OMRON_CP1H_高级指令分析_六_6.3_SPED+ACC_
欧姆龙控制步进电机指令讲解
欧姆龙控制步进电机指令讲解嘿,朋友们!今天咱来聊聊欧姆龙控制步进电机指令,这可真是个有意思的玩意儿啊!你看啊,这欧姆龙就像是一个神奇的指挥官,而步进电机呢,就是那个听指挥的小兵。
想象一下,指挥官一声令下,小兵就得乖乖地行动起来,多带劲啊!欧姆龙控制步进电机指令就像是一道道神秘的密码,只有我们这些懂行的人才能解开。
比如说那个启动指令吧,就像是给小兵的起跑命令,“嘿,跑起来啦!”然后电机就开始转动啦。
还有那个速度指令,这可太重要啦!就好比你让小兵跑快点或者慢点,全靠这个指令来调节呢。
要是调得不合适,那可就乱套啦,要么跑得太快刹不住车,要么慢悠悠得让人着急。
再说说那个方向指令,这就决定了小兵往哪跑啊!是向前冲呢,还是向后退,全在我们的掌控之中。
这些指令可不是随随便便就能用得好的哦,得仔细琢磨,认真研究。
就像你要驯服一匹野马,得先了解它的脾气性格,才能驾驭得了它。
咱在使用这些指令的时候,可不能马虎大意。
就跟做饭似的,盐放多了太咸,放少了没味。
指令给错了或者给得不恰当,那电机可就不听话啦。
比如说,你明明想让它顺时针转,结果给了个逆时针的指令,那不是南辕北辙了嘛!这时候你就得拍拍脑袋,哎呀,我怎么这么糊涂呀!而且啊,不同的应用场景需要不同的指令组合。
这就跟搭积木一样,你得把不同的积木搭在一起,才能搭出你想要的形状。
你不能乱搭一气,那最后搭出来的肯定不是你想要的东西。
在实际操作中,我们可得多实践,多尝试。
就像学骑自行车,一开始可能会摔倒,但多摔几次就会骑啦!咱对这些指令也是,刚开始可能会犯错,但别怕呀,错了就改,慢慢就熟练啦。
总之呢,欧姆龙控制步进电机指令是个很有趣也很有用的东西。
只要我们用心去学,去摸索,就一定能让这个神奇的小兵乖乖听我们的话,为我们干好多好多的事情呢!难道不是吗?哈哈!。
OMRON CP1H的直线插补功能在绕线机上的应用
OMRON CP1H的直线插补功能在绕线机上的应用1 引言该客户是专注于马达生产设备开发研究和生产制造的专业企业,产品广泛应用于电动工具、吸尘器、汽车电机、摩托车起步电机等领域。
其中串激励转子绕线机、转子和整流子外圆精车机。
目前该客户正在开发一种新产品,电机定子外线圈高速绕线机。
需要用到其2轴伺服直线差补功能。
客户原开发机使用的是研华adam-5000系列的分布式io站(plc),使用其直线插补功能,操作面板使用的是中达电通的简易数控系统。
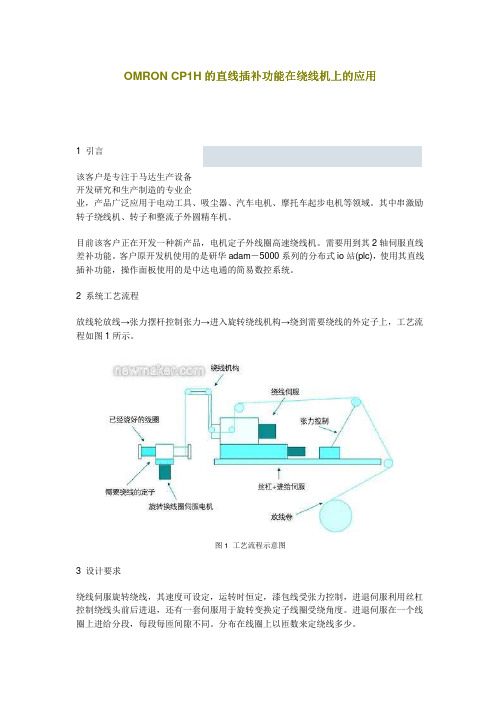
2 系统工艺流程放线轮放线→张力摆杆控制张力→进入旋转绕线机构→绕到需要绕线的外定子上,工艺流程如图1所示。
图1 工艺流程示意图3 设计要求绕线伺服旋转绕线,其速度可设定,运转时恒定,漆包线受张力控制,进退伺服利用丝杠控制绕线头前后进退,还有一套伺服用于旋转变换定子线圈受绕角度。
进退伺服在一个线圈上进给分段,每段每匝间隙不同。
分布在线圈上以匝数来定绕线多少。
绕线速度:每分钟最大3000匝(可以根据使用要求调整);每匝间距可调整,最小线宽:0.7mm。
并且不同匝宽的过渡要平稳,绕线机在换向处不能出现绕线不均匀、堆积现象。
4 方案设计及主要配置鉴于以上使用要求和机械机械结构,我们设计了如下的方案:通过丝杠导程,每段规定的匝数,每匝的间距,伺服定义的每转脉冲数可以推导出每段进给的脉冲数,即x轴方向上的puls值:p(x轴)=(d*n)/l*p(p:脉冲数;d:每匝间距;n:匝数;l:丝杠导程;p:每转脉冲数)由于设定的转速恒定,通过每段规定的匝数(即绕线的的圈数),伺服定义的每转脉冲数,即可以推导出每段绕线的长度的脉冲数,即y轴的puls值:p(y轴)= n*p(p:脉冲数;n:匝数即圈数;p:每转脉冲数)z轴用于切换调整电机定子外线圈绕线柱头,其旋转角度由电机定子外线圈绕线柱头数决定,由每次相同批次绕线前事先设定。
图2 电机定子外线圈绕线形式示意图在绕线时x轴和y轴实时联动,根据设定的好的参数,两轴分别走相应的脉冲数,每段之间匝距变换,设定加减速时间,其实这就相当于绕线伺服和进给伺服之间做一个直线插补功能。
欧姆龙高速脉冲指令
欧姆龙高速脉冲指令摘要::欧姆龙高速脉冲指令1.欧姆龙CPH 型PLC 简介2.高速脉冲指令的应用3.高速脉冲指令的使用方法4.高速脉冲指令的优势和局限5.欧姆龙高速脉冲指令在工业自动化领域的应用案例正文:欧姆龙高速脉冲指令欧姆龙CPH 型PLC 是一种广泛应用于工业自动化领域的可编程逻辑控制器。
它具有强大的控制功能和稳定的性能,可以满足各种复杂的控制需求。
在欧姆龙CPH 型PLC 中,高速脉冲指令是一种重要的控制指令,主要用于控制步进电机、伺服电机等高速运动设备。
高速脉冲指令的应用非常广泛,主要涉及到印刷、包装、纺织、机床、机器人等众多领域。
例如,在印刷行业中,高速脉冲指令可以用于控制印刷机的滚筒旋转;在包装行业中,可以用于控制包装机的封口装置;在纺织行业中,可以用于控制纺织机的纱锭旋转等。
高速脉冲指令的使用方法相对简单,可以通过编写程序实现对设备的控制。
在编写程序时,需要根据设备的具体参数和控制要求,设置适当的脉冲频率、脉冲数量等参数。
此外,还需要注意避免脉冲信号的干扰,确保控制信号的稳定性和可靠性。
欧姆龙高速脉冲指令具有以下优势:1.高速:高速脉冲指令可以实现快速、精确的控制,提高设备的运行效率和精度;2.稳定:高速脉冲指令具有较强的抗干扰能力,可以保证控制信号的稳定性和可靠性;3.灵活:高速脉冲指令可以适应不同设备的控制需求,具有较强的灵活性。
然而,欧姆龙高速脉冲指令也存在一定的局限性,如对脉冲信号的频率、幅值等参数有一定的要求,需要根据具体的设备参数进行调整。
在工业自动化领域,欧姆龙高速脉冲指令的应用案例众多。
例如,在印刷行业中,可以用于控制印刷机的滚筒旋转,实现高速、精确的印刷;在包装行业中,可以用于控制包装机的封口装置,实现高速、精确的包装;在纺织行业中,可以用于控制纺织机的纱锭旋转,实现高速、精确的纺织等。
欧姆龙cp1h常用指令学习(一)常用存储器功能区、订时器
欧姆龙cp1h常用指令学习(一)常用存储器功能区、订时器常用的存储器功能区CIO:输入继电器 272 点(17 CH) 0.00~16.15输出继电器 272 点(17 CH) 100.00~116.15内部辅助继电器 4,800 点(300 CH) 1200.00~1499.15 (1200~1499 CH)37,504 点(2,344 CH) 3800.00~6143.15 (3800~6143 CH)内部辅助继电器:8,192 点(512 CH) W000.00~W511.15 (W0~W511 CH)暂时存储继电器:16 点 TR0~TR15保持继电器:8,192 点(512 CH) H0.00~H511.15 (H0~H511 CH)特殊辅助继电器:只读(不可写入) 7168 点(448 CH) A0.00~A447.15 (A0~A447CH)可读/写 8192 点(512 CH) A448.00~A959.15 (A448~A959 CH)定时器:4,096 点 T0~T4095计数器:4,096 点 C0~C4095DM 区:32K 字 D0~D32767数据寄存器:16 点(16 位) DR0~DR15变址寄存器:16 点(32 位) IR0~IR15任务标志:32 点 TK0000~TK0031常用指令(1)订时器BCD方式 BIN方式定时器(100ms) TIM TIMX高速定时器(10ms) TIMH TIMHX超高速定时器(1ms) TMHH TMHHX注意BIN方法的订时器计数时间比BCD的要长些,例如TIM计时为999.9秒,而TIMX 为6553.5秒例子:长时间订时例子:定时器加计数器例子:时钟加计数器例子:超过9999以上的记数例子: ON/OFF电路例子:单稳态在输入为ON 后,仅输出TIM1 的设定时间例子:闪烁如果使用内部时钟脉冲(0.1 秒、 0.2 秒、 1 秒),可 便于对闪烁电路进行编程。
欧姆龙CP1H性能
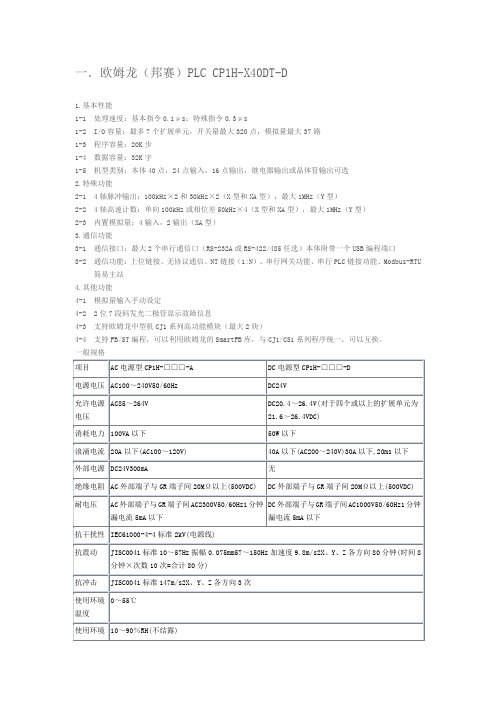
一.欧姆龙(邦赛)PLC CP1H-X40DT-D1.基本性能1-1 处理速度:基本指令0.1μs;特殊指令0.3μs1-2 I/O容量:最多7个扩展单元,开关量最大320点,模拟量最大37路1-3 程序容量:20K步1-4 数据容量:32K字1-5 机型类别:本体40点,24点输入,16点输出,继电器输出或晶体管输出可选2.特殊功能2-1 4轴脉冲输出:100kHz×2和30kHz×2(X型和XA型),最大1MHz(Y型)2-2 4轴高速计数:单向100kHz或相位差50kHz×4(X型和XA型),最大1MHz(Y型)2-3 内置模拟量:4输入,2输出(XA型)3.通信功能3-1 通信接口:最大2个串行通信口(RS-232A或RS-422/485任选)本体附带一个USB编程端口3-2 通信功能:上位链接、无协议通信、NT链接(1:N)、串行网关功能、串行PLC链接功能、Modbus-RTU 简易主站4.其他功能4-1 模拟量输入手动设定4-2 2位7段码发光二极管显示故障信息4-3 支持欧姆龙中型机CJ1系列高功能模块(最大2块)4-4 支持FB/ST编程,可以利用欧姆龙的SmartFB库,与CJ1/CS1系列程序统一,可以互换。
一般规格■性能规格※CJ高功能I/O、CJCPU总线单元的存储区与CJ系列是一样的分配。
具体请见CJ样本(编号P052-CN5-05)。
CP1H 一般规格* 上述值为AC电源:常温·冷启动时的条件、DC电源:冷启动时的条件。
·AC电源的浪涌电流限制回路中使用了热敏元件(低温时电流抑制特性)。
在环境温度较高时、电源OFF时间较短的热启动时,由于热敏元件无法充分冷却,可能会出现冲击电流值超出(最大约为上述值的2倍)上述值的情况。
选用外部回路的保险丝、断路器时,请在参考熔断、检测特性等上述内容的基础上选择有一定余量的方案。
·DC电源的冲击电流限制回路使用了电容充电型的延迟回路。
OMRON CP1H脉冲指令说明总结

s1+2 目标频率(低位) s1+3 目标频率(高位)
s1+4 脉冲输出量设定量(低位) s1+5 脉冲输出量设定量(高位)
PLS2(定位)
端口c1: 000-0003 端口指定
方向指定符: 000 cw方向, 001 ccw方向
第一个控制字s: s加速比率,s+1加速后目标频率, s+2(低四位)、s+3(高四位):输出脉冲数
ACC
端口c1: 0000-0003 端口指定
模式000:
设定表低位CH编号s: s加速比率,s+1加速后目标频率, s+2减速比率,s+3减速后目标频率 注:输出指定脉冲数后停止脉冲输出
模式001:(加速)
设定表低位CH编号s: s加速比率,s+1加速后目标频率
模式002:(减速)
设定表低位CH编号s: s减速比率,s+1减速后目标频率 注:输出指定脉冲数后停止脉冲输出
模式003:(减速)
设定表低位CH编号s: s减速比率,s+1减速后目标频率
PULS
端口指定: 0000-0003 端口指定
控制数据:
脉冲频率s: s目标频率(低位), s+1目标频率(高位)
PULS
端口c1: 0000-0003 端口指定
控制数据c2: 0000 相对脉冲输出(输出量=设定量) 0001 绝对脉冲输出(输出量=设定量-当前值)
脉冲输出量s: s脉冲输出量(低位), s+1脉冲输出量(高位)
变更数据保存低位CH编号:s变更数据(低位) s+1变更数据(高位)
CP1H操作手册.第二章.部分的名称与规格
指示 CP1H 的工作状态的 LED。
POWER 灯亮 通电时
RUN
(绿)
灯灭 未通电时
INH PRPHL
RUN (绿)
ERR/ALM (红)
灯亮 灯灭 灯亮
CP1H 正在「运行」或「监视」模式下执行程序 「程序」模式下运行停止中,或因运行停止异常而处于运行停止中 发生运行停止异常(包含 FALS 指令的执行),或发生硬件异常(WDT 异 常)
规
电位器/外部模拟设定输入」)
格
⑥外部模拟设定输入连接器 通过从外部施加 0~10V 的电压,可将 A643 CH 的值在 0~255 范围内任意变更。另外, 该输入为不隔离。(参见「6-2 模拟电位器/外部模拟设定输入」)
⑦拨动开关
No. 设定
设定内容
用途
初始值
SW1 ON 不可写入用户存储器(注) 在需要防止由外围工具(CX-Programmer) OFF
用
安装的串行通信选件板时置于 ON。
OFF 根据 PLC 系统设定
SW5 ON
在用工具总线的情况下使 需要通过工具总线来使用选件板槽位 2 上 OFF
用
安装的串行通信选件板时置于 ON。
OFF 根据 PLC 系统设定
SW6 ON A395.12 为 ON
在不使用输入单元而用户需要使某种条件 OFF
成立时,将该 SW6 置于 ON 或 OFF,在程
2-1 各部分的名称及使用方法 2-1-2 RS-232C 选件板(CP1W-CIF01)
2
各 部 分 的 各 称 及 规 格
第2章 各部分的名称及规格
2-1
2-1 各部分的名称及使用方法 2-1-1 CP1H CPU 单元
欧姆龙高速脉冲指令
欧姆龙高速脉冲指令
摘要:
1.欧姆龙CPH 型PLC 简介
2.高速脉冲输出指令的作用
3.高速脉冲输出指令的应用实例
4.总结
正文:
一、欧姆龙CPH 型PLC 简介
欧姆龙CPH 型PLC 是日本欧姆龙公司推出的一款可编程逻辑控制器,广泛应用于各种工业自动化控制场合。
其具有高速、高性能、多功能、易编程等特点,能够满足不同场合的控制需求。
二、高速脉冲输出指令的作用
高速脉冲输出指令是欧姆龙CPH 型PLC 中的一种指令,主要用于控制步进电机或伺服电机等高速脉冲驱动设备。
通过高速脉冲输出指令,可以实现对驱动设备的精确控制和调速,从而满足各种工业自动化控制场合的要求。
三、高速脉冲输出指令的应用实例
1.控制步进电机
步进电机是一种将电脉冲转换为角位移的电机,其工作原理是通过接收脉冲信号,驱动电机转动一定的角度。
欧姆龙CPH 型PLC 通过高速脉冲输出指令,可以精确控制步进电机的转速、位置和转向,实现对步进电机的精确控制。
2.控制伺服电机
伺服电机是一种通过接收脉冲信号实现角位移控制的电机。
与步进电机不同,伺服电机具有更高的控制精度和更低的转速波动。
欧姆龙CPH 型PLC 通过高速脉冲输出指令,可以实现对伺服电机的精确控制和调速,提高控制精度和运动平稳性。
四、总结
欧姆龙CPH 型PLC 的高速脉冲输出指令在工业自动化控制领域具有广泛的应用,可以实现对步进电机和伺服电机等高速脉冲驱动设备的精确控制和调速。