数字系统时钟抖动
时钟抖动度量指标和测试方法概述
PAGE 068定位导航与授时Positioning,Navigation and Timing时钟抖动度量指标和测试方法概述■ 龙丹(海军工程大学 430033)数字通信系统中,时钟抖动是影响通信质量的因素之一,在系统设计、设备研制、工程验收等各环节抖动指标是必须考虑的。
本文介绍了通信中常用的抖动概念、分类、度量指标和测试方法,并对时钟设备抖动指标测试进行了描述。
最后对抖动测试的发展方向进行了展望。
In digital communication systems, clock jitter is one of the factors that affect communication quality, and jitter indicators must be considered in various links such as system design, equipment development, and engineering acceptance. This article introduces the jitter concepts, classifications, metrics and test methods commonly used in communications, and describes the jitter index test of clock equipment. Finally, the development direction of jitter test is prospected.时钟抖动 高速时钟同步Clock jitter; high-speed clock synchronizationDoi:10.3969/j.issn.1673-5137.2021.02.010摘 要Abstract关键词Key Words1. 背景ITU-T G.810标准中抖动的定义是“数字信号的各个有效瞬时相对其当时的理想位置(相位)的短期性偏离”,相位偏离的频率称为抖动频率,“短期”指变化的频率大于或等于10Hz(这里是通信领域传统的定义,其他领域对抖动可能有不同的定义)[1]。
pll jitter 指标
pll jitter 指标
PLL(Phase-Locked Loop)是一种控制系统,用于在输入信号和参考信号之间保持恒定的相位差。
Jitter是指时钟信号或数据信号在时间域上的抖动,即信号的周期性或稳定性受到干扰而产生的波动。
因此,PLL Jitter指标是用来衡量PLL系统中时钟信号或数据信号的抖动程度的指标。
从多个角度来看,PLL Jitter指标的重要性体现在以下几个方面:
1. 系统稳定性,PLL Jitter指标直接影响系统的稳定性和性能。
高抖动会导致时钟信号不稳定,可能导致数据传输错误或时序不准确,影响系统整体性能。
2. 信号完整性,在数字通信系统中,时钟信号的抖动会影响到数据的采样和恢复,因此PLL Jitter指标对于保证信号的完整性和准确性至关重要。
3. 设计优化,了解PLL Jitter指标可以帮助工程师优化PLL 系统的设计,选择合适的参数和器件,以最大程度地减小抖动,提
高系统性能。
4. 标准遵从,在一些行业标准中,对于PLL Jitter指标有明确的要求,特别是在高速通信和数据存储领域,因此了解和符合这些指标是非常重要的。
在实际应用中,评估PLL Jitter指标通常需要通过仪器进行测量和分析,例如频谱分析仪、时钟数据恢复器等。
工程师们会根据具体的系统要求和标准,对PLL Jitter指标进行测试和验证,以确保系统的稳定性和性能。
总之,PLL Jitter指标是衡量PLL系统性能的重要参数,对于数字通信和控制系统的设计和优化具有重要意义。
通过对PLL Jitter指标的全面了解和有效管理,可以提高系统的稳定性和可靠性,满足特定应用的要求。
输出波形上下抖动的原因

输出波形上下抖动的原因波形上下抖动(Jitter)是指信号传输过程中时间间隔的不稳定性,波形在时间轴上出现微小的漂移的现象。
它可能会导致数据传输错误、性能下降和系统故障等问题。
波形上下抖动的原因非常复杂,包括时钟不稳定性、电磁干扰、信号传输路径的不对称性,以及噪声等。
一、时钟不稳定性:时钟是所有数字系统中最重要的组件之一,它确定了数据传输的时间间隔。
时钟源的不稳定性可能是波形上下抖动的主要原因之一、时钟源可能受到温度变化、电源噪声、振荡器偏移、时钟分配器的不均匀负载等因素的影响,从而导致时钟信号的不稳定,进而引起波形上下抖动。
二、电磁干扰:电磁干扰是指周围电子设备和电磁场对信号的影响。
在现代电子设备中,特别是在高速通信和数据中心应用中,电磁辐射和电磁干扰可能会通过电源线、地线、信号线等途径影响信号的传输质量。
电磁干扰可能产生许多随机噪声,导致信号的上下抖动。
三、信号传输路径的不对称性:信号传输路径不对称可能由不同的原因引起,例如PCB布线不均匀、信号线长度不一致、不同信号层之间的耦合等。
当信号在不对称的路径上传输时,由于信号传播速度的变化,可能会出现波形上下抖动的情况。
四、噪声:五、时钟与数据的不匹配:当数据的边沿与时钟信号的边沿不完全匹配时,可能引起波形上下抖动。
这种不匹配可能由于采样时钟的相位偏移、时钟频率的差异、时钟抖动等因素引起。
不完全匹配的时钟和数据可能会导致传输错误和性能下降。
六、传输介质的特性:传输介质的特性也对波形上下抖动起着重要的影响。
例如,在高速通信中,传输介质的衰减、色散、损耗等因素都会导致波形上下抖动。
此外,传输介质的温度变化、机械振动等因素也会对信号的传输质量产生负面影响。
七、设备老化和磨损:设备的老化和磨损也可能导致波形上下抖动。
例如,电容的老化、电阻的变化、传输线的损耗等因素在长时间使用后可能会导致信号的上下抖动。
总结起来,波形上下抖动是由多个因素共同作用造成的。
这些因素包括时钟不稳定性、电磁干扰、信号传输路径的不对称性、噪声、时钟与数据的不匹配、传输介质的特性以及设备老化和磨损等。
时间抖动(jitter)的概念及其分析方法
时间抖动(jitter)的概念及其分析方法随着通信系统中的时钟速率迈入GH z级,抖动这个在模拟设计中十分关键的因素,也开始在数字设计领域中日益得到人们的重视。
在高速系统中,时钟或振荡器波形的时序误差会限制一个数字I/O接口的最大速率。
不仅如此,它还会导致通信链路的误码率增大,甚至限制A/D转换器的动态范围。
有资料表明在3GH z以上的系统中,时间抖动(jitter)会导致码间干扰(ISI),造成传输误码率上升。
在此趋势下,高速数字设备的设计师们也开始更多地关注时序因素。
本文向数字设计师们介绍了抖动的基本概念,分析了它对系统性能的影响,并给出了能够将相位抖动降至最低的常用电路技术。
本文介绍了时间抖动(jitter)的概念及其分析方法。
在数字通信系统,特别是同步系统中,随着系统时钟频率的不断提高,时间抖动成为影响通信质量的关键因素。
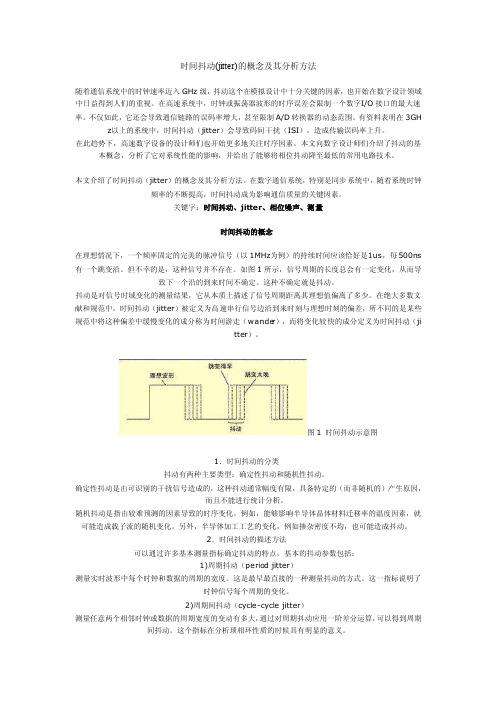
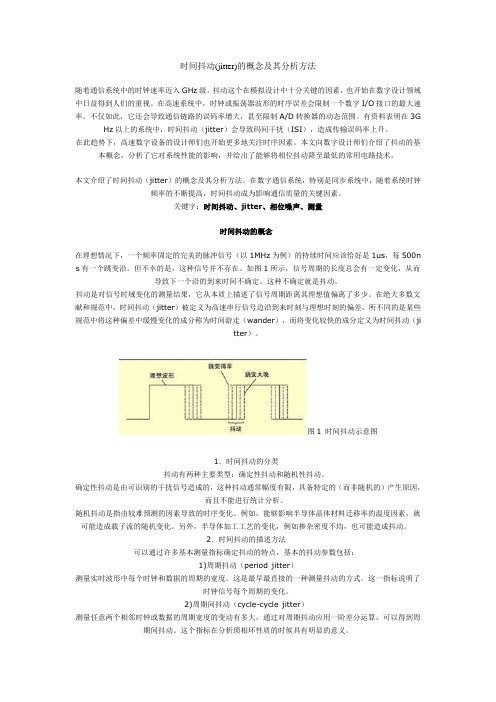
关键字:时间抖动、jitter、相位噪声、测量时间抖动的概念在理想情况下,一个频率固定的完美的脉冲信号(以1MHz为例)的持续时间应该恰好是1us,每500ns 有一个跳变沿。
但不幸的是,这种信号并不存在。
如图1所示,信号周期的长度总会有一定变化,从而导致下一个沿的到来时间不确定。
这种不确定就是抖动。
抖动是对信号时域变化的测量结果,它从本质上描述了信号周期距离其理想值偏离了多少。
在绝大多数文献和规范中,时间抖动(jitter)被定义为高速串行信号边沿到来时刻与理想时刻的偏差,所不同的是某些规范中将这种偏差中缓慢变化的成分称为时间游走(wander),而将变化较快的成分定义为时间抖动(jitter)。
图1 时间抖动示意图1.时间抖动的分类抖动有两种主要类型:确定性抖动和随机性抖动。
时钟抖动的定义与测量方式

译自: SiT-AN10007 Rev 1.2 January 2014Clock Jitter Definitions and Measurement Methods时钟抖动的定义与测量方式[译]懒兔子1 简介抖动是实际信号的一组边沿与理想信号之间的偏差(兔子:说白了,抖动就是实际情况和理想情况不一样,差别越大抖动越大)。
时钟信号的抖动通常由系统中的噪声或其他干扰因素引起。
影响因素包括热噪声、电源变化(波动)、负载的状况(负载也可以反过来影响时钟信号)、设备噪声和临近电路耦合进来的干扰。
2 抖动的分类抖动可以通过许多方式测量(不同方式测量到的抖动被分别加以定义),以下是主要的抖动分类:1. 周期抖动(Period Jitter)2. 相邻周期间的抖动(Cycle to Cycle Period Jitter)3. 长时间抖动(Long Term Jitter)4. 相位抖动(Phase Jitter)5. 单位时间间隔抖动(TIE,Time Interval Error)2.1 周期抖动周期抖动是时钟信号的实际周期长度与理想周期长度之间的偏差,测量样本为数目不定(随机)的一组周期。
如果给定一定数目的单个时钟周期,我们就可以通过测量每个周期的长度并计算平均的周期长度,以及这些时钟周期的标准差和峰峰值(peak-to-peak value)。
这里所说的标准差和峰峰值也分别被称为RMS抖动和Pk-Pk周期抖动。
许多文献将周期抖动直接定义为被测时钟周期与理想周期之间的误差。
但是真实情况下很难对理想周期进行量化。
如果我们用示波器观察一个标称100MHz的晶振,测得的平均时钟周期却可能是9.998ns,而不是理想的10ns。
所以退而求其次,通常将平均周期作为理想周期看待(兔子:因为实际周期都是在理想值周围按照一定规律分布的,如果测量时间足够长,得到的平均值就可以非常接近理想值)。
2.1.1 周期抖动的应用周期抖动对于计算数字系统的时序裕量十分有用。
dpll时钟去抖原理
dpll时钟去抖原理
DPLL(Digital Phase-Locked Loop)是一种数字锁相环技术,用于抑制时钟抖动(jitter)的影响。
时钟抖动是由外界环境和电路噪音引起的时钟信号的不稳定性和波动性。
DPLL时钟抖动抑制原理如下:
1. 参考时钟源:DPLL系统中使用一个准确且稳定的参考时钟源作为参考信号。
这个参考时钟源通常是一个高精度的晶振或外部时钟源。
2. 相频检测器(Phase Detector):DPLL系统中的相频检测器用于比较参考时钟和反馈时钟信号之间的相位差。
相频检测器的输出是一个对相位差大小和方向的度量。
3. 数字滤波器(Digital Filter):相频检测器输出的相位差信号会通过数字滤波器进行滤波和处理。
数字滤波器用于平滑相频检测器输出的相位差信号,去除高频的噪声和波动。
4. 锁定环路:系统根据经过滤波的相位差信号来调整反馈时钟信号,使其与参考时钟保持同步。
调整可以通过延迟或提前反馈时钟信号来实现。
5. VCO(Voltage-Controlled Oscillator):DPLL系统中的VCO用于产生反馈时钟信号。
调整后的相频检测器输出通过控制VCO的电压输入,以调整VCO的频率,从而使反馈时钟信号趋于与参考时钟信号同频。
6. 反馈环路:经VCO发生器产生的时钟信号经过延迟电路后反馈至相频检测器,形成闭环控制。
通过以上的反馈机制,DPLL系统可以实时对时钟抖动进行监测和调整,使得反馈时钟能够与参考时钟同频且稳定。
这样可以有效抑制时钟抖动对系统性能的影响,提高信号的稳定性和准确性。
时间抖动(jitter)的概念及其分析方法
时间抖动(jitter)的概念及其分析方法随着通信系统中的时钟速率迈入GHz级,抖动这个在模拟设计中十分关键的因素,也开始在数字设计领域中日益得到人们的重视。
在高速系统中,时钟或振荡器波形的时序误差会限制一个数字I/O接口的最大速率。
不仅如此,它还会导致通信链路的误码率增大,甚至限制A/D转换器的动态范围。
有资料表明在3G Hz以上的系统中,时间抖动(jitter)会导致码间干扰(ISI),造成传输误码率上升。
在此趋势下,高速数字设备的设计师们也开始更多地关注时序因素。
本文向数字设计师们介绍了抖动的基本概念,分析了它对系统性能的影响,并给出了能够将相位抖动降至最低的常用电路技术。
本文介绍了时间抖动(jitter)的概念及其分析方法。
在数字通信系统,特别是同步系统中,随着系统时钟频率的不断提高,时间抖动成为影响通信质量的关键因素。
关键字:时间抖动、jitter、相位噪声、测量时间抖动的概念在理想情况下,一个频率固定的完美的脉冲信号(以1MHz为例)的持续时间应该恰好是1us,每500n s有一个跳变沿。
但不幸的是,这种信号并不存在。
如图1所示,信号周期的长度总会有一定变化,从而导致下一个沿的到来时间不确定。
这种不确定就是抖动。
抖动是对信号时域变化的测量结果,它从本质上描述了信号周期距离其理想值偏离了多少。
在绝大多数文献和规范中,时间抖动(jitter)被定义为高速串行信号边沿到来时刻与理想时刻的偏差,所不同的是某些规范中将这种偏差中缓慢变化的成分称为时间游走(wander),而将变化较快的成分定义为时间抖动(jitter)。
图1 时间抖动示意图1.时间抖动的分类抖动有两种主要类型:确定性抖动和随机性抖动。
确定性抖动是由可识别的干扰信号造成的,这种抖动通常幅度有限,具备特定的(而非随机的)产生原因,而且不能进行统计分析。
随机抖动是指由较难预测的因素导致的时序变化。
例如,能够影响半导体晶体材料迁移率的温度因素,就可能造成载子流的随机变化。
时钟抖动(CLK)和相位噪声之间的转换
应用笔记3359时钟抖动(CLK)和相位噪声之间的转换摘要:这是一篇关于时钟(CLK)信号质量的应用笔记,介绍如何测量抖动和相位噪声,包括周期抖动、逐周期抖动和累加抖动。
本文还描述了周期抖动和相位噪声谱之间的关系,并介绍如何将相位噪声谱转换成周期抖动。
几乎所有集成电路和电气系统都需要时钟(CLK)。
在当今世界中,人们以更快的速度处理和传送数字信息,而模拟信号和数字信号之间的转换速率也越来越快,分辨率越来越高。
这些都要求工程师更多地关注时钟信号的质量。
时钟信号的质量通常用抖动和相位噪声来描述。
抖动包括周期抖动,逐周期抖动和累计抖动,最常用的是周期抖动。
时钟的相位噪声用来说明时钟信号的频谱特性。
本文首先简单介绍用来测量时钟抖动和相位噪声的装置。
然后介绍周期抖动和相位噪声之间的关系,最后介绍将相位噪声谱转换成周期抖动的简单公式。
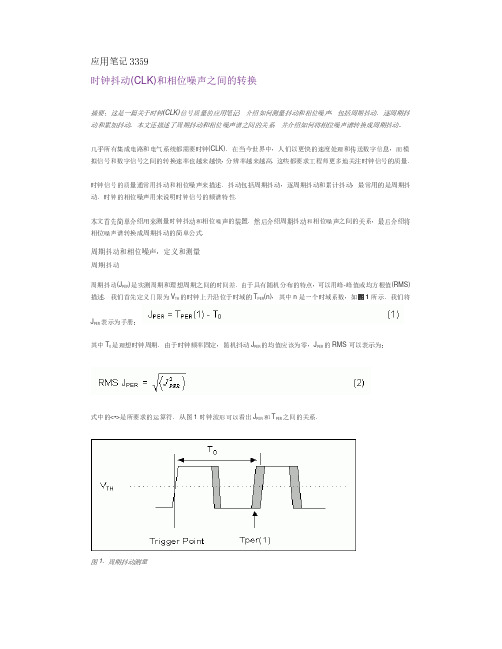
周期抖动和相位噪声:定义和测量周期抖动周期抖动(J PER)是实测周期和理想周期之间的时间差。
由于具有随机分布的特点,可以用峰-峰值或均方根值(RMS)描述。
我们首先定义门限为V TH的时钟上升沿位于时域的T PER(n),其中n是一个时域系数,如图1所示。
我们将JPER表示为手册:其中T0是理想时钟周期。
由于时钟频率固定,随机抖动J PER的均值应该为零,J PER的RMS可以表示为:式中的<•>是所要求的运算符。
从图1时钟波形可以看出J PER和T PER之间的关系。
图1. 周期抖动测量相位噪声测量为了理解相位噪声谱L(f)的定义,我们首先定义时钟信号的功率谱密度S C(f)。
将时钟信号接频谱分析仪,即可测得S C(f)。
相位噪声谱L(f)定义为频率f处的S C(f)值与时钟频率f C处的S C(f)值之差,以dB表示。
图2说明了L(f)的定义。
图2. 相位噪声谱的定义相位噪声谱L(f)的数学定义为:注意L(f)代表的是f C和f处谱值的比,L(f)将在下文介绍。
示波器进行时钟抖动测试的精度
示波器进行时钟抖动测试的精度分析抖动是指数字信号中不期望的相位调制,同时也是衡量高速数字信号质量的最重要的指标。
现在各种通信标准都对通信设备的抖动的指标有严格的要求,各种总线的一致性测试中也会对随机抖动、确定性抖动、时间间隔误差、总体抖动等有要求。
示波器是很强大的工具,目前很多windows平台的示波器都提供了一些抖动分析的软件,可以提供直方图、时间图、抖动频谱、RJ/ DJ分解、浴盆曲线等一系列漂亮的测试报告。
但是事实上,很多用户在使用示波器进行精确抖动测量时却不能得到很好的结果。
比如明明要求被测时钟的抖动小于0.5ps RMS,实际测出来却是5ps RMS,数量级的错误使得很多用户开始怀疑测量结果和测量方法的可信程度。
这些错误结果的出现除了部分是由于对抖动概念理解不够从而设置错误外,还有很大一部分原因是不了解所使用的示波器的抖动测量能力,也就是您在使用的这台示波器究竟能测量到多小的抖动,以及和那些因素有关。
衡量示波器实际能测量到的最小的抖动的指标是抖动测量本底(J itter measurement floor)。
如果被测件的实际抖动小于示波器的抖动测量本底,这些抖动是不可能被测量到的。
抖动测量本底这个指标和示波器的采样时钟抖动、底噪声以及被测信号都有关系,其表现为示波器对测量结果增加的随机抖动的大小。
由于不同示波器厂商用不同的方法定义抖动测量本底,这就要求购买或使用示波器的工程师深入理解不同指标定义的含义。
通常用来衡量示波器抖动测量能力的指标有2个:固有抖动(Int rinsic Jitter)和抖动测量本底(Jitter Measurement Floor)。
这2个指标间有关系但又不完全一样,下面就来解释一下。
1、固有抖动示波器的固有抖动,有时又叫采样时钟抖动,是指由于示波器内部采样时钟误差所造成的抖动。
由于现在高带宽示波器的采样时钟频率都非常高,可高达80G/s或者更高,因此要保证每一个实际的采样点都落在其应该在的理想位置是个非常有挑战性的工作。
时钟抖动与相位噪声的关系

时钟抖动与相位噪声的关系时钟抖动与相位噪声是与时钟信号相关的两个重要概念。
时钟抖动是指时钟信号在时间上的偏离,并且是不可避免的。
而相位噪声则是指时钟信号的相位发生随机变化的程度,反映了时钟信号的稳定性。
时钟抖动与相位噪声之间存在紧密的关系。
时钟抖动会直接影响到时钟信号的相位稳定性,进而引起相位噪声的增加。
当时钟抖动增大时,由于相位稳定性下降,时钟信号的相位就会出现较大的波动,从而导致相位噪声的增加。
因此,时钟抖动是相位噪声的一个主要原因。
时钟抖动的产生是多方面因素共同作用的结果。
其中,温度、振荡电源的稳定性、时钟信号传输中的干扰等都会对时钟抖动产生影响。
这些因素会改变时钟信号的周期性和稳定性,进而导致时钟抖动的产生。
另外,时钟自身的设计和制造工艺也会对时钟抖动产生影响。
因此,在设计和制造时钟时,需要考虑这些因素,减小时钟抖动,从而减少相位噪声。
为了降低时钟抖动和相位噪声,可以采取一些有效的措施。
首先,优化时钟设计和制造工艺,采用高稳定性的振荡器和电源,减少外界干扰等,可以有效降低时钟抖动和相位噪声。
其次,使用合适的时钟同步技术,如锁相环(PLL)等,可以对时钟信号进行精确同步,从而减小相位噪声。
此外,合理设计时钟引入电路也可以改善时钟信号的稳定性,减少时钟抖动和相位噪声。
时钟抖动与相位噪声的关系对于各种应用领域都具有重要的指导意义。
在通信系统、雷达系统、测量仪器等高精度应用中,时钟信号的稳定性直接影响到系统的性能。
因此,通过控制时钟抖动和相位噪声,可以提高系统的性能和可靠性。
此外,在数字信号处理、频谱分析等领域中,时钟抖动和相位噪声的特性也是需要注意的,因为它们可能对信号的采样和处理产生不可忽视的影响。
综上所述,时钟抖动与相位噪声之间存在着紧密的关系。
时钟抖动会导致相位稳定性下降,进而引起相位噪声的增加。
合理设计时钟、优化时钟同步技术和降低外界干扰等措施可以降低时钟抖动和相位噪声。
对于各种应用领域来说,控制时钟抖动和相位噪声是提高系统性能和可靠性的重要手段。
时钟抖动和相位噪声对采样系统的影响
时钟抖动和相位噪声对采样系统的影响时钟抖动是指时钟信号的时间偏离其期望值的现象。
在实际应用中,时钟信号不可避免地会有抖动存在,主要是由于时钟发生器的不稳定性、环境温度的变化、电源波动等因素引起的。
时钟抖动会导致采样系统的时序不准确,从而引入额外的噪声和失真。
时钟抖动对采样系统的影响主要体现在以下几个方面:1.时间抖动:时钟信号的时间抖动会导致采样时刻的不准确性,即采样时刻与理想时刻存在偏差。
时间抖动会引入额外的误差,降低采样的准确性。
2.采样间隔不均匀:时钟抖动会导致采样间隔不均匀,即采样点之间的时间间隔不一致。
采样间隔的不均匀会引起谱线畸变、频谱泄漏等问题。
3.时钟漂移:时钟抖动还可能引起时钟的频率偏移,即时钟信号的频率在长时间内发生变化。
时钟漂移会导致采样频率的不稳定性,从而引入额外的误差。
相位噪声对采样系统的影响主要体现在以下几个方面:1.频谱扩展:相位噪声会导致采样信号的频谱扩展,即频谱的带宽变宽,从而在频域上引入额外的噪声。
频谱扩展会降低采样系统的信号和噪声比(SNR)。
2.时钟失真:相位噪声会导致时钟信号的相位不稳定,进而引起采样时钟的失真。
时钟失真会导致采样时刻的不准确性,从而降低采样系统的准确性。
3.时钟频偏:相位噪声还可能引起时钟信号的频率偏移,即时钟信号的频率在短时间内产生变化。
时钟频偏会导致采样频率的不稳定性,进而影响采样信号的恢复和重构。
针对时钟抖动和相位噪声对采样系统的影响,有一些常见的解决方法和技术可以应用:1.时钟抖动:可以采用外部稳定的时钟源,如石英晶体振荡器,来提供准确的时钟信号。
此外,也可以采用时钟同步和校准的技术,通过校准时钟源的偏差和抖动,以保证采样系统的时序准确性。
2.相位锁定环(PLL):相位锁定环是一种常用的技术,用于减小时钟信号的相位噪声。
相位锁定环通过对时钟信号的频率和相位进行反馈调整,使得时钟信号的相位模糊和频谱扩展得到减小。
3.数字滤波器:可以采用数字滤波器来抑制时钟抖动和相位噪声对采样信号的影响。
Jitter知识--时基时基抖动

Jitter知识--时基/时基抖动原著:Charles Altmann编译:王轩骞(hotpoint)1、什么是jitter所谓jitter就是一种抖动。
具体如何解释呢?让我们来看一个例子。
假如你有个女友,你希望她每天晚上下班之后7点来找你,而有的时候她6:30到,有的时候是7:23,有的时候也许是下一天。
这种时间上的不稳定就是jitter。
如果你多观察这种时间上的不规律性,你会对jitter有更深一些的理解。
在你观察的这段期间内,女友最早和最晚到来的时间被称为“jitter全振幅”(peak to peak jitter amplitude)。
“jitter半振幅”(jitter-amplitude)就是你女友实际来的时间和7点之间的差值。
女友来的时间有早有晚,jitter半振幅也有正有负。
通过计算,你可以找出jitter半振幅的平均值,如果你能够计算出你女友最有可能在哪个时间来,你就可以发现女友来的时间是完全无规律的(随机jitter radeom jitter)还是和某些特定事情有关系(关联jitter correlated jitter)。
所谓关联jitter就是比如你知道你的女友周四要晚来,因为她要去看她的妈妈。
如果你能彻底明白这点,你就已经是一个correlated jitter的专家了。
2、什么是时基抖动(Clock jitter)在数字音频中,我们要直接和数字信号的发送与传输打交道。
声音以二进制编码被储存在光盘或者DAT卡带中,在回放音乐的时候,这些010101的信号被送进DA转换器(Digital-Analog converter)并被还原为模拟波形信号;在录制数字音频的时候,一个参考时钟信号会和音频信息一起被送进AD转换器(Analog-Digital converter),转换器把模拟信号转换为0101的数字信号并且记录下来。
数字信号总是和一个参考时钟信号一起传送并且记录,一些数字音频传输格式如S/PDIF和AES/EBU,它们在一个信号中同时传送数据和时钟。
信号抖动的种类与测量
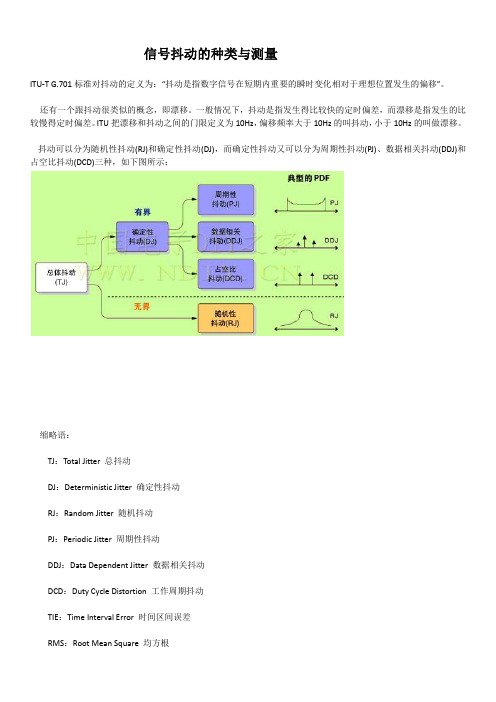
信号抖动的种类与测量ITU-T G.701标准对抖动的定义为:“抖动是指数字信号在短期内重要的瞬时变化相对于理想位置发生的偏移”。
还有一个跟抖动很类似的概念,即漂移。
一般情况下,抖动是指发生得比较快的定时偏差,而漂移是指发生的比较慢得定时偏差。
ITU把漂移和抖动之间的门限定义为10Hz,偏移频率大于10Hz的叫抖动,小于10Hz的叫做漂移。
抖动可以分为随机性抖动(RJ)和确定性抖动(DJ),而确定性抖动又可以分为周期性抖动(PJ)、数据相关抖动(DDJ)和占空比抖动(DCD)三种,如下图所示:缩略语:TJ:Total Jitter 总抖动DJ:Deterministic Jitter 确定性抖动RJ:Random Jitter 随机抖动PJ:Periodic Jitter 周期性抖动DDJ:Data Dependent Jitter 数据相关抖动DCD:Duty Cycle Distortion 工作周期抖动TIE:Time Interval Error 时间区间误差RMS:Root Mean Square 均方根ISI:Inter Symbol Interference 码间干扰1.随机抖动(RJ)随机抖动产生的原因很复杂,很难消除。
器件的内部热噪声,晶体的随机振动,宇宙射线等都可能引起随机抖动。
随机抖动满足高斯分布,在理论上是无边界的,只要测试的时间足够长,随机抖动也是无限大的。
高斯分布概率密度函数图形如下图所示。
所以随机抖动的锋-锋值必须伴同误码率BER表示出来,RJRMS=概率密度函数(pdf)的标准偏差:σ,随机抖动的锋-锋值RJpk-pk=N*σ,按不同的BER,N不同,如下图所示:2.确定性抖动(DJ)确定性抖动不是高斯分布,通常是有边际的,它是可重复可预测的。
信号的反射、串扰、开关噪声、电源干扰、EMI等都会产生DJ。
DJ的概率密度函数图形如下图所示:1).周期性抖动(PJ)以周期方式重复的抖动称为周期性抖动,由于可以将周期波形分解为与谐波相关的正弦曲线的傅立叶级数,因此,这类抖动有时也称为正弦抖动。
信号完整性分析基础系列之五--抖动的分类

信号完整性分析基础系列之五--抖动的分类一、峰峰值抖动、均方根抖动过去多年来用于量化抖动的最常用的方法是峰峰值抖动(Peak-to-peak Jitter)和均方根抖动(Root-Mean-Square Jitter,抖动直方图或者抖动分布的1 或者RMS 值)。
但是由于随机抖动以及非固定抖动的存在,使得抖动的峰峰值随着观察样本数量的增加而增加,因此说峰峰值抖动参数用于衡量固有抖动会很有效,但是衡量随机性抖动却会出现很大误差;相同的道理,由于固有抖动及非高斯性抖动和噪声的存在,使得抖动的直方图或者分布图不呈现完全的高斯分布,因此统计得到的抖动的1σ或者RMS值不等于真实高斯分布的1 值。
峰峰值抖动和均方根抖动均是对某一类抖动的统计分析指标。
二、相位抖动、周期抖动、相邻周期间抖动由于时钟系统是数字电路系统非常关键的一部分,直接决定了数据信号发送和接收的成败,是整个系统的主动脉,因此时钟的抖动一直备受关注。
描述时钟系统的抖动参量一般分为三类,即相位抖动(Phase jitter)、周期抖动(Period jitter)、相邻周期间抖动(Cycle to cycle jitter).1、相位抖动在数字系统中,两个逻辑电平之间的切换通常伴随着快沿的出现,这些边沿在时序上的不稳定性就叫做相位抖动(phase jitter,有时也叫累积抖动,accumulated jitter,指实际边沿位置与理想边沿位置的偏差,以时间为单位,也可以换算成弧度,角度等);相位抖动是相位噪声在数字域的等效体现,它是离散量,因此只有当边沿存在时候才有定义。
理想边沿位置一般定义在数字信号一个比特位时间间隔的整数倍位置处。
如下图1 所示为某一不会直接使用时钟的边沿来保证时序关系,而是看周期的稳定性,也就是周期的抖动,有时候时钟周期越长,可能带来保持时间余量不足。
时钟的抖动测量与分析
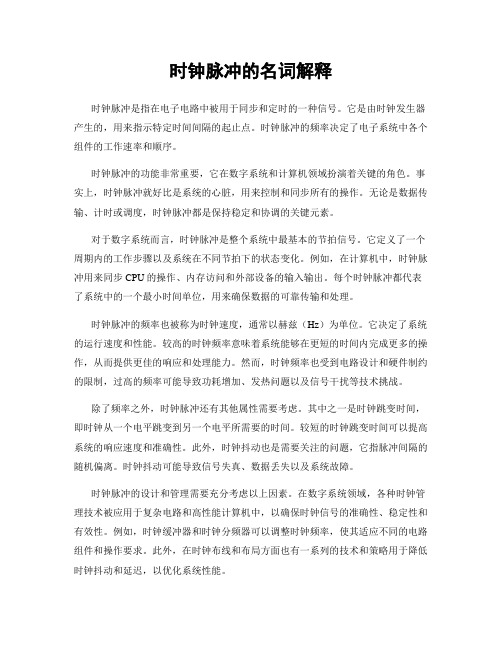
行信号接收端误码率高、系统不稳定等现象,因此时钟抖动的测量与分析非常重要。
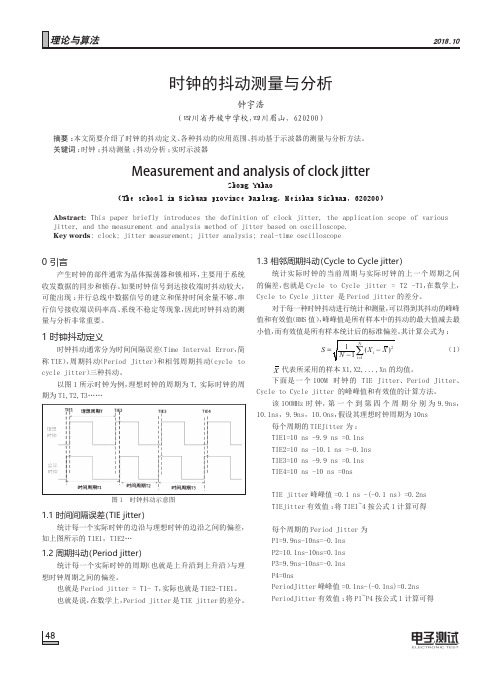
1 时钟抖动定义时钟抖动通常分为时间间隔误差(Time Interval Error,简称TIE),周期抖动(Period Jitter)和相邻周期抖动(cycle to cycle jitter)三种抖动。
以图1所示时钟为例,理想时钟的周期为T,实际时钟的周期为T1,T2,T3……图1 时钟抖动示意图1.1 时间间隔误差(TIE jitter)统计每一个实际时钟的边沿与理想时钟的边沿之间的偏差,如上图所示的TIE1,TIE2…1.2 周期抖动(Period jitter)统计每一个实际时钟的周期(也就是上升沿到上升沿)与理想时钟周期之间的偏差。
也就是Period jitter = T1- T,实际也就是TIE2-TIE1。
也就是说,在数学上,Period jitter 是TIE jitter 的差分。
对于每一种时钟抖动进行统计和测量,可以得到其抖动的峰峰值和有效值(RMS 值),峰峰值是所有样本中的抖动的最大值减去最小值,而有效值是所有样本统计后的标准偏差。
其计算公式为:S =(1)X 代表所采用的样本X1,X2,...,Xn 的均值。
下面是一个100M 时钟的 TIE Jitter、Period Jitter、Cycle to Cycle jitter 的峰峰值和有效值的计算方法。
该1OOMHz 时钟,第一个到第四个周期分别为9.9ns,10.1ns,9.9ns,10.Ons,假设其理想时钟周期为10ns每个周期的TIEJitter 为:TIE1=10 ns -9�9 ns =0�1ns TIE2=10 ns -10�1 ns =-0�1ns TIE3=10 ns -9�9 ns =0�1ns TIE4=10 ns -10 ns =0nsTIE jitter 峰峰值=0.1 ns -(-0.1 ns)=0.2ns TIEjitter 有效值:将TIE1~4按公式1计算可得每个周期的Period Jitter 为P1=9�9ns-10ns=-0�1ns P2=10�1ns-10ns=0�1ns P3=9�9ns-10ns=-0�1ns P4=0nsPeriodJitter 峰峰值=0.1ns-(-0.1ns)=0.2ns PeriodJitter 有效值:将P1~P4按公式1计算可得49(通常为幅度的 50%)的水平宽度。
数字系统时序测试

数字系统时序测试数字系统时序测试是一项关键的测试方法,用于验证数字电路的时序性能。
时序测试是保证数字系统正确运行的关键环节,因此合适的时序测试方案和测试方法对于确保系统的可靠性至关重要。
1. 时序测试的意义时序测试是验证数字系统中各个模块按照正确的时序进行工作的方法。
它通过测试输入和输出信号之间的时序关系,确认系统在不同时间点上的状态是否符合设计预期。
时序测试可以发现时钟抖动、冒险现象、编码错误等问题,从而提高系统的可靠性和稳定性。
2. 时序测试的基本原理在数字系统中,时序的正确性取决于时钟信号的稳定性和各个模块之间的信号传输时延。
时序测试通过一系列的测试模式和时钟信号,确保系统在各种条件下都能按照预期的时序进行工作。
常用的时序测试方法包括纯随机测试、伪随机测试和时钟缩放测试等。
3. 时序测试的方法3.1 纯随机测试纯随机测试是一种基于随机输入信号的测试方法,通过随机生成输入模式,检测系统在各种不确定的情况下的时序性能。
纯随机测试可以全面覆盖系统的各种操作模式,但测试时间较长且不能保证覆盖所有可能的故障。
3.2 伪随机测试伪随机测试是一种基于伪随机序列的测试方法,通过生成特定的伪随机序列来进行测试。
与纯随机测试相比,伪随机测试具有更好的覆盖率和测试效率,能够在较短的时间内发现潜在的时序问题。
3.3 时钟缩放测试时钟缩放测试是一种通过改变时钟信号的频率和占空比来测试时序性能的方法。
通过增加或减小时钟频率,可以测试系统在不同工作条件下的时序可靠性。
时钟缩放测试可以有效地发现时钟频率相关的问题,如时钟抖动、时钟偏移等。
4. 时序测试工具为了方便进行时序测试,现代数字系统设计中常常使用专业的时序测试工具。
这些工具可以自动生成不同的测试模式和测试序列,能够全面、快速地检测系统的时序性能,并生成详细的测试报告供分析使用。
5. 时序测试的实践应用时序测试在数字系统的设计和验证过程中起着重要的作用。
通过合理选择测试方法和工具,可以提高测试的效率和准确性,从而提高系统的可靠性和稳定性。
系统抖动产生的原因

系统抖动产生的原因
系统抖动,也被称为页面抖动或颠簸,是计算机操作系统中虚拟内存管理的一种现象。
当系统为进程分配的物理内存块数量小于进程所需要的最小值时,进程的运行将频繁地产生缺页中断,这种高频率的页面置换现象就称为抖动。
以下是系统抖动产生的主要原因:不合理的置换算法:如果选择的置换算法不合理,可能会导致刚被替换出去的页面立即又被访问,需要将它调入,但因无空闲内存又要替换另一页,而后者又是即将被访问的页,于是造成了系统需花费大量的时间忙于进行这种频繁的页面交换,大大降低了系统效率。
内存空间竞争:当进程数量太多,而可以使用的内存空间又不足时,每个进程分得的物理块太少,这也会引发系统抖动。
页面大小不合适:如果页面大小设置得不合理,也可能导致系统抖动。
页面太大可能导致内存碎片过多,页面太小则可能导致频繁的页面置换。
系统抖动对系统性能有着显著的影响。
首先,它增加了系统的开销,因为系统需要花费大量的时间来处理页面置换。
其次,频繁的页面置换会导致系统效率降低,甚至可能使系统趋近于瘫痪状态。
此外,系统抖动还会增加I/O操作的次数,导致系统时间更多地消耗在低速的I/O操作上。
为了减少系统抖动,可以采取一些优化措施,如优化置换算法、调整页面大小、合理分配内存空间等。
这些措施可以有效地减少页面置换的频率,提高系统的效率和稳定性。
总的来说,系统抖动是由多种因素共同作用产生的,要减少或避免系统抖动,需要从多个方面入手,综合考虑各种因素,采取合理的优化措施。
miso波形高电平抖动

miso波形高电平抖动在电子领域中,miso波形高电平抖动是一个重要的概念。
这种抖动现象通常出现在数字信号的传输过程中,特别是在通信系统和数据传输系统中。
本文将介绍miso波形高电平抖动的原因、影响以及可能的解决方案。
一、miso波形高电平抖动的原因miso波形高电平抖动的原因主要可以归结为以下几点:1. 时钟抖动:时钟信号是数字系统中非常重要的基准信号之一,而时钟抖动指的是时钟信号在传输过程中出现的微小波动。
当时钟信号的抖动幅度超过了系统的容忍范围时,就会导致miso波形的高电平抖动。
2. 噪声干扰:噪声是电子系统中不可避免的存在,而噪声干扰会对信号的传输产生一定的影响。
当噪声的幅度较大或者频谱与信号频率重叠时,就会引起miso波形的高电平抖动。
3. 传输线路问题:传输线路的质量和长度对信号传输有着重要的影响。
传输线路的电阻、电感、电容等参数都会对信号的传输特性产生影响。
当传输线路存在问题时,比如电阻不匹配或者存在反射等,就会导致miso波形的高电平抖动。
二、miso波形高电平抖动的影响miso波形高电平抖动会对系统的性能产生一定的影响,主要表现在以下几个方面:1. 误码率增加:miso波形的高电平抖动会导致信号的峰值和谷值发生变化,从而增加了信号的波动范围。
这样一来,接收端在信号采样和判决时就容易出现错误,从而导致误码率的增加。
2. 系统容量下降:miso波形高电平抖动会导致信号的功率谱发生变化,从而影响信号的频谱分布。
当信号的频谱分布发生变化时,系统的带宽利用率会下降,从而导致系统的容量下降。
3. 时钟同步问题:miso波形高电平抖动会对时钟信号产生一定的影响,从而影响系统的时钟同步性能。
当时钟信号受到抖动的影响时,接收端的时钟恢复可能会出现偏差,从而影响系统的时钟同步精度。
三、解决miso波形高电平抖动的方法针对miso波形高电平抖动问题,可以采取以下几种解决方法:1. 时钟抖动抑制:可以通过采用更稳定的时钟源,或者增加时钟抖动抑制电路来减小时钟抖动的影响。
时钟脉冲的名词解释
时钟脉冲的名词解释时钟脉冲是指在电子电路中被用于同步和定时的一种信号。
它是由时钟发生器产生的,用来指示特定时间间隔的起止点。
时钟脉冲的频率决定了电子系统中各个组件的工作速率和顺序。
时钟脉冲的功能非常重要,它在数字系统和计算机领域扮演着关键的角色。
事实上,时钟脉冲就好比是系统的心脏,用来控制和同步所有的操作。
无论是数据传输、计时或调度,时钟脉冲都是保持稳定和协调的关键元素。
对于数字系统而言,时钟脉冲是整个系统中最基本的节拍信号。
它定义了一个周期内的工作步骤以及系统在不同节拍下的状态变化。
例如,在计算机中,时钟脉冲用来同步CPU的操作、内存访问和外部设备的输入输出。
每个时钟脉冲都代表了系统中的一个最小时间单位,用来确保数据的可靠传输和处理。
时钟脉冲的频率也被称为时钟速度,通常以赫兹(Hz)为单位。
它决定了系统的运行速度和性能。
较高的时钟频率意味着系统能够在更短的时间内完成更多的操作,从而提供更佳的响应和处理能力。
然而,时钟频率也受到电路设计和硬件制约的限制,过高的频率可能导致功耗增加、发热问题以及信号干扰等技术挑战。
除了频率之外,时钟脉冲还有其他属性需要考虑。
其中之一是时钟跳变时间,即时钟从一个电平跳变到另一个电平所需要的时间。
较短的时钟跳变时间可以提高系统的响应速度和准确性。
此外,时钟抖动也是需要关注的问题,它指脉冲间隔的随机偏离。
时钟抖动可能导致信号失真、数据丢失以及系统故障。
时钟脉冲的设计和管理需要充分考虑以上因素。
在数字系统领域,各种时钟管理技术被应用于复杂电路和高性能计算机中,以确保时钟信号的准确性、稳定性和有效性。
例如,时钟缓冲器和时钟分频器可以调整时钟频率,使其适应不同的电路组件和操作要求。
此外,在时钟布线和布局方面也有一系列的技术和策略用于降低时钟抖动和延迟,以优化系统性能。
总而言之,时钟脉冲是数字系统中的基础信号,用于同步和控制各个电路元件的操作。
它的频率、跳变时间、抖动等属性决定了系统的运行速度、稳定性和准确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数字系统时钟抖动
数字系统时钟抖动是指当数字系统的时钟信号存在不稳定性或噪声时,导致时钟信号产生微小的偏移或抖动现象。
时钟信号在数字系统
中起着至关重要的作用,它用于同步各个模块的操作,确保数据的准
确传输和处理。
然而,时钟抖动会对系统的性能和可靠性产生负面影响。
本文将探讨数字系统时钟抖动的原因、后果以及应对措施。
一、时钟抖动的原因
1. 元器件误差:元器件的制造和使用过程中会存在一定的误差,例
如晶体振荡器的频率精度、时钟发生器的稳定性等。
这些误差在时钟
信号传输过程中会放大,导致时钟抖动。
2. 环境干扰:数字系统所处的环境中存在各种干扰源,如电磁波干扰、温度变化、电源波动等。
这些干扰会对时钟信号的传输和接收产
生影响,进而引起时钟抖动。
3. 信号串扰:在复杂的数字系统中,各个信号线之间会存在串扰现象,即一个信号线上的电磁场对其他信号线产生影响。
当时钟信号受
到其他信号线的串扰时,也会导致时钟抖动。
二、时钟抖动的后果
1. 时序错误:时钟抖动可能导致时钟信号的上升沿或下降沿不准确,进而造成时序错误。
这会导致数据传输出错、计时错误等问题,严重
时可能导致整个系统的崩溃。
2. 数据稳定性下降:时钟抖动会导致数据的采样和恢复不准确,使得数据的稳定性下降。
在高速数据传输中,时钟抖动可能导致数据丢失或数据错误,影响系统的可靠性和性能。
3. 时钟频率偏移:时钟抖动可能导致时钟信号的频率产生微小的偏移,进而影响系统的时钟同步和数据处理速度。
这会给系统的运行带来一定的难度和不确定性。
三、应对时钟抖动的措施
1. 选择高质量的元器件:在设计和选择数字系统的元器件时,应注重其频率精度、稳定性和抗干扰能力。
采用高质量的晶体振荡器、时钟发生器等元器件,能够减小时钟抖动的概率。
2. 优化时钟布线:合理设计时钟信号的布线路径,避免与其他信号线的干扰。
尽可能使用短而直接的时钟线路,减少串扰的可能性。
3. 电磁屏蔽和滤波:对数字系统中的时钟信号进行电磁屏蔽和滤波处理,减少来自外界的干扰。
这可以采用屏蔽罩、屏蔽线材、滤波器等措施来实现。
4. 时钟同步技术:采用适当的时钟同步技术,例如时钟提取、时钟分配和时钟重构等方法,可以有效降低时钟抖动的影响。
通过对时钟信号的控制和校正,使得时钟信号更稳定可靠。
结语
数字系统时钟抖动是一个复杂而常见的问题,需要我们在设计和应用过程中给予足够的重视。
只有采取有效的措施来减小时钟抖动,才
能确保数字系统的正常运行和可靠性。
通过合理的元器件选择、布线优化和时钟同步技术应对时钟抖动,我们能够提高系统的性能、减少数据错误,并为数字系统的发展提供更稳定可靠的时钟信号。