比亚迪新能源汽车CANBUS总线协议开发研究成果
比亚迪CAN-BUS系统原理
技术·品质·责任
精 诚 服 务
4
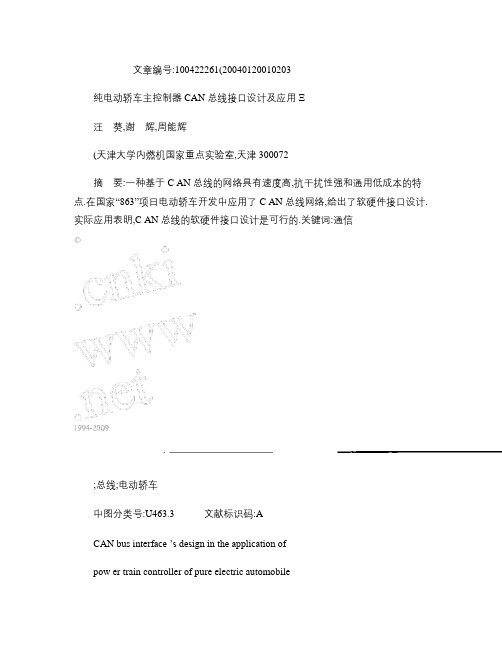
CAN BUS检测
1#CAN短接器 舒 适组合开关
MCU
G2N
T2G
G2N
G2R
G2X G2X 仪表配电盒
B2D
G2T
多路集成控制模块(MICU)
启动网 网关 控制器
IK
轴锁
网关
III#CAN短接器(G35A) 动力网
ABS
ECM
TCU
3.1.1 舒适网络:组合仪表、组合开关、MCU(前舱配电盒)、多媒体、窗控系统
3.1.2 启动网络:MICU(仪表配电盒)、转向轴锁、IK控制器 3.1.3 动力网络:TCU、ABS、EMS
技术·品质·责任
精 诚 服 务
3
CAN BUS工作原理
技术·品质·责任
精 诚 服 务
3
CAN BUS工作原理
技术·品质·责任
精 诚 服 务
总线系统相关诊断 1、各模块通过CAN线进行诊断,诊断口3和11脚为CAN-H和CAN-L。 2、各模块都记录有与CAN通讯相关的故障码,判断CAN通讯是否正常。 3、通过诊断仪读出通讯异常时,先检查CAN线是否有故障,如果CAN正常,再 检查模块。 4、CAN线是否正常,通过在诊断口测量CAN-H和CAN-L的电阻来判断;在OFF档 下测量电阻值在60欧~70欧左右。 ⑤通过测量CAN—H和CAN-L的对地电压; 正常情况下,CAN—H的对地电压在2.5V-3.5V之间; 正常情况下,CAN—L的对地电压在1.5V-2.5V之间;
技术·品质·责任
精 诚 服 务
硬线保护电路——近光灯
组合 开关
CAN-H
CAN-L
多路 集成 控制 模块
比亚迪新能源汽车CANBUS总线协议开发研究成果

比亚迪新能源汽车CANBUS总线协议开发研究成果VIN总里程SOC1、太原5000辆2、深圳不详出租车管理比亚迪E6一共销售大约1.5万辆均为车队车队管理比亚迪2015年销售44.04万辆,2016年销售月14万辆,新车型均采用CANBUS_11bit_500K 总线协议,CAN总线数据ID大约48个,速锐得科技针对比亚迪系列车型进行CAN总线研究覆盖大约80%车型瞄准的市场技术开发属于国内首创D o m e s t i c i n i t i a t i v el比亚迪从速锐一代开始,国内再无OBD及CAN设备兼容l自白帽子团队打破格局,市场已经被炸开了锅l团队源于对技术的研究和执着,深度理解比亚迪造车历史及相关技术思路清晰、刻苦钻研、敢于创新、有效利用、超值回馈,我们为数百家客户带来意想不到的价值无论是国内还是国外,速锐得获得销量与口碑增长,具备独家的核心技术。
等待时间的回报G i f t l a t e n c y t i m e单一化钻研领域客户伙伴的支持新能源市场成熟车联网的风潮万物互联趋势多年日积月累01020304破局四类管理M a n a g e m e n t n e e d s可有效补充市场空白领域,借助第四代移动通讯技术,服务于物联网金融、CRM、车载TBOX及后装汽车电子产品,为用户提供更多对汽车的应用金融管理TBOX车载CRM管理后装用户新能源商用车N e w e n e r g y c o m m e r c i a l v e h i c l e s新能源商用车的管理和应用将超过乘用车实现更大的价值,成为产业升级增量最快的增长点和引爆点新能源物流车将是未来最大增量市场新能源物流车新能源大巴车将成为未来出行主要运输工具新能源大巴车新能源工具车在未来集团用户市场不可或缺新能源工具车其他短程新能源轻卡将穿梭于城市于城市之间其他短程轻卡持续要做的事情A l w a y s d o s o010203速锐得将汽油车、新能源电动车CAN总线技术持续积累重视技术积累引导行业往更安全、更简洁、更快速更稳定的方向发展重视行业引导重视和有效满足用户需求并将好的创意和方法归纳总结重视用户需求20132014201520162012年8月速锐上市,OBD不支持,标准OBD无任何效果继续比亚迪S6之后推出比亚迪S7,新的平台并不友好2015年,比亚迪新能源汽车销售约5.8万辆,国内约20%,全球超过10%一季度数据显示比亚迪新能源汽车销量约1.8万辆,国内市场份额约30%比亚迪汽车持续升温S a l e s i n c r e a s e2014年在坪山比亚迪和车企大佬一起喝砂锅粥2013年在坪山比亚迪与14部15部16部团队畅谈车联网初识比亚迪开锁,落锁,闪灯,鸣笛,转向信号,档位信息,360采用是请求式破解,鉴定完毕!市场成熟360破解团队将比亚迪汽车总线破解比亚迪被破解深刻比亚迪ACBD一切皆是缘分o p p o r t u n i t y谢谢观看H e r e a p p l a u s e。
CAN Bus简介

CAN总线在智能网联汽车中的技术挑战
需要解决高实时性、高可靠性、高安全性等方面的技术问题。
THANKS
感谢观看
CAN Bus技术演进
高速CAN总线技术
目前CAN总线已达到1Mbps,未来将进一步提高至4Mbps或更高,以满足日益增长的数 据传输需求。
低压CAN总线技术
低压CAN总线以其灵活性和低成本性在汽车电子领域得到广泛应用,未来将进一步优化 其性能和可靠性。
CAN总线与互联网技术的融合
随着物联网技术的发展,CAN总线将与互联网技术融合,实现远程监控和管理,提高汽 车智能化水平。
CAN Bus被用于工业自动化控制 系统中的数据传输和控制,例如工 厂自动化生产线、机器人控制系统 等。
其他领域
除了汽车和工业自动化领域,CAN Bus还被应用于医疗设备、航空航 天、智能家居等领域中。
02
CAN Bus通信协议
CAN协议概述
01
CAN是控制器局域网(Controller Area Network)的缩写, 它是一种用于汽车和其他工业应用场合的通信协议。
应用
与CAN控制器一起广泛应用于汽 车、工业自动化、楼宇自动化等
领域。
CAN总线电阻
作用
CAN总线电阻用于匹配总 线上的阻抗,以确保数据 传输的稳定性和可靠性。
类型
分为终端电阻和线电阻两 种类型。
应用
在CAN总线系统中,终端 电阻通常用于连接CAN控 制器和CAN收发器,而线 电阻用于连接其他设备。
灵活性
CAN Bus支持多种数据传输速 率,同时可以适应不同的网络 环境,具有较强的灵活性。
成本效益
宝马CANBUS总线协议开发研究成果

宝马X1
宝马X3
宝马X5
宝马X6
速锐得研究规划
大众 GM 福特 本田
日产 奔驰
2016 年覆盖九大汽车品牌, 占整个市场的比重超过75%。
2017年止,另外还会覆盖汽车 品牌马自达、现代、起亚、标 志、雪铁龙、沃尔沃,达到
丰田
奥迪 宝马
90%。
谢谢观赏!
大服务
新系统的用户体验及服务为Super-CRM 提供更多扩展空间
高收益
用户接受度高,日活量高,
高
回保数据对比
旧模式 新模式
261%
34
%
89
%
宝马广阔市场
宝马(中国)后市场 2016 年的价
值约为350亿元车型适配Fra bibliotek宝马1系
宝马2系轿跑
宝马2系旅行
宝马3系
宝马5系
宝马7系
车型适配
新6系
M级全系
2015年11月22日
宝马全球战略
Super-CRM
远程鸣笛
远程控制系统 远程诊断
中控防盗警告
开/关大灯
VIN、仪表里程 反光镜折叠
开/闭天窗
开/关
开关门窗锁
开启尾箱
核心是连接
cloud
数据采集平台
汽车工况数据
驾驶行为数据
位置服务
社交、生活服务
讲究实效 低成 本
EST-T6智能设备及平台开发成本相对较低
纯电动客车整车CAN通讯协议
0 to1500(0 to 15) 0 to16000(-8000 to 8000) 0 to36666(-5500 to 5500)
0 to250(-40 to 210) 0 to200(0 to 1)
0 to250(0 to 100) 0 to1000(0 to 100) 0 to2000(0 to 200) 0 to255(0 to 510) 0 to250(0 to 50)
0 8000 18333 40
0 0 0 0 0 0
2BYTE 2BYTE 2BYTE 1BYTE 1BYTE 1BYTE 2BYTE 2BYTE 1BYTE 1BYTE
3.5 整车系统控制网络 CAN 通讯机制
根据实验测得 CAN 总线在 250K 速率的通讯情况下,每帧报文的占用时间是 500uS。为了保证通讯的可靠性和稳定性,同时 考虑到控制的实时性,网络通讯周期定为 50mS,整车控制器初始化运行后,每隔 50mS 以广播方式发送数据给各部件,在一个周 期里只发送一次(在收到综合控制器数据后的 50mS 内);
实际电压 18~36V 范围内使用; 4)CAN 总线的通信电缆采用屏蔽双绞线(阻燃 0.5mm),屏蔽层应连接到 CAN_GND,屏蔽线的接地方式由整车布线时选择
合适位置单点接地; 5)网络的接线拓扑为一个尽量紧凑的线形结构以避免电缆反射。ECU 接入总线主干网的电缆要尽可能短。为使驻波最小化,
节点不能在网络上等间距接入,接入线也不能等长,且接入线的最大长度应小于 1m; 6)CAN 总线上各部件均有终端电阻(120Ω),同时,终端电阻同网络线之间通过跳线连接,以便灵活搭配,方便调试使用,
8
3.6 各系统 ECU 参数组定义
3.6.1 CANBus1 中各系统 ECU 参数组定义
某纯电动轻型客车CAN总线车载网络系统开发
某纯电动轻型客车CAN总线车载网络系统开发某纯电动轻型客车CAN总线车载网络系统开发汽车行业在智能化和电动化方面的快速发展,使得车载网络系统和电子控制系统的重要性越来越显著。
特别是纯电动车型,车载网络系统和电子控制系统的设计和开发尤为重要。
在此背景下,某纯电动轻型客车CAN总线车载网络系统开发的研究工作就显得尤为紧迫和必要。
本研究基于CAN总线技术,设计了一套适用于某纯电动轻型客车的车载网络系统。
该系统的主要特点是采用多跳CAN总线拓扑结构,实现了多节点之间的高速、可靠、低延迟的通讯。
同时,在硬件上对CAN总线芯片进行了选型和设计,配合适当的外设,实现了包括数据采集、监控、控制等完整的车载网络系统功能。
为了保证系统的稳定性和可靠性,本研究在软件上根据车辆各个功能模块的需求,采用了先进的CAN总线通讯协议,并参考了相关的国际标准和规范。
同时,本研究还针对CAN总线通讯数据的传输、过滤、校验等方面进行了改进和优化,从而保证长时间高速运行下的通讯性能和数据完整性。
本系统实现了多节点之间的实时数据通讯和控制,能够满足车辆的多种功能要求,如充电管理、电池管理、动力控制、驾驶辅助、音频娱乐等。
同时,本系统还具有可扩展性和可定制性,能够适应不同客户的特殊需求。
在实际测试中,本系统已经通过了各种严酷的环境和性能测试,表现出了优秀的性能和可靠性。
本系统的开发成功,为某纯电动轻型客车的推广和普及提供了坚实的技术基础。
总之,本研究基于CAN总线技术,设计了一套适用于某纯电动轻型客车的车载网络系统,实现了多节点的高速、可靠、低延迟通讯和完整的车载网络功能,具有可扩展性和可定制性,为某纯电动轻型客车的发展做出了重要贡献。
除此之外,本系统还考虑了安全性问题。
对于车载网络系统而言,安全往往是一个非常重要的考虑因素。
因此,我们在系统设计的过程中,充分考虑了安全机制的设计。
首先,我们采用了CAN总线上加密的方式,保护了通讯内容的安全性,从而避免了黑客攻击和数据泄露的风险。
混合动力汽车CAN网络通信协议的应用研究
3 .安 全 关 键 工 业 测控 技 术教 育部 工程 研 究 中心 , 肥 合
利 ’ 。
200 ; 3 0 9
20 0 ) 30 9
200 ; 2 309 .合肥 工业大 学机械与汽车工程学院, 合肥
[ 摘要] 针对混合动力汽车动力系统通 信需求 和控 制策略 , 提出 了基 于 C N总线 的控制系统拓扑 结构 , A 开发
p l g fc n r l y tm a e n C u sp o o e a C oo y o o t se b s d o AN b si r p s d, AN o o s c mmu ia in p oo o o e s s m e eo e n c t r t c l rt y t i d v l p d, o f h e s
[ src] I i fh o m nct nrq imet adcnrlt tg f yr lc i vhc , ・ Abtat nve o ecm u i i eur ns n ot r eyo hbi e tc eie at w t ao e o sa d e r l o
Ha in h n ,Li e g u ,Cu h h i,Z a gBe h n n Ja g o g u Zh n y iS iu h n n o g , 。& Z a g Li, h n 。
1Sho o p t n nom t n e i nvrt o eh o g Hfi 30 9 .colfC m ue a dI rai ,Hf i sy ,Tcnl y, e 20 0 ; o r f o e U e i o e 2 Sh o o Mahnr n uo o i n ierg,Hfi nvrt o e n l y Hfi 30 9; .c l o f ci ya dA t blE gne n e m e i e i sy fTc o g , e 2 00 e U e i h o e
日产CANBUS总线协议开发研究成果
N延保
保险管家
颠覆以往 精准打击
日产文化蜕变
保护自然环境,发展人文教育
NISSAN安全驾驶训练营,提升安全驾驶与自救
以绿色环保为宗旨,传承丝路文明,倡导健康的生活理念
NISSAN杯全国青少年交通安全汽车环保知识评选
日产智能战略
TOYOTA
HONDA
NISSAN MAZDA
以速锐得智能硬件 EST629为通路和管道, 以日产在全球领域的 汽车为基础,以日产 服务为保障,覆盖日 产、丰田、本田、马 自达等中高端车型, 打造全球一流的远程 服务提供商,服务全 球日系车主,让汽车 更加安全,驾驶更具 乐趣、服务更加贴心, 用车更具智能。
四门信号 尾箱状态及控制 手刹状态
大灯信号 车锁状态及控制 仪表里程
雾灯信号 喇叭控制
车速
转向灯信号 钥匙状态 位置灯信号 档位信号
转速 水温
日产对人的关注 信息 消费
旅行
导航
社交
维保
日产对车的关注
日产
TSP服
务中心
渠道商 服务商
定期推送
日产对技术关注
01 速锐得拥有持续六年CANBUS总线开发经验 01 02 14 个汽车牌1000多款车型总线开发实战经验
DAS智能疲劳驾驶预警系统
监测到异常于前15分钟驾驶习惯,判定为疲劳驾驶,通过3D平时显示屏,蜂鸣声预警.
CTA倒车车侧预警系统
倒车时,探测左后方和右后方25米范围内来车,通过3D显示屏,蜂鸣声预警.
日产智能战略
谢谢观赏,再见!
日产新工匠精神
LDW车道偏离预警系统
以70km/h以上速度行驶时监测路上车道线,通过3D平视显示,蜂鸣器预警.
纯电动乘用车CAN总线通讯协议v1.0
纯电动乘用车CAN总线通讯协议(V1.0)编制:李冬明日期:2014.11.21.审核:日期:_批准:日期:_广东陆地方舟新能源汽车电驱动系统有限公司2014年11月版本历史一、通讯协议说明1、CAN通讯协议符合J1939;2、波特率:250K;3、CAN数据长度:8 Bytes;二、网络拓扑结构三、纯电动乘用车ECU节点定义四、CAN报文说明4.1 电机控制器报文(1)电机控制器报文1控制器状态:电机控制器故障代码:采用4位数值xxxx形式表示,其中xxxx使用十进制数值表示。
(2)电机控制器报文2(3)电机发送VCU报文电机及控制器状态(1表示有效,0表示无效)4.2、电池管理系统(BMS)通讯报文BMS报文1BMS报文2BMS报文3故障报警1:故障报警2:故障报警3:BMS状态:4.3、VCU通讯报文(1)VCU发送电机控制报文1电机工作模式指令(1表示有效或正常,0表示无效或故障)注:1)对直流电压限制值,驱动工况下为最低工作电压限制值,制动工况下为最高制动电压限制值。
2)对直流电流限制值,驱动工况下为最大输出电流限制值,制动工况下为最大回馈电流限制值。
(2)VCU发送BMS报文2电池工作模式指令(3)整车控制器报文3(3)整车控制器报文4附表:Byte3定义驾驶员操作状态Bit1 脚刹开关0 表示断开;1 表示闭合;Bit2 驻车开关0 表示断开;1 表示闭合;Bit3 手刹开关0 表示断开;1 表示闭合;Bit4~5 座椅安全带00B 表示断开;11B 表示全部闭合;01B表示驾驶员处未闭合;10B 表示乘员处未闭合附表:Byte4定义换挡器状态Bit1 AMT工作模式:0表示自动模式;1表示手自一体模式;Bit2:经济/运动模式开关:0表示经济模式;1表示运动模式;Bit3~4:保留Bit5~8:0000B:空挡;0001B:一档;0010B:二档;(0011B:三档;0100B:四档;0101B:五档… 以此类推)1111B:倒档。
新国标电动汽车充电CAN报文协议解析.
新国标电动汽车充电CAN报文协议解析说明:多字节时,低字节在前,高字节在后。
电流方向:放电为正,充电为负。
一、握手阶段:1、ID:1801F456(PGN=256(充电机发送给BMS请求握手,数据长度8个字节,周期250msBYTE0辨识结果(0x00:BMS不能辨识,0xAA:BMS能辨识BYTE1充电机编号(比例因子:1,偏移量:0,数据范围:0~100BYTE2充电机/充电站所在区域编码,标准ASCII码BYTE3BYTE4BYTE5BYTE6BYTE72、ID:180256F4(PGN=512(BMS发送给充电机回答握手,数据长度41个字节,周期250ms,需要通过多包发送,多包发送过程见后文BYTE0BMS通信协议版本号,本标准规定当前版本为V1.0,表示为: byte2,byte1---0x0001,byte0---0x00BYTE1BYTE2BYTE3电池类型,01H:铅酸电池;02H:镍氢电池;03H:磷酸铁锂电池;04H:锰酸锂电池;05H:钴酸电池;06H:三元材料电池;07H:聚合物锂离子电池;08H:钛酸锂电池;FFH:其它电池BYTE4整车动力蓄电池系统额定容量/A·h,0.1A·h/位,0A·h偏移量,数据范围:0~1000A·hBYTE5BYTE6整车动力学电池系统额定总电压/V,0.1V/位,0V偏移量,数据范围:0~750V BYTE7BYTE8电池生产厂商名称,标准ASCII码BYTE9BYTE10BYTE11BYTE12电池组序号,预留,由厂商自行定义BYTE13BYTE14BYTE15BYTE16电池组生产日期:年(比例:1年/位,偏移量:1985,数据范围:1985~2235 BYTE17电池组生产日期:月(1月/位,偏移量:0月,数据范围:1~12月 BYTE18电池组生产日期:日(1日/位,偏移量:0日,数据范围:1~31日 BYTE19电池组充电次数,1次/位,偏移量:0次,以BMS统计为准BYTE20BYTE21BYTE22电池组产权表示(0:租赁,1:车自有BYTE23预留BYTE24~40车辆识别码(vin二、充电参数配置阶段:1、ID:180656F4(PGN=1536(BMS发送给充电机,动力蓄电池配置参数,数据长度13个字节,周期500ms,需要通过多包发送,多包发送过程见后文BYTE0单体动力蓄电池最高允许充电电压(比例:0.01V/bit,偏移量:0 BYTE1BYTE2最高允许充电电流(比例:0.1A/bit,偏移量:-400ABYTE3BYTE4动力蓄电池标称总能量(0.1Kw·h/bit,偏移量:0BYTE5BYTE6最高允许充电总电压(比例:0.1V/bit,偏移量:0BYTE7BYTE8最高允许温度(比例:1度/bit,偏移量:-50度BYTE9整车动力蓄电池荷电状态SOC(比例:0.1%/bit,偏移量:0BYTE10BYTE11整车动力蓄电池总电压(比例:0.1V/bit,偏移量:0BYTE122、ID:1807F456(PGN=1792(充电机发送给BMS,时间同步信息,数据长度7个字节,周期500ms BYTE0秒(压缩BCD码BYTE1分(压缩BCD码BYTE2时(压缩BCD码BYTE3日(压缩BCD码BYTE4月(压缩BCD码BYTE5年(压缩BCD码BYTE63、ID:1808F456(PGN=2048(充电机发送给BMS,充电机最大输出能力,数据长度6个字节,周期250ms BYTE0最高输出电压(比例:0.1V/bit,偏移量:0BYTE1BYTE2最低输出电压(比例:0.1V/bit,偏移量:0BYTE3BYTE4最大输出电流(0.1A/bit,偏移量:-400BYTE54、ID:100956F4(PGN=2304(BMS发送给充电机,电池充电准备就绪,数据长度1个字节,周期250ms BYTE0BMS是否充电准备好(0:BMS未准备好,0xAA:BMS完成充电准备5、ID:100AF456(PGN=2560(充电机发送给BMS,充电机输出准备就绪,数据长度1个字节,周期250ms BYTE0充电机是否完成充电准备(0:充电机未完成准备,0xAA:完成准备三、充电过程:1、ID:181056F4(PGN=4096(BMS发送给充电机,电池充电需求,数据长度5个字节,周期50msBYTE0充电电压需求(0.1V/bit,偏移量:0VBYTE1BYTE2充电电流需求(0.1A/bit,偏移量:-400ABYTE3BYTE4充电模式(0x01:恒压充电;0x02:恒流充电2、ID:181156F4(PGN=4352(BMS发送给充电机,电池充电总状态,数据长度9个字节,周期250ms,需要通过多包发送,多包发送过程见后文BYTE0充电电压测量值(0.1V/bit,偏移量:0VBYTE1BYTE2充电电流测量值(0.1A/bit,偏移量:-400ABYTE3BYTE4最高单体动力蓄电池电压及其组号(1~12:蓄电池电压,0.01V/bit;13~16:动力蓄电池电池电压所在组号:1/bit,偏移量:1BYTE5BYTE6当前SOC(1%的比例,偏移量:0BYTE7估算剩余充电时间(1min/bit,大于600分钟按600分钟发送BYTE83、ID:1812F456(PGN=4608(充电机发送给BMS,充电机充电状态,数据长度6个字节,周期50msBYTE0充电电压输出值(0.1V/bit,偏移量:0VBYTE1BTYE2充电电流输出值(0.1A/bit,偏移量:-400ABYTE3BYTE4累计充电时间(1min/bit,最大为600minBYTE54、ID:181356F4(PGN=4864(BMS发送给充电机,电池状态信息,数据长度7个字节,周期250msBYTE0最高单体动力蓄电池电压所在编号BYTE1最高动力蓄电池温度(1度/bit,偏移量:-50BYTE2最高温度检测点编号BYTE3最低动力蓄电池温度(1度/bit,偏移量:-50BYTE4最低动力蓄电池温度检测点号BYTE5Bit0-bit1单体动力蓄电池电压过高/过低(00:正常;01:过高;10:过低Bit2-bit3整车动力蓄电池荷电状态SOC过高/过低(00:正常;01:过高;10:过低Bit4-bit5动力蓄电池充电过电流(00:正常;01:过流;10:不可信Bit6-bit7动力蓄电池温度过高(00:正常;01:过高;10:不可信 BYTE6Bit0-bit1动力蓄电池绝缘状态(00:正常;01:不正常;10:不可信 Bit2-bit3动力蓄电池组输出连接器连接状态(00:正常,01:不正常,10:不可信Bit4-bit5充电允许(00:禁止;01:允许5、ID:181556F4(PGN=5376(BMS发送给充电机,电池单体电压信息,数据长度不定,周期1s,需要通过多包发送,多包发送过程见后文BYTE01号单体动力电池电压BYTE1BYTE22号单体动力电池电压BYTE3BYTE43号单体动力电池电压BYTE5、、、、、、、、、、、、BYTE511256号单体动力电池电压6、ID:181656F4(PGN=5632(BMS发送给充电机,电池温度信息,数据长度不定,周期1s,需要通过多包发送,多包发送过程见后文BYTE0动力蓄电池1温度信息(比例:1度/bit,偏移量:-50度BYTE1动力蓄电池2温度信息(比例:1度/bit,偏移量:-50度BYTE2动力蓄电池3温度信息(比例:1度/bit,偏移量:-50度BYTE3动力蓄电池4温度信息(比例:1度/bit,偏移量:-50度BYTE4动力蓄电池5温度信息(比例:1度/bit,偏移量:-50度BYTE5动力蓄电池6温度信息(比例:1度/bit,偏移量:-50度、、、、、、、、、、、、BYTEN动力蓄电池N+1温度信息(比例:1度/bit,偏移量:-50度7、ID:181756F4(PGN=5888(BMS发送给充电机,电池预留报文,数据长度不定,周期1s,需要通过多包发送,多包发送过程见后文BYTE0预留BYTE1预留BYTE2预留BYTE3预留BYTE4预留BYTE5预留、、、、、、预留BYTEN预留8、ID:101956F4(PGN=6400(BMS发送给充电机,BMS中止充电,数据长度4个字节,周期10msBYTE0BMS中止充电原因BYTE1BMS中止充电故障原因BYTE2BYTE3BMS中止充电错误原因说明:1、BMS中止充电原因:a1~2位:达到所需求的SOC目标值(00:未达到,01:达到需求,10:不可信状态; b3~4位:达到总电压的设定值(00:未达到总电压设定值,01:达到设定值,10: 不可信状态;c5~6位:达到单体电压的设定值(00:未达到,01:达到,10:不可信状态2、BMS中止充电故障原因:a1~2位:绝缘故障(00:正常,01:故障,10:不可信状态b3~4位:输出连接器过温故障(00:正常,01:故障,10:不可信状态c5~6位:BMS原件、输出连接器过温(00:正常,01:故障,10:不可信状态d7~8位:充电连接器故障(00:正常,01:故障,10:不可信状态e9~10位:电池组温度过高故障(00:正常,01:故障,10:不可信状态f11~12位:其它故障(00:正常,01:故障,10:不可信状态3、BMS中止充电错误原因:a1~2位:电流过大(00:正常,01:电流超过需求值,10:不可信状态b3~4位:电压异常(00:正常,01:电压异常,10:不可信状态9、ID:101AF456(PGN=6656(充电机发送给BMS,充电机中止充电,数据长度4个字节,周期10ms BYTE0充电机中止充电原因BYTE1充电机中止充电故障原因BYTE2BYTE3充电机中止充电错误原因说明:1、充电机中止充电原因:a1~2位:达到充电机设定的条件中止(00:正常,01:达到设定条件中止,10:不可信状态b3~4位:人工中止(00:正常,01:人工中止,10:不可信状态c5~6位:故障中止(00:正常,01:故障中止,10:不可信状态2、充电机中止充电故障原因: a 1~2 位:充电机过温故障(00:温度正常,01:充电机过温,10:不可信状态) b 3~4 位:充电连接器故障(00:连机器正常,01:故障,10:不可信状态) c 5~6 位:充电机内部过温故障(00:内部温度正常,01:内部过温,10:不可信) d 7~8 位:所需电量不能传送(00:传送正常,01:不能传送,10:不可信) e 9~10 位:充电机急停故障(00:正常,01:急停,10:不可信状态) f 11~12 位:其它故障(00:正常,01:故障,10:不可信状态)3、充电机中止充电错误原因: a 1~2 位:电流不匹配(00:电流匹配,01:电流不匹配,10:不可信状态) b 3~4 位:电压异常(00:正常,01:异常,10:不可信状态)四、充电结束阶段: 1、ID:181C56F4 (PGN=7168 (BMS 发送给充电机,BMS 统计数据,数据长度 7 个字节,周期 250ms) BYTE0 BYTE1 BYTE2 BYTE3 BYTE4 BYTE5 BYTE6 动力蓄电池最低温度(比例:1,偏移量:-50)动力蓄电池最高温度(比例:1,偏移量:-50)动力蓄电池单体最高电压(比例:0.01,偏移量:0)中止时 SOC 值(比例:1%,偏移量:0)动力蓄电池单体最低电压(比例:0.01,偏移量:0) 2、ID:181DF456 (PGN=7424 (充电机发送给 BMS,充电机统计数据,数据长度 5 个字节,周期 250ms) BYTE0 BYTE1 BYTE2 BYTE3 BYTE4 充电机编号累计输出能量(比例:0.1kw·h,偏移量:0,范围:0~1000)累计充电时间(比例:1min,偏移量:0,范围:0~600)五、发生错误: 1、ID:081E56F4 (PGN=7680 (BMS 发送给充电机,BMS 统计数据,数据长度 4 个字节,周期 250ms) BYTE0 Bit0-Bit1 Bit2-Bit3 BYTE1 Bit0-Bit1 Bit2-Bit3 BYTE2 Bit0-Bit1 接受 SPN2560=0X00 充电机辨识报文超时(00 :正常,01 :超时,10:不可信状态)接受 SPN2560=0XAA 充电机辨识报文超时(00:正常,01 :超时,10:不可信状态)接受充电机的时间同步和充电机最大能力报文超时( 00:正常,01:超时,10:不可信状态)接受充电机完成充电准备报文超时(00:正常, 01:超时, 10:不可信状态)接受充电机充电状态报文超时(00:正常,01:超时, 10:不可信状态)Bit2-Bit3 BYTE3 Bit0-Bit1 接受充电机中止报文超时( 00:正常,01:超时,10:不可信状态)接受充电机充电统计报文超时(00:正常,01:超时, 10:不可信状态) 2、ID:081FF456 (PGN=7936 (充电机发送给 BMS,充电机中止充电,数据长度 4 个字节,周期 250ms) BYTE0 BYTE1 Bit0-Bit1 Bit0-Bit1 Bit2-Bit3 BYTE2 Bit0-Bit1 Bit2-Bit3 Bit4-Bit5 BYTE3 Bit0-Bit1 接受 BMS 和车辆的辨识报文超时(00:正常,01:超时,10:不可信状态)接受电池充电参数报文超时(00:正常, 01:超时,10:不可信状态)接受 BMS 完成充电前准备报文超时(00:正常,01:超时, 10:不可信状态)接受电池充电总状态报文超时(00:正常,01:超时, 10:不可信状态)接受电池充电需求报文超时(00:正常,01:超时,10:不可信状态)接受 BMS 中止充电报文超时(00:正常,01:超时,10:不可信状态)接受 BMS 充电统计报文超时(00:正常,01:超时,10:不可信状态)六、多包发送过程: 1、0x1CEC56F4(BMS 请求建立多包发送,周期 50ms BYTE0 BYTE1 BYTE2 BYTE3 BYTE4 BYTE5 BYTE6 BYTE7 2、0x1CECF456(充电机应答多包发送请求,周期 50ms BYTE0 BYTE1 BYTE2 BYTE3 BYTE4 回答控制字 0x11 可发送的数据包数接下来发送的第一个数据包号 0xFF0xFF 需要发送的包数 0Xff 所装载数据的参数组群号,即其 PGN 请求控制字 0x10 需要发送的总字节数BYTE5 BYTE6 BYTE7 所装载数据的参数组群号,即其 PGN 3、0x1CEB56F4(BMS 发送多包信息,周期根据国标定义 BYTE0 BYTE1 BYTE2 BYTE3 BYTE4 BYTE5 BYTE6 BYTE7 包序号(1 到 N)需发送的内容需发送的内容需发送的内容需发送的内容需发送的内容需发送的内容需发送的内容 4、0x1CECF456(充电机响应完成多包接收,周期 50ms BYTE0 BYTE1 BYTE2 BYTE3 BYTE4 BYTE5 BYTE6 BYTE7 接受到的总包数 0Xff 所装载数据的参数组群号,即其 PGN 请求控制字 0x13 接受到的总字节数深圳市聚电新能源科技有限公司武继坤整理。
汽车CAN-BUS介绍
汽车CAN-BUS介绍CAN是控制器局域网络的英文缩写、即:Controller Area Network. BUS在这里指的是公共通讯-也就是我们常说的总线的意思。
既连接模块和传输数据的线路。
通过CAN进行的数据通讯是一种串行数据通讯。
早在1980年,BOSCH 的工程师们就开始研究在轿车上的串行数据通讯系统,他们发现还没有一种适合所有车辆的网络通讯协议,于是BOSCH在1983年开始开发一种全新的串行总线系统,新的总线系统还提供一项新的功能--减少线束的使用量,但这并不是促使CAN开发的主要原因,梅赛德斯-奔驰的工程师们对新的串行数据总线系统的研究比较早,INTEL公司是他们的主要半导体供应商,德国的沃尔夫哈德-劳伦兹博士将这种新的网络协议命名为CAN(Controller Area Network),霍斯特-威茨迪恩博士也在理论上给予了支持。
在1986年2月,BOSCH向底特律的SAE委员会介绍了这种多功能的网络通讯协议,1987年,INTEL公司研制成功了第一片应用于CAN的芯片:82526 在短短的4年里,一个想法变成了现实,不久PHILIPS公司也开发出了应用于CAN的芯片82C200.在当时,这两款最早的芯片在数据接收到过滤和信息的处理上有很大的不同。
INTEL比较推崇Full CAN的理念,PHILIPS使用的则是Basic CAN的理念。
在今天,更多的信息处理及数据接收方式都可以同时存在于同一个芯片当中。
使用CAN-BUS的优势使用CAN-BUS的优势是显而易见的:一,节约线束的使用二,减少了不必要的线路插头三,减少了不必要的传感器的使用四,实现了信息资源的共享五,数据传输更快CAN-BUS的应用领域一,车辆控制二,船只电气控制三,飞机及航空器控制四,工业制动化控制五,电梯或自动扶梯控制六,非工业控制领域七,医疗器械领域CAN-BUS的历史1983年 BOSCH开始开发应用于车辆数据通讯的网络系统1986年向SAE协会介绍CAN协议并正式发布1987年英特尔(LNTEL)及菲利普半导体(Philip Semiconductors)研制出第一款CAN芯片1991年 BOSCH CAN2.0发布1991年 CAN家族高级扩展(Higher-Layer)协议发布1992年 CiA(CAN in Automation)国际用户及制造商集团成立1992年 CAN实用扩展协议(CAN Application Layer)发布1992年梅赛德斯-奔驰第一次在车辆上使用CAN网络1993年 ISO 11898标准发布1994年 CiA成立第一个国际CAN协会组织(CAN Conference Organization)1994年 Allen-Bradley公司发布设备网络协议(DeviceNet protocol) 1995年 ISO 11898修订版发布1995年 CiA发布CANopen协议2000年 TTCAN (Time-Triggered communication Protocol)发布在1986年,Robert Bosch公司向SAE介绍了CAN串行数据总线系统,历史上最成功的网络协议诞生了.在今天,欧洲的汽车制造商们制造的每一辆轿车都至少应用了一种CAN系统.CAN也应用在其他种类的汽车上,在全世界范围内,CAN必将引领串行数据通讯的潮流.CAN-BUS的基本概念CAN的标准。
canbus协议
canbus协议CAN总线协议(Controller Area Network)是一种串行通信协议,最初由Bosch 公司在1986年提出,用于汽车中的内部通信。
CAN总线协议被广泛应用于汽车电子系统、工业控制系统和其他领域,因其高可靠性和实时性而备受青睐。
首先,CAN总线协议采用了一种非常灵活的通信方式,可以支持多个设备在同一总线上进行通信。
这种特性使得CAN总线协议非常适合用于汽车中的各种传感器和执行器之间的通信,比如发动机控制单元(ECU)、防抱死制动系统(ABS)、空调控制系统等。
通过CAN总线,这些设备可以方便地相互通信,实现车辆各个部件之间的信息交换和协调工作。
其次,CAN总线协议具有很高的抗干扰能力。
在汽车这样一个复杂的电磁环境中,很容易受到各种干扰,比如电磁干扰、温度变化、电压波动等。
CAN总线协议采用了差分信号传输和消息优先级机制,能够有效地抵御这些干扰,保证通信的稳定性和可靠性。
此外,CAN总线协议还具有较高的实时性。
在汽车中,很多控制任务都需要在极短的时间内完成,比如发动机点火、制动系统响应等。
CAN总线协议采用了基于事件驱动的通信方式,能够快速地传输数据并实时响应,满足了汽车电子系统对实时性的要求。
另外,CAN总线协议还具有很好的可扩展性。
随着汽车电子系统的不断发展和升级,对通信带宽和数据传输速率的需求也在不断增加。
CAN总线协议支持多种数据传输速率,从最初的125kbps到目前的1Mbps,甚至更高,能够满足不同应用场景的需求。
总的来说,CAN总线协议作为一种成熟、可靠的串行通信协议,已经在汽车电子系统和工业控制系统中得到了广泛的应用。
它的灵活性、抗干扰能力、实时性和可扩展性,使得它成为了当前最受欢迎的通信协议之一。
随着汽车电子系统的不断发展和智能化水平的提升,相信CAN总线协议还将继续发挥重要作用,并不断得到完善和拓展。
纯电动轿车主控制器CAN总线接口设计及应用概要
文章编号:100422261(20040120010203纯电动轿车主控制器CAN 总线接口设计及应用Ξ汪葵,谢辉,周能辉(天津大学内燃机国家重点实验室,天津300072摘要:一种基于C AN 总线的网络具有速度高,抗干扰性强和通用低成本的特点.在国家“863”项日电动轿车开发中应用了C AN 总线网络,给出了软硬件接口设计.实际应用表明,C AN 总线的软硬件接口设计是可行的.关键词:通信;总线;电动轿车中图分类号:U463.3文献标识码:ACAN bus inte rface ’s design in the application ofpow er train controller of pure electric automobileW ANG K ui ,XIE Hui ,ZH OU Neng 2hui(Natimae Emission ancl C ombustion Cabtory ,T ianjin University ,T ianjin 300372,ChinaAbstract :A kind of communication netw ork based on C AN bus has the advantage of high trans ferrate ,stronger inter 2ference resistance ,g ood generality and lowercost ,etc.The C AN bus netw ork has been applied in an electric vehicle of the“863”plan.The actual use has proved that the software and hardware design of the C AN interface can meet the demands of the electric vehicle.K eyw ords :communication ;C AN ;electric vehicle1电动汽车动力总成控制系统结构纯电动轿车动力总成控制系统主要包括:主控制器、电机驱动控制器、动力电池管理器和监控终端.它们之间通过C AN 总线交换信息,见图1.图1动力总成系统结构Fig.1Structure of the pow er train system电机驱动控制器执行扭矩指令,并对电机状态进行监控;电池管理器对电池的电气参数和热参数测量,完成电量计算和安全管理;监控终端显示整车各个系统的状态,并完成匹配标定工作;主控制器对纯电动轿车动力链的各个环节进行管理、协调和监控,提高纯电动轿车整车能量利用效率,确保车辆安全性和可靠性.主控制器主要执行以下功能:汽车驱动控制、制动能量回馈优化控制、整车能量优化管理、网络管理、故障诊断及保护和车辆状态监视等.要完成这些复杂的功能,有必要对电动汽车公共数据实行共享,而且必须保证动态信息的实时性.在此采用C AN2.0B 扩展格式,波特率设为250K B/s [1].2主控制器CAN 接口设计主控制器采用MOT ORO LA 公司的MC68376微处理器,它的内部集成了一个功能完善C AN 控制器T ouΞ收稿日期:2003209210基金项目:国家863电动汽车重大专项课题资助项目(2002AA501612第一作者:汪葵(1977—,男,硕士第20卷第1期2004年3月天津理工学院学报JOURNA L OF TIAN JIN INSTITUTE OF TECHN OLOG Y V ol.20N o.1Mar.2004C AN,可用于汽车和工业控制系统的C AN协议通讯,支持2.0B指定的标准识别符和扩展识别符消息格式.下面简单介绍一下T ou2C AN模块的功能特征:1T ouC AN模块有16个消息缓冲区,每一个消息缓冲区可以灵活定义为发送(TX缓冲区或接收(RX缓冲区.该模块具有消息过滤器,每一个消息缓冲区分别定义一个中断标志位,作为发送或接收成功完成的标志.2T ouC AN模块对消息缓冲区采用“激活/停滞”机制.3T ouC AN模块的“加锁/释放/忙”机制,确保接收过程中数据的连贯一致性.2.1T ouC AN接口硬件设计图2为主控制器的T ouC AN接口电路设计:总线信号采用高速光耦6N137隔离,总线系统由DC/DC电源独立供电,增强系统硬件抗干扰性.图2中82C250是C AN控制器和物理层总线之间的接口, 具有抗汽车环境下的瞬间干扰、保护总线的能力,该器件提供对总线信号的差分发送和差分接收.考虑到电动汽车的干扰比较大,在硬件配置重点作了如下考虑:图2CAN接口硬件电路设计Fig.2CAN interface h ardw are design1总线两个最远端匹配120Ω的电阻.实践表明,忽略掉它们,会使数据通信的抗干扰性和可靠性大大降低,甚至无法通信.282C250第8脚与地之间的电阻称为斜率电阻.本设计中把该引脚直接与地相连,系统处于高速工作方式.为避免射频干扰,使用了屏蔽双绞线作总线.3给C AN模块供电的电源采用单独供电的方式, 使总线与车载电源完全隔离.4总线负载应在300 0以下.2.2T ouC AN接口软件设计当通过滤波验收的数据报文被接收后,将有两种接受模式:一种是查询方式,查询接收状态位被置高表示接收缓存器有数据;另一种是中断方式,若接收中断位允许,则触发中断.为提高抗干扰性,系统采用主程序查询方式对接收数据进行处理.并用广播方式发送. 整个T ouC AN接口程序分为3个部分:C AN的初始化函数v oid can-init(,C AN发送函数v oid can send(,C AN接受函数v oid can2recieve(,流程图见图3.・11・2004年3月汪葵,等:纯电动轿车主控制器C AN总线接口设计及应用图3CAN通信的软件流程Fig.3the softw are flow ch art of CAN communication3结束语C AN总线通信网络在纯电动汽车中项目中得到了成功的应用,目前开发的纯电动汽车已经完成了动力性能试验和道路匹配试验,试验中C AN总线表现了很好的可靠性.整车和主控制器通过了国家认证实验室的电磁兼容测试.因此可以认为C AN总线是电动汽车动力系统控制网络的一种理想方式,采用合理的软件策略和硬件可靠性设计,C AN总线可以满足电动汽车的电磁兼容要求.参考文献:[1]邬宽明.C AN总线原理和应用系统设计[M].北京:北京航空航天大学出版社,1996.・21・天津理工学院学报第20卷第1期。
纯电动汽车中CAN总线的应用分析
纯电动汽车中CAN总线的应用分析作者:杨玉好宋晓雯来源:《中国科技博览》2018年第28期[摘要]CAN总线是为了解决汽车中测量和执行仪器之间的数据交换而研发和设计的一种现场总线,最早是在20世纪八十年代提出来的,随着科技的不断进步和发展的要求,汽车行业的发展也在不断的创新和演变。
现在电动汽车在市场上的应用也变得越来越普及,为了在纯电动汽车的开发中提高纯电动汽车的整体性能和其他系统的有效性,逐渐的应用到了CAN总线技术,本文研究的重点就是对CAN总线在纯电动汽车中的实际应用。
CAN总线在纯电动汽车中的实际应用的研究将更加有利于我们对于纯电动汽车的发展和创新。
[关键词]CAN总线数据交换;纯电动汽车;应用;解决措施中图分类号:TH38 文献标识码:A 文章编号:1009-914X(2018)28-0182-011 前言随着在技术上的不断进步和创新,汽车行业的发展也面临着新的挑战和机遇,纯电动汽车的应用和推广也变得越来越普及,纯电动汽车在开发中加入了CAN总线技术,所以对于CAN 总线在纯电动汽车中的应用研究对于纯电动汽车的发展是非常有意义的一项研究,也有利于进一步的推动纯电动汽车自身的创新和发展。
2 CAN总线基本认识2.1 CAN总线定时原理认识CAN总线采用的是同步的的通讯方式,这种方式要求数据的发送方和接收方必须以同步的方式来完成数据的接受,在整个数据的传输过程中都要保持较高的同步性才行,但是这是一项很难完成的工作。
CAN总线定位通过技术手段解决了这一问题。
2.2 CAN总线技术的优点CAN总线为什么能够在纯电动汽车中得到广泛的应用,那是因为CAN总线有其自身在技术上的优点,下面我们就具体看一下CAN总线的技术优点都有哪些,CAN总线在性价比上是比较高的,而且它需要的零件都比较常见,容易购买。
而且其在通讯的方式上更加的灵活,可以满足不同的定时要求。
这些只是CAN总线最被人所熟知的一些优点,它还有很多技术上的优点,这些都为其成为纯电动汽车总线技术的首先原因之一。
电动汽车CAN总线整车控制器[实用新型专利]
![电动汽车CAN总线整车控制器[实用新型专利]](https://img.taocdn.com/s3/m/b09e87e9b52acfc788ebc947.png)
专利名称:电动汽车CAN总线整车控制器专利类型:实用新型专利
发明人:杨霞,陈凯
申请号:CN201720100760.9
申请日:20170124
公开号:CN206528429U
公开日:
20170929
专利内容由知识产权出版社提供
摘要:本实用新型提出了一种电动汽车CAN总线整车控制器,包括微处理器模块以及电源模
块,CAN总线整车控制器设有脉冲量接口模块、模拟量接口模块、数字量接口模块、PWM脉宽调制模块、功率驱动模块、CAN总线模块以及最小系统;电源模块为整车控制器及外围传感器提供隔离电源,并对蓄电池电压进行监控,保证整个系统的可靠运行。
本实用新型可实现电动汽车各个子系统之间的相互通信和配合,通过CAN总线给出电机控制和电池管理指令,实现整车驱动控制、能量优化控制和制动同馈控制,进而提高整车的整体性能。
申请人:沈阳工业大学
地址:110870 辽宁省沈阳市经济技术开发区沈辽西路111号
国籍:CN
代理机构:沈阳智龙专利事务所(普通合伙)
更多信息请下载全文后查看。
纯电动乘用车CAN总线通讯协议v1.0
纯电动乘用车CAN总线通讯协议(V1.0)编制:李冬明日期:2014.11.21.审核:日期:_批准:日期:_广东陆地方舟新能源汽车电驱动系统有限公司2014年11月版本历史一、通讯协议说明1、CAN通讯协议符合J1939;2、波特率:250K;3、CAN数据长度:8 Bytes;二、网络拓扑结构三、纯电动乘用车ECU节点定义四、CAN报文说明4.1 电机控制器报文(1)电机控制器报文1控制器状态:电机控制器故障代码:采用4位数值xxxx形式表示,其中xxxx使用十进制数值表示。
(2)电机控制器报文2(3)电机发送VCU报文电机及控制器状态(1表示有效,0表示无效)4.2、电池管理系统(BMS)通讯报文BMS报文1BMS报文2BMS报文3故障报警1:故障报警2:故障报警3:BMS状态:4.3、VCU通讯报文(1)VCU发送电机控制报文1电机工作模式指令(1表示有效或正常,0表示无效或故障)注:1)对直流电压限制值,驱动工况下为最低工作电压限制值,制动工况下为最高制动电压限制值。
2)对直流电流限制值,驱动工况下为最大输出电流限制值,制动工况下为最大回馈电流限制值。
(2)VCU发送BMS报文2电池工作模式指令(3)整车控制器报文3(3)整车控制器报文4附表:Byte3定义驾驶员操作状态Bit1 脚刹开关0 表示断开;1 表示闭合;Bit2 驻车开关0 表示断开;1 表示闭合;Bit3 手刹开关0 表示断开;1 表示闭合;Bit4~5 座椅安全带00B 表示断开;11B 表示全部闭合;01B表示驾驶员处未闭合;10B 表示乘员处未闭合附表:Byte4定义换挡器状态Bit1 AMT工作模式:0表示自动模式;1表示手自一体模式;Bit2:经济/运动模式开关:0表示经济模式;1表示运动模式;Bit3~4:保留Bit5~8:0000B:空挡;0001B:一档;0010B:二档;(0011B:三档;0100B:四档;0101B:五档… 以此类推)1111B:倒档。
汽车道路性能测试系统CAN总线通信协议
汽车道路性能测试系统CAN总线通信协议张仪栋;谢东坡【摘要】结合汽车道路性能测试特点,给出制定CAN总线通信协议应遵循的基本原则,设计了网络拓扑结构,在借鉴J1939等CAN总线应用层协议的基础上设计出了适合于汽车道路性能测试的CAN总线通信协议,协议有效性在GCM06型机动车道路性能综合测试仪中得到验证.%Considering the characteristics of vehicle road testing, this paper proposed the basic principles of making the CAN bus protocol and constructed the network topology. Then, the CAN bus protocol adapting to the characteristics of vehicle road testing was designed on the basis of CAN bus application layer protocol such as J1939. And the effectiveness of the protocol has been verified by the GCM06 (the vehicle road testing system) developed independently.【期刊名称】《中国测试》【年(卷),期】2012(038)004【总页数】3页(P86-88)【关键词】道路性能试验;CAN总线;拓扑;通信协议;应用层【作者】张仪栋;谢东坡【作者单位】重庆车辆检测研究院有限公司,重庆401122;国家客车质量监督检验中心,重庆401122;重庆车辆检测研究院有限公司,重庆401122;国家客车质量监督检验中心,重庆401122【正文语种】中文【中图分类】U467.4;U416.2;TP336;TP274+.20 引言汽车道路性能测试是汽车新产品进入市场前质量检验的最后一环,非常关键。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
技术开发属于国内首创
D o m e s t i c i n i t i a t i v e
比亚迪从速锐一代开始,国内再无OBD及CAN 设备兼容 自白帽子团队打破格局,市场已经被炸开了锅 团队源于对技术的研究和执着,深度理解比 亚迪造车历史及相关技术
思路清晰、刻苦钻研、敢于创新、有效利用、超值回馈 , 我们为数百家客户带来意想不到的价值
D
C
比亚迪被破解
360破解团队将比亚迪汽 车总线破解
市场成熟
开锁,落锁,闪灯,鸣笛,
转向信号,档位信息,360 采用是请求式破解,鉴定 完毕!
谢 谢 观 看
H e r e a p p l a u s e
新能源大巴车
新能源大巴车将成为未来 出行主要运输工具
其他短程轻卡
其他短程新能源轻卡将穿 梭于城市于城市之间
新能源商用车的管理和应用将超过乘用车实现更大的价值,成为产业升级增 量最快的增长点和引爆点
持续要做的事情
A l w a y s d o s o
01
02
03
重视技术积累
速锐得将汽油车、新能源
电动车CAN总线技术持续 积累
2015
万辆,国内约20%,全球超过10%
一季度数据显示比亚迪新能源汽车销
2016 量约1.8万辆,国内市场份额约30%
一 切 皆 是 缘 分
o p p o r t u n i t y
初识比亚迪
2013年在坪山比亚迪与
深刻比亚迪
2014年在坪山比亚迪和 车企大佬一起喝砂锅粥
A B
14部15部16部团队畅谈 车联网
等待时间的回报
Gift latency time
车联网的风潮
单一化钻研领域
万物互联趋势
多年日积月累
客户伙伴的支持
新能源市场成熟
无论是国内还是国外,速锐得获得销量与口碑增长,具备独家的核心技术 。
破 局 四 类 管 理
Management needs
金融管理
02
CRM 管理
TBOX 车载
04
后装用户
重视行业引导
引导行业往更安全、更简
洁、更快速更稳定的方向 发展
重视用户需求
重视和有效满足用户需求
并将好的创意和方法归纳 总结
比亚迪汽车持续升温
S a l e s i n c r e a s e 2013 2012年8月速锐上市,OBD不支 持,标准OBD无任何效果 2014 继续比亚迪S6之后推出比亚 迪S7,新的平台并不友好 2015年,比亚迪新能源汽车销售约5.8
03
可有效补充市场空白领域,借助第四代移动通讯技术,服务于物联网金融、 CRM 、车载 TBOX 及后装汽车电子产品,为用户提供更多对汽车的应用
New
新 能 源 商 用 车
energy commercial
vehicles
新能源物流车
新能源物流车将是未来最 大增量市场
新能源工具车
新能源工具车在未来集团 用户市场不可或缺
比亚迪新能源汽车CANBUS 总线协议开发研究成果
VIN
总里程
SOC
瞄 准 的 市 场
出租车管理
1、太原5000辆 2、深圳不详
车队管理
比亚迪E6一共销售大 约1.5万辆均为车队
80%
比亚迪 2015 年销售 44.04 万辆, 2016 年销售约 14 万辆,新车 型均采用 CANBUS_11bit_500K 总线协议, CAN 总线数据 ID 大 约 48 个,速锐得科技针对比亚迪系列车型进行 CAN 总线研究 覆盖大约 80% 车型