光具组基点测定
光具组基点的测定及数据处理

光具组基点的测定及数据处理光学仪器的使用需要进行精密的测量和校准,其中基点的测定是非常关键的一个环节。
本篇文章将阐述基点的测定方法以及数据处理过程。
一、基点的定义基点是指平面、球面或非球面透镜等镜面内部的一个确定点,用来确定这个镜面的位置和方向。
基点的测定有助于保证光学系统的精度和稳定性。
基点的测定需求专门的设备和技术。
通常需要使用干涉仪或等曲面仪等测量装置,并采取以下步骤进行测定:1. 拍摄干涉图或等曲面图:将需要测定基点的镜面放置在测量装置的平台上,通过干涉仪或等曲面仪等装置拍摄出对应的干涉图或等曲面图。
2. 分析干涉图或等曲面图:利用专业软件对拍摄的干涉图或等曲面图进行分析,可以得出关于测量装置和被测品的相关信息,包括镜面的曲率半径、球心位置、基点坐标等。
3. 精确测量基点位置:根据干涉图或等曲面图给出的粗略坐标位置,使用高精度的探针或测量仪器对基点位置进行进一步精确测量。
三、基点数据处理过程对于测定得到的基点数据,需要通过一系列的数据处理过程进行分析和计算,以确定其精确的位置和方向。
具体步骤如下:1. 基点分布分析:通过分析多个基点的坐标和权重,确定基点的分布情况,从而保证基点数据的准确性和可靠性。
2. 基点修正处理:遇到基点坐标不准确或基点间距不合理等问题,需要进行基点修正处理,以保证基点数据的精度和合理性。
3. 基点参数计算:基于测得的基点数据,计算出包括球心位置、曲率半径、基点的坐标等参数,从而确定光学系统的精度和优化方案。
综上所述,基点的测定及数据处理是光学仪器使用中非常关键的步骤之一,能够有效提升仪器性能和应用效果,因此需要重视和加强相应的技术和管理。
3.9理想光具组的基点和基面

u
h F1 H1
u1 H1
F1
H 2 F2
h
u2 F2 H 2 h u2 F H
f1
f2
f 2
f1
d
d H1H2 f f2, 可正可负;
x 2 xH
f
F1F2,称为光学间隔可正可负,可为零.
当 n n时 有 1,所以在此情况下,主点与
节点重合. 利用两者重合的性质,并根据系统绕 节点作不大的转动时,平行光所生的像不发生 位移的特点,可确定主点和节点的位置,从而 确定任意复杂系统的焦距 .
确定节点,主点实验光路图
F
H N
F
利用主点和节点重合的性质,并根据系统绕节点作不大的转 动时,平行光所成的像不发生位移的特点,可确定主点的位置, 从而能确定任意复杂系统的焦距.
f f2 x2 . f1 f 2
因 F1和 F 关于子系统Ⅱ共轭,
按高斯公式应有:
(5)
f2 f2 1. f2 x2 ( f2 )
按牛顿公式 应有 x2 f2 f2,
或
x2
f 2 f 2 ,
(6) (7)
HF F N , H N FN,
证明
且有
HH NN.
证明
六个基点中,只有四个是独立的.但四个中必须至少有一 个是焦点.
F
平物 面方
焦
M
M
i
N N H H
R R
平物平像 面 方面 方
主主
F i
平像 面方
焦
共轴球面系统的物距 s HS, 像距 s H S,
横向放大率法测定光具组的基点
次数 1 2 3 4 5
Δs/ cm - 11128 - 10180 - 5150 - 8179 - 5107
Δs′/ cm - 2116 - 10160 - 19152 - 10164 - 1123
β1
β2
f / cm f ′/ cm
- 01564 - 01345 - 10101 9186
L IU Zhu2qin
(College of Physics and Electronic Information , Yanan University , Yanan 716000 ,China)
Abstract :The t heory and met hod of using lateral magnification to determine t he cardinal point of compound optical system are int roduced. Since CCD is used ,t he high measurement precision is obtained.
第 25 卷第 8 期 2006 年 8 月
大 学 物 理 COLL EGE PH YSICS
Vol. 25 No. 8 Aug. 2006
横向放大率法测定光具组的基点
刘竹琴
(延安大学 物理与电子信息学院 ,陕西 延安 716000)
摘要 :介绍了用横向放大率法确定两薄透镜组成的光具组基点的原理和方法 ,该方法采用线阵光电耦合器件 (CCD) 测量 物经光学系统成像的横向放大率 ,进一步提高了测量精度.
- 11652 - 01596 - 10106 10103
- 31125 - 11156 - 10109 9191
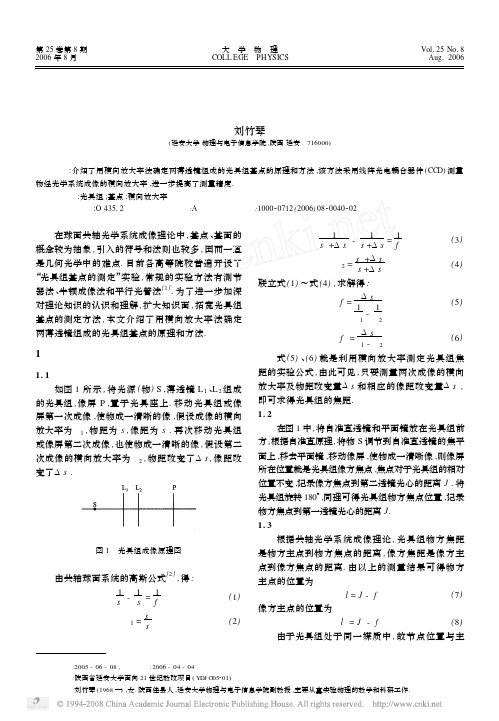
2实验 光具组基点的测定
实验2 光具组基点的测定一、实验目的1、加强对光具组基点的认识2、学习测定光具组基点和焦距的方法二、实验仪器光具座、测节器、薄透镜、物屏、准直透镜、光源、像屏、平面镜三、实验原理1、基点的概念:常用的光学系统,一般都是由单透镜或两(或多)透镜组成的共轴球面系统统,整个系统可以由主点、节点和焦点来表示其特性。
当这三者确定后,其光学特性也就确定了。
主点:横向放大率β=1的一对共轭点。
(H, H ’)节点:角放大率γ=1的一对共轭点。
(N, N ’)焦点:平行主轴的光线经系统折射后与主轴的焦点称为焦点。
(F, F ’)当光具组处在同一媒质中时,其前后主点与 前后节点分别重合,其前后焦距也相等。
这时从后节点(即后主点)到后焦点的距离即为光 具组的后焦距。
这样我们就可以通过测定节点来确定光具组的主点。
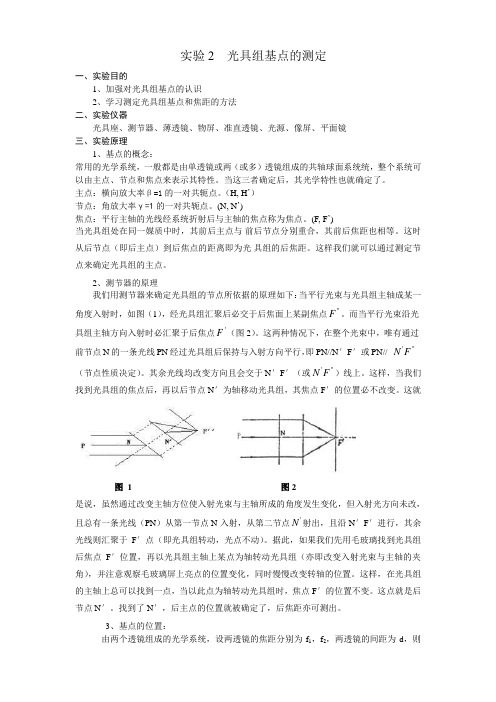
2、测节器的原理我们用测节器来确定光具组的节点所依据的原理如下:当平行光束与光具组主轴成某一 角度入射时,如图(1),经光具组汇聚后必交于后焦面上某副焦点''F 。
而当平行光束沿光 具组主轴方向入射时必汇聚于后焦点'F (图2)。
这两种情况下,在整个光束中,唯有通过 前节点N 的一条光线PN 经过光具组后保持与入射方向平行,即PN//N ′F ′或PN// '''F N (节点性质决定)。
其余光线均改变方向且会交于N ′F ′(或'''F N )线上。
这样,当我们找到光具组的焦点后,再以后节点N ′为轴移动光具组,其焦点F ′的位置必不改变。
这就图 1 图2 是说,虽然通过改变主轴方位使入射光束与主轴所成的角度发生变化,但入射光方向未改,且总有一条光线(PN )从第一节点N 入射,从第二节点'N 射出,且沿N ′F ′进行,其余光线则汇聚于F ′点(即光具组转动,光点不动)。
据此,如果我们先用毛玻璃找到光具组后焦点F ′位置,再以光具组主轴上某点为轴转动光具组(亦即改变入射光束与主轴的夹角),并注意观察毛玻璃屏上亮点的位置变化,同时慢慢改变转轴的位置。
实验二光具组基点的测定
实验二光具组基点的测定一、实验目的通过测量光具组的基点,掌握测量光学器件的方法和技能,并了解基点在光学实验和光学系统设计中的应用。
二、实验原理1. 光具组基点光具组基点是指光具组的前面和后面的两个主焦点之间的距离。
在光学器件和系统的设计和应用中,基点是一个重要的参数,它代表了透镜或透镜系统在几何或物理意义下的位置。
测定基点的值可以直观地反映出光学元件的质量和性能,也可以根据测量结果对光学系统进行优化设计。
光具组基点的测量可以采用大擎法、法线交点法和伏安法等方法。
其中大擎法是最常用的方法,其基本原理如下:设有一组光学器件组成的光具组,由两个物点垂直于光轴投射出的两条光线,分别在光具组前后的主面处经过,可以得到两个相交点P1和P2,其连线PP’垂直于光轴。
若在光具组前后分别设有一块白底黑字的标尺,测得P1P’和P2P’的长度,以及PP’的长度,则有:$\frac{1}{f}=\frac{1}{P_{1}P^{\prime}}+\frac{1}{P_{2}P^{\prime}}$$d = P_1P_2 = P_1P^{\prime} - P_2P^{\prime}$式中,f是光学器件组的焦距,d是光具组的基点。
三、实验仪器光学器具: 凸透镜、凹透镜各一枚。
测量仪器:测微计、显微镜、棱镜等。
四、实验步骤1. 制作标尺在一块白色硬纸板或塑料片上印上黑色标尺,规格为1毫米,长度为10厘米。
在标尺两侧分别绘制黑色箭头,方便观测和读数。
2. 测量前置透镜焦距将凸透镜放在光学架上,测量前置透镜的焦距,记录数据。
3. 测量具有正焦距的光具组基点将凸透镜作为前置透镜,凹透镜作为后置透镜组成具有正焦距的光具组,并将标尺固定在透镜的距离上。
调整标尺至垂直于光轴,并调整光源位置,使两束光线分别经过前置透镜和后置透镜并交于轴上。
在标尺两侧观察交点P1和P2的位置,测量P1P’和P2P’的长度,并计算出基点d的值。
5. 计算结果根据测量结果计算光具组的基点d,并将其与理论值进行比较和分析。
光具组的基点测定

光具组的基点测定【实验目的】(1)了解测节器的构造及工作原理。
(2)加深对光具组基点的理解和认识。
(3)学会利用测节器测定光具组的主点及焦距。
【实验仪器】光学平台或光具座,测节器,薄透镜,物屏,光源,准直透镜(焦距大一些),平面反射镜,光具组,白屏,毫米尺,测微目镜。
【实验方法和步骤】(1)将光源、物屏S P 、准直物镜L 、测节器R 及白屏P '沿米尺置于光学平台或光具座上,调节其共轴。
(2)用自准方法调节物屏P 位于准直物镜L 的物方焦面上,调好后记录P 的位置,用毫米尺替换物屏P ,并保持毫米尺和L 的位置均不要再移动。
(3)测量准直物镜及透镜L 1L 、的焦距12L f '、2f '。
(4)将透镜1L 和按2L (21f f d )'+'〈组成光具组,置于测节器架上,调其共轴。
(5)照亮毫米尺,沿测节器架导轨前后移动透镜组,同时相应地前后移动白屏P '得到清晰的毫米尺像;轻轻小角度转动测节器,直至白屏上毫米尺像无横向移动为止,此时像方节点即在测节器架的转轴N 'Q Q '上;可用测微目镜观察毫米尺像。
(6)如步骤(5)中用测微目镜观察毫米尺像,此时改用白屏接收毫米尺像。
分别记录轴和焦点在米尺导轨上的位置,并从测节器导轨上记下的位置。
重复几次。
Q Q 'F '2L (7)将光具组转180度,此时原来的节点成为N N ',同上进行测量。
(8)绘图表示光具组主面及焦点的位置,计算焦距f '之值。
(9)取(21f f d )'+'〉,重复上述测量。
【思考题】1、第一主面靠近第一个透镜,第二个主面靠近第二个透镜,在什么条件下才是对的?(光具组由二薄透镜组成)。
2、由一凸透镜和一凹透镜组成的光具组,如何测量其基点(距离d 可自己设定)?。
【精选】光具组基点的测定
【精选】光具组基点的测定光具组是指由一束光线通过多个光学元件组成的光路系统。
在实际光学设计和制造中,精确地确定光具组的基点是非常重要的。
本文将介绍光具组基点的测定方法。
一、测定基点的目的在光学元件的加工和组装过程中,需要确定光学元件的位置和方向,以保证光路的精确性和稳定性。
而光学元件的位置和方向则是由光具组基点决定的。
因此,测定光具组基点是非常重要的。
1. 光桥法光桥法是一种简单而有效的测量光具组基点的方法。
它的原理是利用光桥法测量光具组两端的光程差,然后根据光程差计算出光具组基点的位置。
具体操作步骤如下:(1)利用光源照明光具组的两端,并通过衰减器调节光源强度。
利用两个光电池检测光路,其中一个光电池放置在光具组的一端,另一个光电池放置在光具组的另一端。
(2)利用微调平移台,调整光电池的位置,使其所接收到的光强尽可能相等。
(3)测量光电池所接收到的光强,然后计算出光程差。
根据光程差和光速的知识,可以计算出光具组基点的位置。
2. 共面法(1)利用光源照明光具组的一端,并通过调节器调节光源强度和光位于成像平面的位置。
(2)调节另一个光学元件(如屈光度)在光路中停留,使其成像平面与前一个光学元件的成像平面重叠。
(3)用标尺量取两个成像平面的位置,然后计算出光具组基点的位置。
三、测定基点的注意事项1.测量环境:当进行光桥法测量时,为了保证测量的准确性,应将测量仪器放置在光学实验室或无风环境中。
2.精密仪器:测定光具组基点需要使用一些精密仪器,如光学平台、微调平移台、光电池等。
这些仪器必须具有精确的测量性能。
3. 测量精度:测定光具组基点的精度直接影响光路的精正确位,因此需要在测量过程中严格控制误差。
测量时最好使用数值计算方法来提高测量的精确度。
4. 稳定性:测量光具组基点的时候,需要保证光路的稳定性,最好是将光路固定住,保证其在测量过程中不发生移动。
五、总结测定光具组基点是非常重要的,可以有效保证光路系统的精确性和稳定性。
透镜组节点和焦距的测定

A S1
M
S
L
S2
B
P1
△x
x
P2
D
图 10-2
棱 脊
端面
棱角
图 10-3
将一块平玻璃板的上表面加工成两楔形板,端面与棱脊垂直,楔角 A 较小(一 般小于 1°)。从单色光源 M 发出的光波经透镜 L 会聚于狭缝 S,使 S 成为具有较 大亮度的线状光源。当狭缝 S 发出的光波投射到双棱镜 B 上时,经折射后,其波 前便分割成两部分,形成沿不同方向传播的两束干柱波。通过双棱镜观察这两束 光,就好象它们是由虚光源 S1 和 S 2 发出的一样,故在两束光源相互交叠区 P1 P2 内 产生干涉。如果双棱镜的棱脊和光源狭缝平行,且狭缝的宽度较小,便可在白屏 P 上观察到平行于狭缝的等间距干涉条纹。
7:三维平移底座 (SZ-01) 8:升降调整座(SZ-03) 9:二维平移底座 (SZ-02) 10:升降调整座(SZ-03) 11:普通底座(SZ-04)
1
2
S
3
4
Lo
56
7
Le
12
11
10
9
8
图 8-1
实验原理 开普勒望远镜所成的像是倒立的,对观察物体不习惯,如观察正像,一是可 以使用伽利略望远镜,二是可以借助直角棱镜(保罗棱镜、正像棱镜) 直角棱镜原理图如图 8-2,正立的像转换为倒立的像。
将随各组合透镜或折射面的焦距和系统的空间特性而异。下面以两个薄透镜的组
合为例进行讨论。设两薄透镜的象方焦距分别为 f1′ 和 f2′ ,两透镜之间距离为 d,
则透镜组的象方焦距 f ′ 可由下式求出
f′=
f1′f2′ , f = − f ′ .
( f1′ + f2′) − d
一种测量光具组基点的新方法

Ne m eh d o e s r m e to r n lPo n fa Co p u d w t o fM a u e n fCa di a i to m o n O p ia y t m tc lS se
2 c 01 f hs s n lc oi Ifr t n Y n a nvr t, a ’n7 6 0 S an i .Sh o o yi dEet nc no i , a ’nU i s y Y n a 1 0 0, h ax) P ca r ma o ei
Absr c t a t:Ne meh d o a u e ntft e c r i a onto pt a y tm s ito u e L tr lma n fc to o w t o fme s r me o h a d n lp i fo i ls se i n r d c d. a e a g i a in t c i
牛顿 成像 法 、 向放 大 率 法 、 次 成 像 法 进 行 了测 横 二
量。本文再介绍一种利用横向放大率法来确定两薄
透镜 组成 的光 具 组基 点 的原理 和方 法 。
1 测量 原理及 测 量方 法
1 1 自准直透 镜 焦距 的测 量 .
f /
/ \
/
/
使之共轴等高。移动透镜 L , 0当物 P放在透镜 L 的 0 物方焦面上时 , 由物 P发出的光经透镜 I后将成为 J 0 平行光 , 再经平面反射镜 M反射后将沿原来 的路线 反方 向进 行 , 成像 于 物平 面 上 , P与 L之 间 的 并 则 0 距离就是 自准直透镜 L的像方焦距厂 , 0 。则物方焦距 为f = - 。 0 f。 1 2 确 定 焦点 的位 置 . 将物 P调节到 自准直透镜 L 的焦平面上后 , n 移 去 平 面镜 , 自准直 透镜 L的前 方依 次 放 置 待测 光 在 0 具 组 L 、: 由两薄 透镜 L 、 成 ) 像屏 Q, 图 L ( L组 和 如 2 所示 , 移动像屏 Q, 物成一清晰像 , 像屏所在 使 则 位 置就 是光 具组 像 方 焦 点 , 点 对 于 光具 组 的相 对 焦 位置不变 , 因此 , 记录第二透镜 L 光心到像方焦点 的距离 J。将光具组旋转 10 , 8 。同理可得 , 光具组物 方 焦点 位 置 , 录第 一透 镜 L光 心 到物 方 焦 点 的距 记
理想光具组的基点和基面

3D打印技术为光具组的快速原型制造和个性化定制提供了可能,缩短了产品研发周期,降低了生产成本。
新技术的应用
人工智能技术
人工智能技术在光具组设计中的应用,可以实现光具组的智能优化和自动调整,提高光 具组的性能和稳定性。
机器视觉技术
机器视觉技术的应用,使得光具组能够实现快速、准确的目标识别和定位,提高了光具 组在自动化生产线上的应用价值。
基点的性质
基点具有唯一性
对于给定的光线和光具组,基点 是唯一的,即光线在光具组中只 经过一个基点。
基点具有对称性
在理想光具组中,基点通常位于 透镜或反射镜的中心,使得光线 在入射和出射时具有对称性。
基点的应用
基点用于计算光线的折射和反射角
通过基点和光线的入射角,可以计算出光线的折射角或反射角。
基点用于确定光线的路径
理想光具组的基点和基面
contents
目录
• 理想光具组的基点 • 理想光具组的基面 • 理想光具组基点与基面的关系 • 理想光具组的应用实例 • 理想光具组的发展趋势与展望
01 理想光具组的基点
基点的定义
ห้องสมุดไป่ตู้
01
基点是光具组中光线发生折射或 反射的点,通常位于透镜或反射 镜的表面。
02
在理想光具组中,基点被认为是 光线入射和出射的唯一点,不考 虑实际光学元件的形状和大小。
理想光具组的概念在望远镜设计中非常重要,它涉及到镜面形状、曲率、反射和 折射等参数的精确计算和控制,以确保望远镜能够准确聚焦并生成清晰的图像。
显微镜
在显微镜设计中,理想光具组的应用同样关键,它决定了显微镜的放大倍数、景 深、分辨率等性能指标。
光学成像系统
数码相机
实验四光具组基点的测定
实验四光具组基点的测定本实验是通过光具组基点的测量来了解并掌握光具组的基础知识和操作技能,提高学生的实践能力。
光具组是一些光学元件组成的光学系统,如透镜、凸透镜等。
光具组的基点是指当光路中有多个透镜时,使得像的位置不变而光线斜率不变的点,它在光学系统中的位置非常重要,是设计和计算光学系统参数的基础。
实验过程:1.实验器材与量具:(1)光具组;(2)三脚架、万能夹、刻度尺、游标卡尺、毫米纸等。
2.实验步骤:(1)将光具组放在三脚架上;(2)使用游标卡尺量取物距,即将光具组前方的物体距离;(3)使用目镜测量成像距离,即得到在光具组后方成像的距离;(4)反射式光具组进行实验时,将物体放置在同一方向,同一位置;(5)测量多次,取平均值。
实验数据处理:(1)计算焦距:1/f = 1/v + 1/u,其中u为物距,v为像距。
(2)计算基点位置:基点位置 = (V - F ) - D,其中V为成像距离,F为焦距,D为光具组长度。
实验结果:透镜:物距(u)/cm 5 10 15 20成像距离(v)/cm 2.61 5.02 7.4 9.8焦距 (f)/cm 3.24 6.05 9.28 12.9基点位置 (B)/cm 1.75 2.66 2.05 1.03凸透镜:总结:本次实验主要是计算光具组焦距和基点位置,并通过实验器材和量具的测量得出了实验数据。
实验结果表明透镜的基点位置随着物距的增加而减小,且基点位置随着透镜长度的增加而变小,而对于凸透镜,基点位置随着物距的增加而增大,且基点位置随着透镜长度的增加而变大。
本实验有助于加深理解光学原理,提高实验能力。
光具组基点的测定
光具组基点的测定光具组基点的测定是光学检验中的基本工作之一。
它是指在光学仪器(如望远镜、显微镜、投影仪等)的使用前,通过测量光学仪器的光学特性,即其寻心点、主轴和成像位等参数,确定光具组装的正确位置和朝向,以保证仪器的精度和稳定性。
测定光具组基点的方法多种多样,根据测量的要求和实验条件可以选择不同的测量方法。
下面将介绍几种常见的测定方法。
1、白光干涉法白光干涉法是一种基于干涉现象的测量方法,其原理是利用白光通过待测物体后形成的干涉图样来测定光具组的基点。
该方法不仅可以测定光具组的基点位置,还可以同时测定其主轴方向和成像位,因此被广泛应用于望远镜、显微镜等精密光学仪器的制造和调整中。
白光干涉法主要有两种形式:单独测定法和合成法。
单独测定法是指在一定的条件下,通过测量干涉图样中线的位置和形态,确定光具组的基点和主轴方向。
合成法则是通过测量干涉图样中的条纹密度来确定成像位,从而确定光具组的完整位置和朝向。
2、 laser干涉法laser干涉法是利用激光光源产生的干涉条纹来测定光具组基点的一种方法。
其中,激光束被分成两个光路,一个是参考路径,另一个是测试路径,它们在待测的光具组中产生干涉条纹。
通过调整光具组的位置和朝向,使干涉条纹稳定并且具有特定的形态,即可确定光具组的基点和主轴方向。
laser干涉法具有高精度、高灵敏度、全自动化等优点,广泛应用于各种精密光学设备的制造和调整中。
同时,它也能够有效地检测光具组的偏差和误差,为进一步优化光学性能提供有力的支持。
3、线扫描法线扫描法是一种基于光学衍射的测量方法。
它利用线状光源产生的衍射板上的衍射条纹来测量光学元件的位置、朝向和成像性能。
该方法可以使用光学显微镜或扫描电镜来观察和记录衍射条纹,从而确定光具组的基点位置和主轴方向。
线扫描法不需要任何复杂的设备和技术,而且具有测量速度快、精度高、适用范围广等优点,在制造和检测光学元件时被广泛应用。
总之,测定光具组基点是精密光学制造和调整的重要工作之一,需要根据不同光学元件的特点和实验条件选择适合的测量方法。
实验七 光具组基点的测定
对于由薄透镜组合成的共轴球面系统,其物和像的位置可由高斯公式: 1 = 1 − 1 ………………………………① f ' p' p
实验七 光具组基点的测定
[实验目的] 1.加强对光具组基点的认识 2.学习测定光具组基点和焦距的方法
[实验器材] 光学参数测定仪(YJC)<包括平行光管,凸透镜 4 块,凹透镜 1 块,像屏等>
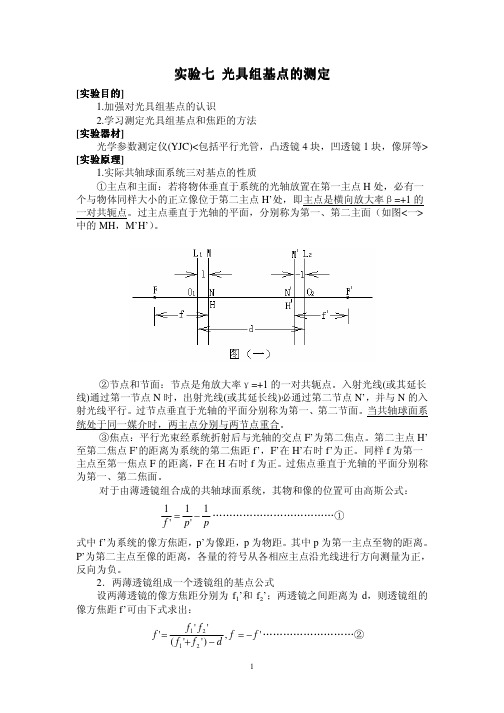
[实验原理] 1.实际共轴球面系统三对基点的性质 ①主点和主面:若将物体垂直于系统的光轴放置在第一主点 H 处,必有一
=,
l=;+ f5 ') − d
=,
③实验与理论公式计算的结果进行比较及评价
4
f ' = f1 ' f2 ' , f = − f ' ………………………② ( f1 '+ f2 ') − d
1
两主点位置
l' = − f 2 ' d ………………………③ ( f1 '+ f2 ') − d
l=
f1 ' d …………………………④
( f1 '+ f2 ') − d
注意:l’是从第二透镜光心量起,H’在第二透镜 O2 左为负,l 是从第一透镜 光心量起,H 在第一透镜 O1 左为负。
理论公式②与③比较 (2)将上导轨旋转 1800,测出 l 与 f,与理论公式比较。
光具组基点的测定
光具组基点的测定摘要:本文通过运用透镜组基点的特性来用焦距仪和节点架两种方法来测定透镜组的基点,并且比较这两种测量方法的测量精度。
关键字:透镜组基点节点架焦距仪。
引言单个透镜往往无法满足实验或者实际生活中的需要,实际使用时往往将几个薄透镜组合成透镜组进行使用。
对于任何共轴光具组,不论其结构复杂与否,物像之间的共轭关系完全由几对特殊的点和面所决定,这就是共轴理想光具组的基点和基面。
在透镜组之中各个透镜的焦距以及透镜之间的焦距未知的情况下,采用焦距仪或者测节器可以测定光具组的基点和基面,进而得到光具组的一些特性。
原理简述:关于本实验的几个概念:1.透镜组:两个或者两个以上的薄透镜或厚透镜组成的共轴球面系统。
2.基点:为了描述透镜组物像之间的共轭关系的点就是基点,包括一对焦点,一对节点和一对主点。
3.焦点:透镜组的焦点和焦面的的定义与薄透镜的焦点和焦面相同,即与无穷远物平面共轭的为像方焦面,轴上的点就是像方焦点,反之则是物方焦面和物方焦点。
主点和主平面:横向放大率恒为1的一对共轭面,就是主平面,属于物方的叫物主面,属于像方的叫做像方主面,属于像方的叫做像方主面,其轴上的对应的点分别是物方主点和像方主点。
节点和节平面:当系统入射的光线(或延长线)通过第一节节点(物方节点)时,则系统出射的光线一定通过第二节点(像方节点),并与入射光线平行,即节点是角放大率为1的一对共轭点,通过节点做垂直于光轴的平面就是节平面。
由于透镜组两边的物质都是空气,所以物方和像方的媒质上网折射率相等时,节点与主点相同。
焦距仪测量透镜组的基点:如图一所示,设L 为已知焦距等于f0的凸透镜L0S0为待测透镜组,其主点(节点)为H 、H ’(N 、N ’),焦点为F 、F ’。
当AB (其长度已知)放在L 的前焦点F0处时,它经过L 以及L0S0成像A ’B ’于L0S0的后焦面上。
因为AO//A ’N ’, AB//A ’B ’, OB//N ’B ’,所以△AOB ∽△A ’N ’B ’,即AB:f0=A ’B ’:f ’∴ 'A 'B 'f ABf 焦点与节点的测量:设通过 R 0M 0看清某一物体a 时,a 与R 0M 0的距离为c ,此时R 0M 0的位置读数为X 0,假设通过R 0M 0先后看清参考点Q 和F ’时,R 0M 0的位置读数分别为X Q 和X F ’,则QF ’= XF ’-XQF ’的位置相对于Q 点的位置确定,N ’F ’=f ’,此时就可以确定节点的位置 实验步骤:1. 由自准法找出L 的位置,将毫米尺放在L 的前焦面上。
光学系统基点测量实验实验报告

课程名称:应用光学
实验项目名称:光学系统基点测量实验
图1 透镜组光路示意图
图2 节点位置判定图3回转轴通过光具组节点本实验以两个薄透镜组合为例,主要讨论如何测定透镜组的节点,并验证节点跟主点重合。
双光组
也是最基本的组合如图4所示。
L-S为待测透镜组,设L为已知透
图4 双光组组合光路示意图
则透镜组焦距为:
俯视图
主视图
图5 节点镜头读数
透镜之间的距离可通过节点镜头上方的刻度读取,刻度给出的距离为平凸透镜的平面所在位置,平凸透镜的物方主平面和球面顶点相切。
因此就算时需要加入透镜的厚度,f200mm透镜的厚度为透镜的厚度为6.5mm。
所示,f350mm透镜距离节点镜头0点距离为30mm,f200mm透镜距离节点镜头
图6 透镜基点测量实验装配图
要求:如实记录实验过程和现象以及相关数据,图表绘制要规范。
图7 物方节点测量数据
图8 节点镜头上方读数
图9 像方节点数据
六、实验数据分析及思考题:
要求:对实验数据进行分析,回答实验讲义或实验现场遇到的思考题。
对物方节点来说:
+8.5+6.5=91mm
f2=91−200−350=−459mm
=−419.4mm
=350×(200+350)
−459。
光具组基点的测定及数据处理
光具组基点的测定及数据处理光具组基点的测定是光学测量中的重要任务之一,主要用于确定光具组的位置和方向。
对于一个光学系统来说,光具组的基点包括焦点、光心、主点和节点等。
这些基点对于系统的成像特性、光束的变换以及光学仪器的设计和制造都非常重要。
下面将详细介绍光具组基点测定的基本原理和数据处理方法。
一、基本原理光具组基点的测定主要基于几何光学的基本原理。
在理想情况下,光线在通过光学系统后应该汇聚到一点,这个点就称为焦点。
而光线的中心或者说是光束最窄的地方则称为光心。
主点则是入射光线和出射光线之间的交点,通常在系统的对称轴上。
节点则是光线通过透镜或其他光学元件后发生折射或反射的点。
在实际应用中,我们通常使用透镜作为光学元件来测定光具组基点。
透镜的基点包括焦点、主点和节点等。
通过测量这些基点的位置和方向,可以确定透镜的位置和方向,进而确定整个光学系统的位置和方向。
二、测定方法光具组基点的测定方法主要有两种:直接测量法和间接测量法。
直接测量法是指直接观察和测量光学元件上的基点位置。
例如,对于一个透镜来说,可以直接观察和测量其焦点、主点和节点等的位置。
这种方法虽然简单直观,但精度往往不高,需要借助其他测量工具来实现精确测量。
间接测量法是通过测量光学元件的几何参数来计算基点的位置。
例如,可以通过测量透镜的直径、厚度和边缘轮廓等参数来计算其焦点、主点和节点等的位置。
这种方法虽然较为复杂,但精度较高,适合于高精度测量。
三、数据处理方法在测定光具组基点时,需要将测量的数据进行处理和分析。
下面介绍一些常用的数据处理方法:1.最小二乘法最小二乘法是一种常用的数据处理方法,主要用于拟合一条直线或曲线来描述一组数据之间的关系。
在测定光具组基点时,可以用最小二乘法来拟合一条直线或曲线,以描述基点之间的位置关系。
例如,可以通过最小二乘法来拟合透镜的主轴,从而确定主点的位置。
2.差分法差分法是一种常用的数值计算方法,主要用于计算一组数据的差值。
光具组基点的测定实验报告
竭诚为您提供优质文档/双击可除光具组基点的测定实验报告篇一:光具组基点的测定及数据处理曲靖师范学院物理系实验报告实验题目:光具组基点的测定专业:物理学班级学号:20XX121149姓名:赵旭组别:第三组实验时间:20XX年5月31日【实验目的及要求】1.成像法确定光具组的基点位置,验证高斯公式;2.利用测节器原理,确定透镜组的基点位置;3.进一步了解光学系统基点的性质。
【实验原理】光学仪器中常用的光学系统,一般都是由单透镜或胶合透镜等球面系统共轴构成,对于由薄透镜组合成的共轴球面系统,其物和像的位置可由高斯公式:1s??1s?1f?确定式f?为系统的像方焦距,s?为像距,s为像距。
物距是从第一主面到物的距离,像距是从第二主面到像的距离,系统的像方焦距是从第二主面像方焦点的距离。
各量的符号从各相应主面,沿光线进行方向测量为正,反向为负。
共轴球面系统的物和像的位置,还可由牛顿公式表示:xx??ff??f??f???即式中x为从物方焦点量起的物方焦点到物的距离,x 为从物方焦点量起的像方焦点到像的距离,物方焦距f和像方焦距f?分别是第一、第二主面量到物方焦点的距离,符号规则同上,共轴球面系统的基点、基面具有如下的特点:1.主点和主面若将物体垂直于系统的光轴放置在第一主点h处,则必成一个与物体同样大小的正立像于第二主点h处,即主点是横向放大率?=+1的一对共轭点,过主轴垂直于光轴的平面,分别称为第一、第二主面。
2.节点和节面节点是放大率?=+1的一共轭点,入射光线(或其延长线)通过第一节点n时,出射光线(或其延长线)比通过第二节点n,并与n的入射光线平行,过节点垂直于光轴的平面分别称为第一、第二节面。
当共轴球面系统处于同一媒质时,两主点分别与两节点重合。
?3.焦点和焦面平行于系统主轴的平行光束,经系统折射后与主轴的交点F称为像方焦点;过F垂直于主轴的面称为像方焦面。
第二主点h?到像方焦点F的距离,称系统的像方焦距和焦距f。
实验二 光具组基点的测定
❖ (2)回转轴未通过光具组像方节点,轴OQ在N’ 之后,N’随R端同向移动,入射平行光束中另 一根光线c2正好入射在N上,其出射光线c2’ 由N’发出,保持原方向,落在像屏上P2’处, 与像屏中心P0’相比,P2’随R端做了同向移 动.而轴OQ在N’之左,N’实际上与R端做了 相反的移动,这时落在N上的是光线c3,其出 射光线c3’移向像屏上P3’, P3’与P0’相比做了 与R端相反的移动.总起来讲,会聚点离开(lí kāi)P0’的距离就是N’点离开(lí kāi)正入射时主 轴的距离,见图2—4(b)、(c).
精品资料
❖
(2—3)
❖
(2—4)
❖ 物距p、像距p’分别从H、H’起算,x、x’分别从 F、F’起算,各线段与光线方向相同(xiānɡ tónɡ) 时为正,相反时为负.
精品资料
练习(liànxí)一 用测节器测定光具组的 基点
❖ 测节器原理(yuánlǐ):测节器R是可绕铅直 轴OQ转动的水平V形槽,透镜组Ls可在槽中 左右移动,见图2—2、图2—3.
精品资料
❖ 6.把光具组转180。,测定其物方节点N的 位置.
❖ 7.绘简图表示光具组,在其主轴上标出各 基点位置,算出焦距(jiāojù)f、f’,并与按式(2 一1)、式(2—2)计算的结果作比较,d即两透 镜的距离
精品资料
❖再见(zàijiàn)
精品资料
❖ 目的 ❖ 1.加深对光具组基点的理性认识与感性认识; ❖ 2.学会测定光具组基点与焦距的方法. ❖ 仪器(yíqì)和用具 ❖ 光具座、测节器、光源、物屏、像屏、平面镜、
薄透镜2片、准直透镜.
精品资料
原理(yuánlǐ)
在实验使用的透镜中,有些是不可忽略厚度的;另外(lìnɡ wài),为了纠正像差,光学仪器中常用多个透镜组合成共轴的 透镜组(也称光具组).此时最后成像的位置及像的大小可以利 用作图法逐步求出,也可用单球面及薄透镜成像的高斯公式逐 步计算出,更为简捷的做法是把透镜组等效为一个整体的光学 元件,只要经一次作图或一次计算即可得到最后的像.这样的 光学元件共有六个特征点,分为主点、节点和焦点三种,各有 物方与像方之别,总称为基点.
光具组基点的测定
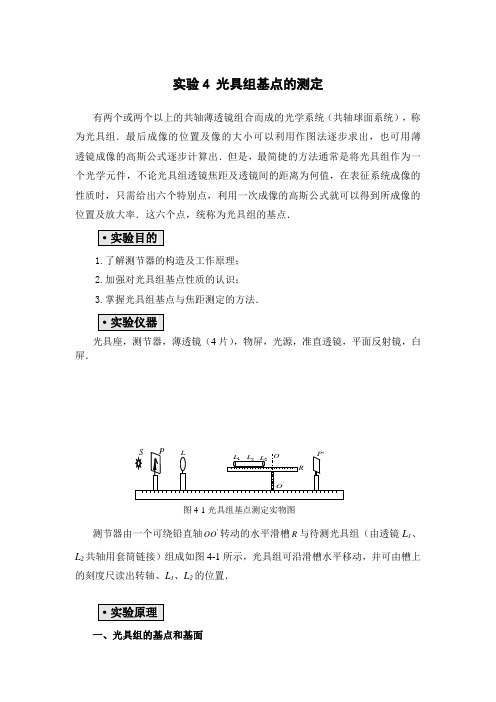
实验4 光具组基点的测定有两个或两个以上的共轴薄透镜组合而成的光学系统(共轴球面系统),称为光具组.最后成像的位置及像的大小可以利用作图法逐步求出,也可用薄透镜成像的高斯公式逐步计算出.但是,最简捷的方法通常是将光具组作为一个光学元件,不论光具组透镜焦距及透镜间的距离为何值,在表征系统成像的性质时,只需给出六个特别点,利用一次成像的高斯公式就可以得到所成像的位置及放大率.这六个点,统称为光具组的基点.1.了解测节器的构造及工作原理;2.加强对光具组基点性质的认识;3.掌握光具组基点与焦距测定的方法.光具座,测节器,薄透镜(4片),物屏,光源,准直透镜,平面反射镜,白屏.测节器由一个可绕铅直轴'OO 转动的水平滑槽R 与待测光具组(由透镜L 1、L 2共轴用套筒链接)组成如图4-1所示,光具组可沿滑槽水平移动,并可由槽上的刻度尺读出转轴、L 1、L 2的位置.一、光具组的基点和基面图4-1光具组基点测定实物图1.主点和主面若将物体垂直于系统的光轴,放置在物方主点H 处,则必成一个与物体同样大小的正立的像于像方主点H'处,即主点是横向放大率β=+1的一对共轭点.过主点垂直于光轴的平面,分别称为物方和像方主面,如图4-2中的MH 和M'H'.2.节点节点是角放大率γ=+1的一对共轭点.入射光线(或其延长线)通过物方节点N 时,出射光光线(或其延长线)必通过像方节点N ',并与N 的入射光线平行(如图4-1).当共轴球面系统处于同一介质中时,两主点分别与两节点重合. 3.焦点、焦面平行于系统主轴的平行光束,经系统折射后与主轴的交点F '称为像方焦点;过F '垂直于主轴的平面称为像方焦面.像方主点H '到像方焦点F '的距离,称为系统的像方焦距f '.此外,还有物方焦点F 及焦面和焦距f .综上所述,薄透镜的两主点与透镜的光心重合,而共轴球面系统两主点的位置,将随各组合透镜或折射面的焦距和系统的空间特性而异.下面以两个薄透镜组合为例进行讨论.设两薄透镜的像方焦距分别为f 1'和f 2',两透镜之间距离为d ,则透镜组的像方焦距f '可由下式求出:()df f f f f -+='2'1'2'1'(4-1) 光具组物方焦距与像方焦距大小相等,两主点位置为:()d f f d f p -+-='2'1'2'()df f d f p -+='2'1'1 (4-2)图4-2 理想光具组成像图p '是第二透镜光心到像方主点的距离,p 是从第一透镜光心到物方主点的距离.可以证明,对于凸透镜组成的光具组,当'2'1f f d +<时,有d p p >'+ (4-3)二、用测节器测定光具组的基点设有一束平行光入射于由两片薄透镜组成的光具组,光具组与平行光束共 轴,光线通过光具组后,会聚于白屏上的Q 点,此Q 点为光具组的像方焦点F '.若以垂直于平行光的某一方向为轴,将光具组转动一小角度,可有如下两种情况: 1.转轴恰好通过光具组的像方节点'N因为入射物方节点N 的光线必从像方节点'N 射出,而且出射光平行于入射光.现在'N 未动,入射角光束方向未变,所以通过光具组的光束,仍然会聚于焦平面上的Q 点,如图4-3(a)所示.但是,这时光具组的像方焦点F '已离开Q 点,严格地讲,旋转后像的清晰度稍差. 2.转轴未通过光具组的像方节点'N由于像方节点'N 未在转轴上,所以光具组转动后,'N 出现移动,但经'N 的出射光仍然平行于入射光,所以由'N 出射的光线和前一情况相比将出现平移,光束的会聚点将从Q 移到'Q ,如图4-3(b)所示.综合上述两种情况来判断光具组节点的位置.一、共轴粗调按图4-4所示,将光源、物屏、准直透镜、光具组、像屏从左至右依次置于)(a )(b 图4-3 转动光具组像位置的变化光具座上,将所有元件靠拢,目测,使所有元件的中心大致在同一条直线上,并与光具座平行.注意,眼睛要与各元件在同一水平线上. 二、用自准直法获取平行光打开光源,将平面镜置于准直透镜与光具组之间,调节透镜的位置,使其出射光为平行光(原理及方法见薄透镜焦距的测定),调好后取下平面镜,物屏与准直透镜的位置均不得移动. 三、光具组基点位置的测定1.取焦距为60mm 和75mm 的两块透镜、长为210mm 的镜筒,组成光具组置于测节器的滑槽上,利用公式(4-1)和(4-2),计算出像方焦距f '(像方主点到像方焦点的距离)和p '(第二透镜光心到像方主点的距离)的理论值,根据理论值摆放仪器的位置,便于调节.2.移动光具组,使其像方透镜的光心与仪器转轴'OO 的距离为p '的理论值,移动像屏得到清晰的像,轻轻少许转动测节器,从像的移动判断N '的位置,逐渐移动光具组S L ,直到微转测节器,像不动为止(像方节点'N 在转轴'OO 上).记录'OO 轴、焦点'F 及透镜2L 光心的位置,重复4次.3.绘图表示光具组像方主点及像方焦点的位置,计算焦距'f 及标准偏差.4.取焦距为-100mm 和75mm 的两块透镜、长为50mm 的镜筒,组成光具组,重复上述步骤.5.取焦距为100mm 和-100mm 的两块透镜、长为50mm 的镜筒,组成光具组,重复上述步骤.1.f 1= 60 mm f 2= 75 mm d = 210 mm p'=210 mm f ' =-60 mm2. f2=75 mm f4=-100 mm d2=50 mm p'=-66.7 mm f ' =100 mm3.f3=100mm f4 =-100mm d2=50mm p'=-100mm f =200mm1.测量前要调共轴;2.每次测量前均需用自准法检查入射光是否为平行光;3.操作小心谨慎,防止光学元件从轨道上掉落.直接扫描式全景相机,也称为节点式全景相机.照相时,镜头绕通过后节点的轴转动或摆动,胶片在一个圆弧的展平板上静止不动并被展平,无速度同步要求,分辨率高.对于节点镜头式相机,相机镜头作为一个整体围绕平面反射镜表面上节点旋转,反射镜位置在镜头后顶点与焦平面之间.同时,平面反射镜以镜头角速度的一半旋转,胶片的运动速率等于焦距与镜头角速率之乘积.三个运动部件必须维持同步.本实验的构思亮点:利用光具组节点的性质——入射光若经物方节点,则出射光必经过像方节点且与入射光平行射出,通过调节测节器的转轴与光具组的相对位置,使光具组的转轴经过像方节点,此时旋转转轴,像不再有侧向移动.这样,将抽象的节点,变得可以测量.操作的难点:旋转测节器判断像是否侧移时,学生可利用放大镜(凸透镜)观察,以减小误差.1.解释用自准法获得平行光的原理.2.主点、节点的含义是什么?它们在什么条件下重合在一起?3.实验中确定节点的依据是什么?如何确定?4.自准法可测出焦点的位置,能测定焦距吗?为什么?5.已知什么量?哪个是待测量?如何控制变量?关注仪器的分度值及单位.按要求处理实验数据,完成实验报告.6.本实验还有哪些操作难点?针对操作难点,摸索并掌握正确的调节的方法.尝试设计测定显微目镜组的基点(实验室提供显微目镜组、测微目镜光具座等),写出实验方案,并完成实验.。
光具组的测定实验报告

一、实验目的1. 了解光具组的基本结构和工作原理;2. 掌握光具组各个部件的功能和调节方法;3. 学会使用光具组进行光学实验,并掌握实验数据的处理方法。
二、实验原理光具组是由多个光学元件组成的系统,用于实现光的聚焦、放大、分光、反射等功能。
本实验主要研究光具组的聚焦和放大功能。
三、实验仪器1. 光具组一套;2. 平面镜;3. 激光光源;4. 光具座;5. 光具夹;6. 测量尺;7. 记录纸。
四、实验步骤1. 将光具组安装于光具座上,确保光具组稳定;2. 调节光具组,使光线从激光光源发出,经过光具组各个元件,最终汇聚于平面镜上;3. 观察平面镜上的光斑,调整光具组,使光斑最小、最亮;4. 记录光具组各个元件的焦距,并计算光具组的总焦距;5. 改变光具组的位置,重复步骤3和4,记录不同位置的光斑大小和光具组的总焦距;6. 利用测量尺测量光具组各个元件的尺寸,计算光具组的放大倍数;7. 分析实验数据,得出结论。
五、实验数据1. 光具组各个元件的焦距:- 焦距1:f1 = 10cm- 焦距2:f2 = 15cm- 焦距3:f3 = 20cm2. 光具组的总焦距:- 总焦距:F = f1 + f2 + f3 = 45cm3. 不同位置的光斑大小:- 位置1:光斑直径 d1 = 2cm- 位置2:光斑直径 d2 = 3cm- 位置3:光斑直径 d3 = 4cm4. 光具组各个元件的尺寸:- 元件1:长度 L1 = 10cm- 元件2:长度 L2 = 15cm- 元件3:长度 L3 = 20cm5. 光具组的放大倍数:- 放大倍数 M = F / d1 = 22.5- 放大倍数 M = F / d2 = 15- 放大倍数 M = F / d3 = 11.25六、实验结果分析1. 通过实验,我们了解到光具组各个元件的功能和调节方法,掌握了光具组的聚焦和放大功能;2. 实验数据表明,光具组的总焦距为45cm,放大倍数在11.25到22.5之间,符合预期;3. 在实验过程中,我们注意到光具组的位置对光斑大小有较大影响,因此在进行光学实验时,要确保光具组的位置合适,以获得最佳实验效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验4 光具组基点的测定
有两个或两个以上的共轴薄透镜组合而成的光学系统(共轴球面系统),称
为光具组.最后成像的位置及像的大小可以利用作图法逐步求出,也可用薄透镜成像的高斯公式逐步计算出.但是,最简捷的方法通常是将光具组作为一个光学元件,不论光具组透镜焦距及透镜间的距离为何值,在表征系统成像的性质时,只需给出六个特别点,利用一次成像的高斯公式就可以得到所成像的位置及放大率.这六个点,统称为光具组的基点.
1.了解测节器的构造及工作原理;
2.加强对光具组基点性质的认识;
3.掌握光具组基点与焦距测定的方法.
光具座,测节器,薄透镜(4片),物屏,光源,准直透镜,平面反射镜,白屏.
测节器由一个可绕铅直轴'OO 转动的水平滑槽R 与待测光具组(由透镜L 1、L 2共轴用套筒链接)组成如图4-1所示,光具组可沿滑槽水平移动,并可由槽上的刻度尺读出转轴、L 1、L 2的位置.
一、光具组的基点和基面
图4-1光具组基点测定实物图
1.主点和主面
若将物体垂直于系统的光轴,放置在物方主点H 处,则必成一个与物体同样大小的正立的像于像方主点H'处,即主点是横向放大率β=+1的一对共轭点.过主点垂直于光轴的平面,分别称为物方和像方主面,如图4-2中的MH 和M'H'.
2.节点
节点是角放大率γ=+1的一对共轭点.入射光线(或其延长线)通过物方节点N 时,出射光光线(或其延长线)必通过像方节点N ',并与N 的入射光线平行(如图4-1).
当共轴球面系统处于同一介质中时,两主点分别与两节点重合. 3.焦点、焦面
平行于系统主轴的平行光束,经系统折射后与主轴的交点F '称为像方焦点;过F '垂直于主轴的平面称为像方焦面.像方主点H '到像方焦点F '的距离,称为系统的像方焦距f '.此外,还有物方焦点F 及焦面和焦距f .
综上所述,薄透镜的两主点与透镜的光心重合,而共轴球面系统两主点的位置,将随各组合透镜或折射面的焦距和系统的空间特性而异.下面以两个薄透镜组合为例进行讨论.
设两薄透镜的像方焦距分别为f 1'和f 2',两透镜之间距离为d ,则透镜组的像方焦距f '可由下式求出:
()
d
f f f f f -+='2'1'
2'1'
(4-1) 光具组物方焦距与像方焦距大小相等,两主点位置为:
()
d f f d f p -+-='2'1'2'
()d
f f d f p -+='2'1'1 (4-2)
图4-2 理想光具组成像图
p '是第二透镜光心到像方主点的距离,p 是从第一透镜光心到物方主点的距
离.可以证明,对于凸透镜组成的光具组,当'2'1f f d +<时,有
d p p >'+ (4-3)
二、用测节器测定光具组的基点
设有一束平行光入射于由两片薄透镜组成的光具组,光具组与平行光束共 轴,光线通过光具组后,会聚于白屏上的Q 点,此Q 点为光具组的像方焦点F '.若以垂直于平行光的某一方向为轴,将光具组转动一小角度,可有如下两种情况: 1.转轴恰好通过光具组的像方节点'N
因为入射物方节点N 的光线必从像方节点'N 射出,而且出射光平行于入射光.现在'N 未动,入射角光束方向未变,所以通过光具组的光束,仍然会聚于焦平面上的Q 点,如图4-3(a)所示.但是,这时光具组的像方焦点F '已离开Q 点,严格地讲,旋转后像的清晰度稍差. 2.转轴未通过光具组的像方节点'N
由于像方节点'N 未在转轴上,所以光具组转动后,'N 出现移动,但经'N 的出射光仍然平行于入射光,所以由'N 出射的光线和前一情况相比将出现平移,光束的会聚点将从Q 移到'Q ,如图4-3(b)所示.
综合上述两种情况来判断光具组节点的位置.
一、共轴粗调
按图4-4所示,将光源、物屏、准直透镜、光具组、像屏从左至右依次置于
)
(a )
(b 图4-3 转动光具组像位置的变化
光具座上,将所有元件靠拢,目测,使所有元件的中心大致在同一条直线上,并与光具座平行.注意,眼睛要与各元件在同一水平线上. 二、用自准直法获取平行光
打开光源,将平面镜置于准直透镜与光具组之间,调节透镜的位置,使其出射光为平行光(原理及方法见薄透镜焦距的测定),调好后取下平面镜,物屏与准直透镜的位置均不得移动. 三、光具组基点位置的测定
1.取焦距为60mm 和75mm 的两块透镜、长为210mm 的镜筒,组成光具组置于测节器的滑槽上,利用公式(4-1)和(4-2),计算出像方焦距f '(像方主点到像方焦点的距离)和p '(第二透镜光心到像方主点的距离)的理论值,根据理论值摆放仪器的位置,便于调节.
2.移动光具组,使其像方透镜的光心与仪器转轴'OO 的距离为p '的理论值,移动像屏得到清晰的像,轻轻少许转动测节器,从像的移动判断N '的位置,逐渐移动光具组S L ,直到微转测节器,像不动为止(像方节点'N 在转轴'OO 上).记录'OO 轴、焦点'F 及透镜2L 光心的位置,重复4次.
3.绘图表示光具组像方主点及像方焦点的位置,计算焦距'f 及标准偏差.
4.取焦距为-100mm 和75mm 的两块透镜、长为50mm 的镜筒,组成光具组,重复上述步骤.
5.取焦距为100mm 和-100mm 的两块透镜、长为50mm 的镜筒,组成光具组,重复上述步骤.
1.f 1= 60 mm f 2= 75 mm d = 210 mm p'=210 mm f ' =-60 mm
2. f2=75 mm f4=-100 mm d2=50 mm p'=-66.7 mm f ' =100 mm
3.f3=100mm f4 =-100mm d2=50mm p'=-100mm f =200mm
1.测量前要调共轴;
2.每次测量前均需用自准法检查入射光是否为平行光;
3.操作小心谨慎,防止光学元件从轨道上掉落.
直接扫描式全景相机,也称为节点式全景相机.照相时,镜头绕通过后节点的轴转动或摆动,胶片在一个圆弧的展平板上静止不动并被展平,无速度同步要求,分辨率高.
对于节点镜头式相机,相机镜头作为一个整体围绕平面反射镜表面上节点旋转,反射镜位置在镜头后顶点与焦平面之间.同时,平面反射镜以镜头角速度的一半旋转,胶片的运动速率等于焦距与镜头角速率之乘积.三个运动部件必须维持同步.
本实验的构思亮点:利用光具组节点的性质——入射光若经物方节点,则出
射光必经过像方节点且与入射光平行射出,通过调节测节器的转轴与光具组的相对位置,使光具组的转轴经过像方节点,此时旋转转轴,像不再有侧向移动.这样,将抽象的节点,变得可以测量.
操作的难点:旋转测节器判断像是否侧移时,学生可利用放大镜(凸透镜)观察,以减小误差.
1.解释用自准法获得平行光的原理.
2.主点、节点的含义是什么?它们在什么条件下重合在一起?
3.实验中确定节点的依据是什么?如何确定?
4.自准法可测出焦点的位置,能测定焦距吗?为什么?
5.已知什么量?哪个是待测量?如何控制变量?关注仪器的分度值及单位.按要求处理实验数据,完成实验报告.
6.本实验还有哪些操作难点?针对操作难点,摸索并掌握正确的调节的方法.
尝试设计测定显微目镜组的基点(实验室提供显微目镜组、测微目镜光具座等),写出实验方案,并完成实验.。