步进电机——步进电机选型的计算方法
步进电机的选型与计算

步进电机的选型与计算步进电机是一种常见的电机类型,拥有精度高、可控性强、反应灵敏等优点,广泛应用于各种精密控制系统中。
在选择和计算步进电机时需要考虑以下几个方面。
一、步进电机的类型首先需要了解有哪些类型的步进电机。
目前市面上常见的步进电机有单相/两相/三相/五相等不同类型,不同的类型适用于不同的应用场景。
对于低速高力的应用场合,单相步进电机的效果较佳;需要高精度的位置控制时,可以选择三/五相步进电机。
在选择实际使用的步进电机时,最好能够根据实际需求进行精细化选择。
二、步进电机驱动器的选择选择步进电机驱动器时,需要根据步进电机的类型、电源电压和工作电流等参数进行选择。
一般来说,驱动器的峰值输出电流应大于步进电机的额定电流,以确保电机正常运行。
同时,还需要考虑驱动器的微步数,微步数越高,驱动器的精度控制就越好。
但是,高微步数对马达的耗电量会增加,如果长时间负载运行可能会导致驱动电机的温度升高,从而造成高温失控现象,因此在实际应用过程中需要注意平衡微步数和耗电量的关系。
三、步进电机的计算1. 计算步进电机的步数:计算步进电机的步数主要涉及到推导出步进电机的角度转换公式,与电机的角度转换速率有关。
步数越多,角度转换越精细,步数与转速的关系,可以用以下公式计算:n=Δθ/α,其中n为步数,Δθ为转角(是原始角度),α为每步转角。
2. 计算步进电机的速度:步进电机的速度计算与电机驱动器细分数、定位精度有关,主要通过计算每步角度转移量再计算出转速。
电机驱动器分辨率越高则每步角度转移量越小,转速就越慢,反之亦然。
计算步进电机的速度时,可以使用以下公式:v=r*n*f/60,其中v为速度,r为驱动器细分数的比率,n为步数,f为电机的转速。
总之,在进行步进电机的选型与计算时,需要根据实际应用需求选择合适的电机类型与驱动器,并结合实际情况合理计算步进电机的步数和速度。
这样才能确保电机在实际应用场景中能够正常运转,保证控制系统的精度和可靠性。
步进电机选型计算方法

步进电机选型计算方法步进电机是一种能将输入脉冲信号转化为角位移的电机。
它具有结构简单、控制精度高、启动扭矩大等优点,广泛应用于机械系统中的定位控制、速度调节、角度控制等领域。
在选型过程中,需要考虑步进电机的型号、参数和性能等因素。
本文将介绍步进电机选型的计算方法。
步进电机的型号和参数步进电机通常由两个参数决定,即步距角和相数。
步距角指的是电机每接受一个脉冲信号所转动的角度。
常见的步距角有 1.8度(200步/转)和0.9度(400步/转)两种。
步距角越小,电机的定位精度越高。
相数指的是电机的相数,常见的有2相、4相、6相等。
相数越多,电机的转矩平稳性越好。
步进电机的性能步进电机的性能包括静态转矩、动态转矩、最大转速等指标。
静态转矩是指电机在静止状态下能够提供的最大转矩,动态转矩是指电机在运转过程中能够提供的最大转矩。
最大转速是指电机能够达到的最高转速。
选型时需根据具体的应用需求来确定这些指标。
步进电机的负载特性负载特性包括电机扭矩-速度曲线和转动惯量。
电机扭矩-速度曲线描述了电机在不同速度下的输出扭矩和输入电流的关系,可以用来评估电机的运行稳定性。
转动惯量描述了电机转动时的惯性大小,通常是根据系统的加速度和位置控制要求来确定的。
步进电机的选型计算方法主要包括定位精度、动态响应性能以及转矩要求三个方面。
1.定位精度计算步进电机的定位精度受到步距角、齿距、电机的误差等因素的影响。
根据具体的应用需求,可以采用以下公式来计算定位精度:定位精度=N*U/360其中,N为步数(一转的步数),U为脉冲数2.动态响应性能计算动态响应性能主要包括加速度曲线和最大速度两个方面。
加速度曲线是根据系统的加速度和行程要求来确定的。
最大速度则取决于电机的最大转速和负载特性。
3.转矩要求计算转矩要求主要是根据负载的特性来确定的。
计算转矩要求时需要考虑负载的惯性、摩擦力、载荷等因素。
综合考虑以上因素,可以选择合适的步进电机。
通常情况下,需要进行多个步进电机比较和试验,以找到最适合应用需求的电机。
步进电机选型计算公式

步进电机选型计算公式
步进电机选型计算公式主要包括以下三个方面:
1. 计算步进电机的理论步数。
步进电机的理论步数是由电机的步距角以及驱动方式(单相、双相、四相等)决定的。
计算公式为:
理论步数= 360°/步距角×驱动方式
其中,步距角是指电机每一步转动的角度。
2. 计算步进电机的负载转矩。
负载转矩是指在实际工作过程中,电机需要承受的负载力矩。
该值会影响到电机的运行状态和驱动能力。
计算公式为:
负载转矩= 负载力×距离臂长
其中,负载力是指电机需要承受的负载力,距离臂长是指负载力所作用的杠杆臂长度。
3. 计算驱动电流大小。
驱动电流是指通过步进电机的电流大小,直接影响到步进电机的稳定工作和驱动效率。
计算公式为:
驱动电流= 负载转矩÷转矩系数
其中,转矩系数是一个常量,代表驱动电流和电机扭矩之间的关系。
这个值可以根据不同型号的驱动器进行调整。
步进电机选型计算

样本针单元电机选型分析一、选用电机的基本步骤四、电机选用计算公式1.运行模式选用加减速运行模式。
2.工作脉冲数A【脉冲】计算步进电机步距角/度 1.8同步轮直径r/mm13.37位移l/mm65时间t0/s0.8A=[65/(3.14*13.37)]*(360/1.8)=1.55*200=310脉冲细分脉冲数:A0细分3104细分12408细分248016细分4960附图:3.运行脉冲频率f2【Hz】计算T0=0.8s,得t1=0.8*0.25=0.2s4.加减速常数T R 【ms/kHz】计算(控制器使用,可以忽略)T R =0.2/(512-f1)5.运行脉冲频率f2【Hz 】的运行速度N M 【r/min 】计算6.负载转矩T L计算7.加速转矩Ta【N*m】计算(1)负载转动惯量J L转动惯量(Moment of Inertia)是刚体绕轴转动时惯性(回转物体保持其匀速圆周运动或静止的特性)的量度,用字母/或J表示。
其量值取决于物体的形状、质量分布及转轴的位置。
该机构做直线往复运动,滑轨与滑块之间存在缝隙,所以,在急停的瞬间会产生转动。
因此,该结构的惯量包括两部分:直线运动惯量和旋转转动惯量。
A.直线运动惯量计算将整个水平探针机构默认为一个整体,1.1Kg。
A m J13.37*3.14/1000=0.042 1.149.2*10-6B.转动惯量计算。
图中指出来的器件是偏心器件,其余按照同轴心计算。
a.电机距+同步轮离同步轮中心线距离是:80mm,电机长宽高42*42*38,M=0.46kg;J1=0.46((42*42+42*42)/3+80*80)/1000000=3484*10-6b.探针组件中心线距离是:62mm,M=0.46kg;J2=0.46((25*25+25*25)/3+62*62)/1000000=1959*10-6 c.滑轨+拖链+同步轮+轴+固定板中心线距离是:64mm,M=0.29kg,;J3=0.29*(55*55+280*280+12*64*64)/12/1000000=3156*10-6d.其他器件其他器件默认为偏心12mm,质量0.29Kg。
最全的步进电机选型计算过程
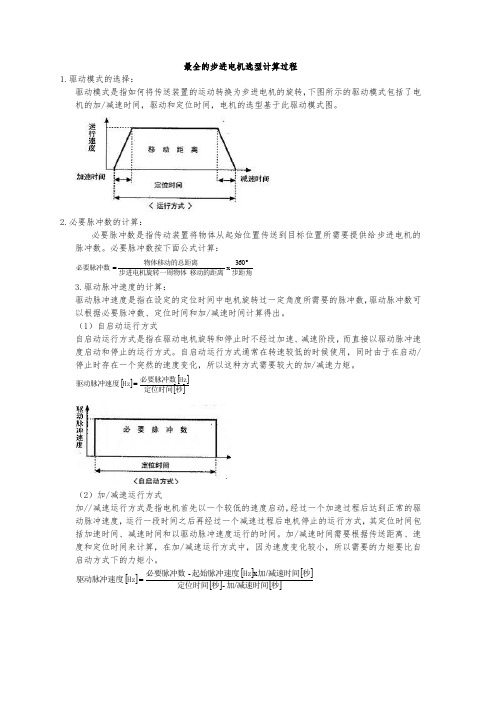
最全的步进电机选型计算过程1.驱动模式的选择:驱动模式是指如何将传送装置的运动转换为步进电机的旋转,下图所示的驱动模式包括了电机的加/减速时间,驱动和定位时间,电机的选型基于此驱动模式图。
2.必要脉冲数的计算:必要脉冲数是指传动装置将物体从起始位置传送到目标位置所需要提供给步进电机的脉冲数。
必要脉冲数按下面公式计算:步距角移动的距离步进电机旋转一周物体物体移动的总距离必要脉冲数︒=360x3.驱动脉冲速度的计算:驱动脉冲速度是指在设定的定位时间中电机旋转过一定角度所需要的脉冲数,驱动脉冲数可以根据必要脉冲数、定位时间和加/减速时间计算得出。
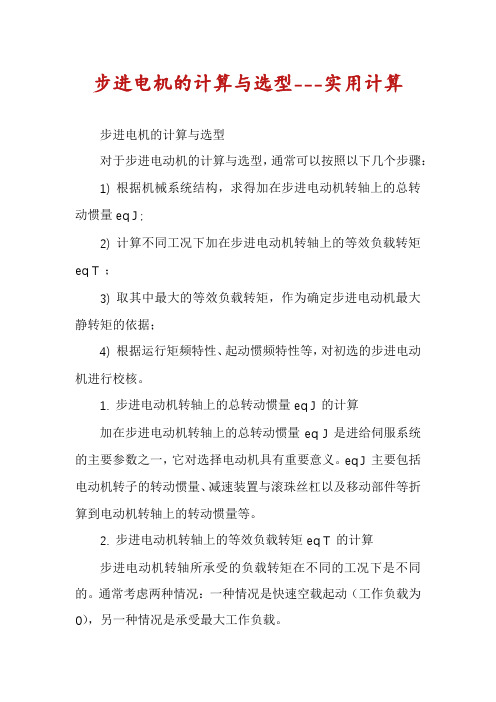
(1)自启动运行方式自启动运行方式是指在驱动电机旋转和停止时不经过加速、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。
自启动运行方式通常在转速较低的时候使用,同时由于在启动/停止时存在一个突然的速度变化,所以这种方式需要较大的加/减速力矩。
[][][]秒定位时间必要脉冲数驱动脉冲速度Hz Hz =(2)加/减速运行方式加//减速运行方式是指电机首先以一个较低的速度启动,经过一个加速过程后达到正常的驱动脉冲速度,运行一段时间之后再经过一个减速过程后电机停止的运行方式,其定位时间包括加速时间、减速时间和以驱动脉冲速度运行的时间。
加/减速时间需要根据传送距离、速度和定位时间来计算,在加/减速运行方式中,因为速度变化较小,所以需要的力矩要比自启动方式下的力矩小。
[][][][][]秒减速时间加秒定位时间秒减速时间加起始脉冲速度必要脉冲数驱动脉冲速度/-/x -Hz Hz =4.一般步进电机力矩简单计算:电机力矩=(摩擦负载力矩T L +启动时的惯性负载力矩T a )×安全系数。
步进电机的动态力矩一下子很难确定,我们往往先确定电机的静力矩。
静力矩选择的依据是电机工作的负载,而负载可分为启动时的惯性负载和恒速运行时的摩擦负载两种,自启动运行方式启动(一般指由低速启动)时的启动时的惯性负载力矩和恒速运行时的摩擦负载力矩均要考虑,加速起动时主要考虑启动时的惯性负载力矩,恒速运行进只要考虑摩擦负载力矩。
步进电机的计算方法

步进电机的计算方法1.根据驱动方式选择步进电机型号:步进电机主要分为两种驱动方式,即双相驱动和四相驱动。
双相驱动的步进电机具有较高的输出转矩,适用于需要较大负载的应用,而四相驱动的步进电机输出转矩较低,适用于速度要求较高的应用。
2.计算步进电机运转速度:步进电机的运转速度主要受到步进角度和脉冲频率的影响。
步进角度一般是固定的,常见的有1.8度和0.9度。
计算步进电机运转速度的公式为:速度=步进角度×脉冲频率。
3.计算步进电机的步进角度:步进电机的步进角度是指每接收到一个脉冲信号,电机旋转的角度。
常见的步进角度有1.8度和0.9度。
计算步进电机的步进角度的公式为:步进角度=360度÷步进电机的相数。
4.计算步进电机的电压和电流:步进电机在运行时需要供应一定的电压和电流来驱动。
计算步进电机的电压和电流的方法是根据电机的工作电压和绕组电阻。
电机的绕组电阻一般可以从电机的技术参数中获取。
计算步进电机的电压的公式为:电压=电流×电阻。
5.计算步进电机的输出功率:步进电机的输出功率是指电机在工作时提供的机械功率。
计算步进电机的输出功率的方法是根据电机的输出转矩和转速。
输出功率的公式为:输出功率=转矩×转速。
6.计算步进电机的加速度和减速度:步进电机的加速度和减速度是指电机从静止状态到达最大速度和从最大速度减速到停止状态所需要的时间。
计算步进电机的加速度和减速度的公式为:加速度(或减速度)=(最大速度-初始速度)÷时间。
7.计算步进电机的负载惯性:步进电机在运行时会受到负载惯性的影响,计算步进电机的负载惯性的方法为负载惯性=负载质量×负载半径的平方。
以上是步进电机的计算方法的一些基本介绍,根据实际需求,其他还有一些特殊的计算方法,比如控制系统的设计和驱动方式的选择等,需要根据具体情况进行进一步的研究和计算。
步进电机的计算与选型---实用计算
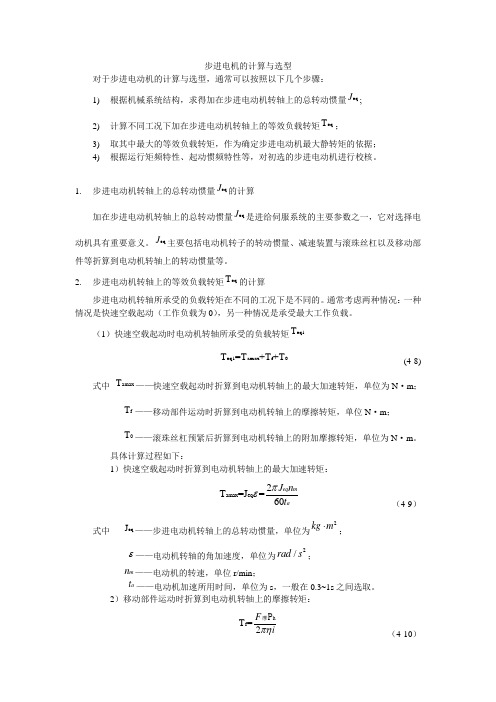
步进电机的计算与选型---实用计算步进电机的计算与选型对于步进电动机的计算与选型,通常可以按照以下几个步骤:1) 根据机械系统结构,求得加在步进电动机转轴上的总转动惯量eq J ;2) 计算不同工况下加在步进电动机转轴上的等效负载转矩eq T ;3) 取其中最大的等效负载转矩,作为确定步进电动机最大静转矩的依据;4) 根据运行矩频特性、起动惯频特性等,对初选的步进电动机进行校核。
1. 步进电动机转轴上的总转动惯量eq J 的计算加在步进电动机转轴上的总转动惯量eq J 是进给伺服系统的主要参数之一,它对选择电动机具有重要意义。
eq J 主要包括电动机转子的转动惯量、减速装置与滚珠丝杠以及移动部件等折算到电动机转轴上的转动惯量等。
2. 步进电动机转轴上的等效负载转矩eq T 的计算步进电动机转轴所承受的负载转矩在不同的工况下是不同的。
通常考虑两种情况:一种情况是快速空载起动(工作负载为0),另一种情况是承受最大工作负载。
(1)快速空载起动时电动机转轴所承受的负载转矩eq1T eq1amax f 0T =T +T +T (4-8)式中amax T ――快速空载起动时折算到电动机转轴上的最大加速转矩,单位为N m ;f T ――移动部件运动时折算到电动机转轴上的摩擦转矩,单位N m ;0T ――滚珠丝杠预紧后折算到电动机转轴上的附加摩擦转矩,单位为N m 。
具体计算过程如下:1)快速空载起动时折算到电动机转轴上的最大加速转矩:amax eq 2T =J =60eq ma J n t πε (4-9)式中eq J ――步进电动机转轴上的总转动惯量,单位为2kg m ?;ε――电动机转轴的角加速度,单位为2/rad s ;m n ――电动机的转速,单位r/min ;a t ――电动机加速所用时间,单位为s ,一般在0.3~1s 之间选取。
2)移动部件运动时折算到电动机转轴上的摩擦转矩:f T =2F i πη摩hP (4-10)式中F 摩――导轨的摩擦力,单位为N ;h P ――滚珠丝杠导程,单位为m ;η――传动链总效率,一般取0.70.85η= ;i ――总的传动比,/s m i n n =,其中m n 为电动机转速,s n 为丝杠的转速。
步进电机的选型和计算方法

1、步进电机的选用计算方法步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点,广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。
在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。
一般地说最大静力矩Mjmax大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。
在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。
但细分只能改变其分辨率,不改变其精度。
精度是由电机的固有特性所决定。
选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。
选择步进电机需要进行以下计算:(1)计算齿轮的减速比根据所要求脉冲当量,齿轮减速比i计算如下:i=(φ.S)/(360.Δ) (1-1) 式中φ -步进电机的步距角(o/脉冲) S -丝杆螺距(mm) Δ-(mm/脉冲)(2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。
Jt=J1+(1/i2)[(J2+Js)+W/g(S/2π)2] (1-2)式中Jt-折算至电机轴上的惯量(Kg.cm.s2)J1、J2 -齿轮惯量(Kg.cm.s2) Js -丝杆惯量(Kg.cm.s2) W-工作台重量(N)S-丝杆螺距(cm)(3)计算电机输出的总力矩MM=Ma+Mf+Mt (1-3)Ma=(Jm+Jt).n/T×1.02×10ˉ2 (1-4)式中Ma -电机启动加速力矩(N.m) Jm、Jt-电机自身惯量与负载惯量(Kg.cm.s2) n-电机所需达到的转速(r/min)T---电机升速时间(s)Mf=(u.W.s)/(2πηi)×10ˉ2 (1-5)Mf-导轨摩擦折算至电机的转矩(N.m) u-摩擦系数η-传递效率Mt=(Pt.s)/(2πηi)×10ˉ2 (1-6)Mt-切削力折算至电机力矩(N.m) Pt-最大切削力(N)(4)负载起动频率估算。
步进电机的选型及计算方法

步进电机的选型及计算方法步进电机是一种将电脑指令转化为机械运动的电机,广泛应用于打印机、绘图仪、数控机床、自动化设备等领域。
步进电机的选型和计算方法是确保电机能够满足使用要求的重要环节。
本文将介绍步进电机的选型和计算方法,以帮助读者了解如何正确选择步进电机。
**一、步进电机的选型**选型是步进电机设计的第一步,主要考虑以下几个因素:1.**载荷特性**:首先需要知道电机所需驱动的载荷特性,包括重量、转动惯量等。
根据载荷特性,选取适当的电机功率和扭矩。
2.**运动要求**:了解运动要求,包括速度、加速度、定位精度等。
根据运动要求,选取适当的步进角和步数。
3.**工作环境**:考虑工作环境的温度、湿度、粉尘、振动等因素,选取能够适应工作环境的电机。
4.**可靠性要求**:根据应用的可靠性要求,选取有良好可靠性的步进电机。
5.**成本**:考虑成本因素,选取能够满足需求且价格合理的电机。
选型过程中,通常需要参考制造商提供的电机规格书和技术手册,以获取详细的电机参数信息。
**二、步进电机的计算方法**1.**功率计算**:选择适当的功率可确保步进电机能够正常工作。
功率计算公式如下:功率(W)=扭矩(N·m)×转速(RPM)/9.54882.**扭矩计算**:根据应用的载荷特性计算步进电机所需的最大扭矩。
扭矩计算公式如下:扭矩(N·m)=载荷转动惯量(kg·m²)×角加速度(rad/s²)其中,角加速度可根据速度和加速度计算得到:角加速度(rad/s²)=加速度(rad/s²)/ 微步数(步)3.**速度计算**:根据应用的速度要求,计算步进电机的理论最大速度和可用的速度范围。
理论最大速度可按照电机额定的最大转速计算。
通常步进电机的最大转速范围在100-5000RPM之间。
可用速度范围受到供电电压、电机驱动方式、驱动电流等因素的影响。
步进电机选型的三种方法

电机选型—丝杆步进电机选型、电机插件使用方法目的:熟悉丝杆电机使用模型,掌握3种计算方式,并对其中原理进行分析,掌握电机基本参数和公式并且利用电机选型软件验证课程内容:已知:总负载m=20kg,速度V=0.1m/s,1610导程P=10mm,导轨摩擦系数为μ=0.11、扭矩匹配的三种方法方法一:J(惯量)=M(P/2π)^2=20kg*0.00000254=0.0000507kgm^2=0.507丝杆惯量J=1/8MD²=0.256总惯量=旋转惯量+直动惯量=0.507+0.256=0.8加速时间0.2sω=2πN/60=6.28*600/60=62.8rad/s角加速度β=ω/t=62.8rad/s/0.2s=314rad/s^2T加速=j*β=0.00008kgm^2*314rad/s^2=0.025NMf=μmg=0.1*20kg*10N/kg=20NT(匀速)=F*Pb/2π=20N*0.01M/2/3.14=0.032NMT(总)=T(匀速)+T(加速)=0.032NM+0.025NM=0.06NM 方法二:方法三:f=μmg=0.1*20kg*10N/kg=20NT(匀速)=F*Pb/2π=20N*0.01M/2/3.14=0.032NM T加速=5*T=0.16NM2、转速匹配转速N=V*60*1000/Pb=0.1m/s*60*1000/10mm=600r/min200-600rpm3、电机惯量匹配电机惯量J=0.00008kgm^2/20=0.000004kgm^2=0.04*10^-4课后作业:已知:总负载m=100kg,速度V=0.2m/s,导程Pb=?,计算所需步进电机参数。
步进电机的选型步骤
步进电机的计算与选型对于步进电动机的计算与选型,通常可以按照以下几个步骤:1) 根据机械系统结构,求得加在步进电动机转轴上的总转动惯量eq J ;2) 计算不同工况下加在步进电动机转轴上的等效负载转矩eq T ;3) 取其中最大的等效负载转矩,作为确定步进电动机最大静转矩的依据;4) 根据运行矩频特性、起动惯频特性等,对初选的步进电动机进行校核。
1. 步进电动机转轴上的总转动惯量eq J 的计算加在步进电动机转轴上的总转动惯量eq J 是进给伺服系统的主要参数之一,它对选择电动机具有重要意义。
eq J 主要包括电动机转子的转动惯量、减速装置与滚珠丝杠以及移动部件等折算到电动机转轴上的转动惯量等。
ml2/122. 步进电动机转轴上的等效负载转矩eq T 的计算步进电动机转轴所承受的负载转矩在不同的工况下是不同的。
通常考虑两种情况:一种情况是快速空载起动(工作负载为0),另一种情况是承受最大工作负载。
(1)快速空载起动时电动机转轴所承受的负载转矩eq1Teq1amax f 0T =T +T +T (4-8)式中 amax T ——快速空载起动时折算到电动机转轴上的最大加速转矩,单位为N ·m ;f T ——移动部件运动时折算到电动机转轴上的摩擦转矩,单位N ·m ;0T ——滚珠丝杠预紧后折算到电动机转轴上的附加摩擦转矩,单位为N ·m 。
具体计算过程如下:1)快速空载起动时折算到电动机转轴上的最大加速转矩:amax eq 2T =J =60eq ma J n t πε (4-9)式中 eq J ——步进电动机转轴上的总转动惯量,单位为2kg m ⋅;ε——电动机转轴的角加速度,单位为2/rad s ;m n ——电动机的转速,单位r/min ;a t ——电动机加速所用时间,单位为s ,一般在0.3~1s 之间选取。
2)移动部件运动时折算到电动机转轴上的摩擦转矩:f T =2i πη (4-10)式中 F 摩——导轨的摩擦力,单位为N ;h P ——滚珠丝杠导程,单位为m ;η——传动链总效率,一般取0.70.85η=;i ——总的传动比,/s m i n n =,其中m n 为电动机转速,s n 为丝杠的转速。
步进电机的计算与选型

步进电机的计算与选型
步进电机的计算和选型主要涉及以下几个方面:
1. 负载转矩计算:首先需要计算所需驱动的负载转矩。
根据应用需求和机械系统的要求,确定所需的最大持续转矩和加速度转矩。
2. 步进角度:步进电机的旋转角度由步进角决定,常见的步进角有1.8°和0.9°。
选择合适的步进角取决于应用的精度要求和控制系统的分辨率。
3. 步进电机类型:根据具体应用需求,选择合适的步进电机类型,如单向旋转、双向旋转、混合磁体等。
4. 推动方式:根据控制系统的要求和应用场景,选择合适的推动方式,如全步进模式(Full-Step)、半步进模式(Half-Step)或微步进模式(Microstep)等。
5. 驱动器选择:根据步进电机的额定电流、驱动电压和控制方式选择合适的驱动器。
驱动器应具备适当的功率、保护功能和接口兼容性。
6. 总负载惯量计算:考虑到驱动系统的动态响应和稳定性,需要计算总负载的惯性矩,确定所需的步进电机的惯性矩和加速度能力。
7. 工作环境:根据具体工作环境的要求,考虑步进电机的外形尺寸、防护等级、工作温度范围等因素。
8. 可靠性和寿命:了解步进电机的可靠性指标和寿命预期,以确保合适的使用寿命和可靠性。
在进行步进电机的选型时,需要结合上述因素进行综合考虑,并根据实际需求和应用环境选择合适的步进电机。
此外,还应注意与步进电机相关的控制系统、反馈系统和机械传动系统的匹配性,以实现良好的性能和稳定运行。
最好咨询专业的电机供应商或工程师以获取更准确的建议和选择。
步进电机的选型与计算
步进电机的选型与计算步进电机是一种常见的电动机类型,广泛应用于各种自动控制系统中。
步进电机以其结构简单、运动精确和控制方便的特点,被广泛应用于打印机、数控机床、机器人等领域。
在选择步进电机和进行计算时,需要考虑以下几个方面:步进角度、扭矩、电流、电压、转速和加速度。
本文将对步进电机的选型和计算进行详细介绍。
1.步进角度选择步进电机通常有两种步进角度可选:1.8度和0.9度。
其中1.8度步进角度的电机更为常见,但如果需要更高的运动精度,可以选择0.9度步进角度的电机。
步进角度越小,电机一圈的步数越多,运动精度也就越高。
2.扭矩选择扭矩是步进电机的输出能力,通常由电机的尺寸和电流决定。
选择合适的扭矩需要考虑应用场景下的负载情况。
如果负载较大或需要较大的运动力矩,需要选择具有较大扭矩的电机。
3.电流选择4.电压选择选择步进电机的电压需要考虑到驱动器的额定电压。
步进电机的电压应该与驱动器能够提供的电压匹配,以确保电机正常工作。
通常,选择合适的电压可以提高电机的响应速度和运动精度。
5.转速和加速度选择在进行步进电机的计算时,可以根据具体的参数和公式进行计算。
以下是步进电机常用的几个计算公式:1.步进电机的转速计算公式:转速 = 频率× 步进角度× 60(单位:rpm)2.步进电机的转矩计算公式:转矩=功率/转速(单位:Nm)3.步进电机的加速度计算公式:加速度 = (最终速度 - 初始速度)/ 时间(单位:rad/s²)这些公式可以根据具体的参数进行灵活计算,以满足不同应用场景的需求。
总结起来,步进电机的选型和计算需要考虑步进角度、扭矩、电流、电压、转速和加速度等因素。
根据具体的应用场景需求,选择合适的步进电机,并进行相关参数的计算,以满足项目的设计要求。
步进电机选型方法
步进电机选型方法步进电机简介及选型方法如何选择合适的步进电机1. 负载分类:(1)Tf力矩负载:Tf = GrG 重物重量r 半径(2)TJ惯性负载:J = M(R12+R22)/ 32 (Kgcm)M:质量R1:外径R2:内径TJ = Jdw/dt dw/dt 为角加速度2.力矩曲线图的说明力矩曲线图是步进电机输出特性的重要表现,以下是我们对其中关键词语的解释。
步进电机简介及选型方法说明:1. 工作频率点:表示步进电机在该点的转速值。
单位:Hzn=Θ*Hz / (360*D)n 转/秒Hz 该点的频率值D 电路的细分值,Θ步进电机的步距角例:1.8步进电机,在1/2细分驱动的情况下(即每步0.9)500Hz 时,其速度是1.25转/秒2. 起动区域:步进电机可以直接起动或停止的区域。
3. 运行区域:在这个区域里,电机不能直接运行,必须先要在起动区域内起动,然后通过加速的方式,才能到达该工作区域内。
同样,在该区域内,电机也不能直接制动,否则就会造成失步,必须通过减速的方式到起动区域内,在进行制动。
4. 最大起动频率点:步进电机在空载情况下,最大的直接起动速度点。
5. 最大运行频率点:步进电机在空载情况下,可以达到的最大的运行速度点。
6. 起动力矩:步进电机在特定的工作频率点下,直接起动可带动的最大力矩负载值。
7. 运行力矩:步进电机在特定的工作频率点下,运行中可带动的最大力矩负载值。
由于运动惯性的原因,所以,运行力矩要比起动力矩大。
3 加速和减速运动的控制当一个系统的工作频率点在力矩曲线图的运行区域内时,如何在最短的时间内加速,减速就成了关键。
如下图示,步进电机的动态力矩特性一般在低速时为水平直线状,在高速时,由于电感的影响,很快下滑。
步进电机简介及选型方法(1)直线加速运动已知电机负载为TL,要从F0 在最短时间tr内加速到F1,求tr 和加速脉频率F(t)A.确定TJ,一般TJ =70% Tm。
步进电机的计算与选型---实用计算
步进电机的计算与选型对于步进电动机的计算与选型,通常可以按照以下几个步骤:1) 根据机械系统结构,求得加在步进电动机转轴上的总转动惯量eq J ;2) 计算不同工况下加在步进电动机转轴上的等效负载转矩eq T ;3) 取其中最大的等效负载转矩,作为确定步进电动机最大静转矩的依据;4) 根据运行矩频特性、起动惯频特性等,对初选的步进电动机进行校核。
1. 步进电动机转轴上的总转动惯量eq J 的计算加在步进电动机转轴上的总转动惯量eq J 是进给伺服系统的主要参数之一,它对选择电动机具有重要意义。
eq J 主要包括电动机转子的转动惯量、减速装置与滚珠丝杠以及移动部件等折算到电动机转轴上的转动惯量等。
2. 步进电动机转轴上的等效负载转矩eq T 的计算步进电动机转轴所承受的负载转矩在不同的工况下是不同的。
通常考虑两种情况:一种情况是快速空载起动(工作负载为0),另一种情况是承受最大工作负载。
(1)快速空载起动时电动机转轴所承受的负载转矩eq1Teq1amax f 0T =T +T +T (4-8)式中 amax T ——快速空载起动时折算到电动机转轴上的最大加速转矩,单位为N ·m ;f T ——移动部件运动时折算到电动机转轴上的摩擦转矩,单位N ·m ;0T ——滚珠丝杠预紧后折算到电动机转轴上的附加摩擦转矩,单位为N ·m 。
具体计算过程如下:1)快速空载起动时折算到电动机转轴上的最大加速转矩:amax eq 2T =J =60eq ma J n t πε (4-9)式中 eq J ——步进电动机转轴上的总转动惯量,单位为2kg m ⋅;ε——电动机转轴的角加速度,单位为2/rad s ;m n ——电动机的转速,单位r/min ;a t ——电动机加速所用时间,单位为s ,一般在0.3~1s 之间选取。
2)移动部件运动时折算到电动机转轴上的摩擦转矩:f T =2F i πη摩hP (4-10)式中 F 摩——导轨的摩擦力,单位为N ;h P ——滚珠丝杠导程,单位为m ;η——传动链总效率,一般取0.70.85η=;i ——总的传动比,/s m i n n =,其中m n 为电动机转速,s n 为丝杠的转速。
电机选型的计算示例 步进电机如何选型 步进电机选型

步进电机——步进电机选型的计算示例◎必要脉冲数和驱动脉冲数速度计算的示例下面给出的是一个3相步进电机必要脉冲数和驱动脉冲速度的计算示例。
这是一个实际应用例子,可以更好的理解电机选型的计算方法。
●驱动滚轴丝杆如下图,3相步进电机(1.2°/步)驱动物体运动1秒钟,则必要脉冲数和驱动脉冲速度的计算方法如下:必要脉冲数=10010×360°1.2°=3000[脉冲]如果采用自启动方式驱动1秒钟,则驱动脉冲速度应该这样计算:3000[Pulse]/1[sec]=3[kHz]但是,自启动速度不可能是5kHz,应该采用加/减速运行方式来驱动。
如果加/减速时间设置为定位时间的25%,启动脉冲速度为500[Hz],则计算方法如下:驱动脉冲速度[Hz]=3000[脉冲]-500[Hz]×0.25[秒]1[秒]-0.25[秒]=3.8 [kHz]如图所示:●驱动传动带如下图,3相步进电机(1.2°/步)驱动物体运动1秒钟。
驱动轮的周长即旋转一圈移动的距离大约为50[mm]。
因此,所需要的必要脉冲数为:必要脉冲数=110050×360°1.2°=6600 [脉冲]所需参数同上例驱动滚轴丝杆,采用加/减速运行模式,则驱动脉冲速度为:驱动脉冲速度[Hz]=6600[脉冲]-500[Hz]×0.25[秒]1[秒]-0.25[秒]=8.7 [kHz]如图所示:◎负载力矩的计算示例(T L)下面给出的是一个3相步进电机负载力矩的计算示例。
这是一个实际应用例子,其中的数字公式有助于更好的理解电机选型的应用。
●滚轴丝杆驱动水平负载如下图,滚轴丝杆驱动水平负载,效率为90%,负载重量为40千克,则负载力矩的计算方法如下:T L=m·P B2πη×1i[kgf·cm]T L=40[kg]×1[cm]2π×0.9×11=7.07 [kgf·cm]●传送带驱动水平负载传送带驱动水平负载,效率为90%,驱动轮直径16毫米,负载重量是9千克,则负载力矩的计算方法如下:T L =D2×m×1η×1i[kgf<, SPAN style="FONT-SIZE: 9pt;mso-hansi-font-family: 'Times New Roman';FONT-FAM: 宋体; mso-bidi: 12.0pt;mso-ascii-: 'Times New Roman'">·cm] T L=1.6 [cm]2×9 [kg] ×10.9×11=8 [kgf·cm]●滚轴丝杆和减速器驱动水平负载如下图,滚轴丝杆螺距为5毫米,效率为90%,负载重量为250千克,则负载力矩的计算方法如下:T L=m·P B2πη×1i[kgf·cm]T L=250[kg]×0.5[cm]2π×0.9×110=2.21 [kgf·cm]这是水平方向负载的计算结果,如果是垂直方向的负载,则力矩应该是此结果的2倍,而且此结果仅包括负载力矩,电机的总负载还应该包括加/减速力矩,但是,计算中很难得到准确的负载惯性惯量,因此,为了解决这个问题,在实际计算负载力矩的时候,特别是自启动或需要迅速加/减速的情况,我们应该在此基础上再乘以一个安全系数。
步进电机的计算与选型---实用计算

步进电机的计算与选型对于步进电动机的计算与选型,通常可以按照以下几个步骤:1) 根据机械系统结构,求得加在步进电动机转轴上的总转动惯量eq J ;2) 计算不同工况下加在步进电动机转轴上的等效负载转矩eq T ;3) 取其中最大的等效负载转矩,作为确定步进电动机最大静转矩的依据;4) 根据运行矩频特性、起动惯频特性等,对初选的步进电动机进行校核。
1. 步进电动机转轴上的总转动惯量eq J 的计算加在步进电动机转轴上的总转动惯量eq J 是进给伺服系统的主要参数之一,它对选择电动机具有重要意义。
eq J 主要包括电动机转子的转动惯量、减速装置与滚珠丝杠以及移动部件等折算到电动机转轴上的转动惯量等。
2. 步进电动机转轴上的等效负载转矩eq T 的计算步进电动机转轴所承受的负载转矩在不同的工况下是不同的。
通常考虑两种情况:一种情况是快速空载起动(工作负载为0),另一种情况是承受最大工作负载。
(1)快速空载起动时电动机转轴所承受的负载转矩eq1Teq1amax f 0T =T +T +T (4-8)式中 amax T ——快速空载起动时折算到电动机转轴上的最大加速转矩,单位为N ·m ;f T ——移动部件运动时折算到电动机转轴上的摩擦转矩,单位N ·m ;0T ——滚珠丝杠预紧后折算到电动机转轴上的附加摩擦转矩,单位为N ·m 。
具体计算过程如下:1)快速空载起动时折算到电动机转轴上的最大加速转矩:amax eq 2T =J =60eq ma J n t πε (4-9)式中 eq J ——步进电动机转轴上的总转动惯量,单位为2kg m ⋅;ε——电动机转轴的角加速度,单位为2/rad s ;m n ——电动机的转速,单位r/min ;a t ——电动机加速所用时间,单位为s ,一般在0.3~1s 之间选取。
2)移动部件运动时折算到电动机转轴上的摩擦转矩:f T =2F i πη摩h P (4-10)式中 F 摩——导轨的摩擦力,单位为N ;h P ——滚珠丝杠导程,单位为m ;η——传动链总效率,一般取0.70.85η=;i ——总的传动比,/s m i n n =,其中m n 为电动机转速,s n 为丝杠的转速。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
步进电机——步进电机选型的计算方法步进电机选型表中有部分参数需要计算来得到。
但是实际计算中许多情况我们都无法得到确切的机械参数,因此,这里只给出比较简单的计算方法。
◎驱动模式的选择驱动模式是指如何将传送装置的运动转换为步进电机的旋转。
下图所示的驱动模式包括了电机的加/减速时间,驱动和定位时间,电机的选型基于模式图。
●必要脉冲数的计算必要脉冲数是指传动装置将物体从起始位置传送到目标位置所需要提供给步进电机的脉冲数。
必要脉冲数按下面公式计算:必要脉冲数=物体移动的距离距离电机旋转一周移动的距离×360 o 步进角●驱动脉冲速度的计算驱动脉冲速度是指在设定的定位时间中电机旋转过一定角度所需要的脉冲数。
驱动脉冲数可以根据必要脉冲数、定位时间和加/减速时间计算得出。
(1)自启动运行方式自启动运行方式是指在驱动电机旋转和停止时不经过加速、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。
自启动运行方式通常在转速较低的时候使用。
同时,因为在启动/停止时存在一个突然的速度变化,所以这种方式需要较大的加/减速力矩。
自启动运行方式的驱动脉冲速度计算方法如下:驱动脉冲速度[Hz]=必要脉冲数[脉冲]定位时间[秒](2)加/减速运行方式加//减速运行方式是指电机首先以一个较低的速度启动,经过一个加速过程后达到正常的驱动脉冲速度,运行一段时间之后再经过一个减速过程后电机停止的运行方式。
其定位时间包括加速时间、减速时间和以驱动脉冲速度运行的时间。
加/减速时间需要根据传送距离、速度和定位时间来计算。
在加/减速运行方式中,因为速度变化较小,所以需要的力矩要比自启动方式下的力矩小。
加/减速运行方式下的驱动脉冲速度计算方法如下:必要脉冲数-启动脉冲数[Hz]×加/减速时间[秒]驱动脉冲速度[Hz]=定位时间[秒]-加/减速时间[秒]◎电机力矩的简单计算示例必要的电机力矩=(负载力矩+加/减速力矩)×安全系数●负载力矩的计算(TL)负载力矩是指传送装置上与负载接触部分所受到的摩擦力矩。
步进电机驱动过程中始终需要此力矩。
负载力矩根据传动装置和物体的重量的不同而不同。
许多情况下我们无法得到精确的系统参数,所以下面只给出了简单的计算方法。
负载力矩可以根据下面的图表和公式来计算。
(1)滚轴丝杆驱动※ 负载力矩的计算公式:TL =[F ·PB 2πη+μ0F0PB 2π]× 1 i[kgf ·cm] ※ 负载力矩的估算公式:TL =m ·PB 2πη × 1 i[kgf ·cm] (水平方向)TL =m ·PB 2πη × 1 i× 2 [kgf ·cm] (垂直方向) (2)传送带/齿条齿轮传动※ 负载力矩的计算公式:TL =F 2πη× πD i =FD 2ηi[kgf ·cm] F = FA + m ( sin α + μcos α) [Kg]※ 负载力矩的估算公式:TL = D 2× m × 1 η × 1 i[kgf ·cm] (水平方向)TL = D 2× m × 1 η × 1 i × 2 [kgf ·cm] (垂直方向)(3)皮带轮传动※ 负载力矩的计算公式:TL =μFA+m 2π× πD i =(μFA+m) D 2i[kgf ·cm]※ 负载力矩的估算公式:TL = D 2× mg × 1 i[kgf ·cm](4)实测方法我们也可以通过这种方法得到负载力矩:用弹簧秤拉动滑轮慢慢转动,此时弹簧秤会有一个读数,这个数值就是所用力的大小(FB),然后乘以滑轮的半径就可以得到负载力矩(如下式)。
通常这种方法得到数值要比计算得到得结果要精确。
TL=FBD2[kgf·cm][参数说明]●加/减速力矩的计算(Ta)加/减速力矩是用来加速或减速与电机相连的传动装置。
根据加/减速时间和传动装置负载惯性惯量的不同,这个力矩会有很大的变化。
因此,自启动运行方式和加/减速运行方式的力矩会有一个较大的不同。
加/减速力矩可以按下式计算:※自启动运行方式(需要较大的加/减速力矩)加/减速力矩[kgf·cm]=转子惯性惯量[kgm2]+负载惯性惯量[kgm2]重力加速度[cm/sec2]×π×步进角[o]×驱动脉冲速度2[Hz]180×3.6/步进角[o]※加/减速运行方式加/减速力矩[kgf·cm]=转子惯性惯量[kgm2]+负载惯性惯量[kgm2]重力加速度[cm/sec2]×π×步进角[o]180 o×运行脉冲速度[Hz]-启动脉冲速度[Hz]加/减速时间[sec]高速粘片机晶工作台的电机选型计算与运动控制徐品烈(中国电子科技集团第四十五研究所,北京东燕郊101601)1 引言目前,国内半导体生产线上的粘片机多使用从美国,德国,日本进口的设备。
为降低成本,加快国内半导体设备的发展,提高生产效率,我所开发研制的高速粘片机,其粘片速度达到5只/s,UPH可达18 000片/h,它的关键指标和性能已达到国际先进水平。
高速粘片机主要用于LED芯片的粘接,能满足国内大多数LED生产线的需求,适用范围广,通用性强,除适合各种高品质、高亮度LED(红色、绿色、黄色、蓝色、白色等)生产外,还可用于部分半导体分离器件、二极管、三极管、PCB及小型DIP、SOP等产品的生产。
2 晶片工作台机构高速粘片机主要工作过程包括:由上料机构将PCB框架放置于传输轨道中,由传输机构将PCB框架传输到点胶工位,点胶机构在所有PCB的焊盘上点胶后,由传输机构把PCB框架传输到粘片工位;晶片粘接在蓝膜上,而粘接晶片的蓝膜由绷环固定在晶片工作台上,CCD检测出芯片位置,通过晶片工作台的移动,使芯片自动对准于拾取位置,再由芯片拾取机构将芯片拾取后放置于点胶后的PCB焊盘上进行粘接。
晶片工作台再根据CCD检测出的数据,使下一个相邻的芯片自动对准于拾取位置,等待拾取机构的拾取;重复这个过程,直到PCB框架的所有焊盘上都粘有芯片后,由传输机构把PCB框架传输到收料工位,由收料机构将粘接完成的产品传送出去。
在高速粘片机中,晶片工作台机构根据CCD相机测量的数据,完成自动对准功能,要求在对准的过程中,实现精确的定位和快速的运动。
晶片台由x、y工作台及晶圆承载台组成,采用双层直线导轨工作台和滚珠丝杠副,其主要技术参数:x向总行程:220 mmy向总行程:220 mmx向单步行程:10 mmy向单步行程:10 mmx、y向定位精度:±5 μmx、y向单步运行时间:50 ms根据功能和技术参数,我们采用了双层直线导轨工作台和滚珠丝杠副,如图1。
工作台x、y向均采用四滑块工作台,采用双层结构,x方向的结构及受力如图2所示。
其中,W为工作台质量,F为外载荷。
x方向的驱动方式采用了滚珠螺杆方式,如图3所示。
3 工作台x向电机的选型计算依据选择的滚珠丝杠的型号,根据手册上相关参数及计算可知,对于工作台x向电机的选型计算做如下处理。
结合滚珠丝杠的相关参数及工作台x向的性能指标,有如下已知条件:工作台及负载:m=10kg滑动面摩擦系数:μ=0.05丝杠效率:η=0.9欲压螺帽内部系数:μ0=0.3丝杠轴径:DR=12 mm螺杆全长:LB=280mm材质:铁(=7.9×103kg/m)螺距:PB=5 mm分辨率:△l=0.5 μm移动量:l=10mm定位时间:t0=50 ms根据以上相关参数,可以算出单个脉冲时电机选择电机:我们选择了安川的SGDM系列伺服电机,型号为SGMAH-02AAA41。
其矩频特性如图4所示。
根据查阅《安川伺服电机手册》,该电机的转子的旋转惯性惯量为:J0=0.106×10-4(kg·m2) 把J0代入,求得TM为0.62 N·m,而该电机的额定扭矩为0.635 N·m,满足需要。
光栅尺采用HAIDENHAIN LIF471敞开式光栅尺,它采用干涉测量原理,其准确度等级达到3 μm,通过10倍频细分,其分辨率达到0.5μm。
它的最高测量速度达到1.2 m/s。
4 电气控制系统工作台的电器控制系统采用了工控机及PMAC多轴运动相结合模式,工作台的运动轨迹的控制由PMAC 底层软件完成。
PMAC是program multiple axis controller可编程的多轴运动控制卡。
PMAC卡是美国deltatau公司的产品,是集运动轴控制和PLC控制以及数据采集的多功能的运动控制产品,Turbo PMAC使用Motorola DSP5630X处理所有32轴的计算,其伺服周期每轴可达40 μs,两轴连动可达110 μs,编码器采样时钟频率可达10 MHz。
其时钟主频高达120MHz,最多可控制32轴连动。
它具有编码器采样时钟频率高,用户借口方便,PID算法高效,比较适合于工业控制中应用。
在本机的应用中,将电机编码器信号反馈到伺服驱动器,由驱动器闭合电流环和速度环,将光栅尺信号反馈到PMAC卡上,闭合位置环。
因为光栅尺安装于工作台上,构成了一个全闭环的系统。
放大器接受从PMAC控制卡送来的速度命令,和从电机编码器送来的速度反馈信号,因为电机由放大器闭合它的速度环,而不需要使用PMAC环的速度增益,使速度环得到较好的调节,在本系统中,PMAC的模拟输出表示一个速度命令。
速度模式放大器的关键优点是可以获得较高的硬度和较好的抗干扰能力。
因为采用了双反馈的运动控制系统,电机和负载上都有位置传感器。
一个负载上的位置传感器比在电机上的位置传感器提供了更为精确的位置测量,因为它的精度不受在电机负载连接中缺陷的影响,但是,负载上的传感器也使轴变得更加不稳定,因为这些连接缺陷,现在都在反馈环内部。
电机上的传感器,可能会使精度降低,但却提供了更好的稳定性,因为那些缺陷都不在反馈环内部。
所以,通过电机和负载上都使用传感器而获得高精度和稳定性是可能的。
负载上的LF471光栅尺的反馈信号闭合位置环,将其脉冲信号细分后分辨率可达0.5 μm,保证了定位的精确性,同时可排除间隙误差,螺距误差等的影响;通过安装于电机上的13位增量式旋转编码器闭合速度环,可以为系统提供更好的稳定性。
5 测试分析通过调节驱动器的相关参数及PMAC的PID参数的调节,工作台X向电机的位置曲线如图所示。
图中球状粗曲线为理论位置曲线,细实线组成的曲线为实际位置曲线,可知,在50 ms的时间里,工作台X方向完成了10 mm的距离,符合设计要求。