何志敏_可编程逻辑系统设计代码
可编程控制器4-步进和功能指令
10
4.1.2 顺序功能图 有向连线(状态转移路线和方向): 从上到下、 从左到右的步间连线,或非前两方向则为加箭头的 步间连线。 转移(分割两个相邻步):有向连线上与其垂直的 短线。 转移条件:与转移相关的逻辑条件,用文字、布尔 代数表达式、图形符号标于转换短线旁。
动作(或命令):命令是指控制要求,动作是指输 出驱动
东西 信号 时间 信号 时间 绿灯亮 10 s 绿灯闪亮 3s 红灯亮 15 s 黄灯亮 2s 绿灯亮 10 s 红灯亮 15 s 绿灯闪亮 3s 黄灯亮 2s
南北
49
4.1.4 实例编程
起动/停止 X000 Y000 COM0 Y001 COM1 Y002 COM Y003 COM2 Y004 Y005 COM3 南北黄灯 南北红灯 东西黄灯 东西绿灯 南北绿灯 东西红灯
S20 X000 S21 X001 S22 X004 S50 S24 S23 X002 S25 X003 S26
移时,多个分支的转移
均相同 条件满足时,多个分支 同时被激活 被激活的多个分支必须
都完成且转移条件均满
足时,进行并行性分离
重复与循环
17
4.1.2 顺序功能图 编程方法:(1)应用起保停电路的方法
39
4.1.4 实例编程
40
4.1.4 实例编程
S0
M8002 SQ1
送料小车控制
甲地SQ1 乙地SQ2 丙地SQ3
X0
S20
T0
T0
甲地装货 K100
S21
SQ2
Y0 右行 T1 K100
T1 乙地卸货
S22
甲地SQ1
乙地SQ2
丙地SQ3
S23
C语言程序设计 (何钦铭 ) 高教版 第2版 课后习题答案
解答: #include <stdio.h> int main(void) { int flag, i, n, denominator; double item, sum; scanf("%d", &n); sum = 0; flag = 1; denominator = 1; for(i = 1; i <= n; i++){ item = flag * 1.0 / denominator; sum = sum + item; flag = -flag; denominator = denominator + 3; } printf("sum = %.3f\n", sum); return 0; } 2-16 编写程序,输入两个正整数 m 和 n,计算 m! + n!。 解答: #include "stdio.h"
1.3 习பைடு நூலகம்参考答案
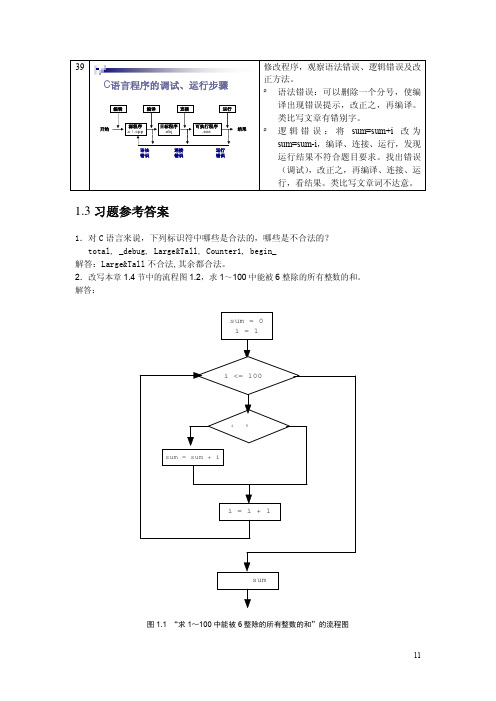
1 .对 C 语言来说,下列标识符中哪些是合法的,哪些是不合法的? t o t a l ,_ d e b u g ,L a r g e & T a l l ,C o u n t e r 1 ,b e g i n _ 解答:L a r g e & T a l l 不合法, 其余都合法。 2.改写本章 1.4 节中的流程图 1.2,求 1~100 中能被 6 整除的所有整数的和。 解答:
19
scanf("%d", &fahr); celsius = 5 * (fahr - 32) / 9; printf("celsius = %d\n", celsius); return 0; } 2-9 编写程序,输入 3 个整数,计算并输出它们的平均值。 解答: #include <stdio.h> int main(void) { int a, b, c; double average; scanf("%d%d%d", &a, &b, &c); average = (a + b + c) * 1.0 / 3; printf("average = %.2f\n", average); return 0; } 2-10 编写程序,输入 x,计算并输出下列分段函数 f(x)的值(保留 3 位小数)。
219524968_电工电子自动化的可编程控制系统设计
科技与创新┃Science and Technology&Innovation ·138·2023年第13期文章编号:2095-6835(2023)13-0138-03电工电子自动化的可编程控制系统设计张永香(江苏省通州中等专业学校,江苏南通226300)摘要:电工电子自动化技术,能够在电气系统领域内广泛应用,还能够将部分硬软件设备资源有效结合,合理运用可编程控制系统设计原理,将不同系统功能模块进行拓扑连接。
但是在广泛应用可编程控制逻辑器(Programmable Logic Controller,PLC)的过程中,需要以电工电子自动化系统的应用需求为核心,详细划分功能模块。
着重探析了电工电子自动化的可编程控制系统设计要点。
关键词:电工电子;自动化;可编程控制系统;自动化编程中图分类号:TH164;TP273文献标志码:A DOI:10.15913/ki.kjycx.2023.13.041电工电子自动化技术是信息化时代的重要产物之一,能够将更多数字信号和模拟信号进行快速处理,还能够将A/D(Analog/Digital)数模转换器应用在可编程控制逻辑器之中,但是需要对系统开关量和I/O (Input/Output)数据流进行严格控制。
在集中设计可编程控制系统软件的过程中,需要将电工电子自动化技术中的重要通信控制方法和系统操作逻辑进行组合优化设计。
1电工电子自动化技术概述在信息化时代,电工电子自动化技术需要涵盖元器件识别、电气焊接、电路分析与制图、电工电子仪表使用、传感器PLC编程算法等内容[1],还能够与特定学科领域进行有效衔接,将电气电路中的核心要素与实际生产生活需求有效对接。
电工电子自动化技术中的相关概念理论,以现代化工业生产和社会生活需求为基础,将电工电子操作流程和关键安全质量监管节点详细划分成多个类目。
在电气工程和信息工程等多个生产活动中,电工电子自动化技术的应用效果非常显著,能够逐步强化硬软件资源之间的适配度,还能够高效利用电力系统资源和信息资源。
可编程控制器原理与程序设计(第2版)[谢克明]第1章
![可编程控制器原理与程序设计(第2版)[谢克明]第1章](https://img.taocdn.com/s3/m/2f977e6859fb770bf78a6529647d27284a733777.png)
智能化
现代的可编程控制器具备了更强大的数据处理和逻辑运算 能力,能够实现更复杂的控制算法和数据处理功能,推动 了工业自动化系统的智能化发展。
无线通信与物联网技术
随着无线通信和物联网技术的发展,可编程控制器正逐渐 融入这些技术,实现远程监控和控制,提高了工业自动化 系统的灵活性和可靠性。
工业自动化网络简介
可编程控制器原理与程序设计(第2 版) 第1章
目录
• 可编程控制器概述 • 可编程控制器的组成与工作原理 • 逻辑控制器与顺序控制器 • 可编程控制器应用设计基础 • 可编程控制器的发展趋势与工业自动化网
络
01 可编程控制器概述
可编程控制器的定义
可编程控制器(Programmable Controller,简称PLC)是一种专门为工业环境设计的数字电子计算机,具有编程控制功能,能够 进行逻辑运算、顺序控制、定时、计数和算术运算等操作,并通过数字或模拟输入/输出接口控制各种类型的机械或生产过程。
现场安装与调试
将可编程控制器安装在现场, 进行系统调试和参数调整,确 保满足实际生产需求。
可编程控制器的选型与配置
控制规模
根据控制点数、通讯方式和扩展能力等 要素,选择合适规模的可编程控制器。
通讯模块
根据需要实现的控制功能和通讯协议, 选择合适的通讯模块,并配置正确的
通讯参数。
输入输出模块
根据输入输出信号的类型和数量,选 择合适的输入输出模块,并配置正确 的信号类型和接线方式。
在应用上,逻辑控制器适用于简单的开关量控制 场景,而顺序控制器则适用于需要自动化控制的 生产线或工业过程。
在结构上,逻辑控制器相对简单,而顺序控制器 通常具有更复杂的内部结构,以实现更复杂的控 制功能。
软件与微电子学院0910学年第二学期本科课程参考教材

网络协议与组网技术
1、《计算机网络(第四版)》,Andrew S. Tanenbaum著,潘爱民译,清华大学出版社,2004
2、思科网络技术学院教程,CCNA 1,网络基础,人民邮电出版社,2008
3、思科网络技术学院教程,CCNA 2,路由器与路由基础,人民邮电出版社,2008
面向服务架构SOA
1.《面向服务的计算:原理与应用》,喻坚等主编,清华大学出版社,2006
2.《Understanding SOA with Web Services 中文版》,Eric Newcomer等著,徐涵等译,电子工业出版社,2006
企业信息系统
1、《ERP原理、设计、实施(第三版)》,罗鸿编著,电子工业出版社
软件与微电子学院0910学年第二学期本科课程参考教材
课程名称
开课年级
参考教材
日语
09级本科
新版《标准日本语》初级上、下册
数字逻辑
08级本科
《数字电路与数字电子技术》岳怡编,西工大出版社
计算方法
08级本科
《计算方法》,聂玉峰 王振海主编,西北工业大学出版社
信号与系统
08级本科
《信号与系统(第三版)》段哲民等编,电子工业出版社,2008年
(2)Richard J. Roiger, Michael W. Geatz, Data Mining–A Tutorial-Based Primer,数据挖掘基础教程,清华大学出版社,2003.
(3)Michael J.ABerry, Gordon S. Linoff, Data Mining Techniques for Marketing, Sales, and Customer Relationship Management (Second Edition),数据挖掘技术,市场营销,销售与客户关系管理领域应用。机械工业出版社,2006.7.1
可编程控制器原理与程序设计(第2版)[谢克明] 第1章
![可编程控制器原理与程序设计(第2版)[谢克明] 第1章](https://img.taocdn.com/s3/m/05f7dc480b1c59eef9c7b400.png)
2ቤተ መጻሕፍቲ ባይዱ19/2/21
11
1.1.2 PLC的特点
1.可靠性好,抗干扰能力强
“专为适应恶劣的工业环境而设计的计算机”
2.功能完善:功能强,扩充方便,性能价格比高。 3.编程简单,使用方便。 PLC采用梯形图语言编程,容易掌握。 4.在线编程:在工业现场,用手持编程器或笔记本电脑可对PLC 进行编程,当PLC联网后,可在网络的任一位置对PLC编程。 5.容易安装,便于维护:采用模块化结构,现场安装非常简单, 维修方便。 6.体积小、重量轻、功耗低:是“机电一体化”特有的产品 。 7.价格便宜
2019/2/21
17
整体式结构
图1 整体式结构框图
2019/2/21
18
(2)模块式结构。 将CPU、电源、I/O单元、电源、通信等分 别做成模块,在应用中根据需要PLC采用搭积木的方式组成系 统。在一个机架上插上CPU、电源、I/O模块及特殊功能单元, 以构成一个总I/O点数很多的大规模综合控制系统。适用于大、 中型PLC. 特点: 配置非常灵活,可以根据不同的系统规模选用不同 档次CPU及各种I/O模块、功能模块。其模块尺寸统一、安装 整齐,对于I/O点数很多的系统选型、安装调试、扩展、维修 等都非常方便。要组成一个系统,只需在一块基板上插上CPU、 电源、输入、输出模块及其他诸如通讯、模数转换、数模转 换等特殊功能模块,就能构成一个总I/O点数很多的大规模综 合控制系统。故适用于大、中型PLC。这种结构形式PLC除了 各种模块以外,还需要用机架(主机架、扩展机架)将各模 块联成整体;有多块机架时,则还要用电缆将各机架联在一 起。
用户在选用 PLC 时,首先要了解 PLC 的结构和性 能。若只需大致了解 PLC 的性能。一般可用 CPU 芯 片、编程语言、用户程序容量、扫描速度 ( ms/k )、 I/O点数这五方面情况予以反映。一般, CPU档次高、编程语言完善、用户程序容量大、扫 描速度快、 I/O 点数多,则 PLC 性能就好,功能就 强,价格也就较高了。
PLC技术在机械电气控制装置中的应用_10

PLC技术在机械电气控制装置中的应用发布时间:2022-09-06T06:10:07.196Z 来源:《建筑实践》2022年10期作者:练梓亮龙韬[导读] 在我国进入信息化时代之后,社会和经济的发展速度逐渐加快,练梓亮龙韬身份证号:44532119850815****身份证号:36243019940719****摘要:在我国进入信息化时代之后,社会和经济的发展速度逐渐加快,这为各行各业带来了更多的发展机遇,工业生产行业在这种大背景下,规模不断扩大且数量也大幅度增加,虽然这能够让工业生产行业有更加广阔的发展平台,但同时也面临着更加严峻的考验,社会不断提高对工业生产的要求,所以传统的工业生产方式已经无法满足当前我国日益提升的社会需求,想要获得更好地经济效益和社会效益,工业生产企业就必须探索新的发展模式。
本文从机械电气控制目前的实际状况入手,介绍了PLC技术的优势,分析了PLC技术控制的类型,探索PLC技术在机械电气控制装置中的具体应用途径,希望能够为我国相关行业的快速发展提供积极的参考意义。
关键词:PLC技术;机械电气控制;应用引言目前,在机械电气控制中,借助PLC技术应用,能够显著提升自动化控制水平,提升控制效率,这一技术在机械电气控制中的应用也比较多,因为技术本身的优势突出,因此,在机械电气控制中能够实现有效应用推广,整体的应用效益比较好。
1.PLC技术的优势PLC技术也叫做可编程逻辑控制,该电子装置的应用需要与计算机技术与自动化技术结合运用,所以说组成可编程逻辑控制的基本部件都是生活、生产中较为普遍的,CPU、存储器是构成PLC 的基本单元模块,可编程逻辑控制其作用不只是能够存储收集到的所有数据,还能够对所有数据进行分析和运算,最后实现利用自动化技术远程控制机械电气装置的目标,PLC 技术的主要优点包括以下几个方面: 1.1有利于实现机电一体化一般来说可编程逻辑控制系统所使用的设备重量都比较轻,无论是安装还是使用都非常的方便、简单,所以能够很好的与互联网技术和计算机技术结合使用,在计算机技术的辅助下,对机械设备的远程开发调试工作变得更加简单,提高了机械与电气的融合程度,推动了电气与机械一体化的进程。
f0211程序设计

f0211程序设计
程序设计是一项关于设计和开发计算机程序的工作,它涉及到规划、编写、测试和维护程序代码的过程。
程序设计需要掌握编程语言和算法知识,并且要具备逻辑思维和问题解决能力。
在程序设计中,首先需要明确程序的需求和目标。
这包括了确定程序要解决的问题、所需的功能和性能要求。
在明确需求后,接下来需要选择合适的编程语言来实现程序。
常见的编程语言包括C、C++、Java、Python等。
在编写程序时,需要根据需求进行程序逻辑的设计。
这包括了确定程序的输入和输出、模块和函数的划分、以及程序流程的安排。
在设计完成后,就可以开始编写程序代码了。
编写程序代码需要严谨的语法和正确的使用编程范式,同时还需要注重代码的可读性和可维护性。
完成编写后,还需要进行程序的测试工作。
测试可以通过输入不同的数据验证程序的正确性和稳定性。
如果测试发现问题或错误,程序员需要对代码进行调试和修复。
一旦程序通过了测试,就可以发布和部署程序了。
在程序发布后,还需要进行程序的维护和优化工作。
维护包括了修复bug、更新功能和添加新功能等工作。
优化可以提高程序的性能和效率,以便更好地满足用户的需求。
总结来说,程序设计是一项需要深入学习和不断实践的技能。
通过合理的程序设计,可以提供高效、可靠和易用的计算机程序,为用户带来更好的体验。
RSLogix 5000 级别 2:基本梯形图逻辑解释课程说明书
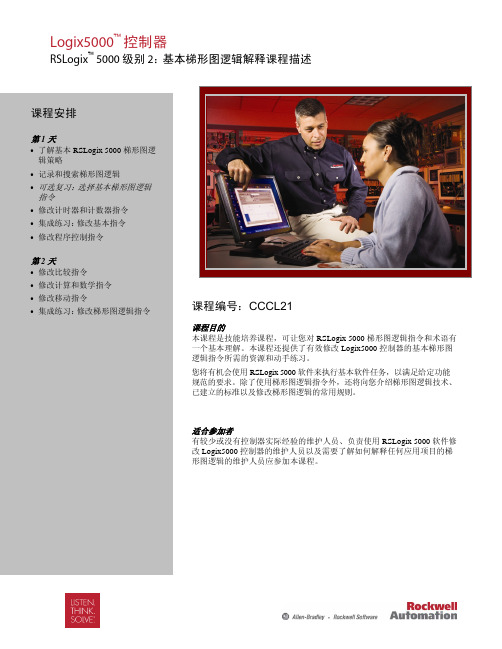
课程安排第 1 天•了解基本 RSLogix 5000 梯形图逻 辑策略• 记录和搜索梯形图逻辑•可选复习:选择基本梯形图逻辑指令• 修改计时器和计数器指令 • 集成练习:修改基本指令 •修改程序控制指令第 2 天• 修改比较指令 • 修改计算和数学指令 • 修改移动指令•集成练习:修改梯形图逻辑指令课程编号:CCCL21课程目的本课程是技能培养课程,可让您对 RSLogix 5000 梯形图逻辑指令和术语有一个基本理解。
本课程还提供了有效修改 Logix5000 控制器的基本梯形图 逻辑指令所需的资源和动手练习。
您将有机会使用 RSLogix 5000 软件来执行基本软件任务,以满足给定功能 规范的要求。
除了使用梯形图逻辑指令外,还将向您介绍梯形图逻辑技术、已建立的标准以及修改梯形图逻辑的常用规则。
适合参加者有较少或没有控制器实际经验的维护人员、负责使用 RSLogix 5000 软件修 改 Logix5000 控制器的维护人员以及需要了解如何解释任何应用项目的梯 形图逻辑的维护人员应参加本课程。
Logix5000 控制器RSLogix 5000 级别 2:基本梯形图逻辑解释课程描述动力、控制与信息解决方案GMST10-PP177A-ZH-E版权所有 ©2010 罗克韦尔自动化有限公司。
保留所有权利。
美国印刷。
课前要求为了成功完成本课程,需要满足以下课前要求:•完成 RSLogix 5000 级别 1: ControlLogix 系统基础 知识 课程(课程编号 CCP146)或能够: - 上线- 组态 I/O 模块 - 下载 - 分配标签 - 验证工程- 更改控制器上的运行模式- 在 RSLogix 5000 软件中输入或编辑基本梯形图 逻辑指令•能够执行基本 Microsoft ® Windows ® 任务,如使用 鼠标、浏览文件、打开窗口、关闭窗口、调整窗口大小和移动窗口技术要求罗克韦尔自动化将提供学员在课堂内使用的所有 技术。
可编程控制器应用系统设计方法
可编程控制器应用系统设计方法麻桃花【期刊名称】《价值工程》【年(卷),期】2013(32)23【摘要】设计一个科学合理的可编程控制器应用系统,必将会提高工业生产过程中的产品质量和生产效率。
该文从被控对象的控制要求和工艺要求入手,提出可编程控制器应用系统设计过程中各阶段的主要任务,使可编程控制器应用系统的设计更趋科学化、规范化、标准化。
%Designing a scientific and rational application of programmable controller system will improve the product quality and production efficiency in the process of industrial production. In this paper, from the controlled object control requirement and technological requirements, it puts forward the main task in each phase of the design process, so that the programmable controller application system becomes more scientific, more normalized and more standardized.【总页数】2页(P186-187)【作者】麻桃花【作者单位】内蒙古机电职业技术学院,呼和浩特010070【正文语种】中文【中图分类】TP302.1【相关文献】1.可编程控制器应用系统硬件设计方法 [J], 张波2.可编程控制器应用系统可靠性设计 [J], 王慧3.可编程控制器应用系统的干扰分析与抗干扰措施 [J], 姜久超;刘暐;郭玉霞;周丙臣4.探讨提高可编程控制器应用系统可靠性的措施 [J], 张玉凤5.可编程控制器(PLC)应用系统抗干扰措施 [J], 贾世胜;赵玉怀因版权原因,仅展示原文概要,查看原文内容请购买。
2010-6-2计算机密码学实验指导书

《计算机密码学》实验指导书邬志红编南昌航空大学计算机学院二零一零年六月目录实验1仿射密码设计 (1)实验2 DES对称加密设计 (3)实验3 RSA公钥密码设计 (8)实验4 MD5摘要与校验 (10)实验5 数字签名算法DSS (14)附录 (16)1. des_setup函数 (16)2. des_ecb_encrypt函数 (16)3. des_ecb_decrypt函数 (16)4. md5.h头文件 (19)5. md5.c源文件 (23)6. sha1.c源文件 (28)实验1仿射密码设计一、实验目的通过编程实现替代密码算法——仿射密码和简单置换密码算法,加深对古典密码体制的了解,为深入学习密码学奠定基础。
二、实验原理古典密码算法曾被广泛应用,大都比较简单,使用手工和机械操作来实现加密和解密。
它的主要应用对象是文字信息,利用密码算法实现文字信息的加密和解密。
下面介绍两种常见的具有代表性的古典密码算法,以帮助同学们对密码算法建立一个初步的印象。
1.替代密码——仿射密码替代密码算法的原理是使用替代法进行加密,就是将明文中的字符用其它字符替代后形成密文。
例如,明文字母a 、b 、c 、d ,用D 、E 、F 、G 做对应替换后形成密文。
替代密码包括多种类型,如单表替代密码、多表替代密码等。
下面介绍一种典型的单表替代密码——仿射密码。
它的加密、解密过程可以表示为下面的函数:加密:解密:仿射加密要求, 否则就褪化为 。
故密钥空间大小为:例如:密钥k=(7,3),7-1(mod 26)=15 加密函数: 解密函数: 设明文:China,首先转换为数字:2,7,8,13,0 加密:“China”经仿射加密变换成“RAHQD” 解密:原始消息“China”得到恢复)26(mod )(21k x k x f y +==)26)(mod ()(2111k y k y f x -==--1)26,gcd(1=k )26(mod )(2k x f y ==3122612),(21=⨯=k k )26(mod 37)(+==x x f y )26(mod 1915)26)(mod 3(15)(1--==-y y y f x =⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡⨯D Q H A R 316701726mod 394595217333330138727⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡⨯A N I H C 01387226mod 2622186192361919191919316701715三、实验环境运行Windows或Linux操作系统的PC机,具有gcc(Linux)、VC或TC(Windows)等C语言编译环境。
c语言程序设计何钦铭第二版

c语言程序设计何钦铭第二版C语言程序设计是一门基础而重要的计算机编程课程,它为学习者提供了一种高效、灵活的编程工具。
何钦铭教授的《C语言程序设计》第二版,是众多编程教材中的佼佼者,以其深入浅出的讲解和丰富的实例,深受广大学生和教师的喜爱。
第一章:C语言概述C语言由丹尼斯·里奇(Dennis Ritchie)在20世纪70年代初开发,最初用于UNIX操作系统。
C语言以其简洁、高效、可移植的特点,成为系统编程和嵌入式编程的首选语言。
何钦铭教授在书中详细介绍了C 语言的发展历史、特点以及在现代编程领域的应用。
第二章:C语言基础本章深入讲解了C语言的基本语法,包括数据类型、变量声明、运算符和表达式等。
何教授通过实例代码,帮助读者理解C语言的基本概念,并强调了良好的编程习惯对于编写高质量程序的重要性。
第三章:控制语句控制语句是程序流程控制的核心。
何教授详细介绍了条件语句(if)、循环语句(for、while、do-while)以及选择语句(switch-case)的使用方法和应用场景,并通过实际问题引导读者掌握这些语句的逻辑结构。
第四章:函数函数是模块化编程的基础。
何教授在本章中讲解了函数的定义、声明、调用以及参数传递机制。
此外,还介绍了递归函数的概念和应用,以及如何通过函数实现代码复用和模块化。
第五章:数组数组是存储多个元素的集合,何教授在本章中详细讲解了一维数组和二维数组的声明、初始化和访问方法。
同时,还介绍了数组在排序、搜索等算法中的应用。
第六章:指针指针是C语言中一个强大的概念,它允许程序员直接操作内存地址。
何教授在本章中详细讲解了指针的基本概念、指针与数组的关系、指针的运算以及指针在函数中的应用。
第七章:结构体与联合体结构体和联合体是C语言中用于创建复杂数据类型的重要工具。
何教授在本章中介绍了如何定义和使用结构体和联合体,以及它们在数据组织和管理中的作用。
第八章:预处理指令预处理指令是C语言编译过程中的指令,用于控制编译器的行为。
c语言程序设计(何钦铭)

c语言程序设计(何钦铭)C语言程序设计是一门基础而重要的计算机编程课程,它不仅教授编程语言的语法和结构,还涵盖了程序设计的基本概念和方法。
何钦铭教授编写的《C语言程序设计》教材,以其深入浅出的讲解和丰富的实例,深受广大学生和教师的喜爱。
C语言简介C语言是一种通用的、过程式的计算机程序设计语言,由丹尼斯·里奇在1972年开发。
它具有高效、灵活、功能强大等特点,广泛应用于系统软件、应用软件、嵌入式系统等领域。
C语言的特点1. 简洁性:C语言的语法简洁,易于学习。
2. 结构化:C语言支持模块化编程,有利于程序的组织和管理。
3. 可移植性:C语言编写的程序可以在不同的计算机系统上运行,具有很好的可移植性。
4. 高效性:C语言编译后的程序执行效率高。
5. 功能强大:C语言提供了丰富的运算符和数据类型,支持指针、结构体等高级特性。
C语言的基本结构C语言程序由函数组成,其中`main()`函数是程序的入口点。
程序的基本结构包括:- 预处理指令:如`#include`、`#define`等。
- 函数定义:包括返回类型、函数名和参数列表。
- 变量声明:定义变量的类型和名称。
- 语句:执行程序逻辑的代码块。
数据类型和变量C语言提供了多种基本数据类型,如整型(`int`)、浮点型(`float`、`double`)、字符型(`char`)等。
变量是程序中存储数据的容器,需要先声明后使用。
控制语句C语言的控制语句包括:- 条件语句:`if`、`switch`- 循环语句:`for`、`while`、`do-while`- 跳转语句:`break`、`continue`、`return`、`goto`函数函数是C语言中实现代码复用的基本单位。
用户可以定义自己的函数,也可以使用标准库中的函数。
函数包括:- 返回类型:指定函数返回值的类型。
- 函数名:唯一标识函数的名称。
- 参数列表:函数接收的输入值。
- 函数体:实现函数功能的代码块。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验二:一位全加器行为描述:process进程library ieee;use ieee.std_logic_1164.all;entity addall isport(a,b,c:in std_logic;sum,cout:out std_logic); end addall;architecture bhv of addall issignal m:std_logic_vector(2 downto 0); beginm<=c&a&b;process(a,b,c)beginif m="000" thensum<='0';cout<='0';elsif m="001" thensum<='1';cout<='0';elsif m<="010" thensum<='1';cout<='0';elsif m="011" thensum<='0';cout<='1';elsif m="100" thensum<='1';cout<='0';elsif m="101" thensum<='0';cout<='1';elsif m="110" thensum<='0';cout<='1';elsesum<='1';cout<='1';end if;end process;end bhv;一位全加器数据流描述:并行library ieee;use ieee.std_logic_1164.all;entity addall isport(a,b,c:in std_logic;sum,cout:out std_logic); end addall;architecture bhv of addall issignal m:std_logic_vector(2 downto 0); beginm<=c&a&b;sum<='0' when m="000" else'1' when m="001" else'1' when m="010" else'0' when m="011" else'1' when m="100" else'0' when m="101" else'0' when m="110" else'1';cout<='0' when m="000" else'0' when m="001" else'0' when m="010" else'1' when m="011" else'0' when m="100" else'1' when m="101" else'1' when m="110" else'1';end bhv;四位全加器网表描述:半加器:library ieee;use ieee.std_logic_1164.all; entity h_adder isport (a: in std_logic;b:in std_logic;co:out std_logic;so:out std_logic); end h_adder;architecture bhv of h_adder is beginso<=a xor b;co<=a and b;end bhv;或门:library ieee;use ieee.std_logic_1164.all; entity or2a isport (a,b: in std_logic;c: out std_logic); end or2a;architecture bhv of or2a is beginc<=a or b;end bhv;四位:library ieee;use ieee.std_logic_1164.all; entity h_adder isport (a: in std_logic;b:in std_logic;co:out std_logic;so:out std_logic); end h_adder;architecture bhv of h_adder is beginso<=a xor b;co<=a and b;end bhv;library ieee;use ieee.std_logic_1164.all; entity or2a isport (a: in std_logic;b:in std_logic;c: out std_logic); end or2a;architecture bhv of or2a is beginc<=a or b;end bhv;library ieee;use ieee.std_logic_1164.all; entity f_adder isport ( ain:in std_logic;bin:in std_logic;cin:in std_logic;cout:out std_logic;sum:out std_logic); end f_adder;architecture bhv of f_adder iscomponent h_adder isport ( a:in std_logic;b:in std_logic;co:out std_logic;so:out std_logic); end component;component or2a isport( a:in std_logic;b:in std_logic;c:out std_logic);end component;signal d,e,f:std_logic;beginu1:h_adder port map(a=>ain,b=>bin,co=>d,so=>e);u2:h_adder port map(a=>e,b=>cin,co=>f,so=>sum);u3:or2a port map(a=>d,b=>f,c=>cout);end bhv;实验三:38译码器:library ieee;use ieee.std_logic_1164.all;entity m3_8de isport(a:in std_logic_vector(2 downto 0);en:in std_logic_vector(2 downto 0);b:out std_logic_vector(7 downto 0));end m3_8de;architecture bhv of m3_8de issignal m:std_logic_vector(5 downto 0);beginm<=en&a;with m selectb<="00000001" when "100000","00000010" when "100001","00000100" when "100010","00001000" when "100011","00010000" when "100100","00100000" when "100101","01000000" when "100110","10000000" when "100111","00000010" when others;end bhv;阴极管:library ieee;use ieee.std_logic_1164.all;entity guan isport(a:in std_logic_vector(3 downto 0);b:out std_logic_vector(6 downto 0));end guan;architecture bhv of guan isbeginb<="0111111" when a="0000" else"0000110" when a="0001" else"1011011" when a="0010" else"1001111" when a="0011" else"1100110" when a="0100" else"1101101" when a="0101" else"1111101" when a="0110" else"0000111" when a="0111" else"1111111" when a="1000" else"1101111" when a="1001" else"0000000";end bhv;实验四:四位加减法计数器:LIBRARY IEEE;use ieee.std_logic_unsigned.all;USE IEEE.STD_LOGIC_1164.ALL;entity counter4 isport(clk,rst,updn:in std_logic;q:out std_logic_vector(3 downto 0)); end counter4;architecture behave of counter4 isbeginprocess(clk,rst)variable tmp_q:std_logic_vector(3 downto 0);beginIF rst = '1' THENtmp_q := (others=>'0');elsif clk='1' and clk'eventthenIF updn = '1' THENtmp_q := tmp_q + 1;ELSE tmp_q := tmp_q -1;END IF;q <= tmp_q;END IF;end process;end behave;一秒钟定时器:library ieee;use ieee.std_logic_1164.all;use ieee.std_logic_unsigned.all;entity timers isport(clk:in std_logic;q:out std_logic);end timers;architecture bhv of timers isbeginprocess(clk)variable m:integer range 0 to 50000000;beginif(clk='1' and clk'event) then m:=m+1;if m<=24999999 then q<='0';elsif m<=49999999 then q<='1';else m:=0;end if;end if;end process;end bhv;8位左移移位寄存器:library ieee;use ieee.std_logic_1164.all;use ieee.std_logic_unsigned.all;entity yiwei isgeneric(n:natural:=8);port(clk,a:in std_logic;q:out std_logic_vector(n-1 downto 0));end yiwei;architecture bhv of yiwei isbeginprocess(clk)variable m:std_logic_vector(n-1 downto 0);beginif clk='1' and clk'event thenm:=m(n-2 downto 0)&a;(右移就a&m(n-1 downto 1))q<=m;end if;end process;end bhv;三、实验内容。