状态空间搜索策略 人工智能
人工智能之状态空间搜索.ppt
§01 Three-S 的基本思想 Ruan Xiaogang Institute of Artificial Intelligence & Robots Beijing University of Technology
1.2 事物的特性
变化的和运动的
事物有事物的特性。 事物既有内在特性又有外在特性,内在特性通 常表现为事物固有的和本质的特征,而外在特性通 常表现为事物与环境的关系。 事物的特性是在不断地变化的,或不断地运动 的,因而,被称为动态特性。 事物特性的变化或运动必定是在一定的时间和 空间中发生的。
(问题原态的描述)
在问题求解活动中,事物的特性代表着问题的性 质,事物特性的变化意味着问题性质的变化。
因此,状态空间中状态的运动,意味着事物特性 的变化,意味着问题性质的变化。重要的是,这种运 动是可以通过对事物进行操作来控制的。
§01 Three-S 的基本思想 Ruan Xiaogang Institute of Artificial Intelligence & Robots Beijing University of Technology
1.4 状态是问题的性质
问题求解过程搜索过程
关于状态空间搜索 (Three-S):
状态 (State):状态空间中的点,代表问题的性质; 问题原态对应的状态称为初始状态,问题终态所对 应的状态称为目标状态。
状态空间 (State Space):所有可能的状态的集合。
状态空间搜索 (Search in State Space): 在状态空间 中搜寻一条由初始状态到目标状态的路径的过程, 即问题求解的过程。
2.1 Three-S 问题的形式化
定义:
状态空间搜索中的问题被定义为一个四元组:
人工智能-搜索是人工智能中的一个基本问题 精品
这32种状态并非全有意义,除去不合法状态和修道士被野人吃
掉的状态,有意义的状态只有16种:
S0=(3, 3, 1) S1=(3, 2, 1) S2=(3, 1, 1) S3=(2, 2, 1) S4=(1, 1, 1) S5=(0, 3, 1) S6=(0, 2, 1) S7=(0, 1, 1) S8=(3, 2, 0) S9=(3, 1, 0) S10=(3, 0, 0) S11=(2, 2, 0) S12=(1, 1,0) S13=(0, 2, 0) S14=(0, 1, 0) S15=(0, 0, 0) 有了这些状态,还需要考虑可进行的操作。
描述方法; 然后从某个初始状态出发,每次使用一个“操作”,
递增地建立起操作序列,直到达到目标状态为止; 此时,由初始状态到目标状态所使用的算符序列就是
该问题的一个解。
5
4.1.2 状态空间法
3. 状态空间的例子(1/11)
例4.1 二阶梵塔问题。设有三根钢针,它们的编号分别是 1号、2号和3号。在初始情况下,1号钢针上穿有A、B两个 金片,A比B小,A位于B的上面。要求把这两个金片全部移 到另一根钢针上,而且规定每次只能移动一个金片,任何时 刻都不能使大的位于小的上面。
8
(1,1)
A(1,2) (2,1) B(1,3) (2,3) A(2,3)
A(1,3)
(3,1) B(1,2) (3,2) A(3,2)
(3,3)
(1,3)
(1,2)
(2,2)
二阶梵塔的状态空间图
从初始节点(1, 1)到目标节点(2, 2)及(3, 3)的任何一条路径都是问题的一 个解。其中,最短的路径长度是3,它由3个操作组成。例如,从 (1, 1)开始, 通过使用操作A(1, 3)、B(1, 2)及A(3, 2),可到达 (3, 3)。
人工智能及其应用-状态空间的盲目搜索
3
3.2.1 状态空间的盲目搜索
广度优先搜索(2/3)
例3.5 八数码难题。在3×3的方格棋盘上,分别放置了表有数字1、 2、3、4、5、6、7、8的八张牌,初始状态S0,目标状态Sg,如下图 所示。可以使用的操作有
空格左移,空格上移,空格右移,空格下移
即只允许把位于空格左、上、右、下方的牌移入空格。要求应用广度 优先搜索策略寻找从初始状态到目标状态的解路径。
23 4 18 765
27
28 14 3 765
283 14 5 76
283 64
1 75
12 3
12 3
8 7
6
4 5
Sg
78 4 65
283 1 64 75
283 16 754
5
3.2.1 状态空间的盲目搜索
深度优先搜索
深度优先搜索算法和广度优先搜索算法的步骤基本相同,它 们之间的主要差别在于Open表中的节点排序不同。在深度优先 搜索算法中,最后进人Open表的节点总是排在最前面,即后生 成的节点先扩展。
个子节点设置指向父节点的指针。按如下公式: g(ni)=g (n) +c (n , ni) i=1,2,...
计算各子结点的代价,并根据各子结点的代价对Open表中的全部结点按由小到大的 顺序排序。然后转第(2)步。
8
3.2.2 代价树的盲目搜索
代价树的代价及广度优先搜索(2/2)
例3.6 城市交通问题。设有5个城市,它们之间的交通线路如左图所示,图中的数 字表示两个城市之间的交通费用,即代价。用代价树的广度优先搜索,求从A市出 发到E市,费用最小的交通路线。
搜索算法 (1)把初始节点S0放入Open表中; (2)如果Open表为空,则问题无解,失败退出; (3)把Open表的第一个节点取出放入Closed表,并记该节点为n; (4)考察n是否为目标节点。若是,则得到问题的解,成功退出; (5)若节点n不可扩展,则转第(2)步; (6)扩展节点n,将其子节点放入Open表的尾部,并为每一个子节
人工智能第7章搜索策略(12-09)

第七章搜索策略搜索是人工智能中的一个基本问题,是推理不可分割的一部分,它直接矢系到智能系统的性能与运行效率,因而尼尔逊把它列入人工智能研究的四个核心问题之一。
第七章搜索策略•7 • "I基本概念・73与/或图的搜索第略♦7」博弈树a索24第七章搜索策略]• 7.1吐木概念・7.2欢态空{11册搜宓览术• 73 I 刀或图的牠索策略X 7.1. 1什么是搜索根据问题的实际情况不断寻找可利用的知识,从而构造一条代价较少的推理路线,从而使问题匮8 满得到解决的过程称为搜索。
,7」.1什么最搜索 ■ 7 |二状念I 间灰小 > 7J-3 U 咸 THJDidJ.«七章授索彙昭3茎本播念搜索分为盲目搜索利启发式搜索°肓仔如(或称非启发式搜索)是按预定的控制策略进 行搜索,在搜索过程中获得的中间信息不用来改进搜索策 略。
启笈式掇转(或称非盲目搜索)是在搜索中加入了与 问题有矢的启发性信息•用以指导搜索朝着最有希望的方 向前进,加速问题的求解过程井且找到最优解。
-7.1.2状态图表示法K 什么是状态图例题7.1设仆二个钱币,氏初始状态为(反、正、反),欲得的 目标状态为(正、正、正)或(反•反、反)。
目标状态问题是允许每次只能且必须H 转一个钱币,连翻三次, 问能否达到目标状态?初始状态/④止®®®®®®®【解】要求解这个问题■可通过引入一个3维变量将问题表示出来。
设3维变量为:其中:qi=O表示正,qjT表示反(iT,2,3)共有八种组合:Qo=( O3O5O) Q1 ={ 0,0,1)□2= (0,150) □3=(0,1,1)€>4=( 1)0,0)八5= (1 >0,1)Q6 = (lJ5O)Q7={1JJ)每个组合就视为一个芳点。
初始状态为Q5,目表状态为Q济Q?810dJ 图可得解有7个,a ah, aha ,haa , hbh, hcc . ebc , ccb其中:“表示a 的变化.b 表示蚯的变化,C 表示Cb 的变化•-7.1.2状态图表不法把这种描述得到的有向图称为状态(空间)图. 其屮的节点代表一种格局(或称为状态)•而两节点之 间的连线表示两节点之间的联系•它可视为某种操作、规 则、变换等。
人工智能第三章_搜索策略-1
搜索什么通常指的就是目标。
❖在哪里搜索
在哪里搜索就是“搜索空间”。搜索空间通常 是指一系列状态的汇集,因此称为状态空间。
和通常的搜索空间不同,人工智能中大多数问题的状 态空间在问题求解之前不是全部知道的。
2020/10/31
6
所以,人工智能中的搜索可以分成两个 阶段:
状态空间的生成阶段 在该状态空间中对所求问题状态的搜索
(1)初始状态集合:定义了初始 的环境。
(2)操作符集合:把一个问题从 一个状态变换为另一个状态的 动作集合。
(3)目标检测函数:用来确定一 个状态是不是目标。
(4)路径费用函数:对每条路径 赋予一定费用的函数。
其中,初 始状态集 合和操作 符集合定 义了问题 的搜索空
间。
2020/10/31
5
➢ 在人工智能中,搜索问题一般包括两个重 要的问题:
分析:通过引入一个三维变量将问题表示出来。设 三维变量为:Q=[q1,q2,q3],式中qi (i=1,2,3)=1表 示钱币为正面,qi (i=1,2,3)=0表示钱币为反面。 则三个钱币可能出现的状态有8种组合: Q0=(0,0,0),Q1=(0,0,1),Q2=(0,1,0),Q3=(0,1,1),Q4= (1,0,0),Q5=(1,0,1), Q6=(1,1,0), Q7=(1,1,1)。 即初始状态为Q5,目标状态为Q0或Q7,要求步数为3。
2020/10/31
21
钱币问题的状态空间图
2020/10/31
22
状态空间搜索
——1.状态空间及其搜索的表示
(2)状态空间表示的经典例子“传教士和野人问题” ★
问题的描述:
N个传教士带领N个野人划船过河; 3个安全约束条件:
状态空间的搜索策略

扩展:用合适算符对一个节点 扩展 : 进行操作,生成一组子节点。 进行操作,生成一组子节点。 存放刚生成的节点。 存放刚生成的节点。 不同搜索策略, 节点在OPEN 不同搜索策略 , 节点在 OPEN 表中的排列顺序不同。 表中的排列顺序不同。
COLSE表 COLSE表 编号 状态节点 父节点 OPEN表 OPEN表 状态节点 父节点
当搜索树不再有末被扩展的端节点时, 表为空, 当搜索树不再有末被扩展的端节点时,即OPEN表为空, 表为空 搜索过程失败,从初始节点达不到目标节点。 搜索过程失败,从初始节点达不到目标节点。一般搜索过程的几点说明
4. 步骤⑥的说明 步骤⑥ 一个节点经一个算符操作通常指生成一个子节点。 一个节点经一个算符操作通常指生成一个子节点。 由于适用于一个节点的算符可能有多个, 由于适用于一个节点的算符可能有多个 , 此时就会 生成一组子节点。 生成一组子节点。 判断子节点是否是当前扩展节点的父节点、 判断子节点是否是当前扩展节点的父节点 、 祖父节 点等,若是,则删除。 点等,若是,则删除。 余下的子节点记做集合M,加入图 中 余下的子节点记做集合 ,加入图G中。 扩展节点时,生成该节点的所有后继节点。 扩展节点时,生成该节点的所有后继节点。
CLOSED: CLOSED:已扩展节点表
存放将扩展或已扩展节点。 存放将扩展或已扩展节点。
一般搜索过程算法流程
建立只含有初始节点S的搜索图G, 放到OPEN表中; 表中; ① 建立只含有初始节点 的搜索图 ,把S放到 放到 表中 建立CLOSED表,其初始值为空表; ② 建立 表 其初始值为空表; 表是空表, ③ 若OPEN表是空表,则失败退出; 表是空表 则失败退出; ④ 选择 选择OPEN表中第一个节点,把它从 表中第一个节点, 表中第一个节点 把它从OPEN表移出并放进 表移出并放进 CLOSED表中,称此节点为节点 ; 表中, 表中 称此节点为节点n; 为目标节点, ⑤ 若n为目标节点,则有解并成功退出,解是追踪图 中沿 为目标节点 则有解并成功退出,解是追踪图G中沿 指针从 到 这条路径得到 指针在第⑦步中设置) 这条路径得到( 指针从n到S这条路径得到(指针在第⑦步中设置); 扩展n,生成不是n的祖先的那些后继节点的集合 的祖先的那些后继节点的集合M, ⑥ 扩展 , 生成不是 的祖先的那些后继节点的集合 , 把 M的这些成员作为 的后继节点添入图 中; 的这些成员作为n的后继节点添入图 的这些成员作为 的后继节点添入图G中
人工智能-实验报告
实验一:知识表示方法一、实验目的状态空间表示法是人工智能领域最基本的知识表示方法之一,也是进一步学习状态空间搜索策略的基础,本实验通过牧师与野人渡河的问题,强化学生对知识表示的了解和应用,为人工智能后续环节的课程奠定基础。
二、问题描述有n个牧师和n个野人准备渡河,但只有一条能容纳c个人的小船,为了防止野人侵犯牧师,要求无论在何处,牧师的人数不得少于野人的人数(除非牧师人数为0),且假定野人与牧师都会划船,试设计一个算法,确定他们能否渡过河去,若能,则给出小船来回次数最少的最佳方案。
三、基本要求输入:牧师人数(即野人人数):n;小船一次最多载人量:c。
输出:若问题无解,则显示Failed,否则,显示Successed输出一组最佳方案。
用三元组(X1, X2, X3)表示渡河过程中的状态。
并用箭头连接相邻状态以表示迁移过程:初始状态->中间状态->目标状态。
例:当输入n=2,c=2时,输出:221->110->211->010->021->000其中:X1表示起始岸上的牧师人数;X2表示起始岸上的野人人数;X3表示小船现在位置(1表示起始岸,0表示目的岸)。
要求:写出算法的设计思想和源程序,并以图形用户界面实现人机交互,进行输入和输出结果,如:Please input n: 2 Please input c: 2Successed or Failed?: SuccessedOptimal Procedure: 221->110->211->010->021->000四、实验组织运行要求本实验采用集中授课形式,每个同学独立完成上述实验要求。
五、实验条件每人一台计算机独立完成实验。
六、实验代码Main.cpp#include<iostream>#include"RiverCrossing.h"using namespace std;//主函数void main(){RiverCrossing::ShowInfo();int n, c;cout<<"Please input n: ";cin>>n;cout<<"Please input c: ";cin>>c;RiverCrossing riverCrossing(n, c);riverCrossing.solve();system("pause");}RiverCrossing.h #pragma once#include<list>//船class Boat{public:static int c;int pastor;//牧师int savage;//野人Boat(int pastor, int savage);};//河岸状态class State{public:static int n;int iPastor;//牧师数量int iSavage;//野人数量int iBoatAtSide;//船所在河岸State *pPrevious;//前一个状态State(int pastor, int savage, int boatAtSide);int getTotalCount();//获得此岸总人数bool check();//检查人数是否符合实际bool isSafe();//检查是否安全State operator + (Boat &boat);State operator - (Boat &boat);bool operator == (State &state);};//过河问题class RiverCrossing{private:std::list<State*> openList, closeList;State endState;bool move(State *nowState, Boat *boat);//进行一次决策State* findInList(std::list<State*> &listToCheck, State &state);//检查某状态节点是否在列表中void print(State *endState);//打印结果public:static void ShowInfo();RiverCrossing(int n, int c);bool solve();//求解问题};RiverCrossing.cpp#include"RiverCrossing.h"#include<iostream>#include<stack>#include<algorithm>using namespace std;//类静态变量定义int State::n = 0;int Boat::c = 0;/*=========================Methods for class "Boat"=========================*/ Boat::Boat(int pastor, int savage){this->pastor = pastor;this->savage = savage;}/*=========================Methods for class "State"=========================*/ //构造函数State::State(int pastor, int savage, int boatAtSide){this->iPastor = pastor;this->iSavage = savage;this->iBoatAtSide = boatAtSide;this->pPrevious = NULL;}//获取此岸总人数int State::getTotalCount(){return iPastor + iSavage;}//检查人数是否在0到n之间bool State::check(){return (iPastor >=0 && iPastor <= n && iSavage >= 0 && iSavage <=n);}//按照规则检查牧师得否安全bool State::isSafe(){//此岸的安全:x1 == 0 || x1 >= x2//彼岸的安全:(n-x1) == 0 || (n-x1) >= (n-x2)//将上述条件联立后得到如下条件return (iPastor == 0 || iPastor == n || iPastor == iSavage);}//重载+符号,表示船开到此岸State State::operator+(Boat &boat){State ret(iPastor + boat.pastor, iSavage + boat.savage, iBoatAtSide + 1);ret.pPrevious = this;return ret;}//重载-符号,表示船从此岸开走State State::operator-(Boat &boat){State ret(iPastor - boat.pastor, iSavage - boat.savage, iBoatAtSide - 1);ret.pPrevious = this;return ret;}//重载==符号,比较两个节点是否是相同的状态bool State::operator==(State &state){return (this->iPastor == state.iPastor && this->iSavage == state.iSavage && this->iBoatAtSide == state.iBoatAtSide);}/*=======================Methods for class "RiverCrossing"=======================*/ //显示信息void RiverCrossing::ShowInfo(){cout<<"************************************************"<<endl;cout<<" 牧师与野人过河问题求解 "<<endl;cout<<" by 1040501211 陈嘉生 "<<endl;cout<<"************************************************"<<endl;}//构造函数RiverCrossing::RiverCrossing(int n, int c):endState(0, 0, 0){State::n = n;Boat::c = c;}//解决问题bool RiverCrossing::solve(){openList.push_back(new State(State::n, State::n, 1));while(!openList.empty()) {//获取一个状态为当前状态State *nowState = openList.front();openList.pop_front();closeList.push_back(nowState);//从当前状态开始决策if (nowState->iBoatAtSide == 1) {//船在此岸//过河的人越多越好,且野人优先int count = nowState->getTotalCount();count = (Boat::c >= count ? count : Boat::c);for (int capticy = count; capticy >= 1; --capticy) {for (int i = 0; i <= capticy; ++i) {Boat boat(i, capticy - i);if (move(nowState, &boat))return true;}}} else if (nowState->iBoatAtSide == 0) {//船在彼岸//把船开回来的人要最少,且牧师优先for (int capticy = 1; capticy <= Boat::c; ++capticy) {for (int i = 0; i <= capticy; ++i) {Boat boat(capticy - i, i);if (move(nowState, &boat))return true;}}}}print(NULL);return false;}//实施一步决策,将得到的新状态添加到列表,返回是否达到目标状态bool RiverCrossing::move(State *nowState, Boat *boat){//获得下一个状态State *destState;if (nowState->iBoatAtSide == 1) {destState = new State(*nowState - *boat);//船离开此岸} else if (nowState->iBoatAtSide == 0) {destState = new State(*nowState + *boat);//船开到此岸}if (destState->check()) {//检查人数if (*destState == endState) {//是否达到目标状态closeList.push_back(destState);print(destState);return true;//找到结果} else if (destState->isSafe()) {//检查是否安全if (!findInList(openList, *destState) && !findInList(closeList,*destState)) {//检查是否在表中//添加没出现过的状态节点到open表openList.push_back(destState);return false;}}}delete destState;return false;}//检查给定状态是否存在于列表中State* RiverCrossing::findInList(list<State*> &listToCheck, State &state){for (list<State*>::iterator ite = listToCheck.begin(); ite != listToCheck.end(); ++ite) {if (**ite == state)return *ite;}return NULL;}//根据达到的目标状态,回溯打印出求解过程void RiverCrossing::print(State *endState){cout<<"================================================"<<endl;if (!endState) {cout<<"Search failed!"<<endl;} else {cout<<"Search successed!"<<endl;cout<<"Optimal Procedure: "<<endl;State *pState = endState;stack<State*> st;//用栈将链表逆序,以便输出while (pState) {st.push(pState);pState = pState->pPrevious;}int count = 0;while (!st.empty()) {pState = st.top();st.pop();cout<<pState->iPastor<<","<<pState->iSavage<<","<<pState->iBoatAtSide;if (st.size() > 0)cout<<" -> ";if (++count % 5 == 0)//每五个步骤换行cout<<endl;}cout<<endl;cout<<"Total move: "<<count - 1<<endl;}cout<<"================================================"<<endl;}七、实验结果实验二:九宫重排一、实验目的A*算法是人工智能领域最重要的启发式搜索算法之一,本实验通过九宫重排问题,强化学生对A*算法的理解与应用,为人工智能后续环节的课程奠定基础。
《人工智能》搜索工艺(建工)
状态空间的搜索策略(状态图搜索) 广度优先搜索, 深度优先搜索, 启发式搜
索
状态空间表示的概念
Original State
例如下棋、迷宫及各种游戏。
三数码难题
对于状态图搜索,已经提出了许多策略,它们大体可 分为盲目搜索( )和启发式搜索( )两大类。
盲目搜索是无向导搜索。 启发式搜索是有向导搜索,即利用启发信息(函数)
引导去寻找问题解。
盲目搜索
盲目搜索又叫做无信息搜索,一般只适 用于求解比较简单的问题。
种类: 宽度优先搜索 深度优先搜索 等代价搜索
将各类形式上不同的搜索问题抽象并统一成为搜索树的 形式,为算法的设计与分析带来巨大的方便。
2831
1
4
765
2 283
14 765
6 83
214 765
7 283 714 65
14
8
3
214
765
15
283
714
6
5
22 83 214 765
23
813
2
4
765
3
2
3
184
765
8 23
1 84 7 65
图搜索策略
一种在图中寻找路径的方法。
宽度优先
深度优先
启发式搜索
宽度优先搜索策略
优先搜索状态空间中离初始状态近的节点(状态
特点:具有完备性, 占用空间
搜索算法
数据结构:
表 : 先进先出队列,存放待扩展的节点.
人工智能第五章

• 操作符(规则) Pij(左右),qij (右左) 左右:p01,p10,p11,p02,p20 条件:船在左岸 右左:q01,q10,q11,q02,q20 条件:船在右岸
❖ 特点: 一种高代价搜索,但若有解存在, 则必能找到它。
16
• 例子 八数码难题(8-puzzle problem)
28 3
1
4
76 5
12 3
8
4
76 5
(初始状态)
(目标状态)
规定:将牌移入空格的顺序为:从空格左边开始
顺时针旋转。不许斜向移动,也不返回先辈节点。
从图可见,要扩展26个节点,共生成46个节点
• 问题的形式化表示:
三元组(I,j,k) I ---C所在钢针号 j ----B所在钢针号 k---A所在钢针号
• 问题: (1,1,1)(3,3,3)
3
9
三阶梵塔问题的与/或树
(111)(333)
(111)(122) (122)(322)
(322)(333)
(111)(113) (113)(123) (123)(122) (322)(321) (321)(331) (331)(333)
A
A
B
C
D
与图
B
C
或图
2、变换:大问题变成若干个易解子问题,只要有一个 子问题解决了,大问题也就解决了。
第五章 状态空间的搜索策略

状态空间图的搜索策略
节点类型说明
状态空间图的搜索策略
修改指针的说明
状态空间图的搜索策略
状态空间图的搜索策略
状态空间图的搜索策略
宽度优先搜索策略
宽度优先
又称为是广度优先; 是一种盲目的搜索策略。
它的基本思想是:
从初始节点开始,逐层对节点进行依次扩展,并考 察它是否为目标节点。在对下层的节点进行扩展或 者是搜索之前,必须完成对当前层的所有节点的扩 展或者是搜索。
搜索方法的实现——递归实现 递归方法的特点
递归必须要有出口 递归公式中,每一次调用必须距出口更近一 些
回溯搜索
回溯搜索
算法步骤Backtrack(DATA)
①如果当前状态DATA为目标状态,则找到目 标。 ②该状态不合法,则过程返回失败信息 ,必须 回溯。 ③计算DATA(当前状态)的可应用规则集, 依某种原则(任意排列或按启发式准则)排列 后赋给RULES。 ④如果规则用完未找到目标,过程返回FAIL, 必须回溯。
回溯搜索
回溯搜索会出现的问题
深度问题 死循环问题
回溯搜索
回溯中失败原因的分析——多步回溯问 题 回溯搜索中知识的应用
盲目搜索策略
状态空间图的搜索策略 宽度优先搜索策略 深度优先搜索策略 代价树的宽度优先搜索 代价树的深度优先搜索 盲目搜索的性质总结
状态空间图的搜索策略
启发式搜索
人工智能领域中已有搜索方法
(1)求任一解路的搜索策略
回溯法(Backtracking) 爬山法(Hill Climbing) 宽度优先法(Breadth-first) 深度优先法(Depth-first) 限定范围搜索法(Beam Search) 好的优先法(Best-first)
人工智能搜索算法
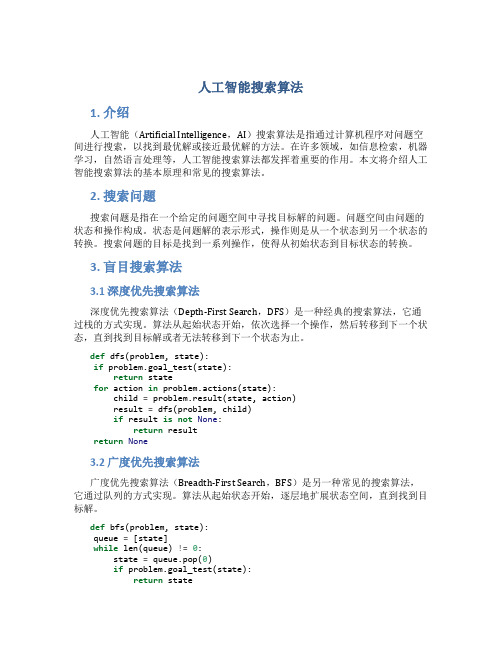
人工智能搜索算法1. 介绍人工智能(Artificial Intelligence,AI)搜索算法是指通过计算机程序对问题空间进行搜索,以找到最优解或接近最优解的方法。
在许多领域,如信息检索,机器学习,自然语言处理等,人工智能搜索算法都发挥着重要的作用。
本文将介绍人工智能搜索算法的基本原理和常见的搜索算法。
2. 搜索问题搜索问题是指在一个给定的问题空间中寻找目标解的问题。
问题空间由问题的状态和操作构成。
状态是问题解的表示形式,操作则是从一个状态到另一个状态的转换。
搜索问题的目标是找到一系列操作,使得从初始状态到目标状态的转换。
3. 盲目搜索算法3.1 深度优先搜索算法深度优先搜索算法(Depth-First Search,DFS)是一种经典的搜索算法,它通过栈的方式实现。
算法从起始状态开始,依次选择一个操作,然后转移到下一个状态,直到找到目标解或者无法转移到下一个状态为止。
def dfs(problem, state):if problem.goal_test(state):return statefor action in problem.actions(state):child = problem.result(state, action)result = dfs(problem, child)if result is not None:return resultreturn None3.2 广度优先搜索算法广度优先搜索算法(Breadth-First Search,BFS)是另一种常见的搜索算法,它通过队列的方式实现。
算法从起始状态开始,逐层地扩展状态空间,直到找到目标解。
def bfs(problem, state):queue = [state]while len(queue) !=0:state = queue.pop(0)if problem.goal_test(state):return statefor action in problem.actions(state):child = problem.result(state, action)queue.append(child)return None4. 启发式搜索算法4.1 A*算法A算法是一种常用的启发式搜索算法,它通过估计从当前状态到目标状态的代价来选择下一步操作。
人工智能教程习题及答案第5章习题参考解答
第五章搜索策略习题参考解答5.1 练习题5.1 什么是搜索?有哪两大类不同的搜索方法?两者的区别是什么?5.2 用状态空间法表示问题时,什么是问题的解?求解过程的本质是什么?什么是最优解?最优解唯一吗?5.3 请写出状态空间图的一般搜索过程。
在搜索过程中OPEN表和CLOSE表的作用分别是什么?有何区别?5.4 什么是盲目搜索?主要有几种盲目搜索策略?5.5 宽度优先搜索与深度优先搜索有何不同?在何种情况下,宽度优先搜索优于深度优先搜索?在何种情况下,深度优先搜索优于宽度优先搜索?5.6 用深度优先搜索和宽度优先搜索分别求图5.10所示的迷宫出路。
图5.10 习题5.6的图5.7 修道士和野人问题。
设有3个修道士和3个野人来到河边,打算用一条船从河的左岸渡到河的右岸去。
但该船每次只能装载两个人,在任何岸边野人的数目都不得超过修道士的人数,否则修道士就会被野人吃掉。
假设野人服从任何一种过河安排,请使用状态空间搜索法,规划一使全部6人安全过河的方案。
(提示:应用状态空间表示和搜索方法时,可用(N m,N c)来表示状态描述,其中N m和N c分别为传教士和野人的人数。
初始状态为(3,3),而可能的中间状态为(0,1),(0,2),(0,3), (1,1),(2,1),(2,2),(3,0),(3,1),(3,2)等。
)5.8 用状态空间搜索法求解农夫、狐狸、鸡、小米问题。
农夫、狐狸、鸡、小米都在一条河的左岸,现在要把它们全部送到右岸去。
农夫有一条船,过河时,除农夫外,船上至多能载狐狸、鸡和小米中的一样。
狐狸要吃鸡,鸡要吃小米,除非农夫在那里。
试规划出一个确保全部安全的过河计划。
(提示:a.用四元组(农夫,狐狸,鸡,米)表示状态,其中每个元素都可为0或1,0表示在左岸,1表示在右岸;b.把每次过河的一种安排作为一个算符,每次过河都必须有农夫,因为只有他可以划船。
)5.9 设有三个大小不等的圆盘A 、B 、C 套在一根轴上,每个圆盘上都标有数字1、2、3、4,并且每个圆盘都可以独立地绕轴做逆时针转动,每次转动90°,初始状态S 0和目标状态S g 如图5.11所示,用宽度优先搜索法和深度优先搜索法求从S 0到S g 的路径。
人工智能导论-第5章 搜索求解策略

4
第5章 搜索求解策略
5.1 搜索的概念 5.2 状态空间的搜索策略 5.3 盲目的图搜索策略 5.4 启发式图搜索策略
5
节点, 深度相等的节点按生成次序的盲目搜索。
特点:扩展最深的节点的结果使得搜索沿着状态空间某条
单一的路径从起始节点向下进行下去;仅当搜索到达一个没 有后裔的状态时,才考虑另一条替代的路径。
2023/12/14
Char 5. pp.34
5.3.3 深度优先搜索策略
算法:
防止搜索过程沿着无益的 路径扩展下去,往往给出一 个节点扩展的最大深度—— 深度界限; 与宽度优先搜索算法最根 本的不同:将扩展的后继节 点放在OPEN表的前端。 深度优先搜索算法的OPEN 表后进先出。
O :操作算子的集合。
S 0:包含问题的初始状态是 S 的非空子集。
G :若干具体状态或满足某些性质的路径信息描述。
15
5.2.1 状态空间表示法
求解路径:从 S 0 结点到 G 结点的路径。
状态空间解:一个有限的操作算子序列。
S0 O1 S1 O2 S 2 O3 Ok G O1,, Ok :状态空间的一个解。
Q [q1, q2 ,, qn ]T
操作:表示引起状态变化的过程型知识的一组关 系或函数:
F { f1, f 2 ,, f m}
14
5.2.1 状态空间表示法
状态空间:利用状态变量和操作符号,表示系统或 问题的有关知识的符号体系,状态空间是一个四元 组:
(S , O, S0 , G)
人工智能导论

与/或树深度优先搜索
将扩展节点的子节点放在Open表的首部。 子节点中是否有终止节点?若有,执行 可解标记过程;若根节点标记为可解, 结束;否则,删去Open表中的可解节点。 对不可扩展节点,执行不可解标记过程; 若根节点标记为不可解,结束;否则, 删去Open表中的不可解节点。 例4-12解或等价变换为一
系列较简单的问题予以处理。 问题的分解:如果一个问题P可以归约为一组 子问题P1、 P2、…、 Pn,并且只有当所有子问 题Pi(i=1、2、 …、n)都有解时原问题P才有解, 则称子问题P1、 P2、…、 Pn是问题P的分解。 逻辑关系是P= P1∧ P2∧ …∧ Pn
P
…
P1 P2 Pn
本原问题:可直接给出答案的问题。 在解决实际问题时,问题的分解和等价变换可
能被同时使用。
与/或树
P
P2
P1
P3
P21
P22
端节点:没有子节点的节点。 终止节点:若端节点对应的问题可以解决,就称 该端节点为终止节点。 可解节点:终止节点;“或”节点的子节点中有 一个可解;“与”节点的所有子节点可解。 不可解节点:非终止节点;“或”节点的所有子 节点不可解;“与”节点的子节点中有一个不 可解。 解树:导致根节点可解的子树。
P
t t
t
解树
P
t t
t
问题归约求解过程就是生成解树的过程。 例4-4
4-2 状态空间的盲目搜索
由于问题的状态空间可用一个有向图表示,因
此,状态空间搜索就是对有向图的搜索。 基本思想(p.109):节点扩展和检查
4-2-1一般图搜索过程
一般图搜索过程
S0:问题的初始状态。 G:搜索过程所得到的搜索图。 M:当前扩展节点新生成的且不为自己先辈的 子节点集 Open表(未扩展节点表):存放刚生成节点。 Closed表(已扩展节点表):存放已经扩展或 将要扩展的节点。
人工智能第五章 问题求解的基本原理

例如,把问题P分解为三个子问题P1,P2,P3, 可用图表示。如图:P1,P2,P3是问题P的三个 子问题,只有当这三个子问题都可解时,问题P才 可解,称P1,P2,P3之间存在“与”关系;称节 点P为“与”节点;由P,P1,P2,P3所构成的图 称为“与”树。在图中,为了标明某个节点是 “与”节点,通常用一条弧把各条边连接起来。
2 、等价变换:对于一个复杂问题,除了 可用“分解”方法进行求解外,还可利用 同构或同态的等价变换,把它变换为若干 个较容易求解的新问题。若新问题中有一 个可求解,则就得到了原问题的解。问题 的等价变换过程,也可用一个图表示出来, 称为“或”树。
例如,问题 P 被等价变换为新问题 P1, P2, P3。如
搜索的一般过程如下: ①把初始节点S0放入OPEN表,并建立目前只包含 S0的图,记为G。②检查OPEN表是否为空,若为 空则问题无解,退出。③把OPEN表的第一个节点 取出放入CLOSED表,并记该节点为节点 n。④考 察节点n是否为目标节点。若是,则求得了问题的 解,退出。⑤扩展节点n,生成一组子节点。把其 中不是节点 n先辈的那些子节点记作集合 M,并把 这些子节点作为节点n的子节点加入G中。
该过程与广度优先搜索的唯一区别是:广度优先搜 索是将节点n的子节点放入到OPEN表的尾部,而深度优 先搜索是把节点n的子节点放入到OPEN表的首部。
2、其搜索过程如下:
①把初始节点S0放入OPEN表。②如果OPEN表为空, 则问题无解,退出。③把OPEN表的第一个节点(记为节 点n)取出放入CLOSED表。④考察节点n是否为目标节点。 若是,则求得了问题的解,退出。⑤若节点 n不可扩展, 则转第②步。⑥扩展节点n,将其子节点放入到OPEN表 的首部,并为其配臵指向父节点的指针,然后转第②步。
人工智能搜索策略部分参考答案

搜索策略部分参考答案1 有一农夫带一条狼,一只羊和一框青菜与从河的左岸乘船倒右岸,但受到下列条件的限制:(1) 船太小,农夫每次只能带一样东西过河;(2)如果没有农夫看管,则狼要吃羊,羊要吃菜。
请设计一个过河方案,使得农夫、浪、羊都能不受损失的过河,画出相应的状态空间图。
题示:(1) 用四元组(农夫,狼,羊,菜)表示状态,其中每个元素都为0或1,用0表示在左岸,用1表示在右岸。
(2) 把每次过河的一种安排作为一种操作,每次过河都必须有农夫,因为只有他可以划船。
解:第一步,定义问题的描述形式用四元组S=(f,w,s,v)表示问题状态,其中,f,w,s和v分别表示农夫,狼,羊和青菜是否在左岸,它们都可以取1或0,取1表示在左岸,取0表示在右岸。
第二步,用所定义的问题状态表示方式,把所有可能的问题状态表示出来,包括问题的初始状态和目标状态。
由于状态变量有4个,每个状态变量都有2种取值,因此有以下16种可能的状态:S0=(1,1,1,1),S1=(1,1,1,0),S2=(1,1,0,1),S3=(1,1,0,0)S4=(1,0,1,1),S5=(1,0,1,0),S6=(1,0,0,1),S7=(1,0,0,0)S8=(0,1,1,1),S9=(0,1,1,0),S10=(0,1,0,1),S11=(0,1,0,0)S12=(0,0,1,1),S13=(0,0,1,0),S14=(0,0,0,1),S15=(0,0,0,0)其中,状态S3,S6,S7,S8,S9,S12是不合法状态,S0和S15分别是初始状态和目标状态。
第三步,定义操作,即用于状态变换的算符组F由于每次过河船上都必须有农夫,且除农夫外船上只能载狼,羊和菜中的一种,故算符定义如下:L(i)表示农夫从左岸将第i样东西送到右岸(i=1表示狼,i=2表示羊,i=3表示菜,i=0表示船上除农夫外不载任何东西)。
由于农夫必须在船上,故对农夫的表示省略。