《Nature》发布毫米级软体机器人,为人类研究体内微型机器人提供新思路
软体机器人的研究与应用

软体机器人的研究与应用随着科技的发展,机器人逐渐成为了人类的重要工具,能够代替人类完成一些重复性、简单性的工作,同时也能够处理一些危险环境和高风险作业。
传统的机器人由硬件组成,但随着软件技术的发展,软体机器人悄然兴起。
软体机器人是一种由柔性和可变形物质制成的机器人,具有较强的适应性和灵活性,可以用于复杂的任务和环境中。
本文将从软体机器人的定义、原理、特点和应用方面入手,深入探讨软体机器人的研究与应用。
一、定义软体机器人指由柔性、可变形物质制成的机器人,常采用一些轻型、可塑性材料如硅橡胶、弹性体、液晶聚合物等作为机器人的主体,可通过膨胀、变形、收缩等行为得以实现形态的变化和运动的控制。
因此,软体机器人的机体通常具有柔韧性、形变性和自适应性,相较于传统机器人具有更高的适应性和更好的机动性能。
二、原理软体机器人主要依靠机身内的气压控制设备或微电机来控制机身的形变和移动。
通过气压控制,软体机器人的机身可以通过改变内部的空气压力来实现形状的变化,从而实现不同的运动或变形。
微电机能够控制机器人内部的一些运动器官,如骨骼肌、弯曲肌等,从而使机器人产生复杂的运动。
三、特点软体机器人具有许多传统硬件机器人无法匹敌的特点。
首先,软体机器人无需按照传统机器人的刚性要求制造,主体材料如树脂、能改变形状的聚合物等耐用、轻便并且容易加工,在一些特殊环境和任务中具有更好的适应性。
其次,软体机器人相较于传统机器人在运动控制上更灵活,采用多驱动方式,不仅仅控制机器人的运动,还控制可塑性材料的形变,实现更高级的变形运动,如绕曲、展开、爬行、分裂等。
第三,软体机器人在某些特性上也相较于传统机器人更具实用性,如柔软和弯曲等特性,使其更容易在复杂的环境中操作和达到目标。
四、应用软体机器人在许多领域都有广泛的应用,尤其是一些传统机器人难以达到的领域。
如,软体机器人可以被用于狭窄的空间公共设施、污水管道维护、地震或其他自然灾害后的救援等复杂环境中,应对孔隙、形状、装饰和其它差异性更大的环境,具有不可替代的优势。
软体机器人综述

软体机器人综述随着科技的不断发展,机器人已经成为了现代社会中不可或缺的一部分。
而软体机器人作为机器人领域中的一种新兴技术,具有其独特的优势和特点,受到了广泛的和研究。
本文将对软体机器人的研究现状、发展趋势以及应用领域进行综述。
软体机器人是一种由柔性和可延展材料构成,具有类生物体运动和适应能力的机器人。
与传统机器人相比,软体机器人具有更好的适应性和灵活性,可以适应各种复杂的环境和任务。
目前,国内外的研究者们已经开发出了多种不同类型的软体机器人,如仿生机器人、柔性机器人、可穿戴机器人等。
其中,仿生机器人是软体机器人领域中的一个研究热点。
这种机器人可以通过模仿生物体的形态和运动方式来实现类似生物体的运动和适应能力。
例如,一些仿生机器人可以模仿鸟类的飞行方式,实现飞行和空中悬停等动作。
另外,柔性机器人也是一种重要的软体机器人类型。
这种机器人通常由柔性的材料构成,可以通过改变自身的形状和大小来实现运动和适应。
例如,一些柔性机器人可以通过改变自身的形状来实现爬行、滚动等动作。
随着技术的不断发展,软体机器人的发展也呈现出一些新的趋势。
软体机器人的智能化程度将不断提高。
未来的软体机器人将更加智能化,可以通过感知和识别环境来实现自适应和自主决策。
软体机器人的可穿戴性和便携性将不断提高。
未来的软体机器人将更加轻便和灵活,可以适应各种不同的环境和任务。
软体机器人的制造工艺将不断改进。
未来的软体机器人将更加精细和可靠,可以通过大规模生产来实现商业化应用。
软体机器人的应用领域非常广泛,可以应用于医疗、军事、救援、服务等领域。
在医疗领域中,软体机器人可以用于手术辅助、康复训练等方面。
在军事领域中,软体机器人可以用于侦察、探测、排爆等方面。
在救援领域中,软体机器人可以用于搜救、排险等方面。
在服务领域中,软体机器人可以用于家政、餐饮、酒店等方面。
软体机器人作为机器人领域中的一种新兴技术,具有其独特的优势和特点,未来的发展前景非常广阔。
仿生机器人:自然界的灵感
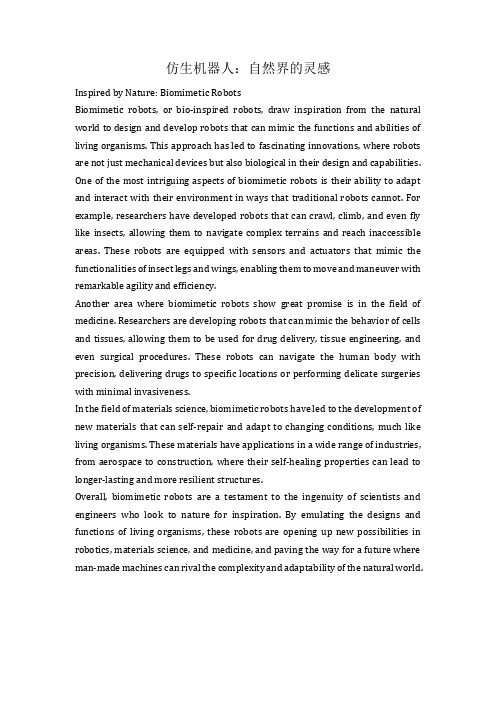
仿生机器人:自然界的灵感Inspired by Nature: Biomimetic RobotsBiomimetic robots, or bio-inspired robots, draw inspiration from the natural world to design and develop robots that can mimic the functions and abilities of living organisms. This approach has led to fascinating innovations, where robots are not just mechanical devices but also biological in their design and capabilities. One of the most intriguing aspects of biomimetic robots is their ability to adapt and interact with their environment in ways that traditional robots cannot. For example, researchers have developed robots that can crawl, climb, and even fly like insects, allowing them to navigate complex terrains and reach inaccessible areas. These robots are equipped with sensors and actuators that mimic the functionalities of insect legs and wings, enabling them to move and maneuver with remarkable agility and efficiency.Another area where biomimetic robots show great promise is in the field of medicine. Researchers are developing robots that can mimic the behavior of cells and tissues, allowing them to be used for drug delivery, tissue engineering, and even surgical procedures. These robots can navigate the human body with precision, delivering drugs to specific locations or performing delicate surgeries with minimal invasiveness.In the field of materials science, biomimetic robots have led to the development of new materials that can self-repair and adapt to changing conditions, much like living organisms. These materials have applications in a wide range of industries, from aerospace to construction, where their self-healing properties can lead to longer-lasting and more resilient structures.Overall, biomimetic robots are a testament to the ingenuity of scientists and engineers who look to nature for inspiration. By emulating the designs and functions of living organisms, these robots are opening up new possibilities in robotics, materials science, and medicine, and paving the way for a future where man-made machines can rival the complexity and adaptability of the natural world.。
纳米机器人技术的最新研究进展

纳米机器人技术的最新研究进展浩瀚的宇宙中,每一个物质体都是由不计其数的微小分子构成的。
这些分子通过特定的方式组合在一起,形成了我们目前所知的各种物质形态。
在这些分子之中,还有一类特殊的分子——纳米粒子。
它们的尺寸不到1微米,相当于1/1000000000米,远远小于我们眼中所能看到的任何一个微小物体。
然而,这些纳米粒子却具有着独特的物理和化学性质,它们的表面积与质量比可达到极高的水平,能够更好地与大量分子发生作用,从而形成纳米粒子的独特特性。
由此,纳米粒子已成为当今科学研究领域中备受瞩目的领域之一。
纳米机器人技术就是一种应用纳米粒子制造的微型机器人技术。
它可以帮助生物、医学、电子、环境和卫星通信等领域做出巨大的贡献。
其它的一些特征还包括自我修复、自主组合和控制等。
近年来,随着纳米技术的快速发展,纳米机器人技术也有了显著的进展。
一、纳米机器人技术在医学中的应用人们对纳米机器人在医学中的应用十分感兴趣,其中最吸引人的是它们无法肉眼看到的尺寸和能够在人体内进行操作。
纳米机器人技术可以让研究人员掌握治疗疾病的细微技能。
比如,科学家们可以制造出小型的纳米机器人,用它们来完成一些小型手术,例如在身体中切除癌细胞或药物释放。
在理想条件下,专家们甚至有机会使纳米机器人携带一些汽油或能源充电器,以保证它们能够在人体内长时间运行。
纳米机器人技术还可以被用来帮助病人进行药物输送。
发现了一些能够发生锁定和释放的纳米粒子,这对于通过化学方式向人体输送药物非常有用。
这些型纳米粒子可以精确地交付抗癌化学物质,它们可以很好地阻止肿瘤细胞的生长。
尝试使用这些纳米粒子可以避免其他方式不可避免的伤害。
纳米机器人甚至可以完成人体各个系统中的操作。
二、纳米机器人技术在环境保护中的应用环境保护已成为当今必不可少的一项工作。
对于环境的保护,纳米技术也可以发挥出巨大的作用。
举例来说,纳米机器人可以被用来清除污染物,以减少对环境的伤害。
纳米机器人可以精确地定位污染物,从而减轻这种污染物对环境的影响。
纳米机器人微小机器的巨大应用前景

纳米机器人微小机器的巨大应用前景纳米机器人(Nanorobots)是一种具有微小尺寸并能够执行特定任务的机器人。
随着微电子技术、纳米科技的不断进步,纳米机器人的研发和应用正在取得巨大的突破。
纳米机器人的微小尺寸和高度机械化的特性使其具备广泛的应用前景,涉及医学、环境、工业等多个领域。
一、医学应用纳米机器人在医疗领域的应用前景巨大。
首先,纳米机器人可以用于早期癌症的精确诊断和治疗。
通过注射进入人体,纳米机器人可以靶向癌细胞,并进行精确的治疗。
其独特的机械结构和微小尺寸可以穿过血管、细胞壁等,进行精确的介入操作。
其次,纳米机器人可以用于血管清理和修复。
纳米机器人可以自主地识别和清除血管中的血栓和斑块,减少心脑血管疾病的发生。
同时,纳米机器人还可以进行血管的修复和再生,为心脏病患者提供更好的治疗选择。
此外,纳米机器人还可以用于药物的传输和释放,提高药物的精准性和效果。
二、环境应用纳米机器人在环境领域的应用也具有巨大的潜力。
首先,纳米机器人可以用于水污染的治理。
纳米机器人可以穿过微小的孔隙和滤网,捕捉和清除水中的微生物、有害物质等。
其次,纳米机器人可以用于土壤修复和植物保护。
通过运输和释放纳米材料,纳米机器人可以提高土壤的肥力和水分保持能力,并对植物进行精准的治疗和营养补充。
此外,纳米机器人还可以用于大气污染的监测和治理,提高空气质量。
三、工业应用纳米机器人在工业领域的应用前景也十分广阔。
首先,纳米机器人可以用于制造业的精准加工和组装。
纳米机器人可以进行微小零部件的加工和组装,提高产品的质量和生产效率。
其次,纳米机器人可以用于材料的研究和开发。
通过纳米机器人的操控和调控,可以在纳米尺度上研究和改良材料的性能,开发出更加先进的材料。
此外,纳米机器人还可以用于能源行业的研究和开发,提高能源的转化效率和利用率。
总结起来,纳米机器人的微小尺寸和高度机械化的特性赋予其巨大的应用前景。
在医学领域,纳米机器人可以用于癌症的精确诊断和治疗,血管的清理和修复以及药物的传输和释放。
《ScienceRobotics》与《Nature》分别发布!你来评判港科大和MIT研发的。。。

《ScienceRobotics》与《Nature》分别发布!你来评判港科⼤和MIT研发的。
研究新的驱动材料被认为是“科学机器⼈的⼗⼤巨⼤挑战”之⾸,因为⼀旦成功,将彻底改变机器⼈均需依靠电机驱动的基本设定。
⽽为了更好的开发微型与仿⽣机器⼈、医疗装置及⼈⼯肌⾁,科研⼈员们在过去的30年⼀直研究⽤不同的⽅法研究新型的驱动材料。
⽆独有偶,近期《Science Robotics》和《Nature》各⾃发布了⼀篇⽂章,分别介绍了来⾃⾹港⼤学和MIT的科研团队研发出的新型材料。
各种材料各有所长,它们的共同点就是都能在⾃⼰的底盘展开魔⿁的步伐。
下⾯就带⼤家⼀起来看⼀下究竟哪家的新材料更奇特。
⼀束微⼩的光便能让⼀群机器⼈“群魔乱舞”这放在以前或许是科幻放在今后也许会成为即将实现的科技这⼀切源于⾹港⼤学研究出了仅靠光便能驱动的新型材料氢氧化镍磁铁⼤家都玩过但通过3D打印技术让磁铁的“每⼀帧”都有不同的排列顺讯就能赐予普通磁铁特殊的步伐这就是MIT最新研制的3D打印软材料第⼀种材料是⾹港科技⼤学颜庆云教授团队研究出的新型材料“氢氧化镍”,这种材料的突出优点便是极其敏感,它对光源、电⼒、温度、湿度等外部环境因素的改变都能做出反应。
并且响应速度⾮常快。
据介绍这种的新型材料氢氧化镍⼏乎可以对光线做出即时反应,并产⽣相当于⾃⾝重量的3000倍的⼒。
因⽽利⽤这种材料,通过良好的结构设计,⾹港科技⼤学把它做成了⼀个迷你⼿臂,这个⼩⼩的迷你⼿臂能够抬起相当于它⾃⾝重量50倍的物体。
⽽且,利⽤这种材料配合⼀个挡光板,让氢氧化镍间歇性的接受到间歇性的光源,还可以创造出⼀个可以移动的⼩型机器⼈。
如下图那样前腿照射到⼩型步⾏机器⼈的前腿上使其伸直,挡光板阻挡了光照射在后退上让它维持卷曲状态。
这样⼩⼩机器⼈就能完成基本的⾛路⾏为了。
⾹港⼤学的研究团队,也尝试了让这种材料单纯的做机器⼈的动⼒装置。
让氢氧化镍作为机器⼈⼩车的四肢,这样,⼀个画风独特,在光照条件下便能向前移动的机器⼈⼩车便造成了。
软体机器人技术的一些研究新进展

软体机器人技术的一些研究新进展摘要:基于材料、化学以及控制学等不同学科的深入研究,对章鱼、海星等软体生物的形态进行细致的观察,并进行科学的模仿,人们研究出一种新型的机器人:软体机器人。
随着社会的发展和科学技术的提高,软体机器人作为一种较为科技前沿的发明,具有广阔的研究空间和发展前景。
软体机器人是由软质材料构成,具有良好的弹性、变形以及生物相容性等性能。
在医疗、建筑、勘探等众多的领域具有广阔的发展前景。
软体机器人设备是一种新型的机电一体化的智能系统,它由本体、驱动器、感知器组成,能够完成一些高难度的任务。
本文将对软体机器人进行详细的介绍,并对其在医疗领域、野外勘探领域等方面的应用展开分析。
关键词:软体机器人;3D打印;应用分析一、引言软体机器人顾名思义,这种机器人是采用软体材料所构成。
软体机器人主要由本体、驱动器、感知器三个部分组成。
其中,本体主要是由具有高弹性、热稳定性好、化学性质稳定的橡胶和水凝胶等高分子材料组成,即使是外界条件发生变化也能够表现出较好的溶胀行为。
驱动器主要由形状记忆性能好、弹性强和可变刚度好的形象记忆合金组成。
感知器主要是由柔性好,感知密度高的检测器件组成。
因此,软体机器人具有很好的变形性、灵活性和生物相容性。
与传统的刚性机器人相比自由度强较强,应用范围更广,能够在更多的领域进行应用。
二、3D打印软体机器人哈佛大学曾利用3D打印技术,成功制造出仿章鱼型软体机器人。
3D打印技术就是利用打印头喷嘴和高科技打印技术,将不同的材料进行堆积,从而完成制造的高科技工艺。
3D打印技术可以利用喷墨打印、光固化成型、选择性激光烧结等不同技术,完成对软体机器的制造。
喷墨打印软体机器人是通过对材料进行喷射所完成机器人制造的一种技术。
但是喷墨打印技术受限于油墨配制方法,并且打印设备昂贵,因此其开发研制有待进一步的研究。
光固化成型3D打印技术主要是利用有机硅材料完成软体机器人的设计。
通过将有机硅材料进行改性,使其成为光敏感材料,从而够被光固化成型,进而形成软体机器人。
软体机器人的发展应用与展望

软体机器人的发展应用与展望在当今科技飞速发展的时代,机器人领域的创新不断涌现,其中软体机器人以其独特的特性和广阔的应用前景,成为了备受关注的研究热点。
软体机器人是一种由柔软材料制成的机器人,与传统的刚性机器人相比,它们具有更高的灵活性、适应性和安全性。
这些柔软材料通常包括硅胶、橡胶、聚合物等,能够模拟生物的柔软组织和运动方式。
软体机器人的发展可以追溯到多年前,但其真正引起广泛关注还是在近几年。
早期的研究主要集中在材料的选择和制造工艺上,试图找到既具有良好的机械性能又能满足复杂运动需求的柔软材料。
随着技术的不断进步,软体机器人的设计和制造逐渐成熟,其应用领域也不断拓展。
在医疗领域,软体机器人展现出了巨大的潜力。
例如,在微创手术中,传统的刚性器械可能会对患者的组织造成损伤,而软体机器人由于其柔软的特性,可以更好地适应人体内部的复杂环境,减少手术创伤。
一些软体机器人被设计成可以在血管内自由移动,用于输送药物、清除血栓等。
此外,软体机器人还可以用于康复治疗,帮助患者恢复运动功能。
比如,为肢体残疾的患者提供辅助运动的设备,或者为中风患者设计专门的康复训练工具。
在工业领域,软体机器人也有出色的表现。
它们可以在狭小的空间内进行操作,完成一些传统机器人难以完成的任务。
例如,在电子设备的组装中,软体机器人能够轻柔地抓取和放置微小的零部件,避免对其造成损坏。
在复杂的管道检测和维修中,软体机器人能够自由弯曲和伸展,更好地适应管道的形状和环境。
在探索未知领域方面,软体机器人同样发挥着重要作用。
例如,在深海探测中,软体机器人可以承受巨大的水压,并且能够在复杂的海底地形中灵活移动,收集样本和数据。
在太空探索中,软体机器人的轻量化和柔韧性使其在航天器的维护和修复方面具有独特的优势。
然而,软体机器人的发展也面临着一些挑战。
首先是材料的性能问题。
虽然目前已经有了多种柔软材料可供选择,但在强度、耐久性和响应速度等方面仍有待提高。
其次是驱动和控制技术。
什么是软体机器人现代文阅读理解

软体机器人是一种模仿动物或人类生物结构和运动控制的机器人。
它利用软性材料和可变形构件替代传统的硬性部件和机械连接。
软体机器人通常具有高度柔韧性、自适应性和变形性,能够在复杂环境中执行各种任务。
软体机器人是现代机器人技术领域的一个重要研究方向。
它在军事、医疗、救援、探险和娱乐等领域具有巨大的应用前景。
软体机器人的研究意义重大,对于提高机器人的适应性、灵活性、韧性和自主性具有重要意义。
软体机器人的结构和运动原理受到生物学启发。
通过对动物运动机理和生物体的解剖学研究,科学家们发现了许多新颖的设计思路和控制方法。
软体机器人以其与生物体相似的外观和运动方式成为机器人领域的一个研究热点。
软体机器人的研究内容主要包括结构设计、材料选择、运动控制、智能感知等方面。
通过研究新型的柔性材料和可变形构件,科学家们设计出了各种具有不同形态和功能的软体机器人原型。
这些机器人可以像蠕虫一样爬行、像水母一样游动,也可以改变自身形态适应不同的工作环境。
在软体机器人的运动控制方面,科学家们引入了许多新颖的方法。
利用人工智能、机器学习等技术,软体机器人能够实现自主的运动规划和环境感知,具备一定的自主决策能力。
这些技术的引入使得软体机器人具有更广泛的应用空间和灵活性。
软体机器人在各种领域都具有广泛的应用前景。
在军事领域,软体机器人可以用于敏捷潜行、隐蔽侦察、爬行攀登等任务。
在医疗领域,软体机器人可以用于内窥镜手术、药物运输、病理诊断等。
在救援和探险领域,软体机器人可以用于灾害救援、野外探险、深海勘探等。
然而,软体机器人仍然面临许多挑战和难题。
软体材料的稳定性、耐久性和可控性是当前研究的重点之一。
另外,软体机器人的运动控制和智能感知仍然存在许多困难和问题。
如何使软体机器人更好地适应多变的工作环境,成为了研究人员需要解决的一个重要问题。
软体机器人是一种模仿生物构造和运动的机器人,具有高度的柔韧性、自适应性和变形性。
软体机器人的研究领域包括结构设计、材料选择、运动控制、智能感知等方面。
软体机器人技术的研究及其应用场景
软体机器人技术的研究及其应用场景随着科技的发展,机器人技术越来越成熟,各行各业都开始使用机器人来提高工作效率和精确度。
然而,传统的机器人往往是硬质的,限制了它们在柔性环境中的应用。
而软体机器人技术的出现,破解了机器人在柔性环境中的应用难题,开启了无限可能的新市场和应用场景。
一、软体机器人技术的研究软体机器人可以视为一种仿生系统,它具有生物体具备的柔性、变形、适应性和可塑性等特征。
在这种机器人中,软体体积较小、重量较轻,能够适应复杂环境和不规则形体。
同时,软体机器人不仅能够实现高度精确的动作控制,还可以耐受较大的冲击、摩擦和变形。
软体机器人技术的研究主要包括机械结构设计、运动规划与控制、材料制备和传感器集成。
机械结构设计需要考虑软体机器人的材料、造型和结构组织等特性,以确保其适应性和可塑性。
运动规划与控制是软体机器人技术中的核心问题,需要计算机视觉、机器人控制和机器学习等多学科知识的支持。
材料制备方面需要使用具有侧向延展性和柔软度的材料,例如:聚氨酯泡沫、硅胶、液态金属等。
传感器的集成是软体机器人的必要组成部分,可以采用压电传感器、磁传感器、光纤传感器等多种可变形传感器。
二、应用场景软体机器人技术的应用场景非常广泛,下面仅列举几个具有代表性的应用场景:1. 医疗领域软体机器人技术可以用于医疗领域的拍照、内窥镜和心脏手术等方面。
传统硬质机器人无法在医疗设备中实现良好的运动控制与灵活性。
而软体机器人可以适应不同的腔道,通常由一系列蠕动运动维持在体内,同时具有高精度的运动控制能力。
2. 教育领域软体机器人技术可以用于教育领域的儿童机器人和学生工程系列课程。
相对于传统的硬质机器人,软体机器人更具有趣味性和互动性,能够吸引学生的兴趣,促进学生的动手能力和创造性思维。
3. 拆除领域软体机器人技术可以用于拆除工程中的密闭空间和高空作业等场景。
软体机器人具有变形、适应性和可塑性等特点,在安全有效的拆除高楼建筑和组合设备中,软体机器人可以在狭小空间内高效灵活地操作。
纳米机器人微小世界的巨大力量
纳米机器人微小世界的巨大力量纳米技术是一项前沿科技,受到了广泛的关注和研究。
而其中最引人注目的就是纳米机器人。
纳米机器人是一种微小到几十纳米、通过控制、操作和移动原子、分子等微观物质,从而完成特定任务的机械装置。
虽然微小,但纳米机器人却拥有巨大的力量和潜力,给人类带来了无限的想象空间。
一、纳米机器人的特点纳米机器人的特点在于其微小的尺寸和精确的控制能力。
由于其尺寸远小于细胞,纳米机器人可以进入人体的组织和细胞内部,进行诊断、治疗和维修等操作。
同时,纳米机器人的操控精度高,可以通过原子级别的操作完成各种复杂任务。
这使得纳米机器人在医学、材料科学、能源、环境保护等领域有着广泛的应用前景。
二、医学领域中的应用在医学领域,纳米机器人已经展现出其巨大的力量。
首先,纳米机器人可以用于精确的肿瘤治疗。
通过将药物装载在纳米机器人上,可以将药物准确释放到肿瘤位置,减少对健康组织的伤害。
其次,纳米机器人可以用于细胞修复和组织重建。
通过纳米机器人的精确操控,可以修复破损细胞和组织,帮助人体自愈。
此外,纳米机器人还可以用于基因治疗、疾病诊断等方面,为人类的健康事业提供了前所未有的可能性。
三、材料科学中的应用纳米机器人在材料科学领域也有着广泛的应用。
首先,纳米机器人可以用于精确加工和制造。
由于其微小尺寸和精确控制能力,纳米机器人可以进行纳米级别的加工和制造,提高材料的性能和品质。
其次,纳米机器人可以用于材料的自修复。
通过纳米机器人的作用,材料表面的损伤可以得到修复,提高材料的使用寿命和稳定性。
此外,纳米机器人还可以用于功能材料的设计和合成,开创出许多新的领域和应用。
四、能源与环境保护中的应用在能源与环境保护领域,纳米机器人也具有重要意义。
首先,纳米机器人可以用于能源转换和储存。
通过纳米机器人的精确操作,可以提高能源转换效率和储存密度,推动能源技术的发展和进步。
其次,纳米机器人可以用于环境监测和治理。
通过纳米机器人的作用,可以对环境中的污染物进行准确检测和清除,改善环境质量和保护生态系统。
软体机器人在医学中的应用
软体机器人在医学中的应用随着科技的不断发展,机器人技术已经逐渐走进了我们的日常生活中,并且在各个领域中有着广泛的应用。
其中,软体机器人作为一种新兴的机器人技术,具有灵活、轻便、可变形、易于制造和控制等特点,已经成为研究的热点之一。
同时,软体机器人在医学领域中也有着广泛的应用,比如外科手术支持、内窥镜操作、洗胃和环节螺旋体感染等。
本文将从软体机器人的发展历程、医学应用研究以及未来发展方向等方面来探讨软体机器人在医学中的应用。
一、软体机器人的发展历程软体机器人的历史可以追溯到20世纪60年代初期。
当时,普林斯顿大学的心理学家乔治·米勒和匈牙利物理学家尼古劳·佩克在研究细胞和分子结构时,发现这些生物结构具备软体机器人特点。
他们发现,细胞和分子具有自我组织、自我修复、自我调节和自我学习等能力,这启发了后来的软体机器人研究,把软体机器人定义为一种能模仿细胞和分子的运动和形态的自适应智能机器人。
随着微机电系统技术、智能材料技术、机器学习技术和传感器技术的发展,软体机器人的应用领域已经成为了研究的热点之一。
二、软体机器人在医学中的应用研究1、外科手术支持软体机器人可以用于外科手术支持,对手术医生进行辅助操作,减少患者的手术创伤和疼痛。
软体机器人具有良好的柔性和变形能力,可以适应各种外科手术的需求。
例如,软体机器人可以实现肌肉组织的模拟,可以迅速适应手术医生的操作需求,帮助医生准确实现手术过程。
2、内窥镜操作软体机器人可以用于内窥镜手术中的操作,例如胃镜检查和支气管镜检查。
由于软体机器人具有良好的柔性和自我适应能力,可以在狭窄和不规则的腔道内灵活运动,避免了传统机器人的操作限制和局限性,提高了内窥镜检查的效果和准确性。
3、洗胃机器人洗胃也是一种常见的医疗操作,传统的洗胃机使用管状结构,容易造成食道黏膜的伤害和疼痛。
而采用软体机器人进行洗胃,可以减少对食道黏膜的损伤,同时具有更好的操作性,可以在狭窄和复杂的胃肠道内进行自由运动,从而提高洗胃的效果和安全性。
纳米机器人的设计和应用

纳米机器人的设计和应用随着科技的不断发展,纳米技术在各个领域都得到了广泛的应用。
其中最为引人瞩目的便是纳米机器人技术。
纳米机器人是指机器人技术在纳米级别上的应用,尺寸一般在1-100纳米之间。
由于其小巧灵活、能够自主环境适应等特点,已经被广泛地应用于生物医学、信息技术、环境监测等领域。
下面我们将具体探讨纳米机器人的设计和应用。
一、纳米机器人的设计纳米机器人的电子、机械、化学三方面都要求有足够的研究基础。
因此,纳米机器人的设计涉及到的学科范围非常广泛,其中涉及到的重要领域包括:1. 纳米级材料。
为了保证纳米机器人具有良好的性能和可靠性,设计过程中需使用优质的纳米级材料。
目前主要采用的材料包括硅、碳、金和生物大分子等。
2. 纳米机械系统。
设计纳米机器人时,必须考虑其物理和化学特性以及环境中的作用力和阻力等因素。
同时,为了保证其运行的稳定性,还需要针对性地设计机械系统来实现纳米机器人的运行和控制。
3. 纳米电子技术。
由于纳米机器人的体积极小,难以通过电线进行控制和通讯,因此需要采用纳米电子技术来实现其自主交互和通讯。
这种技术包括电子微镜、扫描电镜、微纳机械加工等。
除了这些基础设计要素外,实际的纳米机器人设计工作还涉及到对其功能的精确定义、多种任务性能特征关联度的分析和综合,以及系统参数配置和可配置性等问题。
纳米机器人设计的难点和挑战是需要综合考虑多个学科以及多个技术的需求和挑战,因此需要跨学科的研究团队展开复杂的研究工作。
二、纳米机器人的应用在生物医学、信息技术、环境监测等领域,纳米机器人得到了广泛的应用。
下面我们将从三个方面具体探讨其应用。
1. 生物医学在生物医学领域,纳米机器人的应用前景非常广阔。
纳米机器人可以通过微型机械手臂进行药物传递、细胞切开、细胞膜的打破等操作,通过各种纳米传感器对生物体的微观现象进行检测和监测。
利用纳米机器人能够达到精准的治疗和检测效果,为生物医学研究提供了新思路。
此外,纳米机器人还可以用于修复受损细胞、组织等等,为疾病治疗提供了新的路径。
软体机器人技术的进展与应用前景

软体机器人技术的进展与应用前景随着科技的不断发展,机器人技术已经成为了未来的一大趋势。
软体机器人技术更是作为机器人技术的重要分支,正在受到越来越多的关注和发展。
既然如此,我们就来看一看软体机器人技术是如何迅猛发展并且广泛应用的。
一、软体机器人技术发展的历程软体机器人技术最初是由美国的家庭机器人公司在2001年提出的。
这种机器人的主要特征是采用了柔软而有弹性的材料作为机器人的构建材料,通过各种软体结构实现各种运动和形态变化。
其它的传感器、执行器、控制系统等设备都一般的硬件机器人相同。
随着软体机器人技术的逐渐发展,它的应用范围也在逐步扩大。
它不仅仅可以用于各种工业自动化领域,如生产线上的物料输送、机械加工和包装装配等活动中,同时也可以用于人体内和外的医疗、康复和辅助生活,以及环境保护、灾难救援等人类关切的问题中。
二、软体机器人技术的优势相比较于传统的硬件机器人,软体机器人技术有以下的优势:1. 适应性强由于软体机器人的机身大多采用柔性材料,如橡胶、软质塑料等,因此在运动过程中具备非常好的柔性。
这种柔性不仅使机器人可以适应更多不同的环境和作业任务,特别是复杂的环境和任务,还可以使机器人在与人体等柔性器官的接触上更加安全和有效。
2. 抗正向撞击性能强软体机器人的机身的柔性材料在受到正向撞击时,由于材料可以吸收和分散撞击能量,所以机器人能够承受更高的撞击力量而不会产生破碎和损坏。
3. 形变能力强软体机器人可以呈现各种形状,从而具备更多的动作和体态。
这种形变能力使得机器人能够完成更多样化的作业,实现更加丰富的交互体验。
4. 操作灵活性强软体机器人的其他特点还包括可以进行复杂变形的能力,能够在不同的动作模式之间切换的灵活性,以及适应多种工作环境的能力等等。
三、软体机器人技术的应用前景由于软体机器人技术的优势,它已经被应用于许多领域,包括医疗、灾难救援、军事领域、智能制造和智能物流等。
在未来,随着技术的不断提升,软体机器人的应用前景将会更加广阔。
软体机器人

任务
03
下面我们将从几个方面详细介绍软 体机器人的特点和应用
1
材料
软体机器人的主要材料 是柔软、可变形的聚合 物或橡胶
这些材料可以承受各种 形状和压力,同时具有 很高的弹性和耐用性
这种材料可以模拟生物 体的肌肉和神经系统的 运动和传感功能,使软 体机器人具有很高的灵 活性和适应性
2
结构
软体机器人的结构通常是 由多个层组成的,包括基 础层、驱动层、传感层等
XXXXX
软体机器人
1 材料 3 应用 5 结论 7 微型生物机器人 9 柔性机器人
2 结构 4 未来发展 6 人机交互 8 环境适应型机器人
软体机器人是一种新兴的机器人技
01
术,它使用柔软、可变形的材料来
模拟生物体的运动和适应能力
这种机器人具有很高的柔韧性和可
02
塑性,可以适应各种复杂的环境和
这些层之间可以通过多种 方式相互连接,例如热压 接、熔融接等
12
+
34
其中,驱动层负责机器人 的运动和操作,传感层则 负责机器人的感知和反馈
这种结构使得软体机器人 具有很高的可塑性和可重 构性,可以根据任务的不 同进行快速的围非常广泛,包括医疗、 救援、服务等领域
➢ 总之,软体机器人在未来 具有广阔的发展前景和应 用潜力。随着技术的不断 进步和应用场景的不断扩 展,我们有理由相信软体 机器人的未来将更加美好
感谢您的观看
Thanks
8
环境适应型机器人
软体机器人的适应性和灵活 性使得它能够在极端环境下 进行工作
例如,在深海、高山、太空 等环境下,软体机器人可以 适应各种复杂的地形和压力, 完成各种任务
9
柔性机器人
软体机器人技术的研究与应用

软体机器人技术的研究与应用随着科技的不断发展和人们对人工智能的持续关注,软体机器人技术逐渐成为人们研究和开发的热门方向。
软体机器人具有柔性、变形、适应性强等特点,可以应用于医疗、教育、军事等多个领域。
本文将就软体机器人技术在不同领域的应用进行探讨。
一、软体医疗机器人软体医疗机器人是一种可以在人体内部移动和操作的机器人,常用于手术、内窥镜等方面。
相较于传统的机器人,软体机器人具有柔性和弹性优势,可以更好地适应人体内部的各种复杂环境。
近年来,随着软体机器人技术的不断提升和医疗领域的拓展,软体医疗机器人有了更广阔的应用前景。
例如,由美国密歇根大学研发的“蠕动机器人”,可以通过人体内部的通道进行操作。
其采用软体材料制成,可以自由弯折、蠕动并操控不同部位的器官。
同时,由于其柔性材料的特性,软体机器人在进入人体内部时不会造成任何损伤,可以更为安全地进行手术。
二、软体教育机器人软体教育机器人是一种可以模拟学习和教育过程的机器人,常用于机器人教育、科普宣传、文化展示等方面。
软体教育机器人不仅能够与学生进行互动和对话,而且其柔性和适应性可以更好地模拟现实生活的场景,帮助学生更好地了解机器人技术。
例如,由国内企业研制的软体机器人熊猫,可以进行各种体式的变形,模拟熊猫的各种动作和表情,形象生动。
同时,它还具有可编程性,可以根据不同的任务进行编程,为学生提供更多的机器人学习体验。
三、软体军事机器人软体军事机器人是一种可以适应不同战场环境的机器人,常用于侦查、炸弹拆除等方面。
软体机器人具有变形、适应性、轻量化的特点,可以更好地适应战场环境和执行任务。
例如,由美国防部研发的“可爱机器人”项目,目的是研发一种可以在战场上执行各种任务的柔性机器人。
该项目采用软体材料制成,可以在冲击、切割、穿透等情况下仍然保持完整。
该机器人还可以变形,适应不同的环境和任务,具有很强的实用性和适应性。
总之,软体机器人技术在医疗、教育、军事等多个领域中的应用越来越广泛。
软体机器人设计和控制
软体机器人设计和控制软体机器人是一种在机器人技术领域中比较新的概念,与传统的硬体机器人不同,软体机器人的主要构造材料是柔性材料,往往采用基于水平或无骨架的结构,可以模仿生物体,能够充分适应复杂环境中存在的不确定性因素,具有出色的柔性和灵活性。
本文将从软体机器人设计和控制两个方面来介绍软体机器人的概念、特点、应用和未来展望。
一、软体机器人的特点1.具有高度柔性和可变形性软体机器人的主要材料是柔性材料,它可以承受被弯曲、拉伸、扭曲以及压缩等多种形变,并能在恢复形状的过程中存储和释放能量。
因此,它可以有效地适应各种不同形状的环境以及执行各种不同的任务。
2.适应性强软体机器人的柔性和可变形性使得它可以适应各种不同的环境和工作场景。
比如在海底的研究、医疗领域内,软体机器人可以轻松地穿过生物体内的狭窄通道来进行治疗或者检测。
3.具有很好的鲁棒性软体机器人的柔性让它具有很好的鲁棒性,可以承受碰撞、变形等各种外力对其的干扰。
因此,在吸附任务,军事作战,特殊环境探索等领域有着广泛的应用前景。
二、软体机器人的设计1.软体机器人的结构类型根据结构形式,软体机器人主要可以分为基于水平的结构和基于无骨架的结构两种类型。
基于水平的结构是在柔性外壳内部填充一定的液体或气体,当外壳受到外力影响时,对液体或气体的压力变化会导致外壳的形状进行变形。
无骨架的结构是由一系列的连续柔性片材制成,可弯曲和旋转,因此在形状变化方面的灵活性更高。
2.材料性能的影响软体机器人的设计的一个重要方面就是选择合适的材料,目前主流的软体机器人采用的主要材料有硅胶、聚氨酯和液晶弹性体等等。
材料的选择对机器人的柔性和可变形性有很大的影响。
3.关键技术:软体机器人的模型设计和仿真在软体机器人的设计中,软体机器人的模型设计和仿真是很重要的工作。
借助计算机,利用一些基于有限元、多体动力学和松弛动力学的仿真工具,可以更好地模拟、设计和优化软体机器人的表现。
三、软体机器人的控制技术1.软体机器人的操纵系统软体机器人的操纵系统是其控制的重要组成部分。
软体机器人报告
软体机器人报告1. 概述软体机器人是一种基于软体材料制作的机器人。
与传统的刚性材料机器人相比,软体机器人具有更高的柔韧性和适应性。
软体机器人的材料可以是柔软的橡胶、塑料或者是充满液体的气囊等。
软体机器人的特殊材料赋予了其处理复杂环境和与人类进行亲密互动的能力。
本文将介绍软体机器人的原理、应用和未来发展方向。
2. 原理软体机器人的原理基于软体材料的柔韧性和可变形性。
软体材料具有高度的变形能力,可以实现复杂的形状变化和运动。
软体机器人利用气囊、弹性材料或可塑性材料作为主要结构,通过调节内部气体或液体的压力来实现运动控制。
软体机器人的运动方式可以是爬行、游泳、扭曲或变形。
软体机器人的控制方法可以是传统的刚体机器人控制,例如使用电机和传感器来实现。
此外,还可以采用自适应控制方法,利用软体特性来实现更灵活的控制。
软体机器人的控制算法可以使用神经网络、遗传算法或其他机器学习方法来优化。
3. 应用软体机器人具有广泛的应用前景,特别是在一些特殊环境和任务中。
以下是软体机器人的一些应用领域:3.1 医疗领域软体机器人在医疗领域可以用于内窥镜手术、微创手术和康复治疗等。
由于软体机器人具有柔软性和适应性,可以更轻松地进入人体内部,减少手术对患者的损伤。
同时,软体机器人可以根据不同患者的情况进行形状变化,提供更精确的治疗。
3.2 救援与灾害响应软体机器人可以在救援和灾害响应中发挥重要作用。
由于软体机器人具有较高的柔韧性和适应性,可以适应不同的地形和环境。
软体机器人可以用于搜救被困人员、探测搜寻物品或测量地面情况。
3.3 工业自动化软体机器人在工业自动化中可以承担重复性和危险性高的任务。
软体机器人由于柔韧性和可变形性可以适应不同形状和物体的抓取和操作。
此外,软体机器人还可以与人类工作人员协同工作,提高工作效率。
3.4 智能家居软体机器人可以用于智能家居中的各种任务。
例如,软体机器人可以用于清洁、服务和安全等方面。
由于软体机器人具有与人类进行亲密互动的能力,因此可以成为家庭成员的助手和伴侣。
软体机器人原理

软体机器人原理软体机器人是一种由软体材料组成的机器人,其外形和结构灵活多变,可以模拟生物体的运动和变形。
软体机器人的基本原理涉及软体材料的特性、传感器与执行器的设计以及控制算法的开发。
下面将详细解释与软体机器人原理相关的基本原理。
1. 软体材料软体机器人的最大特点就是采用了柔软的材料,与传统机器人的硬件结构形成鲜明对比。
软体材料可以是弹性材料、聚合物或者液体等,其主要特性包括柔韧性、可变形性和可塑性。
•柔韧性:软体材料具有较高的柔韧性,可以实现多种形状和变形。
这使得软体机器人可以适应各种复杂环境和任务需求。
•可变形性:软体材料可以通过改变其形状和结构来实现不同的功能。
通过控制软体机器人的内部气体或液体的流动,可以使其变形成为不同的形状。
•可塑性:软体材料可以通过加热、冷却或者施加压力等方式改变其硬度和形状。
这使得软体机器人可以在不同的工作环境中适应不同的力学要求。
软体材料的特性使得软体机器人具有较好的适应性和灵活性,可以在狭小空间中穿梭、适应不规则形状的工作环境,并且在与人类或其他物体的接触中具有较好的安全性。
2. 传感器与执行器设计软体机器人的传感器用于感知外部环境和自身状态,执行器用于控制机器人的运动和变形。
传感器和执行器的设计对于软体机器人的功能和性能至关重要。
2.1 传感器设计软体机器人的传感器设计需要考虑以下几个方面:•形变传感器:软体机器人的形状和变形对于其功能和任务至关重要,因此需要搭载形变传感器来感知形状和变形。
形变传感器可以是压力传感器、应变传感器或者光学传感器等,用于测量机器人的形变程度和形状。
•环境感知传感器:软体机器人在执行任务时需要感知外部环境,以便做出相应的反应。
环境感知传感器可以是摄像头、红外传感器或者超声波传感器等,用于感知障碍物、距离和环境条件等。
•位置和姿态传感器:软体机器人需要知道自身的位置和姿态,以便进行精确的控制和定位。
位置和姿态传感器可以是加速度计、陀螺仪或者磁力计等,用于测量机器人的位置和方向。
软体机器人综述

软体综述软体综述1、简介该文档旨在对软体进行全面综述,介绍其定义、应用领域、技术原理、发展趋势等内容。
2、定义软体是指具有柔软身体结构和类似生物组织的,其设计灵感源自人类和动物的运动机制。
与传统硬体相比,软体拥有更高的适应性和柔软性。
3、应用领域3.1 医疗领域软体在医疗领域中具有广泛的应用前景。
它们可以应用于手术操作辅助、康复治疗和药物输送等领域,带来更安全、精确和有效的医疗服务。
3.2 制造业软体在制造业中的应用主要体现在柔性制造和组装方面。
柔软的身体结构使软体能够灵活适应不同形状的工件,并完成高精度的组装任务。
3.3 探索与救援软体在探索与救援任务中发挥着重要作用。
它们可以适应不同的环境,并在狭窄、危险或无法人类到达的地方执行任务,如地震救援和火灾侦测等。
4、技术原理4.1 柔软身体结构软体采用柔软的身体结构,通常由弹性材料制成。
这种结构使其能够承受外部压力和变形,并具备类似动物的运动特性。
4.2 传感技术软体通过传感器获取外部环境信息,如压力、温度和湿度等。
这些传感器可以帮助做出反应并适应不同情况。
4.3 控制系统软体的控制系统负责对其运动进行控制和协调。
控制系统通常包括算法、电子和软件等组成部分,使能够执行各种任务。
5、发展趋势5.1 柔软材料的发展随着柔软材料技术的不断发展,软体的身体结构将更加逼真和灵活,为其在各个领域的应用提供更多可能性。
5.2 机器学习的应用机器学习技术的应用将使软体能够根据环境和任务需求进行学习和调整,提高其自主性和适应性。
5.3 人机协作软体与人类的协作将成为未来发展的一个重要方向。
通过与人类紧密合作,软体可以在各种任务中发挥更大的优势。
6、附件本文档附有相关文献引用、案例分析和技术图表等信息。
请查阅附件获取更详细的内容。
7、法律名词及注释7.1 伦理学伦理学是研究与人类和社会之间的道德和伦理问题的学科领域。
7.2 专利法专利法是一种法律制度,保护创新性和新颖性发明的权益,为发明者提供一定的独占权。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《Nature》发布毫米级软体机器人,为人类研究体内
微型机器人提供新思路
导读
1966 年着名作家艾萨克·阿西莫夫出版了一部着名的科幻小说《梦幻旅行》,讲述了通过科学手段把人缩小到了细胞大小,在人体内经历了梦幻般的冒险。
这部小说启发了很多科学家,虽然我们很难把真人缩小到细胞大小,但制作一个微型机器人代替人类进入体内完成作业还是完全可行的。
所以一直以来,微型机器人、软体机器人成为科学研究的热点,我们都期盼机器人能听从指挥的到达人体指定位置,在对人体危害最小的情况下递送药物或者切除病变组织。
日前,英国着名期刊《Nature》上便发布了一款由德国马普智能系统研究所研制的磁控软体机器人,或许它能为人类研究体内微型机器人提供新思路。
这是一段长3.7 毫米、宽1.5 毫米、厚185 微米的长方体机器人。
别小看这个外表上看起来黑乎乎的小方片,它能在磁场的控制下,像软体动物一样完成各种指定动作。
比如在水下或水面游泳、卷成圆圈滚动、跳过障碍物、在细管中爬行,灵活切换各种运动形式等等。
这款机器人的主体材料为硅胶,内嵌具有磁性的汝铁硼微颗粒,颗粒的平均直径为5 微米。
机器人表面是防水的,也可以被处理成生物相容材料。
机。