ChipDataenter服务端培训教程
微 bit服务扩展板用户手册说明书

Servo Driver for Micro:bitUser ManualOVERVIREThis Servo Driver board is an PWM/servo expansion board for micro:bit. UsePCA9685 chip, expands up to 16 channels and support 12-bits resolution for each channel. Using I2C interface. This board also integrates 5V regulator, up to 3A output current, can be powered from battery through VIN terminal. It could be used to for Robot applications.FEATURES➢Power supply: 6V~12V (VIN terminal)➢Servo voltage: 5V➢Logic voltage: 3.3V➢Driver: PCA9685➢Control interface: I2C➢Dimension: 65mm x 36mm➢Mounting hole size: 3.0mmHARDWAREYou can connect battery to the green socket VIN on the left for power supply, for VIM, voltage range 6V~12V. 5V regulator on board could output 3A (MAX) current. You can also connect 5V power supply to the POWER interface on the right, and it could power micro:bit via 3.3V regulator.GPIOs on top are interfaces of servo. Black pins are connected to GND (mostly connect to brown wire of servo). Red pins are VCC pin connected to 5V. Yellow GPIOs are signal wires of PWM, channel 0~15 supports 16 servos connected at the same time.【Note】1.If you only connect 5V power supply to USB interface, servo cannot be driven.2.You should connect higher power supply for higher-power servo.3.Make sure servo are connected properly, otherwise they will not move.The website of typescript: https:///# ,Open browser and type the address as below:Click Projects -> New Project to create a new project.Then click Advanced->Add Package In the pop-up dialog box, click the search field box to copy the URL: https:///waveshare/pxt-ServoClick Servo searched to add the package.After adding, you can see that Servo block class appears to block area. In the class, two blocks are included.: This block is used to control the angle of servo in range 0°~180°. Channel can be change from 0 to 15.: Use this block, you can set the PWM pulse in range: 500~2500.The relationship between start pulse and degree is as below:500 ------- 0°1000 ------- 45°1500 ------- 90°2000 ------- 135°2500 ------- 180°You can control servo just by setting channel, degree and pulse, it is simple.DEMO CODESWe provide three demo codes (HEX file) for this module. You can copy them to micro:bit for testing. Drag HEX file to the web page directly could get details information of demo code: https:///MICROBIT-SERVOThis demo code is used to rotate 16 servos in range 0~180 all the timeitem: current angleFlag: step length for every change. Positive value stands for co-rotating, and negative for reverse, interval is 20s.After running the code, y ou can see that 16 servos turn from 0° to 180°, then turn 0° again all the time, you can adjust its speed by change the pause on code. MICROBIT-SERVO-KEYThis demo uses A and B keys to control rotation of servo 0. It moves forward when A button is pressed and moves backward when B button is pressed.MICROBIT-SERVO-BLUETOOTHmicrobit-Servo-Bluetooth, the function of this code is to rotate four servos 0~4 via Bluetooth. If you assemble servo to robot arm, it could control robot ram via Bluetooth.This is the Bluetooth remote control code. pos0~pos3 are current degrees of channel 0~3. step0~step3 are step length.When command are received by micro:bit from app, micro:bit will change the step as received to control servo. If step is not equal to 0, change the pos and let servo move. (Note that the value of pos should in: 0~180)To use this demo code, you should first install APP for Bluetooth communication. (Only support Android)⚫Bluetooth App (for Android)Open APP, click Settings on the right top, uncheck Filter unpaired micro:bit from scan results?.Scanning BBCC micro:bit device and connect it. After connecting, you can enter the control page by click the Joystick icon.There are 8 buttons, could be used t control servos from channel0 to channel3.Note: If you want to create new Bluetooth project, don’t forget to setting project that, choose No Pairing Required:Anyone can connect via Bluetooth.MICROBIT-SERVO-RADIOThis code we use 2.4Ghz RF function of micro:bit. To test this code, you need two micro:bit, one is connected to Joystick for mciro:bit as sender, and another connected to Servo Driver for micro:bit as receiver which will control robot.Code if sender:Code of receiver:Similar to Bluetooth code, pos0~pos3 are current degree of servos from channel 0 to channe 3, step0~step3 are step length.You should flash sender code to micro:bit which connect Joystick module and flash receiver one to servo module. Then you can control servo by module Joystick for micro:bit.For more details about Bluetooth and 2.4G, you can refer to the user guide of KitiBot for micro:bit:https:///wiki/Chapter_8_of_KitiBot-Microbithttps:///wiki/Chapter_9_of_KitiBot-Microbit。
DataStage官方培训教程10
DataStage官方培训教程10DataStage是一个ETL工具,它提供了广泛的数据连接选项以及数据转换和清理功能,以帮助企业完成数据仓库构建和管理。
由于数据驱动的世界越来越重要,数据管理和ETL应用程序的需求也变得越来越迫切。
DataStage官方培训教程10涵盖了DataStage常见的任务和操作,为学习DataStage用户提供了完整的指导。
在本文中,我们将对DataStage官方培训教程10进行分析和实践,以帮助读者更好地了解和掌握DataStage。
DataStage官方培训教程10的结构和内容DataStage官方培训教程10是一本基于DataStage 11.7版本的官方培训教材。
该教材共包含15个单元,分为4个部分。
第一部分介绍了DataStage概述和安装过程,包括DataStage架构、组件、工作流程等。
第二部分介绍了DataStage的数据源定义、数据移动和数据变换。
第三部分主要介绍了DataStage的错误处理和调试,包括日志、报告、来源和目标检查等。
第四部分介绍了高级主题,如DataStage管理、性能调整、共享资源和集成JDBC驱动程序等。
DataStage官方培训教程10的学习方法和技巧DataStage官方培训教程10是一本详细的教材,需要耐心和时间来学习。
以下是一些学习方法和技巧,可以帮助读者更好地掌握DataStage。
1.按照教材结构进行学习按照各个部分和单元的结构进行学习,以便逐步深入理解每个主题。
特别是,在学习前两部分时需要仔细阅读和理解数据源定义、数据移动和数据变换的概念和操作指南,掌握其重要性和影响关系。
2.完整地跟随实例进行演示教材中提供了许多实例来示范DataStage的各个方面,读者可以用自己的DataStage环境进行实操,加深对DataStage的理解和熟练度。
值得注意的是,在学习高级主题时需要一定的实践经验和技能,否则可能会花费更多的时间和精力。
chiplogic 新用户使用指南
新用户使用指南第一步软件的获取和安装 (1)第二步安装License文件 (1)第三步加载芯片图像数据 (2)3.1 芯片图像数据和工程数据 (2)3.2 加载芯片数据的步骤 (2)第四步启动服务器软件 (3)第五步运行客户端软件 (3)5.1 打开芯片分析工程 (3)5.2 打开一个工作区 (4)5.3 常用的图像浏览操作 (4)附录A 使用FTP下载软件和数据 (5)A.1 FTP服务器设置 (5)A.2 使用DOS命令行下载 (5)A.3 使用CuteFTP下载 (6)本文档只是对初次使用者做最简单的介绍,用户在使用ChipLogic Family开展芯片分析项目之前,强烈推荐阅读“快速参考手册”。
软件技术支持电话:+86-10-82755750/55 ext.601、ext.603传真:+86-10-82755750/55 ext.604网站:E-mail:support@第一步软件的获取和安装最新版本的软件可以从北京芯愿景公司的FTP网站上获取,或者向北京芯愿景公司索取软件光盘。
ChipLogic Family软件放在FTP服务器的“pub”目录中,北京芯愿景公司会随时将最新的稳定版本发布在FTP服务器上。
Family系统的每一个软件均有独立的压缩包,ChipLogic有两种格式的安装包。
以“.zip”为后缀的安装包(例如ChipAnalyzer-v5.0.03.zip)只需要解压即可,不需要安装。
以“.exe”为后缀的安装包(例如ChipAnalyzer-v5.0.03.zip)需要运行,然后安装软件提示一步一步地安装。
在安装ChipLogic Family软件时,请选择一个磁盘空间较大的硬盘,然后建立一个名称为“ChipLogic Family”的文件夹,然后将所有的软件均安装在这个目录下,如右图所示。
第二步安装License文件Family安装完毕以后,在正式运行软件之前还需要一个License文件。
浪潮英信NF130服务器用户手册说明书

尊敬的浪潮英信服务器用户本手册介绍了英信NF130服务器硬件的技术特点与软件的设置安装过程请将我方产品的包装物交废品收购站回收利用以利于污染预防未经浪潮集团有限公司许可任何单位和个人不得以任何形式复制本用户手册本手册中的内容如有变动恕不另行通知请向浪潮集团有限公司垂询浪潮Pentium奔腾是Intel 公司的注册商标Windows是微软公司的注册商标声 明 在正式使用英信NF130服务器之前方可开始使用英信NF130服务器在使用英信NF130服务器过程中2请将机器的详细配置反映给我们的客户服务中心请不要和任何其他型号机器的相应设备混用我们希望您首先和相应软件的提供商联系共同解决您碰到的问题您购买的产品可能和手册中的描述有所不同6.本手册中涉及的各软硬件产品的标识7.我们特别提醒您8.以上声明中浪潮集团有限公司拥有对以上声明的最终解释权如果对该电池使用不当可以引起爆炸危险关于本手册第一章加电运行系统设置这一章介绍英信NF130服务器BIOS设置情况系统硬件这一章介绍英信NF130服务器的硬件安装情况IDE RAID这一章介绍如何在英信NF130服务器上配置第五章疑难解答在这一章中以避免您在操作中出现不必要的失误希望广大用户能够包涵目 录第一章 快速使用指南.....................................................11.1 开始使用英信NF130服务器.........................................11.2 英信NF130服务器技术特性.........................................31.3 随机软件说明.....................................................4第二章 系统设置.........................................................52.1 设置系统BIOS.....................................................52.2 主板跳线设置....................................................14第三章 系统硬件........................................................163.1 安装处理器......................................................163.2 安装内存........................................................183.3 安装硬盘........................................................203.4 安装板卡........................................................21第四章 IDE RAID........................................................ 224.1 IDE RAID设置....................................................22第五章 安装操作系统....................................................295.1 安装 Windows 2000 Server........................................295.2 安装RedHat Linux 7.3............................................345.3 安装Redflag Linux Server 3.0....................................395.4 安装Netware 5.0.................................................43第六章 疑难解答........................................................486.1 常见故障解决....................................................486.2 技术支持信息....................................................49请将我方产品的包装物交给废品收购站回收利用1第一章 快速使用指南1.1开始使用英信NF130服务器一然后用裁纸刀把包装箱的封条打开把主机从包装箱中抬出如果有缺漏请您与供货商联系放置服务器请为NF130服务器选择合适的机柜和放置地点通风良好并且远离热源电动机等设备表1-1注:如果要将机器安装到机柜中NF130服务器快速使用指南 -- 352永不停顿的浪潮英信服务器英信NF130三光驱 2USB接口 4 千兆网卡指示灯 6硬盘状态指示灯后面板示意图1鼠标接口 3USB接口 5VGA接口 7百兆网卡接口 93四显示器2连接好键盘34系统的连接完成1.2 英信NF130服务器技术特性一 支持单P4处理器 系统总线533MHz兼容400MHz支持PC2100/1600 DDR ECC Unbuffer内存 2个IDE通道 支持ATA 66/100/133 IDE硬盘8M显存 1个PS/2鼠标接口 4个USB接口 符合ATX 12V规范4永不停顿的浪潮英信服务器英信NF130二支持WOL2CPU温度及散热风扇转速的监测定时开机功能1.3 随机软件说明英信NF130服务器随机带有如下软件导航软件光盘2. 浪潮英信服务器管理软件光盘2. IDE RAID Driver for Redhat7.3. 支持Redhat Linux7.3操作系统的IDE RAID控制器驱动程序但我们建议您妥善保存5第二章 系统设置前 言BIOS设置是指利用专用的设置程序来调整系统和硬件参数随着硬件种类的增多由于对系统的正常运行有很大影响或者降低系统的运行性能建议您使用系统出厂时的默认值请记录下相应的初始设置可以根据记录的初始设置重新恢复在未理解各参数表示的意义前本章主要对常用设置作详细说明2.1 设置系统BIOS加电启动服务器Press TAB to show Post screen,DEL to enter SETUP系统可进入BIOS设置程序您可以通过箭头方向键进行项选择永不停顿的浪潮英信服务器英信NF130入子菜单Quit 67和使用IDE Primary Master/Slave选中该项后使用Auto默认设置为8永不停顿的浪潮英信服务器英信NF130Pri.M Maxtor xxx外接普通IDE硬盘时会有此项Virus Warning此项用来设定IDE硬盘引导扇区病毒入侵警报功能如果程序企图在此区中写入信息并且发出蜂鸣报警First/Scond/Third Boot Device该项用于在启动系统或安装操作系统时使用系统的默认设置为Boot Other Device选择该项进行参数设置Enabled93DRAM Data Integrity Mode此项设置使能系统DRAM的ECC检测功能+/-Non-ECC进行参数设置10永不停顿的浪潮英信服务器英信NF1304.Integrated Peripherals该部分可实现对主板整合接口设备的设置On-Chip Primary/Secondary PCI IDE选择两个预设值Enabled可以激活主板上的两个普通IDE通道USB Controller此项用来设定是否允许系统使用USB设备 USB 2.0 Controller此项用来设定是否支持USB2.0标准的设备+/-进行参数设置11Power Management Setup进行参数设置Enabled.SoftBTTN 此项设置机器电源开关的功能方式+/-默认设置12永不停顿的浪潮英信服务器英信NF1306建议使用系统的默认设置可以实时显示CPU的温度Shutdown Temperature此项用来设置CPU温度达到设置的上限时默认设置为DisabledCPU Clock Ratio此项用来设定外频和处理器内部时钟频率的倍数关系13检时不能正确显示CPU频率Load Fail-Safe Defaults自动载入系统最安全的设置Load Fail-Safe Defaults(Y/N)?,键入Y回车确认此项自动载入的参数未对系统的性能进行优化选中该项回车Load Optimized Defaults(Y/N)?,键入Y回车确认此项自动载入的参数针对系统进行了优化Setup Supervisor/User Password Setting此项可以设置系统超级用户口令和用户口令可以防止未被授权的人更改系统的配置系统每次开机都会要求输入密码口令选中此项Enter Password:此时注意大小写退出BIOS设置后选中此项直接按回车并确认后Save & Exit Setup保存当前修改后的参数选择该项永不停顿的浪潮英信服务器英信NF130提示取消操作否则按ESC设置程序不保存修改后的参数并退出BIOS否则直接回车取消操作1415一JBAT1CMOS跳线有三个引脚Pin1 默认 清除CMOS3引脚1从插座上拔下电源线插头3引脚 把跳线帽恢复到1 连接好电源线2短接EnableDisable永不停顿的浪潮英信服务器英信NF130第三章 系统硬件本章将指导用户如何安装系统硬件静电释放可能损坏服务器组件在进行与系统硬件相关的操作时12不要触摸板卡上芯片的请放回各自的防静电袋持拿处理器时打开机箱所示16173先把导风架移走轻轻放下放置合适后图3. 1图3. 218永不停顿的浪潮英信服务器英信NF1304散热片上的螺丝要与主板上的4个固定孔柱对好然后将散热片风扇的电源插头插在主板的CPU风扇电源插座上3.2 安装内存如果您要扩展或更换英信NF130服务器内存这样可以确保系统的稳定性不要用力过大关闭系统电源将内存插槽两端的固定卡向两侧打开图3.3注 意193注意内存条上的缺口和内存插槽上的凸起要吻合注意把两边的卡销卡好图3.4图3.54将机箱盖安装好20永不停顿的浪潮英信服务器英信NF1303.3 安装硬盘英信NF130服务器支持ATA-133/100/66 IDE硬盘.如果您要扩展此类设备1断开交流电源线缆34将其三个固定孔与机箱中间硬盘固定架上的尖凸对应好把硬盘完全固定如图3.6所示进行完以上操作后213.4 安装板卡为确保系统的稳定性推荐使用我们测试认证过的相应型号的产品断开交流电电缆 将板卡插入转接卡的PCI槽并用螺丝固定然后用力下压安装了PCI卡的固定支架 进行完以上操作后22永不停顿的浪潮英信服务器英信NF130第四章 IDE RAID4.1 IDE RAID设置一 开机启动检测2按<Ctrl - F>进入IDE RAID设置主菜单MBFastTrak133(tm)23二自动设置菜单中[Auto Setup Options Menu]为可设置部分1Optimize Array for 改变选项设置Performance: 表示RAID0表示RAID1 [Performace]Typical Application to use ] Up [24永不停顿的浪潮英信服务器英信NF130该操作只有当步骤 1 设置为选中使用/DESKTOP表示应用于服务器表示应用于音频/视频编辑4如果是创建RAID1N系统提示查看磁盘分配菜单如ChannelDo you want the disk image to be duplicated to another?(Yes/No)Y - Create and duplicateN - Create OnlyArray has been created.<Press any key to reboot >25Capacity四查看阵列菜单通过上进入下一级菜单按[ESC]键Delete Array键进入Delete Array菜单]Up [26永不停顿的浪潮英信服务器英信NF130删除阵列步骤如下2系统提示4退出菜单并重新启动机器Rebuild Array使RAID阵列恢复正常1并进入IDE RAID 主设置菜单]Up [27354按回车键继续按回车键继续重建结束后Controller Configuration键进入Controller Configuration菜单[Rebuild Array Menu]Array No RAID Mode Total Drv Capacity(MB) StatusArray 1 Mirror 2 81000 CriticalArray 2 ------- ------- ------- -------Array 3 ------- ------- ------- -------Array 4 ------- ------- ------- -------[ Enable[System Resources Configuration]Channel 1 Interrupt B I/O Port ,Space] change Option [ESC] Exit28永不停顿的浪潮英信服务器英信NF130在菜单中项默认设置为第五章 安装操作系统本章介绍的各操作系统的安装方法都是针对配置了IDE RAID的系统Netware5.0操作系统时可以作为安装参考Windows 2000 Server(中文版)安装光盘+补丁程序IDE RAID Driver for Windows/Netware驱动程序软盘(随机带)浪潮导航软件光盘USB软驱安装步骤1Press TAB to Show Post Screen,DEL to enter SETUP 进入BIOS设置程序具体设置可参考手册中系统设置部分按任意键3Press F6 if you need to install a third partySCSI or RAID Driver......系统开始加载文件2930永不停顿的浪潮英信服务器英信NF1304Setup was unable to load support for the massstorage device you specified...根据提示插入驱动程序软盘在驱动程序列表中选择系统显示界面系统显示R要开始安装Windows 2000要修复Windows 2000中文版的安装要停止安装Windows 2000并退出安装程序继续安装Windows 2000许可协议用户可通过按<Page Down>浏览协议内容9以下列表显示这台计算机上的现有磁盘分区和尚未划分的空间要在尚未划分的空间中创建磁盘分区删除所选磁盘分区用户可根据实际情况选择在此选中按下<C>键3110要回到前一个屏幕而不创建新磁盘分区最大新磁盘分区为 XXX MB单位MB否则在后面系统将提示您重新分区11在此选中没有格式化的选择的磁盘分区没有经过格式化使用上移和下移箭头键选择所需的文件系统请按ESC系统默认选择建议使用请稍候系统会显示格式化进度条32永不停顿的浪潮英信服务器英信NF130安装程序格式化完新的分区后请稍候系统会显示文件复制进度条取出驱动程序软盘和光盘提示插入安装光盘安装程序提示以便正确安装Windows 2000 Server15如键盘和鼠标等16区域设置根据需要进行设置17自定义您的Windows 2000 软件姓名然后单击<下一步>25个字符Windows 2000 Server支持两种授权模式每服务器V33客户端访问许可证设置20根据实际情况设置计算机名不能超过14个字符根据实际需要22单击<下一步>安装[开始]菜单项目保存设置然后继续下一步正在完成Windows 2000安装向导单击<完成>系统重启后输入用户名和密码26配置服务器如果不需要配置27前的勾去掉安装Windows 2000 Server操作系统的补丁程序在导航光盘中找到补丁程序 安装完成后重启系统34永不停顿的浪潮英信服务器英信NF13030在点击鼠标右键Windows 2000 Server安装过程基本结束可以作为安装参考RedHat Linux 7.3 安装光盘IDE RAID Driver for RedHat 7.3在安装操作系统前确认USB 2.0 Con-troller 项设置为Disabled安装步骤12时系统提示选择按回车继续Welcome to Red Hat Linux在提示符后依次键入如下命令35#cd /tmp#mknod sda b 8 0#mkdir /mnt/floppy将USB软驱连接到机器前置USB接口然后依次键入如下命令时返回到单击<Next>继续English8界面单击<Next>继续选择GenericInstall Type选择并根据需要本安装过程以选择Server为例36永不停顿的浪潮英信服务器英信NF13011我们在此选择系统提示,点击<Yes>继续选择,单击<Next>继续you have selected to remove all partitions......15.在单击<Next>继续Boot Loader Configuration17界面然后单击<Next>继续Network ConfigurationNetmask 等参数19Firewall Configuration在此我们采用默认设置20Additional Language Support在此我们采用默认设置21Time zone selectionAsia/shanghai22Account Configuration最少6位根据需要选择要安装的组件37我们建议选择安装GNOME24Graphical Interface(X) ConfigurationATI Rage XL25窗口系统将开始复制文件需要按照提示更换安装光盘Boot Disk Creation如果不需要27Monitor Configuration单击<Next> 继续安装Customize Graphics Configuration在下方的单击<Next> 继续安装Congratulations Ctrl+Alt+F2依次键入如下命令setup is complete.umount floppydisk and press ......"后键返回到注 意38永不停顿的浪潮英信服务器英信NF130单击<Exit>按钮系统重新引导配置网卡百兆网卡的驱动程序在安装系统时已自动加载1进入图形界面System2点击Add然后点击<Next>继续eth1配置IP地址Subnet Mask对话框中选择eth1在出现的对话框中选择Yes完成配置会看到/SCSI/FastFrak.0的提示再次重新启动系统后395.3 安装Redflag Linux Server3.0本安装过程为Redflag Linux Server3.0的基本安装步骤具体如何设置有关选项安装前需要准备确认USB 2.0 Con-troller 项设置为Disabled1系统从CD-ROM中执行引导程序提示符后键入expert3界面选择Cancel, 按<Enter>键继续us5installation method6I don't have any special device drivers loaded foryour system......Add Devices7what kind of device would you like to addSCSI8Promise FastTrak 100 ide-raid注 意40永不停顿的浪潮英信服务器英信NF1309时10界面选择Agree, 然后点击<下一步>继续正确输入产品序列号13定制软件包在此必须选择定制软件包无法正常安装千兆网卡驱动全部选中14本安装过程选择然后点击<下一步>继续 注Save表示把当前的分区表信息写入到硬盘中放弃当前的改动点击<Add>Partition TypeSize(Megs)交换分区的容量至少为16M在/Size(Megs)建议最少为1G提示时4118选择需要格式化的分区如果选中 "在格式化时检查坏块"将在格式化的过程中检查坏磁道系统进入配置用户界面Root删除在添加普通用户时必须按20可根据自己的需要进行设置21如果不想改变选项22点击<确定>继续并显示安装进度进入创建引导盘界面启动Linux系统创建引导软盘然后单击<下一步>就会完成引导软盘的制作选中然后单击<下一步>继续进入安装完成界面取注 意注 意42永不停顿的浪潮英信服务器英信NF130出安装光盘配置网卡在桌面点击控制面板网络设定客户任务主机名和IP网络设备在弹出的窗口中点击从eepro100百兆网卡按照如下步骤压缩包复制到指定目录# cp e1000-4.2.17.tar.gz /usr/local/src# cd /usr/local/src# tar zxvf e1000-4.2.17.tar.gz# cd e1000-4.2.17/src# make# make install# insmod e1000# reboot2. 重启系统后按照提示进入完成对网卡IP435.4 安装NetWare 5.0本安装过程为Novell NetWare 5.0 的基本安装步骤具体如何设置有关选项Novell Netware 5.0 操作系统光盘DOS 启动软盘DOS系统下的IDE CDROM驱动软盘网卡驱动盘IDE RAID Driver for Windows/Netware软盘安装准备将USB软驱连接到机器上创建一主DOS分区编辑Config.sys 和Autoexec.bat 文件步骤如下44永不停顿的浪潮英信服务器英信NF130注意 在A:\> 提示符下键入Install ,按<Enter> 开始安装在DOS 提示符下改变目录到CD-ROM 盘符(如D:)启动安装...Chinese simplified...4 按[PageDown]浏览许可协议或直接按[F10]键接受协议Welcome to the Netware server installation... new server...C:\nwserver , 按[Enter]键继续Select the regional settings for the server 按[Enter]键继续选择<Continue>系统开始拷贝文件当系统出现如下提示时45用上下箭头键选择 IDEATA[INS]键进入界面依次按[INS]键系统从软盘读取文件按[ENTER]键继续 按[ENTER]键继续 按[ENTER]键继续然后选择系统开始加载驱动The following device drivers were detected forthis server.Add,Change,or delete device drivers as needed." 界面 MPS14Hotplug Support Module Optional。
ChipLogic Analyzer软件培训教程
49
单元比较窗口
多个单元 模板图像 并列显示 有助于发 现重复单 元模板
50
合并单元模板(1)
合并单元模板
在单元比较窗口内利用合并图标 按Ctrl+T,输入两个单元模板名 在工程面板单元栏内选中一个模板,在其右键 菜单内选择“合并单元模板” 在弹出的合并模板对话框内设置模板相对方向
被合并模板的所有实例将添加到目标模板内
36
其他工作区操作
复制工作区
复制一个与当前工作区数据完全相同的工作区
删除工作区
必须工作区创建者或者项目经理才能删除工作区
比较工作区
用来比较两个工作区内的线网数据是否相同
37
四、单元识别
38
单元识别标准步骤
标注单元区 圈定单元模板 搜索单元实例 确认单元实例 直接添加实例 检查单元实例
39
标注单元区
每个工作区数据提交前都应严格检查,确保尽可能 少的识别错误传递到下一个步骤 DS_M12即为模块Digtal_Small的最终线网数据
10
线网连PIN
如果将整个芯片作为一个模块
需 先 完 成 单 元 工 作 区 WHOLE_CELL、 线 网 工 作 区 WHOLE_M12数据提取 将上述两个工作区合并到最终网表工作区WHOLE_NET内 在WHOLE_NET内按照单元类型逐类进行线网连PIN
19
工程面板——单元栏(2)
单元模板项的右键菜单
可进行各项单元模板的 数据管理 将在单元识别操作中详 细介绍
20
工程面板——显示栏(1)
21
工程面板——显示栏(2)
双击一个显示层名可设置显示属性
颜色 线宽 线型 是否可见 是否可选
22
2024年芯片类培训教程

芯片类培训教程一、引言随着科技的飞速发展,芯片作为现代信息技术的核心,已经广泛应用于各个领域。
芯片产业在我国也得到了高度重视和快速发展。
为了满足市场对芯片人才的需求,芯片类培训教程应运而生。
本教程旨在为广大芯片行业从业者、学生及爱好者提供一个系统、全面的芯片知识学习平台,帮助学员掌握芯片设计、制造、测试和应用等方面的关键技术。
二、教程目标1.培养学员对芯片产业的认识,了解芯片在现代社会中的重要性。
2.使学员掌握芯片设计的基本原理和方法,具备一定的芯片设计能力。
3.使学员熟悉芯片制造工艺,了解芯片生产过程。
4.培养学员具备芯片测试和验证的能力,确保芯片产品的质量和性能。
5.帮助学员了解芯片在不同领域的应用,拓展职业发展空间。
三、教程内容1.芯片基础知识(1)半导体物理基础(2)半导体器件原理(3)集成电路设计方法(4)芯片制造工艺2.芯片设计(1)数字电路设计(2)模拟电路设计(3)混合信号电路设计(4)芯片封装与测试3.芯片制造(1)光刻技术(2)掺杂技术(3)薄膜沉积技术(4)刻蚀技术4.芯片测试与验证(1)芯片测试方法(2)芯片验证流程(3)故障分析与定位(4)可靠性测试5.芯片应用(1)计算机芯片(2)通信芯片(3)消费电子芯片(4)汽车电子芯片四、教学方法1.理论教学:通过讲解、案例分析等方式,使学员掌握芯片相关理论知识。
2.实践教学:结合实际工程项目,让学员动手实践,提高实际操作能力。
3.在线学习:利用网络平台,提供丰富的学习资源,方便学员随时随地进行学习。
4.企业实习:安排学员到企业实习,了解芯片产业现状,提高职业素养。
五、师资力量本教程由具有丰富教学经验和实际工程经验的专家、教授授课。
他们分别来自国内外知名高校、科研院所和企业,具备深厚的学术背景和丰富的实践经验。
六、证书与就业学员完成本教程学习并通过考试,可获得相应证书。
本教程旨在培养具备实战能力的芯片人才,为学员就业和职业发展提供有力支持。
H3CHCTE培训教材第2章物理层及以太网故障排除
PPT文档演模板
H3CHCTE培训教材第2章物理层及 以太网故障排除
某些特性对内存的要求
l 路由器中主要是路由特性和NAT特性与内存关系最密切
è 当路由表条目在2000条以内,需要32M内存; è 当路由表条目在10000条以内,需要64M内存; è 当路由表条目在30000条以内,需要128M内存; è NAT支持的连接数在1700条以内,需要32M内存; è NAT支持的连接数在8000条以内,需要64M内存; è NAT支持的连接数在20000条以内,需要128M内存 。
PPT文档演模板
H3CHCTE培训教材第2章物理层及 以太网故障排除
PPT文档演模板
课程内容
•物理层故障排除关注点 •路由器升级故障排除 •物理层典型案例分析 •以太网故障排除综述 •以太网故障排除相关命令 •以太网典型案例分析
• H3CHCTE培训教材第2章物理层及 以太网故障排除
软件升级方法
è R2600/3600系列路由器:有两个内存插槽 ,支持32M+32M, 64M+64M配置,不支持32M+64M,因此最大配置是128MB;
è R2600E/3600E : 有 两 个 内 存 插 槽 , 支 持 的 最 大 内 存 配 置 是 128MB+128MB,因此最大配置是256MB。
è 一个一个地插上其他设备,发现插上转接头后路由器无法正常起 动,更换转接头,路由器正常起动。
PPT文档演模板
H3CHCTE培训教材第2章物理层及 以太网故障排除
案例2:电源接地不好导致路由器通信不畅通
l 现象描述
è 某局组网如下:变电所A使用Quidway R4001E路由器通过E1链 路和中心局的Quidway R3680 路由器组网。R4001E路由器电源 连接一个UPS设备以保证不断电。
DataStage官方培训教程7

to disk Can present issues when reading from a hashed
file at the same time
©2003 Ascential Software Corporation. All Rights Reserved Reproduction and/or Redistribution Is Prohibited.
Uses of Hashed Files
Good for locally storing tables of a remote database that will be read from frequently
Group 3
Group 4
Group 5
overflow Group 2
©2003 Ascential Software Corporation. All Rights Reserved Reproduction and/or Redistribution Is Prohibited.
Creating Hashed Files
column values Files can be cataloged in the project’s VOC file for
easy retrieval
©2003 Ascential Software Corporation. All Rights Reserved Reproduction and/or Redistribution Is Prohibited.
Available hashed files within the project appear— select one or multiples
Sinumerik 808D ADVANCED 启动指南及培训手册说明书

Training manualSinumerik 808D ADVANCED Commissioning Guide Version 2013-09s NotesCommissioning Guide Page 2 808D ADVANCED Turning and Milling808D ADVANCED Turning and MillingPage 3 Commissioning GuidesThe warranty is connected to the product serial number of the808D ADVANCED.You can find the product serial number:On the back of PPU system hardware.Picture 1product serialnumberOr on the display.After switch-on, press the “Shift” and “Alarm” keys together.Then press the “Extension” buttonThis will enter into the system area.(see picture 1)Press softkey to enter the screen of service axes ( see picture 2).Press softkey to enter the screen of version data ( see picture 3).You can find the serial number information which needs to be registeredstarting with the letters “SZV”.For any question about ”SZV” serial number and the steps to register ,Please contact the Siemens Technical Support & Service Hotline:+86 4008104288Picture 2Picture 3Product identification / SINUMERIK 808D ADVANCEDNotesCommissioning Guide Page 4 808D ADVANCED Turning and Milling808D ADVANCED Turning and Milling Page 5 Commissioning GuideNotesCommissioning Guide Page 6 808D ADVANCED Turning and Milling808D ADVANCED Turning and Milling Page 7 Commissioning GuideCommissioning Guide Page 8 808D ADVANCED Turning and MillingIn the following technical drawing the mounting dimensions for the PPU and the MCP are shown.You must provide sufficient space (recommended distance: 80 mm) between the maintenance door and the cabinet wall for replacing the For further components refer to :- Commissioning manual page 21Spindle encoderUSB stickHandwheels+24V DC power supply808D MCPMotor Motor MotorSINUMERIK808D ADVANCED PPUPC/PG Spindle motorInverter or servo spindle driveNotes :1. PC and memory stick is not included in scope of delivery.2. "USB", "Handwheel","24V DC power supply", "Emergency stop button", "Inverter or servo spindle drive", "Spindle encoder" are also not included in scope of delivery.Emergency stop buttonFactory NetworkSINAMICS V70 In total 14 clamps are provided together with the delivery of PPU 1. 8 clamps for mounting PPU. 2. 6 clamps for mounting MCP.Terminator808D ADVANCED Turning and Milling Page 9 Commissioning GuideBBAAX10 NCMCPThe clamps are located at the positions indicated with the black triangles. The black triangles can be seen in the above picture highlighted with red circles.PPU = P anel P rocessing U nit MCP = M achine C ontrol P anel808D PPU808D MCPCommissioning Guide Page 10 808D ADVANCED Turning and MillingThe clamps are located at the positions indicated with the black triangles. The black triangles can be seen in the following picture with red circles.MCPMCPVertical MCP without handwheelVertical MCP with ingrate handwheel808D PPU808D MCPThe cut-out dimensions for the 808D ADVANCED vertical PPU and Cut-out dimensionsElectrical cabinet> 20 mm> 20 mm> 20 mm> 20 mm> 100 m m> 100 m mSINAMICS V70 Servo driveSINAMICS V70 Servo driveSINAMICS V70 Servo drive For further information refer to :-Circuit breaker (optional) Switches off the power supply to protect thenetwork when overcurrent occursLine filter (optional)Protects the network from harmonic load and/or interference voltages.Braking resistor (optional) Absorb excess regenerative energy in the DC link when the capacity of the internal braking resistor is insufficientSINUMERIK 808D ADVANCEDEmergency stop button (optional)Stops a motor in emergency cases.24 V DC power supplyBrake cableEncoder cableP o w e r c a b l e3 phase 380V AC line supplyL1 l2 l3SIMOTICS S-1FL6 servomotorSINIMICS V70 servodriveAccessories not included in the scope of deliveryConnections not necessarily requiredShielding layerDrive bus terminator14 311 13414 126 47Legend Interface CommentMCP Back X10USB interface, for connection with thePPUBB AAX10 NCMCP back1NoteConnect USB cable between X30 on PPU and X10 on MCP.These 4 aspects should be considered during selection of 24V DC supply calculation base on name plate. Consideration of redundancy coefficient base on regulation of OEMMCP backX10 NCE-stop Limit X+ Limit X - Limit Y+ Limit Y- Limit Z+ Limit Z- Ref X M1 2 3 45 6 7 8 9 10X100+ 24VMillingDigital inputsDistribution I/O board For the connection of distribution I/O on X301must be configured. MLFB for distribution I/ORef Y Ref ZMagazine countMagazine at spindle position Magazine at original position Magazine at release position Magazine at clamp position M1 2 3 4 5 6 7 8 9 10X101+24VDisk magazine: magazine rotating CW Disk magazine: magazine rotating CCW Disk magazine: magazine in spindle position Disk magazine: magazine in original position Disk magazine: spindle tool releaseHandheld unit active M1 2 3 4 5 6 7 8 910X201Coolant level lowCooling motor overload Lubrication level lowLubrication motor overload M1 2 3 4 5 6 7 8 9 10X102+24VWorking lampChip remover forward Chip remover reverse Cooling pump Lubrication pump Safety door open M1 2 3 4 5 6 7 8 910X200Turning Digital inputs11 - Handheld unit: axis X selected 13 - Handheld unit: axis Z selected 14 - Handheld unit: axis 4th selected 15 - Handheld unit: INC X1 16 - Handheld unit: INC X10 17 - Handheld unit: INC X100 18 - Handheld unit: enabledMFor the connection of distribution I/O on X301must be configured. MLFB for distribution I/O X301 Distributed I/OE-stop Limit X+ Limit X -Limit Z+ Limit Z- Ref X M1 2 3 4 56 7 8 9 10X100+ 24VTurret motor overload Reserved for other turretChuck openCoolant level lowCooling motor overload Lubrication level lowLubricating motor overload M1 2 3 4 5 6 7 8 9 10X102+24VWork lampTailstock advancing Tailstock retracting Coolant pump Lubrication pump Chuck output 1 Chuck output 2 M1 2 3 4 5 6 7 8 910X200+24VTurret motor CW Turret motor CCWReserved for other turret Reserved for other turret Gear change: low Gear change: highHandheld unit active M1 2 3 4 5 6 7 8 910X201Ref. Z T1 T2 T3 T4 T5 T6 M 12345678910X101Spindle/ inverter motor(black)blackblack blackSpindle/ inverter motorSINUMERIK 808D ADVANCED PPUSINUMERIK 808D ADVANCED PPUIn some cases, an extra language has to be selected. Double-click the “Setup.exe”During the installation various dialogue boxes will appear. The dialogue boxes should be acknowledged and where necessary installation data should be entered and confirmed.Installing all the software packages will take approximately 30 minutes. When the installation has finished icons will be placed on the desk top.Activate the PLC connection setting in 808D (password set to “sunrise”) Double click highlighted area.The connection is now established, this is shown by a green box.Status description on front LED’s of PPUIf the drive data is different from the 808D backup data, a data synchroni-zation is required for synchronizing the drive data files between the NCStatus description on SINAMICS V70 Item DescriptionStatus LED’s indicator colour RDY-GreenStatus on power up with incremental encoderStatus on power up with absolute encoderType in “SUNRISE”Type in time and date using the key-board and the andWhen the PPU shows the followingTo accept the selection.On power up of the control the current alarms 4060 and 400006 can be acknowledged with the “Reset” and “Alarm cancel” buttons Type in SUNRISESelect the language withYou can load a new system language or update an existing language on Siemens will provide each language in the form of an archive file.“Option”, a new licence key Press the SKTo active an “Option”, enter Press the SKFunctionvertical =0 - horizontal=1Spindle braking timeMax Tool number in magazineLubrication intervalLubrication durationTool magazine:spindle poisoning angleTool magazine: Preparation position of Z axes for tool changeTool magazine: Tool changing posion of Z axesTool magazine: velocity of Z axis, Go to tool change preparation positionTool magazinevelocity of Z axis, back to tool change preparation positionRange Functionality- flat bed=0 - inclined bed = 15~200 Spindle braking time4, 6 Max Tool number in turret.(for tool amount >6, PLC to beprogrammed by customer them-selves)5~30 HED turret: Tool clamping time for 30~200 HED turret: Time monitoring fortool change5~300 Lubrication interval12~2000 Lubrication durationPLC MD is to be adapted to suit the machine To continue press the SKChanges will be activated MD set to default value MD set to previous valueIt may be that the machine tool builder requires further PLC functionality, if this is required the PLC has to be modified.To install PLC programming tool, follow the information in :- PLC Subroutines manual page 8 (install PLC programming tool) To make a connection to the PPU, press SK Then follow the information in:-PLC Subroutines manual page 18To continue press the SKFirst the “Sample PLC blocks” should be uploaded to the PC, then the modifications can be made to achieve the required functionality. Once this has been completed, the PLC should be put into stop and the modified PLC should be downloaded into the PPU. The PLC must then bePLC Subroutines manual page 25To continue press the SK All I/O status must be checked with the electrical drawing using the following SK’s. The status is shown on the right hand side as shown Vertical SK’s allow you to select digital inputs or outputs and selection ofTo continue press the SKChoose digital inputChoose digital outputChoose the digital O/I addresses of Byte -Choose the digital O/I addresses of Byte +You can edit the PLC user alarm text either directly on the HMI, or off line by transferring the file using a USB stick.Vertical SK’s allow you to import and export the text file from the HMI, and SK that that allows the text file to be directly edited on the HMI.To continue press the SKImport the backup alarm text into the PPU Edit the alarm textExport the finished alarm text from the PPU Set “address data” for each axis: Remove drive bus cable from terminal X10 Press M repeatedly (until “FUnC” is displayed) Press ▼(until “Addr” is displayed) Press ▼(until desired address is displayed) Press ▼(until “SAvE” is displayed) Screen will go blank (wait about 20sec) (Screen will display “S OFF” or a fault code) Replace drive bus cable to terminal X10 Drives must now be powered off/onStarts the configuring of the V70 drive.Starts the configuration of spindle motor motors on the M3 Drive BusSelect the motor from the table that matches the motor name plate.Starts the configuring of the motor data to the drive All axis motors are indentifiedStarts the configuration of each unidentified spindleAll axis and spindle motors are indentified.You can edit the spindle machine data for the required axis.Vertical SK’s allow you to edit, activate or set as default value.MD set to default valueMD set to previous valueTo continue press the SK To continue press the SKFollowed by creating the drive dataYou can edit the axis machine data and the for the required axis. Vertical SK’s allow you to edit, activate or set as defaultUsed to select the axis (X or Z turn or X, Y, or Z mill)Changes will be activatedMD set to default valueMD set to previous valueAn axis can be referenced You can edit the spindle machine data required.Vertical SK’s allow you to edit, activate or set as defaultUsed to select the axis (X or Z turn or X, Y, or Z mill)Changes will be activatedMD set to default valueMD set to previous valueTest spindle in MDA modeVertical SK allows you to, create the “series start-up archive” press SK Create production archiveWhen creating the productionbackup, store archive to USB You can edit the axis machine data for the required axis.Vertical SK’s allow you to edit, activate or set as defaultUsed to select the axis (X or Z turn or X, Y, or Z mill)Changes will be activatedMD set to default valueMD set to previous valueYou can edit the axis machine data for the required axis.Vertical SK’s allow you to edit, activate or set as defaultUsed to select the axis (X or Z turn or X, Y, or Z mill)Changes will be activatedMD set to default valueMD set to previous value You can edit the axis machine data for the required axis.Vertical SK’s allow you to edit, activate or set as defaultUsed to select the axis (X or Z turn or X, Y, or Z mill)Used to enter compensation data via the HMIChanges will be activatedThere are three “Optimization2 Aggressive measurement3 Conservative measurementPress “Start Optim.” SK Select the required strategy.To continue press the SKThe following window will be shown.To continue press the BUTTON To continue press the BUTTONThe axis optimization operation process will now optimise MZ1 axis of highPress “Next” SK to continueand low frequency measurement process. (a repeat of the 8 passes asVertical SK allows you to, create the “production archive” press SK “Create Create Start-up archivearchive, store archive to USB。
ICP DAS ET-7065 Ethernet Remote I O 快速入门指南说明书

ET-70656 Channel Photo-Mos Relay Output and 6 ChannelDigital Input Data Acquisition ModuleQuick Start GuideThe ET-7065 is a web-based Ethernet I/O module. It features a built-in web server which allows configuration, I/O monitoring and I/O control by simply using a regular web browser. Remote control is as easy as you surfing the Internet. With the web HMI function, noprogramming or HTML skills are needed. Users can create dynamic and attractive web pages for I/O monitoring and I/O control. The ET-7065 offers easy and safely access for users from anytime and anywhere! In addition, the ET-7065 also supports Modbus/TCP protocol that makes perfect integration for ET-7000 series to SCADA software. The ET-7000 series aredesigned for applications to industrial monitoring and measurement; therefore, we have made it toughly enough to survive the harsh and rough environment. The module contains 2-wayisolation from noise and surges, one for digital inputs and the other for Ethernet. The ET-7000 has got a wide range of power input (10~30VDC) and operating temperature (-25°C~+75°C).What’s in the box?In addition to this guide, the package includes the following items:ET-7065 Module Software Utility CD- ET-7065 Websitehttps:///et_7065.html- ICP DAS USA Website /Phone : 1-310-517-9888 Email: ********************Tech Support:*******************21-----------------------------------------------------------Configuring Boot ModeInit mode: For configuration. After booting, ET-7065 will not run thedefault firmware and cannot surf the internet. Use this mode toupdate MiniOS7 image.Normal mode: For normal working. After booting, ET-7065 will run thedefault firmware and can use all ET-7065 functions.---------------------------------------------------------------------------------- Connecting to Network, PC and PowerThe ET-7065 is equipped with an RJ-45 Ethernet port for connection to an Ethernet hub/switch and PC.3 4 ---------------------------------------------------------------------------------Installing the MiniOS7 UtilityThe MiniSO7 Utility can be obtained from companion CD or our site: CD:\Napdos\minios7\utility\minios7_utility\ /minios7utility.htmlAfter the installation has been completed, there will be a new short-cut for MiniOS7 Utility on the desktop.----------------------------------------------------------------------------------Using MiniOS7 Utility to Assign a New IPThe ET-7065 are Ethernet devices, which comes with a default IP address, therefore, you must first assign a new IP address to the ET-7065. The factory default IP settings are as follows:Double-click the MiniOS7 Utility shortcut on your desktop.After pressing F12 or choosing Search from Connection menu, the MiniOS7 Scandialog will appear, that will display a list of all the MiniOS7 modules on your network.See the status tip, waiting for the search to be done.Choose the module name for fields in the list, and then choose IP setting from the toolbar.After completing the settings, press the Yes button in the Confirm dialog box to exit the procedure.56---------------------------------------------------------------------------------- Enabling Adobe Flash Player in Your BrowerYour browser must support Adobe Flash Player and have it enabled in order to use theET-7065 web site.If you do not have it installed, please go to the following website and install it.The Adobe Flash Player Download Center:/flashplayer/---------------------------------------------------------------------------------- Go to the ET-7065 Web Site to Check out FunctionsThe ET-7065 contains an advanced web configuration system that provides users with accessET-7065 applications through a standard web browser.Make sure the switch placed in the“ Normal” p osition.Then reboot ET-7065Please use a standard internet browser to view the ET-7065 webpage, such as MozillaFirefox or Internet Explorer…etc.If you haven’t changed the default IP address of the ET-7065, please refer to “4. UsingMiniOS7 Utility to Assign a New IP” to configure it.After entering the IP address, the logindialog box will appear and prompt you toenter your username and password.The factory default user name and passwordare as follows (Case sensitive) :After logging into the ET-7065 web site, the welcome page will appear.Under the Main Menu, expand the Web HMI, andthen select the Web HMI option to check the values of the data acquisition.。
震旦ERP终端用户培训手册

自主学习
提供学习资料和操 作手册,供终端用 户自主学习
02 震旦erp系统概述
系统简介
震旦erp系统是一款集财务管理、供应链管理、生产管理、营销管理、人力资源管理 等众多功能于一体的企业资源计划管理系统。
该系统旨在帮助企业实现资源整合、流程优化、信息共享,提高运营效率和管理水 平。
震旦erp系统采用先进的软件技术,具有良好的可扩展性和可定制性,可根据企业需 求进行个性化配置。
采购员还需关注供应商的交货期、质 量、价格等方面的变化,及时作出响 应,维护企业利益。
销售员角色与职责
销售员是企业与客户之间的桥梁,负责与客户建立联系、 了解客户需求、推广产品和服务。
销售员需与生产、物流等部门保持密切沟通,确保产品 供应和交货期的准确性。
销售员需根据市场情况和客户需求,制定销售计划,完 成销售任务,提高销售额和客户满意度。
据。
销售常见问题与解决方案
销售订单无法创建
检查客户信息是否完整,以及销售报价单 是否已审批通过。
销售发票无法关联
检查发票是否已审核,并与销售订单进行 关联。
销售出库单无法匹配
确认销售订单是否已审核,并检查出库单 的匹配条件是否正确。
解决方案
确保客户信息完整准确,销售报价单审批 流程顺畅,正确设置匹配条件,及时审核 相关单据。
培训对象
01
震旦集团内部使用震旦erp系统的 终端用户
02
包括但不限于销售、采购、库存 、财务等部门的工作人员
培训方式与时间安排
时间安排
为期一周,每天8小 时,共计40小时
线下培训
邀请专业讲师进行 现场授课,并进行 实际操作演练
培训方式
线上培训、线下培 训、自主学习
三星471 482贴片机培训

2021/10/10
4
3、子菜单:供料器(F4)
菜单功能: 1、可以编辑/和查看
每一站供料器的 用料种类和规格; 2、可以矫正飞达、 振动飞达、Tray 盘的取料位置。
2021/)
菜单功能: 1、查看/编辑元件的
贴装位置、种类、 规格、贴装角度、 贴装步骤、使用 吸嘴; 2、矫正元件的贴装 位置。
17
2021/10/10
3、子菜单:拷贝
菜单功能:
1、 <PCB文件之 间烤贝数据>命 令执行与<新的 > 命令的<浏 览…>类似的功 能,但它不建 立新的PCB文 件,而是把已 经有的PCB文 件的内容拷贝 在拷贝对象文 件内。
18
4、子菜单:文件管理
菜单功能: 1、 点击选择文件
属性领域扩展名 文件按钮,就会 列出相关内容的 文件 。
2021/10/10
24
3、子菜单:亮度
菜单功能: 1、检查安装在移
动照相机, 飞行 照相机固定照相
机的照明装置 。
2021/10/10
25
4、子菜单:真空
菜单功能: 1、检查头的真空 压缩状态。
2021/10/10
26
5、子菜单:控制器
菜单功能: 1、检查Teaching Box 的动作。
2021/10/10
22
1、子菜单:I/O
菜单功能: 1、 ‘I/O’子菜 单执行设定或表 示设备的各种I/O (输入/输出)传感 器的状态的功能。 选择此按钮时显
示如左的对话框。
2021/10/10
23
2、子菜单:传送装置
菜单功能: 1、 检测贴装位 置上是否有 PCB板,报基 板搬送错误时 可以在此菜单 取消错误基板。
2024年烧录培训教程

烧录培训教程一、引言随着科技的发展,数字存储和传输已成为人们日常生活的重要组成部分。
烧录技术作为一种重要的数据存储和传输方式,广泛应用于光盘、U盘、移动硬盘等多种存储设备。
本教程旨在帮助读者了解烧录的基本概念、掌握烧录软件的使用方法,并学会如何解决烧录过程中遇到的问题。
二、烧录基本概念1.烧录:烧录是指将数据从计算机传输到可写存储设备(如光盘、U盘等)的过程。
烧录过程中,数据被写入存储设备的存储介质中,以便长期保存或传输。
2.可写存储设备:可写存储设备是指可以进行数据写入操作的存储设备,如CD-R、CD-RW、DVD-R、DVD-RW、U盘、移动硬盘等。
3.刻录机:刻录机是一种用于将数据烧录到可写存储设备的硬件设备。
刻录机通常分为内置式和外置式两种,根据接口类型可分为USB接口、IEEE1394接口等。
4.烧录软件:烧录软件是用于控制刻录机进行数据烧录的计算机程序。
常见的烧录软件有Nero、Ashampoo、EaseUS等。
三、烧录软件的使用方法1.安装烧录软件:在计算机上安装一款烧录软件。
安装过程通常包括安装包、运行安装程序、按照提示完成安装等步骤。
2.准备可写存储设备:将可写存储设备插入计算机的USB接口或其他接口,确保设备已正确连接并识别。
3.打开烧录软件:在计算机上运行烧录软件,进入主界面。
4.添加文件:在烧录软件中,“添加文件”或“添加文件夹”按钮,选择需要烧录的文件或文件夹。
支持多种文件格式,如文档、图片、音乐、视频等。
5.设置烧录参数:在烧录软件中,根据需要设置烧录速度、数据格式、刻录份数等参数。
一般来说,烧录速度不宜过快,以免影响烧录质量。
6.开始烧录:确认烧录参数无误后,“开始烧录”或“刻录”按钮,开始烧录过程。
烧录过程中,请勿移动存储设备,以免造成烧录失败。
7.完成烧录:烧录完成后,软件会提示烧录成功。
此时,可以安全地移除存储设备。
四、常见问题及解决方法1.烧录失败:检查存储设备是否正常,刻录机是否连接正确,刻录软件是否兼容。
chiplet系统功能分解流程

chiplet系统功能分解流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!深入理解Chiplet系统:功能分解与流程解析在当前的半导体行业中,Chiplet技术已经成为高性能计算和数据中心领域的新宠。
ChipAnalyzer培训教程

• • •
20
工作区管理
• 工作区分类
– – – 在工作区列表或者任意文件夹上点击右键菜单选择创建文件夹 在工作区列表中的文件夹上点击右键菜单选择修改文件夹 点击并拖拉一个工作区可以使它移入或移出文件夹
•
发送单元
– 在单元列表中的被选中的单元上点击右键选择发送单元模板
21
工作区管理
• 合并工作区
15工程控制面板工程控制面板常用的显示功能图标16工程控制面板工程控制面板17图像提取流程图像提取流程在层次化模式的工作区中每个模块都应该以宏单元形式合并到顶层在顶层网表中也可以有一些基本的模拟器件或数字单元18图像提取流程图像提取流程在打平模式工作区中合并全部模块线网到顶层在层次化模式工作区中合并全部模块的宏单元到顶层导出顶层网表工作区的网表到hierux软件生成顶层电路图19agendaagenda导入与导出20工作区管理工作区管理使用工程复制工作区复制工作区时可以选择是否复制工作区数据转换工作区21工作区管理工作区管理在单元列表中的被选中的单元上点击右键选择发送单元模板22工作区管理工作区管理平面化模式全部的元素都会被合并到目标工作区层次化模式将会在当前工作区中创建一个新单元单元大小与当前工作区相同这个单元的pin脚是从当前工作区的外部端口转换而来在对话框中配置工作区和单元模板的对应关系23agendaagenda导入与导出24单元提取单元提取单元的名称pin的名称和pin的方向必须保证一致25单元提取单元提取大多数的工程中都含有数字单元这些单元由模拟器件和全局信号符号构成例如vddgndpmosnmos等等invbufnandandnororaoiaooaioamuxlatchdffrsadderxorxnor等等26单元提取单元提取由一个
7
In-Situ Data Center用户指南说明书
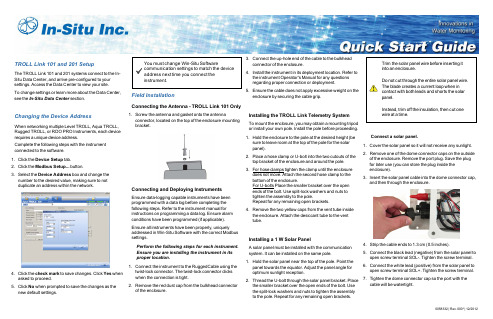
0058332|Rev.000*|12/2012TROLL Link 101and 201SetupThe TROLL Link 101and 201systems connect to the In-Situ Data Center,and arrive pre-configured to your settings.Access the Data Center to view your site.To change settings or learn more about the Data Center,see the In-Situ Data Center section.Changing the Device AddressWhen networking multiple Level TROLL,Aqua TROLL,Rugged TROLL,or RDO PRO Instruments,each device requires a unique device address.Complete the following steps with the instrument connected to the software.1.Click the Device Setup tab.2.Click the Modbus Setup...button.3.Select the Device Address box and change the number to the desired value,making sure to not duplicate an address within thenetwork.4.Click the check mark to save changes.Click Yes when asked to proceed.5.Click No when prompted to save the changes as the new defaultsettings.You must change Win-Situ Softwarecommunication settings to match the device address next time you connect the instrument.Field InstallationConnecting the Antenna -TROLL Link 101Only1.Screw the antenna and gasket onto the antennaconnector,located on the top of the enclosure mounting bracket.Connecting and Deploying InstrumentsEnsure data-logging capable instruments have been programmed with a data log before completing the following steps.Refer to the instrument manual for instructions on programming a data log.Ensure alarm conditions have been programmed (if applicable).Ensure all instruments have been properly,uniquely addressed in Win-Situ Software with the correct Modbus settings.Perform the following steps for each instrument.Ensure you are installing the instrument in its proper location.1.Connect the instrument to the RuggedCable using the twist-lock connector.The twist-lock connector clicks when the connection is tight.2.Remove the red dust cap from the bulkhead connector of the enclosure.3.Connect the up-hole end of the cable to the bulkhead connector of the enclosure.4.Install the instrument in its deployment location.Refer tothe instrument Operator's Manual for any questions regarding proper connection or deployment.5.Ensure the cable does not apply excessive weight on the enclosure by securing the cable grip.Installing the TROLL Link Telemetry SystemTo mount the enclosure,you may obtain a mounting tripod or install your own pole.Install the pole before proceeding.1.Hold the enclosure to the pole at the desired height (be sure to leave room at the top of the pole for the solar panel).2.Place a hose clamp or U-bolt into the two cutouts of the top bracket of the enclosure and around the pole.3.For hose clamps tighten the clamp until the enclosuredoes not move.Attach the second hose clamp to the bottom of the enclosure.For U-bolts Place the smaller bracket over the open ends of the e split-lock washers and nuts to tighten the assembly to the pole.Repeat for any remaining open brackets.4.Remove the two yellow caps from the vent tube inside the enclosure.Attach the desiccant tube to the vent tube.Installing a 1W Solar PanelA solar panel must be installed with the communication system.It can be installed on the same pole.1.Hold the solar panel near the top of the pole.Point the panel towards the equator.Adjust the panel angle for optimum sunlight reception.2.Thread the U-bolt through the solar panel bracket.Placethe smaller bracket over the open ends of the ethe split-lock washers and nuts to tighten the assembly to the pole.Repeat for any remaining open brackets.Trim the solar panel wire before inserting it into an enclosure.Do not cut through the entire solar panel wire.The blade creates a current loop when in contact with both leads and shorts the solar panel.Instead,trim off the insulation,then cut one wire at a time.Connect a solar panel.1.Cover the solar panel so it will not receiveany sunlight.2.Remove one of the dome connector caps on the outside of the enclosure. Remove the port plug.Save the plug for later use (you can store the plug inside the enclosure).3.Insert the solar panel cable into the dome connector cap,and then through the enclosure.4.Strip the cable ends to 1.3cm (0.5inches).5.Connect the black lead (negative)from the solar panel to open screw terminal SOL-.Tighten the screw terminal.6.Connect the white lead (positive)from the solar panel to open screw terminal SOL+.Tighten the screw terminal.7.Tighten the dome connector cap so the port with thecable will be watertight.Information subject to change without notice.In-Situ,In-Situ logo,BaroMerge,BaroTROLL,HERMIT,iSitu,Pocket-Situ,RDO,RuggedCable,RuggedReader,TROLL,and Win-Situ are trademarks or registered trademarks of In-Situ Inc.©2013.All rights reserved.Installing a 10or 20W Solar Panel and External Battery KitPlease refer to the TROLL Link Manual for instructions on installing a 10or 20W Solar Panel and External Battery Kit.Installing a Battery1.Install batteries with the terminals oriented toward thetop of the enclosure.2.Plug the black (negative)leads into the black terminals of the batteries first.Ensure that the terminal does not sit between the lead clip and the plastic sheath,but that the lead clip encompasses the batteryterminal.3.Plug the red (positive)leads into the red batteryterminals.Ensure that the terminal does not sit between the lead clip and the plastic sheath,but that the lead clip encompasses the battery terminal.TROLL Link 101and 201WiringDiagramNumberFunction Wire1DC Com (-)Bulkhead black wire;solar panel black wire 2RS485(-)Bulkhead green wire3RS485ground 4RS485(+)Bulkhead blue wire5DC (+)Bulkhead red wire;fuse blueNumber Function Wire wireAccessing the Data CenterNote that it may take up to an hour for data to betransmitted to the Data Center,depending on the data service package you have.1.Open a Web browser.2.Enter the URL:3.Enter your User ID and Password supplied by In-Situ.Click Login .4.The Site Index appears.The Site Index displays the sitename,most recent message received date,number of devices at the site,and the alarm status.5.Click a site name to view more data from that site.6.Select a Device to view more data from that device.If the next transmission interval has not occurred,you should confirm that communication from all devices in the network has been successful.1.Ensure all components of the TROLL Link Telemetry System have power applied.2.From the Site Index,click the site name.3.Click the first device listed.4.Select Manage Device under the Site Managementheading in the left navigation bar.5.Select View Config Messages under the Device Config heading in the left navigation bar.If data does not refresh at the expected rate or the site does not display the network,contact technical support.MaintenanceFuse ReplacementTwo fuses are located on the left edge inside of theenclosure.The left fuse connects to the internal battery,the right fuse connects to the charger/external power.The fuses are 2amp,time-delay,speed-type fuses rated for 250VAC.Replace as needed.Enclosure DesiccantIt is extremely important to use a properly-sizeddesiccant for your deployment,and to change desiccant before the entire volume has turned pink .Useenough desiccant to effectively keep electronics dry until your next scheduled maintenance.Desiccant life span is dependent on site conditions.The enclosure contains one tube of desiccant that absorbs moisture as it enters the enclosure through the vent tube.Keep the vent tube clear of obstructions.Replace as needed.An additional desiccant pack may be located at the top of the enclosure.Replace or dry as needed.CleaningClean the outside of the enclosure with a soft,damp cloth.Do not use ammonia or other harsh chemicals.。
ICT培训课程(2024)

课程时间表根据学员需求和实际情况进 行灵活安排,确保学员能够充分学习和 掌握相关技能。
案例分析则通过讲解实际案例,引导学 员分析和解决问题,培养创新思维和实 践能力。
2024/1/29
理论授课主要讲解ICT领域的基本概念和 原理,引导学员建立系统化的知识框架 。
实践操作通过上机实验和模拟演练等方 式,让学员亲身体验和掌握相关技能。
输入设备(键盘、鼠标等)
向计算机输入数据和命令。
输出设备(显示器、打印机等)
将计算机处理后的结果呈现出来。
8
操作系统基本概念与功能
01
02
03
操作系统定义
是一组控制和管理计算机 软硬件资源、合理组织计 算机工作流程以及方便用 户使用的程序的集合。
2024/1/29
操作系统功能
包括进程管理、内存管理 、文件系统管理、设备管 理等。
分析人工智能技术的最新发展趋势,如深度学习、自然语言处理、计算机视觉 等。
在各领域应用前景
探讨人工智能在智能制造、智慧城市、智慧医疗、智慧教育等领域的应用前景 和潜在价值。
2024/1/29
26
THANKS
感谢观看
2024/1/29
27
21
企业数据安全管理制度了解
1 2
企业数据安全的重要性
认识企业数据安全对于企业经营和客户信任的重 要性,了解数据泄露可能带来的严重后果。
数据安全管理制度
学习企业数据安全管理制度的核心内容和实施要 求,如数据加密、数据备份、访问控制等。
员工安全意识培养
3
了解企业在员工安全意识培养方面的措施和要求 ,如定期的安全培训、安全意识考核等,以提高 员工整体的安全防范能力。
SEED TI C2000 培训教材(4)

CAN 位定时寄eserved 11 10 9 8 7 SAM 6 TSEG1 3 2 TSEG2 0 reservedSJW
同步跳跃宽度 (SJW)
Time Segment 1( tseg1)
sjw TQ SJW 1)
1个时间量个时间量tqtqpropsegpropseg补偿网络内的物理延迟时间补偿网络内的物理延迟时间总线上信号传播时间输入比较器延迟和输出比较器延迟之和的总线上信号传播时间输入比较器延迟和输出比较器延迟之和的22倍倍可编程可编程1188个个tqtqphaseseg1phaseseg1补偿上升沿相位偏移补偿上升沿相位偏移可编程可编程1188个个tqtqphaseseg2phaseseg2补偿下降沿相位偏移补偿下降沿相位偏移可编程可编程2288个个tqtqcancan位时配置位时配置tseg1phaseseg1tseg1phaseseg1tseg2phaseseg2tseg2phaseseg2tqtqsyncsegcan标称位时tqtseg2can标称位时syncsegsjwsjwtseg2tseg1tqsamplepointtransmitpointcancan位时配置位时配置当决定个比特位段时要遵守当决定个比特位段时要遵守cancan位定时规则位定时规则
邮箱号(MBNR) 1=MBNR.4只用于ECAN模式,对 SCC保留 0=CPU请求对其数据区写操作
自测试模式 (STM):EALLOW保护 0 = 正常模式 1 = 模块自己产生应答信号
CAN 位时配置
CAN协议规范把名义上的(位时间)分割成4个不同的时间段:
SYNC_SEG
用来同步总线上不同的节点 长度 : 1个时间量(TQ)
CAN 发送请求置位寄存器 (CANTRS) – 0x006004
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
将PC的HostID提供给CELLIX负责人并获取 说明:如果PC上安装了多于一个网卡,一定要选取本地连接的那一个
Hale Waihona Puke 5目录• • • • 软件安装 获取License 运行ChipDatacenter 存放图像数据和工程数据
6
运行ChipDatacenter
• 手动运行ChipDatacenter – 打开ChipLogic Family文件夹,运行ChipDatacenter -> Bin -> ChipDatacenter.exe应 用程序 – 如果不能通过license认证,应该将服务器的host ID信息转发到Cellix,得到更新的 license 文件 服务器系统运行ChipDatacenter – 打开ChipLogic Family文件夹,运行ChipDatacenter -> Bin -> ChipSvcCtl.exe应用程 序,然后选择“注册服务” – 重新启动计算机或者重启服务后,ChipDatacenter就在后台运行了
•
7
目录
• • • • 软件安装 获取License 运行ChipDatacenter 存放图像数据和工程数据
8
存放图图像数据和工程数据
• 从cellix拿到的图像数据解压后有Image和Project两个文件,我们只需要将 Image下的文件放到ChipDatacenter下的Image文件夹中,同样,Project下的 文件放到ChipDatacenter下的Project文件夹中。
ChipDataenter服务端
1
目录
• • • • 软件放置 获取License 运行ChipDatacenter 存放图像数据和工程数据
2
软件放置
• • 复制ChipLogic软件到PC上, 软件放置的根目录中不要有汉字 ChipLogic软件不需要安装,只需要License认证就可以运行
3
9
目录
• • • • 软件安装 获取License 运行ChipDatacenter 存放图像数据和工程数据
4
获取License
• 首先查看ChipDatacenter 服务端PC的HostID (MARC地址) – 在DOS窗口中输入 ipconfig –all查看 HostID,如右图:
• •