微小信号采集电路的设计与研究
微弱信号检测处理技术研究
微弱信号检测处理技术研究随着科技的不断发展,微弱信号检测处理技术已经成为了现代科技领域中不可或缺的一部分。
在各个领域中,微弱信号都起着非常重要的作用,比如在生命科学中,微弱信号能够帮助人类早期发现并治疗疾病,在通信领域,微弱信号能够帮助我们更好地传递信息,提高信息传输的质量和速度。
因此,研究微弱信号检测处理技术也就变得尤为重要。
一、微弱信号检测处理技术的作用微弱信号检测处理技术在不同领域有着不同的应用。
在医学领域,微弱信号检测处理技术主要应用于生命信号的检测处理,比如心电信号、脑电信号等。
通过对生命信号进行检测处理,可以帮助医生及时发现和诊断疾病,进行治疗和干预。
在通信领域中,微弱信号检测处理技术则主要用于提高信息传输质量。
由于信号在传输过程中会受到各种干扰,导致信号衰减甚至丢失。
而微弱信号检测处理技术能够通过各种方法将微弱信号进行放大、滤波、降噪等处理,从而提高信号的质量和稳定性。
在工业制造和环境监测领域中,微弱信号检测处理技术则主要用于检测并分析一些微小变化。
比如在工业生产过程中,微弱信号检测处理技术可以检测出机器的微小振动、温度变化等,帮助企业有效控制生产过程中的各种参数,从而提高生产效率和节约成本。
二、微弱信号检测处理技术的主要方法微弱信号检测处理技术的主要方法包括信号放大、信号滤波和信号降噪等。
下面对这些方法进行简单的介绍。
1. 信号放大信号放大是一种主要的微弱信号检测处理方法。
与常规信号放大不同的是,微弱信号放大过程中需要考虑到放大倍数、电路的噪声等因素。
因此,在放大信号时,需要进行合适的电路设计和分析,使用合适的放大器、传感器等设备。
2. 信号滤波信号滤波是通过滤波器来减少或消除信号中的噪声,从而提高信号的质量。
滤波器的种类繁多,包括低通滤波器、高通滤波器、带通滤波器、陷波滤波器等。
在使用滤波器时,需要根据信号的实际情况选择合适的滤波器种类和相关参数,以达到最佳效果。
3. 信号降噪信号降噪是降低信号噪声水平的一种方法。
提取微弱小信号的锁相放大器试制提交文档

图 3 功能框图
上位机软件采用 LabVIEW 进行编写与处理数据。锁相放大的原理可以用 LabVIEW 进行仿真,其上位机软件可以用 LabVIEW 进行编写。如下图为 LabVIEW 仿真原理
图4
LabVIEW 仿真原理图
第四节
原题图和 PCB 以及 ADI 芯片演绎
完整原理图、PCB 布局、元器件清单以及程序请见论坛帖子附件,全部免费 下载。 第二、三节已经介绍锁相放大器原理了和仿真了。下面就是按照以上原理来 设计的。设计之中采用分模块设计。这样便于分析检查和排错。设计模拟锁相放 大器需模拟电路的功底较好。 4.1 整体模块原理图
第三节
方案设计
为实现低成本小体积的模拟式锁相放大器,来采集太赫兹时域光谱仪中的差 分探头产生的 THz 信号。通过核心器件 AD630(平衡调制解调器)做锁相放大, 以提取被噪声淹没的微弱 THz 信号,要求其动态范围宽,达到 100db 以上,能检 测 100pA 以上的信号。最终采集的信噪比需满足 60db 以上。电路的设计上均考 虑低噪声因素。 其实施方案如下:
R nf( ) E{[ni(t )][x i(t ) ni(t )]} R nx( ) R n( )
xi(t)与 ni(t)相互独立,则互不相关,因而为零。频率相同的信号相关度高,噪声 的相关性趋于 0。这是互相关检测的原理。
图 2 开关型相敏检测器(构成框图) AD630 内部即有此部分
4.4.2 锁相放大器输出信号
4.5 低通电路模块
本模块采用的低通滤波器为普通的四阶贝塞尔低通滤波器。低通滤波器选择 的运放为 OP2177,仿真亦用 ADI 版本的 Multisim,
如图为仿真结果。
最后测试低通滤波器输出,低通滤波器能将交流信号转为直流信号,幅度 约为-270mV。与信号源输出的幅值有一定的比例,这个需要计算。电路输出的纹 波噪声以及其他的噪声貌似有些大。可能由于低通滤波和 AD7190 的布局没搭配 好,以及滤波电容选的还有些小。这个原因还要继续查找。 4.6 ADC 转换模块 低通滤波完了, 出来的信号就要经过 AD 转换来实现。 本设计采用 24bit ADC, 型号 AD7190 芯片。此款芯片最高采样率 4.8KHz,对于小信号放大来说足够了, 特别是其低噪声,可编程放大模块,这个比较吸引人。其接口为 SPI 接口,但个 人认为貌似不是标准的 SPI 接口,DOUT/RDY,这个时序比较不爽。参考有网友编 写的 AD7190 程序,都是通过 MCU 软件模拟时序写的接口程序,没有一个用硬件 接口。于是自己用 MSP430 的 SPI1 口,在中秋节三天时间,研究 AD7190 文档和 MSP430 编写出硬件 SPI 接口程序,不过到现在还没来得及实际测试。芯片编译 通过没有错误。 论坛的附件会免费共享出代码。 不过等有时间在测试一下 AD7190 了。
多信号采集功能信号电路设计

多信号采集功能信号电路设计信号调理电路设计中,软件和硬件设计是两个关键部分,本文主要从软件设计和硬件设计两大方面探讨多信号采集功能信号电路设计。
《电路与系统学报》(双月刊)是经过中国国家科委审定的高级学术刊物,由中国电子学会电路与系统专业学会支持,1996年创刊,在国内外公开发行。
本刊主要刊登电路与系统学科内具有重要理论与技术意义的、创新的和高水平的学术文章与技术报告,是电路与系统学科以及相关学科内的科研技术人员、高等学校教师及研究生、各级科研及高新技术产业管理人员阅读和参考的重要期刊,是各级科技图书情报机构和信息机构不可少的订藏刊物。
采集每个通道信号前还要采集两个不同的基准电压, 实现仪表在测量中的自校正功能。
电路中精密基准电源MAX872 输出的 2.5V 电压经精密电阻R1(66kΩ)、R3(192kΩ)分压后,将约为640mV 左右加在X9241 的0 号电位器分压。
此时继电器S4、S5、S6 断开,继电器P37 合上。
1、硬件设计信号调理电路单路输入的硬件结构,包括信号输入、放大、单片机控制等几大部分。
信号输入电路由精密基准电源MAX872、光继电器AQW212E、运放4502 及精密仪表开关电容模块LTC1043 等组成。
其中精密基准电源的使用一方面提升输入信号的电位, 避免低电位测量时的干扰误差;另一方面作为一路检测电路, 其测量结果可以修正其它回路的检测结果, 实现系统的在线自校正。
MAX872 具有较宽的电压输入范围(2.7~20V),输出精度可达 2.500V ± 0.2%。
LTC1043CN 是双精密仪表开关电容,电容外接, 多用于精密仪表放大电路、压频转换电路和采样保持电路等。
当内部开关频率被设定在额定值300Hz时,LTC1043CN 的传输精确度最高, 此时电容器CS 和CH大小均为 1 μ F。
LTC1043CN 和运放LT1013 组成差分单端放大器,采用LTC1043CN为差分输入的电压采样值, 电压保持在电容器CS上并送到接地参考电容器CH 中, 而CH 的电压送到LT1013 的非反相输入端放大。
纳伏级微弱信号放大电路的设计
纳伏级微弱信号放大电路的设计摘要:从当前我国通信行业发展情况来看,其为工程测量工作开展奠定了坚实基础,纳伏级微弱信号放大电路的设计可以实现对信号有效调理,并且降低噪声,其主要运用了多级放大电路的组态形式,并且利用仿真软件对系统噪声进行了分析,使得信噪比得到改善。
基于此,本文也尝试对纳伏级微弱信号放大电路设计进行了深入探讨。
关键词:纳伏级微弱信号;放大电路;设计随着我国科技水平的不断提升,对于微弱信号检测技术的研究不断深入,弱光检测技术、微振动检测技术以及低电平电压检测技术等等进入到人们视野。
由于被检测目标信号极其微弱,如果运用普通的电子器件对其进行检测操作,往往存在较为严重的误差,这也使得最终的检测结果浮动范围不符合要求,这时候则需要运用微弱信号检测技术,其主要是通过放大器来保证其输入阻抗得以提升,而输出阻抗则尽可能降低。
目前来看,在开展弱信号检测工作时,不仅对检测器件有很高的要求,同时也对待测信号的动态范围以及响应速度有严格要求,只有保证其各方面要求符合标准,才能使最终检测结果准确性得到保证。
1.关于微弱信号及其检测的基本简介对于微弱信号检测来说,其在实际开展过程中,主要是利用电子学以及物理学等方法来尽可能恢复被噪声所掩盖的微弱信号,从而达到提取信号以及运用信号的目的。
从当前我国微弱信号检测技术发展情况来看,其主要是从提高检测系统输出信号的信噪比入手,从而实现对现有微弱信号的放大。
通常情况下,在开展微弱信号检测工作时,前置放大器是噪声引入的主要部件之一,因此在进行微弱信号检测设计时,首先应该注意保证第1级的噪声系数足够小,这样才能使最终检测准确性得到保证。
在对整个检测电路的噪声系数进行控制时,应该以前置放大器的噪声系数为基础,由此可以看出,系统前置放大器的选择以及相关电路设计非常重要,直接关系到后续各项检测工作的开展。
当前,微弱信号检测电路的基本结构为:微弱电压信号——电压放大电路——带通滤波电路——A/D转换电路。
小信号放大和检波电路-概述说明以及解释

小信号放大和检波电路-概述说明以及解释1.引言1.1 概述概述部分的内容可以如下编写:在电子工程学中,小信号放大和检波电路是两个非常重要的电路技术。
小信号放大电路被广泛应用于电子设备中,用于放大微弱的信号,使其能够被后续的电路部分处理。
而检波电路则用于将信号转换为可测量或可用于其他用途的形式。
小信号放大电路的作用在于将微弱的信号放大到可以进行后续处理的程度。
对于一些微弱的输入信号,如传感器输出、天线接收到的无线信号等,需要经过放大才能提供足够的幅度和信噪比。
小信号放大电路的基本原理是通过扩大信号的振幅,同时保持信号的形状不发生失真。
常见的小信号放大电路类型包括共射放大器、共基放大器、共集放大器等。
检波电路则用于将信号转换为可以进行测量或其他用途的形式。
在无线通信系统中,检波电路常用于将调制信号解调出来,恢复原始的基带信息。
在音频领域,检波电路常用于音频信号的放大、录制和播放等。
检波电路的基本原理是通过对输入信号进行非线性操作,将其转换为包络信号或直流成分。
常见的检波电路类型包括整流器、解调器和鉴频器等。
小信号放大和检波电路在各个领域都有广泛的应用。
在通信技术中,小信号放大电路在无线传输、射频电路和调制解调等方面起着重要作用。
检波电路则在无线通信、音频处理和数据采集等领域具有重要应用。
随着科技的不断进步和应用需求的不断增加,对小信号放大和检波电路的研究和应用也将不断深入,为各个领域的发展提供强有力的支持。
文章结构部分的内容应该包含有关整篇文章的结构和内容安排的说明。
可以参考以下内容撰写文章1.2的内容:1.2 文章结构本文主要讨论小信号放大和检波电路的原理、类型及其应用前景。
为了使读者更好地理解文章内容,本文按照以下结构组织:引言部分将首先对文章的主题进行概述,介绍小信号放大和检波电路的基本概念和作用。
然后,详细阐述本文的目的和意义,以引起读者的兴趣和阅读动力。
正文部分分为两个主要部分:小信号放大电路和检波电路。
信号采集输入电路的设计与实现
实验课程名称:监测控制系统应用实验四实验项目名称:信号采集输入电路的设计与实现实验成绩:实验者:专业班级:电信130 班同组者:实验日期:周四3~4节课一.实验目的1.掌握模拟量的输入接口电路的设计。
2.熟悉市面上常用的AD转换芯片的性能及特点3.掌握AD转换芯片硬件连接方法和基本编程方法。
4.掌握模拟量采集的软件编程技巧二.实验内容1.用信号发生器产生各种输出电压信号,设计一信号采集系统实时测量该信号发生器的输出并显示出来。
2.信号发生器分别输出直流、方波、正弦波信号供系统采集,研究信号采集系统如何保证准确性、精度、实时性。
具体任务:1、模拟量采集系统的设计开发板有AD转换芯片的,依托开发板设计模拟量采集系统的硬件和软件,实验时用实验室的信号发生器产生模拟量。
开发板上没有AD转换芯片的,自由设计模拟量采集系统的硬件和软件,实验时,在proteus环境下,用信号发生器产生模拟量,仿真实验。
2、采集系统准确性实验让信号发生器分别输出1V、3V、5V、7V、9V、11V、13V的直流电压,记录采集系统的采集值。
观察测量值与实际值的差距,从硬件和软件两方面分析原因,改进系统,直至达到满意的测量结果,记录相应的测量结果。
思考采集系统的精度如何提高,给出答案。
(选做:对于用proteus仿真实验的同学,调整系统设计,使测量精度提高一个档次,记录实验结果)3、采集系统实时性实验让信号发生器输出方波信号,观察采集系统显示器显示的采集值是否跟踪输入信号的值跳变。
加大方波信号的频率,直到系统不能跟踪测量,记录采集系统能够跟踪测量的频率范围。
分析得出提高你的采集系统实时性的措施有哪些,改进系统,直至达到满意的效果,记录此时采集系统能够跟踪测量的频率范围。
让信号发生器输出连续的正弦波信号,观察此时已经进行了准确性和实时性优化的系统的采集结果,如果效果不好,分析原因并改进。
三.探究内容:AD转换结束后可以通过查询或中断的方式读取转换结果,针对本实验任务,是采用查询方式好还是中断方式好?四.实验原理1. PCF8591芯片PCF8591是单片、单电源低功耗8位CMOS数据采集器件,具有4个模拟输入、一个输出和一个串行I2C总线接口。
微小信号采集电路的设计与研究_刘文光

微小信号采集电路的设计与研究刘文光 牛荣军 陈扬枝摘要 介绍微小信号采集电路的硬件、软件设计和工作原理,将采集到的微小信号放大后进行A/D转换,并通过串行通信方式传送到上位机,以便对信号进行分析处理。
经对所制作微小信号采集电路的试验测试,测试结果显示,采集电路性能满足设计要求。
关键词:微小信号 采集 模数转换中图分类号:TP24 文献标识码:A 文章编号:1671—3133(2005)07—0101—03D esi gn and study on the circu it for collecti ng ti n y si gna lL iuW enguang,N i u R ongj un,Chen YangzhiAb strac t The desi gn o f hard w are and so ft w are o f t he circu it fo r co llecting ti ny si gnal and its ope ra ti ng pri nc i p l e ha s been i n tro-duced.So a s t o analyze and dea lw ith the signal,the co llected ti ny si gna l has been ADC a fter a m plified,and send it to t he PC through UART.A fter t esti ng experi ment on t he c ircuit o f co llecti ng tiny signa l,t he resu lts turn out t hat the pe rfor m ance o f the cir-cuit for co llecti ng can reach t o the request of desi gn.K eyword s:T i ny signal Collec tion ADC 医用人体管道微机器人是当前国际微机械电子技术研究的一个热点,其研究难点在于微机器人的驱动方法及其驱动装置。
微弱信号采集处理电路

微弱信号采集处理电路微弱信号采集处理电路微弱信号采集处理电路摘要:文中介绍了一种医学用的检测信号的采集处理电路,它能够准确的将微弱信号放大,具有精度高、噪声低、高抗干扰能力、低漂移、高稳定性、线形与保真度好、有合适的输入与输出阻抗、响应快、可靠性与经济性等优点。
关键词:血小板聚集;微弱信号;处理电路由血小板聚集功能异常可检测出因聚集功能低下所造成的出血倾向疾病,或因聚集功能过高所形成的血栓,诊断血栓栓塞并发症,如中风、心梗等疾病元监测,并可提早预防避免发生。
同时可用于研究,如血小板药物学研究、中西药节选抗血小板药物之测定研究中医药活血化淤机理等。
全血经低速离心,去除红细胞、白细胞,制备富含血小板血浆(PRP)。
在特定的连续搅拌条件下于富含血小板血浆(PRP)中加入诱导剂时,由于血小板发生聚集,悬液的浊度就会发生相应的改变,光电池将浊度的变化转换为电信号的变化,在记录仪上予以记录,根据聚集曲线可计算出血小板聚集的程度和时间。
一、总体设计1.整体设计。
上述血小板聚集功能检测过程很容易受到外界电信号和客观环境的干扰,为了抗干扰,准确的采集有用信号,应系统采用调制解调电路。
调制电路使用的是光电调制,解调电路采用精密整流型相敏检波电路。
整体设计主要包括激励电路、采集电路、调理电路三部分,功能主要是进行检测信号的采集。
整个硬件功能齐全,结构简单,成本低廉,易生产。
2.影响检测精度的因素。
①机械定位的准确性。
根据检测的原理,检测装置的光电发射与光电接收的光轴应一致,因此要求发射部件与接收部件应该水平,中心对应,并且为了避免引入杂光,发射部件与接收部件都一定要采用黑色阳极氧化的工艺,且光轴应在试样中心。
另外,我们设置了4条并行的检测通道,为了达到一致性,要求各通道发射部件发射的光束平行,光强一致,发射部件的发射面积相同,同时各接收部件的接收面积也要相同,这就对机械定位要求很高,这将直接影响检测的重复性、一致性。
低频信号采集电路的设计与实现
3.1 电流采样算法 电流采用傅式算法进行采样,采用正弦与余弦
函数作为样品函数,将正交样品函数与待分析的时 变函数进行相应的积分变换,以求与样品函数频率 相同分量的实部与虚部系数,进而可以求出待分析 的时变函数中该频率的谐波分量的模值和相位。
0 引言
低,不利于智能化发展。文献[3]中设计一种基于采样
随着我国近年来的快速发展,人们对于能源 的需求一直都在增加。风力发电、光伏发电等新能 源成为人们关注的方向。新能源不同于传统能源, 其发电的发电功率并不稳定,有一定的间歇性和季 节性特点,此外新能源发电输出并没有达到50Hz 的标准,这给电力参数的采集带来了一定的困难与 挑战。电力参数的采集作为电力系统监测的基本环 节,具非常重要的作用。随着我国新能源的发展, 对电力数据采集电流采样程序设计 本文采用STM32F103VET6内部的12位ADC转换 模块,输入电压范围为0~3.3V。通过控制芯片内部 ADC控制寄存器2:ADC_CR2的ADON位来控制, 写1时开始转换,写0时停止转换,最后通过I2C在 OLED上进行显示,ADC处理程序框图如图5所示。
将被采样的模拟信号视为一个周期性时间函 数,根据傅式级数的概念,将此周期函数分解为不 衰减的直流分量以及各整次的谐波分量。其表达式 为式(5)。
(5) 式中,n为自然数,n=0,1,2,……,an和bn分别为 各次谐波正弦项和余弦项的振幅;ω1为基波角频 率。根据三角函数的正交性可得到式(6)。
(6) 令n=1,可得到式(7)。
(4)霍尔电流传感器;(5)OLED显示屏;(6)
信号调理电路。本文采用变频器(单相进三相出)
mcu adc 交流采样 运放电路设计

MCU ADC 交流采样运放电路设计一、背景介绍1. MCU(Microcontroller Unit,微控制器单元)是指在单个集成电路中包括了微处理器核心、存储器和各种输入输出端口,能够实现控制、调度和数据处理等功能的芯片。
MCU在各种电子设备中广泛应用,例如家用电器、汽车电子、工业控制等领域。
2. ADC(Analog-to-Digital Converter,模数转换器)是一种电子设备,用于将模拟信号转换为数字信号。
ADC的精度和性能对于系统的整体性能非常重要,尤其在对于交流信号进行采样时,需要特别注意设计和选择合适的电路。
3. 交流信号是指信号在一定时间内的振幅和频率都会发生变化的信号,常见的交流信号有声音、电压等。
采集和处理交流信号需要特殊的电路设计和算法。
二、MCU ADC 交流采样的需求1. 在许多应用中,需要对交流信号进行采样并进行数字化处理,例如音频处理、功率检测、医疗设备等。
MCU通常配备了内置的ADC,可以直接对模拟信号进行采样和转换。
2. 对于交流信号的采样,需要注意信号的频率范围、采样率、信噪比等参数。
另外,需要设计合适的前端电路,滤除干扰信号、调节增益,并保证采样的准确性和稳定性。
3. 运放(Operational Amplifier,简称运放)是一种重要的电子元件,常用于放大、滤波、比较、积分等电路功能。
在MCU ADC的交流采样中,运放电路起着至关重要的作用,可以对信号进行前置放大、滤波和阻抗匹配等处理。
三、MCU ADC 交流采样运放电路设计要点1. 信号放大:对于微小幅度的交流信号,需要使用运放进行前置放大,以提高信噪比和增强采样精度。
在选择运放时,需要考虑增益范围、输入输出阻抗、噪声等参数。
2. 滤波设计:交流信号常受到环境噪声和干扰的影响,需要设计滤波电路对信号进行滤除。
常用的滤波电路包括RC滤波器、巴特沃斯滤波器、莫尔斯滤波器等,需要根据实际信号特性选择合适的滤波器类型和参数。
心电信号采集电路实验报告
心电放大电路实验报告一概述心脏是循环系统中重要的器官。
由于心脏不断地进行有节奏的收缩和舒张活动,血液才能在闭锁的循环系统中不停地流动。
心脏在机械性收缩之前,首先产生电激动。
心肌激动所产生的微小电流可经过身体组织传导到体表,使体表不同部位产生不同的电位。
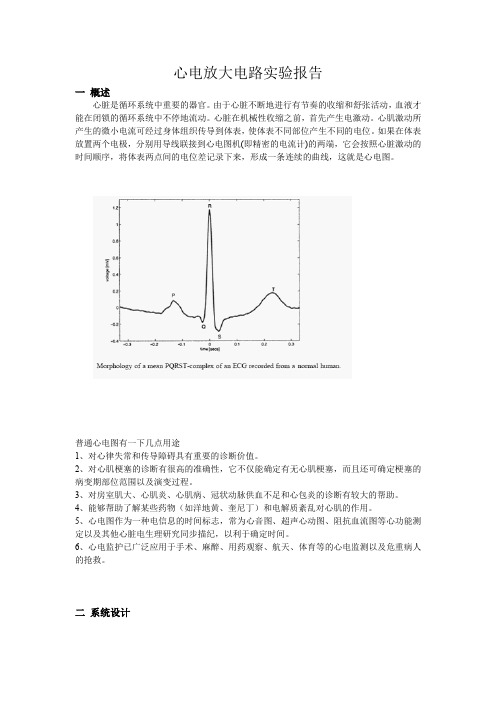
如果在体表放置两个电极,分别用导线联接到心电图机(即精密的电流计)的两端,它会按照心脏激动的时间顺序,将体表两点间的电位差记录下来,形成一条连续的曲线,这就是心电图。
普通心电图有一下几点用途1、对心律失常和传导障碍具有重要的诊断价值。
2、对心肌梗塞的诊断有很高的准确性,它不仅能确定有无心肌梗塞,而且还可确定梗塞的病变期部位范围以及演变过程。
3、对房室肌大、心肌炎、心肌病、冠状动脉供血不足和心包炎的诊断有较大的帮助。
4、能够帮助了解某些药物(如洋地黄、奎尼丁)和电解质紊乱对心肌的作用。
5、心电图作为一种电信息的时间标志,常为心音图、超声心动图、阻抗血流图等心功能测定以及其他心脏电生理研究同步描纪,以利于确定时间。
6、心电监护已广泛应用于手术、麻醉、用药观察、航天、体育等的心电监测以及危重病人的抢救。
二系统设计心电信号十分微弱,频率一般在0.5HZ-100HZ之间,能量主要集中在17Hz附近,幅度大约在10uV-5mV之间,所需放大倍数大约为500-1000倍。
而50hz工频信号,极化电压,高频电子仪器信号等等干扰要求心电信号在放大的过程中始终要做好噪声滤除的工作。
下图为整体化框图。
三具体实现电路图如下:1 导联输入:导联线又称输入电缆线。
其作用是将电极板上获得的心电信号送到放大器的输入端。
心脏电兴奋传导系统所产生的电压是幅值及空间方向随时间变化的向量。
放在体表的电极所测出的ECG信号将随不同位置而异。
心周期中某段ECG描迹在这一电极位置不明显,而在另一位置上却很清楚。
为了完整描述心脏的活动状况,应采用多电极导联方式测量心电信号,基于现在的实验条件及要求,选择3导联方式:左臂(LA),右臂(RA)以及右腿(RL)。
微弱信号检测采集系统设计
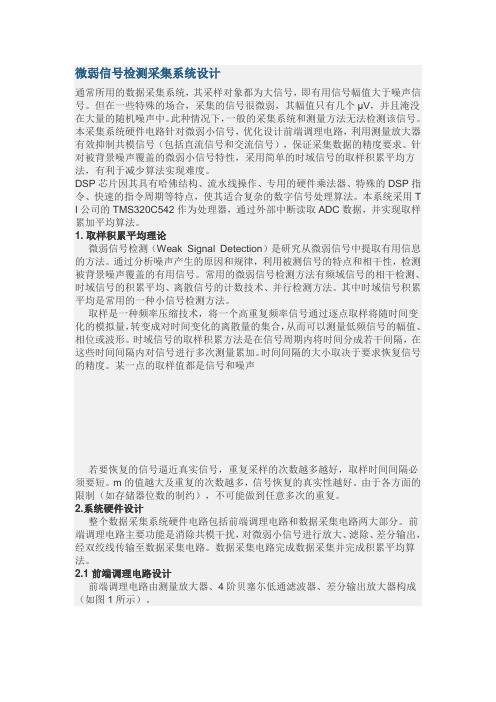
微弱信号检测采集系统设计通常所用的数据采集系统,其采样对象都为大信号,即有用信号幅值大于噪声信号。
但在一些特殊的场合,采集的信号很微弱,其幅值只有几个μV,并且淹没在大量的随机噪声中。
此种情况下,一般的采集系统和测量方法无法检测该信号。
本采集系统硬件电路针对微弱小信号,优化设计前端调理电路,利用测量放大器有效抑制共模信号(包括直流信号和交流信号),保证采集数据的精度要求。
针对被背景噪声覆盖的微弱小信号特性,采用简单的时域信号的取样积累平均方法,有利于减少算法实现难度。
DSP芯片因其具有哈佛结构、流水线操作、专用的硬件乘法器、特殊的DSP指令、快速的指令周期等特点,使其适合复杂的数字信号处理算法。
本系统采用T I公司的TMS320C542作为处理器,通过外部中断读取ADC数据,并实现取样累加平均算法。
1. 取样积累平均理论微弱信号检测(Weak Signal Detection)是研究从微弱信号中提取有用信息的方法。
通过分析噪声产生的原因和规律,利用被测信号的特点和相干性,检测被背景噪声覆盖的有用信号。
常用的微弱信号检测方法有频域信号的相干检测、时域信号的积累平均、离散信号的计数技术、并行检测方法。
其中时域信号积累平均是常用的一种小信号检测方法。
取样是一种频率压缩技术,将一个高重复频率信号通过逐点取样将随时间变化的模拟量,转变成对时间变化的离散量的集合,从而可以测量低频信号的幅值、相位或波形。
时域信号的取样积累方法是在信号周期内将时间分成若干间隔,在这些时间间隔内对信号进行多次测量累加。
时间间隔的大小取决于要求恢复信号的精度。
某一点的取样值都是信号和噪声若要恢复的信号逼近真实信号,重复采样的次数越多越好,取样时间间隔必须要短。
m的值越大及重复的次数越多,信号恢复的真实性越好。
由于各方面的限制(如存储器位数的制约),不可能做到任意多次的重复。
2.系统硬件设计整个数据采集系统硬件电路包括前端调理电路和数据采集电路两大部分。
电流小信号隔离采集板的设计与实现
N , 1的工作 原理 , 计 了隔 离采集 板 的硬件 电路 , 析 了信 号 的变 换 过程 、 论 依 据和 参 数选 择 。 实验 结果 证 明 该设 计 正 确 可用 , P0 2 设 分 理 具 有较 高的采 集精 度和 线性 度 , 对稳 定性 、 精度 要求 高 的场合具 有广 泛 的应用 前景 。 在 测量
叫
扰环境下进行数据 采集 , 种干扰 信号 都会 随着被 测 各 信号进入 到采集 和测量 系统… , 方 面这些 信号叠 加 一
在有用 的被测信号上会影 响测量精度 ; 另一方 面 , 高电 压 、 电流 的干扰 信号窜 入处理 器 电路 ( MC D P 大 如 U、 S 等 ) 轻则 造 成 系 统不 稳 定 , 则对 这 些 器 件 造 成 毁 , 重
一
图 1 H N 2 1的 结 构 原 理 图 C R0
F g 1 Ar ht cu eo i. c i t r fHCN 01 e R2
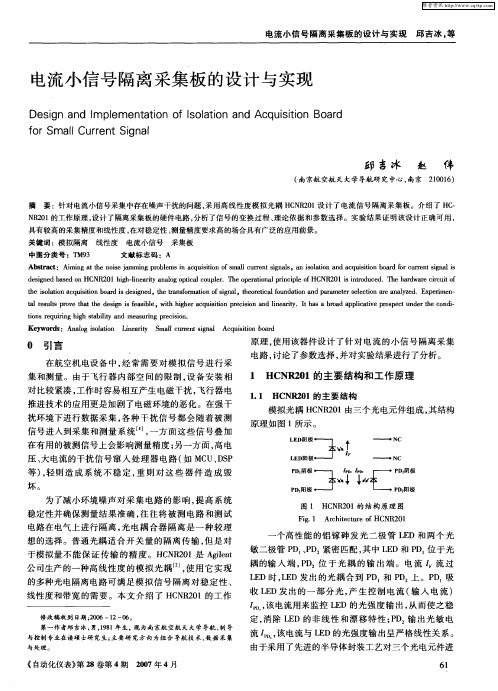
想的选择 。普通光耦适 合开关 量 的隔离 传输 , 是 对 但 于模拟 量不 能保 证传 输 的精 度 。H N 2 1是 A in C R0 g et l 公 司生产 的一种高线性 度 的模拟 光耦 J使用 它实 现 , 的多种光 电隔离电路 可满足模 拟 信号 隔离对稳 定性 、 线性度 和带宽 的需 要 。本 文介绍 了 H N 2 1的工作 C R0
11 HC R O . N 2 1的主 要 结构
对 比较 紧凑 , 工作 时容易相互产 生电磁 干扰 , 飞行器 电
推进技术 的应用更是加 剧了电磁 环境的恶化。在强干
模拟光耦 H N 2 1由三个光 电元 件组成 , C R0 其结构
原理如 图 1 示 。 所 LDJ ] I ̄ E +
基于单片机的微小电阻测量系统设计
电阻的测量精度,目前,广泛地采用四线接法测量微
小 电 阻 。 四 线 接 线 法 测 量 原 理 如 图 1 所 示 ,其 中 Rx
图2
为被测电阻,IS 为加到被量电阻上的恒流源,R1 和 R2
为恒流源导线上的等效电阻,V 为电压表,R2 和 R3 为
除导线电阻对微小电阻测量值的影响,能直接提高
- 86 -
IO =
UA
R8
(2)
其中,IO 为输出电流,R8 为取样电阻。R2、R3、R4、
R5 和 R6 为电压调节电路,调节 R5 的电阻时,A 点的电
杨秀增,
等 基于单片机的微小电阻测量系统设计
图5
图 3 高精度恒流源电路
当 C7=C6=C,R4=R5=R 时,电压增益表达式为:
电压表导线的等效电阻。由电路知识可知,当把电
压表接触到被测电阻 Rx 两端时,电压表 V、R1、R2 和 Rx
形成一个闭合回路,由于流过 R1 和 R2 上的电流相等
并方向相反,电压表 V 两端的电压 Vx 与被测量电阻
Rx 的电压相等,被测电阻的阻值可以表示为:
V
Rx = x
IS
(1)
系统总体设计方案
3 硬件设计
3.1
高精度恒流源电路
图 3 为 本 测 试 仪 所 采 用 的 恒 流 源 电 路 ,为 了 提
高恒流源的性能,该系统采用一块高性能的基准电
压产生芯片 LM399 进行设计。由图 3 可知,恒流源
电路由基准电压芯片 U1、电压跟随器 U2、U3、U4、扩流
管 T1 组成。LM399 第 1 脚输出 6.95 V 电压,经分压
基于MEMS矢量水听器微弱信号提取电路的设计与测试

hl n sr e e niv yi a iha 一10d ( B:1V i ) T eME et y r hn i h ei o o l a adi ci r e sit s s g s 6 B 0d t e v s t i h /x . h MSvc r do oewt ti ds nn t ny P oh p h s g
很 好 地 对 水 听 器 采 集 到 的信 号进 行 放 大 , 现 为水 听 器的 接 收 灵敏 度 为 一10d ( B=1V p a 。采 用 这种 电路 设 计 表 6 B 0d / ̄ ) P
的 ME S矢量水听器不仅 具有令人 满意 的… 字形方向特性 , M 8’ 而且具有 良好 的低频特性 , 可以满足低频 声学测试 需要。 关键词 : MS矢量水听器; ME 微弱信号提取 ; 电路设计测试 中图分类号 :P 2 . T 7 11 文献标识码 : A 文章编号 :0 2—14 ( 00 0 07 0 10 8 12 1 )7— 04— 4
(. 1 中北大学仪器科学与动态测试教 育部重点实验室 , 山西太原
雷 姚 荣 国 ,
5 10 ) 4 0 1
0 05 ;. 3 0 12 中国人民解放军 7 34部队 , 62 广西桂林
摘要 : 文中介 绍 了一种基 于纤毛式 ME MS矢量水听 器微弱信号提取 电路 。该 电路采 用两级信 号放 大 , 两级之 间设计 二 阶巴特沃斯低通滤波器。该 电路设计经 电路 仿真软件进行仿真和水下测试。测试结果表 明: 该微弱信号提 取 电路 可以
W e k Sg lEx r c in Cic i sg nd Te t a ina ta to r u tDe in a s Ba e n M EM S Ve t r Hy o o e sd o c o dr ph n
电子工程学中的电路设计与信号处理

电子工程学中的电路设计与信号处理电子工程学是一门研究电子设备、电路和电子系统的学科,它涉及到电子器件的设计、制造和应用。
其中,电路设计和信号处理是电子工程学中两个重要的领域。
本文将从电路设计和信号处理两个方面展开讨论。
一、电路设计电路设计是电子工程学中的核心内容之一,它涉及到电路的组成、连接和优化。
在电路设计中,工程师需要考虑电路的功能需求、性能指标以及可行性等因素。
1.1 电路的组成电路是由电子器件和连接线路组成的。
电子器件包括电阻、电容、电感、二极管、晶体管等,它们通过连接线路相互连接起来,形成不同的电路结构。
1.2 电路的连接电路的连接方式有串联、并联和混合连接等。
串联连接是将电子器件依次连接在一起,电流在电路中依次流过每个器件;并联连接是将电子器件的两端连接在一起,电流在电路中分流;混合连接则是串联和并联的结合。
1.3 电路的优化在电路设计中,工程师需要考虑电路的性能指标,例如电压增益、频率响应、功耗等。
通过优化电路的结构和参数,可以达到更好的性能。
二、信号处理信号处理是指对信号进行采集、处理和分析的过程。
在电子工程学中,信号处理广泛应用于通信、图像处理、音频处理等领域。
2.1 信号的采集信号的采集是指将现实世界中的模拟信号转换为数字信号的过程。
这一过程通常包括信号的采样和量化。
采样是指按照一定的时间间隔对信号进行取样,将连续的模拟信号转换为离散的数字信号;量化是指将每个采样点的幅值转换为离散的数值。
2.2 信号的处理信号的处理包括滤波、编码、解码、压缩等过程。
滤波是指通过滤波器对信号进行去除噪声或改变频率响应;编码和解码是指将信号转换为数字编码,以便传输和存储;压缩是指通过压缩算法减少信号的数据量,以节省存储空间和传输带宽。
2.3 信号的分析信号的分析是指对信号进行频谱分析、时域分析等,以获取信号的特征和信息。
频谱分析是将信号分解为不同频率分量的过程,可以用于分析信号的频率特性;时域分析是对信号的幅度和相位进行分析,可以用于分析信号的时域特性。
飞机微小电压信号采集电路设计与验证
飞机微小电压信号采集电路设计与验证杨东亮【摘要】针对飞机上的微小电压信号采集精度偏低且在机上容易受干扰的现状,设计一种基于射频滤波器及仪表运算放大器的高精度微小电压信号采集电路,介绍了电路的拓扑形式、各功能电路的作用,阐述了各部分的设计要点,通过实物测试数据验证了电路的采集精度.【期刊名称】《电子测试》【年(卷),期】2018(000)007【总页数】2页(P81-82)【关键词】微小电压信号;射频滤波器;仪表运算放大器【作者】杨东亮【作者单位】航空工业西安航空计算技术研究所,陕西西安,710065【正文语种】中文0 引言飞机上的微小电压信号是指T4/T5/T6热电偶、火警传感器、载荷传感器、硅压电阻桥等传感器或敏感元件输出的-100~100mV的差分电压信号。
这类信号电压较低,由于在飞机上的敷设路径上的电磁环境比较复杂,这类信号特别容易受电磁干扰的影响,最终导致其采集精度较低。
同时,此类信号对应的故障等级及应急处置措施等级较高,如:火警传感器信号是判断飞机发动机是否失火的主要依据,T6热电偶信号是计算飞机发动机主燃烧室温度的重要参数。
因此,对这些信号的采集精度要求较高。
1 微小电压信号采集电路设计-100~100mV电压信号采集电路由以下几部分构成:射频滤波器、精密放大器、二阶有源低通滤波电路、AD转换电路、数字处理电路,如图1所示。
对于多路微小电压信号采集电路的应用环境,可以在射频滤波器的前级或者AD转换电路的前级添加多路选择器,实现后级电路的分时复用。
图1 微小电压信号采集电路基本构成射频滤波器用来滤除-100~100mV差分信号携带的共模干扰、差模干扰中的高频成分,由电阻、电容构成,下节有详细介绍。
仪表放大器选用AD公司低成本低功耗仪表运放AD620SQ/883B,采用双极性±15V供电,对射频滤波后的-100~100mV差分信号进行比例放大。
二阶有源低通滤波电路对放大后的单端信号进行二阶有源滤波,滤除其高频干扰。
低频弱电信号的采集与传输设计
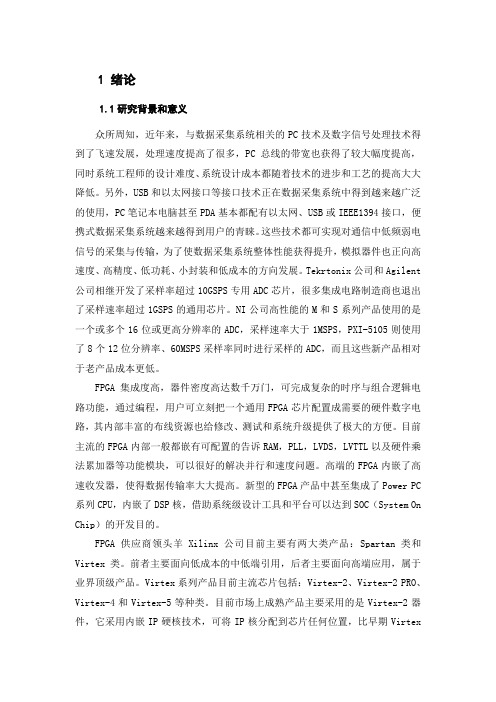
1 绪论1.1研究背景和意义众所周知,近年来,与数据采集系统相关的PC技术及数字信号处理技术得到了飞速发展,处理速度提高了很多,PC总线的带宽也获得了较大幅度提高,同时系统工程师的设计难度、系统设计成本都随着技术的进步和工艺的提高大大降低。
另外,USB和以太网接口等接口技术正在数据采集系统中得到越来越广泛的使用,PC笔记本电脑甚至PDA基本都配有以太网、USB或IEEE1394接口,便携式数据采集系统越来越得到用户的青睐。
这些技术都可实现对通信中低频弱电信号的采集与传输,为了使数据采集系统整体性能获得提升,模拟器件也正向高速度、高精度、低功耗、小封装和低成本的方向发展。
Tekrtonix公司和Agilent 公司相继开发了采样率超过10GSPS专用ADC芯片,很多集成电路制造商也退出了采样速率超过1GSPS的通用芯片。
NI公司高性能的M和S系列产品使用的是一个或多个16位或更高分辨率的ADC,采样速率大于1MSPS,PXI-5105则使用了8个12位分辨率、60MSPS采样率同时进行采样的ADC,而且这些新产品相对于老产品成本更低。
FPGA集成度高,器件密度高达数千万门,可完成复杂的时序与组合逻辑电路功能,通过编程,用户可立刻把一个通用FPGA芯片配置成需要的硬件数字电路,其内部丰富的布线资源也给修改、测试和系统升级提供了极大的方便。
目前主流的FPGA内部一般都嵌有可配置的告诉RAM,PLL,LVDS,LVTTL以及硬件乘法累加器等功能模块,可以很好的解决并行和速度问题。
高端的FPGA内嵌了高速收发器,使得数据传输率大大提高。
新型的FPGA产品中甚至集成了Power PC 系列CPU,内嵌了DSP核,借助系统级设计工具和平台可以达到SOC(System On Chip)的开发目的。
FPGA供应商领头羊Xilinx公司目前主要有两大类产品:Spartan类和Virtex类。
前者主要面向低成本的中低端引用,后者主要面向高端应用,属于业界顶级产品。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
微小信号采集电路的设计与研究刘文光 牛荣军 陈扬枝摘要 介绍微小信号采集电路的硬件、软件设计和工作原理,将采集到的微小信号放大后进行A/D转换,并通过串行通信方式传送到上位机,以便对信号进行分析处理。
经对所制作微小信号采集电路的试验测试,测试结果显示,采集电路性能满足设计要求。
关键词:微小信号 采集 模数转换中图分类号:TP24 文献标识码:A 文章编号:1671—3133(2005)07—0101—03D esi gn and study on the c i rcu it for collecti n g ti n y si gna lL i u W enguang,N i u Rongjun,Chen Yangzh iAbstract The design of hard ware and s oft w are of the circuit f or collecting tiny signal and its operating p rinci p le has been intr o2 duced.So as t o analyze and deal with the signal,the collected tiny signal has been ADC after a mp lified,and send it t o the PC thr ough UART.After testing experi m ent on the circuit of collecting tiny signal,the results turn out that the perfor mance of the cir2 cuit f or collecting can reach t o the request of design.Keywords:T i n y si gna l Collecti on ADC 医用人体管道微机器人是当前国际微机械电子技术研究的一个热点,其研究难点在于微机器人的驱动方法及其驱动装置。
笔者采用一种新型的轮式驱动方法及其驱动装置设计了管道微机器人的模型样机(如图1所示)。
该驱动方法通过弹性啮合与摩擦耦合组合传动的方式使微机器人运动。
目前微机器人已经顺利通过直径<20mm的塑料管道的实验,证明了该驱动方法及其驱动装置的原理可行性。
因为微机器人采用的是一种新型的轮式驱动方法,该驱动方法最终要使用到医用人体管道微机器人,具体应用到人体肠胃道环境,其性能是否可靠需要进一步的理论与实验研究。
同时管道微机器人采用的是直径为<8mm的微直流电动机为驱动源,其输出驱动力十分微小,如此大小的驱动力能否带动管道微机器人在人体肠道这种粘弹性环境中顺利运行,还需要对微机器人的驱动力进行测试与研究。
由于管道微机器人驱动力的微小性,给测试与研究带来很大的困难。
为了测试管道微机器人驱动力的大小,实验过程中利用悬臂梁式微小力传感器将微小力信号转换成微小电压信号。
传感器输出的微小电压信号经过放大并A/D转换后直接送入微机进行计算、存储和显示。
基于上述设计要求,本文对微小信号采集电路进行了设计和研究。
图1 微机器人模型样机1 采集电路的硬件设计1.1 电路的组成与工作原理采集电路主要包括放大电路、A/D转换和单片机三部分,组成框图如图2所示。
其工作原理是:管道微机器人的驱动力作用在悬臂梁式微小力传感器上,传感器将微小力信号转换成微小电压信号。
微小电信号输入到采集电路后,经过二级放大电路放大到0~5V,以满足A/D转换的需要,放大后的电压信号送入A/D 转换芯片ADS1286。
AT89C51单片机根据ADS1286 4)在松开轴向锁定螺钉6时,螺钉不可松开过多,一般应控制在1/4~1/2圈内,以保证O形密封圈始终都处在压偏的密封状态下。
5 结语可调偏心卡盘已在C620车床和曲柄磨床上使用,解决了695Q型柴油机曲轴等偏心件的生产问题。
实践证明,使用效果良好。
参 考 文 献1 顾维邦.金属切削机床概论[M].北京:机械工业出版社, 19912 陈万利.机械设备改装[M].北京:机械工业出版社,19973 陈永泰.机械制造技术实践.北京:机械工业出版社,20014 陆剑中.金属切削原理与刀具.北京:机械工业出版社,1999作者通迅地址:湖南工学院(筹)西校区机械系(衡阳421101)收稿日期:20050104 交叉学科:机械工程/生物医学・艺术造型 的工作要求产生控制A /D 转换的时序脉冲,并发送到ADS1286芯片。
ADS1286芯片将输入的放大电压信号转换成数字信号并送入单片机。
单片机通过串行通信的方式将数字信号送入微机,数据显示软件接收单片机发送的数字信号并将数字信号换算成电压信号,并把电压时间曲线在电脑上显示出来。
通过观察随时间变化的电压的波动情况,可以分析管道微机器人运行过程中驱动力的变化情况。
采集电路中,二级放大电路直接由开关电源提供±12V 工作电压,ADS1286由高精度基准源AD586提供5V 电压,AT89C51由三端稳压块7805提供电源。
图2 采集电路原理框图1.2 放大电路的设计放大电路的设计主要由输入微小信号的特性和A /D 转换器的0~5V 输入范围决定。
由于管道微机图3 放大电路原理图器人驱动力的微弱性,经过传感器采集后其输出的电压一般是毫伏级甚至是微伏级,因此放大电路设计最基本的要求就是要有大的增益。
放大电路的原理如图3所示。
本放大电路采用两级放大的方式,并采用差分输入方式以减小外界干扰。
第一级放大采用芯片I N A128进行放大,I N A128是一款精密度卓越的通用型仪表放大器,只须配用一个外部电阻,其增益便可在1~10000V /V 之间设定,其静态电流仅750μA 。
I N A的其他主要技术指标:5μV 的最大失调电压;0.5μV /℃的漂移,120dB 的高共模抑制,输入保护达±40V 。
第一级放大倍数为500。
第二级放大采用的是国产的高精度、低漂移OP07双极运算放大器,该级放大电路通过调节可调电阻的大小可以控制放大倍数的多少。
整个放大电路的放大倍数就是两级放大倍数的乘积。
1.3 A /D 转换为了将放大后的电压信号可以送入电脑进行计算、存储和显示,需要将电压模拟信号转换成数字信号。
为保证系统精度,减少由于模数变换时引入的量化误差,应选用高分辨率的A /D 转换芯片。
本电路使用的A /D 转换芯片是ADS1286,其为12位分辨率,20kHz 采样频率,低功耗,工作电流仅为250μA ,采用串行接口通信适合远距离信号传输。
单片机用来产生控制A /D 转换的时序脉冲信号,同时将输出的串行数字信号保存到单片机,并通过串行方式上传到微机进行分析处理。
基于AT89C51控制器的I/O 口资源分配为:时序信号(DCLOCK )接P1.0,串行数据输出(D OUT )接P1.1,片选端(CS/SH 2I CN )接P1.2。
2 采集电路的软件设计2.1 单片机软件设计图4 单片机工作流程单片机主要为ADS1286数模转换芯片提供转换脉冲时序,并接收ADS1286发送出来的数字信号和将数字信号发送到电脑显示。
其具体工作流程如图4所示。
2.2 数据显示软件的设计为了更好地对采集电路放大转换后的电压信号进行分析,利用C ++builder 编写了数据显示软件,将电压时间曲线显示出来。
软件主要有接收单片机发送的数字信号、将数字信号转换成模拟信号、显示电压时间曲线、显示当前电压值和存储图片等功能。
该数据显示软件界面如图5所示。
图5 数据显示软件界面3 实验测试及数据处理微小信号采集电路实验测试仪器选用:量程为 交叉学科:机械工程/生物医学・艺术造型 500g 的压力传感器YZC -1R 、万用表、电脑、±12V 开关电源、采集电路和不同规格的质量块等。
3.1 实验测试测试时依次在压力传感器上加载不同规格的质量块,软件界面上显示出不同的电压时间曲线,利用高精度万用表可以测得输出电压的平均值。
微小力输入与电压输出结果如表1所示。
表1 输入输出表加载重量/mg输出电压平均值/mV0227.85100228200228.2300228.4400228.6500228.75600228.9700229.1800229.3900229.51000229.73.2 数据处理将上述数据连成曲线,可以得出输入输出特性曲线如图6所示。
假设拟合直线方程为f =a 0+KU ,利用最小二乘法,将曲线拟合成直线。
可以得到输入与输出的关系式为:f =542.56U -123614.18。
当一未知压力加载到压力传感器上时,可以得到输出电压的平均值,利用输入输出关系式就可以求出未知压力的大小。
4 结论分析数据采集电路实验测试数据和输入输出特性曲线可以看出,该采集电路线性好、精度高、漂移小、电路的抗干扰能力很强。
而且该电路采用ADS1286进图6 输入输出特性曲线行A /D 转换,将放大后的模拟信号转换成数字信号送入电脑显示,实现了设计的预期目的。
该数据采集电路集放大、A /D 转换和串行通信于一体,结构简单,性能可靠。
电路除了应用于医用人体管道机器人驱动力的测量之外还可以用于其他微小信号的测量之中。
参 考 文 献1 陈扬枝,陈和恩,黄平,张见威.管道微机器人单轮直接驱动方法及其驱动装置.中国专利申请号:03113927.2,2003232172 htt p://www .114ic .com /114ic /iczl/a .ht m3 沙洪.高精度5V 基准源AD586.国外电子元器件,1998,24 颜重光.新型低功率仪表放大器.仪表技术,1997(1)5 陆妩,任迪远,郭旗等.OP07运算放大器的电离辐射损伤和退火特性研究.半导体技术,1997.2.1(1)6 何立民.单片机高级教程应用与设计.北京:北京航空航天大学出版社,19997 Steven Holzner,董春雷,赵军译.Borland C ++f orW indows程序设计.北京:清华大学出版社,19948 王化详,张淑英.传感器原理及应用.天津:天津大学出版社,1998作者通讯地址:华南理工大学(广州510640)收稿日期:20050129■敬告本刊已全文编入《中国期刊网》、《中国学术期刊(光盘版)》、《万方数据科技期刊群》、《中国科技期刊数据库》、《CEPS 》等光盘、网络数据库。
本刊一次性支付给作者的稿酬中不仅仅是印刷纸介版本的稿酬,也包括上述光盘及网络版本的著作权使用费。
若您不愿意在上述数据库中披露您的论文,请作者在投稿时声明并慎重投稿。