 10 3-35 1-42 1-27 3-48 2-12 1-34 1-6 3-33 3-30 3-54 1-7 3-32 3-10 3-23 1-14 1-38 0 2-49 2-54 2-53 2-52 2-51 2-50 0 10 20 30 40 50 60 70 80 90 100 x方 向 上 的 距 离
chap 5 数据与预处理

Goal is to find a projection that captures the largest amount of variation in data
x2 e
x1
Dimensionality Reduction: PCA
Find the eigenvectors of the covariance(协方差) matrix The eigenvectors define the new space
Handling missing values
– – – – Eliminate Data Objects Estimate Missing Values Ignore the Missing Value During Analysis Replace with all possible values (weighted by their probabilities)
Sampling …
The key principle for effective sampling is the following: – using a sample will work almost as well as using the entire data sets, if the sample is representative – A sample is representative if it has approximately the same property (of interest) as the original set of data
Equal frequency
K-means
Euclidean Distance
实验轨迹分析报告

实验轨迹分析报告1. 引言本报告对实验轨迹进行了分析,旨在探索轨迹的特征和有价值的信息。
轨迹数据是记录实体在一段时间内移动路径的数据,广泛应用于交通流分析、个体行为研究和定位服务等领域。
通过对轨迹数据进行分析,可以了解个体的行为规律、预测未来的行动趋势以及发现异常情况。
2. 数据收集与预处理轨迹分析需要准确且完整的轨迹数据作为基础。
本实验采用了GPS设备对一组个体进行了轨迹记录。
首先,我们收集到了原始的GPS数据,并进行了预处理。
预处理的步骤包括:1.数据清洗:去除掉无效的GPS数据点,例如异常坐标、速度为零的点等。
2.数据对齐:由于GPS设备的不准确性,轨迹数据可能存在一定的偏移。
我们使用了对齐算法对轨迹数据进行了校正。
3.数据插值:由于GPS记录的时间间隔不均匀,我们对轨迹数据进行了插值处理,使得时间间隔均匀。
经过预处理后,我们得到了干净、准确的轨迹数据,为后续的分析提供了可靠的数据基础。
3. 轨迹特征分析在轨迹数据中,我们可以提取出一些重要的特征,以揭示个体的行为规律。
具体的特征包括:1.轨迹长度:表示轨迹的总长度,反映了个体的移动范围。
2.平均速度:表示个体在轨迹中的移动速度。
3.最大速度:表示个体在轨迹中的最大移动速度。
4.轨迹方向:表示个体在轨迹中移动的方向分布。
通过对轨迹特征的分析,我们可以对个体的行为规律进行初步的了解,并为后续的分析提供参考。
4. 轨迹聚类分析轨迹聚类是将轨迹数据划分为不同的群组,使得同一群组内的轨迹相似度较高,不同群组之间的轨迹相似度较低。
轨迹聚类可以帮助我们发现不同类别的行为模式,并进一步研究其特征和规律。
在本实验中,我们采用了基于密度的聚类算法对轨迹数据进行聚类。
通过实验,我们得到了一组不同的聚类簇,每个簇表示一种行为模式。
进一步的分析发现,不同簇之间存在明显的差异,证明了轨迹聚类的有效性。
5. 轨迹异常检测轨迹异常检测可以帮助我们发现异常行为或异常情况。
程佩青数字信号处理第三版笔记
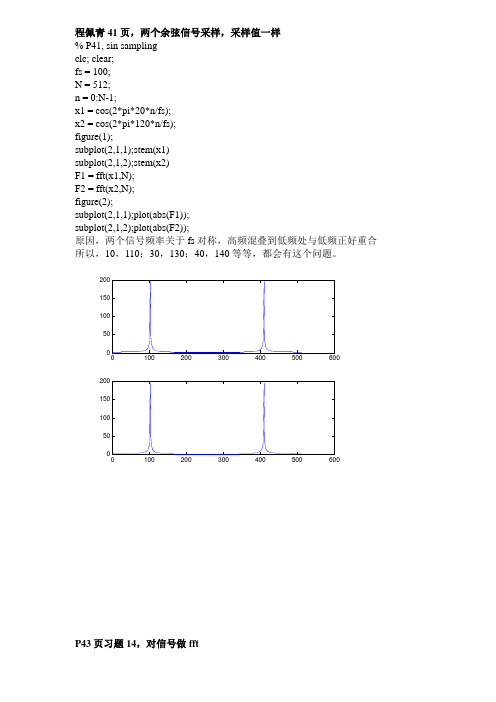
程佩青41页,两个余弦信号采样,采样值一样% P41, sin samplingclc; clear;fs = 100;N = 512;n = 0:N-1;x1 = cos(2*pi*20*n/fs);x2 = cos(2*pi*120*n/fs);figure(1);subplot(2,1,1);stem(x1)subplot(2,1,2);stem(x2)F1 = fft(x1,N);F2 = fft(x2,N);figure(2);subplot(2,1,1);plot(abs(F1));subplot(2,1,2);plot(abs(F2));原因,两个信号频率关于fs对称,高频混叠到低频处与低频正好重合所以,10,110;30,130;40,140等等,都会有这个问题。
01002003004005006000100200300400500600% p43, exercise14clc; clear;fs = 3000;N = 512;n = 0:N-1;x = ( 1+cos(2*pi*100*n/fs) ).*cos(2*pi*600*n/fs);F = fft(x,N);plot(abs(F)); ylabel('|X(k)|'); xlabel('k');010*******400500600020406080100120140160180200|X (k )|k三个峰值分别对应500,600,700Hz ,对应k 值分别为86103120计算方法:采样间隔:Ts = 1/fs;信号持续时间:T = Ts*N频域分辨率为:F = 1/T; 每个k 代表的频率值,K1 = f1/F=K2 = f2/F=K3 = f3/F=Ps :在使用data cursor 时候,我们会发现,每次只能显示一个点的数据,当需要显示多个点的时候就会觉得很不方便。
告诉大家一个小窍门,当你选择data cursor 工具时,按住alt 键,点左键选择曲线上的点。
轨迹数据预处理方法综述

轨迹数据预处理方法综述作者:蔡郑贾利娟孙扬清来源:《电脑知识与技术》2020年第31期摘要:随着大数据技术的发展和移动终端设备的普及,大量轨迹数据得以被采集并存储到互联网上。
现今较易获得的轨迹数据使其越来越受到研究者的关注,由于这些原始的轨迹数据受到采样频率、采样精度以及法律法规的影响,而通常不能直接应用到各类挖掘算法中,因此通常需要先进行预处理。
该文对轨迹数据的预处理进行了综述。
首先,介绍了轨迹数据的概念和用途;其次,总结了轨迹数据的常见特征;再次,归纳了常用的轨迹数据预处理方式;最后,论述了轨迹数据处理面临的挑战并对未来研究方法进行了展望。
关键词:轨迹数据;预处理;滤波;geohash;停留点中图分类号:TP311 文献标识码:A文章编号:1009-3044(2020)31-0009-04Abstract:With the development of big data technology and the popularization of mobile terminal devices, a large amount of trajectory data can be collected and uploaded to the internet.In recent years,more and more scholars pay attention to the trajectory data easy to be obtained. These original trajectory data affected by sampling frequency, sampling accuracy and laws and regulations, can not be directly applied to various mining algorithms, so, pretreatment is usually needed first. This paper reviews trajectory data pretreatment. Firstly, the concept and application of trajectory data are introduced. Secondly, the common characteristics of trajectory data are summarized. Thirdly, the common track data pretreatment methods are summarized. Finally, the challenges of trajectory data pretreatment are discussed and the future research methods are prospected.Key words:trajectory data;pretreatment;filter;geohash;stopping point近些年来,随着移动终端设备的普及、社交网络的兴起以及4G技术的广泛运用,轨迹数据被大量采集并存储到互联网上。
航迹片段关联及优化

1 弹道目标被动段滤波模型
弹道目标的作战窗口一般在被动段( 也有文 。因此本文的 献将它细分 为 自 由 段 与 再 入 段) 滤波 模 型 主 要 针 对 弹 道 目 标 的 被 动 段, 用f 表示。
;退修日期 : ;录用日期 : ;网络出版时间 : 收稿日期 : 2 0 1 1 0 1 1 8 2 0 1 1 0 2 2 3 2 0 1 1 0 6 1 9 2 0 1 1 0 6 2 7 1 7∶3 3 - - - - - - - - / / / : : / 网络出版地址 : w w w. c n k i . n e t k c m s d e t a i l 1 1. 1 9 2 9. V. 2 0 1 1 0 6 2 7. 1 7 3 3. 0 0 1. h t m l D O I C N K I 1 1 1 9 2 9 V. 2 0 1 1 0 6 2 7. 1 7 3 3. 0 0 1 - ) 基金项目 :航天科技创新基金 ( C A S C 0 2 0 2 3 - : : T e l . 0 4 5 1 8 6 4 1 8 0 5 1 7 0 6 a i l l i u m e i i t . e d u . c n - - E -m @h * 通讯作者 .
1 8 9 8
航 空 学 报
O c t . 2 5 2 0 1 1V o l . 3 2N o . 1 0
由于 重 力 在 地 心 固 连 坐 标 系 ( E a r t h C e n - - ,E 本 t e r e d E a r t h F i x e d C E F)下 表 达 式 简 单 , - 文涉及 到 的 导 弹 质 心 动 力 学 方 程 均 建 立 在 但E 需 E C E F坐标系下, C E F不是惯 性 坐 标 系, 利用科里奥利定理 对牛顿第二定律进行修正, 可得
数字信号处理第三版课件第一章
x(n)
3 2 11
-4 -3 -2 -1 0 1 2 3 4 5 6 n
3 x(-n)
2 1
-4 -3 -2 -1 0 1 2 3 4 5 6 n
x(n)
3
3
3
2
2
2
…1
1
1
…
-4 -3 -2 -1 0 1 2 3 4 5 6 n
-4 -3 -2 -1 0 1 2 3 4 5 6 n
2
x(n)= (n) +2(n-1)+3(n-2) x(m) (n m)
3 2
m0
1
(其中,x(0)=1, x(1)=2, x(2)=3)
-4 -3 -2 -1 0 1 2 3 4 5 6 n
2、单位阶跃序列u(n) -Unit step sequence
❖ x(mn) 为抽取序列(m>1) ❖ x(n/m)为插值序列(m<1)
例如:x(n)与x(2n)
x(n)
2 1
5 4 3
-2 -1 0 1 2
n
x(2n)
5
3
1
-2 -1 0 1 2
n
注意:
x(n) = x(t)|t=nT x(2n) = x(t)|t=2nT x(n/2) = x(t)|t=nT/2
❖ 一般,采样间隔是均匀的,用x(nT)表示离散时间信号在nT 点上的值,n为整数。由于x(nT)顺序存放在存储器中,我们通 常直接用x(n)表示离散时间信号-序列。
x(t)|t=nT=x(nT)
…… 0 T 2T 3T 4T 5T 6T 7T 8T 9T ……
轨迹数据预处理流程

轨迹数据预处理流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!轨迹数据预处理流程轨迹数据预处理流程:一、数据清洗1.1 数据去重1.2 异常值处理二、数据转换2.1 数据格式转换2.2 数据投影变换三、数据插值3.1 线性插值3.2 三角形插值四、数据平滑4.1 高斯滤波4.2 中值滤波五、数据聚合5.1 时间聚合5.2 空间聚合总结:轨迹数据预处理是提高数据质量、挖掘轨迹数据价值的重要步骤。
轨迹数据预处理技术

轨迹数据预处理技术1. 引言轨迹数据预处理是指对移动对象的轨迹数据进行清理、转换和分析,以便后续的轨迹数据挖掘和应用。
随着移动设备和位置服务的普及,大量的轨迹数据被收集并应用于交通管理、城市规划、个性化推荐等领域。
然而,原始的轨迹数据通常存在噪声、缺失和冗余等问题,因此需要进行预处理来提高数据质量和可用性。
本文将介绍轨迹数据预处理技术的基本概念、常见方法和应用案例,并讨论其在实际应用中的挑战和未来发展方向。
2. 轨迹数据预处理方法2.1 数据清理数据清理是指对轨迹数据中的错误、异常或无效信息进行识别和修复。
常见的清理方法包括:•去除重复点:由于采样频率限制或设备误差,轨迹数据中可能存在相邻点之间位置相同或非常接近的情况,这些点可以被视为重复点并去除。
•去除离群点:通过统计分析或聚类算法检测距离其他点较远的点,并将其视为离群点进行去除。
•去除噪声:通过滤波算法或平滑技术去除轨迹数据中的噪声,如抖动或突变。
2.2 数据转换数据转换是指将原始轨迹数据转换为适合特定分析任务的形式。
常见的转换方法包括:•坐标系转换:将轨迹数据从经纬度坐标系转换为平面坐标系,以便于距离计算和空间分析。
•时间戳处理:根据需要,可以将时间戳调整为统一格式、时区或单位,以方便后续时间序列分析或模型建立。
•距离计算:根据轨迹数据的空间属性,可以计算相邻点之间的欧氏距离、曼哈顿距离或地理距离等,并加入到数据中作为特征。
2.3 数据分析数据分析是指对预处理后的轨迹数据进行统计和挖掘。
常见的分析方法包括:•轨迹聚类:将相似的轨迹归为一类,以发现移动对象之间的行为模式和规律。
•轨迹匹配:将实际轨迹与参考轨迹进行匹配,以确定移动对象的路径和行为。
•轨迹预测:基于历史轨迹数据,利用机器学习或时间序列模型预测未来的移动轨迹。
3. 轨迹数据预处理的应用案例3.1 交通管理轨迹数据预处理在交通管理中起着重要作用。
通过对出租车、公交车等交通工具的轨迹数据进行清理和分析,可以实时监测交通流量、拥堵情况和出行需求,为城市交通规划和调度提供决策支持。
复杂约束下飞行器轨迹快速优化设计

申请学位级别: 工学硕士 学 科 、 专 业: 控制科学与工程 所 在 单 位: 控制理论与制导技术研究中心 答 辩 日 期: 2010 年 7 月 授予学位单位: 哈尔滨工业大学
Classified Index:TP273 U.D.C.: 681.52
Dissertation for the Master Degree in Engineering
RAPID TRAJECTORY OPTIMIZATION FOR FLIGHT VEHICLES WITH COMPLEX CONSTRAINTS
Candidate: Supervisor: Deputy Supervisor: Academic Degree Applied for: Specialty: Date of Oral Examination: University:
Xia Meng Prof. Duan Guangren Jiang Canghua Master of Engineering Control Science and Engineering July, 2010 Harbin Institute of Technology
哈尔滨工业大学工学硕士学位论文
-I-
哈尔滨工业大学工学硕 thesis aims to optimize the reentry trajectory for a new style of glide-reentry vehicles in the phase of scheme design. In the reentry process of such vehicles, the range of altitude and velocity is very large and the strict constraints in heating protection and overload, as well as the high sensitivity to the control variables for the hypersonic reentry trajectory bring the challenge of this research. Rapid trajectory optimization can handle emergency easily and therefore is of great research value. The main work of this thesis can be described as follows: At first, longitudinal point-mass dynamics of a flight vehicle are derived based on some assumptions. Then, lift and drag models are built according to the data of some Common Aero Vehicle. After that, we analyze the constraints of overload and heating rate which must be considered in the reentry process. At last, an optimal control problem is formulated to maximize the flight range based on a dimensionless model description. In the second place, we discuss the similarity and difference of several pseudospectral methods based on Legendre polynomials. According to the practical problem we are trying to solve, we focus on the principles of Legendre pseudospectral method and how to solve an optimal control problem using this method. Furthermore, the trajectory optimization problem we obtained before is transformed to a normalized nonlinear programming problem through the Legendre pseudospectral method. We use MATLAB as a powerful tool to solve the constrained nonlinear programming problem, which applies the Sequential Quadratic Programming when solving medium-scale problems. Simulations demonstrate the effectiveness of this algorithm. Some preliminary analysis is presented too. Finally, we optimize the multiple-stage reentry trajectory in order to increase the accuracy while not to increase unnecessary computational burden. The original trajectory is segmented at some points with specific energy. By comparing trajectories without segments, trajectories with two segments and trajectories with three segments, conclusion can be drawn that multiple-stage optimization can increase the flight range with high computation efficiency and precision. Keywords:trajectory optimization; optimal control; Legendre pseudospectral method; reentry; hypersonic vehicle
基于轨迹段DBSCAN的船舶轨迹聚类算法

基于轨迹段DBSCAN的船舶轨迹聚类算法江玉玲; 熊振南; 唐基宏【期刊名称】《《中国航海》》【年(卷),期】2019(042)003【总页数】5页(P1-5)【关键词】船舶轨迹; 分段; 相似度度量; DBSCAN; 轨迹聚类【作者】江玉玲; 熊振南; 唐基宏【作者单位】集美大学诚毅学院厦门361021; 集美大学航海学院厦门361021【正文语种】中文【中图分类】U675.7随着海上经济的发展,海洋运输已成为国内外货物运输的最重要方式之一,越来越多的船舶投入到海洋运输当中,沿海以及港口附近的船舶密度越来越大,船舶交通状况越来越复杂,这给船舶交管部门的管理带来很大的麻烦。
船舶自动识别系统(Automatic Identification System, AIS)是获取船舶运动信息数据的重要手段。
特别是国际海事组织(International Maritime Organization, IMO)通过的国际海上人命安全公约(International Convention for Safety of Life at Sea,SOLAS)修正案要求:所有300 t以上的国际航行船舶、500 t以内的非国际航行船舶以及所有客船,都必须强制安装AIS设备[1],这使船舶监管部门可获取船舶数据。
从AIS提取的船舶大数据中分析船舶的运动轨迹,对其进行聚类研究,从而得出船舶运动的规律以及进一步发现、分析船舶的异常行为,为海事安全监管和决策提供支持服务。
对运动物标的轨迹聚类,即将轨迹划分成不同的、具有相似运动规律的对象组成的子集。
目前,国内外学者对轨迹聚类进行一系列的研究。
吐尔逊等[2]采用DBSCAN(Density-Based Spatial Clustering of Applications with Noise)算法对模拟农业机械作业轨迹进行分析,对农机作业状态进行聚类分类研究,分析农机作业班次的有效作业轨迹、空行转移轨迹和停歇轨迹,得出农机利用率。
数据预处理ppt课件
用箱边界(去替换箱中的每个数 据)
28
分箱法光滑数据
Sorted data for price (in dollars): 4, 8, 9, 15, 21, 21, 24, 25, 26, 28, 29, 34
* Partition into equal-frequency (equi-depth) bins:
位数Q1 、中位数、上四分位数Q3和最大值
盒的长度等于IRQ 中位数用盒内的横线表示 盒外的两条线(胡须) 分别延伸到最小和
最大观测值。
盒图的功能 1.直观明了地识别数据集中的离群点 2.判断数据集的偏态和尾重 3.比较几批数据的形状
2.2.3 基本描述数据汇总的图形显示
直方图、 分位数图、分位数-分位数图(q-q图) 散布图、散布图矩阵 局部回归(Loess)曲线
不一致的
采用的编码或表示不同,如属性名称不同
冗余的
如属性之间可以相互导出
数据错误的不可避免性
数据输入和获得过程数据错误 数据集成所表现出来的错误 数据传输过程所引入的错误 据统计有错误的数据占总数据的5%左
右[Redmen],[Orr98]
3
数据错误的危害性
高昂的操作费用 糟糕的决策制定 组织的不信任 分散管理的注意力
四分位数
中位数是第50个百分位数,是第2个四分位 数
第1个是第25个百分位数,Q1 中间四分位数极差 IQR = Q3 – Q1
离群点outlier
与数据的一般行为或模型不一致的数据对象
盒图 方差、标准差
反映了每个数与均值相比平均相差的数值 15
度量数据的离散程度…
盒图boxplot,也称箱线图 从下到上五条线分别表示最小值、下四分
MRI数据预处理流程资料讲解
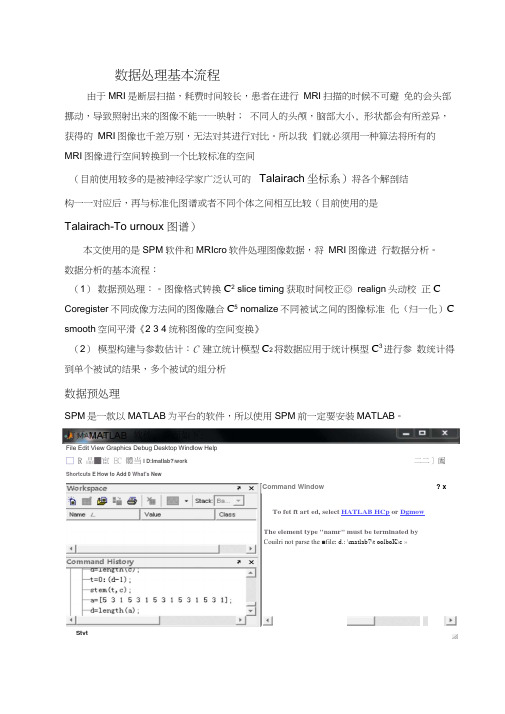
Command Window ? xTo fet ft art ed, select HATLAB HCporDgmowThe element type "namr" must be terminated byCouilri not parse the ■file: d.: \matlab7\t oolboK\c »数据处理基本流程由于MRI是断层扫描,耗费时间较长,患者在进行MRI扫描的时候不可避免的会头部挪动,导致照射出来的图像不能一一映射;不同人的头颅,脑部大小, 形状都会有所差异,获得的MRI图像也千差万别,无法对其进行对比。
所以我们就必须用一种算法将所有的MRI图像进行空间转换到一个比较标准的空间(目前使用较多的是被神经学家广泛认可的Talairach坐标系)将各个解剖结构一一对应后,再与标准化图谱或者不同个体之间相互比较(目前使用的是Talairach-To urnoux 图谱)本文使用的是SPM软件和MRIcro软件处理图像数据,将MRI图像进行数据分析。
数据分析的基本流程:(1)数据预处理:。
图像格式转换C2 slice timing获取时间校正◎ realign头动校正C Coregister不同成像方法间的图像融合C5 nomalize不同被试之间的图像标准化(归一化)C smooth空间平滑《2 3 4统称图像的空间变换》(2)模型构建与参数估计:C建立统计模型C2将数据应用于统计模型C3进行参数统计得到单个被试的结果,多个被试的组分析数据预处理SPM是一款以MATLAB为平台的软件,所以使用SPM前一定要安装MATLAB。
File Edit View Graphics Debug Desktop Windlow Help□ R 晶■宦EC 體当I D:lmatlab?\work 二二]阖Shortcuts E How to Add 0 What's NewStvt1•图像格式转换在进行数据预处理第一步要先将图像格式转换成SPM 可以识别的ANALYZE 格式。