移动机器人硬件驱动方案的设计
基于STM32的智能循迹小车的设计

基于STM32的智能循迹小车的设计智能循迹小车是一种具有自主导航能力的智能移动机器人,能够根据预设的轨迹路径进行自主轨迹行驶。
该设计基于STM32单片机,采用感光电阻传感器进行循迹控制,结合电机驱动模块实现小车的前进、后退、转向等功能。
一、硬件设计1.MCU选型:选择STM32系列单片机作为主控芯片,具有高性能、低功耗、丰富接口等特点。
2.传感器配置:使用感光电阻传感器进行循迹检测,通过读取传感器的电阻值判断小车当前位置,根据不同电阻值控制小车行驶方向。
3.电机驱动模块:采用直流电机驱动模块控制小车的前进、后退、转向等动作。
4.电源管理:使用锂电池供电,通过电源管理模块对电源进行管理,保证系统正常工作。
二、软件设计1.系统初始化:对STM32单片机进行初始化,配置时钟、引脚等相关参数。
2.传感器读取:通过ADC模块读取感光电阻传感器的电阻值,判断小车当前位置。
3.循迹控制:根据传感器读取的电阻值判断小车相对于轨迹的位置,根据不同的位置控制小车的行驶方向,使其始终保持在轨迹上行驶。
4.电机控制:根据循迹控制的结果,通过电机驱动模块控制小车的前进、后退和转向动作。
5.通信功能:可通过串口通信模块与上位机进行通信,实现与外部设备的数据传输和控制。
三、工作流程1.初始化系统:对STM32单片机进行初始化配置。
2.读取传感器:通过ADC模块读取感光电阻传感器的电阻值。
3.循迹控制:根据读取的电阻值判断小车相对于轨迹的位置,控制小车行驶方向。
4.电机控制:根据循迹控制的结果,通过电机驱动模块控制小车的前进、后退和转向动作。
5.通信功能:可通过串口通信模块与上位机进行通信。
6.循环运行:不断重复上述步骤,实现小车的自主循迹行驶。
四、应用领域智能循迹小车的设计可以广泛应用于各个领域。
例如,在物流行业中,智能循迹小车可以实现自动化的物品搬运和运输;在工业领域,智能循迹小车可以替代人工,进行自动化生产和组装;在家庭生活中,智能循迹小车可以作为智能家居的一部分,实现家庭清洁和智能控制等功能。
基于树莓派的无线遥控移动机器人设计及运动控制
基于树莓派的无线遥控移动机器人设计及运动控制作者:杨丛丛吴涛张安峰江山强来源:《软件》2020年第02期摘 ;要:本文设计并开发了一种基于树莓派的无线遥控移动机器人,机器人使用手机作为控制端,控制系统以树莓派作为核心控制器,采用Python语言进行程序开发,机器人拥有小车底盘、电机驱动、机械臂、舵机驱动和超声波测距等多个功能模块。
系统通过Wi-Fi实现了机器人与手机之间的信息交互,操作者可以无线远程遥控来实现机器人的移动、避障和物体抓取。
关键词:;树莓派;机械臂;电机驱动;超声波测距;舵机驱动中图分类号: TP242.6;;;;文献标识码:;A;;;;DOI:10.3969/j.issn.1003-6970.2020.02.021【Abstract】: This paper designs and develops a wireless remote control mobile robot based on Raspberry Pi. The robot uses the mobile phone as the control terminal. The control system uses the Raspberry Pi as the core controller. The program is developed in Python language. The robot is composed of several functional modules such as car chassis, motor drive, manipulator, steering gear drive and ultrasonic ranging. the system realizes the information interaction between the robot and the mobile phone through Wi-Fi, and the operator can wirelessly remotely control the robot to move, avoid obstacles and grasp objects.【Key words】: Raspberry Pi; Robotic arm; Motor-drive; Ultrasonic ranging; Servo-drive0;;引言隨着计算机科学与网络技术的不断创新,为智能机器人技术的发展带来了新的发展机遇,各种机器人在不同的领域发挥着越来越重要的作用[1]。
机器人设计方案

机器人设计方案1. 简介机器人设计方案是指一个机器人的设计和开发计划,包括机器人的功能需求、硬件设计、软件设计和系统集成等方面。
本文档将详细介绍一个典型的机器人设计方案,旨在帮助开发团队理解和实施机器人项目。
2. 功能需求在进行机器人设计之前,首先需要明确机器人的功能需求。
根据项目的具体要求,可以确定机器人的基本功能和高级功能。
基本功能包括:•移动能力:机器人能够在不同的地面上移动,并具备足够的稳定性和机动性。
•感知能力:机器人能够感知环境中的物体、人和声音等信息。
•交互能力:机器人能够与人类进行语音和图像交互,并根据指令执行相应的动作。
•自主导航能力:机器人能够通过感知环境和地图信息,自主规划和执行路径,实现自主导航。
高级功能可以根据具体项目的需求进行扩展,例如人脸识别、语音识别、物体抓取等。
3. 硬件设计机器人的硬件设计是一个关键的环节,它包括机械结构设计、传感器选择和驱动电路设计等方面。
3.1 机械结构设计机器人的机械结构设计需要考虑机器人的外形尺寸、运动机构和载荷承载能力等因素。
根据机器人的功能需求,可以选择合适的机械结构,如轮式机器人、步态机器人、多足机器人等。
3.2 传感器选择机器人的感知能力依赖于选择合适的传感器。
常见的传感器包括:摄像头、声音传感器、红外线传感器、陀螺仪等。
根据项目需求,选用适当的传感器进行集成。
3.3 驱动电路设计机器人的驱动电路设计主要包括电机驱动、传感器接口和通信接口等。
根据具体的硬件配置,设计合适的驱动电路,确保机器人能够正常工作。
4. 软件设计机器人的软件设计是实现机器人功能的关键。
软件设计包括底层驱动程序的开发、感知和控制算法的实现以及上层应用的开发等。
4.1 驱动程序开发根据硬件设计的要求,开发相应的驱动程序,与硬件进行交互,控制机器人的运动和感知。
4.2 感知和控制算法机器人的感知和控制算法决定了机器人的行为和交互能力。
根据机器人的功能需求,开发相应的算法,如目标识别算法、路径规划算法等。
移动机器人技术方案(纯方案,8页)

DLRB-MR519-45移动机器人技术文件DLRB-MR519-45移动机器人(仅供参考)一、设备概述移动机器人是集环境感知、路径规划、动作控制等多功能于一体的综合系统,移动机器人项目是指运用机械设计与安装、传感技术、电子技术、控制技术、计算机工程、信息处理、人工智能等多学科理论知识和操作实践经验,围绕机器人的机械和控制系统进行工作的项目。
学生通过运用相关的理论知识和操作实践经验,围绕机器人的机械和控制系统进行工作,学生需要掌握的技能和要求主要包括:1)具备设计、生产、装配、组建、编程、管理和保养移动机器人的机械、电路、控制系统的能力,而且能够安装、调试并检测移动机器人。
2)根据制作需求,测试机器人的每个部件和整体性能,确保设计和制作的各个方面符合行业标准。
3)具有较好的信息收集和处理能力,能分析竞赛相关技术文件并简要陈述;具有较好的计划、组织和决策能力,能对新设备、新问题制定较为详细的时间安排并进行分析;具有较好的成果管理能力,能对学习的文档、调试的程序、竞赛过程进行分类总结并按一定规则保存。
二、移动机器人设备的组成:(图片仅供参考)移动机器人设备每套由上百种零件组成。
采用模块化设计,具备通用型接口,可以根据需求组成不同结构形式,能激发学生创新思维,同时能够满足技能竞赛要求。
学生通过使用这些配置设计、组装一台机器人,并且确保移动机器人能够在2*4米的比赛场地内移动,完成对项目的任务。
该设备主要包含以下组件:1)配置工业级的铝合金结构组件;2)配置NI myRIO控制器、NI LabView开发环境、LabView机器人模块以及NI VisionAssistant视觉助手;3)配置超过100个设计部件;4)配置基本传感器套件:相机、超声波测距传感器、9轴惯性磁性传感器、IR红外传感器、巡线传感器;12V 3000mAh的NiMH电池,12V的NiMH充电器;5)配置带编码器的直流电机;6)配置金属减速器。
机器人操作系统的设计和开发

机器人操作系统的设计和开发随着人工智能技术的不断进步和机器人应用的广泛发展,机器人操作系统成为了机器人领域的重要组成部分。
机器人操作系统简称ROS,它是一个开放源代码的、灵活、模块化的操作系统,为机器人研究和开发提供了强大的支持。
本文将介绍机器人操作系统的设计和开发。
一、机器人操作系统的概述机器人操作系统是一个软件平台,它为机器人提供了一系列底层的功能模块,包括硬件驱动、通信、姿态估计、运动控制等。
这些模块可以通过ROS的消息传递机制进行数据交换和协作,从而实现机器人的各种应用,包括自主导航、任务控制、视觉识别等。
ROS最初由斯坦福大学人工智能实验室于2007年推出,目前已经成为机器人领域最流行的操作系统之一。
ROS最大的优势在于它的开放性和灵活性,任何人都可以轻松地使用ROS搭建机器人系统,并且可以根据自己的需求添加相应的功能模块。
二、ROS的架构设计ROS的架构设计采用了分布式的模块化结构,可以方便地扩展和重用。
ROS系统由消息、话题、服务和动作四个核心概念组成。
(1)消息消息是ROS系统中传输数据的基本单位,是一种结构化的数据类型,可以是数字、布尔值、字符串等任何数据类型。
在ROS 中,消息分为标准消息和自定义消息两种类型。
标准消息是一些ROS预定义的通用消息格式,包括字符串、整数、浮点数等基本数据类型,同时还包括一些常用的数据类型,比如点云、激光雷达等。
自定义消息是用户自行定义的消息格式,可以根据具体应用需求自由地定义消息的结构和内容。
(2)话题话题是ROS消息传递的核心机制,和发布-订阅模型类似。
话题是一个消息通道,消息发布者将消息发送到话题上,而消息订阅者则可以从话题上接收到最新消息。
一个话题可以有多个订阅者,而发布者可以向多个话题发布消息。
话题是一种异步的通信机制,消息发布者和订阅者之间不存在任何同步关系。
话题还有一个重要的特性,即可以通过ROS参数服务器动态地修改话题的一些属性,如发布频率、消息队列长度等。
基于DSP的移动机器人驱动系统设计

感 器 接 口。 整 个 系统 结构 简单 、 靠 , 下 一 步 关 于移 动 机 器 人 轨 迹跟 踪 的 算 法研 究提 供 实验 支持 。 可 为
型 CP D来 扩 展 D P的 传 感 器 接 口 ,超 声 波 和 红 外 信 号 通 过 L S CP D 传 至 D P 提 供 机 器人 的位 置 信 息 。 L S ,
1 硬 件 设 计
D P输 出的左 ( 电机 的 P M、 和方 向信 号通 过 6 3 S 右) W 使能 N1 7 高 速 光 耦 后 , 后 面 的 模 拟 驱 动 信 号 很 好 地 隔 离 。 隔 离 后 , 号 和 信
基 于 D P的 移 动 机器 人驱 动 系统 设 计 S
基于 D P的移动机器人驱动系统设计 S
De i n o ie S se f r Mo l b t s d o DSP sg f Dr y t m o bi Ro o s Ba e n v e
孙 涛 师 五 喜 郭 利 进 郭 文 成 ( 天津工业大学电气工程与 自 动化学院, 天津 30 6 ) 0 10
图 1 系 统整 体 示 意 圈
获 单元 和 1个 正 交编 码 脉 冲单 元 。 另 有 1 6通 道 模 数 转换 模 块 、 串 行 外 设 接 口模 块 、 行 通 讯 接 口模 块 、 AN 控 制 器 模 块 和 4 串 C 0 个 可单 独 编 程 或 复 用 的通 用 lO。 /
关键 词 : 动机 器人 , 动 系统 , P 移 驱 DS
《2024年基于ROS的小场景移动机器人设计与实现》范文
《基于ROS的小场景移动机器人设计与实现》篇一一、引言随着科技的进步,机器人技术得到了广泛的应用和深入的研究。
其中,移动机器人在各种场景中发挥着越来越重要的作用。
本文将介绍一种基于ROS(Robot Operating System)的小场景移动机器人的设计与实现。
该机器人适用于特定的小范围环境,如家庭、工厂内部等,能够完成自主导航、避障、物品搬运等任务。
二、系统概述本系统采用ROS作为机器人开发的框架,结合传感器、电机驱动等硬件设备,实现机器人的运动控制和环境感知。
系统主要由以下几个部分组成:移动平台、传感器模块、控制模块和ROS 软件架构。
三、硬件设计1. 移动平台:采用差速驱动的移动平台,由两个电机驱动,通过编码器获取运动信息。
2. 传感器模块:包括激光雷达、红外传感器、摄像头等,用于实现机器人的环境感知和避障功能。
3. 控制模块:采用微控制器作为核心,负责接收传感器数据,并根据ROS的指令控制电机的运动。
四、软件设计1. ROS软件架构:采用ROS作为软件架构,实现机器人的运动控制和环境感知。
ROS提供了丰富的工具和库,方便开发人员快速搭建机器人系统。
2. 导航与定位:通过激光雷达和编码器数据,实现机器人的导航与定位功能。
采用SLAM(同时定位与地图构建)算法,实现机器人在未知环境中的自主导航。
3. 避障功能:通过红外传感器和摄像头等传感器数据,实现机器人的避障功能。
当机器人检测到障碍物时,会根据障碍物的距离和类型,采取相应的避障策略。
4. 任务执行:通过ROS的节点通信机制,实现机器人的任务执行功能。
开发人员可以根据需求,编写相应的ROS节点,实现机器人的各种任务。
五、实现过程1. 硬件组装:将移动平台、传感器模块和控制模块进行组装,搭建出机器人的硬件平台。
2. 软件开发:在ROS环境下,编写机器人的软件代码。
包括导航与定位、避障功能、任务执行等功能的实现。
3. 测试与调试:对机器人进行测试与调试,确保机器人能够正常工作。
《移动机器人原理与设计》第四章驱动

2、三相反應式步進電機原理
步進驅動原理 細分驅動技術
• 步進電機的基本參數
• 步距角:對應一個步進脈衝信號,步進電機轉過的角度。稱為固定步 距角。θ=360 /( J*m) • 步距角精度:步進電機每轉過一個步距角的實際值與理論值的誤差。 • 相數:是指電機內部的線圈組數 • 拍數:完成一個磁場週期性變化所需脈衝數或導電狀態,或指電機轉 過一個齒距角所需脈衝數 • 保持轉矩:是指步進電機通電但沒有轉動時,定子鎖住轉子的力矩 • 失步:步進電機運轉時運轉的步數,不等於理論上的步數,稱為失步 • 失調角:轉子齒軸線偏移定子齒軸線的角度 • 在某種測試條件下,電機運 行中輸出力矩與頻率關係的曲 線稱為運行矩頻特性
• 舵機的應答幀
• 舵機當前的工作狀態會通過位元組“ERROR”表示
• 指令
• 基本協議中定義了7條指令
• 記憶體控制表
• 記憶體控制表
• 記憶體控制表
• 記憶體控制表
• 部分記憶體控制表說明 • 0X04 保存串列傳輸速率計算參數。計算公式: Speed(BPS) = 2000000/(Address4+1)。 • 0x05: 設置返回延遲時間,即當舵機收到一條需要應答的指令後, 延遲應答的時間。 • 0x06~0x09: 設置舵機可運行的角度範圍。 順時針角度限制≤目標角度值≤逆時針角度限制值。
• 直流電機特性
機械特性
調節 特性
• 直流電機驅動電路 • 電晶體驅動電路
• 橋式電路
• 集成驅動 • L298系列 是一種二相和四相電機的專用驅動器, 內含二個H橋的雙全橋式驅動器
• MC33886
• • • • • 工作電壓:5-40V 導通電阻:120毫歐姆 輸入信號:TTL/CMOS PWM頻率:<= 10KHz 短路保護、欠壓保護、 過溫保護 • 具有錯誤狀態報告功能 (引腳/FS)
《基于ROS的机器人移动平台的设计与实现》范文
《基于ROS的机器人移动平台的设计与实现》篇一一、引言随着科技的不断发展,机器人技术已经逐渐渗透到各个领域,其中机器人移动平台作为机器人技术的重要组成部分,其设计和实现显得尤为重要。
本文将介绍基于ROS(Robot Operating System)的机器人移动平台的设计与实现,通过分析系统需求、设计思路、硬件构成、软件架构、实现方法及测试结果等方面,展示一个高效、稳定、可靠的机器人移动平台的实现过程。
二、系统需求分析在设计和实现机器人移动平台的过程中,首先需要进行系统需求分析。
本系统主要面向室内外环境下的移动机器人应用,需要满足以下需求:1. 自主导航:机器人能够根据环境信息自主规划路径,实现自主导航。
2. 稳定控制:机器人需要具备稳定的运动控制能力,以确保在复杂环境下能够安全、可靠地运行。
3. 兼容性强:系统需要具备良好的兼容性,能够与其他机器人模块(如传感器、执行器等)进行无缝集成。
4. 易于扩展:系统应具有良好的扩展性,方便后续功能的添加和升级。
三、设计思路基于上述需求分析,我们设计了一套基于ROS的机器人移动平台。
该平台采用模块化设计思想,将机器人分为运动控制模块、传感器模块、执行器模块等,各个模块之间通过ROS进行通信,实现信息的共享和协同。
同时,我们采用了先进的导航算法和运动控制策略,以确保机器人在各种环境下都能实现自主导航和稳定控制。
四、硬件构成机器人移动平台的硬件构成主要包括底盘、电机、轮子、传感器等。
底盘采用轻质材料制成,以降低机器人重量;电机和轮子负责驱动机器人运动;传感器则用于获取环境信息,为机器人的自主导航和稳定控制提供支持。
五、软件架构软件架构方面,我们采用了ROS作为机器人的操作系统,通过ROS提供的通信机制,实现各个模块之间的信息共享和协同。
同时,我们开发了相应的ROS节点,负责实现机器人的自主导航、运动控制等功能。
六、实现方法及测试结果通过《基于ROS的机器人移动平台的设计与实现》篇二一、引言近年来,随着科技的发展,机器人技术日益受到重视,其在各种应用场景下的功能性与便利性逐渐凸显。
基于ROS的开源移动机器人系统设计
基于ROS的开源移动机器人系统设计ROS(Robot Operating System)是一个开源的机器人操作系统,广泛应用于各种移动机器人平台。
在设计基于ROS的开源移动机器人系统时,需要考虑机器人的硬件平台、软件架构、传感器集成、控制与导航等方面。
一、硬件平台设计硬件平台是移动机器人系统的基础,需要根据具体需求选择适合的硬件组件。
常见的硬件组件包括电机、传感器(如激光雷达、摄像头、惯性测量单元等)、嵌入式控制板等。
硬件平台的设计需要考虑机器人的尺寸、载重、功耗等特性,同时要与ROS兼容。
二、软件架构设计在基于ROS的移动机器人系统中,软件架构设计起着关键作用。
可以采用分层架构,类似于ROS自身的设计。
常见的软件架构包括感知层、规划层、执行层等。
感知层负责获取机器人周围环境的信息,规划层负责生成机器人的路径规划,执行层负责执行路径规划控制机器人运动。
此外,还可以设计上层的用户界面和运维管理模块。
三、传感器集成设计移动机器人系统通常需要使用多种传感器,如激光雷达、摄像头、惯性测量单元等。
传感器集成设计需要考虑硬件的连接和通信协议,以及软件的驱动和数据处理。
在ROS中,可以使用ROS官方提供的传感器驱动包,也可以自行开发传感器驱动。
四、控制与导航设计控制与导航是移动机器人系统的核心功能。
在ROS中,可以使用导航栈(Navigation Stack)实现机器人的路径规划和导航。
路径规划可以使用ROS导航栈中提供的全局路径规划器(Global Planner)和局部路径规划器(Local Planner)来完成。
导航栈还提供了定位功能,可以使用SLAM(Simultaneous Localization and Mapping)算法实现机器人的自主定位。
五、模块和功能的扩展基于ROS的开源移动机器人系统非常灵活,可以根据具体需求扩展功能和添加模块。
可以使用ROS的Package和Node机制,将整个系统划分为多个独立的功能模块,每个模块运行在一个独立的Node中,通过ROS的消息机制进行通信。
移动机器人结构设计
移动机器人结构设计一、引言随着科技的快速发展,机器人技术不断取得新突破,其中,移动机器人的发展尤为引人注目。
移动机器人的应用场景广泛,包括但不限于服务型机器人、工业自动化、无人驾驶、智慧城市等领域。
结构设计是移动机器人设计的重要组成部分,其决定了机器人的运动性能、稳定性和耐用性。
本文将对移动机器人的结构设计进行深入探讨。
二、移动机器人的基本结构移动机器人通常由以下几部分组成:1、运动系统:包括轮子、履带、足等运动部件,用于实现机器人的移动。
2、控制系统:包括电机、驱动器、控制器等,用于驱动运动部件,控制机器人的运动轨迹和速度。
3、感知系统:包括摄像头、激光雷达、GPS等感知设备,用于获取周围环境信息,为机器人提供导航和定位数据。
4、计算系统:包括计算机主板、处理器、内存等,用于处理感知数据,做出决策,控制机器人的运动。
5、电源系统:包括电池、充电器等,为机器人的运行提供电力。
三、移动机器人的结构设计要点1、轻量化设计:为了提高机器人的移动性能和续航能力,需要尽量减轻机器人的重量。
因此,应选择轻质材料,优化结构设计,减少不必要的重量。
2、稳定性设计:机器人在移动过程中需要保持稳定,避免因摇晃或震动导致结构损坏或数据丢失。
因此,需要设计合适的支撑结构和防震措施。
3、耐用性设计:考虑到机器人的使用寿命和维修需求,结构设计应便于维护和更换部件。
同时,应考虑材料和部件的耐久性,确保机器人在恶劣环境下的正常运行。
4、适应性设计:由于应用场景的多样性,机器人的结构应具有较强的适应性。
例如,在复杂地形或狭小空间中,机器人需要具备爬坡、过坎、越障等能力;在无人驾驶领域,机器人需要具备快速反应和灵活避障的能力。
因此,结构设计应具有足够的灵活性和可扩展性,以满足不同场景的需求。
5、安全性设计:考虑到机器人与人或其他物体的交互,结构设计应确保安全性。
例如,应避免尖锐的边缘和突出的部件,以减少碰撞风险;在感知系统中加入安全预警机制,避免潜在的危险情况。
用于移动机器人的嵌入式系统设计与实现
用于移动机器人的嵌入式系统设计与实现移动机器人是现代自动化生产和服务领域中的重要组成部分,通过运用先进的嵌入式系统技术,可以为机器人的智能控制、信息处理和通讯传输提供强有力的支持,实现机器人的高效、精准和安全工作。
本文将针对移动机器人的嵌入式系统设计与实现进行探讨,主要从以下几个方面分析:一、移动机器人的嵌入式系统嵌入式系统是集成了计算、控制和通讯等多种功能的计算机系统,其特点是体积小、功耗低、性能高、稳定可靠,适合用于控制和监测等实时性强的场合。
移动机器人的嵌入式系统需要具备下列特点:1、高性能:支持多任务并行处理、高速计算和实时控制等功能,满足移动机器人的工作需求;2、低功耗:采用节能的硬件设计和优化的软件算法,确保嵌入式系统的长时间可靠运行;3、可靠稳定:采用防水、防震、防尘等物理保护措施,使用经过测试的软件和硬件组件,提高嵌入式系统的可靠性和稳定性;4、丰富接口:支持常见的通讯接口,如USB、RS232、以太网等,方便与其他设备进行数据交换和远程控制。
因此,移动机器人的嵌入式系统需要具备较高的计算速度、存储容量、通讯带宽和数据处理能力,同时考虑尺寸、重量和功耗等实际条件。
二、嵌入式系统硬件设计嵌入式系统的硬件设计是实现其高性能、低功耗和稳定可靠的关键步骤之一。
移动机器人的硬件设计需要考虑以下几点:1、选择适合的处理器:根据应用需求选择适合的嵌入式处理器,如ARM、Cortex-M等,并可以添加加速器、FPGA等外设扩展处理器的性能;2、核心电路设计:对处理器的供电电路、时钟电路和复位电路进行规划和布局,保证电源和信号的稳定和可靠;3、外设设计:根据需求添加各种外设,如USB、RS232、以太网、WIFI、蓝牙等,或者传感器、电机控制器、电源管理电路等;4、尺寸和布局:根据实际应用场景选择适当的尺寸和布局,考虑嵌入式系统的机械结构安装和接口导线布置等问题。
通过以上设计,可以实现移动机器人的嵌入式系统硬件上的优化。
新型移动并联机器人动力学分析与控制设计

新型移动并联机器人动力学分析与控制设计新型移动并联机器人动力学分析与控制设计一、引言近年来,机器人技术的发展取得了长足的进步,并被广泛应用于工业、医疗、军事等领域。
移动并联机器人因其具有高度机动性和灵活性的特点,成为研究的热点之一。
本文旨在对新型移动并联机器人的动力学进行分析与控制设计,以优化机器人的运动能力和工作效率。
二、新型移动并联机器人的基本结构新型移动并联机器人是指通过多个机械臂和轮式底盘结合而成的机器人系统。
其具有高度机动性,能够在不同地形环境下进行运动和工作。
新型移动并联机器人的基本结构包括机械臂部分和底盘部分。
机械臂部分是机器人的工作单位,负责完成各种任务。
通常由多个自由度的机械臂构成,每个机械臂上安装有各种工具和装置,以完成特定的工作。
机械臂的设计和动力学分析是新型移动并联机器人研究的重点之一。
底盘部分是机器人的移动单位,负责机器人的定位和导航。
底盘通常由多个封闭式回路构成,每个回路上配有一个轮子或履带,通过电机驱动实现运动。
底盘的设计和动力学分析对机器人的移动性能和稳定性至关重要。
三、新型移动并联机器人的动力学分析动力学分析是研究物体运动的一种方法,它借助于力学和数学工具,研究物体在外力作用下的运动规律。
对于新型移动并联机器人而言,动力学分析能够揭示机器人在不同工作状态下的力学特性,为机器人的运动控制提供关键参数。
1. 机械臂动力学分析机械臂的动力学分析是指研究机械臂在外力作用下的运动规律。
机械臂的运动可以分解为位置、速度和加速度三个方面。
通过分析机械臂各个关节的动力学特性,可以确定机械臂在特定工作状态下的力学性能。
动力学分析的结果可以用于机械臂的运动规划和控制。
2. 底盘动力学分析底盘的动力学分析是指研究底盘在外力作用下的移动规律。
底盘的移动可以分解为位置、速度和加速度三个方面。
通过分析底盘的运动特性和所受力的分布,可以确定底盘在不同地形环境和工作状态下的运动性能。
动力学分析的结果可以用于底盘的运动控制和路径规划。
agv开发方案

agv开发方案概述:AGV(自动导引车)是一种能够自主移动和操控货物的无人驾驶机器人,广泛应用于物流、仓储、制造等领域。
本文将介绍一个完整的AGV开发方案,包括硬件设备、软件系统和应用场景等方面内容。
一、硬件设备:为实现AGV的自主移动功能,需要具备以下硬件设备:1. 底盘:AGV底盘是AGV机器人的运载平台,通常采用高强度铝合金材料制成,具有较强的载重能力和稳定性。
2. 导航系统:AGV导航系统是AGV机器人的重要组成部分,常用的导航方式包括激光导航、视觉导航和磁导航等。
开发方案需根据实际场景选择合适的导航方式。
3. 传感器:AGV机器人需要通过传感器感知周围环境,一般包括激光雷达、红外传感器、超声波传感器等,用于辨识障碍物、测量距离等。
4. 控制系统:AGV机器人的控制系统通常由嵌入式控制器、电机驱动器等组成,用于实现机器人的自主导航、路径规划等功能。
5. 电池组:为了实现AGV机器人的长时间工作,需要配置高容量的电池组,同时考虑充电和更换电池的便捷性。
二、软件系统:AGV机器人的软件系统起着关键的作用,它实现了机器人的自主导航、路径规划、任务调度等功能,以下为AGV开发方案的软件系统要点:1. 导航与定位:通过导航算法和传感器数据融合,实现AGV的准确定位和路径规划功能。
可采用SLAM(同步定位与地图构建)技术,结合地图数据和激光雷达测距数据实现精准导航。
2. 路径规划:根据任务需求和环境条件,采用合适的路径规划算法(如A*算法、Dijkstra算法等),生成最优路径并考虑动态避障。
3. 通信与调度:通过无线通信技术,实现AGV机器人与上位系统的数据交互和任务调度,可以采用Wi-Fi、蓝牙等通信方式。
4. 人机界面:开发用户友好的人机交互界面,提供实时监控、任务设定等功能,方便用户对AGV机器人进行控制和管理。
三、应用场景:AGV机器人具有广泛的应用场景,以下为几个示例:1. 物流仓储:AGV可用于仓库内货物的搬运、堆垛、分拣等工作,提高了物流效率和准确性。
轮式移动机器人系统设计与控制分析

大连理工大学硕士学位论文目录摘要………………………………………………………………………………………………………………IAbstract…………….……….....….……….…..….….….………………….......……………………….………II1绪论……………………………………………………………………………………l1.1课题研究的背景及意义………………………………………………………11.2移动机器人的发展历史及趋势………………………………………………l1.2.1国内外移动机器人的发展历史………………………………………11.2.2移动机器人的新发展与发展趋势……………………………………31.3本文主要研究内容………‰…………………………………………………32移动机器人的体系结构设计…………………………………………………………52.1移动机器人的机械结构设计和运动学模型建立……………………………52.1.1移动机器人的机械结构………………………………………………52.1.2移动机器人的运动学模型……………………………………………52.2移动机器人的控制系统设计…………………………………………………72.2.1主控制器模块…………………………………………………………72.2.2驱动模块………………………………………………………………92.2.3PLC模块……………………………………………………………..122.2.4相机姿态调整模块…………………………………………………..192.2.5测距模块……………………………………………………………一202.2.6通信模块……………………………………………………………一222.2.7电源模块………………………………………………………………253Back—Stepping算法在移动机器人轨迹跟踪中的研究……………………………263.1移动机器人路径规划与轨迹跟踪………………………………………….263.1.1路径规划………………………………………………………………263.1.2轨迹跟踪………………………………………………………………273.2Back—Stepping算法…………………………………………………………273.2.1基于Lyapunov稳定性的最优状态反馈控制器…………………….283.2.2Back—Stepping算法的设计思想……………………………………..293.3Back—Stepping算法在基于运动学模型的轨迹跟踪中的实现……………3l3.4实验结果及分析…………………………………………………………….343.5本章小结…………………………………………………………………….364连续曲率曲线路径在局部路径规划中的研究……………………………………..37轮式移动机器人系统设计及控制研究4.1局部路径规划中的连续曲率曲线的建立………………………………….374.1.1直角坐标系中连续曲率曲线的建立方法……………………………374.1.2连续曲率曲线算法在移动机器人局部路径规划中的实现…………414.2实验结果及分析…………………………………………………………….434.3本章小结…………………………………………………………………….455基于模糊控制算法的移动机器人直线轨迹跟踪………………………………….465.1模糊控制理论……………………………………………………………….465.1.1模糊控制的概念……………………………………………………一465.1.2模糊控制的优点……………………………………………………一465.2模糊控制系统……………………………………………………………….475.2.1模糊控制系统的组成………………………………………………..475.2.2模糊控制器的设计…………………………………………………..485.3模糊控制算法在移动机器人轨迹跟踪中的实现………………………….495.3.1输入输出量模糊语言及其隶属度的建立…………………………一505.3.2模糊控制规则的设定………………………………………………。
基于Arduino的移动机器人控制系统设计
电子技术• Electronic Technology106 •电子技术与软件工程 Electronic Technology & Software Engineering【关键词】移动机器人 Arduino 自动避障本文主要通过对系统的结构设计的介绍,阐述了系统的工作原理和模块功能,同时对它的硬件设计与软件设计进行了分析,最后通过使用过程中出现的情况对系统进行了调试,希望本文能够对该系统的发展作出贡献。
1 Arduino简介Arduino 是一个基于开放原始码的软硬件平台,构建于开放原始码simple I/O 介面版,并且具有使用类似Java 、C 语言的Processing/Wiring 开发环境。
Arduino 包含两个主要的部分:硬件部分是可以用来做电路连接的Arduino 电路板;另外一个则是Arduino IDE ,你的计算机中的程序开发环境。
你只要在IDE 中编写程序代码,将程序上传到Arduino 电路板后,程序便会告诉Arduino 电路板要做些什么了。
Arduino 能通过各种各样的传感器来感知环境,通过控制灯光、马达和其他的装置来反馈、影响环境。
2 系统的现状分析随着计算机技术的发展,传感技术以及通信技术等都得到了迅猛的发展,机器人也在各行各业中得到了普遍的使用。
家用机器人是机器人使用的一种方式,它的控制系统一般有语音控制、红外线遥控,电脑遥控,网络控制等等,这些方式都促进了机器人在家庭生活中的使用,但是也存在着携带不方便的情况,而且机器人的移动性能相对来讲也比较受限制,对他的控制需要严重依赖网络,造成极大的不方便。
针对上述情况,我们对这一控制系统采取了Arduino+Android 的方案进行进一步的改进,利用Arduino 的传感器对家庭环境进行监控,而且该系统的成本相对来讲比较低,操作上也相对来讲比较灵活,能够对机器人进行目标的锁定和规避障碍物,具有自动寻线、寻光的功能。
《2024年基于ROS的小场景移动机器人设计与实现》范文
《基于ROS的小场景移动机器人设计与实现》篇一一、引言随着科技的不断发展,机器人技术已经逐渐渗透到我们生活的各个角落。
其中,小场景移动机器人因其灵活性和实用性,在物流、家庭服务、医疗等多个领域有着广泛的应用前景。
本文将详细介绍基于ROS(Robot Operating System)的小场景移动机器人的设计与实现过程。
二、系统需求分析1. 功能需求小场景移动机器人需具备基本的运动功能,如前进、后退、左转、右转等。
同时,为满足实际需求,还需具备自动导航、避障、载物等功能。
2. 性能需求机器人需具备较高的运动稳定性和灵活性,以适应不同的小场景环境。
此外,还需具备良好的续航能力和负载能力。
3. 硬件需求硬件部分主要包括移动底盘、传感器(如摄像头、雷达等)、控制器等。
其中,移动底盘需具备较好的承载能力和运动性能。
三、系统设计1. 整体架构设计基于ROS的移动机器人系统架构主要包括硬件层、驱动层、ROS中间层和应用层。
其中,硬件层负责与机器人硬件设备进行交互;驱动层负责驱动硬件设备的运行;ROS中间层负责实现机器人各种功能的算法;应用层则负责实现具体的应用功能。
2. 运动控制系统设计运动控制系统是机器人的核心部分,主要包括控制器和执行器。
控制器通过接收传感器数据和指令,控制执行器实现机器人的各种运动。
3. 导航与避障系统设计导航与避障系统是机器人实现自动导航和避障功能的关键。
通过传感器数据和地图信息,机器人可实现自主导航和避障。
四、系统实现1. 硬件选型与搭建根据需求分析,选择合适的移动底盘、传感器、控制器等硬件设备,并进行搭建。
其中,移动底盘需具备较好的承载能力和运动性能;传感器需具备较高的精度和稳定性;控制器需具备较好的计算能力和实时性。
2. ROS软件开发环境搭建搭建ROS软件开发环境,包括安装ROS操作系统、配置开发工具等。
同时,根据需求安装相应的ROS包和驱动程序。
3. 运动控制实现通过编写ROS节点和算法,实现机器人的各种运动控制功能。
扫地机器人硬件与软件设计

扫地机器人硬件与软件设计一、本文概述随着科技的快速发展和的广泛应用,扫地机器人作为智能家居的重要组成部分,已经逐渐进入千家万户。
本文旨在深入探讨扫地机器人的硬件与软件设计,以期为读者提供全面、深入的了解,并推动扫地机器人技术的进一步创新与发展。
本文将首先介绍扫地机器人的基本概念和分类,然后分别阐述其硬件和软件设计的基本原理和实现方法,包括传感器技术、控制算法、路径规划、导航技术、电池管理等方面。
本文还将讨论扫地机器人设计中的关键问题和挑战,如续航能力、清扫效率、智能避障等,并探讨未来的发展趋势和潜在应用场景。
通过本文的阅读,读者将能够全面了解扫地机器人的硬件与软件设计,为未来的研究和开发提供有益的参考和启示。
二、扫地机器人硬件设计扫地机器人硬件设计是打造高效清洁机器人的关键所在。
一个优秀的扫地机器人需要具备出色的导航能力、强大的清洁能力、稳定的电源供应以及优秀的硬件结构。
导航系统是扫地机器人的“眼睛”。
大多数现代扫地机器人采用激光雷达或视觉传感器进行导航。
激光雷达通过发射激光束并接收反射回来的信号,生成环境的精确地图,进而规划清扫路径。
而视觉传感器则通过摄像头捕捉环境图像,利用图像处理和计算机视觉算法进行导航和定位。
清洁能力是扫地机器人的核心。
扫地机器人的清洁系统通常包括吸尘器和拖地装置。
吸尘器负责吸取灰尘和颗粒物,而拖地装置则用于擦拭地面。
为了增强清洁效果,一些高端扫地机器人还配备了自动升降的拖布和智能调节的吸力。
电源供应是扫地机器人的“动力源泉”。
扫地机器人通常采用可充电电池作为电源,如锂离子电池。
为了延长使用时间,一些扫地机器人还配备了节能模式和自动回充功能。
硬件结构是扫地机器人的“骨架”。
优秀的硬件结构应保证扫地机器人的稳定性和耐用性。
扫地机器人通常采用圆润的外形设计,以减少碰撞和损坏。
内部结构也需要进行精心的设计和优化,以确保各个部件之间的协同工作。
扫地机器人硬件设计涉及到导航、清洁、电源和硬件结构等多个方面。
简析自动避障小车的硬件设计
简析自动避障小车的硬件设计避障小车是一种采用了红外、超声波、CCD和激光等传感器设计的移动机器人。
其工作原理是:避障小车在复杂环境自主移动时,通过传感器系统感知外界环境从而完成避障。
避障控制系统的总体设计思路是基于自动引导小车系统,这种系统使用传感器感知路线和障碍,根据智能小车实现自动识别路线,在遇到障碍时自动避让,并且选择正确的路线行进。
1 设计任务1.1 设计思想本系统要求自行设计制作一个智能小车,该小车在前进的过程中能够检测到前方障碍并自动避开,达到避障的效果。
设计思想是采用单片机为控制核心,利用位置传感器检测道路上的障碍,通过采集数据并处理后由单片机产生PWM波驱动直流电机对车进行转向和行动控制,控制电动小汽车的自动避障、快慢速行驶以及自动停车。
1.2 功能概述本系统主要由微控制器模块、避障模块、直流电机及其驱动模块电源模块等构成。
微控制器模块:通过采用STC89C52作为微控制器接受传感器部分收集到的外部信息进行处理,并将结果输出到电机驱动模块控制电机运行。
避障模块:采用位置传感器的漫反射检测来检测前方是否有障碍,通过红外光电开关将采集到的信号送到微控制器。
驱动模块:通过接收微控制器产生的信号来驱动电机运行,实现快慢速行驶,转向控制以及自动停车。
电源模块:为保证正常工作,为整个电路模块提供电源支持。
2 硬件电路设计关键元件选择讨论:2.1 单片机的选择单片机全称单片微型计算机(Single Chip Microcomputer),简称SCM,把一个计算机系统集成到一个芯片上,具有质量轻、体积小、价格便宜的特点。
单片机内部也有着内存、CPU、类似硬盘一样具有存储功能的器件等与电脑功能类似的模块。
单片机的核心是集成电路芯片,该芯片采用了规模超大的集成电路技术,将各种模块集成在一起,包括对数据进行处理的中央处理器CPU、模拟多路转换器、显示驱动电路、中断系统、数据存储器RAM、程序存储器ROM、定时器/计时器、A/D转换器等,这些功能模块被集成在硅片上,形成了一个小型的、完善的计算机系统。
简易机器人设计方案

简易机器人设计方案在下面是我为您准备的简易机器人设计方案:简易机器人设计方案1. 引言机器人技术的发展已经深入到了我们的生活中,从工业制造到个人助手,机器人在许多领域都发挥着重要的角色。
本文提出了一种简易机器人的设计方案,旨在为用户提供基本的功能和娱乐体验。
2. 设计目标简易机器人的设计目标是为用户提供以下功能:- 基本的语音交互功能,能够识别和理解用户的指令;- 执行简单的动作,如移动、拾取物品等;- 提供基本的娱乐功能,如播放音乐、讲故事等。
3. 硬件设计为了实现上述的功能,简易机器人的硬件设计包括以下部分:- 主控制板:用于控制机器人的整体运行,处理语音指令和动作执行;- 语音识别模块:通过麦克风接收用户的语音指令,并将其转化为文字信息;- 传感器:用于感知环境和障碍物,确保机器人移动的安全;- 电机和驱动器:控制机器人的移动和机械动作;- 扬声器:用于播放音乐和讲故事等娱乐功能。
4. 软件设计简易机器人的软件设计主要包括以下方面:- 语音识别算法:将语音信号转化为文字信息,通过自然语言处理技术理解用户的指令;- 动作控制算法:根据接收到的指令,控制机器人的电机和驱动器执行相应的动作;- 娱乐功能:通过预先存储的音乐和故事等资源,提供基本的娱乐体验;- 用户界面:通过屏幕或按钮等方式,与用户进行交互。
5. 功能实现简易机器人的功能实现如下:- 语音交互:用户通过语音指令向机器人发出指令,如“机器人,向前走”;- 动作执行:机器人接收到指令后,根据程序控制电机和驱动器进行相应动作,如向前移动;- 娱乐功能:用户可以通过语音指令让机器人播放音乐或讲故事,如“机器人,播放一首歌”;- 环境感知:机器人通过传感器感知周围的环境和障碍物,避免碰撞或掉落。
6. 应用场景简易机器人可以在以下场景中发挥作用:- 家庭助手:机器人可以帮助搬运物品、打扫卫生等日常家务;- 儿童陪伴:机器人可以陪同儿童玩耍、讲故事,提供基本的教育功能;- 娱乐活动:机器人可以在聚会或娱乐场所中提供音乐播放和互动娱乐。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1(20&’()* ,-./0&’()* 1(20)’()* ,-./0)’()*
以常速移动指定距离 # 图 !5P #-$$ 以梯形速度移动指定距离 # 图 !5P #8$$ 以指定的常速连续运动 # 图 !5P#1 $$ 加速后保持在指定高速的连续运动 # 图 !5P #: $$
!"!"$ 驱动控制设计
$
参考文献 ! !"# $%% 程序设计与实例 刘天海等编著 测绘出版社 "&&’(") !)# 机器人控制基础 吴芳美主编 中国铁道出版社 "&&)(*
.*/08(-9:08-.*;"<3+"= A2A/08(-9:;=> .*/01(2.&**: ;+6#%%=> .*/01(2.&**: ;!6#%%=> 1(20)’()*!;+6+6!65+=> ?@ 1(20)’()*!;+6+6!6+ B*/1C-9;=> .D::*20./(&!;$6!=> >?@ 设置控制板的基地址 %<3+%@? ?@ 初始化控制器的硬件和软件 @? ?@ 设置 + 轴以每秒 #%% 个脉冲常速运动 @? ?@ 设置 ! 轴以每秒 #%% 个脉冲常速运动 @? ?@ 设定 + 轴正转 !! 轴反转并以常速连续运动 @? =若设定双轴正转 ! 则可实现车身原地转动 @? ?@ 按任意键双轴停止运动 @?
!""#年第 $% 期
!"! 移动机器人驱动控制功能的分析与设计
福
建
电
脑
+*,
移动机器人驱动控制功能是通过控制步进电机的两轴运动 模式实现的 ! 步进电机的驱动分为单轴驱动和双轴驱动两种 " !"!"# 单轴驱动控制模块 单轴驱动控制有以下两种基本的运动类型 # 如图 # 所示 $% ! 点位运动 #&’()*$ " 连续运动 #)’()* $ 这些运动又可以在常速模式或梯形速度模式下工作 ! 因此 ! 总共有六种基本运动类型 ! 如表 + 所示 %
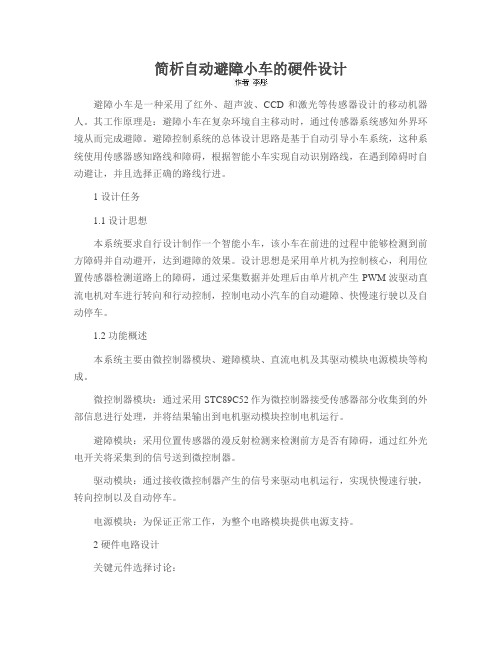
!
图 / 移动机器人硬件系统结构图 步进电机驱动控制模块 步进电机驱动控制模块主要由步进电机控制部分及步时电 机驱动部分组成 " 其中步进电机控制部分由 01.’%% 运动控制 卡负责 # 步进电机驱动部分由步进电机驱动器 2,3% 负责 " $#! %&’!() 运动控制卡 01.$%% 运 动 控 制 卡 是 基 于 456 总 线 上 的 步 进 电 机 控 制 卡 #可 以 提 供 ’ 至 / 个 步 进 电 机 的 高 性 能 控 制 #如 单 轴 运 动 控 制 ! 多轴独立运动控制 ! 多轴插补运动控制和传动机构间隙补偿 等 " 卡上 .-7 与主控 -. 机 .-7 构成主从控制双 .-7 系统 " 所 有运动控制的细节都可由该卡处理 # 譬如电机升降速计算 # 脉冲 发射和行程开关控制等 " 01. ’"" 控 制 卡 具 有 开 放 式 结 构 ! 使 用 简 便 ! 功 能 丰 富 ! 可 靠性高等特征 " 01.’"" 的接线方式采用 0 型插头 # 可使用屏蔽 线 缆 #并 且 所 有 的 输 入 !输 出 信 号 均 用 光 电 隔 离 #提 高 了 控 制 卡 的 可 靠 性 和 抗 干 扰 能 力 ’01.’"" 在 软 件 方 面 提 供 了 丰 富 的 运 动控制函数库 # 以满足不同的应用要求 " 根据控制系统的要求编 制人机界面 # 并调用 01.’"" 运动函数库中的指令函数 # 可以开 发出既满足要求又成本低廉的多轴运动控制系统 " $#" 步进电机驱动器 *+,) 2,3" 是 一 款 高 性 能 步 进 驱 动 器 # 适 合 驱 动 中 等 功 率 ! 力 矩 为 ’8$# 牛米的任何两相或四相混合式步进电机 # 由于采用新型 的双极性恒流斩波驱动技术 # 使用同样的电机可以比其它驱动 方式输出更高的速度和功率 " 2,3% 以 双 极 恒 流 斩 波 方 式 工 作 # 斩 波 频 率 !%92: # 采 用 光 隔 离 信 号 输 入 # 供 电 电 压 可 达 0.,"; # 最 大 驱 动 电 流 36< 相 # 输 入电信号为 ==> 兼容信号 # 具有低速减振功能 # 可驱动任何两相 或四相步进电机 #? 线 !3 线 !, 线电机均可 " 完整的步进电机控制系统应含有步进电机 & 步进电机驱动 器 & 直 流 电 源 以 及 01.’"" 运 动 控 制 卡 ( 脉 冲 源 @A 其 连 接 方 式 如 图 ? 所示 &
$
图 ’ 移动机器人车体结构 图 ! 移动机器人车体层次结构 "#" 移动机器人硬件驱动系统结构 移动机器 人 硬 件 驱 动 系 统 主 要 由 主 控 !" 机 ! 步 进 电 机 驱 动控制模块及步进 电 机 组 成 " 主 控 !" 机 接 收 来 自 无 线 局 域 网 的机器人服务器发 出 的 控 制 指 令 # 经 -. 机 解 释 后 向 控 制 移 动 机器人发送运动控制指令 # 以控制移动机器人的运行方式 " 步进 电 机 驱 动 控 制 模 块 根 据 主 控 !" 的 指 令 对 机 器 人 进 行 启 动 ! 停 止 ! 前进 ! 后退及左右转向的操作 " 移动机器人驱动控制系统硬 件结构如图 / 所示 & 图 ? 2,3% 驱动器与 01.’%% 运动控制卡连接图
步进电机的正转驱动用 + 表示 ! 反转则 用 5+ 表 示 & 由 于 两 步进电机的安装方向正好相反 ! 因此在控制车轴直线前行时 ! 一 个步进电机应正转 ! 另一个步时电机则应反转 & 如果两个步进电 机均为正转或反转 ! 由于车身为圆柱型设计 ! 因此可实现车身的 原地转动运动 & 下面是一个双轴驱动直线常速运动的实例 6 代码 为 7 语言 %
&’(
福
建
电
脑
!""#年第 $% 期
移动机器人硬件驱动方案的设计
黄 晞 严 闪
! 福建师范大学物理与光电信息科技学院 " 福建 福州 !"###$ #
! 摘 要 " 本文介绍了一种移动机器人硬件驱动系统的设计方案 % 对移动机器人硬件 驱 动 系 统 的 体 系 结 构 进 行 了 分析 " 并设计和实现了硬件驱动系统的功能 $ ! 关键词 " 移动机器人 " 驱动控制 " 无线局域网 引言 基于互联网的远程可控制机器人是当前机器人研究的前沿 和热点 & 它对 于 危 险 环 境 下 的 远 程 作 业 及 远 程 医 疗 ! 远 程 教 育 ! 远程制造等技术具有深刻的现实意义 " 移动机器人硬件驱动系统是远程机器人控制系统的底层平 台 # 是上层网络远程控制子系统的基础 " 作为机器人技术的一个 重要组成部分 # 机器人的驱动控制对于扩大机器人的活动范围 # 适应不同的环境具有极其重要的意义 " 在本项目中 # 采用自行设计和研制的移动机器人实验平台 作为开展移动机器人方面研究 $ 如路径规划 ! 基于网络的机器人 控制等 % 的实验平台 " 在设计过程中 # 采用模块化结构 # 各个模块 都是相对独立地开发和运行 ! 统一接口 # 使该系统能够根据实际 需要自主地升级 ! 扩展其性能 " 本文主要论述了该结构及其各个 组成模块的功能及实现方法 " " 移动机器人硬件系统总体框架设计 "#! 移动机器人车体结构 图 ’ 为移动机器人的车体结构 # 其尺寸如图所示 ( 单位 ) 毫 米 * # 车体为圆形结构 # 驱动轮位于车体的水平轴线上 # 每 一 个 驱 动轮分别由一台步进电机独立驱动 " 两从动轮位于车体垂直轴 线上 # 仅起支撑车体的作用 " 通过控制两驱动的同时正向转动可 实现车体向前直行 ! 同时反向转动可实现车体后退直行 ! 以不同 转速转动可实现车体的左转或右转 " 驱动轮采用此种结构的最 大特点类似于履带式车辆 # 即通过控制一个驱动轮正转 # 另一个 反转可实现车体原地转向 " 由于车身呈圆柱形 # 因此当车身遇到 死角时 # 通过原地转向可轻易实现退出死角的操作 " 移动机器人车体呈四层结构如图 ! 所示 # 从下到上各层分 布情况依次为 ) 最底层为运动控制模块 # 主要由 步 进 电 机 及 其 驱 动模块和系统电源蓄电池组成 + 第二层为车载主 控 计 算 机 系 统 # 这是整个移动机器人系统的核心部分 ) 第三 层 为 , 路 超 声 波 传 感器层 + 最上层是机器人视觉处理模块 # 主要由 摄 像 头 及 其 附 件 组成 "
表 + 单轴驱动控制类型
图 # 单轴驱动模式 带有升 ! 降速控制的驱动函数称之为快速 #,-./ $ 函数 ! 譬 如 % ,-./0&’()* !,-./0)’()*! 而 常 速 驱 动 函 数 则 称 之 为 1(2 驱 动 ! 如 1(20&’()* !1(20)’()*& 3434! 双轴独立驱动控制 双轴驱动是在单轴驱动模式的基础上 ! 两个运动轴能以独 立的形式进行点位运动和连续运动 & 这类驱动一般在函数名的 末尾以 ! 来指明参加运动的轴数 & 例如 1(20&’()*! 是一个双轴 同 时 独 立 做 点 位 运 动 的 函 数 !,-./0)’()*! 是 双 轴 独 立 常 速 连 续 运动的函数 & !"!"! 驱动控制流程