步进伺服电机选型计算V1.1
伺服电机的选型计算及应用案例介绍

伺服电机的选型计算及应用案例介绍伺服电机是一种能够精确控制转速和位置的电动机,广泛应用于工业自动化领域。
选型计算是确定伺服电机规格和性能的过程,通常涉及到转矩、转速、功率、惯量等参数的综合考虑。
1.确定负载要求:首先需要明确伺服电机所驱动的负载的要求,包括所需转矩、转速和精度等。
2.计算转矩需求:根据负载要求,可以通过转矩计算公式来估算所需的转矩。
常用的转矩计算公式为:转矩=负载惯量x加速度角加速度+负载转矩其中,负载惯量是指负载的惯性矩,加速度角加速度是指负载加速度的转矩。
3.计算转速需求:根据负载要求,可以通过转速计算公式来估算所需的转速。
常用的转速计算公式为:转速=转矩/转矩常数其中,转矩常数是伺服电机的特性参数,代表单位转矩所需要的电压或电流。
4.确定功率需求:根据转矩和转速需求,可以计算出所需的功率。
功率可以通过转速和转矩的乘积来计算。
功率=转矩x转速5.确定惯量需求:根据负载的惯性矩和转矩需求,可以计算出所需的惯性矩。
惯性矩可以通过负载的质量和尺寸来计算。
以上是伺服电机选型计算的基本步骤,具体的选型还需要考虑其他因素,如环境温度、耐用性、可靠性等。
下面以一个应用案例来介绍伺服电机的选型计算。
假设有一个机械臂需要驱动,臂长为1米,质量为10千克。
机械臂需要能够承受10牛米的转矩,并以每分钟100转的速度旋转。
根据这些要求,可以使用以下公式计算伺服电机的规格和性能。
负载惯量=质量x(臂长^2)转矩需求=负载惯量x加速度角加速度+负载转矩加速度角加速度=转速/时间转速=100转/分钟负载转矩=10牛米根据以上参数,可以计算出负载惯量、加速度角加速度、转矩需求等。
假设加速时间为1秒,则有:加速度角加速度=(100转/分钟)/(60秒/分钟)/(1秒)=1.67转/秒^2负载惯量=10千克x(1米^2)=10千克·米^2转矩需求=10千克·米^2x(1.67转/秒^2)+10牛米=26.7牛米根据转矩需求和伺服电机的特性参数,可以选择合适的伺服电机。
步进电机选型计算方法

步进电机选型计算方法步进电机是一种能将输入脉冲信号转化为角位移的电机。
它具有结构简单、控制精度高、启动扭矩大等优点,广泛应用于机械系统中的定位控制、速度调节、角度控制等领域。
在选型过程中,需要考虑步进电机的型号、参数和性能等因素。
本文将介绍步进电机选型的计算方法。
步进电机的型号和参数步进电机通常由两个参数决定,即步距角和相数。
步距角指的是电机每接受一个脉冲信号所转动的角度。
常见的步距角有 1.8度(200步/转)和0.9度(400步/转)两种。
步距角越小,电机的定位精度越高。
相数指的是电机的相数,常见的有2相、4相、6相等。
相数越多,电机的转矩平稳性越好。
步进电机的性能步进电机的性能包括静态转矩、动态转矩、最大转速等指标。
静态转矩是指电机在静止状态下能够提供的最大转矩,动态转矩是指电机在运转过程中能够提供的最大转矩。
最大转速是指电机能够达到的最高转速。
选型时需根据具体的应用需求来确定这些指标。
步进电机的负载特性负载特性包括电机扭矩-速度曲线和转动惯量。
电机扭矩-速度曲线描述了电机在不同速度下的输出扭矩和输入电流的关系,可以用来评估电机的运行稳定性。
转动惯量描述了电机转动时的惯性大小,通常是根据系统的加速度和位置控制要求来确定的。
步进电机的选型计算方法主要包括定位精度、动态响应性能以及转矩要求三个方面。
1.定位精度计算步进电机的定位精度受到步距角、齿距、电机的误差等因素的影响。
根据具体的应用需求,可以采用以下公式来计算定位精度:定位精度=N*U/360其中,N为步数(一转的步数),U为脉冲数2.动态响应性能计算动态响应性能主要包括加速度曲线和最大速度两个方面。
加速度曲线是根据系统的加速度和行程要求来确定的。
最大速度则取决于电机的最大转速和负载特性。
3.转矩要求计算转矩要求主要是根据负载的特性来确定的。
计算转矩要求时需要考虑负载的惯性、摩擦力、载荷等因素。
综合考虑以上因素,可以选择合适的步进电机。
通常情况下,需要进行多个步进电机比较和试验,以找到最适合应用需求的电机。
伺服电机步进电机丝杠导轨的计算选择
伺服电机的选择伺服电机:伺服主要靠脉冲来定位,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移;可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。
伺服电机的精度决定于编码器的精度(线数)。
闭环半闭环:格兰达的设备用伺服电机都是半闭环,只是编码器发出多少个脉冲,无法进行反馈值和目标值的比较;如是闭环则使用光栅尺进行反馈。
开环步进电机:则没有记忆发出多少个脉冲。
伺服:速度控制、位置控制、力矩控制增量式伺服电机:是没有记忆功能,下次开始是从零开始;绝对值伺服电机:具有记忆功能,下次开始是从上次停止位置开始。
伺服电机额定速度3000rpm,最大速度5000 rpm;加速度一般设0.05 ~~ 0.5s计算内容:1.负载(有效)转矩T<伺服电机T的额定转矩2.负载惯量J/伺服电机惯量J< 10 (5倍以下为好)3.加、减速期间伺服电机要求的转矩 < 伺服电机的最大转矩4.最大转速<电机额定转速伺服电机:编码器分辨率2500puls/圈;则控制器发出2500个脉冲,电机转一圈。
1.确定机构部。
另确定各种机构零件(丝杠的长度、导程和带轮直径等)细节。
典型机构:滚珠丝杠机构、皮带传动机构、齿轮齿条机构等2.确定运转模式。
(加减速时间、匀速时间、停止时间、循环时间、移动距离)运转模式对电机的容量选择影响很大,加减速时间、停止时间尽量取大,就可以选择小容量电机3.计算负载惯量J和惯量比(xkg.)。
根据结构形式计算惯量比。
负载惯量J/伺服电机惯量J< 10 单位(xkg.)计算负载惯量后预选电机,计算惯量比4.计算转速N【r/min】。
根据移动距离、加速时间ta、减速时间td、匀速时间tb计算电机转速。
伺服电机详细计算选型

5
·对负载惯量的限制 电机的惯量应不小 于 3 倍的负载惯量
1.2 加速力矩的计算 计算加速力矩:步骤 1 ·直线加 /减速
α电机的选择
负载惯量对电机的控制特性和快速移动的加/减速时间都有 很大影响。负载惯量增加时,可能出现以下问题:指令变化 后,需要较长的时间达到新指令指定的速度。若机床沿着两 个轴高速运动加工圆弧等曲线,会造成较大的加工误差。 负载惯量小于或等于电机的惯量时,不会出现这些问题。若 负载惯量为电机的 3 倍以上,控制特性就会降低。实际上这 对普通金属加工机床的工作的影响不大,但是如果加工木制 品或是高速加工曲线轨迹,建议负载惯量要小于或等于电机 的惯量。(条件 6) 如果负载惯量比 3 倍的电机惯量大的多,则控制特性将大大 下降。此时,电机的特性需要特殊调整。使用中应避免这样 大的惯量。若机械设计出现这种情况,请与 FANUC 联系。
Jb=0.78×10-6Db4Lb (kgf.cm.s2)
例如: 滚珠丝杠的 Db 为 32mm,Lb 为 1000mm,其惯量为 Jb
为: Jb = 0.78×10-6×3.24×100 = 0.0082(kgf.cm.s2)
注:1kg.m2=100/9.8 kgf.cm.s2
·沿直线运动物体(工
6
α电机的选择
例子: 在下列条件下进行直线加/减速: 电机为α2/3000。首先计算电机和负载惯量,然后计算
加 速 转 矩 。 电 机 惯 量 Jm 为 0.0061(kgf.cm.s2) , Vm 为 3000(min-1),ta 为 0.1(s),ks 为 30(sec-1),JL=0.0247(kgf.cm.s2)。
伺服电机选型通用计算公式

9预选伺服电机的确认
所需要加速转矩确认 TP=2Л nM(JM+JL)/60ta +TL 所需要减速转矩确认 TS=2Л nM(JM+JL)/60td -TL 转矩有效值确认 Trms2=(TP2ta+TL2tc+Ts2td)/t 0.486054898 计算值 1.236262156 0.369312404
1 机器规格
序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 名称 负载速度 直线运动部分重量 滚珠丝杠长度 滚珠丝杠直径 滚珠丝杠导程 滚珠丝杠密度 减速比 直线运动外部力 齿轮+联轴器 转动惯量 摩擦系数 综合机械效率 加速时间 减速时间 运行时间 周期时间 符号 VL m LB dB PB ρ R F JG μ η ta tb tc t 数值 15 250 1 0.02 0.01 7870 2 0 0.00004 0.2 0.9 0.1 0.1 1 1.5 单位 m/min kg m m m kg/m3 N kg・㎡ s s s s 2s最大定位完成45mm
5、11、21、33
`2速度线图
加速时间 减速时间 运行时间 周期时间 负载轴转速 电机轴速度计算值 电机轴速度选择 TL=(9.8μ m+F)*PB/(2Л Rη ) 负载转矩计算值 ta tb tc t 0.1 0.1 1 1.5 s s s s min-1 min-1 min-2 N.m 0.433474876
`6负载行走功率 `7负加速功率 8伺服电机预选
计算值 0.433474876 362.255569 3000 0.000229365 200 3000 0.637 2.23 0.0000263 0.000394 最大值 2.23 最大值 2.23 额定转矩 0.637 额定输出 额定转速 额定转矩 、最大转矩 电机转子转动惯量 容许负载转动惯量
伺服电机选型计算方式及注意事项

伺服电机选择的时候,首先一个要考虑的就是功率的选择。
一般应注意以下两点:1、如果电机功率选得过小。
就会出现“小马拉大车”现象,造成电机长期过载,使其绝缘因发热而损坏,甚至电机被烧毁。
2、如果电机功率选得过大。
就会出现“大马拉小车“现象,其输出机械功率不能得到充分利用,功率因数和效率都不高,不但对用户和电网不利。
而且还会造成电能浪费。
也就是说,电机功率既不能太大,也不能太小,要正确选择电机的功率,必须经过以下计算或比较:P=:F*V/100(其中P是计算功率,单位是KW,F是所需拉力,单位是N,V是工作机线速度m/s)此外。
最常用的是采用类比法来选择电机的功率。
所谓类比法,就是与类似生产机械所用电机的功率进行对比。
具体做法是:了解本单位或附近其他单位的类似生产机械使用多大功率的电机,然后选用相近功率的电机进行试车。
试车的目的是验证所选电机与生产机械是否匹配。
验证的方法是:使电机带动生产机械运转,用钳形电流表测量电机的工作电流,将测得的电流与该电机铭牌上标出的额定电流进行对比。
如果电功机的实际工作电流与铭脾上标出的额定电流上下相差不大,则表明所选电机的功率合适。
如果电机的实际工作电流比铭牌上标出的额定电流低70%左右。
则表明电机的功率选得过大,应调换功率较小的电机。
如果测得的电机工作电流比铭牌上标出的额定电流大40%以上。
则表明电机的功率选得过小,应调换功率较大的电机。
实际上应该是考虑扭矩(转矩),电机功率和转矩计算公式。
即T=9550P/n式中:P一功率,kW;n一电机的额定转速,r/min;T一转矩,Nm。
电机的输出转矩一定要大于工作机械所需要的转矩,一般需要一个安全系数。
机械功率公式:P=T*N/97500P:功率单位W;T:转矩,单位克/cm;N:转速,单位r/min。
伺服电机选型的注意事项1、有些系统如传送装置,升降装置等要求伺服电机能尽快停车,而在故障、急停、电源断电时伺服器没有再生制动,无法对电机减速。
步进电机的选型及计算方法

步进电机选型的计算方法步进电机选型表中有部分参数需要计算来得到。
但是实际计算中许多情况我们都无法得到确切的机械参数,因此,这里只给出比较简单的计算方法。
一、驱动模式的选择驱动模式是指如何将传送装置的运动转换为步进电机的旋转。
下图所示的驱动模式包括了电机的加/减速时间,驱动和定位时间,电机的选型基于模式图。
●必要脉冲数的计算必要脉冲数是指传动装置将物体从起始位置传送到目标位置所需要提供给步进电机的脉冲数。
必要脉冲数按下面公式计算:必要脉冲数=物体移动的距离距离电机旋转一周移动的距离×360 o步进角●驱动脉冲速度的计算驱动脉冲速度是指在设定的定位时间中电机旋转过一定角度所需要的脉冲数。
驱动脉冲数可以根据必要脉冲数、定位时间和加/减速时间计算得出。
(1)自启动运行方式自启动运行方式是指在驱动电机旋转和停止时不经过加速、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。
自启动运行方式通常在转速较低的时候使用。
同时,因为在启动/停止时存在一个突然的速度变化,所以这种方式需要较大的加/减速力矩。
自启动运行方式的驱动脉冲速度计算方法如下:驱动脉冲速度[Hz]= 必要脉冲数[脉冲] 定位时间[秒](2)加/减速运行方式加//减速运行方式是指电机首先以一个较低的速度启动,经过一个加速过程后达到正常的驱动脉冲速度,运行一段时间之后再经过一个减速过程后电机停止的运行方式。
其定位时间包括加速时间、减速时间和以驱动脉冲速度运行的时间。
加/减速时间需要根据传送距离、速度和定位时间来计算。
在加/减速运行方式中,因为速度变化较小,所以需要的力矩要比自启动方式下的力矩小。
加/减速运行方式下的驱动脉冲速度计算方法如下:驱动脉冲速度[Hz]= 必要脉冲数-启动脉冲数[Hz]×加/减速时间[秒] 定位时间[秒]-加/减速时间[秒]二、电机力矩的简单计算示例必要的电机力矩=(负载力矩+加/减速力矩)×安全系数●负载力矩的计算(TL)负载力矩是指传送装置上与负载接触部分所受到的摩擦力矩。
伺服电机选型计算

伺服电机选型计算
1.负载惯量计算
负载惯量是指负载的转动惯量,计算方式为质量乘以质心距离平方。
负载惯性大会对电机的加速度和精度要求产生一定的影响。
伺服电机需要
具备足够的能力来加速和控制负载。
负载惯量的计算公式为:
J=m*r^2
其中,J表示负载的转动惯量,m表示负载的质量,r表示负载的质
心距离。
根据实际情况确定负载的质量和质心距离,可以估算负载的转动惯量。
2.加速度计算
加速度是指负载达到一定速度所需的时间。
加速度较大可以提高生产
效率,但可能会引起震动和噪音。
确定合适的加速度需要根据应用需要进
行权衡。
加速度的计算公式为:
a=(ωf-ωi)/t
其中,a表示加速度,ωf表示最终速度,ωi表示初始速度,t表示
加速时间。
3.扭矩计算
扭矩是伺服电机提供的力矩,其大小决定了电机的最大负载能力。
根据应用需求可以计算出负载所需的最大扭矩。
扭矩的计算公式为:
T=J*α
其中,T表示所需的最大扭矩,J表示负载的转动惯量,α表示加速度。
4.功率计算
功率是指电机输出的机械功率,也是伺服电机选型的一个重要参数。
根据应用需求可以计算出对应负载的最大功率。
功率的计算公式为:
P=M*ω
其中,P表示功率,M表示扭矩,ω表示角速度。
5.速度计算
速度是指电机的转速,根据应用需求可以计算出所需的最大速度。
速度的计算公式为:
V=ω*r
其中,V表示速度,ω表示角速度,r表示负载的质心距离。
伺服电机选型计算公式

伺服电机选型计算公式伺服电机选型计算公式是指通过一系列的计算公式来确定伺服电机的合适参数,以满足特定需求。
伺服电机选型的主要目标是确定伺服电机的额定转矩、额定电流、额定功率等参数,以及选择合适的伺服驱动器。
下面将介绍一些常用的伺服电机选型计算公式。
1.负载的转矩计算公式:负载的转矩是伺服电机选型的基础,通过计算负载的转矩,可以确定伺服电机的额定转矩。
负载的转矩可以通过以下公式计算:负载转矩=(负载力*负载半径)/(传动效率*减速比)2.伺服电机的额定转矩计算公式:伺服电机的额定转矩是指在额定转速下,电机能够提供的最大转矩。
额定转矩可以通过以下公式计算:额定转矩=(负载转矩+加速扭矩)/传动效率3.伺服电机的额定电流计算公式:伺服电机的额定电流是指在额定转矩下,电机所需的额定电流。
额定电流可以通过以下公式计算:额定电流=额定转矩*电流系数/额定转速4.伺服电机的额定功率计算公式:伺服电机的额定功率是指在额定转矩和额定转速下,电机所提供的对外功率。
额定功率可以通过以下公式计算:额定功率=额定转矩*额定转速/9.555.伺服驱动器的额定功率计算公式:伺服驱动器的额定功率是指驱动器所能提供的最大功率。
额定功率可以通过以下公式计算:额定功率=伺服电机的额定功率/驱动器的效率除了上述几个常用的伺服电机选型计算公式外,还需要考虑一些其他因素,例如:负载的加速时间、负载的惯性矩、伺服系统的控制精度等,这些因素都会对伺服电机的选型产生影响,需要综合考虑。
同时,还需要根据具体的应用环境和需求,选择合适的伺服电机和驱动器型号,以确保系统的性能和可靠性。
需要注意的是,伺服电机选型计算公式只是一个参考,实际选型过程中还需要考虑一系列的工程参数和实际情况,同时也需要借助一些专业的伺服电机选型软件,以更准确地确定伺服电机的参数。
步进伺服电机选型计算V1.1(实用版)

圆周率PI 3.141593 F= 轴方向负载(N) F0= 预负载(N)(≈1/3 F)
μ0= 预压螺帽的内部摩擦系数(0.1-0.3) 机械效率 (0.85-
η= 0.95) 减速比 (机构的
i= 减滚速珠比螺)杆 PB= 螺距
FA= 外主力轴(开N)始 FB= 运(F动B=弹时簧的
滚珠螺杠驱动下负载转矩
TL ( FPB F 0PB ) 1[Nm] 2 2 i
F FA mg(sin a cos a)[N]
滑轮驱动下负载转矩
TL FA mg D
2
i
FA mg)D[Nm] 2i
金属线、皮 带 齿轮、 齿条驱动下 负载转矩
TL F D FD[Nm] 2 i 2i
秤值
m= 工作物与工作台的总质量(kg) 滑动面的 摩擦系数
μ= (0.05) 倾斜角度
a= (°) 终段滑轮 直径
D= (m)
—— 重计力算加不速同驱动机构的摩擦转矩 g= 度
密度 ρ= (7.k9gx/1m03)k
铁 g2/.m83x103k 铝 g8/.m53x103k 黄铜 g/m3 尼龙 1.1x103k
F FA mg(sin a cos a)[பைடு நூலகம் ]
实际测试计 算方法
D TL FB [Nm]
2
计算不同驱动机构的摩擦转矩
步进电机的选型及计算方法

步进电机的选型及计算方法步进电机是一种将电脑指令转化为机械运动的电机,广泛应用于打印机、绘图仪、数控机床、自动化设备等领域。
步进电机的选型和计算方法是确保电机能够满足使用要求的重要环节。
本文将介绍步进电机的选型和计算方法,以帮助读者了解如何正确选择步进电机。
**一、步进电机的选型**选型是步进电机设计的第一步,主要考虑以下几个因素:1.**载荷特性**:首先需要知道电机所需驱动的载荷特性,包括重量、转动惯量等。
根据载荷特性,选取适当的电机功率和扭矩。
2.**运动要求**:了解运动要求,包括速度、加速度、定位精度等。
根据运动要求,选取适当的步进角和步数。
3.**工作环境**:考虑工作环境的温度、湿度、粉尘、振动等因素,选取能够适应工作环境的电机。
4.**可靠性要求**:根据应用的可靠性要求,选取有良好可靠性的步进电机。
5.**成本**:考虑成本因素,选取能够满足需求且价格合理的电机。
选型过程中,通常需要参考制造商提供的电机规格书和技术手册,以获取详细的电机参数信息。
**二、步进电机的计算方法**1.**功率计算**:选择适当的功率可确保步进电机能够正常工作。
功率计算公式如下:功率(W)=扭矩(N·m)×转速(RPM)/9.54882.**扭矩计算**:根据应用的载荷特性计算步进电机所需的最大扭矩。
扭矩计算公式如下:扭矩(N·m)=载荷转动惯量(kg·m²)×角加速度(rad/s²)其中,角加速度可根据速度和加速度计算得到:角加速度(rad/s²)=加速度(rad/s²)/ 微步数(步)3.**速度计算**:根据应用的速度要求,计算步进电机的理论最大速度和可用的速度范围。
理论最大速度可按照电机额定的最大转速计算。
通常步进电机的最大转速范围在100-5000RPM之间。
可用速度范围受到供电电压、电机驱动方式、驱动电流等因素的影响。
伺服电机的选型和转动惯量的计算

伺服电机的选型和转动惯量的计算引言:伺服电机是一种能够实现精确定位和速度控制的电动机。
在自动化控制系统中,伺服电机广泛应用于机械装置的定位与运动控制,如机床、工业机械手臂、机器人等。
为了确保控制系统的性能和稳定性,正确选型和计算转动惯量是非常重要的。
一、伺服电机选型1.负载特性分析:首先需要对负载特性进行分析,包括负载的质量、摩擦系数、惯性矩等。
这些参数影响到伺服电机的选择,如电机的额定转矩等。
在分析负载特性时需要考虑静态特性和动态特性。
2.运行速度要求:根据系统的运行速度要求,选择电机的额定转速。
如果要求快速响应,需要选择具有较高转速的电机;如果要求大转矩输出,需要选择具有较大额定转矩的电机。
3.控制方式:根据系统的控制方式,选择合适的伺服电机。
常见的控制方式有位置控制、速度控制和力控制。
不同的控制方式对电机的性能要求也不同。
4.转矩和转速曲线:了解电机的转矩和转速曲线,可以帮助选择合适的伺服电机。
转矩曲线决定了电机能够产生的最大转矩,转速曲线决定了电机能够输出的最大转速。
5.电机功率:根据负载特性和运行速度要求,计算出所需的电机功率。
一般情况下,应选择稍大于所需功率的电机,以保证系统的可靠性和安全性。
6.品牌和价格:最后根据伺服电机的品牌和价格进行选择。
国际知名品牌的产品质量较高,但价格也较高。
可以根据实际需求和预算进行选择。
转动惯量是描述物体抗拒改变转动状态的特性。
在伺服电机的选型和控制系统设计中,转动惯量是一个重要的参数。
计算转动惯量的一般公式为:J=m*r^2其中,J是转动惯量,m是物体的质量,r是物体相对转轴的距离。
如果物体是一个均匀的圆盘或圆柱体,根据其几何形状可以通过以下公式计算转动惯量:J=1/2*m*r^2其中,m是物体的质量,r是物体的半径。
如果物体是由多个部分组成,可以通过将各部分的转动惯量相加得到整体的转动惯量。
在实际应用中,还需要考虑其他因素对转动惯量的影响,如内部零件的分布、负载的摩擦系数等。
步进电机选型及计算方法

步进电机选型表中有部分参数需要计算来获得。
可是实质计算中很多状况我们都没法获得切实的机械参数,所以,这里只给出比较简单的计算方法。
一、驱动模式的选择驱动模式是指怎样将传递装置的运动变换为步进电机的旋转。
下列图所示的驱动模式包含了电机的加 / 减速时间,驱动和定位时间,电机的选型鉴于模式图。
●必需脉冲数的计算必需脉冲数是指传动装置将物体从开端地点传递到目标地点所需要供应给步进电机的脉冲数。
必需脉冲数按下边公式计算:物体挪动的距离360 o必需脉冲数=×距离电机旋转一周挪动的距离步进角●驱动脉冲速度的计算驱动脉冲速度是指在设定的定位时间中电机旋转过必定角度所需要的脉冲数。
驱动脉冲数能够依据必需脉冲数、定位时间和加/ 减速时间计算得出。
(1)自启动运行方式自启动运行方式是指在驱动电机旋转和停止时不经过加快、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。
/ 停止时存在一个忽然自启动运行方式往常在转速较低的时候使用。
同时,由于在启动的速度变化,所以这类方式需要较大的加/ 减速力矩。
自启动运行方式的驱动脉冲速度计算方法以下:必需脉冲数 [ 脉冲 ]驱动脉冲速度[Hz]=定位时间 [ 秒](2)加 / 减速运行方式加// 减速运行方式是指电机第一以一个较低的速度启动,经过一个加快过程后达到正常的驱动脉冲速度,运行一段时间以后再经过一个减速过程后电机停止的运行方式。
其定位时间包含加快时间、减速时间和以驱动脉冲速度运行的时间。
加/ 减速时间需要依据传递距离、速度和定位时间来计算。
在加/ 减速运行方式中,由于速度变化较小,所以需要的力矩要比自启动方式下的力矩小。
加/ 减速运行方式下的驱动脉冲速度计算方法以下:必需脉冲数-启动脉冲数[Hz] ×加 / 减速时间 [ 秒 ] 驱动脉冲速度 [Hz]=定位时间 [ 秒 ] -加 / 减速时间 [ 秒 ]二、电机力矩的简单计算示例必需的电机力矩=(负载力矩+加 / 减速力矩)×安全系数●负载力矩的计算(TL)负载力矩是指传递装置上与负载接触部分所遇到的摩擦力矩。
伺服电机或步进电机功率计算流程

伺服电机或步进电机功率计算流程
一、选用电机的大小,主要参照惯量、同时需要核算转矩
1.1伺服电机:电机转子惯量与减速机入力轴惯量比,要求快速的启动、停止,惯量比要小,一般取1:5~1:10(值需要后期修正);对于启动、停止没有什么要求,正常启动的,惯量比可以取到1:20
1.2步进电机取惯量比,要求小于1:10(步进电机没有过载能力)
1.3如果有减速机或是减速比,惯量比换算关系:入力轴与出力轴的惯量关系(入力轴惯量=出力轴的惯量/减速比的平方)
二、伺服步进选型计算流程
1、计算运动部件的惯量
2、计算运动部件的加角速度
3、计算运动部件的正常负载
4、计算运动部件的加速负载
5、加速负载=惯性转矩(惯量*角加速度V/(R*t))+正常负载
三、关于伺服电机选用减速机减速比的问题
1、建议选用小于1:10的减速比(速比越大,价格越贵)
2、如果在选型过程中,根据惯量选型,电机功率在小功率范围之内的(小于1kw),可以不要加减速机
3、对于需要驱动比较大的载荷的工况,如果不加减速机的话,电机选型功率就会偏大,为了降低电机的选型功率,最好加减速比。
步进电机选型计算方法

步进电机选型的计算方法步进电机选型表中有部分参数需要计算来得到。
但是实际计算中许多情况我们都无法得到确切的机械参数,因此,这里只给出比较简单的计算方法。
◎驱动模式的选择驱动模式是指如何将传送装置的运动转换为步进电机的旋转。
下图所示的驱动模式包括了电机的加/减速时间,驱动和定位时间,电机的选型基于模式图。
●必要脉冲数的计算必要脉冲数是指传动装置将物体从起始位置传送到目标位置所需要提供给步进电机的脉冲数。
必要脉冲数按下面公式计算:必要脉冲数=物体移动的距离距离电机旋转一周移动的距离×360 o步进角●驱动脉冲速度的计算驱动脉冲速度是指在设定的定位时间中电机旋转过一定角度所需要的脉冲数。
驱动脉冲数可以根据必要脉冲数、定位时间和加/减速时间计算得出。
(1)自启动运行方式自启动运行方式是指在驱动电机旋转和停止时不经过加速、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。
自启动运行方式通常在转速较低的时候使用。
同时,因为在启动/停止时存在一个突然的速度变化,所以这种方式需要较大的加/减速力矩。
自启动运行方式的驱动脉冲速度计算方法如下:驱动脉冲速度[Hz]=必要脉冲数[脉冲]定位时间[秒](2)加/减速运行方式加//减速运行方式是指电机首先以一个较低的速度启动,经过一个加速过程后达到正常的驱动脉冲速度,运行一段时间之后再经过一个减速过程后电机停止的运行方式。
其定位时间包括加速时间、减速时间和以驱动脉冲速度运行的时间。
加/减速时间需要根据传送距离、速度和定位时间来计算。
在加/减速运行方式中,因为速度变化较小,所以需要的力矩要比自启动方式下的力矩小。
加/减速运行方式下的驱动脉冲速度计算方法如下:必要脉冲数-启动脉冲数[Hz]×加/减速时间[秒]驱动脉冲速度[Hz]=定位时间[秒]-加/减速时间[秒]◎电机力矩的简单计算示例必要的电机力矩=(负载力矩+加/减速力矩)×安全系数●负载力矩的计算(T L)负载力矩是指传送装置上与负载接触部分所受到的摩擦力矩。
步进伺服电机选型计算V1.1

说明:由于是连续运动,所以在计算牛矩时只需考虑负载牛矩,启动牛矩忽略,但必须考虑到机械结构参数:皮带速度:V=20m/min 皮带与工作物总质量m L =100kg *滑动面摩擦系数μ=0.3*滚筒直径D=0.1m *滚筒质量m2=200kg *传送带和滚筒的机械效率η=0.9*减速机机械效率ηG =0.7减速比i=20*外力FA=0N *移动方向与水平轴夹角a =0°1)电机转速减速机输出轴转速N=63.66183rpm 电机输出轴转速N M =N*i=1273.237rpm2)计算负载转矩减速机轴向负载F==减速机轴负载转矩T L =16.33333Nm电机轴负载转矩T LM == 1.166667Nm4)计算折算到电机轴的惯量皮带和工作物的惯量J M1=0.25kgm 皮带轮连续运动选型计算表F D22()2()2L L D D ππ2218m D Gi η滚筒的惯量J M2==0.25kgm 2J M1+2J M2=0.75kgm 25)必须转矩必须转矩T M =T LM *S = 2.333333Nm6)负荷与电机惯量比惯量比= 1.704545折算到减速机轴的负载惯量 J L =2218m D计算表格,启动牛矩忽略,但必须考虑到惯量的匹配其他常数G=9.8m/spi= 3.1416电机惯量J M=0.0011kgm2安全系数S=2。
伺服电机步进电机选型中转动惯量计算折算公式
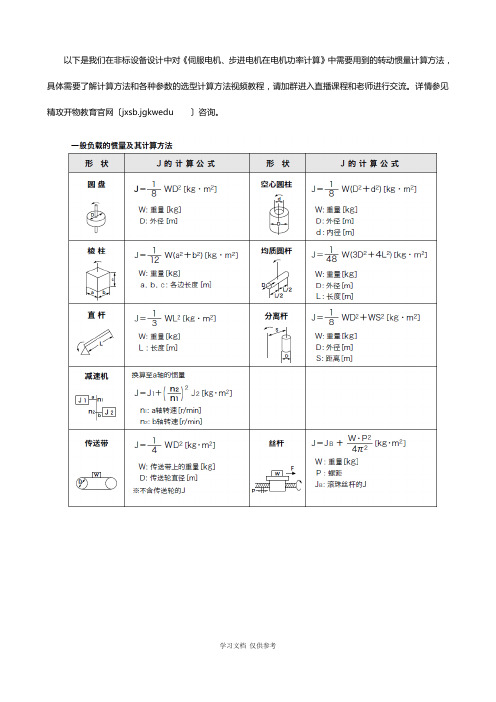
以下是我们在非标设备设计中对《伺服电机、步进电机在电机功率计算》中需要用到的转动惯量计算方法,具体需要了解计算方法和各种参数的选型计算方法视频教程,请加群进入直播课程和老师进行交流。
详情参见精攻开物教育官网〔jxsb.jgkwedu 〕咨询。
1. 圆柱体转动惯量(齿轮、联轴节、丝杠、轴的转动惯量)82MD J =对于钢材:341032-⨯⨯=gLrD Jπ)(1078.0264s cm kgf L D ⋅⋅⨯-M-圆柱体质量(kg); D-圆柱体直径(cm);L-圆柱体长度或厚度(cm); r-材料比重(gf /cm 3)。
2. 丝杠折算到马达轴上的转动惯量:DML2iJsJ =(kgf ·cm ·s 2) J s –丝杠转动惯量(kgf ·cm ·s 2);i-降速比,12z z i =3. 工作台折算到丝杠上的转动惯量g w22⎪⎭⎫ ⎝⎛⋅=n v J π gw2s 2⎪⎭⎫ ⎝⎛=π (kgf ·cm ·s 2)v -工作台移动速度(cm/min);n-丝杠转速(r/min); w-工作台重量(kgf);g-重力加速度,g = 980cm/s 2; s-丝杠螺距(cm)2. 丝杠传动时传动系统折算到驱轴上的总转动惯量:())s cm (kgf 2g w 122221⋅⋅⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛+++=πs J J i J J S tJ 1-齿轮z 1及其轴的转动惯量; J 2-齿轮z 2的转动惯量(kgf ·cm ·s 2); J s -丝杠转动惯量(kgf ·cm ·s 2); s-丝杠螺距,(cm); w-工件及工作台重量(kfg).5. 齿轮齿条传动时折算到小齿轮轴上的转动惯量2gw R J =(kgf ·cm ·s 2)R-齿轮分度圆半径(cm); w-工件及工作台重量(kgf)6. 齿轮齿条传动时传动系统折算到马达轴上的总转动惯量⎪⎪⎭⎫ ⎝⎛++=2221g w 1R J i J J tJ 1,J 2-分别为Ⅰ轴,Ⅱ轴上齿轮的转动惯量(kgf ·cm·s 2);R-齿轮z 分度圆半径(cm);w-工件及工作台重量(kgf)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
丝杠水平运动选型计算表格
机械结构参数:
速度:Vl=2m/min 滑动部分质量
M=100kg 丝杠长度
L B = 1.4m 丝杠直径
D
B =0.0125m 丝杠导程
P B =0.005m 连轴器质量
M C 0.2kg 连轴器直径
D C 0.04m 摩擦系数μ=0.1移动距离
L=1m 机械效率
η=0.9定位时间
t =0.8s 加减速时间比
A=25%外力
F A =0N 移动方向与水平轴夹角
a =0°1)速度曲线
加速时间
t 0=t *A =0.2s
2)电机转速
N M =V l /P B
=400
rpm 3)负荷转矩计算=98N
=0.086650822
Nm 4)克服惯量的加速转矩计算(也称做:启动转矩)
直线运动平台与负载惯量J L =6.33254E-05
kgm 2负载转矩T L =2B
FP πη
2()2B P m π
滚珠丝杠惯量J B
=2.65092E-05
kgm 2连轴器惯量J C
=0.00004kgm 2
总负荷惯量J L =J L +J B +J C
=
0.000129835kgm 2
启动转矩T S ==0.257576561Nm
5)必须转矩
必须转矩T M =(T L +T S )*S
=0.688454766Nm
6)电机选择
根据计算,初步确定电机型号,然后输入转子惯量,确认T M
7)负荷与电机惯量比
惯量比I 1=0.118031465
8)负荷与减速机惯量比
当负荷与电机惯量比>5时,考虑采用减速装置,提高惯量匹配
折算后的惯量比I 2=0.007376967
运动选型计算表格
*其他常数
*G=9.8m/s
*pi= 3.1416
*丝杠密度ρ=7900kg/m3
*
*
*
*
*
*
*
安全系数S=2
电机惯量J M=0.0011kgm2减速机减速比i=4。