LVP603X串口通讯及定时控制软件操作说明
PSL-603U调试手册(智能站)国网版本V1.0
PSL-603U 智能站调试手册
版本说明
装置软件版本 PSL-603UA-DA-G-RPLDYK V3.00 2014-04-23 04BF PSL-603UA-FA-G-RPLDYK V3.00 2014-04-23 04BF PSL-603UA-G-RPLDY V3.00 2014-04-23 1BE0 注 1:-G 表示国网常规装置,常规采样、常规跳闸 注 2:-DA-G:国网智能化装置,SV 采样,GOOSE 跳闸。 注:3:-DG-G:国网智能化装置,常规采样,GOOSE 跳闸。 注 4:-FA-G:国网智能化前接线装置,SV 采样,GOOSE 跳闸。 注:5:R:零序反时限过流保护。P:三相不一致保护。L:过流过负荷功能。D:电铁、钢厂等冲击性负荷。Y:过电压及远方跳 闸保护。K:3/2 断路器接线(仅适用于智能站。不选时,为双母线接线;选择时,为 3/2 断路器接线)。 注 6:V3.XX:基础软件版本。201X-XX-XX:基础软件生成日期。04BF、1BE0:程序校验码。 备注 PSL-603U:适用(220kV 及以上系统)双母接线及 3/2 接线的智能站保护装置。 RPLDYK:六种选配功能码,可任意组合使用。P、K 两种 选配功能,不得同时选用。 PSL-603U:适用(220kV 及以上系统)双母接线及 3/2 接线的传统站保护装置。 RPLDY:五种选配功能码,可任意组合使用。
工具软件名称 SGVIEW UpdateTool VSCL61850 PS61850 CONNER SACWaveAnalysis
版本 V3.60 V1.28 V4.10 V4.10 V2.60 使用低版本工具!!
备注 表中为新六统一保护配套工具最低匹配版本,工程应用中严禁
LVP603S使用说明

LVP603SLED视频处理器使用说明--------------------------------------------------------------------------------------------------- LED 视频处理器2目录一、安全注意事项 ------------------------------------------------------------------ 3二、硬件联接1、背面板信号端口图 ------------------------------------------------------------- 42、端口说明 ------------------------------------------------------------------------- 42、硬件连接图 ---------------------------------------------------------------------- 5三、前面板按键操作1、前面板按键示意图 ------------------------------------------------------------- 62、按键说明(操作模式)-------------------------------------------------------- 6四、调整设置1、进入调整设置 ------------------------------------------------------------------ 102、语言选择 ------------------------------------------------------------------------ 103、输出图像设置-------------------------------------------------------------------- 114、亮度/ 颜色/ 清晰度 ----------------------------------------------------------- 125、画中画 / 画外画设置---------------------------------------------------------- 136、字幕叠加设置---------------------------------------------------------------------157、输入图像设置------------------------------------------------------------------- 178、音频配置 ----------------------------------------------------------------------- 199、退出调整设置 ----------------------------------------------------------------- 2010、工厂区调整设置-----------------------------------------------------------------20五、技术规格 ------------------------------------------------------------------------ 22六、型号说明 ------------------------------------------------------------------------ 23--------------------------------------------------------------------------------------------------- LED 视频处理器3一、 安全注意事项!危险处理器内有高压,非专业维修人员不得打开后盖,以免发生危险。
串口调试助手使用说明
串口调试助手使用说明为简单明了,有些不言自明的功能不作介绍。
1 串口调试助手1.1 设置串口参数:串口号:1-16波特率:600-256000,>115200 时需要硬件支持。
2 接收区/键盘发送区2.1 接收数据a) 设置串口参数b) 如果要按十六进制形式显示接收数据,将十六进制显示选项选中。
c) 点击打开/关闭串口区中的打开串口按钮。
2.2 显示接收数据的长度因某些限制,显示接收数据的文本不能太长,所以当显示文本长度快达到62K 时会自动将显示文本删减到32K,此时文本可保留32K 的字符或约10K 的十六进制数据显示。
2.3 在键盘上发送英文字符a)在接收区/键盘发送区的输入框中用鼠标点一下。
b)在键盘按下按键立刻发送。
在这里不能发送回车换行,也不能发送汉字,若要发送请在单字符串发送区发送。
3 发送数据可以发送单字符串,多字符串(字符串序列)或直接在键盘上发送英文字符。
有两种发送数据格式,一种是普通的字符串,另外一种是十六进制数据即HEX 格式数据。
发送HEX 格式数据时要在字符串输入区中输入HEX 格式字符串,并且要将相应区内的十六进制发送选项选中。
例:HEX 格式数据字符串12 34 AB CD FF3.1 单字符串发送区3.1.1自动发送,自动发送周期:此项功能可以每隔一段时间反复地自动发送输入框中的数据,点击自动发送按钮后即启动自动发送功能。
自动发送周期最大为65535mS。
3.2 多字符串发送区在多字符串发送区可以发送一个字符串,或者自动地、依次发送所有的字符串。
请把鼠标移到“接收区/键盘发送区”和“多字符串发送区”之间,当鼠标形状发生变化时按下鼠标器的左键不松开,然后移动鼠标,将“多字符串发送区”的宽度调宽一些,让“间隔时间”显露出来。
3.2.1发送一个字符串a) 输入字符串。
b) 如果要发送16 进制数据, 要先在字符串后的HEX 选项框中打上对勾。
c) 点击发送按钮。
iVEX使用说明
iVEX软件使用说明★直接运行“iVEX.exe”可执行文件,注意:可执行文件名字必须为“iVEX.exe”,不能修改名字;★从“设备”菜单中选择需要测试的装置类型(以DMR201P为例),该装置的运行画面自动弹出,同时右边会出现“演示面板”;★模拟装置可与SCADA-NT软件通信,其所有的通信规约与实际装置兼容;从“编辑”菜单中选择“模拟通信选项。
”,系统自动弹出对话框。
若选择“模拟串口通信”,则需要从计算机相关的串口接RS232通信线到运行SCADA-NT软件的计算机才能通信,由于需要连接通信线,比较麻烦。
可以选择“模拟TCP/IP通信”,该功能可在局域网的两台计算机之间或一台计算机上实现通信。
若采用本机通信,则本机参数的IP地址和对方参数的IP地址均设为127.0.0.1,端口号分别设为5101和5100。
这样,“VCEMLU”就具备了与SCADA-NT软件进行通信的功能了。
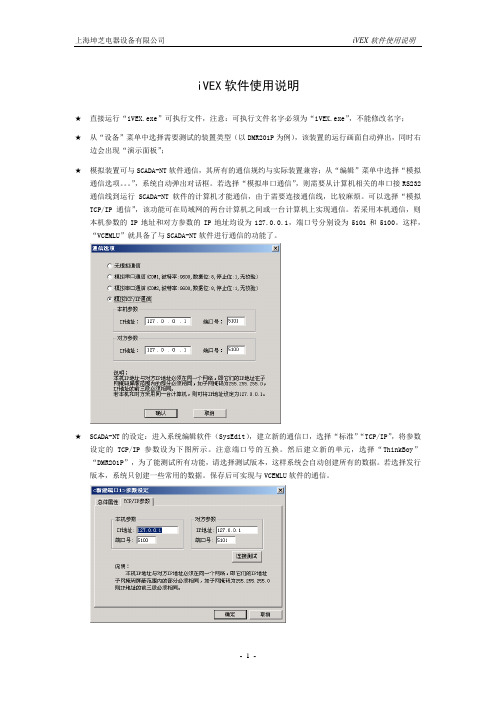
★SCADA-NT的设定:进入系统编辑软件(SysEdit),建立新的通信口,选择“标准”“TCP/IP”,将参数设定的TCP/IP参数设为下图所示。
注意端口号的互换。
然后建立新的单元,选择“ThinkBoy”“DMR201P”,为了能测试所有功能,请选择测试版本,这样系统会自动创建所有的数据。
若选择发行版本,系统只创建一些常用的数据。
保存后可实现与VCEMLU软件的通信。
★演示面板的使用:上部是装置的出口继电器KH1~KH6;左边是交流电流电压输入,可设幅值和相位,输入分“正常状态”和“故障状态”两种,并且可以相互切换,以测试保护,正常状态和故障状态的实际输入幅值和相位可分别通过“正常状态设定”和“故障状态设定”进行设置,以模拟不同的故障类型,其中在“故障状态设定”的对话框中可设定故障过渡时间,由正常状态切换到故障状态时,数据会从正常状态等比例连续变化到故障状态,由故障状态切换到正常状态时,数据立即变化到正常状态;右边是所有开关量输入(其中IN01直接从模拟断路器接入),其它的控制输入量包括控制电源失电、合闸回路断线、跳闸回路断线、CT断线、PT断线,以模拟各种告警状态;演示面板内置一个模拟断路器,其中的“○”“┃”分别表示外部控制断路器的分闸和合闸。
Lvp603 RS232串口控制协议(Ver2.01)
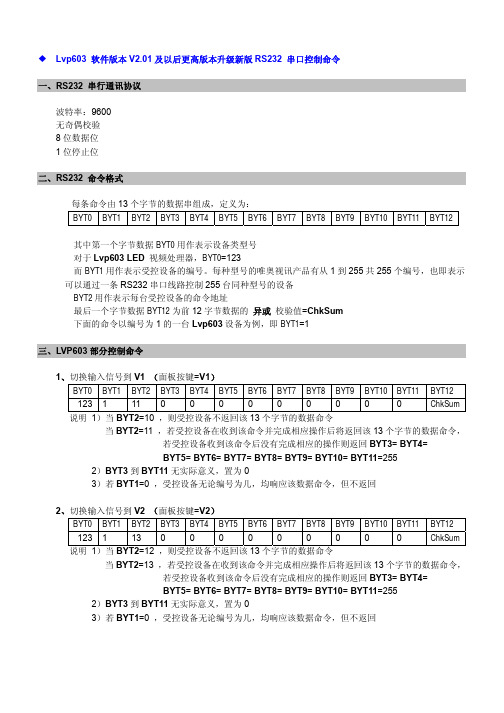
Lvp603 软件版本V2.01及以后更高版本升级新版RS232 串口控制命令一、RS232 串行通讯协议波特率:9600无奇偶校验8位数据位1位停止位二、RS232 命令格式每条命令由13个字节的数据串组成,定义为:BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12其中第一个字节数据BYT0用作表示设备类型号对于Lvp603LED视频处理器,BYT0=123而BYT1用作表示受控设备的编号。
每种型号的唯奥视讯产品有从1到255共255个编号,也即表示可以通过一条RS232串口线路控制255台同种型号的设备BYT2用作表示每台受控设备的命令地址最后一个字节数据BYT12为前12字节数据的异或校验值=ChkSum下面的命令以编号为1的一台Lvp603设备为例,即BYT1=1三、LVP603部分控制命令1、切换输入信号到V1 (面板按键=V1)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 1231 11 0 0 0 0 0 0 0 0 0 ChkSum说明1)当BYT2=10 ,则受控设备不返回该13个字节的数据命令当BYT2=11 ,若受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令,若受控设备收到该命令后没有完成相应的操作则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=2552)BYT3到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回2、切换输入信号到V2 (面板按键=V2)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 13 0 0 0 0 0 0 0 0 0 ChkSum123说明1)当BYT2=12 ,则受控设备不返回该13个字节的数据命令当BYT2=13 ,若受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令,若受控设备收到该命令后没有完成相应的操作则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=2552)BYT3到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回1231 19 0 0 0 0 0 0 0 0 0 ChkSum说明1)当BYT2=18 ,则受控设备不返回该13个字节的数据命令当BYT2=19 ,若受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令,若受控设备收到该命令后没有完成相应的操作则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=255 2)BYT3到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回4、切换输入信号到DP (面板按键=DP)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 15 0 0 0 0 0 0 0 0 0 ChkSum123说明1)当BYT2=14 ,则受控设备不返回该13个字节的数据命令当BYT2=15 ,若受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令,若受控设备收到该命令后没有完成相应的操作则返回 BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=255 2)BYT3到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回5、切换输入信号到DVI (面板按键=DVI)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 21 0 0 0 0 0 0 0 0 0 ChkSum123说明1)当BYT2=20 ,则受控设备不返回该13个字节的数据命令当BYT2=21 ,若受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令,若受控设备收到该命令后没有完成相应的操作则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=255 2)BYT3到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回6、切换输入信号到HDMI (面板按键=HDMI)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 23 0 0 0 0 0 0 0 0 0 ChkSum123说明1)当BYT2=22 ,则受控设备不返回该13个字节的数据命令当BYT2=23 ,若受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令,若受控设备收到该命令后没有完成相应的操作则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=255 2)BYT3到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回1231 25 0 0 0 0 0 0 0 0 0 ChkSum说明1)当BYT2=24 ,则受控设备不返回该13个字节的数据命令当BYT2=25 ,若受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令,若受控设备收到该命令后没有完成相应的操作则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=255 2)BYT3到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回8、设置输出图像亮度(Brightness)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 65 0 0 0 0 0 0 0 0 0 ChkSum123说明1)当BYT2=64 ,则受控设备不返回该13个字节的数据命令当BYT2=65 ,则受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令2)BYT3=亮度值,从0 到32 ,0则全黑,32则最亮3)BYT4到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回9、选择显示模式(Cut/Fade 、PIP、POP、TEXT)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 1231 47 0 0 0 0 0 0 0 0 0 ChkSum说明1)当BYT2=46 ,则受控设备不返回该13个字节的数据命令当BYT2=47 ,若受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令,若受控设备收到该命令后没有完成相应的操作则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=255 2)BYT3表示显示模式,从0 到4 ,显示模式=0 ,表示单画面模式,而切换模式= 无缝切换(Cut )显示模式=1 ,表示单画面模式,而切换模式= 淡入淡出(Fade )显示模式=2 ,表示画中画(PIP)模式显示模式=3 ,表示画外画(POP)模式显示模式=4 ,表示字幕(TEXT)叠加模式3)当选择显示模式=2时,须接着选择输入信号作为PIP信号4)当选择显示模式=4时,须接着选择输入信号作为TEXT信号5)当显示模式=2或=3时,不能选择显示模式=46)当显示模式=2时,且选择好PIP信号后,才可选择显示模式=37)当显示模式=4时,不能选择显示模式=2或=38)BYT4到BYT11无实际意义,置为09)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回10、设置设备编号(Device ID)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT120 35 0 0 0 0 0 0 0 0 0 ChkSum123说明1)必须置BYT1 =02)当BYT2=34 ,则受控设备不返回该13个字节的数据命令当BYT2=35 ,则受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令3)BYT3表示设备编号,从1 到2554)BYT4到BYT11无实际意义,置为05)通过RS232串口软件设置设备编号,必须确保该串口线路只连接一台该型号设备!11、读设备状态0BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 0 0 0 0 0 0 0 0 0 0 ChkSum123说明1)BYT3到BYT11无实际意义,置为02)受控设备收到该命令后将在0.2秒内返回状态数据串,若超过0.2秒仍无返回,则需重发该读状态命令返回状态数据串:BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 123 1 0 Dat3 Dat4 Dat5 Dat6 Dat7 Dat8 Dat9 Dat10 0ChkSum 说明1)Dat3= 显示模式, 其值从0到4显示模式=0 ,表示单画面模式,而切换模式= 无缝切换(Cut )显示模式=1 ,表示单画面模式,而切换模式= 淡入淡出(Fade )显示模式=2 ,表示画中画(PIP)模式显示模式=3 ,表示画外画(POP)模式显示模式=4 ,表示字幕(TEXT)叠加模式2) Dat4= Input_Source_PA , 即A通道信号源数值Input_Source_PA=0 →信号源=V1Input_Source_PA=1 →信号源=V2Input_Source_PA=2 →信号源=DPInput_Source_PA=4 →信号源=VGAInput_Source_PA=5 →信号源=DVIInput_Source_PA=6 →信号源=HDMIInput_Source_PA=7 →信号源=SDI3) Dat5= Input_Source_PB , 即B通道信号源数值Input_Source_PB =0 →信号源=V1Input_Source_PB =1 →信号源=V2Input_Source_PB =2 →信号源=DPInput_Source_PB =4 →信号源=VGAInput_Source_PB =5 →信号源=DVIInput_Source_PB =6 →信号源=HDMIInput_Source_PB =7 →信号源=SDI4) Dat6= PIP_Ready , 表示PIP准备状态PIP_Ready =1 →PIP准备状态,须选择PIP信号PIP_Ready =0 →已选择好PIP信号或非画中画(PIP)模式5) Dat7= TEXT_Ready , 表示TEXT准备状态TEXT _Ready =1 →TEXT准备状态,须选择TEXT信号TEXT _Ready =0 →已选择好TEXT信号或非字幕(TEXT)叠加模式6) Dat8= Com_Busy , 表示设备忙状态,Com_Busy =1 →表示设备空闲,可以接收并处理命令Com_Busy =0 →表示设备忙,不能接收并处理命令7) Dat9= Source_PA_OK , 表示A图像通道信号有无状态Source_PA_OK =1 →表示A图像通道有有效信号输入Source_PA_OK =0 →表示A图像通道无有效信号输入8) Dat10= Source_PB_OK , 表示B图像通道信号有无状态Source_PB_OK =1 →表示B图像通道有有效信号输入Source_PB_OK =0 →表示B图像通道无有效信号输入9)当显示模式=0 或1 时,Input_Source_PA为当前选择的输入信号源但当Input_Source_PA=4时,由Source_PB_OK来表示当前信号有无而当Input_Source_PA不等于4时,则由Source_PA_OK来表示当前信号有无10)显示模式=2 或3 时,Input_Source_PA为背景画面或左边画面的信号,由Source_PA_OK来表示当前信号有无Input_Source_PB为PIP画面或右边画面的信号,由Source_PB_OK来表示当前信号有无11)显示模式=4时,Input_Source_PA为背景画面的信号,由Source_PA_OK来表示当前信号有无Input_Source_PB为TEXT画面的信号,由Source_PB_OK来表示当前信号有无12、读设备状态1BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 1 0 0 0 0 0 0 0 0 0 ChkSum123说明1)BYT3到BYT11无实际意义,置为02)受控设备收到该命令后将在0.2秒内返回状态数据串,若超过0.2秒仍无返回,则需重发该读状态命令返回状态数据串:BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 123 1 1 Dat3 Dat4 Dat5 Dat6 Dat7 Dat8 Dat9 0 0 ChkSum 说明1)Dat3= 设备输出分辨率格式,其值从0到6Dat3=0 →输出分辨率=1024x768_60Dat3=1 →输出分辨率=1024x768_75Dat3=2 →输出分辨率=1280x1024_60Dat3=3 →输出分辨率=1280x1024_75Dat3=4 →输出分辨率=1600x1200_60Dat3=5 →输出分辨率=1920x1080_50Dat3=6 →输出分辨率=1920x1080_602)Dat4= 亮度值,从0 到64 ,0则全黑,64则最亮3)Dat5= Mosaic_Flag(图像拼接标志),其值为0 或1Dat5=0 →输入图像全画幅输入,非拼接状态Dat5=1 →输入图像被截取部分输入,用于多台LVP603并联进行图像拼接当Dat5=1时,须再通过设置Display_Part_Full = 0,方可开启图像拼接4)Dat6= Mosaic_Sync(设置图像拼接时是否需要同步),其值为0 或1Dat6=0 →非同步Dat6=1 →同步(多台LVP603并联进行图像拼接时,通常须设置为同步)5)Dat7= Sync_Flag(当前的同步状态),其值为0 或1Dat7=0 →非同步Dat7=1 →同步6)Dat8= Display_Part_Full(显示状态设置),其值为0 或1当Mosaic_Flag = 0时,Dat8 = 0 →输入输出直通显示Dat8 = 1 →输入图像全画幅压缩显示当Mosaic_Flag = 1时,Dat8 = 0 →截取部分输入进行图像拼接显示Dat8 = 1 →输入图像全画幅显示7)Dat9= 软件版本号(Software_Ver )13、设置输出图像的大小和位置BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 0 0 0 0 0 0 0 0 ChkSum1 130123说明1)当BYT2=130 ,则受控设备不返回该13个字节的数据命令当BYT2=131 ,则受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令2)BYT3 = 03)BYT4 = 输出水平起始(Hori_Start )÷256 的商4)BYT5 = 输出水平起始(Hori_Start )÷256 的余数5)BYT6 = 输出宽度(Hori_Width )÷256 的商6)BYT7 = 输出宽度(Hori_Width )÷256 的余数7)BYT8 =输出垂直起始(Vert_Start )÷256 的商8)BYT9 = 输出垂直起始(Vert_Start )÷256 的余数9)BYT10 = 输出高度(Vert_Height )÷256 的商10)BYT11 = 输出高度(Vert_Start )÷256 的余数11)输出宽度(Hori_Width )≥ 812)输出高度(Vert_Height )≥ 813)输出水平起始(Hori_Start ) + 输出宽度(Hori_Width )≤ H_ACITVE_MAX14)输出垂直起始(Vert_Start ) + 输出高度(Vert_Start )≤ V_ACITVE_MAX15)H_ACITVE_MAX 、V_ACITVE_MAX的取值见《附表1》14、读取输出图像的大小和位置BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT120 0 0 0 0 0 0 0 0 ChkSum1231 128返回值数据串:BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 123 1 1280 Dat4 Dat5 Dat6 Dat7 Dat8Dat9Dat10Dat11ChkSum 说明1)Dat4= 输出水平起始(Hori_Start )÷256 的余数2)Dat5= 输出水平起始(Hori_Start )÷256 的商3)Dat6= 输出宽度(Hori_Width )÷256 的余数4)Dat7= 输出宽度(Hori_Width )÷256 的商5)Dat8= 输出垂直起始(Vert_Start )÷256 的余数6)Dat9= 输出垂直起始(Vert_Start )÷256 的商7)Dat10= 输出高度(Vert_Height )÷256 的余数8)Dat11= 输出高度(Vert_Height )÷256 的商15、设置输入图像的大小和位置BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 0 0 0 0 0 0 0 0 ChkSum1 134123说明1)当BYT2=134 ,则受控设备不返回该13个字节的数据命令当BYT2=135 ,则受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令2)BYT3 = 03)BYT4 = 输入水平起始(Hori_In_Str )÷256 的商4)BYT5 =输入水平起始(Hori_In_Str )÷256 的余数5)BYT6 =输入图像宽度(Input_Width )÷256 的商6)BYT7 = 输入图像宽度(Input_Width )÷256 的余数7)BYT8 = 输入垂直起始(Vert_In_Str )÷256 的商8)BYT9 = 输入垂直起始(Vert_In_Str )÷256 的余数9)BYT10 = 输入图像高度(Input_Height )÷256 的商10)BYT11 = 输入图像高度(Input_Height )÷256 的余数11)输入图像宽度(Input_Width )≥ 12812)输入图像高度(Input_Width )≥ 12813)输入水平起始(Hori_In_Str ) + 输入图像宽度(Input_Width )≤ H_ACITVE_MAX14)输入垂直起始(Vert_In_Str ) + 输入图像高度(Input_Height )≤ V_ACITVE_MAX15)H_ACITVE_MAX 、V_ACITVE_MAX的取值见《附表1》16、读取输入图像的大小和位置BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT120 0 0 0 0 0 0 0 0 ChkSum1231 132返回值数据串:BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 123 1 1320 Dat4 Dat5 Dat6 Dat7 Dat8Dat9Dat10Dat11ChkSum 说明1)Dat4= 输入水平起始(Hori_In_Str )÷256 的余数2)Dat5=输入水平起始(Hori_In_Str )÷256 的商3)Dat6= 输入图像宽度(Input_Width )÷256 的余数4)Dat7= 输入图像宽度(Input_Width )÷256 的商5)Dat8= 输入垂直起始(Vert_In_Str )÷256 的余数6)Dat9= 输入垂直起始(Vert_In_Str )÷256 的商7)Dat10= 输入图像高度(Input_Height )÷256 的余数8)Dat11= 输入图像高度(Input_Height )÷256 的商17、设置PIP图像的大小和位置BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 0 0 0 0 0 0 0 0 ChkSum1231 136说明1)当BYT2=136 ,则受控设备不返回该13个字节的数据命令当BYT2=137 ,则受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令若受控设备收到该命令后没有完成相应的操作则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=255 2)BYT3 = 03)BYT4 = PIP水平起始(PIP_H_Start )÷256 的商4)BYT5 = PIP水平起始(PIP_H_Start )÷256 的余数5)BYT6 = PIP宽度(PIP_H_Width )÷256 的商6)BYT7 = PIP宽度(PIP_H_Width )÷256 的余数7)BYT8 = PIP垂直起始(PIP_V_Start )÷256 的商8)BYT9 = PIP垂直起始(PIP_V_Start )÷256 的余数9)BYT10 = PIP高度(PIP_V_Height )÷256 的商10)BYT11 = PIP高度(PIP_V_Height )÷256 的余数11)PIP宽度(PIP_H_Width )≥ 12812)PIP高度(PIP_V_Height )≥ 12813)PIP水平起始(PIP_H_Start )+ PIP宽度(PIP_H_Width )≤ H_ACITVE_MAX14)PIP垂直起始(PIP_V_Start )+ PIP高度(PIP_V_Height )≤ V_ACITVE_MAX15)H_ACITVE_MAX 、V_ACITVE_MAX的取值见《附表1》18、读取PIP图像的大小和位置BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT120 0 0 0 0 0 0 0 0 ChkSum1 136123返回值数据串:BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 123 1 1360 Dat4 Dat5 Dat6 Dat7 Dat8Dat9Dat10Dat11ChkSum 说明1)Dat4= PIP水平起始(PIP_H_Start )÷256 的余数2)Dat5= PIP水平起始(PIP_H_Start )÷256 的商3)Dat6= PIP宽度(PIP_H_Width )÷256 的余数4)Dat7= PIP宽度(PIP_H_Width )÷256 的商5)Dat8= PIP垂直起始(PIP_V_Start )÷256 的余数6)Dat9= PIP垂直起始(PIP_V_Start )÷256 的商7)Dat10= PIP高度(PIP_V_Height )÷256 的余数8)Dat11= PIP高度(PIP_V_Height )÷256 的商19、设置POP图像的高度(POP_Height )BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 0 0 0 0 0 0 0 0 ChkSum1 146123说明1)当BYT2=146 ,则受控设备不返回该13个字节的数据命令当BYT2=147 ,则受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令若受控设备收到该命令后没有完成相应的操作则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=2552)BYT3 = BYT6 = BYT7 = BYT8 = BYT9 = BYT10 = BYT11 = 03)BYT4 = POP高度(POP_Height )÷256 的商4)BYT5 = POP高度(POP_Height )÷256 的余数5)128 ≤POP高度(POP_Height )≤ V_ACITVE_MAX20、读取POP图像的高度(POP_Height)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT120 0 0 0 0 0 0 0 0 ChkSum1231 144返回值数据串:BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 123 1 1360 Dat4 Dat5 0 0 0 0 00ChkSum 说明1)Dat4= POP高度÷256 的余数2)Dat5= POP高度÷256 的商21、设置TEXT字幕抠像模式和阈值(Text_Mode、Text_Thd_R、Text_Thd_G、Text_Thd_B)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 0 0 0 0 0 0 0 0 ChkSum1 142123说明1)当BYT2=142 ,则受控设备不返回该13个字节的数据命令当BYT2=143 ,则受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令若受控设备收到该命令后没有完成相应的操作则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=2552)BYT6 = BYT7 = BYT8 = BYT9 = BYT10 = BYT11 = 03)BYT3 = 字幕阈值R ( Text_Thd_R )4)BYT4 = 字幕阈值G ( Text_Thd_G )5)BYT5 = 字幕阈值B ( Text_Thd_B )6)BYT6 = 字幕抠像模式( Text_Mode ),其值为0 或1BYT6 = 0 →表示输入的TEXT 图像 < 阈值(Text_Thd_R, Text_Thd_G, Text_Thd_B )的部分将叠加到背景图像上BYT6 = 1 →表示输入的TEXT 图像 > 阈值(Text_Thd_R, Text_Thd_G, Text_Thd_B )的部分将叠加到背景图像上22、读取TEXT字幕抠像模式和阈值(Text_Thd_R、Text_Thd_R、Text_Thd_R、Text_Mode )BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 1400 0 0 0 0 0 0 0 0 ChkSum123返回值数据串:BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 123 1 140Dat4Dat4 Dat5 Dat60 0 0 00ChkSum 说明1)Dat3 = 字幕阈值R ( Text_Thd_R )2)Dat4 = 字幕阈值G ( Text_Thd_G )3)Dat5 = 字幕阈值B ( Text_Thd_B )3)Dat6 = 字幕叠加模式( Text_Mode )23、设置图像同步拼接模式(Mosaic_Sync)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 72 1 0 0 0 0 0 0 0 0 ChkSum123说明1)当BYT2=72 ,则受控设备不返回该13个字节的数据命令当BYT2=73 ,则受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令若受控设备收到该命令后没有完成相应的操作则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=255 2)BYT4 = BYT5 = BYT6 = BYT7 = BYT8 = BYT9 = BYT10 = BYT11 = 03)BYT3 = Mosaic_Sync ,其值为0 或1BYT3 = 0 →表示LVP603在图像拼接时,输出图像与输入图像不同步BYT3 = 1 →表示LVP603在图像拼接时,输出图像与输入图像同步4)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回24、切换图像显示模式(面板按键=Part/Full)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 70 1 0 0 0 0 0 0 0 0 ChkSum123说明1)当BYT2=70 ,则受控设备不返回该13个字节的数据命令当BYT2=71 ,则受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令若受控设备收到该命令后不能完成相应的操作则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=255 2)BYT4 = BYT5 = BYT6 = BYT7 = BYT8 = BYT9 = BYT10 = BYT11 = 03)BYT3 = Display_Part_Full ,其值为0 或1当Mosaic_Flag = 0时,Dat8 = 0 →输入输出直通显示Dat8 = 1 →输入图像全画幅压缩显示当Mosaic_Flag = 1时,Dat8 = 0 →截取部分输入进行图像拼接显示Dat8 = 1 →输入图像全画幅显示4)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回四、附表1输出分辨率H_ACITVE_MAX V_ACITVE_MAX1024x768_601024 7681024x768_75 1024 7681280x1024_60 1280 10241280x1024_75 1280 10241600x1200_60 1600 12001920x1080_50 1920 10801920x1080_60 1920 1080五、软件设计1、软件初始须首先配置COM口;2、接着选择被控设备的设备编号(可通过设备面板Info按键读取);3、测试COM口通讯是否正常(发1条读设备状态命令看是否准确返回);3、接着读取设备基本配置和当前状态;4、可定时读取设备基本配置和当前状态,以此判断设备已执行完成软件发送的操作命令;5、为确保设备正确接收到命令,并执行完相应操作,部分命令有返回设置选项,即BYT2置为奇数值,建议使用该选项。
串口通信软件使用说明

软件使用说明该软件主要实现控制电控平台的位置和从激光测径仪读取数据两个功能。
分5个功能模块,包括数据采集,数据查询,数据参数设置,数据库备份,数据库恢复。
启动软件在计算机桌面,双击dataview2.0图标,进入软件主界面。
数据采集双击主界面的数据采集按钮,进入数据采集操作。
1、串口检查每次软件使用前,要进行串口检查,初始化串口,保证其工作正常。
双击串口检查按钮,在该按钮上面的白色框内显示检查结果。
2、开始测量点击开始测量,软件开始向测径仪读取测量数据;点击停止测量停止向测径仪读取测量数据。
数据查询双击主界面的数据查询按钮,进入数据采集操作。
1、执行查询执行查询前,先设置查询条件。
分两种查询方式,按零件编码查询和按测量日期查询。
2、数据导出如果需要数据打印,或者另存;可以双击数据导出,生成EXCEL文件。
测量设置单击主界面的数据管理菜单按钮,选中测量设置项单击进入测量设置操作。
1、增加新线型双击增加按钮,增加一行新数据;在相应的单元格里填写数据。
填写完毕,双击保存,完成本次增加。
2、线型删除不用的零件,可以删除,选中不用的线型,双击删除按钮。
3、修改数据找到需要修改的单元格,双击该单元格,单元格内光标闪动,输入正确的数据。
确认正确后,双击保存按钮,完成本次操作。
单击主界面的数据库维护菜单按钮,选中数据库备份项单击进入数据库备份操作。
备份文件名和文件路径,自动生成,只要双击开始备份就可以。
单击主界面的数据库维护菜单按钮,选中数据库恢复项单击进入数据库恢复操作。
1、数据恢复选中要要恢复的文件,双击开始恢复。
2、数据库初始化如果数据库,使用时间久了,使用的数据文件太大。
可以先进行数据备份。
然后,在数据恢复时,选中ldinidb.mdb文件进行数据库初始化即可。
PSL-603U说明书-V2.0(国网版)

P S L-603U说明书-V2.0(国网版)-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN国电南自Q/GDNZ.JB011-2006标准备案号:1327-2006 PSL 603U系列线路保护装置说明书国电南京自动化股份有限公司GUODIAN NANJING AUTOMATION CO.,LTDPSL 603U系列线路保护装置说明书编写审核批准V:2.0国电南京自动化股份有限公司2008 年 9 月为保证安全、正确、高效地使用装置,请务必阅读以下重要信息:1.装置的安装调试应由专业人员进行;2.装置上电使用前请仔细阅读说明书。
应遵照国家和电力行业相关规程,并参照说明书对装置进行操作、调整和测试。
如有随机材料,相关部分以资料为准;3.装置上电前,应明确连线与正确示图相一致;4.装置应该可靠接地;5.装置施加的额定操作电压应该与铭牌上标记的一致;6.严禁无防护措施触摸电子器件,严禁带电插拔模件;7.接触装置端子,要防止电触击;8.如要拆装装置,必须保证断开所有地外部端子连接,或者切除所有输入激励量。
否则,触及装置内部的带电部分,将可能造成人身伤害;9.对装置进行测试时,应使用可靠的测试仪;10.装置的运行参数和保护定值同样重要,应准确设定才能保证装置功能的正常运行;11.改变当前保护定值组将不可避免地要改变装置的运行状况,在改变前应谨慎,并按规程作校验;12.装置操作密码为:99。
●本说明书适用于PSL 603U系列保护。
保护的设计标准引用了国网公司Q/GDW 161-2007《线路保护及辅助装置标准化设计规范》。
●本说明书包含技术内容介绍和现场调试大纲。
●本说明书适用于PSL 603U系列线路保护装置V2.00版本保护软件。
产品说明书版本修改记录表* 技术支持:电话(025)51183086传真(025)51183077* 本说明书可能会被修改,请注意核对实际产品与说明书是否相符* 2008年9月第1版第1次印刷* 国电南自技术部监制目录1 概述 (1)1.1 适用范围 (1)1.2 保护配置及型号 (1)1.3 性能特点 (1)2 技术性能及指标 (3)2.1 额定电气参数 (3)2.2 主要技术性能及指标 (3)2.3 绝缘和耐湿热性能 (4)2.4 电磁兼容性能 (5)2.5 机械性能 (5)2.6 环境大气条件 (5)3 保护原理说明 (7)3.1 保护启动和整组复归 (7)3.2 选相元件 (8)3.3 振荡闭锁开放元件 (9)3.4 纵联电流差动保护 (10)3.4.1 电容电流补偿 (10)3.4.2 差动继电器投入条件 (10)3.4.3 常规电流差动继电器 (10)3.4.4 电容电流补偿差动继电器 (12)3.4.5 CT断线及差流越限 (13)3.4.6 CT饱和 (14)3.4.7 双端测距 (14)3.4.8 数据同步 (14)3.4.9 通道说明 (14)3.4.10 通信时钟 (15)3.4.11 通道编号 (16)3.4.12 通道检测 (16)3.4.13 远跳远传 (17)3.4.14 纵联电流差动保护框图 (18)3.5 快速距离保护 (20)3.6 距离保护 (21)3.7 零序保护 (24)3.8 PT断线保护 (25)3.9 非全相和单相运行保护 (26)3.10 合闸于故障线路保护 (26)3.11 保护跳闸逻辑 (26)3.12 重合闸 (27)3.13 正常运行程序 (30)3.14 信息记录分析及与变电站自动化系统配合 (31)4 硬件结构说明 (33)4.1 面板端子和安装结构 (33)4.2 PSL 603U整体结构说明 (36)4.3 PSL 603U各模件说明 (37)4.3.1 交流模件(NO.1-AC) (37)4.3.2 保护功能模件(NO.2-CPUA) (38)4.3.3 人机对话模件(NO.4-MMI) (38)4.3.4 开入模件(N0.5-DIA、NO.6-DIA) (40)4.3.5 信号模件(NO.7-SIGNALA) (41)4.3.6 出口模件(NO.8-TRIPA、NO.9-TRIPA、NO.11-TRIPA、NO.10-TRIPB) (41)4.3.7 电源模件(NO.14-POWER) (43)5 整定值说明 (44)5.1 PSL 603U型保护定值及控制字清单 (44)5.2 定值整定说明 (45)5.3 压板说明 (49)6 装置调试大纲 (51)6.1 维护须知 (51)6.2 保护装置检测 (51)7 附录:装置事件信息一览表 (59)8 订货须知 (63)1 概述1.1 适用范围PSL 603U系列线路保护装置可用作220kV及以上电压等级输电线路的主、后备保护。
威士达操作手册

一、VESDA烟雾报警系统原理简介前言VESDA烟雾报警系统是采用了当代先进的光电技术、网络通信技术和计算机技术制造的高技术产品,内含有多项专利保护的专门制造技术。
该系统独劈蹊径,改变了国内外传统火灾探测器的设计思路,其主要特点有:A 变被动等待为主动抽取空气样品。
传统的火灾探测器都是固定在房间的顶棚上或烟雾易到达之处,等待烟雾将其淹没并渗透到探测器内部时才能引起报警,这个过程花费的时间比较长,如同“守株待兔”。
而VESDA采用了高效抽气泵,通过分布到保护区的采样管网,主动抽取保护区的空气进行分析,并探测其中的烟雾含量,变被动等待为主动出击。
B 采用激光做光源,利用光散射原理探测烟雾,实现了极高的探测灵敏度和很宽的探测范围,两者结合体现出的优异的性能,这在传统火灾探测器中是没有的。
要求火灾探测器既有高灵敏度,又有宽的。
可调的探测范围,一直是消防业界追求的目标,因为消防业的最高的理念就是以防为主,制止火灾的发生。
VESDA系统采用高灵敏的探测器能测出保护区出现的早期微量烟雾,根据烟雾量的增长,发出早期予警、中期予警和火灾临界报警,使人们提早发现火灾苗头,将火灾扑灭于萌芽状态,不会酿成大火。
二、操作手册1.编程器操作说明编程器是VESDA系统中重要部件之一。
分为两种:模块试编程器或便携试编程器。
模块试编程器一般安装在主机或集中显示,编程机架上,位置固定。
便携试编程器使用方面,人们可以拿着它到需要编程的探测器上使用。
1.1编程器的作用:●主要用于对VESDA系统进行编程调试。
●VESDA系统出现故障时用编程器来查找故障原因。
●用于查找事件记录和系统内各部件的状态●利用编程器内在菜单,配合面板上的按键对VESDA进行简单的控制。
1.2 编程器上按键的作用:编程器有两排按键,箭头键用于移动屏上的光标,其他键用于增减数值和确认或退出菜单。
详细说明如下:键:用于向左、向右移动光标,或向左、向右滚动高亮条。
在屏幕提示中选“NO”时,按〈键确认。
LVP40X串口控制协议(Ver1.30)1
LVP40X 主控软件版本MainCon=1.30及以后更高版本已开放部分RS232 串口控制命令一、RS232 串行通讯协议波特率:9600无奇偶校验8位数据位1位停止位二、RS232 命令格式每条命令由13个字节的数据串组成,定义为:BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12其中第一个字节数据BYT0用作表示设备类型号对于LVP40X拼接器,BYT0=122而BYT1用作表示受控设备的编号。
每种型号的唯奥视讯产品有从1到255共255个编号,也即表示可以通过一条RS232串口线路控制255台同种型号的设备BYT2用作表示每台受控设备的命令地址最后一个字节数据BYT12为前12字节数据的异或校验值=ChkSum下面的命令以编号为1的一台LVP40X设备为例,即BYT1=1三、LVP40X部分控制命令1、切换输入信号到V1 (面板按键=V1)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 1221 11 0 0 0 0 0 0 0 0 0 ChkSum说明1)当BYT2=10 ,则受控设备不返回该13个字节的数据命令当BYT2=11 ,若受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令,若受控设备收到该命令后没有完成相应操作的则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=2552)BYT3到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回2、切换输入信号到V2 (面板按键=V2)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 13 0 0 0 0 0 0 0 0 0 ChkSum122说明1)当BYT2=12 ,则受控设备不返回该13个字节的数据命令当BYT2=13 ,若受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令,若受控设备收到该命令后没有完成相应操作的则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=2552)BYT3到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回3、切换输入信号到VGA (面板按键=VGA)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 19 0 0 0 0 0 0 0 0 0 ChkSum122说明1)当BYT2=18 ,则受控设备不返回该13个字节的数据命令当BYT2=19 ,若受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令,若受控设备收到该命令后没有完成相应操作的则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=255 2)BYT3到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回4、切换输入信号到DP (面板按键=DP)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 15 0 0 0 0 0 0 0 0 0 ChkSum122说明1)当BYT2=14 ,则受控设备不返回该13个字节的数据命令当BYT2=15 ,若受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令,若受控设备收到该命令后没有完成相应操作的则返回 BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=255 2)BYT3到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回5、切换输入信号到DVI (面板按键=DVI)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 21 0 0 0 0 0 0 0 0 0 ChkSum122说明1)当BYT2=20 ,则受控设备不返回该13个字节的数据命令当BYT2=21 ,若受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令,若受控设备收到该命令后没有完成相应操作的则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=255 2)BYT3到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回6、切换输入信号到HDMI (面板按键=HDMI)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 23 0 0 0 0 0 0 0 0 0 ChkSum122说明1)当BYT2=22 ,则受控设备不返回该13个字节的数据命令当BYT2=23 ,若受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令,若受控设备收到该命令后没有完成相应操作的则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=255 2)BYT3到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回7、切换输入信号到SDI (面板按键=SDI)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 25 0 0 0 0 0 0 0 0 0 ChkSum122说明1)当BYT2=24 ,则受控设备不返回该13个字节的数据命令当BYT2=25 ,若受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令,若受控设备收到该命令后没有完成相应操作的则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=255 2)BYT3到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回8、设置输出图像亮度(Brightness)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 65 0 0 0 0 0 0 0 0 0 ChkSum122说明1)当BYT2=64 ,则受控设备不返回该13个字节的数据命令当BYT2=65 ,则受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令2)BYT3=亮度值,从0 到32 ,0则全黑,32则最亮3)BYT4到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回9、切换至画面拼接模式0 (面板按键= Mode0)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 37 0 0 0 0 0 0 0 0 0 ChkSum122说明1)当BYT2=36 ,则受控设备不返回该13个字节的数据命令当BYT2=37 ,则受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令2)BYT3到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回10、切换至画面拼接模式1 (面板按键= Mode1)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 1221 39 0 0 0 0 0 0 0 0 0 ChkSum说明1)当BYT2=38 ,则受控设备不返回该13个字节的数据命令当BYT2=39 ,则受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令2)BYT3到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回11、切换至画面拼接模式2 (面板按键= Mode2)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 41 0 0 0 0 0 0 0 0 0 ChkSum122说明1)当BYT2=40 ,则受控设备不返回该13个字节的数据命令当BYT2=41 ,则受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令2)BYT3到BYT11无实际意义,置为03)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回12、选择显示模式(Cut/Fade 、PIP、POP、TEXT)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 47 0 0 0 0 0 0 0 0 0 ChkSum122说明1)当BYT2=46 ,则受控设备不返回该13个字节的数据命令当BYT2=47 ,若受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令,若受控设备收到该命令后没有完成相应操作的则返回BYT3= BYT4=BYT5= BYT6= BYT7= BYT8= BYT9= BYT10= BYT11=2552)BYT3表示显示模式,从0 到4 ,显示模式=0 ,表示单画面模式,而切换模式= 无缝切换(Cut )显示模式=1 ,表示单画面模式,而切换模式= 淡入淡出(Fade )显示模式=2 ,表示画中画(PIP)模式显示模式=3 ,表示画外画(POP)模式显示模式=4 ,表示字幕(TEXT)叠加模式3)当选择显示模式=2时,须接着选择输入信号作为PIP信号4)当选择显示模式=4时,须接着选择输入信号作为TEXT信号5)当显示模式=2或=3时,不能选择显示模式=46)当显示模式=2时,且选择好PIP信号后,才可选择显示模式=37)当显示模式=4时,不能选择显示模式=2或=38)BYT4到BYT11无实际意义,置为09)若BYT1=0 ,受控设备无论编号为几,均响应该数据命令,但不返回13、设置设备编号(Device ID)BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 1220 35 0 0 0 0 0 0 0 0 0 ChkSum说明1)必须置BYT1 =02)当BYT2=34 ,则受控设备不返回该13个字节的数据命令当BYT2=35 ,则受控设备在收到该命令并完成相应操作后将返回该13个字节的数据命令3)BYT3表示设备编号,从0 到2554)BYT4到BYT11无实际意义,置为05)通过RS232串口软件设置设备编号,必须确保该串口线路只连接一台单一的该型号设备!14、读设备状态0BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 1221 0 0 0 0 0 0 0 0 0 0 ChkSum说明1)BYT3到BYT11无实际意义,置为02)受控设备收到该命令后将在0.2秒内返回状态数据串,若超过0.2秒仍无返回,则需重发该读状态命令返回状态数据串:BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 122 1 0 Dat3 Dat4 Dat5 Dat6 Dat7 Dat8 Dat9 Dat10 0ChkSum 说明1)Dat3= 显示模式, 其值从0到4显示模式=0 ,表示单画面模式,而切换模式= 无缝切换(Cut )显示模式=1 ,表示单画面模式,而切换模式= 淡入淡出(Fade )显示模式=2 ,表示画中画(PIP)模式显示模式=3 ,表示画外画(POP)模式显示模式=4 ,表示字幕(TEXT)叠加模式2) Dat4= Input_Source_PA , 即A通道信号源数值Input_Source_PA=0 →信号源=V1Input_Source_PA=1 →信号源=V2Input_Source_PA=2 →信号源=DPInput_Source_PA=4 →信号源=VGAInput_Source_PA=5 →信号源=DVIInput_Source_PA=6 →信号源=HDMIInput_Source_PA=7 →信号源=SDI3) Dat5= Input_Source_PB , 即B通道信号源数值Input_Source_PB =0 →信号源=V1Input_Source_PB =1 →信号源=V2Input_Source_PB =2 →信号源=DPInput_Source_PB =4 →信号源=VGAInput_Source_PB =5 →信号源=DVIInput_Source_PB =6 →信号源=HDMIInput_Source_PB =7 →信号源=SDI4) Dat6= PIP_Ready , 表示PIP准备状态PIP_Ready =1 → PIP准备状态,须选择PIP信号PIP_Ready =0 →已选择好PIP信号或非画中画(PIP)模式5) Dat7= TEXT_Ready , 表示TEXT准备状态TEXT _Ready =1 → TEXT准备状态,须选择TEXT信号TEXT _Ready =0 →已选择好TEXT信号或非字幕(TEXT)叠加模式6) Dat8= Com_Busy , 表示设备忙状态,Com_Busy =1 →表示设备空闲,可以接收并处理命令Com_Busy =0 →表示设备忙,不能接收并处理命令7) Dat9= Source_PA_OK , 表示A图像通道信号有无状态Source_PA_OK =1 →表示A图像通道有有效信号输入Source_PA_OK =0 →表示A图像通道无有效信号输入8) Dat10= Source_PB_OK , 表示B图像通道信号有无状态Source_PB_OK =1 →表示B图像通道有有效信号输入Source_PB_OK =0 →表示B图像通道无有效信号输入9)当显示模式=0 或1 时,Input_Source_PA为当前选择的输入信号源但当Input_Source_PA=4时,由Source_PB_OK来表示当前信号有无而当Input_Source_PA不等于4时,则由Source_PA_OK来表示当前信号有无10)显示模式=2 或3 时,Input_Source_PA为背景画面或左边画面的信号,由Source_PA_OK来表示当前信号有无Input_Source_PB为PIP画面或右边画面的信号,由Source_PB_OK来表示当前信号有无11)显示模式=4时,Input_Source_PA为背景画面的信号,由Source_PA_OK来表示当前信号有无Input_Source_PB为TEXT画面的信号,由Source_PB_OK来表示当前信号有无15、读设备状态1BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 1 0 0 0 0 0 0 0 0 0 ChkSum122说明1)BYT3到BYT11无实际意义,置为02)受控设备收到该命令后将在0.2秒内返回状态数据串,若超过0.2秒仍无返回,则需重发该读状态命令返回状态数据串:BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 122 1 1 Dat3 Dat4 Dat5 Dat6 Dat7 Dat8 Dat9 0 0 ChkSum 说明1)Dat3= 设备输出分辨率格式,其值从0到6Dat3=0 →输出分辨率=1024x768_60HzDat3=1 →输出分辨率=1024x768_75HzDat3=2 →输出分辨率=1280x1024_60HzDat3=3 →输出分辨率=1280x1024_75HzDat3=4 →输出分辨率=1600x1200_60HzDat3=5 →输出分辨率=1920x1080_50HzDat3=6 →输出分辨率=1920x1080_60Hz2)Dat4=亮度值,从0 到16 ,0则全黑,16则最亮3)Dat5=画面拼接模式,其值从0 到2Dat5=0 →画面拼接模式=Mode0Dat5=1 →画面拼接模式=Mode1Dat5=2 →画面拼接模式=Mode24)Dat6= 设备型号值,从1 到4Dat6=1 →设备型号值=1,型号=LVP404Dat6=2 →设备型号值=2,型号=LVP408Dat6=3 →设备型号值=3,型号=LVP412Dat6=4 →设备型号值=4,型号=LVP4165)Dat7=设备输入板卡软件版本号6)Dat8=设备输出板卡软件版本号7)Dat9=设备主控板卡软件版本号1221 112 1 0 0 0 0 0 0 0 0 ChkSum说明1)BYT2 =112或BYT2 =113 ,表示输入水平起点(In_Hori_Start ),或BYT2 =114或BYT2 =115 ,表示输入垂直起点(In_Vert_Start ),或BYT2 =116或BYT2 =117 ,表示输入水平宽度(In_Hori_Width ),或BYT2 =118或BYT2 =119 ,表示输入垂直高度(In_Vert_Height )BYT2为偶数值时,则受控设备不返回共13个字节的数据命令BYT2为寄数值时,则受控设备在收到并处理完成该命令后将返回该13个字节的数据命令2)BYT3 = 图像输出端口号,从1到163)BYT4 = 画面拼接模式,从0到24)BYT5 =0 →设置输入图像的大小或位置5)BYT6 =设置数据÷256 的商,BYT7 = 设置数据÷256 的余数6)输入水平宽度(In_Hori_Width )≥ 1287)输入垂直高度(In_Vert_Height )≥ 1288)输入水平起点(In_Hori_Start )+ 输入水平宽度(In_Hori_Width )≤ H_ACITVE_MAX + 329)输入垂直起点(In_Vert_Start )+ 输入垂直高度(In_Vert_Height )≤ V_ACITVE_MAX + 810)H_ACITVE_MAX 、V_ACITVE_MAX的取值见《附表1》17、读取输入图像的大小或位置BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 112 0 0 1 0 0 0 0 0 0 ChkSum122说明1)BYT2 =112或BYT2 =113 ,表示输入水平起点(In_Hori_Start ),或BYT2 =114或BYT2 =115 ,表示输入垂直起点(In_Vert_Start ),或BYT2 =116或BYT2 =117 ,表示输入水平宽度(In_Hori_Width ),或BYT2 =118或BYT2 =119 ,表示输入垂直高度(In_Vert_Height )2)BYT3 = 图像输出端口号,从1到163)BYT4 = 画面拼接模式,从0到24)BYT5 =1 →读取输入图像的大小或位置返回值数据串:BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 122 1 Dat2Dat3 Dat4 Dat5 Dat6 Dat7 0 0 0 0 ChkSum 说明1)Dat2=112或Dat2=113 ,表示输入水平起点(In_Hori_Start ),或Dat2=114或Dat2=115 ,表示输入垂直起点(In_Vert_Start ),或Dat2=116或Dat2=117 ,表示输入水平宽度(In_Hori_Width ),或Dat2=118或Dat2=119 ,表示输入垂直高度(In_Vert_Height )2)Dat3= 图像输出端口号,从1到163)Dat4= 画面拼接模式,从0到24)Dat5= 15)Dat6= 读取数据÷256 的商6)Dat7= 读取数据÷256 的余数7)Dat8= Dat9= Dat10= Dat11= 01221 112 1 0 0 0 0 0 0 0 0 ChkSum说明1)BYT2 =120或BYT2 =121 ,表示输出水平起点(Out_Hori_Start ),或BYT2 =122或BYT2 =123 ,表示输出垂直起点(Out_Vert_Start ),或BYT2 =124或BYT2 =125 ,表示输出水平宽度(Out_Hori_Width ),或BYT2 =126或BYT2 =127 ,表示输出垂直高度(Out_Vert_Height )BYT2为偶数值时,则受控设备不返回共13个字节的数据命令BYT2为寄数值时,则受控设备在收到并处理完成该命令后将返回该13个字节的数据命令2)BYT3 = 图像输出端口号,从1到163)BYT4 = 画面拼接模式,从0到24)BYT5 =0 →设置输出图像的大小或位置5)BYT6 = 设置数据÷256 的商,BYT7 = 设置数据÷256 的余数6)输出水平宽度(Out_Hori_Width )≥ 1287)输出垂直高度(Out_Vert_Height )≥ 1288)输出水平起点(Out_Hori_Start)+ 输出水平宽度(Out_Hori_Width)≤ H_ACITVE_MAX + 649)输出垂直起点(Out_Vert_Start )+ 输出垂直高度(Out_Vert_Height )≤ V_ACITVE_MAX + 1610)H_ACITVE_MAX 、V_ACITVE_MAX的取值见《附表1》11)PC软件设置或设备面板旋钮调整输出水平起点时,PC界面或设备LCD上的显示值 = 输出水平起点(Out_Hori_Start)- 3212)PC软件设置或设备面板旋钮调整输出垂直起点时,PC界面或设备LCD上的显示值 = 输出垂直起点(Out_Vert_Start )- 819、读取输出图像的大小或位置BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT121 112 0 0 1 0 0 0 0 0 0 ChkSum122说明1)BYT2 =120或BYT2 =121 ,表示输出水平起点(Out_Hori_Start ),或BYT2 =122或BYT2 =123 ,表示输出垂直起点(Out_Vert_Start ),或BYT2 =124或BYT2 =125 ,表示输出水平宽度(Out_Hori_Width ),或BYT2 =126或BYT2 =127 ,表示输出垂直高度(Out_Vert_Height )2)BYT3 = 图像输出端口号,从1到163)BYT4 = 画面拼接模式,从0到24)BYT5 =1 →读取输出图像的大小或位置返回值数据串:BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 122 1 Dat2Dat3 Dat4 Dat5 Dat6 Dat7 0 0 0 0 ChkSum 说明1)Dat2=120或Dat2=121 ,表示输出水平起点(Out_Hori_Start ),或Dat2=122或Dat2=123 ,表示输出垂直起点(Out_Vert_Start ),或Dat2=124或Dat2=125 ,表示输出水平宽度(Out_Hori_Width ),或Dat2=126或Dat2=127 ,表示输出垂直高度(Out_Vert_Height )2)Dat3= 图像输出端口号,从1到163)Dat4= 画面拼接模式,从0到24)Dat5= 15)Dat6= 读取数据÷256 的商6)Dat7= 读取数据÷256 的余数7)Dat8= Dat9= Dat10= Dat11= 020、读取输入图像的大小和位置BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT120 0 0 0 0 0 0 0 0 ChkSum1 159122说明1)BYT2 指定输出图像端口,其值从159到 174而对应的图像端口号= BYT2-222 ,其值从1到 162)BYT3 = 画面拼接模式,从0到2返回值数据串:BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 122 1 Dat2Dat3 Dat4 Dat5 Dat6 Dat7 Dat8Dat9Dat10Dat11ChkSum 说明1)Dat2指定输出图像端口,其值从159到 174而对应的图像端口号=Dat2 -158 ,其值从1到 162)Dat3=画面拼接模式,从0到23)Dat4=输入水平起点(In_Hori_Start )÷256 的余数4)Dat5=输入水平起点(In_Hori_Start )÷256 的商5)Dat6=输入垂直起点(In_Vert_Start )÷256 的余数6)Dat7=输入垂直起点(In_Vert_Start )÷256 的商7)Dat8=输入水平宽度(In_Hori_Width )÷256 的余数8)Dat9=输入水平宽度(In_Hori_Width )÷256 的商9)Dat10=输入垂直高度(In_Vert_Height )÷256 的余数10)Dat11=输入垂直高度(In_Vert_Height )÷256 的商21、读取输出图像的大小和位置BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT120 0 0 0 0 0 0 0 0 ChkSum1221 223说明1)BYT2 指定输出图像端口,其值从223到 238而对应的图像端口号= BYT2-222 ,其值从1到 162)BYT3 = 画面拼接模式,从0到2返回值数据串:BYT0 BYT1 BYT2 BYT3 BYT4 BYT5 BYT6 BYT7 BYT8 BYT9 BYT10 BYT11 BYT12 122 1 Dat2Dat3 Dat4 Dat5 Dat6 Dat7 Dat8Dat9Dat10Dat11ChkSum 说明1)Dat2指定输出图像端口,其值从223到 238而对应的图像端口号= BYT2-222 ,其值从1到 162)Dat3=画面拼接模式,从0到23)Dat4=输出水平起点(Out_Hori_Start )÷256 的余数4)Dat5=输出水平起点(Out_Hori_Start )÷256 的商5)Dat6=输出垂直起点(Out_Vert_Start )÷256 的余数6)Dat7=输出垂直起点(Out_Vert_Start )÷256 的商7)Dat8=输出水平宽度(Out_Hori_Width )÷256 的余数8)Dat9=输出水平宽度(Out_Hori_Width )÷256 的商9)Dat10=输出垂直高度(Out_Vert_Height )÷256 的余数10)Dat11=输出垂直高度(Out_Vert_Height )÷256 的商四、附表1输出分辨率H_ACITVE_MAX V_ACITVE_MAX1024x768_601024 7681280x1024_60 1280 10241600x1200_60 1600 12001920x1080_60 1920 1080五、软件设计1、软件初始须首先配置COM口;2、接着选择被控设备的设备编号(可通过设备面板SYS按键读取);3、测试COM口通讯是否正常(发1条读设备状态命令看是否准确返回);3、接着读取设备基本配置和当前状态;4、可定时读取设备基本配置和当前状态,以此判断设备已执行完成软件发送的操作命令;5、为确保设备正确接收到命令,并执行完相应操作,部分命令有返回设置选项,即BYT2置为奇数值,建议使用该选项。
LVP603通讯控制协议(Ver1.93)

LVP603 / LVP603S 开放部分RS232 串口控制命令,用户可应用此协议设计适合自己的操作控制软件,集成LVP603到您的工程应用中去。
一、RS232 串行通讯协议波特率:4800无奇偶校验8位数据位1位停止位二、RS232 命令格式每条命令由10个字符串组成,均以"zz"开头,以"y" 结尾。
比如:"zzmaxxxxxy" 表示切换输入信号到V1。
三、LVP603 / LVP603S部分控制命令1)输入信号选择命令读/写定义"zzmaxxxxxy" 写切换输入信号到V1"zzmbxxxxxy" 写切换输入信号到V2"zzmcxxxxxy" 写切换输入信号到DP"zzmexxxxxy" 写切换输入信号到VGA"zzmfxxxxxy" 写切换输入信号到DVI"zzmgxxxxxy" 写切换输入信号到HDMI"zzmhxxxxxy" 写切换输入信号到HDSDI2)输出图像亮度设置命令=“zzmj” + ‘Brightness’ + “xxxxy”Brgihtness为亮度值,范围从’a’ 到’q’共16级对应输出亮度=0,此时图像全黑Brghtness=’a’对应输出亮度=64,此时图像最亮Brghtness=’q’比如:命令=“zzmjaxxxxy” –〉输出亮度=0命令=“zzmjbxxxxy” –〉输出亮度=4命令=“zzmjcxxxxy” –〉输出亮度=8…命令=“zzmjqxxxxy” –〉输出亮度=64四、注意LVP603 / LVP603S接收串口控制命令后,通常需要3到5 秒的时间作相应的处理,所以每两条串口控制命令之间至少要有5秒的间隔时间。
串口调试助手使用说明和技术总结大全

串口调试助手使用说明和技术总结大全第一篇:串口调试助手使用说明和技术总结大全串口调试助手的技术报告1.软件简介串口调试助手是在Windows平台下开发的,工具是VC++6.0。
串口调试助手版支持常用的300 ~ 115200bps波特率,能设置校验、数据位和停止位,能以ASCII码或十六进制接收或发送数据或字符(包括中文),能发送文本文件,可以任意设定自动发送周期,并能将接收数据保存成文本文件。
是工程师调试串口的好助手工具。
2.软件特点(1)支持XP /Vista/Win7系统;(2)绿色软件,不需安装。
运行解压软件,将压缩包解压到指定目录即可。
卸载时只需将程序目录删除;(3)支持常用的300 ~ 115200bps波特率;(4)端口范围是COM1-COM4;(5)能设置校验、数据位和停止位;(6)能以字符或十六进制收发数据,支持中文字符的收发;(7)支持文件数据的发送;(8)数据发送端允许设置发送周期,自动发送数据;(9)支持键盘输入,将键盘数据发送到串口;(10)支持自动清空(若设置了“自动清空”,则达到50行后,自动清空接收编辑框中显示的数据)接收窗口数据;(11)如果没有“自动清空”,数据行达到400后,也自动清空,因为数据过多,影响接收速度,显示是最费CPU时间的操作(12)能够保存接收到的数据,保存地址默认的是C:COMDATA;(13)设置了“停止显示”和“继续显示”按钮,可以方便的照出要使用的信息;(14)图钉按钮功能使程序能浮在最上层。
3.软件界面图1串口调试助手V3.0界面4.软件的设计流程本软件使用的是Windows API 串口编程,其编程基本步骤如下:(1)打开串口;(2)建立串口通信事件;(3)初始化串口;(4)建立数据线程;(5)读写数据;(6)结束时关闭串口。
5.遇到的问题与相应的解决方案(1)串口打开或者关闭有明显的提示(2)界面的大小设置问题,起初只有最小化按钮,按要求加上最大化以及界面要按照一定的规则能进行缩放(3)能发送和接收汉字(4)串口接收显示的数据丢失原因:接收显示是影响程序性能的一个大问题,当接收到大量数据时,串口通信助手响应不太及时,这个可能与调用类中的使用机制有关,但显示也没能很好地处理,不过在实际的传输过程中是没有丢失数据的。
虚拟串口管理软件使用说明
(图8)
B.修改
修改功能和新建差不多,只是不可以修改串口号,其他都可以修改。
C.删除
删除一个虚拟串口,一般已打开的串不能删除。
(有一种特殊情况可以删除,当程序异常时,应用程序串口已经关闭,但虚拟串口还提示串口已打开不能删除时,此时可以按住Shift键,再点删除,可以删除此串口。)
D.查看
查看虚拟串口配置,当串口打开时,不能修改,只能查看。
各地销售与服务网点
●深圳市三旺通信技术有限公司
地址:深圳市南山区西丽九祥岭工业区2栋3楼
电话:+86(0755)26702688 26700713 266280877
传真:0755-26703485
E-mail:sale@
●南京营销中心●广州营销中心
(图9)
●西安营销中心●上海营销中心
地址:西安市雁塔西路158号双鱼花园A座1201G地址:上海市徐汇区漕溪路250号银海大厦A608
电话:029-85267870电话:021-6090 4901
E-mail:baiguangyong@
●长沙营销中心●武汉营销中心
地址:长沙市开福区湘雅路上麻园岭301号一单元403室地址:武汉市武昌区中南路2号中建广场C座19H室
电话:0731-82942485电话:027-87739137
传真:0731-82942485传真:027-87739149
E-mail:xuyiming@E-mail:shixiangdong@
1、使用准备
安装产品配套的虚拟串口管理软件到一台PC上,再将设备NPM301(这里以NPM301为例)接入网内。根据您的使用需求相应的设置好您的设备。
地址:南京市汉中门外3号汉中翠庭1单元502室地址:广州市天河区中山大道西荷光路269号现代公寓635室
德力西串口调试定值

德力西串口调试定值
(最新版)
目录
1.德力西串口调试定值的概念
2.德力西串口调试定值的方法
3.德力西串口调试定值的应用
4.德力西串口调试定值的注意事项
正文
一、德力西串口调试定值的概念
德力西串口调试定值是指在德力西变频器中,通过串口通信对变频器进行参数设置和调试的过程中,需要设置的一些固定值。
这些固定值可以确保变频器在特定工况下能够正常运行,提高系统的稳定性和可靠性。
二、德力西串口调试定值的方法
1.通过德力西变频器的键盘面板输入参数值。
2.使用德力西串口调试工具,通过串口通信设置参数值。
3.使用第三方串口调试软件,如串口调试 (AccessPort) V1.33 鸿伟光电,通过串口通信设置参数值。
三、德力西串口调试定值的应用
1.设置德力西变频器的基本参数,如频率、电压等。
2.调试德力西变频器在与其他设备(如传感器、编码器等)的通信过程中出现的问题。
3.配置德力西变频器的保护功能,如过载、过压等。
四、德力西串口调试定值的注意事项
1.在进行德力西串口调试定值时,一定要确保串口连接正确,避免因连接不良导致的通信失败。
2.设置参数值时,要按照德力西变频器的说明书进行,避免设置错误导致设备运行异常。
3.在使用第三方串口调试软件时,要确保软件的兼容性和安全性,以免对德力西变频器造成损害。
总之,德力西串口调试定值是德力西变频器运行过程中不可或缺的一部分,通过设置合适的参数值,可以提高设备的运行效率和稳定性。
串口工具与机智云APP配合使用指南

串口工具与机智云APP配合使用指南机智云修订记录目录1.准备工作 ....................................................................................................- 4 -1.1.在机智云官网申请企业帐号并创建企业项目................................................ - 4 -1.2.在项目中的产品开发资源中扫描二维码下载我们的测试APP ...................... - 4 -1.3.正确烧录Gagent固件................................................................................... - 4 -1.4.用USB转串口工具将模组连接上电脑 .......................................................... - 4 -1.5.下载机智云串口调试助手 ............................................................................. - 5 -1.6.在机智云官网找到产品的product key .......................................................... - 5 -1.7.打开机智云串口工具,并填写以下信息 ....................................................... - 6 -2.串口工具的一些说明..................................................................................- 6 -3.Airlink模式配置模组连接路由器并控制设备.............................................- 8 -3.1.点击打开串口,wifi模组第一次上电时候出现: ......................................... - 8 -3.2.打开手机“机智云APP” ................................................................................. - 8 -3.3.注册帐号登录或者点击跳过 ......................................................................... - 9 -3.4.点击添加设备 ............................................................................................... - 9 -3.5.输入你手机连接的路由器的ssid名称和密码,点击下一步 ....................... - 11 -3.6.点击指令界面的airlink ............................................................................... - 12 -3.7.出现airlink通信信息 .................................................................................. - 12 -3.8.上述步骤完成后在app上“已完成上述操作”打勾,点击下一步 ................ - 13 -3.9.此时app会发出配置包,并提示正在搜索设备.......................................... - 14 -3.10.此时串口工具中会出现以下两条命令 ..................................................... - 15 -3.11.这时app会返回设备列表界面并显示出该设备 ...................................... - 15 -3.12.点击该设备后进入控制页面.................................................................... - 16 -3.13.点击“开启/关闭红色灯”控件................................................................... - 16 -3.14.此时可以看到串口工具中出现以下命令,表示APP成功控制设备 ........ - 17 -3.15.模拟mcu主动向APP上报数据............................................................... - 18 -1.准备工作1.1.在机智云官网申请企业帐号并创建企业项目申请企业帐号请参考:/hc/kb/article/141373/创建企业项目请参考:/hc/kb/article/143617/1.2.在项目中的产品开发资源中扫描二维码下载我们的测试APP1.3.正确烧录Gagent固件以ESP8266为例,在进行下面步骤的时候需要正确烧录机智云wifi固件此步骤请参考:/hc/kb/section/81520/1.4.用USB转串口工具将模组连接上电脑按照以下原理图设计好硬件原理图,并用USB转串口工具将模组连接上电脑。
VSPM虚拟串口软件使用说明

虚拟串口软件使用:
1,安装VSPM,成功后运行,选择第四种模式
2,
3,
4,
5,进入虚拟串口管理---新增虚拟串口,“串口”表示虚拟的串口,“监听ip地址”表示监听本地ip,“模式下设备尝试连接的ip”表示远程客户端设置的ip。
6,按下“确定”以后,进入监听标识处修改响应超时,tcp,ip超时,修改值如图,或根据网络情况适当增大。
当有连接时,右侧显示“客户端已经建立连接”
7,打开Loggnet,选择端口COM3(软件虚拟的端口)。
9,当有数据来往时,连接成功。
10,
EPIP603 型智能控制器

EPIP603型智能控制器─太阳能光伏电源用用户手册1特点■PWM脉宽调制充电■直充、提升、浮充自动充电模式■根据实际充、放电率智能修正控制参数的准确控制(SOC )■发光二极管系统工作状态指示■温度补偿,采用机内、外高精度数字温度传感器测温■过载、短路保护■精确的电池电量测量显示■实时时钟及显示■LCD中英文菜单显示■用户可设定系统工作参数■RS232计算机通讯接口■历史数据记录和下载2面板说明3操作及显示说明①按键说明:面板上从左到右的4个按键依次说明1)确认键(SET ):确认当前选择或者修改;2)取消键(CANCEL ):取消当前选择或者修改,并返回上级菜单;3)选择键(SELECT):用于选择要修改的内容或选择菜单选项;4)开关键/修改键(POWER/MODIFY):用于手动控制负载输出;发生过载、短路保护时按下可以复位这些故障;在数值修改状态下,用于单方向增修改数值;②菜单操作过程如下:1)上电时,液晶显示图1;接线端子排通讯口机外高精度数字温度传感器1A30V 器输出图12)正常工作后,显示“运行参数”(以下都以12V 系统为例)的前两项,如图2所示。
共有9项运行参数:电池电压、电池电量、充电电流、负载电流、充电电压、充电电量、机内温度、电池温度以及系统时间等,可以通过选择键进行查询,每次按下选择键,显示将按照图2、图3、图4、图5、图6、图2的顺序循环显示。
3)在显示“运行参数”时,按下取消键,将显示图7所示“主菜单”,并选中第一项。
注意当前屏幕只显示前两条菜单选项。
此时通过选择键可以进行菜单选项的选择。
每一次按下选择键,选中的光标将向下移动一项,当选择最后一项时按下选择键将选中第一项。
4)若选择的是第一项“1.运行参数查阅”,系统将显示“运行参数”;见第2)项描述; 若选中的是第二项“2.设定参数查阅”,系统将显示系统可以设定的一些参数,通过选择键用户可以查询图8、图9、图10所示内容;若选择的是第三项“3.设定参数”,系统首先提示输入密码,如图11所示,默认密码是1234;正确“输入密码”(见第5)项描述)进入“设置菜单”后,用户可以设置图12所示的8项设定参数(见第6)项描述),设置完所有的参数后,按取消键返回主菜单,或者等待10秒钟,系统自动退出“设置菜单”,显示“运行参数”。
PSL603(A、C、D)线路保护技术说明书

PSL 603(A、C、D)型数字式线路保护装置技术说明书V3.1国电南京自动化股份有限公司2003 年 3 月*本说明书可能会被修改,请注意最新版本资料*由国电南自技术部监制本技术说明书适用于以下版本的保护程序:PSL 603 差动保护版本: 3.16PSL 600 距离零序保护版本:3.16PSL 600 综合重合闸版本: 3.16装置修改说明:1.差动保护定值单改动较大,取消了制动系数的整定等。
2.增加电容电流补偿功能、双端故障测距功能、远跳功能、两路远传功能、通道告警节点、CT断线告警节点、远传永跳功能。
3.显示增加差动电流、制动电流和误码率。
4.距离和零序保护增加一个控制字(KG3),其中1)增加快速距离投退控制位,2)零序Ⅳ 段在非全相运行时是否加速控制位(零序Ⅳ段时间定值减去0.5s ),3)零序Ⅳ段在是否增加一个辅助段,其电流定值和Ⅳ段相同,无方向,延时比Ⅳ段时间长1s。
5.“CT反序”修改为只在装置上电2 小时之内检查。
6.电流定值的最小值由0.1A 改为0.05A。
7.“非全相永跳投入或退出”控制字,改为“非全相再故障永跳或三跳” 。
8.零序保护零序Ⅰ段和Ⅱ段的处理:控制字选择为不灵敏段只在非全相运行及合闸100ms内投入,选择为灵敏段则只在全相运行时投入,合闸时延时100ms 后才启动灵敏段的判断。
9.零序保护增加3U0突变量开放零序保护控制字,突变量取60ms前的,保证3I0 启动而不是突变量启动时也能判出3U0突变。
10.增加输出沟通三跳接点:当重合闸退出、三重方式、充电未满或装置失电时沟通三跳接点闭合,正常运行时打开沟通三跳接点。
11.增加合后继开入量输入,解决先给保护电源再给操作电源时,位置启动重合时可能动作的问题。
现在位置启动重合逻辑如下:当控制字整定为“合后继可用”时,位置启动重合除满足常规条件外,还需合后继动作。
12.AD转换硬件改为AD加DSP模件。
目次1概述 (1)1.1保护配置及型号 (1)1.2性能特征 (1)2技术参数 (3)2.1额定电气参数 (3)2.2主要技术性能 (4)2.3绝缘性能 (4)2.4电磁兼容性能 (5)2.5机械性能 (6)2.6工作大气条件 (6)2.7光纤接口 (6)2.8复接PCM (6)3保护原理说明 (7)3.1保护程序整体结构: (7)3.2启动元件和整组复归 (7)3.3选相元件 (9)3.4振荡闭锁的开放元件 (10)3.5光纤分相电流差动保护 (12)3.6波形比较法快速距离保护 (21)3.7距离保护 (22)3.8零序电流保护 (27)3.9非全相运行 (29)3.10合闸于故障线路保护 (30)3.11重合闸模件 (30)3.12正常运行程序 (36)3.13信息记录和分析 (37)3.14与变电站自动化系统配合 (38)3.15打印及显示信息一览表 (39)4硬件使用说明 (42)4.1PSL603(C)硬件使用说明 (42)4.2PSL603A(D)硬件使用说明 (56)5定值清单及整定说明 (64)5.1PSL603(A、C、D、AS)差动保护定值清单 (64)5.2PSL603、603A 距离保护和零序保护定值清单 (65)5.3PSL603(C)重合闸定值清单 (67)5.4PSL603C、603D 距离保护和零序保护定值清单 (68)5.5PSL603AS 距离保护和零序保护定值清单 (70)5.6保护定值整定说明 (72)5.7压板定值 (79)1概述1.1保护配置及型号PSL 603(A、C、D)型光纤电流差动保护装置以分相电流差动保护和零序电流差动保护作为全线速动主保护,以距离保护和零序方向电流保护作为后备保护。
自带串口输出的模块搭配phyphox使用(VL53L0X)

自带串口输出的模块搭配phyphox使用(VL53L0X)/* 在找其他东西的时候,碰到这篇笔记文档。
看文件时候,2021年8月的。
当时应该正研究phyphox热烈着。
phyphox应该还有巨大的研究空间。
但是各种事情的冲击,回顾起来,已经对phyphox失去兴趣了。
VL53L0X是一款相当不错的位移传感器,虽然反映比较迟钝。
便宜,方便,值得一用。
*/VL53L0XRCWL-0801是国内公司封装的测距传感器,自带单片机,可以直接串口输出,其输入与输出均为十六进制。
直接在USB2TTL上接线。
实际就是两个串口对接,画一下好记。
按照说明书。
用SSCOM以HEX发送F1,返回公司信息和模块版本。
以HEX方式发送C0,返回C0,设为长距离模式;发送A0,返回距离值的HEX进制数。
每当发送一次A0,返回一次测量值。
按照这个原理,把USB2TTL换成BLE蓝牙,由Phyphox用uInt32LittleEndian方式向蓝牙发送1次192(C0的10进制),然后每发送1次160(A0的10进制),VL53L0X就会返回1次测量值。
测量值继续由Phyphox接收,为了转换进制,Phyphox的Input模块接收数据时,要以uInt16BigEndian方式接收,即把16进制转成10进制。
在BlueTooth的Input页设置output,这个output实际是蓝牙传送给手机的数值和数据格式。
在Output标签页设置Config和Input。
Config需要实现输入蓝牙0xC0这一指令,图中即是。
它只执行1次,且在蓝牙开始工作时执行。
这里设置效果,与Input标签页里设置SubscribeOn Start里的Config功能是相同的,都是蓝牙开始工作前的设定。
这里相当发送1次C0。
Analysis里面设定按钮动作,按下之后,把0xA0发送过去。
因为A0的Buffer一直不清除,所以相当无限次发送A0,每发送1次就返回1次测量值。
南京普瑞CDA603-1控制器的说明书

南京普瑞CDA603-1控制器的说明书
1、故障报警
当检测点由于某种原因发生故障时,控制器面板上的黄色发光管点亮,液晶上显示总数及探测点的地址、位置、名称、时间等信息,并伴随有喇叭报警声。
若回路发生故障时,液晶屏的地址位置显示“_路”。
主、从机若通讯有故障时,液静晶屏的地址位置显示“—从机”。
2、预警报警
2.1监测点由于长期使用或者在调试过程中出现重码等原因引起模拟值偏高,系统将其作为预警处理,面板上的预警灯被点亮,液晶显示预警总数及监测点的地址、位置、名称、时间等信息,并伴随有喇叭报警声。
2.2监测点接收到早期异常情况,但未达到报警点,系统须作进一步判断,系统将预警和故障作为同一级别处理,因而在液晶上采用同屏显示。
3、火警、启动
当监测点发生火灾时,面板火警被点亮,且面板上的首火警地址,液晶屏上显示火警总数及监测点的地址、名称、位置、时间等信息,并伴随有喇叭报警声;不管在手动或自动状态下,系统发出启动指令后,面板上联动灯被点亮;如果联动设备有回答信号时,液晶显示联
动设备的地址,名称、位置、时间等信息,并伴随有喇叭报警声。
以上各种报警信息均可采用快捷键进行查询。
4、火警优先
在任何情况下,火警、启动为最高级别,优先于故障、预警。
5、消音键
任何报警引起的喇叭均利用消音键进行消音。
6、电源转换
系统采用了主电与备电两种供电方式,并具有自识别能力,能对主电的过压、欠压或失压以及备电低于额定的电压值时,失压等进行声与光的报警。
操作手册-DTU维护软件使用说明

设计文件名称 操作手册KR5000.0.315.001 产品型号 名称 DTU维护软件使用说明共1 页第 1 页底图总号 签 字 编 制 资料来源1、 连接及通信:(使用交叉网线,自适应可使用直通网线)1) 通过串口或网络连接装置通信板与计算机,选择维护软件的,打开通讯端口,可选择串口通信或以太网客户端模式。
如下图。
a) 点击串口通信时,弹出如下界面:根据使用电脑的串口选择维护软件的串口,使之保持一致。
下图为电脑串口的确定路径。
b) 点击以太网客户端时,弹出如下界面:点击确定,完成连接。
连接之后进行对钟操作,主机时间、装置日期、装置时间与电脑时间均保持一致表示装3、遥测显示:1)装置与计算机连接,且通信正常(可通过采集板查看,也可通过通信板查看相关参数)2)选择DTU装置串口2下装置的(根据需求,装置数量不同)、遥控操作:1)将远方/本地控制拨扭置于远方位置,使用维护软件进行远方操作。
2)装置与计算机连接,且通信正常(可通过采集板查看,也可通过通信板查看相关参数)4)合分闸出口时间:选择DTU采集板装置“本机端口”的“自身采集”、常用参数设置说明注:以下所有参数设置功能均在采集板上设置,不能在通信板上设置、下发。
将网线插到采集板上,同时需要将装置重启或者将电脑网络禁用后再次重启建立连接(凡更换网络口时必进行此操作)逻辑参数均为二次值。
3)将需要的逻辑功能投入,每回路分别选择,单独设置,设置完成后点击保存,参数保存在本地。
4)等待传输进度完成后,单击确定,文件装载结束。
5)每次文件、参数修改、装载完成后,均需要进行“系统复位”待装置运行正常后,重新建立通讯连接,装置就会按照新的参数运行。
签字处数更改文件日期。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
LVP603x 串口通讯 及定时控制软件操作说明 V1.93LVP603x 定时控制 LVP603x 随机附带有定时控制软件: 以: z z z z 。
通过该软件,我们可可手动操作控制,也可编排定时控制计划来实施自动定时操作控制 定时控制计划可定时切换选择输入信号源、调整输出图象亮度或切换 画面显示模式 定时控制软件可在本地 PC 上运行,通过互连网在远端下发定时控制 计划 定时控制软件也可运行在远端 PC,通过 TCP/IP 网直接发送控制命令一、适用机型本说明中的 LVP603x 代表以下机型: z z z LVP603 LVP603S LVP603D二、控制方式LVP603x 可接收上位机软件的操控命令来切换输入信号源或改变输出 图像亮度等。
LVP603x 上位机软件提供 3 种通讯控制方式: z 本地 PC 机 RS232 串行通讯控制 z 远端 PC 机 TCP/IP 局域网(LAN)控制(本地网远程) z 远端 PC 机 TCP/IP 广域网(WAN)控制(互联网远程)三、RS232 控制该 方 式 下 , 用 户 可 通 过 厂 家 提 供 的 RS232 串 口 软 件 来 手 动 操 控 LVP603x ,也可创建定时控制计划,由该串口软件调用计划自动操控 LVP603x 。
RS232 串口软件对 LVP603x 的主要操作和控制有: z 切换输入信号源 z 改变输出图像亮度 z 切换画面显示模式 该方式下, 首先连接 PC 机通讯串口 (COM 口) 至 LVP603x 的 RS232 端口,接着运行控制程序:--------------------------------------------------------------------------------------------------- 2 LED 视频处理器LVP603x 定时控制 1、 用户界面 程序运行后,出现主用户界面,如下图 1:A CB图1 该界面主要有三部分,分别为:A 、B 和C 。
A 定时控制计划显示和修改对话框 B 设备操作控制界面 C 显示当前时间--------------------------------------------------------------------------------------------------- 3 LED 视频处理器LVP603x 定时控制 2、 手动操作 通过界面 B 操作控制 LVP603x,选择输入视频源。
如图 2:图2 首先选择连接到该设备的串行通讯口,如上图选择 COM1,然后直接 手动选择输入视频源即可。
--------------------------------------------------------------------------------------------------- 4 LED 视频处理器LVP603x 定时控制 3、 定时控制 制订一个定时控制计划,软件按计划编排时间定时控制 LVP603x,如 选择输入视频源或改变输出图象亮度等。
如图 3 所示计划:图3 如上图所示,计划分两类: 周期循环性计划(Cycle Plan) 一次性计划(Once Plan) 同时,周期循环性计划又分为三种: 按日循环的计划(Day Plan) 按周循环的计划(Week Plan) 按月循环的计划(Month Plan) 用户根据需要选择一种。
日计划的计划项时间指定了时、分、秒,每个日计划最多可以有 240 个计划项; 每周有 7 日,周计划的计划项时间指定了一周中的星期几、时、 分、秒,每个周计划最多可以有 7×240 个计划项; 每月有 31 日,月计划的计划项时间指定了一月中的第几日、时、 分、秒,每个月计划最多可以有 31×240 个计划项; 一次性计划的计划项时间指定了年、月、日、时、分、秒,每个 一次性计划最多可以有 360 个计划项; 周期性计划和一次性计划可以同时起作用, 但周期性计划分为日 计划、周计划、月计划三种,只能从中选择一种起作用。
--------------------------------------------------------------------------------------------------- 5 LED 视频处理器LVP603x 定时控制 4、 编辑计划 每一种计划都可以增加、修改、删除计划项,如图 4 增加日计划项:图45、 选择计划 用户可以同时打开并编辑 6 个计划,可以选择自动执行其中一个打 开的计划,如图 5 选择 sample.plan(day) 计划:图5 6、 开始计划 --------------------------------------------------------------------------------------------------- 6 LED 视频处理器LVP603x 定时控制 选择好要自动执行的计划后, 点击 Start 按钮, 开始自动执行。
同时, 按钮变为 Stop 字样,此时点击,计划停止执行。
如图 6:图6四、TCP/IP 局网(LAN)控制1、 TCP/IP 局域网(LAN)配置 为实现对 LVP603x 的局域网远程控制,LVP603x 须配置 TCP/IP -> RS232 转换模块:C2000 。
C2000 不是 LVP603x 的标准配置,用户订 货时须另外增加。
正确连接 LVP603x 与 C2000 后,运行软件 , 进入如 图 7 所示界面:--------------------------------------------------------------------------------------------------- 7 LED 视频处理器LVP603x 定时控制 图7打开 LedSyncSetup.exe,出现设置界面,如图 8:图8 点击 Search 按钮,此时界面显示找到已连接的 C2000 转换器,点击 Get 按钮获取设备的网络设置,点击 Load default 按钮使用缺省设置, 点击 Set 按钮更改设备的网络设置。
注意: 在 LAN 模式下, 请检查路由器的内网 IP 设置, 必须将 C2000 的 IP 设置在同一网段。
--------------------------------------------------------------------------------------------------- 8 LED 视频处理器LVP603x 定时控制完成 C2000 的设置后,回到 软件设备对话框界面,如 下面图 9 所示。
在“Connect”栏选择 TCP/IP,在地址栏输入 C2000 内部 IP 地址,点击 Connect 按钮,连接成功后该按钮变为 DisConnect 。
图9 2、 TCP/IP 局域网(LAN)控制 TCP/IP 连接成功后,通过该种方式对 LVP603x 的操作和控制则与 RS232 控制方式完全相同,具体请参照前面(三、RS232 控制) 。
--------------------------------------------------------------------------------------------------- 9 LED 视频处理器LVP603x 定时控制五、TCP/IP 广域网(WAN)控制1、TCP/IP 广域网(WAN)设置 该设置主要针对在不同网段通过互联网远程控制 LVP603x 。
按照前 面 TCP/IP 局域网(LAN)配置 中的方法正确连接 C2000 与 LVP603x, 然后登陆本地路由器,进行端口映射设置,具体操作如下: 打开 IE 浏览器,在地址栏输入本地路由器地址, 例如:http://192.168.1.1(具体地址请阅读路由器的说明书,本操作 手册以华为 H3C 路由器为例) ,弹出以下界面:图 10--------------------------------------------------------------------------------------------------- 10 LED 视频处理器--------------------------------------------------------------------------------------------------- LED 视频处理器11参考路由器的说明书,输入正确的用户名和密码,进入路由器的设置界面,如图11:图11点击高级设置——系统服务,选择“虚拟服务器”,点击“新建”按钮,弹出以下界面:图12--------------------------------------------------------------------------------------------------- LED 视频处理器12在服务名称中输入任意名称,比如:WEB,在外部端口中输入C2000转换器的端口号,C2000端口号默认为:20083,内部端口与外部端口保持一致,在内部服务器IP 内输入C2000的IP地址。
图13点击确定按钮,完成设定。
在路由器配置界面,点击状态记录,在WAN 状态栏下,IP 地址就是该网段的公网IP,如下图:图14--------------------------------------------------------------------------------------------------- LED 视频处理器 13在远端控制PC 上,运行,在TCP/IP 地址栏内输入C2000连接的路由器公网IP,点击 Connect 按钮,如下图所示。
连接成功后该按钮变为 DisConnect 字样。
图152、TCP/IP 广域网(WAN)控制TCP/IP 连接成功后,通过该种方式对LVP603x 的操作和控制则与RS232 方式完全相同,具体请参照前面(三、RS232 控制)。