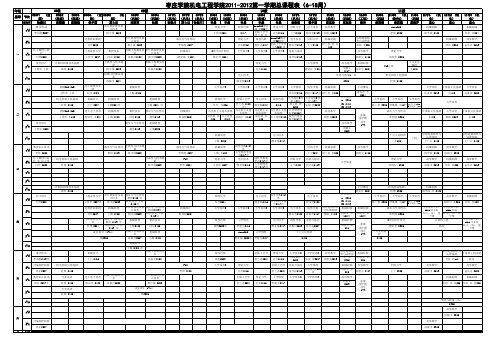
《控制工程》教学进度表2011-2012 第1学期
2011-2012学年第1学期通识教育选修课课程归属对照

2
课程性质 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 经济管理选修课 任意选修课 人文艺术社科选修课 工程技术选修课 人文艺术社科选修课 工程技术选修课 经济管理选修课 经济管理选修课 通识教育理工学生限选 人文艺术社科选修课 人文艺术社科选修课 人文艺术社科选修课 经济管理选修课 人文艺术社科选修课 经济管理选修课 经济管理选修课 经济管理选修课 人文艺术社科选修课 人文艺术社科选修课 通识教育任意选修 通识教育任意选修 通识教育任意选修 通识教育任意选修 人文艺术社科选修课 人文艺术社科选修课 人文艺术社科选修课 人文艺术社科选修课 工程技术选修课 工程技术选修课 工程技术选修课 经济管理选修课 人文艺术社科选修课 体育选修课 体育选修课
1
课程性质 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课 通识教育选修课
中南大学控制类本科生教学进程表(2008修订版)自动化、测控、电气、智能

自动化专业指导性学历符号说明:⊙军训及入学教育·理论教学∶考试= 假期○实习※设计⊗综合实验、计算机实践+ 制造工程训练△公益劳动/ 学年论文廿社会实践(调查) ▲科研训练║毕业设计(论文)√毕业教育* 学术活动¤课外研学1自动化专业指导性教学进程表续表续表续表续表电气工程及其自动化专业指导性学历符号说明:⊙军训及入学教育·理论教学∶考试= 假期○实习※设计⊗综合实验、计算机实践+ 制造工程训练△公益劳动/ 学年论文廿社会实践(调查) ▲科研训练║毕业设计(论文)√毕业教育* 学术活动¤课外研学7电气工程及其自动化专业指导性教学进程表续表续表测控技术与仪器专业指导性学历符号说明:⊙军训及入学教育·理论教学∶考试= 假期○实习※设计 综合实验、计算机实践+ 制造工程训练△公益劳动/ 学年论文廿社会实践(调查) ▲科研训练║毕业设计(论文)√毕业教育* 学术活动¤课外研学13测控技术与仪器专业指导性教学进程表智能科学与技术专业指导性学历符号说明:⊙军训及入学教育·理论教学∶考试= 假期○实习※设计 综合实验、计算机实践+ 制造工程训练△公益劳动/ 学年论文廿社会实践(调查) ▲科研训练║毕业设计(论文)√毕业教育×机动注意:寒假统一安排5周,暑假原则上安排7周。
集中实践或集中教学环节一般与暑假统筹安排,寒假原则上不安排集中实践教学环节。
第2学期计算机程序设计实践,2周,分散进行。
第3学期第1周,专业导论,16学时;第2~3周制造工程训练II第4学期第18~19周,电子技术课程设计I;第20周,认识实习;电工电子实践II,1周,分散进行。
第5学期微机原理及接口技术:1~3周开课;微机应用系统设计与综合实验,2周,分散进行。
第6学期第18~19周,人工智能课程设计;第20~22周,生产实习。
第7学期计算机仿真技术:1~3周开课;计算机仿真技术课程设计,2周,智能系统工程训练,2周,分散进行。
《控制工程导论》教学大纲
《控制工程导论》课程教学大纲英文名称:Introduction to Control Engineering 课程代码:1121242002课程性质:专业方向课学分/学时:1.0学分/24学时先修课程:后续课程:控制工程、毕业设计开课学期:春季学期开课单位:信息工程学院适用专业:自动化专业一、课程性质与任务《控制工程导论》是自动化专业的一门主要专业课控制工程的前导必修课程。
本课程主要从实际工业工程概念出发,引申到控制工程基本概念,介绍过程领域控制工程基本内容基本流程及主要组成部分,介绍控制系统的起源现状和未来,并讲解控制工程的基础知识、基本内容和理论组成;介绍了DCS、PLC控制系统、现场仪表等控制工程的物理组成内容,最后以实际化工工程为例,形象介绍控制工程的实际组成、内容、实施过程,,并以实际过程案例介绍控制工程的组成和实施过程,其中,包括先进控制项目,通过本课程的学习,了解控制工程如何在实际中应用,激发学生对本专业知识的认知、兴趣、了解要学好专业知识所必须学习的公共基础课、专业基础课及相关专业课,明确自动化专业研究方向和就业方向等的问题。
二、课程目标与要求1. 本课程支撑的毕业要求本课程主要支撑的毕业要求为:1.3 掌握工程原理,具有自动控制系统认知及系统思维的能力;3.3 PLC、DCS控制系统组态、软件设计与调试能力;7.2 工程实践的历史和文化背景。
2.本课程拟达到的特定教学目标(1)使学生对控制工程内容有初步了解,了解本专业领域需要的工程基础知识、工程背景,激发学生对控制工程实践的学习兴趣;(2)通过导论学习,使学生了解PLC、DCS及自动化仪表、电力电子技术等方面知识在实际工程中的价值,进一步明确下一步学习方向;(3)阐述自动控制系统的基本知识、内容及涉及领域,培养学生系统思维能力。
三、教学内容、教学方法、教学要求与学时分配课程最后成绩=平时成绩+ 70%考试成绩。
五、参考书[1] 戴先中主编,《自动化学科概论》(第2版),高等教育出版社,2016年。
教学进度计划表(最新模板)

教学进度计划表(最新模板)一、教学进度计划表概述1. 课程名称:填写所教授的课程名称。
2. 教师姓名:填写授课教师的姓名。
3. 学期:填写当前学期。
4. 班级:填写授课班级。
5. 教学目标:根据教学大纲,明确本课程的教学目标。
6. 教学内容:列出每节课的教学内容,包括知识点、技能点等。
7. 教学方法:根据教学内容,选择合适的教学方法,如讲授、讨论、实验等。
8. 教学资源:列出所需的教学资源,如教材、课件、实验器材等。
9. 评估方式:确定每节课的评估方式,如课堂提问、作业、考试等。
10. 日期:填写每节课的日期。
二、教学进度计划表制定流程1. 分析教学大纲:根据教学大纲,明确本课程的教学目标和要求。
2. 确定教学进度:根据教学目标和要求,合理安排教学进度,确保教学内容的完整性和连贯性。
3. 设计教学内容:根据教学进度,设计每节课的教学内容,包括知识点、技能点等。
4. 选择教学方法:根据教学内容,选择合适的教学方法,如讲授、讨论、实验等。
5. 准备教学资源:根据教学内容和教学方法,准备所需的教学资源,如教材、课件、实验器材等。
6. 制定评估方式:确定每节课的评估方式,如课堂提问、作业、考试等。
7. 编制教学进度计划表:将课程名称、教师姓名、学期、班级、教学目标、教学内容、教学方法、教学资源、评估方式、日期等信息汇总,形成教学进度计划表。
8. 审核和调整:对教学进度计划表进行审核,确保其合理性和可行性,如有需要,进行相应调整。
三、教学进度计划表实施与监控1. 教学进度计划实施:按照教学进度计划表,进行教学内容的讲授和教学活动的组织。
2. 教学资源准备:根据教学进度计划表,提前准备好所需的教学资源。
3. 评估与反馈:根据教学进度计划表,进行教学评估,收集学生反馈,及时调整教学策略。
4. 沟通与协调:与相关部门和人员保持沟通,确保教学进度计划的有效实施。
通过制定和实施教学进度计划表,有助于教师合理安排教学内容,提高教学效果,实现教学目标。
2014-2015控制工程第一学期课程表
5 6
பைடு நூலகம்
信息检 索与知 识产权 (716)
5-108 数值分 析 (317) 董玉林
张福俊
(单) 5-203 随机过 程 (310) 张维海 (5-108) DSP应 用系统 设计 (1219) 张仁彦 5-108/5211 5-202 嵌入式 系统 (310) 黄梁松
下
教 室 7 8
现代电 力电子 技术 (310) 张开如
现代控 制理论 (920) 刘秀芝
三
现代电 力电子 技术 (310) 张开如
四
现代控 制理论 (920) 刘秀芝
五
矩阵理 论 (3-13) 王新增
六
日
上
午
教 室 3 4
5-211 翻译基 础 (320) 李成明 5-203
5-211
5-211 传感器 理论与 技术 (1219) 程学珍
5-203 数值分 析 (317) 董玉林 5-203 自然辩 证法概 论 (7-16) 王耀东
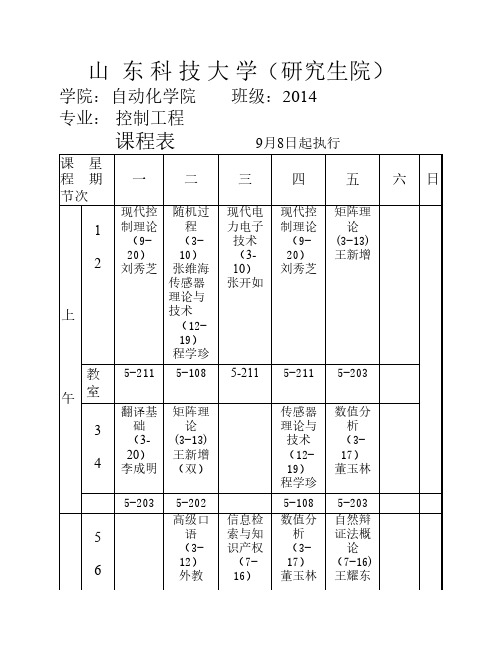
山 东 科 技 大 学(研究生院)
学院:自动化学院 专业: 控制工程 班级:2014
9月8日起执行 二
随机过 程 (310) 张维海 传感器 理论与 技术 (1219) 程学珍 5-108 矩阵理 论 (3-13) 王新增 (双) 5-202 高级口 语 (312) 外教
课程表
课 星 程 期 节次 1 2 一
5-105
5-202 嵌入式 系统 (310) 黄梁松 DSP应 用系统 设计 (1219) 张仁彦 5-211
午
教 室 晚 上 9 10 教 室
5-211
5-211
《控制工程基础》电子教案
《控制工程基础》电子教案第一章:绪论1.1 课程介绍解释控制工程的定义、目的和重要性概述控制工程的应用领域和学科范围1.2 控制系统的基本概念介绍控制系统的定义和组成解释输入、输出、反馈和控制器的概念1.3 控制工程的历史和发展回顾控制工程的发展历程和重要里程碑讨论现代控制工程的挑战和发展趋势第二章:数学基础2.1 线性代数介绍矩阵、向量的基本运算和性质讲解线性方程组的求解方法2.2 微积分复习微积分的基本概念和公式讲解导数和积分的应用2.3 离散时间信号介绍离散时间信号的定义和特点讲解离散时间信号的运算和处理方法第三章:连续控制系统3.1 连续控制系统的概述介绍连续控制系统的定义和特点解释连续控制系统的应用领域3.2 传递函数讲解传递函数的定义和性质介绍传递函数的绘制和分析方法3.3 控制器设计讲解PID控制器和模糊控制器的原理和方法讨论控制器设计的考虑因素和优化方法第四章:离散控制系统4.1 离散控制系统的概述介绍离散控制系统的定义和特点解释离散控制系统的应用领域4.2 差分方程和离散传递函数讲解差分方程的定义和求解方法介绍离散传递函数的定义和性质4.3 控制器设计讲解离散PID控制器和模糊控制器的原理和方法讨论控制器设计的考虑因素和优化方法第五章:状态空间方法5.1 状态空间模型的概述介绍状态空间模型的定义和特点解释状态空间模型的应用领域5.2 状态空间方程讲解状态空间方程的定义和求解方法介绍状态空间方程的稳定性分析5.3 状态控制器设计讲解状态控制器的原理和方法讨论状态控制器设计的考虑因素和优化方法第六章:频域分析6.1 频率响应介绍频率响应的定义和作用讲解频率响应的实验测量方法6.2 频率特性分析系统频率特性的性质和图形讨论频率特性对系统性能的影响6.3 滤波器设计讲解滤波器的基本类型和设计方法分析不同滤波器设计指标的选择和计算第七章:数字控制系统7.1 数字控制系统的概述介绍数字控制系统的定义和特点解释数字控制系统的应用领域7.2 数字控制器设计讲解Z变换和反变换的基本原理介绍数字PID控制器和模糊控制器的设计方法7.3 数字控制系统的仿真与实现讲解数字控制系统的仿真方法和技术讨论数字控制系统的实现和优化第八章:非线性控制系统8.1 非线性系统的概述介绍非线性系统的定义和特点解释非线性系统的应用领域8.2 非线性模型和分析方法讲解非线性系统的建模方法和分析技术分析非线性系统的稳定性和可控性8.3 非线性控制策略讲解非线性PID控制器和模糊控制器的原理和方法讨论非线性控制策略的设计和优化第九章:鲁棒控制9.1 鲁棒控制的概述介绍鲁棒控制的定义和目的解释鲁棒控制在控制工程中的应用领域9.2 鲁棒控制设计方法讲解鲁棒控制的基本设计和评估方法分析不同鲁棒控制策略的性能和特点9.3 鲁棒控制在实际系统中的应用讲解鲁棒控制在工业和航空航天等领域的应用案例讨论鲁棒控制在实际系统中的挑战和限制第十章:控制系统的设计与实践10.1 控制系统的设计流程讲解控制系统设计的基本流程和方法分析控制系统设计中的关键环节和技术选择10.2 控制系统实践案例分析不同控制系统实践案例的设计和实现过程讲解控制系统实践中的注意事项和优化方法10.3 控制系统的发展趋势讨论控制系统未来的发展方向和挑战分析新兴控制技术和方法在控制系统中的应用前景重点和难点解析重点环节1:控制系统的基本概念和组成控制系统定义和组成的理解输入、输出、反馈和控制器的相互作用重点环节2:传递函数和控制器设计传递函数的定义和性质PID控制器和模糊控制器的设计方法和应用重点环节3:差分方程和离散传递函数差分方程的求解方法离散传递函数的定义和性质重点环节4:状态空间模型的建立和分析状态空间方程的定义和求解状态空间模型的稳定性和可控性分析重点环节5:频率响应和滤波器设计频率响应的实验测量和分析滤波器设计方法和应用重点环节6:数字控制系统和控制器设计Z变换和反变换的应用数字PID控制器和模糊控制器的设计方法重点环节7:非线性系统的建模和控制策略非线性系统的建模方法非线性控制策略的设计和优化重点环节8:鲁棒控制的设计和评估鲁棒控制的基本设计和评估方法鲁棒控制策略的性能和特点重点环节9:控制系统的设计流程和实践案例控制系统设计的基本流程和方法控制系统实践案例的设计和实现过程重点环节10:控制系统的发展趋势和新兴技术控制系统未来的发展方向新兴控制技术和方法在控制系统中的应用前景本教案涵盖了控制工程基础的十个重点环节,包括控制系统的基本概念和组成、传递函数和控制器设计、差分方程和离散传递函数、状态空间模型的建立和分析、频率响应和滤波器设计、数字控制系统和控制器设计、非线性系统的建模和控制策略、鲁棒控制的设计和评估、控制系统的设计流程和实践案例以及控制系统的发展趋势和新兴技术。
《控制工程基础》电子教案
《控制工程基础》电子教案第一章:绪论1.1 课程介绍了解控制工程的概念、内容和研究方法理解控制工程在工程实践中的应用和重要性1.2 控制系统的基本概念定义系统、输入、输出和反馈区分开环系统和闭环系统1.3 控制工程的目标掌握稳定性、线性、非线性和时变性等控制系统的特性学习控制系统的设计方法和步骤第二章:数学基础2.1 线性代数基础掌握向量、矩阵和行列式的基本运算学习线性方程组和特征值、特征向量的求解方法2.2 微积分基础复习极限、连续性和微分、积分的基本概念和方法应用微积分解决实际问题2.3 复数基础了解复数的概念、代数表示法和几何表示法学习复数的运算规则和复数函数的性质第三章:控制系统分析3.1 传递函数定义传递函数的概念和性质学习传递函数的绘制和解析方法3.2 频率响应分析理解频率响应的概念和特点应用频率响应分析方法评估系统的性能3.3 根轨迹分析掌握根轨迹的概念和绘制方法分析根轨迹对系统稳定性的影响第四章:控制系统设计4.1 控制器设计方法学习PID控制器的设计原理和方法了解模糊控制器和神经网络控制器的设计方法4.2 控制器参数调整掌握控制器参数调整的目标和方法应用Ziegler-Nichols方法和频域方法进行参数调整4.3 系统校正和优化理解系统校正的概念和目的学习常用校正方法和优化技术第五章:现代控制理论5.1 状态空间描述了解状态空间的概念和表示方法学习状态空间方程的求解和状态反馈控制5.2 状态估计和最优控制掌握状态估计的概念和方法学习最优控制的目标和求解方法5.3 鲁棒控制和自适应控制理解鲁棒控制的概念和特点了解自适应控制的设计方法和应用场景第六章:线性系统的稳定性分析6.1 稳定性的定义和性质理解系统稳定性的概念和重要性学习稳定性分析的基本方法6.2 劳斯-赫尔维茨准则掌握劳斯-赫尔维茨准则的原理和应用应用劳斯-赫尔维茨准则判断系统的稳定性6.3 李雅普诺夫方法了解李雅普诺夫方法的原理和分类学习李雅普诺夫第一和第二方法判断系统的稳定性第七章:线性系统的控制器设计7.1 控制器设计概述理解控制器设计的目标和重要性学习控制器设计的基本方法7.2 PID控制器设计掌握PID控制器的设计原理和方法应用PID控制器进行系统控制7.3 状态反馈控制器设计了解状态反馈控制器的设计原理和方法学习状态反馈控制器的设计和应用第八章:非线性控制系统分析8.1 非线性系统概述理解非线性系统的概念和特点学习非线性系统分析的基本方法8.2 非线性系统的描述方法学习非线性系统的数学模型和描述方法应用非线性系统分析方法研究系统的性质8.3 非线性控制系统的应用了解非线性控制系统在工程实践中的应用学习非线性控制系统的设计和优化方法第九章:鲁棒控制理论9.1 鲁棒控制概述理解鲁棒控制的概念和重要性学习鲁棒控制的基本方法9.2 鲁棒控制设计方法掌握鲁棒控制设计的原则和方法应用鲁棒控制设计方法设计控制器9.3 鲁棒控制在控制系统中的应用了解鲁棒控制在实际控制系统中的应用学习鲁棒控制在控制系统中的设计和优化方法第十章:控制系统仿真与实验10.1 控制系统仿真概述理解控制系统仿真的概念和重要性学习控制系统仿真的基本方法10.2 MATLAB控制系统仿真掌握MATLAB控制系统仿真工具的使用应用MATLAB进行控制系统仿真和分析10.3 控制系统实验了解控制系统实验的目的和重要性学习控制系统实验的方法和技巧重点和难点解析重点环节1:控制系统的基本概念和特性控制系统的基本概念,包括系统、输入、输出和反馈区分开环系统和闭环系统掌握稳定性、线性、非线性和时变性等控制系统的特性重点环节2:传递函数和频率响应分析传递函数的概念和性质,传递函数的绘制和解析方法频率响应的概念和特点,频率响应分析方法分析根轨迹对系统稳定性的影响重点环节3:控制器设计方法和参数调整控制器设计方法,包括PID控制器、模糊控制器和神经网络控制器的设计原理和方法控制器参数调整的目标和方法,应用Ziegler-Nichols方法和频域方法进行参数调整重点环节4:状态空间描述和最优控制状态空间的概念和表示方法,状态空间方程的求解和状态反馈控制状态估计和最优控制的目标和求解方法重点环节5:非线性控制系统分析和鲁棒控制理论非线性系统的概念和特点,非线性系统分析的基本方法鲁棒控制的概念和重要性,鲁棒控制的基本方法重点环节6:控制系统仿真与实验控制系统仿真的概念和重要性,控制系统仿真的基本方法MATLAB控制系统仿真工具的使用,应用MATLAB进行控制系统仿真和分析控制系统实验的目的和重要性,控制系统实验的方法和技巧全文总结和概括:本教案涵盖了控制工程基础的十个章节,主要包括控制系统的基本概念和特性、传递函数和频率响应分析、控制器设计方法和参数调整、状态空间描述和最优控制、非线性控制系统分析和鲁棒控制理论以及控制系统仿真与实验。
理工电信电科0911自动控制原理教学进度表11-12上

襄樊学院教学进度计划表2011 —2012 学年度上学期院(系):物电系教研室:电子主讲教师:闵晶妍/陈红兵填表日期:2011 年9 月 1 日教务处制襄樊学院教学进度计划表2011 —2012 学年度上学期主讲教师闵晶妍职称讲师学历研究生学位__硕士____ 任课专业电信电科课程名称自动控制原理课程编号07ZX073102 年级电信电科0911学生人数32+36人总学时54 学时,其中课堂讲授44 学时;实验教学0 学时;其它教学(讨论、见习等) 6 学时;机动 4 学时教材(名称、主编、出版社、出版时间等)自动控制原理简明教程胡寿松科学出版社主要参考书《现代控制系统》(第八版),[美] Richard C. Dorf Robert H.Bishop 谢红卫译, 高等教育出版社,2001.在成绩考核方面的说明及要求:1、考核依据:2007年《自动控制原理》教学大纲2、考核方式、考试闭卷笔试,卷面100分,用时:120分钟3、课程综合成绩的记分方法:平时成绩、期末考试成绩在课程总成绩中所占的比例分别为:30%、70%。
课程综合成绩一般按百分制记分,60 分及以上为合格。
4、考试要求:考核理论知识的要求分为了解,理解,掌握等;考核的能力层次分为:学会,掌握和熟练掌握或重点掌握,或记忆,理解,应用,分析,综合,评价等。
了解(知道):指学生能辨认科学事实、概念、原则、术语,包括必要的记忆;理解(熟悉):指学生能用自己的语言把学过的知识加以叙述、解释、归纳,并能把某一事实或概念分解为若干部分,指出它们之间的内在联系或与其他事物的相互联系;掌握(学会):指学生能根据不同情况对某些概念、定律、原理、方法等在正确理解的基础上结合实例加以运用,包括分析和综合。
5、组卷原则:本课程考试试题涵盖课程教学的章节。
试题难易程度分为,较易约占50%,中等难度约占40%,较难约占10%。
6、试题类型及试卷结构:试题类型包括:选择反应(客观性)试题(如多项选择题,填空题等);建构反应(主观性)试题(如简答题,1计算题,证明题等)。
控制论基础进度表

12
周
11月19日—11月25日
3.5 Liapunov函数的选取
2
第
13
周
11月26日—12月02日
3.6稳定性与控制
2
第
14
周
12月03日—12月09日
第四章最优控制
4.1几种典型的性能指标4.2变分法
2
第
15
周
12月10日—12月16日
4.3最优控制的变分解法
2
第
16
周
12月17日—12月23日
宿州学院本科教案进度表
2012—2013学年度第一学期
共2页第1页
教案单位
数学与统计学院
专业
数学与应用数学
班级
10应数(1)(2)
学生数
课程编号
课程名称
控制论
课程类型
选修
选用教材
作者:董旺远、何红英教材名称:《控制论基础》
出版社:高等教育出版社出版日期:2011年2月版次:第1版
总学时
共36学时,其中讲课36学时,实验0学时,上机0学时
第三章稳定性
3.1稳定性概念3.2线性系统的代数判断依据
2
第
10
周
11月05日—11月11日
3.3 Liapunov理论
2
共2页第2页
周
次
起止
日期
讲授章、节及内容
(包含习题课、作业、辅导等安排)
学时分配
备注
讲课
上机
实验
第
11
周
11月12日—11月18日
3.4 Liapunov理论在线性系统中的应用
2
2
第
控制2012下半年课表

金工实习 6-15周 贝恩海 东校区工程实训中心
英语自主学习上机 东校区机房(第14,16周)
英语自主学习上机 东校区机房(第7,9,11周)
备注
说明
秋季作息时间:9-10节 18:30-20:05; 11-12节 20:15-21:50; 夏季作息时间:9-10节 19:00-20:35; 11-12节 20:45-22:20。
一元分析学 5-20周 雷冬霞 东九楼D106
代数与几何(与光实1201合) 8-19周 文志雄 东九楼D116 工程化学 7-16周 王庶 东九楼D201
大学英语读写(一)5-20周 冷琦 东九楼A109
工程化学 7-16周 王庶
东九楼D216
一元分析学 5-20周 雷冬霞 东九楼D106 军事理论 6-13周 胡家国 东十二楼F101 形势与政策 第17周 陈梅 东十二楼F102
院(系)主管教学负责人签字:秦肖臻
制表人:陈虹
联系电话:87543230
14——13
1—2 3—4 星期一 5—6 7—8 9—10 1—2 3—4 星期二 5—6 7—8 9—12 1—2 3—4 星期三 5—6 7—8 9—12 1—2 3—4 星期四 5—6 7—8 9—11 1—2 3—4 星期五 5—6 7—8 9—11 1—2 星期六 3—4 5—6 7—8 1—2 星期日 3—4 5—6 7—8
考试安排:
代数与几何(与光实1201合)8-19周 文志雄 东九楼D116 一元分析学 5-20周 雷冬霞 东九楼D106 中国近现代史纲要(与光实1201合) 6-17周 黄长义 东九楼D114
英语视听说(一)5-20周 东九楼A214 大学体育(一)5-20周 东校区操场 工程制图(一)6-18周 刘世平 东十二楼310
《控制工程基础》电子教案

《控制工程基础》电子教案第一章:绪论1.1 课程介绍了解控制工程基础的课程背景、目的和意义熟悉课程的结构和内容安排1.2 控制理论的基本概念定义控制、控制系统和控制理论掌握系统、输入、输出、反馈等基本术语1.3 控制工程的应用领域了解控制工程在工程、工业和科学研究中的应用认识控制工程在自动化、技术、航空航天等领域的案例第二章:数学基础2.1 函数、极限和连续性学习函数的概念、性质和分类掌握极限的定义和计算方法理解函数的连续性和间断性2.2 微分和积分学习导数的概念、计算规则和应用掌握积分的概念、计算方法和应用2.3 常微分方程了解常微分方程的定义和分类学习常微分方程的解法和解的存在性第三章:线性系统的时域分析3.1 系统的数学模型了解系统的输入、输出和状态变量学习线性时不变系统的数学模型3.2 系统的零输入响应和零状态响应掌握零输入响应和零状态响应的概念和计算方法分析系统的稳定性、收敛性和瞬态特性3.3 系统的稳态性能分析学习稳态误差的定义和计算方法分析系统的稳态误差性能和稳态精度第四章:线性系统的频域分析4.1 频率响应的概念了解频率响应的定义和意义学习频率响应的计算和表示方法4.2 系统的频率特性掌握频率特性的概念和性质分析系统的幅频特性和相频特性4.3 系统的稳定性分析学习奈奎斯特稳定性和波特-瓦诺夫定理分析系统的稳定性条件和稳定裕度第五章:数字控制系统5.1 数字控制系统的组成了解数字控制系统的硬件和软件结构学习数字控制器的实现方法和算法5.2 数字控制器的设计方法掌握PID控制器和模糊控制器的原理和方法学习数字控制器设计的步骤和注意事项5.3 数字控制系统的仿真和实验学习数字控制系统的仿真工具和实验设备进行数字控制系统的仿真实验和实际系统测试第六章:线性系统的状态空间分析6.1 状态空间模型的概念了解状态空间模型的定义和表示方法学习状态空间模型的转换关系和坐标变换6.2 状态空间方程的求解掌握状态方程和输出方程的求解方法分析系统的零输入响应和零状态响应6.3 状态空间分析的应用学习状态空间方法在系统控制和稳定性分析中的应用掌握状态反馈控制和观测器设计的基本原理第七章:非线性控制系统7.1 非线性系统的特点了解非线性系统的定义和特点学习非线性系统建模和分析的方法7.2 非线性控制理论掌握非线性控制系统的数学模型和稳定性分析学习非线性控制算法和设计方法7.3 非线性控制的应用了解非线性控制在、航空航天等领域的应用案例分析非线性控制系统的仿真和实验结果第八章:鲁棒控制系统8.1 鲁棒控制的概念了解鲁棒控制的定义和意义学习鲁棒控制的目标和设计方法8.2 鲁棒控制理论掌握鲁棒控制系统的数学模型和稳定性分析学习鲁棒控制算法和设计方法8.3 鲁棒控制的应用了解鲁棒控制在工业和航空航天等领域的应用案例分析鲁棒控制系统的仿真和实验结果第九章:智能控制系统9.1 智能控制的基本概念了解智能控制的定义、发展和应用领域学习智能控制系统的结构和特点9.2 人工神经网络和模糊控制掌握人工神经网络的基本原理和应用学习模糊控制的基本原理和设计方法9.3 智能控制系统的应用了解智能控制在、自动化和工业等领域的应用案例分析智能控制系统的仿真和实验结果第十章:控制系统的设计与实践10.1 控制系统的设计流程学习控制系统设计的基本流程和方法掌握控制系统设计中的注意事项和技术要求10.2 控制系统的仿真与实验学习控制系统仿真的方法和工具进行控制系统的实验设计和实验数据分析10.3 控制系统的设计案例分析分析典型的控制系统设计案例学习控制系统设计中的创新和实践经验重点和难点解析重点一:控制理论的基本概念补充说明:控制系统是工程和科学中的一个核心概念,理解其基本组成部分对于深入学习控制理论至关重要。
2011-2012上机电总课表(全部班级)
大学英语 孔素萍 2508
大学体育 计算机文化基础 多403
思想道德修养与 法律基础 王广云 2405
高等数学 孟凡卉 2519
机械制图 闵红 多102
大学英语(单) 2519 孔素萍
听力(双) 墨子 楼
计算机上机实验 机房 高等数学 孟凡卉 2508 机械制图 闵红 双 多206
大学英语3 朱丽 理2507 大学物理 张道花 多102 双 大学体育3
高等数学 刘德文2519
思想道德修 养与法律基
机械制图
思想道德修养与 法律基础
李莉 多403
李凤刚2419单 可编程控制器
3-4
王广云 2305 刘彩军 多206 机械制图 刘彩军 多 206 高等数学 刘德文 2519 素描 墨子楼 刘芳 (6-9) 高等数学 刘德文 2417 材料力学 王宁 2305 高等数学 孙振川 2519
物理化学 牟丹2504 机械设计 缑亚楠2504 大学英语3 大学英语3
电工技术 缑亚楠2416 大学英语3
电子技术 蔡田芳2420 线性代数 孙振川2417 电机与拖动 张乃标2507
1-2
付玲2508
3-4
听力(双) 墨子 听力(单) 墨子 楼 楼 计算机上机 机房
四
5-6
十大文化精神 2405
就业指导(1-14)
工设概论 线性代数2417 单 大学物理李建 全2417双 大学英语3 电子技术 蔡田芳2420 线性代数 郑娟2503单 大学物理 李建全2416 AutoCAD 缑亚楠 2508单 大学物理 李建全2417 电工技术 缑亚楠2417 线性代数 孙振川2519 大学英语 2315 2418 思想道德修养 与法律基础 潘顺 多402 2419 机械制图 刘彩军 多 102双 机械制图 刘彩军 多 501 素描 墨子楼 刘芳 (6-9) 葛美芹 2504 A 大学英语 B1 B2 陈广惠 2305 机械制图 刘彩军 多102 单
福州大学研究生课程“现控”授课计划表2011—2012-1解析
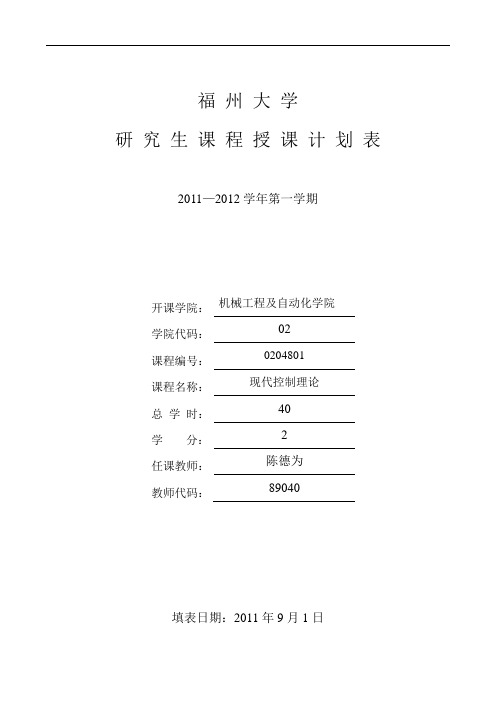
福州大学
研究生课程授课计划表2011—2012学年第一学期
开课学院:机械工程及自动化学院
学院代码:02
课程编号:0204801
课程名称:现代控制理论
总学时:40
学分: 2
任课教师:陈德为
教师代码:89040
填表日期:2011年9月1日
课堂授课方式简表
(2011—2012学年第一学期)
开课学院:机械工程及自动化学院
填表说明:1、讲课序数指本堂课为本课程的第几次授课,单位时间(上午或下午或晚上)内的教学算“一次讲课”;
2、授课方式填写:①课堂讲授;②课堂讨论;③实验、上机;④复习备考;
3、课程类型填写:学位课或非学位课。
4、总学时包括考试2~3学时,复习备考的学时不能超过一次讲课学时数。
5、本表应根据校历填写,注意扣除国家法定假日和校运动会时间。
研究生课程授课计划表
表
研究生课程授课计划
注:每章填写一页,不够可另加页。
2014-2015控制工程第一学期课程表
5-211
5-108
5-211
5-211
5-203
3
4
翻译基础
(3-20)
李成明
矩阵理论
(3-13)
王新增
(双)
传感器理论与技术
(12-19)
程学珍
数值分析
(3-17)
董玉林
5-203
5-202
5-108
5-203
下
午
5
6
高级口语
(3-12)
外教
信息检索与知识产权
(7-16)
张福俊
数值分析
(3-17)
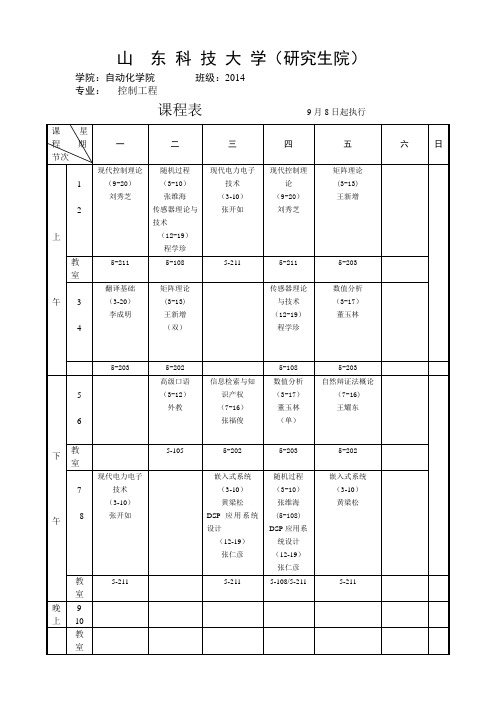
山东科技大学(研究生院)
学院:自动化学院班级:2014
专业:控制工程
课程表9月8日起执行
课星程期
节次
一
二
三
四
五
六日上午源自12现代控制理论
(9-20)
刘秀芝
随机过程
(3-10)
张维海
传感器理论与技术
(12-19)
程学珍
现代电力电子技术
(3-10)
张开如
现代控制理论
(9-20)
刘秀芝
矩阵理论
(3-13)
王新增
5-211
5-211
5-108/5-211
5-211
晚
上
9
10
教室
控制工程课程表9月8日起执行课星程期节次12上教室3午4一现代控制理论920刘秀芝二随机过程310张维海传感器理论与技术1219程学珍三现代电力电子技术310张开如四现代控制理论920刘秀芝五矩阵理论313王新增六日52115108521152115203翻译基础320李成明矩阵理论313王新增双传感器理论与技术1219程学珍数值分析317董玉林56教下室78午52035202高级口语312外教信息检索与知识产权716张福俊5108数值分析317董玉林单5203自然辩证法概论716王耀东5105520252035202现代电力电子技术310张开如嵌入式系统310黄梁松dsp应用系统设计1219张仁彦随机过程310张维海5108dsp应用系统设计1219张仁彦嵌入式系统310黄梁松教室晚上910教室52115211510852115211
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
广东工业大学本科教学进度表2011 — 2012 学年度第1 学期
共 2 页第 2 页
说明:
1、本表由主讲教师按《广东工业大学本科教学进度表的编制及管理规定》编写,经基层教学单位教学负责人审核,教师所在学院教学主管审核批准执行;
2、若不在学校安排的地点授课,需在备注栏写明上课地点;
3、本表须在每学期开学后第1周内送交基层教学单位审核,第2周内学院审核,第3周内交学生所在学院2份和发给学生班1份。
主讲教师签名:填写日期:2011 年8 月26 日基层教学单位教学负责人签章:审核日期:年月日学院教学主管签章:审核日期:年月日。