让MapX在64位下飞起来
电脑飞起来的操作方法

电脑飞起来的操作方法电脑飞起来是一种科技幻想,但在现实生活中,我们可以通过一些技术手段来模拟这种效果。
下面就介绍一些操作方法,来实现电脑飞起来的效果。
第一种方法是通过特效合成软件进行操作。
可以使用类似于Adobe After Effects这样的软件来实现电脑飞起来的效果。
首先,需要准备一个背景素材,比如一片蓝天白云的图片或者视频。
然后将电脑的图像素材导入到软件中,对电脑进行适当的分层和遮罩处理,然后应用适当的动画特效,比如位移特效和旋转特效,使得电脑在背景下飞行起来。
通过对图像的位置、速度和角度等参数进行调整,可以达到比较逼真的效果。
第二种方法是通过虚拟现实技术来实现。
可以利用类似于Unity3D或者Unreal Engine这样的游戏引擎软件来创建一个虚拟世界,然后在其中加入一个飞行场景,将电脑的模型导入到虚拟场景中,并添加适当的物理引擎属性,比如重力和空气阻力等,然后通过用户的操作或者脚本控制,使得电脑在虚拟世界中飞行起来。
通过合理的设计和调整,可以创造出高度逼真的飞行效果。
第三种方法是通过无人机技术来实现。
可以利用无人机技术来模拟电脑飞行的效果。
将一个小型无人机改装成电脑的外观,然后通过遥控器或者自动控制程序,使得无人机在空中飞行起来。
通过对无人机的悬停、飞行路径和姿态等参数进行控制,可以实现电脑仿真飞行的效果。
第四种方法是通过增强现实技术来实现。
可以利用类似于ARKit或者ARCore 这样的增强现实技术平台来创建一个虚拟的电脑模型,并将其与现实场景进行叠加和交互,在用户的移动和操作下,电脑的模型可以仿佛在空中飞行一样,达到一种虚拟飞行的效果。
综上所述,实现电脑飞起来的效果是一种多种技术手段相结合的操作方法,需要利用到特效合成、虚拟现实、无人机和增强现实等技术。
通过合理的设计和操作,可以创造出非常逼真的电脑飞行效果,为观众带来前所未有的科技体验。
随着技术的不断创新和发展,相信未来还会有更多更精彩的电脑飞行表演呈现在我们面前。
win764位旗舰版下安装虚拟xp
win7 64位旗舰版下安装虚拟xp——肖坚倾情制作史上最完整的图文教程尼玛有木有啊最近小弟手贱,买了盘AutoCAD,阔是纠结蛋疼的是小弟买的32位,尼玛安装不上在64位旗舰版win7上啊,有木有!!!奶奶的再买一般的话劳资买不起啊,尼玛贵啊,偶系学生啊有木有,木有钱啊有木有!只有在win7上面装个神奇的XP虚拟机啊!好吧,不扯了,让我们开始装吧!巴扎嘿。
1.开装准备:1.下载Microsoft Virtual PC(这个是人家微软弄得东东,比别的兼容好那个是肯定滴,注意:一定要下载64位的,32位的尼玛用不了啊)。
2.下载一个Microsoft Virtual PC这个玩意儿的中文包,不想下没事儿,你的英语一定要过六级!尼玛劳资四级都没过!3.下载一个XP的系统ISO的,你懂的!2.开装了:1.看那个图片把那个我setup 64bit.exe运行下(这个就是Virtual PC 2007),然后再把vpc2007-chs那个压缩吧解压,运行下那里面的可执行程序,安装路径和Virtual PC 2007的安装路径一样,那个就是汉化中文简体包!2继续:上面的步骤执行完了就可以继续了。
运行Virtual PC 2007。
照我给的图上面的圈点击。
尼玛啥意思不要问,我会告诉你吗?下面点击语言,选择中文简体,然后ok!总之照图点就好了!然后就关闭程序!重新打开!你聚会看到熟悉的中文界面了!加载虚拟光盘文件:1.点击新建按钮,然后选择新建一台虚拟机。
下一步。
2.点击更改分配内存大小,按照你电脑的情况分配就好!然后下一步!3.点击新建虚拟硬盘,这个是你的虚拟机的总磁盘,从你的硬盘里面取!按照你的情况来分配,一般不少于5G,最多不超多30G为宜!4.点击启动:5.出现下图画面就点击CD,再选择载入ISO映像,这个要选择的就是你下载的XP安装包!6.选择你下载的xp系统!7:过一会会就这样了,很神奇吧,这个不用改变启动顺序哈!8.下面有安装系统经验的童鞋就可以很顺畅的进入PE安装系统了,偶也!9.下面就是低端的装系统了,我就只贴几张图了不解释了哈!安装好那一刹那木有截下图额,失误失误!5分钟系统安装好了,奶奶的好特么快啊!尼玛一会会就进去了,好神奇啊,巴扎嘿!安装好了以后,你要让你的虚拟Xp上网要选择好网络适配器!点击那个Microsoft Virtual PC标题栏的编辑,点击设置!然后选择网络适配器,再选择能上网的网卡,点击确定!你的虚拟XP就可以上网了!3.好了,截止目前,这个XP的虚拟机算是彻底的安装好了! 各种软件,各位看客可以在网上下载!如有疑问请咨询肖坚短号64397!自愿安装,后果自负!!!。
HP MINI 说明书

4 Internet 连接到无线网络 .................................................................................................................................. 20 使用无线设备 ..................................................................................................................... 20 识别无线网络图标 ............................................................................................. 20 使用无线控制 ..................................................................................................... 20 使用无线设备开关 ............................................................................................. 20 使用 WLAN ........................................................................................................................ 20 设置 WLAN ........................................................................................................ 21 保护 WLAN ........................................................................................................ 21 连接到 WLAN .................................................................................................... 22
弹弹堂走路飞天代码

弹弹堂走路飞天代码弹弹堂是一款风靡一时的网页游戏,吸引了大量玩家。
在这款游戏中,玩家可以体验到丰富的战斗模式和可爱的角色。
本文将介绍一款走路飞天代码,帮助玩家在游戏中获得更多乐趣。
走路飞天代码的原理是利用游戏内的坐标系统,实现角色的空中行走。
通过修改游戏内存,将角色坐标从地面改为空中,从而实现走路飞天的效果。
以下是代码的使用方法:1.打开弹弹堂游戏,进入任意房间。
2.打开代码编辑器,如Notepad++或Visual Studio。
3.将以下代码复制并粘贴到代码编辑器中:```public class Main {public static void main(String[] args) {// 修改此处为你的游戏窗口宽度int gameWidth = 770;// 修改此处为你的游戏窗口高度int gameHeight = 600;// 获取游戏窗口句柄HWND hwnd = FindWindow("Valve001", "");int playerX = 0;int playerY = gameHeight - 64;// 走路飞天循环while (true) {// 获取游戏内存地址IntPtr playerAddress = GetAddressOfName(hwnd, "Player");// 读取角色坐标int readX = ReadInt(playerAddress + 0x34);int readY = ReadInt(playerAddress + 0x38);// 计算偏移量int offsetX = (readX - playerX) * 0.001f;int offsetY = (readY - playerY) * 0.001f;// 更新角色坐标playerX += offsetX;playerY += offsetY;if (playerX < 0) playerX = 0;if (playerY < gameHeight - 64) playerY = gameHeight - 64;if (playerX > gameWidth) playerX = gameWidth;if (playerY > gameHeight) playerY = gameHeight;// 写入角色坐标WriteInt(playerAddress + 0x34, playerX);WriteInt(playerAddress + 0x38, playerY);// 延迟更新频率Thread.Sleep(10);}}// 获取窗口句柄public static IntPtr GetAddressOfName(IntPtr hwnd, string name) {int processId = GetWindowThreadProcessId(hwnd);IntPtr hProcess = OpenProcess(PROCESS_VM_READ | PROCESS_VM_WRITE | PROCESS_VM_OPERATION, false, processId);IntPtr address = NULL;ReadProcessMemory(hProcess, hwnd, ref address);CloseHandle(hProcess);return address;}// 读取整数public static int ReadInt(IntPtr address) {byte[] buffer = new byte[4];ReadProcessMemory(GetCurrentProcess(), address, buffer, 4);return BitConverter.ToInt32(buffer, 0);}// 写入整数public static void WriteInt(IntPtr address, int value) {byte[] buffer = BitConverter.GetBytes(value);WriteProcessMemory(GetCurrentProcess(), address, buffer, 4);}}```4.修改代码中的游戏窗口宽度和高度,使其与你的游戏窗口匹配。
mobula6 恢复参数

mobula6 恢复参数全文共四篇示例,供读者参考第一篇示例:Mobula6是一款飞行器,它在市场上备受欢迎,因其小巧轻便,但是性能强大。
它是FPV无人机种类之一,提供了一种刺激和兴奋的飞行体验。
有时候飞行器会出现一些问题,比如飞行参数不正确。
在这种情况下,我们需要对Mobula6进行参数恢复。
接下来,我们将详细介绍如何对Mobula6进行参数恢复。
在对Mobula6进行参数恢复之前,我们需要准备一些必要的工具和材料。
我们需要一台电脑或者笔记本电脑,这样我们才能连接到Mobula6的飞行控制器,并进行参数的调整。
我们需要一根Micro USB数据线,用于连接Mobula6和电脑。
我们还需要一个LED灯,用于指示恢复参数的进度。
接下来,我们将介绍如何对Mobula6进行参数恢复的具体步骤。
我们需要将Mobula6断电,并且将电池取出。
然后,我们需要用Micro USB数据线将Mobula6连接到电脑上,并且打开Betaflight软件。
在Betaflight软件中,我们需要找到“CLI”选项,并且输入以下命令:“diff”或者“dump”。
这样,我们就可以将飞行参数保存到电脑上。
对Mobula6进行参数恢复并不复杂,只需要按照以上步骤进行即可。
但是在进行参数恢复之前,我们需要备份好原有的飞行参数,以防止出现意外情况。
希望以上内容能够帮助大家更好地了解如何对Mobula6进行参数恢复,让飞行体验更加稳定和顺畅。
第二篇示例:mobula6 是一款非常受欢迎的迷你无人机产品,它拥有轻便小巧的机身设计和稳定飞行性能,深受飞行爱好者的喜爱。
尽管mobula6 拥有出色的性能和功能,但在长时间使用后可能会出现一些问题,比如飞行姿态不稳定、飞行时间减少等。
这时候,我们就需要对mobula6 进行恢复参数,以恢复其正常性能。
恢复参数是指通过重新设置mobula6 的参数,使其恢复到出厂设置状态,从而解决在使用过程中出现的问题。
64位win7下讯飞5的使用方法

64位win7下讯飞5的使用方法
经过一天的反复试用,终于弄明白了,软件要能登陆论坛才能看到。
但具体设置可参考我的方法。
语音合成系统运行库安装:
1、解压运行库到你的电脑任何一处,记住要解压到电脑上
2、打开Runtime Demo文件夹
3、运行Runtime Demo-Chinese(PRC).mis
4、解压文本限制破解,从安装目录中找出与解压出的文件同名同属性的文件,并用解压出的文件替换它。
5、安装语音库,打开语音库压缩文件,解压。
运行setup.exe安装语音库
6、如果你想用CSSML编辑器,iFlyTTS.dll文件要到网上另外下载。
将iFlyTTS.dll文件粘贴到x:\\Program Files\\iFly Info Tek\\InterPhonic 5.0\\bin文件夹里并在CSSML编辑器的查看--选项--语音合成运行库设成iFlyTTS.dll文件。
ok。
如果是win7x64,安装完第三步后按下操作:
尝试了一下,果然是这的问题
具体不多说,解决方法如下:
1打开注册表项【HKEY_LOCAL_MACHINESOFTWAREWow6432NodeiFly Info TEK】
2右键导出
3用记事本编辑导出注册表项,搜索【Wow6432Node】并直接替换掉(别键入字符,空格也不行)
4双击确定合并,然后就可以了
此方法只针对64位win7系统,其他未测试,另外这个只是在确
定正常安装了运行库的前提下才能保证成功,以上
TTS引擎、11111
E:\\InterPhonic 5.0\\bin\tsknl.dll。
MapX培训教程-(含多场景)

MapX培训教程引言MapX是一款强大的地图制作和地理信息系统(GIS)软件,广泛应用于地图制作、空间数据分析、地图发布等领域。
为了帮助用户更好地了解和掌握MapX的使用方法,本教程将详细介绍MapX的基本操作、功能模块和实际应用案例。
通过本教程的学习,用户将能够熟练使用MapX进行地图制作和空间数据分析,为工作和研究提供有力的支持。
第一章:MapX概述1.1MapX简介MapX是一款基于Windows操作系统的地图制作和地理信息系统软件,由美国Intergraph公司开发。
MapX提供了丰富的地图制作和空间数据分析功能,支持多种地图投影和坐标系,可以处理各种类型的地理数据。
1.2MapX的特点(1)强大的地图制作功能:MapX提供了丰富的地图制作工具和符号库,可以制作高质量的地图。
(2)灵活的空间数据分析:MapX支持多种空间分析功能,如缓冲区分析、叠加分析、网络分析等。
(3)易于使用的界面:MapX的界面直观易用,用户可以快速上手。
(4)与其他软件的兼容性:MapX可以与其他GIS软件和办公软件无缝集成,方便数据交换和共享。
第二章:MapX基本操作2.1安装和启动用户需要从官方网站MapX安装包,并按照提示完成安装。
安装完成后,双击桌面上的MapX图标即可启动软件。
2.2地图制作(1)打开地图文件:“文件”菜单,选择“打开”,在弹出的对话框中选择地图文件(.mxd)。
(2)添加图层:“图层”菜单,选择“添加图层”,在弹出的对话框中选择需要添加的图层。
(3)调整图层顺序:在“图层”面板中,拖动图层上下移动,以调整图层顺序。
(4)设置图层样式:在“样式”面板中,选择合适的符号和颜色,为图层设置样式。
(5)添加标注和图例:“标注”菜单,选择“添加标注”,在地图上添加标注。
“图例”菜单,选择“添加图例”,在地图上添加图例。
(6)保存和输出地图:“文件”菜单,选择“保存”,将地图保存为.mxd文件。
“文件”菜单,选择“输出”,将地图输出为图片或PDF 文件。
ardupilot设置指南
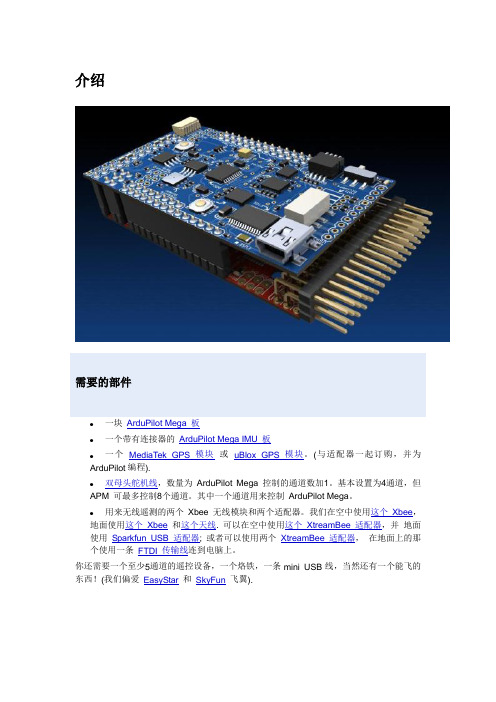
介绍需要的部件∙一块ArduPilot Mega 板∙一个带有连接器的ArduPilot Mega IMU 板∙一个MediaTek GPS 模块或uBlox GPS 模块。
(与适配器一起订购,并为ArduPilot编程).∙双母头舵机线,数量为ArduPilot Mega 控制的通道数加1。
基本设置为4通道,但APM 可最多控制8个通道。
其中一个通道用来控制ArduPilot Mega。
∙用来无线遥测的两个Xbee 无线模块和两个适配器。
我们在空中使用这个Xbee,地面使用这个Xbee和这个天线. 可以在空中使用这个XtreamBee 适配器,并地面使用Sparkfun USB 适配器; 或者可以使用两个XtreamBee 适配器,在地面上的那个使用一条FTDI 传输线连到电脑上。
你还需要一个至少5通道的遥控设备,一个烙铁,一条mini USB线,当然还有一个能飞的东西!(我们偏爱EasyStar和SkyFun飞翼).方法仔细阅读说明书!某一天自驾仪将成为一个能在沃尔玛买到的即插即用设备,但可惜不是现在。
飞行器各不相同,而作为一个开源项目我们尽可能支持广泛的硬件配置。
这就意味着在飞行之前你必须配置自驾仪。
一旦你配置好,你还需要根据自己的飞机来调整自驾仪。
采用循序渐进的方法,也就是说,首先处理基本问题,每次只改变一到两个设置,然后测试是否合适,在进行下一项调整。
另外重要一点是只有在理解之后再做尝试。
在还没有良好理解和阅读注意事项之前使用使用默认设置。
反复阅读基本章节。
保留以前的版本,这对排除问题是很有用的,或者也可以恢复到以前正常工作的版本。
如果存在疑问,在飞真机之前使用模拟器!连接到电脑上APM 使用一条miniB USB 数据线。
如下所示插到板子上:当吧你的APM 用USB 数据线连到电脑上时,Windows 7 将识别FTDI USB转串口芯片并安装正确的驱动。
如果没有识别,或者你使用早期版本的Windows,你需要从这里下载和安装正确的驱动。
MapX教程

详细介绍MapX提供的三维 可视化功能,包括三维场 景构建、三维符号制作、 三维飞行等。
阐述在MapX中构建三维场 景的方法和步骤,包括地 形数据加载、建筑物模型 导入、纹理贴图等。
介绍如何使用MapX的三维 符号制作工具创建自定义 的三维符号,以满足特定 应用场景的需求。
演示如何在MapX中实现三 维飞行模拟功能,包括飞 行路径规划、视角控制、 动态效果展示等。
问题三
数据导入或导出失败
• 解决方案
检查数据格式是否正确,确保导入或导出路径有效。对 于复杂的数据转换,建议使用MapX提供的数据转换工 具。
使用技巧分享,提高工作效率
01
技巧一:快捷键使用
02
• 通过学习和掌握MapX的常用快捷键,可以大大提高工 作效率。例如,使用Ctrl+C和Ctrl+V进行复制和粘贴 ,Ctrl+Z进行撤销等。
1. 在MapX中打开一个新 的地图文档;
导入矢量数据
01
03 02
数据导入方法及步骤演示
3. 在弹出的对话框中选择要导入的矢 量数据文件,点击“打开”;
4. 根据需要设置坐标系和其他参数, 点击“确定”完成导入。
数据导入方法及步骤演示
导入栅格数据 1. 在MapX中打开一个新的地图文档; 2. 选择“文件”菜单下的“导入”选项;
03
数据导入、导出与处理
Chapter
支持的数据格式类型
矢量数据格式
如Shapefile、GeoJSON、KML等;
栅格数据格式
如GeoTIFF、ECW、MrSID等;
数据库格式
如PostGIS、SQL Spatial等。
Server
Spatial、Oracle
DSP跑飞时定位方法说明
DSP跑飞时定位方法说明V1.0 2012年xx月xx日经过内部讨论归档目录1引言 (3)1.1 编写目的 (3)2问题定位方式 (3)2.1 使用串口察看DSP跑飞的位置 (3)2.2 通过OM系统日志查看DSP死机原因 (4)2.3 当跑飞在被大量调用的公共函数(如MEMCPY、MEMSET)时的进一步定位 (6)2.4 通过G D D E RROR L OG察看错误告警定位问题 (8)1 引言1.1 编写目的为后续能够更好更快的定位测试中出现的DSP跑飞问题,将定位过程总结起来供大家参考使用。
2 问题定位方式2.1 使用串口察看DSP跑飞的位置驱动调试信息都记录在驱动的Uint32 gDdDebugInfo[1024]里面,起始地址0xC0100000,每个调试计数都是32BIT,按照偏移位置存储各种调试计数的信息,例如,从0xC0100000,第0到7个32BIT存储的是各个核的状态信息,第8到15个32BIT存储的是各个核出现致命错误告警时的错误附加信息等等,我们常用的几个调试信息起始位置如下://各个核状态,共6个32BIT,0xA5A5A5A5-正常,0x80xx00yy-OSE致命错误,其他-初始化记录。
#define MDD_DRIVER_DEBUG_DRV_LOG_OFFSET 0//每个核出现致命错误告警时的错误附加信息,共6个32BIT。
#define MDD_DRIVER_DEBUG_DRV_EXT_OFFSET 8//每个核出现致命错误告警时的最后一次切换信息,共6个32BIT,每个核的格式为[16BIT From:16BIT To]。
#define MDD_DRIVER_DEBUG_DRV_SWP_OFFSET 16//每个核非法地址访问时的程序指针,共6个32BIT。
#define MDD_DRIVER_DEBUG_OCE_PCR_OFFSET 24因此,在dsp跑飞时,可通过在串口使用read_dsp_memory来查看调试计数信息,串口命令如下:-> ff = malloc(512)->-> read_dsp_memory 0,0xc0100000,ff,128->-> d ffNOTE: memory values are displayed in hexadecimal.0xc174e950: 5a5a 5a5a a5a5 a5a5 a5a5 a5a5 a5a5 a5a5 *0...............*0xc174e960: a5a5 a5a5 a5a5 a5a5 0000 0000 0000 0000 *................*0xc174e970: 0000 0000 0000 0000 0000 0000 0000 0000 *................*0xc174e980: 0000 0000 0000 0000 0000 0000 0000 0000 *................*0xc174e990: 0000 0000 0000 0000 0000 0000 0000 0000 *................*0xc174e9a0: 0000 0000 0000 0000 0000 0000 0000 0000 *................*0xc174e9b0: 580c 5f4c 0000 0000 0000 0001 0000 0000 *................*0xc174e9c0: 0000 0000 0000 0000 0000 0000 0000 0000 *................*通过从串口察看到的驱动调试信息中,我们可以看到,核0的状态异常,跑飞的位置为0x580c5f4c。
2024年MapInfo+MapX培训教程

MapInfo+MapX培训教程一、引言地理信息系统(GIS)作为处理、分析、展示地理空间数据的重要工具,已经在多个领域得到了广泛应用。
MapInfo和MapX是两款具有代表性的GIS软件产品,它们凭借强大的功能、友好的界面和易用性,成为了众多用户的首选。
本教程旨在帮助读者快速掌握MapInfo和MapX的基本操作,为深入学习和应用奠定基础。
二、MapInfo基础操作1.软件安装与启动(1)MapInfo正式版安装包;(2)按照提示完成安装过程;(3)启动MapInfo,熟悉软件界面。
2.地图操作(1)打开地图:通过“文件”菜单或工具栏打开地图文件;(2)地图浏览:使用工具栏上的放大、缩小、平移等工具进行地图浏览;(3)地图显示设置:调整图层显示顺序、设置图层透明度等;(4)地图输出:将地图导出为图片或其他格式。
3.数据操作(1)创建数据表:新建数据表,设置字段类型和属性;(2)数据导入:将外部数据导入MapInfo,如Excel、CSV 等;(3)数据编辑:添加、删除、修改数据表中的记录;(4)数据查询:通过SQL语句查询数据表中的信息。
4.空间分析(1)缓冲区分析:为地图上的对象创建缓冲区;(2)叠加分析:将两个图层进行叠加,分析空间关系;(3)网络分析:计算地图上的路径、距离等。
三、MapX基础操作1.软件集成与调用(1)在开发环境中安装MapX插件;(2)通过编程接口调用MapX功能;(3)熟悉MapX控件及其属性、方法、事件。
2.地图操作(1)加载地图:将地图文件加载到MapX控件中;(2)地图浏览:实现地图的放大、缩小、平移等操作;(3)地图显示设置:调整图层显示顺序、设置图层透明度等;(4)地图输出:将地图导出为图片或其他格式。
3.数据操作(1)创建数据表:在MapX中新建数据表,设置字段类型和属性;(2)数据导入:将外部数据导入MapX,如Excel、CSV等;(3)数据编辑:添加、删除、修改数据表中的记录;(4)数据查询:通过SQL语句查询数据表中的信息。
TerraExplorer Pro v7.0用户操作手册-2019v1.0

4.1
启动界面 ......................................................................................................................... 13
4.2
界面布局 ......................................................................................................................... 13
3.1
TerraExplorer 7.0.1 版本新特性 .......................................................................................8
3.1.1 栅格图层改进 ............................................................................................................ 8
3.2.6 分析工具..................................................................................................................10
3.2.7 使用 SkylineGlobe Server– 发布工具 .....................................................................10
1.1
关于本手册 ....................................................................................................................... 1
谷歌地图飞行模拟器指南
使用飞行模拟器您可以在Google 地球中使用飞行模拟器功能飞遍地球。
它可让您使用鼠标或其他控制器控制模拟飞机。
进入飞行模拟器要进入飞行模拟器,请执行以下操作之一:∙点击工具> 进入飞行模拟器∙按Ctrl + Alt +A(在Mac 机上是+ Option + A)“飞行模拟器”对话框随即出现。
您需要选择以下各项:∙飞机- 按显示的描述选择您想要驾驶的飞机。
SR22 是一架速度比较慢的飞机,很适合初学者。
∙出发位置- 选择您想要开始飞行的位置。
∙操纵杆支持- 如果您想使用的计算机上有操纵杆设备,请选中并启用操纵杆。
要更改这些设置,退出飞行模拟器并按Ctrl +Alt +A(在Mac 机上是+ Option + A)查看飞行模拟器帮助要随时查看此页面,请按Ctrl + H(仅适用于Windows 和Linux)。
退出飞行模拟器要退出飞行模拟器,请执行以下操作之一:∙点击退出飞行模拟器∙按Ctrl + Alt +A 或Escape(在Mac 机上是+ Option + A 或Escape)。
驾驶您的飞机飞行进入飞行模拟器后,平视显示器(HUD) 随即出现:1速度(节点)2方位3倾斜角度4垂直速度(英尺/分钟)5退出飞行模拟器功能6油门7方向舵8副翼9升降舵10襟翼及起落架指示器11俯仰角(度)12海拔高度(高出海平面英尺数)要隐藏或显示HUD,请按H 键。
您可以使用操纵杆或鼠标控制飞行模拟器功能。
要使用鼠标,请在屏幕中心点击鼠标,使光标变为+(十字)。
您随时可以按空格栏暂停或继续飞行模拟器。
要起飞,请先按Page Up 键增加推动力,并将飞机移动到跑道上。
飞机开始移动后,将鼠标或操纵杆轻微向后下方移动。
有足够速度后,就可以起飞了。
要更改方向或倾斜飞机,请使用鼠标或操纵杆进行小幅移动。
请注意不要矫枉过正。
机翼保持水平状态后,将鼠标或操纵杆置中。
要查看四周,请按箭头键+Alt(慢)或Ctrl(快)。
APMPIX飞行模式注解

APMPIX飞行模式注解1、稳定模式Stabilize稳定模式是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应该使用此模式。
此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行的首选,也是FPV第一视角飞行的最佳模式。
一定要确保遥控器上的开关能很方便无误地拨到该模式,应急时会非常重要。
2、比率控制模式Acro这个是非稳定模式,这时apm将完全依托遥控器遥控的控制,新手慎用。
3、定高模式ALT_HOLD定高模式(AltHold)是使用自动油门,试图保持目前的高度的稳定模式。
定高模式时高度仍然可以通过提高或降低油门控制,但中间会有一个油门死区,油门动作幅度超过这个死区时,飞行器才会响应你的升降动作当进入任何带有自动高度控制的模式,你目前的油门将被用来作为调整油门保持高度的基准。
在进入高度保持前确保你在悬停在一个稳定的高度。
飞行器将随着时间补偿不良的数值。
只要它不会下跌过快,就不会有什么问题。
离开高度保持模式时请务必小心,油门位置将成为新的油门,如果不是在飞行器的中性悬停位置,将会导致飞行器迅速下降或上升。
在这种模式下你不能降落及关闭马达,因为现在是油门摇杆控制高度,而非马达。
请切换到稳定模式,才可以降落和关闭马达。
4、悬停模式Loiter悬停模式是GPS定点+气压定高模式。
应该在起飞前先让GPS定点,避免在空中突然定位发生问题。
其他方面跟定高模式基本相同,只是在水平方向上由GPS进行定位。
5、简单模式SimpleMode简单模式相当于一个无头模式,每个飞行模式的旁边都有一个SimpleMode复选框可以勾选。
勾选简单模式后,飞机将解锁起飞前的机头指向恒定作为遥控器前行摇杆的指向,这种模式下无需担心飞行器的姿态,新手非常有用。
6、自动模式AUTO自动模式下,飞行器将按照预先设置的任务规划控制它的飞行由于任务规划依赖GPS的定位信息,所以在解锁起飞前,必须确保GPS已经完成定位(APM板上蓝色LED常亮)切换到自动模式有两种情况:如果使用自动模式从地面起飞,飞行器有一个安全机制防止你误拨到自动模式时误启动发生危险,所以需要先手动解锁并手动推油门起飞。
dragonfly使用

dragonfly使用Dragonfly是一款拥有强大功能的开源操作系统内核,它是由Matt Dillon博士创建的,主要用于FreeBSD操作系统的开发。
Dragonfly 的设计目标是提高操作系统的可用性和稳定性,其拥有许多先进的特性和优化,是许多细节处理方面的先驱。
Dragonfly的特点1.分层虚拟内存设计Dragonfly采用分层虚拟内存设计,目的是为了提高系统的可用性和运行稳定性。
这种设计的好处是可以隔离出内核和用户空间容器,防止应用程序进行恶意操作导致系统崩溃,从而加强了系统的稳定性和可靠性。
2.高性能的FS缓存和I/O系统Dragonfly拥有非常高效的文件系统缓存设计,因此其在文件读写上非常快速。
而在I/O方面,Dragonfly采用了一种异步的I/O模型,能够实现读写磁盘同时进行,从而极大地提高了系统的性能和效率。
3.基于消息传递的架构Dragonfly的内核设计采用了基于消息传递的架构,这种架构下,各个模块之间的通信是通过消息传递来实现,这种方式具有很高的可伸缩性和容错性。
4.内存完整性保护在Dragonfly操作系统内核中,所有的内存访问都是通过页表完成的。
页表具有干净的权限控制和内存映射,从而可以保障系统的内存安全和完整性。
5.高可用和可伸缩性Dragonfly拥有非常高的可用性和可伸缩性,这得益于其分层虚拟内存设计、I/O异步模型、消息传递架构等优化,从而可以实现无限的可伸缩性。
Dragonfly的应用场景1.高性能服务器Dragonfly操作系统内核采用的优化技术,使其在高性能服务器领域强有力。
其高效的FS缓存和I/O系统,能够提供更好的磁盘访问速度,从而对高性能服务器的数据处理能力进行提升。
2.嵌入式系统Dragonfly操作系统内核的设计非常模块化和可定制化,这与嵌入式系统的要求是非常相符的。
Dragonfly针对嵌入式系统,在内核和软件上都做了大量的优化设计,保证其可以在资源受限的嵌入式设备上运行良好。
2018年mapx指导书-精选word文档 (7页)
本文部分内容来自网络整理,本司不为其真实性负责,如有异议或侵权请及时联系,本司将立即删除!== 本文为word格式,下载后可方便编辑和修改! ==mapx指导书篇一:MAPX5.0用SetupFactory打包完全教程MAPX5.0用SetupFactory打包完全教程由于前些日子有些朋友对MAPX打包有点问题,所以今天做个打包的教程,希望对大家有用。
其实我也是参照资源大联盟的老公的打包说明来做的,只是我用的不是InstallShield打的包,我用的是setupfactory,应该来说这个要比专业的InstallShield简单多了,好了,不多说了,接下来我就对于我的《电子地图查询系统》打个包,做个演示。
说明《电子地图查询系统》是用基于MAPX5.01用VB6语言开发的系统,没有涉及到数据库。
第一步:找全所有需要打包的文件。
需要打包的文件很多,我们先建个文件夹,把所有需要打包的文件放里面,比如我建的文件夹:F:\setup。
打包的文件主要有1. MAPX文件MAPX5.0文件夹下的所有文件(不包括data、MAPS以及程序示例的文件夹,当然也可以把MAPX5的帮助文件也删掉),最后文件如图所示:2.程序所用到的控件和动态连接库为了方便起见,我们在SETUP文件夹下建个SYSTEM文件夹,所有的控件和动态连接库都放这里。
由于用VB6开发,所以MSVBVM60.DLL是必不可少的。
我用到的其他控件有Comdlg32.ocx、MSCOMCTL.OCX、TABCTL32.OCX。
把这些都复制到SYSTEM文件夹。
可以自己检查用了什么控件,控件在什么位置(一般都在系统的SYSTEM32目录下)。
如图:3.自己做的程序以及相关的文件由于我做的比较简单,只有一个运行程序,关联的文件主要是地图文件,我们直接把这些文件拷贝到SETUP文件夹下。
4.其他相关其实只需要上面的文件就可以了,如果需要更完整的话,需要以下一些文件。
apm飞控入门教程

Apm飞控较为详细的入门教程最近发现很多模友在看了泡泡老师的视频有很多细节没有看懂在群上提问,为了能使刚用上apm的模友一步到位,再来一个文字教程帮助你们快速使用。
在此也感谢apm2.8交流群中的冷风群主提供的教程~废话不多说了硬件安装1、通过USB接口供电时,如果USB数据处于连接状态,APM会切断数传接口的通讯功能,所以请不要同时使用数传和USB线连接调试APM,USB接口的优先级高于数传接口,仅有供电功能的USB线不在此限;2、APM板载的加速度传感器受震动影响,会产生不必要的动差,直接影响飞控姿态的计算,条件允许请尽量使用一个减震平台来安装APM主板;3、APM板载的高精气压计对温度的变化非常敏感,所以请尽量在气压计上覆盖一块黑色海绵用来遮光,以避免阳光直射的室外飞行环境下,光照热辐射对气压计的影响。
另外覆盖海绵,也可以避免飞行器自身气流对气压计的干扰。
使用建议对于初次使用APM自驾仪的用户来说,建议你分步骤完成APM的入门使用:1、首先安装地面站控制软件及驱动,熟悉地面站界面的各个菜单功能;2、仅连接USB线学会固件的下载;3、连接接收机和USB线完成APM的遥控校准、加速度校准和罗盘校准;4、完成各类参数的设定;5、组装飞机,完成各类安全检查后试飞;6、PID参数调整;7、APM各类高阶应用地面站调试软件Mission Planner安装首先,MissionPlanner的安装运行需要微软的Net Framework 4.0组件,所以在安装Mission Planner之前请先下载Net Flamework 4.0并安装安装完NetFramework后开始下载Mission Planner安装程序包,最新版本的Mission Planner可以点击此处下载,下载页面中每个版本都提供了MSI版和ZIP版可供选择。
MSI 为应用程序安装包版,安装过程中会同时安装APM的USB驱动,安装后插上APM的USB 线即可使用。
MapX自动漫游功能的实现

自动漫游功能的实现有以下二种思路:1、地图可以任意缩放,因此,飞机在飞行过程中可能位于显示界面之外,可以手动漫游使飞机显示在屏幕中心,但这种方法不利于地面站自动化程度的提高。
为了保证飞机位置一直可见,设计中添加了自动漫游选项,当飞机位于地图显示部分之外时,地图自动漫游,保证飞机位于屏幕中心。
MapX中自带了地图可见范围的边界特征属性,分别为m_ctrlMapX.GetBounds().GetXMax()、m_ctrlMapX.GetBounds().GetYMax()、m_ctrlMapX.GetBounds().GetXMin()和m_ctrlMapX.GetBounds().GetYMin(),把接收的经纬度信息与之相比较,如果超出范围就使飞机位于屏幕中心位置。
关键代码如下:CMapXRectangle rectLast;rectLast=m_ctrlMapX.GetBounds();double dbXMax=rectLast.GetXMax();double dbXMin=rectLast.GetXMin();double dbYMax=rectLast.GetYMax();double dbYMin=rectLast.GetYMin();if((aa>dbXMax)||(aa<dbXMin)||(bb>dbYMax)||(bb<dbYMin)){m_ctrlMapX.SetCenterX(aa);m_ctrlMapX.SetCenterY(bb);}2、首先通过函数GetZoom()获得当前电子地图的缩放度,再利用函数ZoomTo (double Zoom,double X,double Y)实现对指定坐标(X,Y)为中心,指定缩放度Zoom的自动漫游。
这样一来,在接收到坐标点(X,Y)的同时可以将目标一直保持在地图中心显示,实现自动漫游。
云峰V64快速安装指南说明书

V1.0V64Quick Installation GuideFanvil Technology Co.,LtdScreen iconKeysfeaturesDSS Keys,It canbesetaslinekey/functionkey/speed dialkey,etc.SoftkeysMessagewaitingindicatorLeft andright navigation keysUp navigation key,Shortcut to call logDown navigation key,Shortcut to StatusOK key,Shortcut to MenuHome key,go back to HomepageReturn key,go back to the previousdirectoryPhonebook keyVoice message keyIn idle mode or during ringing:increase ordecrease ringer volumeIn communication:increase or decreasehandset,headset or hands-free volumeHeadset key,activate/deactivate headsetIn idle mode:activate/deactivate silentmodeIn communication mode:mute/un-mute acallRedial key,access to redial the last recordHand-free key,activate/deactivate handsfreeHandset Cord Ethernet Cable Quick Installation Guide IP Phone Handset StandPower Adapter(Optional)Wall Stand(Buy separately)In hands-free mode Call forward activated New SMS Dialed call(s)In headset modeDisable do not disturb(Beige)New VM messages Internet connected In handset modeDo not disturbactivated(Red)Voice quality level ofcallInternet isdisconnected Mute activated SIP hotspot activated Keypad locked No IP addressSilent mode VLAN activated Forward call(s)Wireless networkconnected Call is on hold VPN activated Missed call(s)Wireless networkdisconnected Auto-answeringactivatedBluetooth devicepaired connectionReceived call(s)Wireless networkfailurePackaging listPlease follow the instructions in below picture to install the device.●Bracket desktopinstallation●Wall mounting (wall stand need buyseparately)Connecting to the devicePlease connect power adapter,network,PC,handset,and headset to the corresponding ports as described in below picture.①USB port:connect USB device (USB flash drive)②Power port:connect the power adapter.③Network port:connecting local area network or internet.④PC port:the network port connect to the computer.⑤Headset port:connect headset.⑥Handset port:connect IP Phonehandset..Using Ethernet1.The power on the device and connect the WAN port of the phone to the RJ45socket of a hub/switch or a router (LAN side of the router)using the Ethernet cable.2.The default is DHCP ing WiFi1.The power on the device and make sure the phone is idle.2.Press Menu >Basic >WLAN,Enabled the WiFi Feature.3.Press scan to search for currently available wireless network.4.Enter the available network and select the WiFi you want to connect.5.Press connect soft key and enter the appropriate password to connect to the WiFi.The default is DHCP mode.ConfigurationConfiguration via LCD menu of phone1.Press Menu >Advanced (default password 123)2.Select Network:To configure the Network Settings (IPv4/IPv6/IPv4&IPv6,DHCP/Static/PPPoE).3.Select Accounts:To configure enable the account,fill the SIP server address,port,user name,password etc.4.Save the configuration.Configuration via web1.Get the IP address from the phone:Press down navigation key,or Menu >Status >IPv4/IPv6.2.Login:Input the IP address in the web browser.The PC and phone should be in the same IP address segment (The default username and password are both ‘admin’.)3.Configure:Select network/account etc,and fill the relevant content.4.Save the configuration.Language setting1.Press Menu key >Basic >Language.2.Select the desired language and press OK soft key.Making a call1.Pre-dialing:enter the phone number and pick up the handset.2.Direct dialing:lift the handset and enter the phone number.3.Handsfree:enter phone number and press or vice versa.4.Headset:enter phone number and press or vice versa.5.Designated line:press line key,enter phone number and press dial key.Accepting a call1.Using the handset:pick up the handset.2.Using the headset:press .3.Using the handsfree:press .1.Press key,redial a call number.1.Press to Mute the microphone during the call.2.Press again to un-mute the conversation.1.Press Hold soft key,caller is put on hold.2.To retrieve the call press Resume soft key.Note:with more than one active call,select desired call with the navigator key and use the corresponding soft key to hold or resume. Attended transfer:1.Press Xfer soft key during the active conversation,the call is put on hold.2.Dial the second telephone number.3.When the call is answered,then press Xfer soft key to complete the operation.Blind transfer:1.Press Xfer soft key during the active conversation,the call will be on hold.2.Then enter the2nd telephone number and press Xfer soft key. 1.Press Menu>Features>Call Forward.2.Select the line,the type of forward,enter the destination number and status,and press OK soft key.1.Once in line with1st caller,press Conf soft key,1st caller is put on hold.2.Then call the2nd number.3.After,2nd call is established,press Conf soft key to set up the conference.1.You can configure shortcuts for the programmable keys. 2.Press Menu>Basic>Keyboard,select among the configurable items,and select your desired type and value,press OK key. 1.Press DND soft key,and enable the device do not disturb mode. 2.Or press Menu>Features>DND,and select the Mode and Type, and press OK key.1.To access your voice mailbox,press or Menu>Message> Voice Message,number of messages will be indicated if provided by your server or pbx.2.Select the line and press Play to call.1.Press Menu>Basic>Bluetooth.2.Press OK soft key to enter the bluetooth open interface.After opening,press Scan soft key to display the list of bluetooth scanned. Select any device and press connect.1.Press Menu>Basic>WLAN.2.Press OK soft key to enter the WLAN open interface.After opening,press Scan soft key to display the list of Wi-Fi scanned. 3.Press Enter soft key to enter the available Network,select the wireless network,press the Connect soft key and enter the password to connect.1.Press up navigator key or Menu>CallLog>Local Call Logs 2.Scroll through the list using navigator key.3.To dial an entry,press Dial soft key or pickup handset or press or.Access Phonebook:1.Press or Contact soft key or Menu>PhoneBook>Local Contacts.2.Select All Contacts or other group.3.To dial an entry,press Dial soft key or pickup handset or press or.Add new entry:1.Press Contact soft key,Press All Contacts or other group>Press Add.2.Enter name and number and press OK soft key.Regulatory ComplianceFederal Communication Commission(FCC)—USAThis device complies with Part15of FCC Rules.Operation is subject to the following two conditions:(1)this device may not cause harmful interference,and(2)this device must accept any interference received;including interference that may cause undesired operation.This equipment has been tested and found to comply with the limits for a Class B digital device,pursuant to Part15of the FCC Rules.These limits are designed to provide reasonable protection against harmful interference in residential installation.This equipmentgenerates,uses,and can radiate radio frequency energy,and if it is not installed and used in accordance with the instruction manual,itmay cause harmful interference to radio communications.However,there is no guarantee that interference will not occur in a particular installation.If this equipment does cause harmful interference to radio or television reception,which can be determined by turning theequipment off and on,the user is encouraged to try to correct the interference by one or more of the following measures:•Reorient or relocate the receiving antenna.•Increase the separation between the equipment and receiver.•Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.•Consult the dealer or an experienced radio/TV technician for help.Warning:Any changes or modifications to this unit not expressly approved by the party responsible for compliance could void theuser’s authority to operate the equipment.This equipment complies with FCC radiation exposure limits set forth for an uncontrolled environment.This equipment should be installed and operated with minimum distance of20cm between the radiator and your body.This transmitter must not be co-located or operating in conjunction with any other antenna or transmitter.This equipment complies with Part68of the FCC rules and the requirements adopted by the ACTA.On the bottom of thisequipment is a label that contains,among other information,a product identifier in the format US:3I1IPNANV64.If requested,this number must be provided to the telephone company.Industry Canada Equipment Standard for Digital Equip-ment(ICES)—CanadaThis Class B digital apparatus complies with Canadian ICES-003.Cet appareil numérique de la classe B est conformeàla norme NMB-003du Canada.Innovation,Science and Economic Development(ISED)—CanadaThis device contains licence-exempt transmitter(s)/receiver(s)that comply with Innovation,Science and Economic Development Canada’s licence-exempt RSS(s) .Operation is subject to the following two conditions:(1)This device may not cause interference.(2)This device must accept any interference,including interference that may cause undesired operation of the device.L’émetteur/récepteur exempt de licence contenu dans le présent appareil est conforme aux CNR d’Innovation,Sciences et Développementéconomique Canada applicables aux appareils radio exempts de licence.L’exploitation est autorisée aux deux conditions suivantes:(1)L’appareil ne doit pas produire de brouillage;(2)L’appareil doit accepter tout brouillage radioélectrique subi,même si le brouillage est susceptible d’en compromettre le fonctionnement.This equipment complies with ISED radiation exposure limits set forth for an uncontrolled environment.This equipment should be installed and operated with minimum distance of20cm between the radiator and your body.Cetéquipement est conforme aux limites d’exposition aux rayonnements ISEDétablies pour un environnement non contrôlé.Cetéquipement doitêtre installéet utiliséavec un minimum de20cm de distance entre la source de rayonnement et votre corps.This device and it’s antennas(s)must not be co-located or operating in conjunction with any other antenna or transmitter except in accordance with IC multi-tra nsmitter product procedures.Cet appareil et son antenne(s)ne doit pasêtre co-localisés ou fonctionnement en association avec une autre antenne ou transmetteur.This product meets the applicable Innovation,Science and Economic Development Canada technical specifications.Le présent produit est conforme aux spécifications techniques applicables d’Innovation,Sciences et Développementéconomique Canada.Fanvil Technology Co.,LtdWebsite:EMail:**********************************Tel:+86-755-2640-2199Fax:+86-755-2640-2618Add:10/F Block A,Dualshine Global Science Innovation Center,Honglang North2nd Road,Bao'an District,Shenzhen,China。