并联机器人综述(英文经典),Parallel kinematics
六自由度并联机器人简介

六自由度并联简介六自由度并联简介1、概述1.1 介绍六自由度并联是由六个自由度的运动链构成的系统。
它具有较大的工作空间和高精度的姿态控制能力,被广泛应用于工业自动化、医疗手术和科学研究等领域。
1.2 组成六自由度并联由底座、连杆链、末端执行器和控制系统组成。
底座是系统的基础部分,连杆链由六个连杆和连接它们的关节组成,末端执行器用于完成具体的任务,控制系统用来控制的运动和姿态。
1.3 工作原理六自由度并联通过控制各个关节的运动,实现末端执行器的多自由度运动。
它利用逆运动学和正运动学方法,根据所需的末端执行器位置和姿态计算各个关节的运动参数,从而实现所需的运动。
1.4 应用领域六自由度并联广泛应用于各个领域,包括工业自动化、医疗手术、科学研究等。
在工业自动化中,它可以用于装配、搬运和焊接等任务;在医疗手术中,它可以用于精确的手术操作;在科学研究中,它可以用于实验室操作和精密测量等。
1.5 优势和挑战六自由度并联具有较大的工作空间、高精度的姿态控制能力和多自由度的运动能力,能够完成复杂的任务。
然而,它也面临着运动学反解难题、运动参数优化和控制精度等挑战。
2、结构设计2.1 运动链设计六自由度并联的运动链设计需要考虑的工作空间、负载要求和运动学特性等因素。
运动链的设计通常采用刚性杆件和关节连接的方式,确保的刚性和稳定性。
2.2 关节设计关节是六自由度并联运动链中的重要组成部分,关节的设计需要考虑承载能力、转动范围和精度等因素。
通常采用电机和减速器组成的驱动系统来实现关节的运动控制,并配合传感器进行反馈控制。
2.3 连杆设计连杆是六自由度并联运动链中的连接部件,连杆的设计需要考虑刚性、轻量化和可靠性等要求。
通常采用高强度材料,采用优化设计和仿真分析等方法来提高连杆的性能。
2.4 末端执行器设计末端执行器是六自由度并联的最终工作部件,它根据具体任务的要求来设计。
末端执行器通常包括夹爪、工具或传感器等,可以完成抓取、加工和测量等任务。
6PRRS并联机器人关键技术
决策系统在机器人运动控制、任务执行、人机交互等方面发挥着重要作用,使得机器人能够根据任务需 求和环境变化进行自主决策和控制。
6PRRS并联机器人的感知与决策优化
感知与决策优化的必 要性
6PRRS并联机器人的感知与决策优化 对于提高机器人的运动性能、任务执 行效率和自主性具有重要意义。通过 对感知和决策系统的优化,可以提高 机器人的感知精度、反应速度和控制 精度,实现更高效的任务执行和更灵 活的运动控制。
6PRRS并联机器人的决策系统
决策系统组成
6PRRS并联机器人的决策系统由控制器、执行器和其他辅助设备组成,用于接收感知系统的信息,根据任务需求和机 器人的运动状态,进行决策和控制。
决策系统原理
决策系统根据感知系统提供的信息,结合机器人的运动学和动力学模型,进行任务规划和路径规划,生成控制指令并 传递给执行器,实现机器人的运动控制和任务执行。
性能评估与优化
01
根据实际应用场景,建立性能评估指标,并对控制算法进行优
化以提高机器人的运动性能。
鲁棒性改进
02
针对环境变化和不确定性因素,提高控制系统的鲁棒效率优化
03
在实现精确控制的同时,考虑降低能耗和提高效率,以实现绿
色和可持续的机器人运动。
06
6PRRS并联机器人实验与验证
6PRRS并联机器人关键技术
汇报人: 日期:
目 录
• 并联机器人概述 • 6PRRS并联机器人结构与设计 • 6PRRS并联机器人运动学与动力学 • 6PRRS并联机器人感知与决策 • 6PRRS并联机器人控制策略 • 6PRRS并联机器人实验与验证
01
并联机器人概述
并联机器人的定义与特点
并联机器人(Parallel Robot)
并联机器人综述论文

并联机器人综述论文院系:聊城大学东昌学院机电工程系专业:机械设计制造及其自动化班级:10本二姓名:姜丽梅学号:20100020749并联机器人综述论文摘要并联机器人是一类全新的机器人,它具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,在21世纪将有广阔的发展前景。
本文根据掌握的大量并联机器人文献,对非对称3平动3UPU并联机器人在运动学、动力学、机构性能分析等方面的主要研究成果、进展进行了阐述,同时阐述了非对称3平动3UPU并联机器人在国内外的发展状况以及并联机器人构型设计原则关键词平动 3自由度并联机器人一、课题国内外现状及研究的主要成果少自由度并联机器人由于其驱动元件少、造价低、结构紧凑而有较高的实用价值,更具有较好的应用前景,因此少自由度的并联机器人的设计理论的研究和应用领域的拓展成为并联机器人的研究热点之一。
研究少自由度并联机构最早的学者应属澳大利亚著名机构学教授 Hunt ,在1983年,他就列举了平面并联机构、空间三自由度3-rps并联机构,但对四,五自由度并联机构未作详细阐述。
在Hunt之后,不断有学者提出新的少自由度并联机构机型。
在少自由度并联机构机型的研究中,三维平移并联机构得到广泛的重视。
clavel提出了一种可实现纯平运动三自由度Delta 并联机器人,在Delta机构的支链中采用平行四边形机构约束动平台的3个转动自由度。
Tsai提出的Delta机构完全采用回转副,并通过转轴的偏移扩大了Delta机构的工作空间。
在 Tricept并联机床上采用的构型是由 Neumann发明的一种具有3个可控位置自由度的并联机构,该机构的突出特点是带有导向装置,采用3个内副驱动支链并由导向装置约束动平台。
Tsai 通过自由度分析提取支链的运动学特征,系统研究了并联机构的综合问题,特别研究了一类实现三自由度平动的并联机构。
Rasim Alizade于2004年提出基于平台类型和联接平台的形式和类型进行分类的一种并联机构的结构综合和分类的新方法和公式,并综合出具有单平台和多平台的纯并联和串并联复联机构.我国燕山大学的黄真教授及其团队除了研制出解耦微型6维力传感器和微动机械,设计出一种新的高精度的机构方案外,还率先对少自由度并联机器人的基础理静刚度和精度.上海交大的高峰教授2002年运用复合副的概念来组合已知自由度数和自由度类型的支链,通过支链输出杆特殊的Plucker坐标来综合2-自由度的机器人。
并联机器人
并联正文:1.简介本文档是一个并联的详细说明,包括的结构、工作原理、控制系统等方面的内容。
2.结构2.1 机械结构并联的结构由多个关节和连杆组成,其中关节连接主要的动力元件,连杆连接各个关节。
机械结构的设计需要考虑的运动范围、负载能力以及稳定性等因素。
2.2 末端执行器并联的末端执行器通常包括夹爪、工具等,用于完成特定的任务,如抓取、装配等。
3.控制系统并联的控制系统主要包括硬件和软件两个部分。
3.1 硬件硬件部分包括传感器、驱动器和控制器。
传感器用于对的姿态、位置等进行测量,驱动器用于驱动机械结构的关节,控制器则用于运行控制算法并实施控制策略。
3.2 软件软件部分包括运动规划、路径规划等算法的开发与实现。
通过软件控制,可以使在特定的工作空间内完成精确的运动任务。
4.工作原理并联通过控制系统的指令实现工作任务,其工作原理基于运动学和动力学原理。
的工作过程需要考虑运动学约束、静力学约束等因素。
4.1 运动学的运动学描述的位置和姿态之间的关系。
运动学约束主要包括正向运动学和逆向运动学。
4.2 动力学的动力学描述在外部力作用下的运动学特性。
动力学约束主要包括速度和加速度的限制。
5.应用领域并联广泛应用于汽车制造、航空航天、医疗卫生等领域。
的高精度、高效率和精确性使其成为许多工业任务的理想选择。
附件:本文档涉及的附件包括相关设计图纸、算法代码等。
法律名词及注释:1.并联:由多个关节和连杆组成的结构,具有高度精确性和高效率的特点。
2.运动学:描述的位置和姿态之间的关系的科学。
3.动力学:描述在外部力作用下的运动学特性的科学。
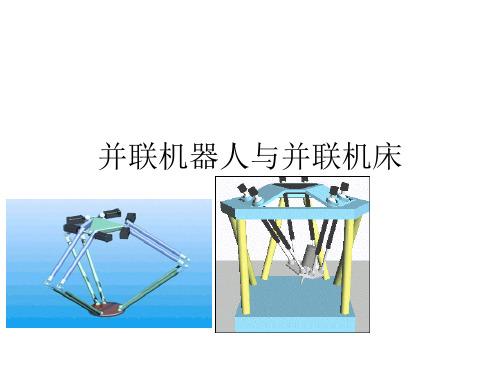
并联机构与并联机器人
1931年Gwinnett的娱乐装置 (5D电影)
1965年Stewart机构
•
1985法国克拉维尔(Clavel)教授 设计出delta并联机构(或称为delta 机器人)
按自由度分类
• • • • •
•
(1 )2 自由度并联机构。 (2 )3 自由度并联机构。 (3 )4 自由度并联机构。 (4 )5 自由度并联机构。 (5 )6 自由度并联机构。(如Stewart机构、双Delta嵌套机构)
• 在Delta原型基础上,研究人员做了很多衍 生机型。
FANUC六轴机器人
• 三轴铰接式手腕(专利 产品)+delta机器人 • 优点:1、末端增加3个 旋转自由度,可以适用 更复杂工况 • 2、速度更快每秒2000度 的速度拾取、旋转和放 置物体 • 缺点:有效负载降低。 第一代最大负载0.5kg, 目前最大载荷可达6kg。
• 并联机器人组成:一个固定基座、一 个具有n自由度的末端执行器以及不 少于两条独立的运动链。 • 并联机器人特点: (1)无累积误差,精度较高; (2)驱动装置可置于定平台上或接近定 平台的位置,这样运动部分重量轻, 速度高,动态响应好; (3)结构紧凑,刚度高,承载能力大; (4)完全对称的并联机构具有较好的各 向同性; (5)工作空间较小;
其中2、3自由度并联机构中存在平面机构这一特殊情况,研究难度降低很多, 较多地被人们研究和使用。 6 自由度并联机构是并联机器人机构中的一大类,是国内外学者研究得最多 的并联机构,广泛应用在飞行模拟器、6维力与力矩传感器和并联机床等领域。 但这类机构有很多关键性技术没有或没有完全得到解决,比如其运动学正解、 动力学模型的建立以及并联机床的精度标定等。
•
• 为了满足越来越复杂的工作需求,研究和使用多自由度 (3~6)的空间机构显示出一定的必要性。 • 近年来, 国内外机构型研究主要集中在多自由度多支链并 联机器人构型问题上。并联机构的结构属于空间多环多自 由度机构。并联机构的构型综合是一个极具挑战性的难题。 到目前为止, 国内外主要有四种并联机构的型综合研究方 法, 即基于螺旋理论的给定末端运动约束的型综合法、基 于李代数的型综合法、基于给定末端运动的型综合法和列 举型综合法。
并联位移机器人的外文文献翻译、中英文翻译、外文翻译
附录:并联位移机器人的设计Jacques M.HERVEECELE CENTRALE PARIS92295 CHATENAY MALABRY CEDEXFRANCE摘要:本文目的是对偶具有人性化机器人的应用做一个完全的介绍,并将着重讨论并行机器人特别是那些能够进行空间平移的机器人。
在许多工业的应用过程中这种机器人被证明其末端执行器在空间上的定位是没必要的。
这个方法的优点是我们能系统地导出能预期得到位移子群的所有运动学链。
因此,我们调查了机器人的整个家族。
T-STAR机器人现在就是一台工作装置。
而H-ROBOT,PRISM-ROBOT是新的可能的机器人。
这些机器人能满足现代生产快节奏工作中价格低以及符合挑选的工作环境,如选料、安排、包装、装配等发日益增长的需求。
关键词:运动学,并行机器人引言群论可以运用于一系列位移当中。
根据这个理论,如果我们能够证明群{D}包含所有的可能的位移,那么{D}就具有群结构。
刚体的最显著运动是由群{D}表现出来的。
这方法导致机械装置的分类 [1]。
建立这样的一个分类的主要的步骤是将位移群的所有子群导出。
这能通过检验所有具有旋转和平移特性的[2]产品直接推理出。
然而,一个更有效的方法存在于假设群论[3],[4]中。
假设群论是在取决于许多有限实参数的全纯映射的基础上定义的。
位移群{D}是六维假设群的一个特例。
假设理论在假设群论的框架内,我们将用于补偿李代数的微元变换与通过其前面幂运算得到的有限运算结合起来。
连续群通过与群微元变换有关的微分幂运算描述出来。
另外,群体特性通过微分运算及其逆运算所得到的李代数的代数结构而得到了解释。
让我们回忆一下李代数主要的定义公理:一个李代数是一个具有封闭乘积的反对偶称双线性的矢量空间。
众所周知 [5],螺旋速度场是在给定点N的条件下通过运算得到的一个六维的矢量空间。
由下面[3]中步骤表明,我们能得完整的欧几里得位移{D}子群列表(见大纲表1)。
并联机器人简介介绍
医疗领域
并联机器人在医疗领域可用于 辅助手术、康复训练以及精确 的医疗设备定位等。
科研与教育
并联机器人还可用于科研机构 的实验研究以及教育领域的教
学和培训。
并联机器人的发展历程
初期探索
20世纪70年代,并联机器人概念开始萌芽,研究人员开 始探索其运动学和动力学特性。
技术突破
80年代至90年代,随着计算机技术和控制理论的发展, 并联机器人的设计、分析和控制技术取得了重要突破。
特点
高刚度、高精度、高负载能力、结构紧凑、动态响应快等。由于并联机器人的 这些特点,它们在许多领域都得到了广泛应用。
并联机器人的应用领域
制造业
并联机器人在制造业中用于高 精度装配、焊接、切割、打磨 等作业,提高生产效率和产品
质量。
航空航天
由于并联机器人具有高刚度和 高精度特点,它们在航空航天 领域被用于飞机和卫星的精密 装配与检测。
控制系统
并联机器人的工作原理基于先进 的控制系统,通过计算机或控制 器对各个关节进行精确的协调和
控制。
运动学逆解
在工作过程中,控制系统根据目 标位置和姿态,通过运动学逆解 算法计算出各个关节的需要到达
的位置。
动力学控制
控制系统根据机器人的动力学模 型,通过控制算法实现机器人平 稳、快速的运动,并确保机器人
并联机器人在汽车制造、重型机械等需要承受较大负载的行业中,能够发挥很好 的应用效果。
紧凑的结构设计
空间占用
并联机器人采用紧凑的结构设计,使得其在空间占用上相对 较小,有利于节省生产现场的空间资源。
灵活布局
紧凑的结构设计使得并联机器人能够灵活地适应各种生产布 局,提高生产线的整体效率和灵活性。
机械手 外文文献及翻译

body dynamic and yields the input current vector of the servovalve, the dynamic gravity term including the gravity of platform, load and hydraulic cylinders is used to compensate the influence of gravity of parallel manipulator platform. 入电流矢量的伺服阀,动态重力项包括重力平台,负载和液压缸,用于补偿重力的影响,对并联机器人平台。
In analytical, the steady state errors converge asymptotically to zero, independent of load variation. 在分析,稳态误差渐近收敛于零,独立的负载变化。
The model-based controller, PD control with gravity compensation, is developed to reduce the effect of load variety of platform and eliminate steady state error of hydraulic driven parallel manipulator. 基于模型的控制器,控制重力补偿,以减少开发影响负载多种平台和消除稳态误差的液压驱动并联机器人。
MATHEMATICAL MODEL 数学模型The 6-DOF hydraulic driven parallel manipulator consist of a fixed base (down platform) and a moveable platform (upper platform) with six cylinders supporting it, all the cylinders are connected with movement platform and base with Hooke joints, as shown in Fig.1. 六自由度液压驱动并联机器人包括一个固定基地(下)和一个可移动的平台(平台)六缸支持它,所有气缸的运动平台和基地连接万向接头,如图1所示。
并联机器人-文献综述

并联机器人综述引言并联机器人是一类全新的机器人,它具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,在21世纪将有广阔的发展前景。
本文根据掌握的大量并联机器人文献,对其分类和应用做了简要分析和概括,并对其在运动学、动力学、机构性能分析等方面的主要研究成果、进展以及尚未解决的问题进行了阐述。
第一章并联机构的发展概况1.1并联机构的特点并联机构是一种闭环机构,其动平台或称末端执行器通过至少2个独立的运动链与机架相联接,必备的要素如下:①末端执行器必须具有运动自由度;②这种末端执行器通过几个相互关联的运动链或分支与机架相联接;③每个分支或运动链由惟一的移动副或转动副驱动。
与传统的串联机构相比,并联机构的零部件数目较串联构造平台大幅减少,主要由滚珠丝杠、伸缩杆件、滑块构件、虎克铰、球铰、伺服电机等通用组件组成。
这些通用组件可由专门厂家生产,因而其制造和库存备件成本比相同功能的传统机构低得多,容易组装和模块化。
除了在结构上的优点,并联机构在实际应用中更是有串联机构不可比拟的优势。
其主要优点如下:(1)刚度质量比大。
因采用并联闭环杆系,杆系理论上只承受拉、压载荷,是典型的二力杆,并且多杆受力,使得传动机构具有很高的承载强度。
(2)动态性能优越。
运动部件质量轻,惯性低,可有效改善伺服控制器的动态性能,使动平台获得很高的进给速度与加速度,适于高速数控作业。
(3)运动精度高。
这是与传统串联机构相比而言的,传统串联机构的加工误差是各个关节的误差积累,而并联机构各个关节的误差可以相互抵消、相互弥补,因此,并联机构是未来机床的发展方向。
(4)多功能灵活性强。
可构成形式多样的布局和自由度组合,在动平台上安装刀具进行多坐标铣、磨、钻、特种曲面加工等,也可安装夹具进行复杂的空间装配,适应性强,是柔性化的理想机构。
(5)使用寿命长。
由于受力结构合理,运动部件磨损小,且没有导轨,不存在铁屑或冷却液进入导轨内部而导致其划伤、磨损或锈蚀现象。
并联机器人综述

并联综述并联综述1.简介1.1 背景并联是指由多个机械臂以并联的方式连接在一起,通过共享载荷、合作操作的一种系统。
其具有高刚性、高精度、高承载能力等特点,被广泛应用于工业自动化领域。
1.2 目的本文旨在介绍并联的基本概念、结构组成、工作原理以及应用领域,以便读者能够全面了解并联的特点和优势。
2.结构组成2.1 机械臂并联的核心部件是机械臂,通常由多个关节组成。
每个关节都装有驱动器和传感器,用于控制机械臂的运动和感知周围环境。
2.2 连杆和连杆驱动系统机械臂之间通过连杆连接,连杆驱动系统用于控制连杆的运动,从而实现机械臂的协同运动。
2.3 控制系统控制系统是并联的大脑,通过控制算法和传感器反馈信号,实现对机械臂的精确控制。
3.工作原理3.1 平台运动并联的机械臂通过连杆和关节传递力和运动,实现平台的运动。
平台的运动可以是平移或旋转,取决于机械臂的结构。
3.2 协作操作通过控制系统的协调控制,多个机械臂能够实现协作操作。
例如,可以通过分担负荷的方式,提高的承载能力;或者通过协同动作,完成复杂的任务。
4.应用领域4.1 制造业并联在制造业中被广泛应用于装配、焊接、喷涂等工序,能够提高生产效率和产品质量。
4.2 医疗领域并联在医疗领域中被用于手术操作,具有高精度、稳定性好的优点,减轻了医生的劳动强度。
4.3 物流领域并联在物流领域中能够完成货物的搬运、分拣等工作,提高了物流效率。
4.4 其他领域并联还可以应用于航空航天、冶金、矿山等领域,发挥更多的作用。
5.附件本文档涉及的附件详见附件部分。
6.法律名词及注释6.1 并联:由多个机械臂以并联的方式连接在一起,通过共享载荷、合作操作的一种系统。
6.2 关节:机械臂上的可转动连接部件,用于实现机械臂的运动。
6.3 传感器:用于感知机械臂周围环境的装置,能够提供位置、力量、力矩等信息。
并联机器人简介

引言并联机器人具有高刚度、高承载能力、高速度、高精度等特性,在许多领域得到了成功的应用.并联机器人采用的是一种“知识密集”型机构,其性能分析和设计是一项复杂而极富挑战性的问题.由于并联机器人与串联机器人相比具有一些独特的性能,如刚度高、承载能力高、速度高、驱动电机在机架上而使活动构件的质量轻,因此引起了国际上长期的关注,并给予了大量的研究.1938 年,Pollard 提出采用并联机构给汽车喷漆;1949 年,Gough 提出用一种并联机构的机器( 即后来的Stewart平台机构) 检测轮胎;之后,Stewart把这种机构推广应用到飞行模拟器的运动产生装置,并把这种机构命名为Stewart 机构,现在“Stewart Platform”已成为并联机器人领域使用最多的名词之一.并联机器人的拓扑结构中包含了一个或几个闭环,其定义是:有一个或几个闭环组成的关节点坐标相互关联的机器人称为并联机器人.1979年,MacCallion 和Pham建议把一并联装置用于装配线上;1983年,Hunt系统地考查了各种并联机器人的可能运动,提出了并联装置的各种新结构形式;之后,这些并联结构得到了详细地研究,如Yang 和Lee、Mohamed 与Duffy、Fichter、, Merlet 以及Huang 分别研究了空间六自由度并联机器人的运动学、动力学和力控制;Gosselin 和Angeles 讨论了平面、球面三自由度并联机器人的优化设计问题;Lee 和Shah 研究了空间三自由度并联机器人的设计;Inoue 在平行四边形机构的基础上,提出了一种六自由度并联机器人.在并联机器人家族中,Stewart (或称Stewart-Gough) 平台机器人是应用最早而较广的并联机器人之一,从结构上看,它是由上平台(动平台)通过六个相同的运动链与下平台联接形成的,每个运动链含有一个联接下平台的球铰、一个移动副和另一个联接上平台的球铰,这组成了6-SPS结构系统,为了避免自转运动,很多设计者往往用万向铰来代替每个分支中的一个球铰.与传统的串联式机器人相比,并联机器人的特点为:驱动装置可以安放在或接近机架的位置;机器人的运动部分重量轻、速度高、动态性能好、精度较高;运动平台通过几个运动链与机架相联接,因此其结构紧凑、刚性好、承载能力高、能重比高;并联机器人往往采用对称式结构,其各项同性好;动力学特性较好,甚至在尺寸增大时仍保持好的动力学特性;并联机器人的运动学反解简单,正解较麻烦;并联机器人的操纵能力低、工作空间较小.。
并联机器人多目标协同智能控制
多目标协同智能控
02
制理论
协同控制理论
协同控制理论概述
协同控制理论是一种强调多机器人或多机器系统通过相互协 作以实现共同目标的控制理论。它着重于解决复杂任务,如 分担工作负载,增加工作效率,提高灵活性等。
协同控制理论的核心概念
协同控制理论的核心概念包括任务分配、信息共享、协同决 策等。这些概念旨在实现多机器人或多机器系统的最优协调 和最佳性能。
混合智能控制
结合传统控制方法与人工智能 技术,实现控制策略的灵活性 和鲁棒性。
可视化与优化
通过可视化技术和优化算法, 对并联机器人的运动过程进行 优化,提高作业效率和精度。
跨学科合作与创新
控制科学与工程
结合控制理论与方法,研究并联机器人的运动控制策略,提高系统的 稳定性和鲁棒性。
计算机科学与技术
利用计算机科学中的算法和计算技术,实现高效的感知、学习和决策 过程。
实现生产过程的自动化和智能化
并联机器人的出现使得生产过程可以更加高效地进行,提高了生产效率和产品质量。
满足高精度、高强度、高危险性的生产需求
并联机器人的高精度和高强度特性使得在一些高危险性的环境中也能够实现生产过程的自 动化和智能化。
推动工业技术的发展
并联机器人的研究和应用不仅推动了工业技术的发展,也为其他领域的研究和应用提供了 新的思路和方法。
智能控制理论概述
智能控制理论是一种以人工智能为基 础的控制理论,它强调机器学习、模 式识别、神经网络等技术在控制系统 中的应用。
智能控制理论的应用
在并联机器人控制中,智能控制理论 可用于实现自适应控制、预测控制、 模糊控制等先进的控制策略。
多目标协同智能控制的应用
并联机器人的应用
并联机器人发展概述
并联发展概述
并联发展概述
一、引言
技术的快速发展使得并联成为现代工业自动化领域的重要组成部分。
本文将对并联的发展进行细致的介绍和概述。
二、并联的定义和分类
2.1 定义
并联是指由多个自由度和执行器组成的系统,其中每个执行器与固定结构相连,且执行器之间相互平行。
2.2 分类
①基于拓扑结构的分类
②基于运动学的分类
③基于应用领域的分类
三、并联的发展历程
3.1 初期发展阶段
3.2 技术突破和应用拓展阶段
3.3 当前发展状况和未来趋势
四、并联的优势与应用领域
4.1 优势
4.2 应用领域
①制造业
②医疗行业
③航空航天领域
④其他领域
五、并联的关键技术
5.1 运动控制技术
5.2 传感器技术
5.3 控制算法技术
六、并联的未来发展方向
6.1 智能化和自主性
6.2 灵活性和可操作性
6.3 安全性和人机协作
附件:
1.并联实验数据表格
2.并联技术设备清单
法律名词及注释:
1.知识产权:指由人类创造的具有独创性、使用性和有用性的知识及其表达形式所享有的权利。
2.专利:指国家根据法律规定,对新颖的、有创造性的发明或者实用新型给予的专有权。
3.版权:指对于某一作品,由作者或其继承人、顾问等享有的经济权利和非经济权利。
4.商标:指用于标识商品和服务的商业标记,在市场上能够以一定的方法识别商品和服务来源的标志。
并联机器人发展概述
并联机器人发展概述随着先进制造技术的发展,并联机器人已从简单的上下料装置发展成数字化制造中的重要单元。
在查阅了大量国内外相关文献的基础上,介绍了并联机器人的特点、分类、应用,从运动学、动力学、控制策略三方面总结了近年来并联机器人的主要研究成果,并指出面临的问题。
1895年,数学家Cauchy研究一种“用关节连接的八面体”,开始人类历史上并联机器的研究。
1938年Pollard提出采用并联机构来给汽车喷漆。
1949年Caough提出用一种并联机构的机器检测轮胎,这是真正得到运用的并联机构。
而并联结构的提出和应用研究则开始于70年代。
1965年,德国人Stewart发明了六自由度并联机构,并作为飞行模拟器用于训练飞行员。
1978年澳大利亚人Hunttichu把六自由度的Stewart平台机构作为机器人机构,自此,并联机器人技术得到了广泛推广。
自工业机器人问世以来,采用串联机构的机器人占主导位置。
串联机器人具有结构简单、操作空间大,因而获得广泛应用。
由于串联机器人自身的限制,研究人员逐渐把研究方向转向并联机器人。
和串联机器人相比并联结构其末端件上同时由6根杆支撑,与串联的悬臂梁相比刚度大,结构稳定。
由于刚度大,并联结构较串联结构在相同的自重或体积下,有高的多的承载能力大。
串联机构末端件上的误差是各个关节误差的积累和放大,因而误差大、精度低,并联式则没有那样的误差积累和放大关系,微动精度高。
串联机器人的驱动电机及传动系统大都放在运动着的大小臂上,增加了系统的惯量,恶化了动力性能,而并联机器人将电机置于机座上,减小了运动负荷。
在位置求解上,串联机构正解容易,但反解困难。
而并联机构正解困难,反解非常容易,而机器人在线实时计算是要计算反解的。
根据并联机器人的自由度数,可以分为:2自由度并联机构。
2自由度并联机构,如5-R,3-R-2-P(R表示旋转,P表示平移)。
平面5杆机构是最典型的2自由度并联机构,这类机构一般具有2个平移自由度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
_______________________________________________________________________________________ Parallel Kinematics 12P a r a l l e l K i n e m a t i c shis document surveys parallel-kinematics literature and identifies its usefulness. Thedocument has been developed while we were developing our SimParallel machine.On of the aims of this document is to propose an effective solution to the limitations of thetwo rotary axes of five-axis machines that are currently used in industry. However, thesurvey of the parallel-kinematics literature will not be limited to this (two DOFs) family ofparallel kinematics mechanisms lest a seed for an idea for our sought mechanism does existin parallel-kinematics mechanisms with other DOFs. The available parallel mechanismsconcepts will be mentioned and then their kinematics usefulness to our purpose will be morecritically stated in the conclusion section.The document consists of the following 11 sub-sections;•Parallel-Kinematics Mechanisms. •Six DOFs Parallel-Kinematics Mechanisms. •Spatial Translational Three-DOFs Parallel-Kinematics Mechanisms. •Spatial Rotational Three-DOFs Parallel-Kinematics Mechanisms. • Other Three-DOFs Parallel-Kinematics Mechanisms.•Asymmetric Parallel-Kinematics Mechanisms. •Two DOFs Parallel-Kinematics Mechanisms. •Four and Five-DOFs Parallel-Kinematics Mechanisms. •Parallel-Kinematics Mechanisms Redundancy. •Parallel-Kinematics Mechanisms in Industrial Machine-Tools. •Summary and Conclusions1. Parallel-Kinematics MechanismsThe conceptual design of PKMs can be dated back to the middle of the last century whenGough established the basic principles of a mechanism with a closed-loop kinematicsstructure and then built a platform for testing tyre wear and tear [Gough, 1956]. A sketch ofthe mechanism is shown in Figure 1. As shown in the figure, that mechanism allowschanging the position and the orientation of a moving platform with respect to the fixedplatform.T______________________________________________________________________________________ Parallel Kinematics 13Later in 1965 Stewart designed another parallel-kinematics platform for use as an aircraftsimulator [Stewart, 1965]. A sketch of that Stewart mechanism is shown in Figure 2. Forsome reason the mechanisms of Figure 1 and that of Figure 2 as well as many variations (e.g.the one shown in Figure 3 ) are frequently called in the literature Stewart platform. They arealso called Hexapod mechanisms.Figure 2 Stewart Platform Figure 1Gough Platform______________________________________________________________________________________Parallel Kinematics 14Of course other mechanisms related, may be less formally, to PKM existed well before andsoon before Gough’s platform. Bonev [2003] surveyed many of these earlier mechanisms.Gough though is the one who gave some formalization to the concept. It might beinteresting to know that Gough’s platform remained operational till year 1998 and it is nowkept at the British National Museum of Science and Industry. See Figure 4 for photos of theoriginal and current shapes of Gough platform.Many have extensively analyzed Gough/Hexapod platform [Hunt, 1983, Fichter 1986,Griffis and Duffy, 1989; Wohlhart, 1994]. One problem with these six-DOFs platforms isthe difficulty of their forward-kinematics solution, because of the nonlinearity and the highlycoupled nature of their governing equations. This difficulty has been overcome byintroducing some assumptions [Zhang and Song, 1994] and a closed-form solutiuon can befound in [Wen and Liang, 1994]. Others introduced some sensors to measure at least one ofFigure 4Old and Revived Gough Platform Figure 3 Gough-Stewart-Hexapod Platformthe variables of the platform and hence reduce the unknowns of the governing equations[Merlet, 1993; Bonev et al, 1999]. The above mechanisms are six DOFs mechanisms becauseeach of them allows the moving platform to move arbitrarily (within the limit of the work-space) in the six DOF space.Having had a look on the mechanisms above one can now introduce a formal definition ofparallel-kinematics mechanisms; A parallel-kinematics mechanism (or parallel manipulator) isa closed-loop mechanism. That is, a moving plate (ie end-effector) is connected to thestationary base by at least two independent kinematic chains, each of which is actuated. Onthe other hand, A serial-kinematics mechanism (or serial manipulator) is an open-loopmechanism in which each link is connected to ONLY two neighbouring links. All themechanisms discussed in the introduction of Chapter 1 are serial-kinematics mechanisms.The advantages of parallel-kinematics mechanisms in general are;•Excellent load/weight ratios, as a number of kinematic chains are sharing the load.•High stiffness, as the kinematics chains (limbs) are sharing loads and in many cases the links can be designed such that they are exposed to tensile and compressive loadsonly [Hunt, 1978]. This high stiffness insures that the deformations of the links willbe minimal and this feature greatly contributes to the high positioning accuracy ofthe manipulator.•Low inertia, because most of the actuators are attached to the base, and thus no heavy mass need to be moved.•The position of the end-effector is not sensitive to the error on the articular sensors.Higher accuracy due to non-cumulative joint error.•Many different designs of parallel manipulators are possible and the scientific literature on this topic is very rich, as will be shown later in this chapter.•The mechanisms are of low cost since most of the components are standard.•Usually, all actuators can be located on the fixed platform.•Work-space is easily accessible.•The possibility of using these mechanisms as a 6-component force-sensor. Indeed it can be shown that the measurement of the traction-compression stress in the linksenables to calculate the forces and torques acting on the mobile platform. This isespecially useful in haptic devices [Tsumaki et al, 1998].On the other hand, the disadvantages of parallel-kinematics mechanisms in general are;•For many configurations there are some analytical difficulties ( eg the forward kinematics solution is not easy or finding all the mechanism singularities can beextremely difficult task).•The need in many cases for the expensive spherical joints.•Limited useful work-space compared to the mechanism size.•Limited dexterity.•Scaling up PKMs can enlarge the translational DOFs and usually is unable to enlarge the rotational DOFs.•Potential mechanical-design difficulty.•Mechanism assembly has to be done with care.•Time-consuming calibration might be necessary. See [Ryu and Abdul-rauf, 2001] to realize that calibration of PKMs is not a trivial issue.______________________________________________________________________________________ Parallel Kinematics 15______________________________________________________________________________________Parallel Kinematics 16Many other different points of view about the benefits of PKMs and their drawbacks can befound in the literature [Brogårdh, 2002].2. Six-DOFs PKMsThe PKMs mentioned in the previous section are six-DOFs PKMs. Some of thesemechanisms have S-P-S kinematics chains. S-P-S chains are preferred as they, as discussed inAppendix A, transmit no torque through the limbs. These PKMs can also be realized usingS-P-U chains or any other chain that has six-DOFs associated with its joints. One can checkthat against Grübler/Kutzbach criterion above, or review Appendix A. In fact acomprehensive attempt to enumerate the joints combinations and permutations that can beutilized when all the limbs are identical has been reported [Tsai, 1998]. It can also be shownthat the DOFs associated with the limbs joints need to be at least six. See Appendix A too.Figure 5 shows one PKM that has been proposed. It uses six P-R-U-U limbs [Wiegand et al,1996]. Similar to the PKMs above this one also has limited tilting ability. The reachabletilting angle changes strongly with the position of the P joints and fluctuates between 20 and45 degrees. In special poses up to 57 degrees can be reached.It is important to notice that changing the number of limbs in symmetrical six-DOFs PKMswill not change the DOFs of the platform. This has been shown using Grübler/Kutzbachcriterion in Appendix A, and also can be observed in Figure 6 to Figure 9. In these examplesthough we need more than one actuator per limb, and if there are less than six actuatorssome of the DOFs will not be controllable.A Symmetrical PKM is one that has identical kinematics chains (also called limbs or legs)each of which utilize identical actuator.Figure 6 shows another six-DOFs PKM [Tsai and Tahmasebi, 1993]. This PKM has three P-P-S-R limbs. However, planar motors can not provide high load-carrying capacity and theyoccupy the whole base leaving no space to the material to be processed. A similar PKM waslater built and studied [Ben-Horin et al, 1996]. Figure 7 shows a PKM with three P-P-R-Slimbs [Kim and Park, 1998; Ryu et al, 1998]. The range of tilting angles of the platform ofthis mechanism is one of the widest that can found in the literature. However, themechanism uses 8 actuators (for the six P joints and two of the R joints) to realize themotion that can be realized with six actuators only, and many translational motions can beFigure 5 Six-DOFs PKM withsix P-S-U limbs______________________________________________________________________________________ Parallel Kinematics 17realized in direct straight lines. A PKM similar to that shown in Figure 7 has been proposedearlier [Alizade and Tagiyev, 1994]. That earlier PKM had three P-R-P-S limbs instead.Figure 6 Six-DOFs PKM with three P-P-S-R chains Figure 7 Six-DOFs PKM with three P-P-R-S chains Figure 8 Six-DOFs PKM using three Scott mechanisms( b ) ( c )______________________________________________________________________________________Parallel Kinematics 18Probably no mechanism is more famous than the single DOF crank-slider of Figure 8.a. It isa P-R-R-R kinematic chain that coverts linear to rotary motion or vice versa. Scott’smechanism of Figure 8.b [Khurmi and Gupta, 1985] is another traditional planar mechanismthat greatly resembles the well known crank-slider mechanism. Three of these Scottmechanisms have been put together, as shown in Figure 8.c, to realize a three-DOFsmechanism and then each of the Scott mechanism was made to displace vertically, resultingin a six-DOFs mechanism [Zabalza et al l, 2002]. Some of the R joints of the originalmechanism have been replaced by S joints to allow spatial motion of the arms. Theadvantage of the concept is that if one attempts to express the position and the orientationof the platform via its three vertices, then the kinematics relations will be fairly decoupled.The PKMs of Figure 6 and Figure 7 could be considered decoupled. Other six-DOFsdecoupled PKMs have also been proposed [Zlatanov et al. 1992; Wohlhart, 1994].Spherical actuators that can provide three-DOFs actuation are expensive and notcommercially available [Williams and Poling, 2000], but if two of these actuators are used theGough-Stewart platform of Figure 3 can be reduced to the one shown in Figure 9. Pendingthe quality and the mechanical characteristics of these spherical actuators, the solution offersan elegant and promising solution. The work-space, as least the translational part of it, is stilllimited though and load is shared between two rather than six limbs.Six-DOFs PKMs represent the roots of the concept of PKMs and hence they had to belooked at. However, one might say that a six DOFs PKM is PKMs at their extreme, andconsequently one might think that reducing the number of DOFs that act in parallel mightalleviate the disadvantages of parallel-kinematics mechanisms while benefiting from theiradvantages. This is actually true in many cases. In trials to avoid the disadvantages of sixDOFs parallel-kinematics mechanisms while utilizing the other benefits of parallel-kinematics mechanisms, two, three, four and five DOFs PKMs were proposed, as will beshown in the subsequent sections.3. Spatial Translational Three-DOFs PKMsThree-DOFs PKMs for pure rotation or pure translation are of special importance as theyare, in our view, represent a low-level entity or building block of PKMs that helps deepeningthe understanding of these mechanisms. One can subsequently hybridize these two buildingFigure 9 Six-DOFs PKM with two S-P-U Chains______________________________________________________________________________________ Parallel Kinematics 19blocks or sub-systems from them. Spatial translational three-DOFs PKMs are discussed inthis section and spatial rotational three-DOFs PKMs are discussed in the next section.Using Grübler/Kutzbach criterion one can see that using three limbs (legs) each having five-DOFs is one way to realize three-DOFs symmetrical PKMs. See Appendix A for examples.Many of such PKMs have been built and Figure 10 to Figure 13 show examples of thisfamily of translational three-DOFs PKMs. That is, Figure 10 shows a PKM with three limbseach with U-P-U joints [Tsai, 1996]. This mechanism has been studied by others [DiGregorio and Parenti-Castelli, 1998] and been further optimized [Tsai and Joshi, 2000] andits mobility also has been discussed in details [Di Gregorio and Parenti-Castelli, 2002].Obviously the same kind of motion can also be obtained using P-U-U kinematic chains[Tasora et al, 2001], as shown in Figure 11.Figure 10 Translational U-P-U PKM Figure 11 Translational P-U-U PKM______________________________________________________________________________________Parallel Kinematics 20One should notice that the U-P-U mechanism is a special case from the R-R-P-R-Rmechanism, when the axes of each R-R pairs are perpendicular. This R-R-P-R-R has beenstudied and the conditions that need to be satisfied to enable its pure translational motionhas been established [Di Gregorio and Parenti-Castelli,1998]. The P joints can also bereplaced by R joints and the result is shown in Figure 12 [Tsai, 1999]. Alternatively one ofthe R joints could be replaced by P joints resulting in R-P-R-P-R (or R-C-C; C forCylindrical) [Callegari and Marzitti, 2003]. This is shown in Figure 13.In fact all the combinations and permutations the basic R and/or P joints that would resultin PKMs with three five-DOFs limbs have been enumerated [Tsai, 1998; Kong andGosselin, 2001]. Notice that if pure translation is sought using symmetrical PKMs, then Sjoints would not be a favorable choice as one S joint in each limb simply means that rotationcannot be constrained.The Delta mechanism [Clavel, 1988] is one of the earliest and the most famous spatialtranslational three-DOFs parallel-kinematics robots, as it has been marketed and usedindustrially for pick and place applications. A sketch of this mechanism is shown in Figure14. This mechanism can provide pure 3D translational motion to its moving platform usingits three rotary actuators via its three limbs. Each of these limbs actually is a R-R-Pa-RFigure 12 Translational R-U-U PKM Figure 13 Translational R-P-R-P-R (R-C-C) PKM______________________________________________________________________________________ Parallel Kinematics 21 (Revolute-Revolute-Parallelogram-Revolute) kinematic chain. The mechanism can alsoprovide a rotary independent motion about the Z axis as a 4th decoupled DOF.Many variations of that Delta mechanism has been proposed and implemented. One ofthese close variations is the patented Tsai’s manipulator [ Tsai, 1997; Stamper 1997 ], whichalso provides 3D translational motion to its platform. Here, the parallelograms areconstructed using R joints instead of S joints and Stirrups in the previous case. Thatmechanism is shown in Figure 15. Another close variation was also presented [Mitova andVatkitchev, 1991]. The kinematic chains of that variation were R-Pa-R-R instead.A P-R-Pa-R with vertical prismatic joints was also suggested [Zobel et al, 1996]. Variationsextremely similar to that were later implemented using pneumatic drives [Kuhlbusch andNeumann, 2002]. These variations are shown in Figure 16.Figure 14Clavel-Delta translational PKMFigure 15Tsai or Meryland translationalPKM______________________________________________________________________________________When the lines of action of the three prismatic joints are tilted further till all of them are inthe horizontal plane, the star mechanism of Figure 17 is then obtained. This mechanism wasdeveloped by Hervé [Hervé and Sparacino, 1992]. Notice here that the prismatic joints arereplaced by helical ones (ie screw & nut), which should not represent a difference fromkinematics points of view.Figure 16Translational P-R-Pa-R PKMs Figure 17 Herve ’ Star translational PKM Figure 18 The Orthoglide translational PKM ( a ) ( b )( c )______________________________________________________________________________________ Parallel Kinematics 23 The orthoglide mechanism [Wenger and Chablat, 2000 and 2002] is another variation withthe angles between the action lines of the prismatic joints are changed further resulting inbetter motion transformation (from joints to platform) quality. This is shown in Figure 18.Prior to that a similar mechanism has also been designed and built as a coordinate-measuring-machine [Hiraki et al, 1997]. In that mechanism the lines of action of theprismatic joints are changed further to guarantee that the heavy parts if the mechanism areresting on the machine base.Parallelograms represent a common thread among the mechanisms of Figure 14 to Figure 18as a parallelogram would directly constrain the rotational motion about certain axis. SeeAppendix A. Notice also that in all the designs above the two axes of the two revolute jointsof each chain are always parallel, sometimes parallel to the direction of the prismatic joint (ifany) and sometimes perpendicular to it, which agrees with conditions shown later in theliterature [Kong and Gosselin, 2004b].It is important to notice that each limb of each of the PKMs of Figure 14 to Figure 18 hasonly four-DOFs associated with its joints. According to Grübler/Kutzbach criterion thesePKMs are not mobile [Stamper, 1997]. In fact some mechanisms are mobile only undersome geometric conditions. These are called internally over-constrained mechanisms. SeeAppendix A for more about these over-constrained mechanisms. Screw theory can beutilized in conjunction with the Grübler/Kutzbach criterion [Huang and Li, 2002] to showthe mobility of these over-constrained mechanisms.Further, other (that do not utilize parallelograms) spatial translational PKMs with three limbseach of which having four-DOFs have been proposed. Symmetrical PKMs that have three(P-R-R-R) limbs and are aimed at realizing pure spatial translational motion have been built[Kong and Gosselin, 2002a; Kong and Gosselin, 2002b]. Two of these PKMs are shown inFigure 19. For these over-constrained PKMs to realize pure translation the followinggeometrical conditions need to be satisfied;• The axes of the 3 R joints within the same limb are parallel.• The three directions of the R joints of the limbs should not be in the same plane orparallel to the same plane.• Within the same leg the axis of the P joint is not perpendicular to the direction of the R joints axes.Figure 19 Translational Over-Constrained P-R-R-R PKMThe directions of the P joints don’t have to be parallel, but if they are this will help enlarging the work-space. Also, it has been shown that if the three directions of the R joints are perpendicular to each other linear isotropic transformations will be obtained throughout the work-space (and thus no singularities). Compare that to the isotropic conditions reported for the orthoglide mechanism of Figure 18. Isotropic transformation is discussed further in Chapter 4.The geometrical conditions of the mobility of a similar over-constrained PKMs that has three C-P-R (P-R-P-R) limbs, shown in Figure 20, have also been found [Callegari and Tarantini, 2003]. These conditions are;•The axes of the 2 R joints within the same limb are parallel.•The three directions of the R joints of the three limbs should not be in the same plane or parallel to the same plane.It has been shown that singularity of that mechanism can be kept outside the work-space while maintaining a convex work-space. The isotropic points of that mechanism have also been shown.Figure 20Translational Over-ConstrainedP-R-P-R Symmetrical PKMIn fact the geometrical conditions of the different over-constrained PKMs that utilize four-DOFs limbs have been enumerated [Hervé and Sparacino, 1991; Kong and Gosselin, 2004a].Using three limbs each with P-P-P joints is actually another, may be trivial, over-constrained translational PKMs.Another concept that has been extensively utilized at the industrial level is presented now. If three limbs each with six-DOFs (eg U-P-S kinematic chain) associated with its joints are used, then the platform will have six DOFs (as discussed in Appendix A). However, if less than six actuators are used with these three limbs then some DOFs will not be controllable.After choosing which DOFs are to be controlled, one can compensate for the known but uncontrolled motion of the remaining DOFs using other, may be serial, mechanism. One can also use some limbs to mechanically constraint some of the platform DOFs. In fact this is the basic idea behind Neumann’s patented mechanism [Neumann, 1988] of Figure 21.This seems like creating some DOFs that are needed and then constraining or compensating for them. Still, the idea has been utilized. Various aspects of this PKM has been studied extensively [eg Siciliano, 1999] and a further utilization of the concept will be shown in a subsequent section of this chapter. One might say or think that this concept/mechanism is actually is under-utilization of resources because of a prior conviction to utilize a Gough-like platform/limbs.____________________________________________________________________________________________________________________________________________________________________________ Parallel Kinematics 254. Spatial Rotational Three-DOFs PKMsExactly as in the case of spatial translational three-DOFs PKMs spatial rotational three-DOFs PKMs can be realized using three limbs each with five-DOFs associated with itsjoints. The difference now is how the joints of the PKM would be assembled. A PKM withthree U-P-U limbs, just like the one discuused in conjunction with Figure 10, has beenproposed [Karouia, and Hervé, 2000]. Another PKM with three R-R-S (or R-S-R) limbs, asshown in Figure 22, has also been proposed [Karouia, and Hervé, 2002a]. PKM with threeR-U-U have also been presented as well [Hervé and Karouia, 2002b]. Figure 23 also showshow to use three P-R-P-R-R (or C-P-U) limbs to realize a spherical/rotation three-DOFsPKMs [Callegari et al 2004]. PKMs with three U-R-C and with three R-R-S legs have beenproposed as well [Di Gregorio, 2001; Di Gregorio, 2002]. A PKM that utilizesparallelograms (similar to the delta PKM above) within its three R-Pa-S limbs was yetanother propsoed spehrical PKM [Vischer and Clavel, 2000]. In fact the possible sphericalPKMs that are based on five-DOFs limbs are enumerated [Kong and Gosselin 2004b; Kong and Gosselin 2004c; Karouia, and Hervé, 2002b; Karouia, and Hervé, 2003].Figure 21 Neumann ’s constrained U-P-S PKM Synthesis of three-DOFs translational PKMs based on either Lie/Displacement group theory [Hervé and Sparacino, 1991; Hervè, 1999] or on screw theory [Tsai, 1999; Kong and Gosselin, 2004a] have been discussed. Figure 22 Orientation R-S-E PKM______________________________________________________________________________________Again, as in the translational case, over-constrained PKMs can be used to realizeorientational PKMs. If only R joints are used then three R-R-R legs can be used [Gosselinand Angeles, 1989]. The geometric condition that will mobilize this over-constrained PKM isthat all the axes of the used R joints are to be concurrent at the rotation center of themechanism. See Figure 24. Figure 25 shows one of these R-R-R limbs separately. Notice thatin this case the space freedom ( λ ) is three as no element of the mechanism is translating,which should simplify the application of Grübler/Kutzbach criterion. Notice also that onlytwo R-R-R legs can theoretically be used to realize a three-DOFs rotational PKM. SeeAppendix A. This is not usually favorable though as one actuator will not be placed on thePKM base. For isotropic transformation the axes of the R joints of each limb should beperpendicular to each other [Wiitala and Stanisi ć, 2000].Figure 24 Orientation R-R-R over-constrained PKM Figure 25 Orientation R-R-R limb Figure 23 Orientation C-P-U PKMWhen P joints are used then four-DOFs legs can be used to realize over-constrainedrotational PKMs [Kong and Gosselin, 2004c]. The combinations and permutations ofpossible over-constrained spherical PKMs as well as their necessary geometrical conditionsare enumerated [Kong and Gosselin, 2004b; Kong and Gosselin, 2004c].As happened in the translational case using Neumann’s PKM of Figure 21, three six-DOFslegs can be used to realize a six-DOFs PKM and then mechanically constrain thetranslational DOFs. The limbs used can have kinematic structure of P-U-S or R-U-S or theirvariations, as per Figure 26. In these cases an arm extending from the base is used topivot/constrain the platform. The P-U-S or R-U-S chains can theoretically be replaced by S-P-S chain, which also has six DOFs associated with its joints [Mohammadi et al, 1993], asshown in Figure 27.( a ) ( b)( c)Figure 26Orientation U-P-S or R-U-S PKMFigure 27Orientation S-P-S PKM______________________________________________________________________________________ Parallel Kinematics 27Type synthesis of three-DOFs rotational PKMs based on either Lie/Displacement group theory [Karouia and Hervé, 2003] or on screw theory [Kong and Gosselin, 2004b] have been discussed.5.Other Three-DOFs PKMsSo far spatial three DOFs mechanisms have been discussed. Three DOFs mechanisms can provide planar motion too. That is, they can provide the platform with two translational motions and one rotational motion about the plane normal. If, one relies on P and/or R joints as well as Grübler/Kutzbach criterion, then one can find that there are 7 possible symmetrical mechanisms. These are (RRR, RRP, RPR, PRR, RPP PRP, and PPR). S and U joints here not useful here. Each of the three identical kinematic chains in this case needs to have 3 DOFs [Tsai, 1998]. Figure 28 [Hunt, 1983] and Figure 29 [Tsai, 1998] represent two of these possible seven mechanisms that have actually been implemented.Figure 28Planar R-R-R PKMFigure 29Planar P-R-P PKMFigure 30Planar PKM with three PRR limbsor redundancyThe mechanism of Figure 30 is another planar symmetrical 3 DOF PKM that has been proposed [Marquet et al, 2001]. Three P-R-R limbs are used. In the figure one can actually see a 4th chain. This is actually a redundant one to treat singularity, which will be discussed in Section 7. With this fourth P-R-R limb P-U-S limbs have also been proposed.Planar PKMs cannot provide two spatial rotational DOFs and hence they can not directly serve the purpose of this work, and hence they are surveyed thoroughly. Other PKMs can ______________________________________________________________________________________。