江苏大学2017年《833自动控制理论》考研专业课真题试卷
硕士研究生入学考试大纲-833自动控制理论

目录I 考查目标 (2)II 考试形式和试卷结构 (2)III 考查内容 (2)IV. 题型示例及参考答案 (3)硕士研究生入学考试《自动控制理论》考试大纲I 考查目标硕士研究生入学考试《自动控制理论》考试是具有选拔性质的考试科目。
其目的是科学、公平、有效地测试考生是否具备攻读相关专业硕士所必须的基本素质、一般能力和培养潜能,以利用选拔具有发展潜力的优秀人才入学,具体来说,要求考生:掌握控制系统的基本概念、构成原理、运行规律、基本计算分析方法等。
II 考试形式和试卷结构一、试卷满分及考试时间试卷满分为150分,考试时间180分钟。
二、答题方式答题方式为闭卷、笔试。
允许使用计算器(仅仅具备四则运算和开方运算功能的计算器),但不得使用带有公式和文本存储功能的计算器。
三、试卷内容与题型结构计算与分析题7~8题,每题20分左右III 考查内容一、经典控制理论部分1、控制系统的数学模型:掌握传递函数的概念、定义和性质,能熟练地进行结构图等效变换,熟练运用梅逊公式求系统传递函数。
2、控制系统时域分析:能熟练运用代数稳定判据判定系统的稳定性,并进行有关的分析计算,掌握计算稳态误差的一般方法,能熟练确定一阶系统、二阶系统特征参数及动态性能计算方法。
3、根轨迹法分析:理解根轨迹的基本概念,掌握根轨迹的绘制方法,包括参量根轨迹,掌握控制系统的根轨迹分析方法。
4、频率法分析:理解频率特性的概念和表达方法,掌握Nyquist 和Bode图的绘制、Nyquist 稳定判据,掌握各种频域指标的意义并会计算,掌握控制系统的频率特性分析方法。
5、控制系统的校正:掌握串联校正的设计方法,包括频率设计法和根轨迹设计法6、非线性控制系统的分析方法:掌握用相平面法分析非线性系统状态的变化过程、相平面图与有关性能指标的关系。
7、线性离散控制系统分析:掌握Z变换,会求系统的脉冲传递函数,掌握离散系统的稳定性分析、误差分析方法和已知系统的动态性能分析。
自动控制原理试卷含答案4套完整(免费)
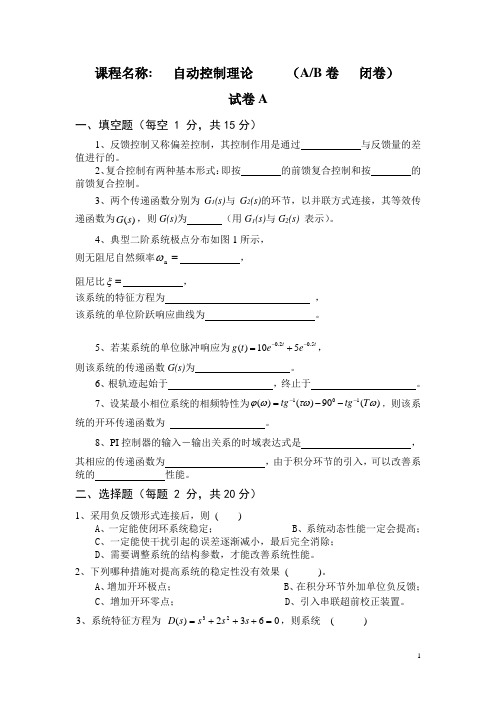
课程名称: 自动控制理论 (A/B 卷 闭卷)试卷A一、填空题(每空 1 分,共15分)1、反馈控制又称偏差控制,其控制作用是通过 与反馈量的差值进行的。
2、复合控制有两种基本形式:即按 的前馈复合控制和按 的前馈复合控制。
3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 (用G 1(s)与G 2(s) 表示)。
4、典型二阶系统极点分布如图1所示,则无阻尼自然频率=n ω ,阻尼比=ξ ,该系统的特征方程为 ,该系统的单位阶跃响应曲线为 。
5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为 。
6、根轨迹起始于 ,终止于 。
7、设某最小相位系统的相频特性为101()()90()tg tg T ϕωτωω--=--,则该系统的开环传递函数为 。
8、PI 控制器的输入-输出关系的时域表达式是 , 其相应的传递函数为 ,由于积分环节的引入,可以改善系统的 性能。
二、选择题(每题 2 分,共20分)1、采用负反馈形式连接后,则 ( )A 、一定能使闭环系统稳定;B 、系统动态性能一定会提高;C 、一定能使干扰引起的误差逐渐减小,最后完全消除;D 、需要调整系统的结构参数,才能改善系统性能。
2、下列哪种措施对提高系统的稳定性没有效果 ( )。
A 、增加开环极点;B 、在积分环节外加单位负反馈;C 、增加开环零点;D 、引入串联超前校正装置。
3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( )A 、稳定;B 、单位阶跃响应曲线为单调指数上升;C 、临界稳定;D 、右半平面闭环极点数2=Z 。
4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( )A 、 型别2<v ;B 、系统不稳定;C 、 输入幅值过大;D 、闭环传递函数中有一个积分环节。
自动控制原理 试卷 全大题 完整答案..
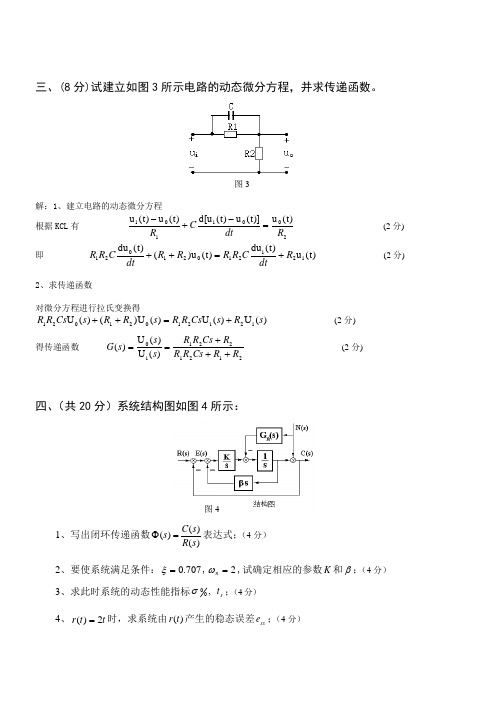
三、(8分)试建立如图3所示电路的动态微分方程,并求传递函数。
图3解:1、建立电路的动态微分方程 根据KCL 有 200i 10i )t (u )]t (u )t (d[u )t (u )t (u R dt C R =-+- (2分)即 )t (u )t (du )t (u )()t (du i 2i 21021021R dtC R R R R dt CR R +=++ (2分)2、求传递函数对微分方程进行拉氏变换得)(U )(U )(U )()(U i 2i 21021021s R s Cs R R s R R s Cs R R +=++ (2分)得传递函数 2121221i 0)(U )(U )(R R Cs R R R Cs R R s s s G +++==(2分)四、(共20分)系统结构图如图4所示:1、写出闭环传递函数()()()C s s R s Φ=表达式;(4分) 2、要使系统满足条件:707.0=ξ,2=n ω,试确定相应的参数K 和β;(4分) 3、求此时系统的动态性能指标s t ,00σ;(4分)4、t t r 2)(=时,求系统由()r t 产生的稳态误差ss e ;(4分)图45、确定)(s G n ,使干扰)(t n 对系统输出)(t c 无影响。
(4分)解:1、(4分) 22222221)()()(n n n s s K s K s K sK s K s Ks R s C s ωξωωββ++=++=++==Φ 2、(4分) ⎩⎨⎧=====2224222n n K K ξωβω ⎩⎨⎧==707.04βK3、(4分) 0010032.42==--ξξπσe83.2244===ns t ξω4、(4分) )1(1)(1)(2+=+=+=s s K s s K sK s K s G βββ ⎩⎨⎧==11v K K β414.12===βKss K Ae 5、(4分)令:0)()(11)()()(=s s G ss K s N s C s n n ∆-⎪⎭⎫ ⎝⎛+==Φβ 得:βK s s G n +=)(五、(共15分)已知某单位反馈系统的开环传递函数为2()(3)rK G s s s =+:1、绘制该系统以根轨迹增益K r 为变量的根轨迹(求出:渐近线、分离点、与虚轴的交点等);(8分)2、确定使系统满足10<<ξ的开环增益K 解;1、绘制根轨迹 (8分)(1)系统有有3个开环极点(起点):0、-3、-3(2)(2)实轴上的轨迹:(-∞,-3)及(-3,0); (1分)(3) 3条渐近线: ⎪⎩⎪⎨⎧︒︒±-=--=180,602333a σ (2分) (4) 分离点: 0321=++d d 得: 1-=d (2分)432=+⋅=d d K r (5)与虚轴交点:096)(23=+++=r K s s s s D[][]⎩⎨⎧=+-==+-=06)(Re 09)(Im 23r K j D j D ωωωωω ⎩⎨⎧==543r K ω (2分) 绘制根轨迹如右图所示。
3套自动控制理论自考题真题及答案
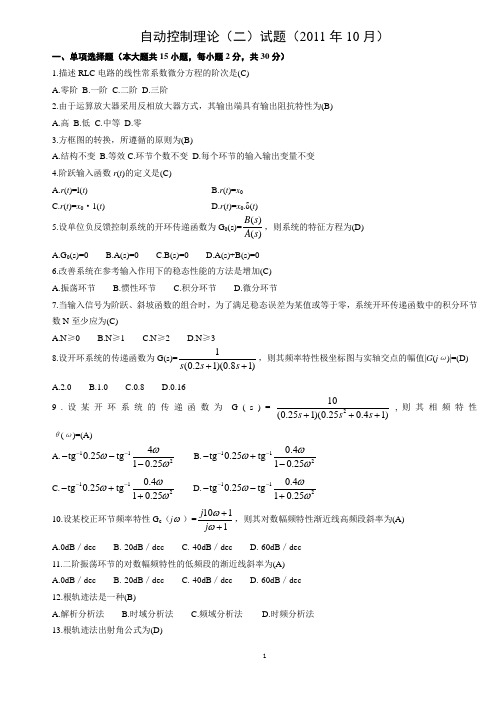
自动控制理论(二)试题(2011年10月)一、单项选择题(本大题共15小题,每小题2分,共30分)1.描述RLC 电路的线性常系数微分方程的阶次是(C)A.零阶B.一阶C.二阶D.三阶2.由于运算放大器采用反相放大器方式,其输出端具有输出阻抗特性为(B)A.高B.低C.中等D.零3.方框图的转换,所遵循的原则为(B)A.结构不变B.等效C.环节个数不变D.每个环节的输入输出变量不变4.阶跃输入函数r (t )的定义是(C)A.r (t )=l(t )B.r (t )=x 0C.r (t )=x 0·1(t )D.r (t )=x 0.δ(t )5.设单位负反馈控制系统的开环传递函数为G 0(s)=()()B s A s ,则系统的特征方程为(D) A.G 0(s)=0 B.A(s)=0 C.B(s)=0 D.A(s)+B(s)=06.改善系统在参考输入作用下的稳态性能的方法是增加(C)A.振荡环节B.惯性环节C.积分环节D.微分环节7.当输入信号为阶跃、斜坡函数的组合时,为了满足稳态误差为某值或等于零,系统开环传递函数中的积分环节数N 至少应为(C)A.N ≥0B.N ≥1C.N ≥2D.N ≥38.设开环系统的传递函数为G(s)=1(0.21)(0.81)s s s ++,则其频率特性极坐标图与实轴交点的幅值|G (j ω)|=(D) A.2.0 B.1.0 C.0.8 D.0.16 9.设某开环系统的传递函数为G (s )=210(0.251)(0.250.41)s s s +++,则其相频特性 θ(ω)=(A) A.1124tg 0.25tg10.25ωωω----- B.1120.4tg 0.25tg 10.25ωωω---+- C.1120.4tg 0.25tg 10.25ωωω---++ D.1120.4tg 0.25tg 10.25ωωω----+ 10.设某校正环节频率特性G c (j ω)=1011j j ωω++,则其对数幅频特性渐近线高频段斜率为(A) A.0dB /dec B.-20dB /dec C.-40dB /dec D.-60dB /dec11.二阶振荡环节的对数幅频特性的低频段的渐近线斜率为(A)A.0dB /decB.-20dB /decC.-40dB /decD.-60dB /dec12.根轨迹法是一种(B)A.解析分析法B.时域分析法C.频域分析法D.时频分析法13.根轨迹法出射角公式为(D)A.111=180m n i j i j θαβ-==±--∑∑ B.111=180m n i j i j θαβ-==±-+∑∑ C.111=180m n ij i j θαβ-==±++∑∑ D.111=180m n i j i j θαβ-==±+-∑∑14.PID 控制器是一种(C)A.超前校正装置B.滞后校正装置C.滞后—超前校正装置D.超前—滞后校正装置15.某二阶系统状态方程的可控标准形为(B)A. 1 -20=0 -31x x u ⎡⎤⎡⎤+⎢⎥⎢⎥⎣⎦⎣⎦B.0 10= 2 -31x x u ⎡⎤⎡⎤+⎢⎥⎢⎥-⎣⎦⎣⎦C.0 -20=1 -31x x u ⎡⎤⎡⎤+⎢⎥⎢⎥⎣⎦⎣⎦D. 1 10= 2 -31x x u ⎡⎤⎡⎤+⎢⎥⎢⎥-⎣⎦⎣⎦二、填空题(本大题共10小题,每小题1分,共10分)请在每小题的空格中填上正确答案。