基于超声波技术的3D定位系统研制
科学家制出蝙蝠超声波“回声定位”3D效果模型等

科学家制出蝙蝠超声波“回声定位”3D效果模型等作者:来源:《发明与创新(综合版)》2010年第05期科学家制出蝙蝠超声波“回声定位”3D效果模型近日美国科学家研究发现,在具有繁琐障碍物的环境下,蝙蝠会通过变动声音频率来为自己做回波定位。
美国科学家在实验过程中还专门制作出了一个3D“回声定位”效果模型。
据报道,来自美国布朗大学的科学家发现,蝙蝠能巧妙地调整声音的频率做到回波定位,从而适应特殊的杂乱地形。
研究人员为了测试出蝙蝠的定位能力和范围,专门设计了一个实验。
在实验中,研究人员在试验测试室里挂满了塑料链条,并给蝙蝠带上仅有半克重的麦克风,从而记录下蝙蝠从这些障碍物中穿梭飞行时候发出的声音。
当蝙蝠面对繁密的链条时,会调整它们飞行时发出的声音频率。
当原路返回时,蝙蝠们对路线已经非常清晰,不再需要变动声音频率来定位。
研究者们推测,比起使用单一的频率,多频定位可以帮助蝙蝠更加迅速地适应周围的环境。
美国布朗大学的科学家分析,这完全是让发出的声音与回声相匹配的问题,蝙蝠们无视或者不处理那些容易产生干扰的东西,而只是去认真专注地做好不同频率的回声匹配。
实验进一步发现,蝙蝠需要许多关于地形的数据,但是第一次的回音却不足以提供足够的信息,所以它需要发送第二、第三乃至第四束声音。
而令人神奇的是:通过细微地改变噪声间距,蝙蝠可以区分不同的声音,最后大脑整合出一个此处地形的3D地图。
在实验中,科研人员制作出了一个3D模拟模型,科学家及实验室负责人推断,变换频率的技巧是蝙蝠们能够在快速飞行中正确定位的一个方法。
目前,科学家正在努力把这种回声定位方法应用到实践中,特别是希望能够成为一种尖端的军事技术。
我国成功研制新代彩色墨粉目前,从无锡美灵数码科技有限公司传来好消息,该公司科研团队经过5年不懈努力,终于打破国外在彩色墨粉技术上的封锁,成功研制出世界新一代彩色墨粉。
“此科研成果实现产业化后,将打破来自日本、美国等国外公司对中国市场的垄断,并将创造巨大的经济与社会效益。
基于超声波的跟踪定位系统研究

基于超声波的跟踪定位系统研究在现代社会中,人们需要对移动物体进行实时追踪和定位,以便于进行相关监测和控制操作。
为了实现这个目标,基于超声波的跟踪定位系统成为了一个被广泛研究的领域。
这篇文章主要探讨了基于超声波的跟踪定位系统的研究,包括定位原理、系统设计、算法实现和应用领域等方面。
一、定位原理基于超声波的跟踪定位系统是一种利用声波在空气中的变化进行测距、定位和追踪的技术。
声波是一种机械波,它能够在空气中传播,并在遇到不同密度的物体时发生反射、折射和散射等现象。
这为声波跟踪定位提供了基础条件。
在这种系统中,如何采集声波信号并从中获取有用的信息是至关重要的。
定位原理的核心是测量声波传播的时间差。
在系统中,一组发射器和接收器被放置在目标区域内。
这些发射器将超声波信号发送到目标物体,接收器接收到物体反射回来的声波。
通过测量发射和接收的时间差,可以确定目标物体与接收器之间的距离。
当有多组发射器和接收器组成网络时,可以利用三角定位法计算目标物体的位置。
二、系统设计基于超声波的跟踪定位系统由以下几个部分组成:1. 发射器:负责发射超声波,通常使用压电材料来产生机械振动引起声波发射。
2. 接收器:负责接收目标物体反射回来的声波,并将其转化为电信号。
通常采用压电材料来产生电信号。
3. 时间测量器:负责测量发射器和接收器之间的时间差来确定目标物体与接收器之间的距离。
4. 数据处理器:负责实现测距数据的处理,包括三角定位法的计算。
5. 软件界面:提供用户接口和数据输出,通常使用图形化界面。
三、算法实现基于超声波的跟踪定位系统通常采用三角定位法来计算目标物体的位置。
三角定位法是利用目标物体与多个发射器/接收器之间的距离来计算目标物体在平面或空间中的位置的一种方法。
当目标物体与三个以上的发射器/接收器配对时,可以通过计算交点来确定目标物体的位置。
交点是所有发射器/接收器之间连线的交点,它是目标物体在平面/空间中的位置。
四、应用领域基于超声波的跟踪定位系统具有广泛的应用场景,包括物流、工业生产、医疗、安全等领域。
超声波定位系统的设计
己昨 巨 月 第己 日 卷 第巳 期
目 标节点 矽 倒 超声 波信号停 止定时器 取出定 时器中 数值送 到上位
机
的 法 据 目 上 三 定维 位 标 计 位坐 机 节 算 出 算 根 点
目 标节 点启动
定时器
图
定位系统的流程图
节点的硬件设计
微处理器模块
微处理器采 用 公司的 微处理
单片机产生 的信号进行放大 再将放大了的信号加载于超
接 口是 用 于对 程 序 的下 载 , 设 计 中采 用 标 准 的 接 口座 , 以此方便仿真器的使用 。串 口通信模块接 单片机的串行通信 口 , 并采用 样使整个无线节点能方便地工作在
系统 的功耗 。
通信
低功耗芯 片 , 这 下 ,进一步降低 了
引脚提供时钟频率 , 通过
同步性 ,在接收和发送时 ,保证
一
瀚 麟 皱麟 熟 耀 翼 蒸 黝 黝 黝 燕鬃 缨 撇 瓢
撬 影
应 用 天
十 的 串 口接 收 控 件
在数据接收部分 , 用
传感器节点定位过程中 , 未知节点在获得对于临近信 标节点的距离后 ,通常使用三边测量法计算 自己的位置 。 已知 、 、 三个节 点的坐标分别为 。 , 。, 。 、 、, 。, 。、 。 , 。 , 。 , 以及它们 到未知节点 的距离 分别为 。 ,氏 , 。 , 假设节点 的坐标为 , , 。 那么 ,存在以下公式 一 一几 十 一 。 一 。 一 。 少 一夕 一 一气 一武 一跳 一 磷 能 。使
一
寇海洲 基于超声波的定位系统研究与实现
定时器 中的 并发给上位
叨
定时器中的 并发给上位
开中断
曰 习 ﹁ 尸 ︻ 气 匕 连 了 ︻ 占 丹 一 口
基于超声波的定位系统设计
基于超声波的定位系统设计超声波定位系统是一种常用的室内定位系统,其原理是利用超声波传感器发送和接收超声波信号,通过测量超声波传播时间和强度来确定目标的位置。
在本文中,我将设计一个基于超声波的定位系统,包括硬件和软件方面的内容。
硬件设计部分包括传感器选择和电路设计。
我们可以选择超声波传感器模块,这种模块通常包括超声波发射器和接收器。
我们需要选择一个频率合适的超声波发射器,通常在40kHz附近。
接收器可以选择带有放大器和滤波器的模块,以增强接收到的信号,并去除噪音。
接收到的信号可以通过微控制器进行处理和分析。
在电路设计方面,我们需要考虑超声波传感器模块的电源供应和信号处理。
我们可以使用电池或者直流电源作为电源供应,但要确保电源电压稳定。
对于信号处理,我们可以使用放大器来增强接收到的信号,然后通过滤波器去除噪音。
接收到的信号可以通过模数转换器转换成数字信号,以便进行后续的处理和分析。
软件设计部分包括信号处理和定位算法。
在信号处理方面,我们需要对接收到的信号进行滤波和去噪处理。
可以使用数字滤波器来去除噪音,并使用算法来分析信号的幅值和延迟。
接收到的信号可以通过相关分析或者时间差法来确定目标的距离和方向。
在定位算法方面,我们可以使用多普勒效应或者三角定位法。
多普勒效应可以通过测量频率变化来确定目标的速度和方向。
三角定位法可以利用多个超声波传感器的位置信息来确定目标的位置。
使用最小二乘法或者粒子滤波等算法可以提高定位的准确度和稳定性。
此外,我们还可以考虑加入实时定位和地图显示功能。
通过添加无线通信模块,可以将目标位置实时传输到显示设备上,并在地图上显示目标位置。
这样用户可以通过显示设备来方便地追踪目标位置。
总结来说,基于超声波的定位系统设计需要考虑硬件和软件方面的内容。
硬件设计部分包括传感器选择和电路设计。
软件设计部分包括信号处理和定位算法的设计。
通过合理的硬件设计和优化的软件算法,我们可以设计出一套准确、稳定的基于超声波的定位系统。
基于超声波的定位系统研究与实现

传感器技术、微机电系统、现代网络和无线电通信等技术的进步,推动了无线传感器网络的产生和发展。
无线传感器网络具有广阔的应用前景,能应用于军事国防、工农业控制、城市管理、生物医疗、环境定位、抢险救灾、危险区域远程控制等诸多领域。
超声波定位的原理与无线电定位系统相仿,只是由于超声波在空气中的衰减较大,只适用于较小的范围。
超声波在空气中的传播距离一般只有几十米。
短距离的超声波测距系统已经在实际中应用,测距精度为厘米级。
超声波定位系统可用于无人车间等场所中的移动物体定位。
1 超声检测原理1.1 回波信号超声检测信号分析系统的原理是通过超声检测仪和信号采样装置及计算机的相互协调,实现超声检测电信号的模数转换,并完成检测数据的存储,计算机根据己量化的回波信号数据,利用有关理论及技术作相应处理。
超声检测是一种物理手段,利用超声波的性质来判断目标的距离。
是根据超声波在检测区域内运动时遇到界面反射所呈现的特征来判断物体位置状况的无损检测方法。
超声波检测中常用技术是把超声波短脉冲发送至被测物体,当声波自物体的非连续性结构或边界返回时,获取其回波波形。
当波触及物体前壁面时,有几个振荡周期的窄带随机波产生,称为始波,与此同时,还有一部分超声波渗入被测物体,触及物体的后壁面,又可得到振荡的回波,称为底波。
利用始底波之间的时间间隔与己知的声波在物体中的速度,便可算出物体的距离。
同样,当声波触及被测物体内的气孔、杂质等非连续性目标位置时,也会产生回波,据此得出目标位置的信息,如目标位置在检测区域内的大致位置性质等。
1.2 模型的建立超声波检测中所处理的是振荡波,具有窄带随机信号的特性。
传统的超声波检测设备采取硬件检波的方法提取回波包络,检测精度和主峰位置的精确定位都无法保证。
由于目标回波位置直接决定了测量精度,尤其对运动目标,如何精确测定出回波位置是技术的关键所在。
本文介绍的信号采集系统包括传感器信号采集设计及传感器与MOTE之间信息传递的硬件设计与构造。
基于超声波定位系统的设计
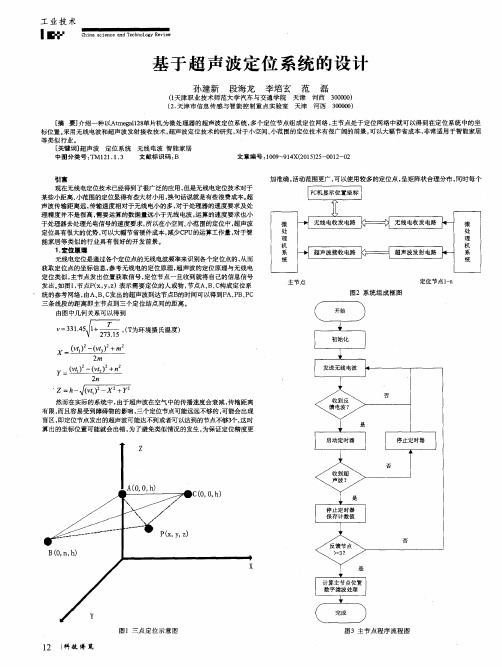
无 线电定位 是通过各 个定位 点的无 线 电波频 率来识 别各个定 位点 的 , 从 而 获 取定 位点 的坐 标信息 , 参 考无 线 电的定 位原理 , 超 声 波的定 位原 理与 无线 电 定 位类 似 , 主节 点发 出位置 获 取信号 , 定位节 点一 旦收 到就将 自己的信 息信 号 发出。 如图I , 节点P ( x, y, z ) 表 示需 要定 位 的人 或物 , 节 点A、 B、 C 构成 定位 系 统 的参 考 网络 , 由A、 B 、 C 发 出 的超声波 到达 节点 B 的时 间可 以得到P A、 P B、 P C 三 条 线段 的距 离 即主节 点到 三个 定 位结点 间 的距 离 。
工 业 技 术
l ■
C h i n a s c i e n c e a n d T e c h n o l o g y R e v i e w
基 于 超 声 波定 位 系 统 的 设 计
孙建新 段海 龙 李培玄 范 磊
( 1 天 津职 业 技 术师 范大 学 汽 车与 交通 学 院 天津 河 西 3 0 0 0 0 0 ) ( 2 . 天津 市信 息传 感 与智 能 控制 重 点实 验 室 天津 河西 3 0 0 0 0 0 ) [ 摘 要】 介 绍一 种 以A t me g a l 1 2 8 单片机 为微 处理 器 的超声 波 定位 系统 , 多个 定位 节点 组成 定位 网络 , 主节 点处于 定 位 网络 中就 可以得 到在 定 位系 统 中的 坐 标位置 。 采用 无线 电波和超 声波 发射接 收技 术 , 超声波 定位 技术 的研究 , 对 于小 空间 、 小 范 围的定位 技术有 很广 阔的前 景 , 可 以大幅节 省成 本 , 非常 适用 于智 能家居
基于超声波技术的智能室内定位研究

基于超声波技术的智能室内定位研究随着智能家居技术的不断进步,越来越多的人开始关注室内定位。
智能室内定位技术可以为人们提供更多便利,使室内生活更加舒适。
目前,基于超声波技术的室内定位系统已经得到广泛应用,成为研究热点之一。
一、超声波技术与室内定位超声波技术是一种非常先进的测量技术,能够在两个点之间传输信息。
它可以被用于声学测量、控制、定位、人机交互、检测和安全领域,其中最为重要的一个应用就是室内定位。
超声波技术的优点在于其信号强、传输距离长,能够覆盖更广的室内范围。
它可以通过改变超声波的频率、振幅、相位等来实现不同的室内定位功能,因此被广泛应用于各种不同的室内定位系统中。
二、基于超声波技术的室内定位系统基于超声波技术的室内定位系统主要有三个方面的应用:超声波传感、超声波定位和超声波导航。
下面将分别对这三个方面的应用进行阐述。
超声波传感:超声波传感器是基于超声波技术的传感器,它可以探测到物体的距离、方向和速度等信息。
使用超声波传感器可以让智能设备更加灵活和便利,可以实现人机交互、自动控制等功能。
超声波传感器被广泛应用于各种室内定位系统,包括智能家居、智能门锁等。
超声波定位:超声波定位是通过测量超声波的传输时间和信号强度来进行室内定位。
超声波定位可以提供高精度、高准确性的定位信息,可以实现单室内或多室内的定位需求。
超声波定位被广泛应用于室内导航、智能家居等领域,为人们的生活带来了更多便利。
超声波导航:超声波导航是一种基于超声波技术的室内导航系统,它可以为使用者提供更准确、更快速的导航信息。
超声波导航系统可以通过声波反射和声纹识别等技术来实现室内导航,帮助人们更好地掌握室内环境,使人们的室内生活更加方便。
三、基于超声波技术的室内定位系统应用案例1.智能门锁:智能门锁是基于超声波技术的一种室内定位系统,它可以通过超声波传感器探测人体距离门锁的距离和方向,从而实现远程开门和关门的功能。
使用智能门锁既方便又安全,而且在实际应用中被证明是非常可靠的。
高精度超声波室内定位系统的设计
• 113•高精度超声波室内定位系统的设计浙江清华长三角研究院 潘丽杰 徐本亮 赵 飞【摘要】随着智能化的不断普及,业内对于高精度高可靠的室内定位技术的需求越来越迫切。
本文通过对超声波定位技术的改进研究,设计了一种基于超声波传感器的高精度定位系统。
通过改造超声波发射头,采用多个发射头呈花瓣状布置,同时每个接收头往中心区域倾斜45度,实现更大覆盖范围。
使用Si4432无线透传模块实现数据通信和时间同步,采用TOA算法计算定位点和节点间的距离,通过三点定位法求得目标点坐标,并通过数据筛选和均值滤波获得更稳定更高精度的定位结果。
【关键词】超声波;室内定位;TOA;高精度;三点定位法;无线透传A Design of High Accuracy Ultrasonic Indoor Positioning SystemPAN Li-jie1,XU Ben-liang1,ZHAO Fei1(Yangtze Delta Region Institute of Tsinghua University,Zhejiang,JiaXing,314000)Abstract:With the continuous popularization of intelligence,the demand for high-precision and highly reliable indoor positioning technology has become increasingly urgent.In this paper,through the improvement of ultrasonic positioning technol-ogy,a high-precision positioning system based on ultrasonic sensors is designed. By transforming the ultrasonic transmitter head,multiple emitters are arranged in a petal shape,and each receiver head is inclined 45 degrees to the center area to achieve a greater ing Si4432 wireless transmission module to achieve data communication and time synchronization,the use of TOA algorithm to calcu-late the distance between the positioning point and the node,through the three-point positioning method to obtain the target point coordinates,and through data filtering and mean filtering to obtain a more stable and high precision Positioning results. Key words:ultrasonic;indoor positioning;TOA;high-precision;three-point positioning method0 引言室内环境中,定位信号在传播过程中容易受到墙体、人体和物体等的遮挡,信号会发生严重的损耗,因此目前成熟的室外定位技术如GPS定位,无法应用于室内环境。
基于CDMA室内超声波三维定位系统设计设计
编号本科生毕业设计基于CDMA室内超声波三维定位系统设计CDMA-based indoor ultrasonic three-dimensionalpositioning system design摘要本系统结合射频通信低成本、低功耗的特点和超声波定位精度高的特点,而避开它们的缺点,如单独的射频识别定位精度不高、超声波测距的覆盖范围有限。
提出了一种基于CDMA室内超声波三维定位系统,能达到较高的定位实时性和厘米级的定位精度。
本系统具有快速定位和定位精度高等优点,并且能实现多个移动目标节点的定位,使多目标同时定位或导航的应用成为可能,特别适用于多目标的室内协同工作,如井下人员的精确定位、医疗监护、远动捕获以及室内无人机和机器人的航迹规划等。
关键词:CDMA 三维动态定位射频同步超声波ABSTRACTThe system combines the advantages of the radio frequency communications such as low-cost, low power consumption and high precision of the ultrasonic positioning. while avoiding their disadvantages, such as separate radio frequency identification accuracy is not high, the limited coverage of ultrasonic ranging. We proposed a three-dimensional indoor ultrasonic positioning system that base on CDMA technology. It can achieve high localization and real-time centimeter-level positioning accuracy. The system is fast positioning and high precision positioning The system can achieve the positioning of multiple mobile target nodes, so that multi-objective positioning or navigation applications also become possible, especially for the multi-objective work in the room, such as the precise location of the underground personnel, medical care, capture the remote object, indoor UAV,and paining the path of the robot and so on.Key words:CDMA;Three-dimensional dynamic;RF synchronization;Ultrasonic目录摘要 (I)ABSTRACT (II)目录 (III)第1章绪论 (1)1.1课题研究目的和意义 (1)1.2国内外研究现状和前景分析 (1)1.2.1国内现状 (1)1.2.2国外现状 (2)1.2.3前景分析 (3)1.3本文主要研究内容 (3)第2章超声波定位原理 (4)2.1超声波定位系统实现方式及比较 (4)2.1.1超声波技术 (4)2.1.2超声波定位系统实现方式 (5)2.2超声波测距及定位算法 (5)2.2.1 TOA(到达时间)测距 (5)2.2.2 AOA(到达角度)测距 (6)2.2.3 TDOA(到达时间差)测距 (6)2.2.4 三边定位算法 (7)2.3超声波定位系统组成及工作原理 (9)第3章软件仿真 (12)3.1 CDMA(码分多址)技术 (12)3.2伪随机序列的产生 (12)3.3 m序列与超声载波的调制 (14)3.3.1 数字信号调制及其分类 (14)3.3.2 二进制振幅键控(2ASK) (14)3.3.3 2ASK仿真结果 (15)3.4 接收端载波解调 (16)3.4.1 2ASK解调器 (17)3.4.2 仿真结果 (17)第4章硬件设计 (20)4.1 中心站 (20)4.2 信标 (21)4.3 目标节点 (22)第5章实验结果分析 (25)5.1 实验数据分析 (25)5.2误差分析 (26)第6章总结与展望 (28)6.1 全文总结 (28)6.2展望 (28)致谢 (29)参考文献 (30)第1章绪论1.1课题研究目的和意义现今的“位置服务”领域非常的火热,但其大部分都是服务于户外移动用户。
基于ZigBee的室内超声波三维定位的研究的开题报告

基于ZigBee的室内超声波三维定位的研究的开题报告一、选题背景在现代社会中,室内定位技术被广泛应用于室内导航、室内监控、室内安全等方面。
目前,有很多种室内定位技术,如Wi-Fi定位、蓝牙定位、ZigBee定位、超声波定位等。
其中,超声波定位具有定位准确性高、定位误差小等优点,被广泛应用于室内定位领域。
本文将介绍基于ZigBee的室内超声波三维定位的研究。
ZigBee是一种低速、低功耗、低数据率的无线通信技术,被广泛应用于物联网中。
结合超声波定位技术,可以实现对室内物体的三维定位,用于室内环境监测、防盗报警、室内导航等方面。
二、研究目标本文旨在研究基于ZigBee的室内超声波三维定位技术,重点探讨以下问题:1.建立ZigBee通信网络,实现节点之间的通信;2.设计超声波发射器和接收器,获取超声波信号;3.实现超声波信号的处理、定位算法的设计和实现;4.实现实时定位功能。
三、研究内容1.ZigBee通信网络的建立ZigBee通信网络是基于地理位置信息的,它由多个节点组成,并通过无线通信协议进行通信。
在本文中,将通过ZigBee通信协议建立节点之间的通信网络,实现节点之间的通信和数据传输。
2.超声波发射器和接收器的设计超声波发射器和接收器是实现超声波定位的重要组成部分。
在本文中,将设计出可靠的超声波发射器和接收器,获取超声波信号,用于后续算法的实现。
3.超声波信号的处理、定位算法的设计和实现本文将通过对超声波信号的处理,提取超声波的时间、距离等信息,并设计和实现定位算法。
定位算法将根据超声波信号的时间、距离等信息,估计物体的位置坐标,实现超声波三维定位的功能。
4.实时定位功能的实现本文将实现实时定位功能,通过ZigBee通信网络将定位结果传输给用户。
用户可以实时了解室内物体的位置信息,用于室内导航、环境监测、防盗报警等方面。
四、研究意义本文研究基于ZigBee的室内超声波三维定位技术,具有以下意义:1.提高室内定位的精度和可靠性,为室内导航、室内监控等应用提供技术支持;2.为物联网中基于超声波定位的应用提供技术支持;3.为室内环境监测、防盗报警等领域提供技术支持。
基于超声波技术的3D定位系统研制_李国华

#926#计算机测量与控制.2005.13(9) Computer Measurement &Control工业控制收稿日期:2004-12-10; 修回日期:2005-01-10。
基金项目:/十五0863重大基金资助项目(2003AA12331004);三星电子中国通信研究院资助项目。
作者简介:李国华(1968-),男,浙江省平湖市人,工程师,博士研究生,主要从事无线传感器网络和无线通信新技术的研究。
文章编号:1671-4598(2005)09-0926-03中图分类号:T N92;TB5 文献标识码:B基于超声波技术的3D 定位系统研制李国华1,刘宝玲2,沈树群1(1.北京邮电大学电子工程学院,北京 100876; 2.北京邮电大学无线新技术研究室,北京 100876)摘要:精确的位置信息是B3G 移动通信系统实现普适计算功能的要求,提供位置信息的系统必须是低成本、低电子复杂性、放置方便和多目标定位的;系统由中心节点、超声波接收传感器节点和超声波发射信标节点通过无线通信链路构成定位网络;信标节点和多个传感器节点在中心节点通过无线通信链路的协同下分别测出超声波在它们之间的视距传播时间,进而依据已知的传感器节点位置和声速,利用最小二乘法计算出信标节点的位置;给出了本定位系统的组成框架、定位算法、基于nRF2401无线收发模块建立无线通信链路的M AC 协议和超声波收发时间差的修正方案;本定位系统达到了设计目标,实验结果表明定位精度也满足应用要求。
关键词:定位网络;超声波定位;普适计算;无线电收发模块Research and Development of3-D Positioning System Based on the Ultrasound TechnologyLi Guohua 1,Liu Baoling 2,Shen Shuqun 1(1.Schoo l of Elect ronic Engineering ,Beijing U niversit y of P osts and T eleco mmunications,Beijing 100876,China;2.W T I,Beijing U niversity of Posts and T elecommunications,Beijing 100876,China)Abstract:T he accurate location in formation provided by th e positioning system w ith low cost,low electronic com plex ity,east deploy -m ent and multi targets positioning capab ility is required by B3G for its u biquitous computing.T he system consis ts of the cen tr e node,the sen sor n od es w ith u ltras ound receiver and th e b eacon nodes w ith u ltras ound emitter.W ith the control of the centre node,th ese nodes netted by w ireless link measure the trans mission time of the ultrasound fr om the beacon to each s ens or.Th e b eacon position is obtained via LS E al -gorithm ,based on the k nown position s of sensors and th e meas urem ents.T he architectu re of this sys tem,the positioning algorithm,the M AC protocol of w ireless link organized by the nRF2401transceiver s,and a smart meth od to calibrate the trans mission tim e of th e ultra -s ound are pr esented.T his system m eets the target specification of design,and experiments show the accuracy of positionin g m eets the re -quirement of application.Key words:sen sor n etw orks;ultrasoun d positionin g technology;ub iqu itou s computing;radio transceiver chip0 引言随着计算机技术和无线电通信技术的发展,普适计算(U biquit ous co mputing)将被应用在各种领域,融入到人们的日常生活中,提高人们的生活质量和水平。
一种超声波三维定位系统的研究

第 8期
秦军 等 : 一种超声波三维定位系统的研究
·2 11 ·
器 , 并在 CPLD 里构造了先入先出 ( F IFO ) 、直接存 贮器存取 (DMA ) 和并行通信 3 个功能模块 , 以满 足采样要求 。
( 2) 测量软件 图 6为测量软件的流程图 , 软件采用 VB610 结 合 Matlab615数字信号处理函数进行编程 , 以保证算 法的有效性和可靠性 。
MACH INE TOOL & HYDRAUL ICS
Aug12008 Vol136 No18
一种超声波三维定位系统的研究
秦军 , 龙建军 , 吴百海
(广东工业大学机电学院 , 广东广州 510090)
摘要 : 针对深海采矿水下三维定位的需要 , 利用调幅超声波基阵原理 , 研究了一种对水下运动物体三维定位系统 , 建 立了模拟实验装置并进行了前期实验 。实验结果表明三维定位误差接近厘米级精度 , 验证了该系统的可行性 , 为工程实现 提供了技术原型 。
声波的相位差
为
φ 32
。当
目标位置满足远场
条
件
,
在
平面波模型下 , 根据空间几何关系有 :
x =λ2φπ32dL = L cosβ
y =λ2φπ12dL = L cosγ
其中 :
L
=
1 2
ct,
c为水中声速 ,
t为从发送信号到接
收信号的时间差 。
则在 x轴上的标准偏移误差 :
δ x
=
co s2βδL2
意 , 因此有必要找出产生误差的主要原因 , 并采取相 应的措施去解决 。下面就对产生误差的主要原因进行
分析 。
调幅超声波定位检测方程求目标的三维坐标的关
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 2 外部网络发起的定位请求图
3 定位网络的设计实现
鉴于低成本和小型化的需要 , 本系统选用 No rdic VL SI 公 司的单片无线收发模块 nRF2401[6] 构成定位网络 。该模块工作 在 21 4~21 5 GHz 的 ISM 频段上 , 典型输出功率为 0 dBm , 接 收灵敏度 - 90 dB , 无线传输距离为 30~40 m , 这与超声波 20 m 左右的测距能力相当 。该模块是收/ 发半双工的 , 总共 125 个频道 , 频道可以编程设置 , 频道间隔 1 M Hz , 频道切换时间 < 200μs , 还可以对在同频道上工作的模块进行编址 。支持 ShockBurst 工作模式 , 也即利用片上 FIFO , 无线收/ 发的数据 速率可达 1 Mb/ s , 而无线收/ 发模块与 MCU 的数据交换速率 可以是低速的 , 如 10 Kb/ s , 这样做的好处是减少了无线电发 射时间 , 降低了能耗和无线电发生空中冲突的机会 , 另外也降 低了 MCU 的速度要求 。模块还支持 DuoCeiver 模式 , 通过一 根天线同时接收两个频道的数据 (第一个频道可收可发 , 设为 CH1 ; 第二个频道只收不发 , 且必为 CH2 = C H1 + 8M Hz) , 并且两路数据独立地以三线制方式 (3 - wire) 输出 。其它参 数和功能参见文献 [ 6 ] 。
V t i = ( x i - x) 2 + ( yi - y) 2 + ( z i - z) 2 ( m)
(1 < i < n ,且 n ≥4)
(2)
很明显式 (2) 是一组非线性超定方程 , 可以用最小二乘
法求被定位物体的三维坐标估计值
n
∑ ~ ~ ~
( x , y , z) = arg min x, y,z
工业控制
基于超声波技术的 3D 定位系统研制
李国华1 , 刘宝玲2 , 沈树群1
(1. 北京邮电大学 电子工程学院 , 北京 100876 ; 2. 北京邮电大学 无线新技术研究室 , 北京 100876)
摘要 : 精确的位置信息是 B3 G 移动通信系统实现普适计算功能的要求 , 提供位置信息的系统必须是低成本 、低电子复杂性 、放置 方便和多目标定位的 ; 系统由中心节点 、超声波接收传感器节点和超声波发射信标节点通过无线通信链路构成定位网络 ; 信标节点和多 个传感器节点在中心节点通过无线通信链路的协同下分别测出超声波在它们之间的视距传播时间 , 进而依据已知的传感器节点位置和声 速 , 利用最小二乘法计算出信标节点的位置 ; 给出了本定位系统的组成框架 、定位算法 、基于 nRF2401 无线收发模块建立无线通信链 路的 MAC 协议和超声波收发时间差的修正方案 ; 本定位系统达到了设计目标 , 实验结果表明定位精度也满足应用要求 。
图 3 被定位物体发起的定位请求示意图
无论是谁发起的定位请求 , 当中心节点收到定位请求后 , 马上以广播方式发布定位公告 (内容包含被定位物体的 ID 和 发起源标志) 。超声波信标节点收到与其所附物体相同 ID 的定 位公告后 , 马上发射超声波信标 。而传感器节点 i ( 1 ≤i ≤n) 在收到定位公告后 , 启动计时器和接收超声波信号 ; 一旦接收 到超声波信号 , 马上停止计时器 , 此刻计时器对应的时间 ti 就 是该传感器节点测得的超声波收发时间差 。每个传感器节点把 它测得的时间差发送给中心节点 , 由中心节点完成定位计算 。
Key words : sensor net works ; ult rasound positioning technology ; ubiquitous co mp uting ; radio t ransceiver chip
0 引言
随着计 算 机 技 术 和无 线 电 通 信 技 术 的 发 展 , 普 适 计 算 (U biquitous comp uting) 将被应用在各种领域 , 融入到人们的 日常生活中 , 提高人们的生活质量和水平 。普适计算的一个前 提条件是必须获取普适计算对象的位置信息[1] , 这个位置信息 依据普适计算的不同具体应用 , 可以是基于区域范围的 , 也可 以是基于精确坐标的 。在 B3 G (第三代以后的移动通信系统) 中也同样面临着普适计算的需求 : 如果 B3 G 网络得到了 B3 G 用户移动终端的精 确 位 置 信 息后 , 将 提 供 给 B3 G 用 户 基 于 Smart Office 和 Smart Home 理念的多种新业务 。
图 4 定位网络的 MAC 示意图
依据无线收发模块以上所述的功能和参数以及本定位系统 所要达到的功能 , 本定位网络的网络层采用简单的单跳通信 (包括上行和下行) , 因此网络层相对比较简单 ; 而由于收发模 块的半双工工作模式和无线电信道的竞争 , 本系统的媒体介入 层 (MAC) 较复杂 , 如图 4 所示 。
有很多定位技术都可以对物体进行定位 , 但适合普适计算 要求的 、对多个移动物体精确定位的 、系统电子复杂性[2 - 3] 低 的技术却并不多 。B3 G 中普适计算[4] 的环境一般是在室内 , 并 且要求定位精度达到厘米级 , 定位系统必须是很方便在空间布 置 , 也必须很容易使 B3 G 网络的控制平面接入 , 并获取相应
(1. School of Elect ronic Engineering , Beijing University of Po st s and Teleco mmunicatio ns , Beijing 100876 , China ; 2. W TI , Beijing University of Po st s and Teleco mmunicatio ns , Beijing 100876 , China)
关键词 : 定位网络 ; 超声波定位 ; 普适计算 ; 无线电收发模块
Research and Development of 3 - D Positioning System Based on the Ultrasound Technology
Li Guo hua1 , Liu Baoling2 , Shen Shuqun1
的位置信息 。基于超声波的 3D 定位技术是一种可行的 、适合 B3 G 移动终端普适计算要求的定位技术 。本系统的特点是电子 系统复杂性低 , 实现容易和成本低 ; 定位精度高 , 容错性能 好 ; 定位信标体积小 , 可以附着在任何需要定位的移动或不移 动物体上 ; 按需定位 , 能量效率好 ; 除了被定位物体策动定位 请求外 , 还允许外部网络策动定位请求和监控被定位物体 。
2 定位算法
定位算法是在定位网络的中心节点中完成的 。超声波的传 播速度为
V = 331. 45
1
+
T 273. 15
( m/
s)
ቤተ መጻሕፍቲ ባይዱ
(1)
其中 T 为环境摄氏温度 。假定被定位物体的三维坐标为 ( x ,
y , z) 和至少有 4 个传感器节点不在同一平面上 , 则被定位物
体到传感器节点 的距离[5] 为
·926 ·
计算机测量与控制 . 2 0 0 5 . 1 3 ( 9 ) Computer Measurement & Control
文章编号 :1671 - 4598 (2005) 09 - 0926 - 03 中图分类号 : TN92 ; TB5 文献标识码 :B