旋转矩阵公式法
旋转矩阵

三维旋转矩阵三维旋转特性给定单位向量u和旋转角度φ,则R(φ,u)表示绕单位向量u旋转φ角度。
R(0,u)表示旋转零度。
R(φ,u)= R(−φ,−u)。
R(π+φ,u)= R(π−φ,−u)。
如果φ=0,则u为任意值。
如果0<φ<π,则u唯一确定。
如果φ= π,则符号不是很重要。
因为- π和π是一致的,结果相同,动作不同。
由旋转矩阵求旋转角和旋转轴每一个三维旋转都能有旋转轴和旋转角唯一确定,好多方法都可以从旋转矩阵求出旋转轴和旋转角,下面简单介绍用特征值和特征向量确定旋转轴和旋转角的方法。
将旋转矩阵作用在旋转轴上,则旋转轴还是原来的旋转轴,公式表示如下:Ru=u转化得:Ru=Iu =>(R−I)u=0可以确定的是u在R-I的零空间中,角度可有下面的公式求得,Tr表示矩阵的迹:Tr(R)=1+2cosθ从旋转轴和旋转角求旋转矩阵假设给定单位向量u=(ux,uy,u z)T,并且u为单位向量即:u x2+u y2+u z2=1,给定绕u旋转的角度θ,可以得出旋转矩阵R:R=[cosθ+u x2(1−cosθ)u x u y(1−cosθ)−u z sinθu x u z(1−cosθ)+u y sinθu y u x(1−cosθ)+u z sinθcosθ+u y2(1−cosθ)u y u z(1−cosθ)−u x sinθu z u x(1−cosθ)−u y sinθu z u y(1−cosθ)+u x sinθcosθ+u z2(1−cosθ)]上面的公式等价于:R=cosθI+sinθ[u]×+(1−cosθ)u⊗u其中[u]×是单位向量u的叉乘矩阵,⊗表示张量积,I是单位向量. 这是罗德里格斯旋转方程的矩阵表示。
下面给出叉乘和张量积的公式:u⊗u=[u x2u x u y u x u zu x u y u y2u y u z u x u z u y u z u z2][u]×=[0−u z u y u z0−u x −u y u x0]面向旋转轴,逆时针旋转为正方向,此时旋转矩阵的行列式为1,反之为反方向,旋转矩阵的行列式为-1。
旋转矩阵公式

旋转矩阵是一种用于描述平面或三维空间中物体旋转的数学工具,常用的旋转矩阵公式如下:
二维旋转矩阵(二维平面):
设点P(x, y)绕原点逆时针旋转θ角度后得到点P'(x', y'),则旋转矩阵表示为:
x' = x * cos(θ) - y * sin(θ)
y' = x * sin(θ) + y * cos(θ)
三维绕X轴旋转矩阵:
设点P(x, y, z)绕X轴逆时针旋转θ角度后得到点P'(x', y', z'),则旋转矩阵表示为:
x' = x
y' = y * cos(θ) - z * sin(θ)
z' = y * sin(θ) + z * cos(θ)
三维绕Y轴旋转矩阵:
设点P(x, y, z)绕Y轴逆时针旋转θ角度后得到点P'(x', y', z'),则旋转矩阵表示为:
x' = x * cos(θ) + z * sin(θ)
y' = y
z' = -x * sin(θ) + z * cos(θ)
三维绕Z轴旋转矩阵:
设点P(x, y, z)绕Z轴逆时针旋转θ角度后得到点P'(x', y', z'),则旋转矩阵表示为:
x' = x * cos(θ) - y * sin(θ)
y' = x * sin(θ) + y * cos(θ)
z' = z
这些公式描述了在二维平面和三维空间中绕不同轴进行旋转的变化规律。
具体应用时,根据需要进行相应的数值替换,即可得到具体的旋转结果。
欧拉角与旋转矩阵的转换方法

欧拉角与旋转矩阵的转换方法欧拉角(Euler angles)和旋转矩阵(rotation matrix)是描述物体在三维空间中旋转的常用数学工具。
欧拉角由三个旋转轴和三个旋转角度组成,而旋转矩阵是一个3x3的正交矩阵。
这两种表示方法之间的转换方法可以分为两个步骤:将欧拉角转换为旋转矩阵,或将旋转矩阵转换为欧拉角。
一、欧拉角转换为旋转矩阵欧拉角的转换公式有多种实现方式,其中最为常用的是Z-Y-X欧拉角序列的转换公式。
假设欧拉角序列为ψ、θ、φ(分别表示绕Z轴、Y轴和X轴的旋转角度),则对应的旋转矩阵R可以通过以下的步骤来计算:1.将ψ、θ、φ分别转换为对应的旋转矩阵Rz(ψ)、Ry(θ)和Rx(φ),这里Rz、Ry和Rx分别表示绕Z轴、Y轴和X轴的旋转矩阵。
2.将Rz(ψ)、Ry(θ)和Rx(φ)按照Z-Y-X的次序相乘,得到最终的旋转矩阵R=Rz(ψ)Ry(θ)Rx(φ)。
具体地,Rz(ψ)、Ry(θ)和Rx(φ)的计算公式如下:Rz(ψ) = [[cos(ψ), -sin(ψ), 0], [sin(ψ), cos(ψ), 0], [0, 0, 1]]Ry(θ) = [[cos(θ), 0, sin(θ)], [0, 1, 0], [-sin(θ), 0, cos(θ)]]Rx(φ) = [[1, 0, 0], [0, cos(φ), -sin(φ)], [0, sin(φ), cos(φ)]]将以上的计算公式代入到步骤2中,就可以得到欧拉角对应的旋转矩阵R。
二、旋转矩阵转换为欧拉角将旋转矩阵转换为欧拉角的过程比较复杂,通常需要分解出旋转矩阵的三个旋转角度。
下面介绍一种常用的分解方法,即将旋转矩阵分解为绕Z轴、Y轴和X轴旋转的角度。
假设旋转矩阵为R,则分解的步骤如下:1.计算R矩阵第三列的单位向量v32. 计算v3在xz平面上的投影v3_projected,即将v3的y分量设为0。
3. 计算v3与单位向量z的夹角θ1、可以使用反余弦函数计算cos(θ1) = v3_projected · z,其中·表示向量的点积。
旋转矩阵计算

旋转矩阵计算**旋转矩阵计算**在计算机图形学和计算几何学中,旋转矩阵是一种常用的数学工具,用于描述物体在二维或三维空间内的旋转运动。
通过旋转矩阵,我们可以精确地描述物体如何绕着某个中心点进行旋转,并可以实现旋转变换的运算。
本文将详细介绍旋转矩阵的原理、应用、以及如何进行旋转矩阵计算。
### 一、旋转矩阵的原理旋转矩阵是一个二维或三维的方阵,可以用来描述一个向量或坐标点绕着原点或其他中心点进行旋转的变换。
在二维空间中,一个二维向量 $(x, y)$ 绕着原点逆时针旋转一个角度 $\theta$,可以通过以下的矩阵形式进行表示:$$\begin{bmatrix}x' \\y'\end{bmatrix} =\begin{bmatrix}\cos(\theta) & -\sin(\theta) \\\sin(\theta) & \cos(\theta)\end{bmatrix}\begin{bmatrix}x \\y\end{bmatrix}$$其中,$(x', y')$ 是旋转后的坐标,$(x, y)$ 是旋转前的坐标。
$\theta$ 是旋转的角度,$\cos(\theta)$ 和 $\sin(\theta)$ 分别表示角度 $\theta$ 的余弦值和正弦值。
### 二、旋转矩阵的应用旋转矩阵广泛应用于计算机图形学、计算机视觉、机器人学、物理仿真等领域。
在计算机图形学中,旋转矩阵通常用于实现三维模型的旋转、平移、缩放等操作,使得物体能够在屏幕上进行动态的显示。
在计算机视觉中,旋转矩阵可以用于图像处理中的旋转、仿射变换等操作,从而实现图像的处理和分析。
在机器人学中,旋转矩阵可以描述机器人末端执行器的姿态变换,实现机器人的运动规划和控制。
在物理仿真中,旋转矩阵可以描述刚体在三维空间内的旋转运动,模拟真实物体的运动轨迹和动态行为。
### 三、旋转矩阵的计算方法旋转矩阵的计算方法主要包括以下几种:1. **通过旋转角度计算旋转矩阵**:根据旋转角度的不同,可以通过余弦和正弦值计算旋转矩阵的各个元素,从而得到具体的旋转矩阵。
计算旋转矩阵

计算旋转矩阵旋转矩阵是一种常见的数学变换,它允许我们旋转一个几何图形,而不会更改其形状。
旋转矩阵也可以被用来改变坐标系的特定方向,比如在把笛卡尔坐标系改变为极坐标系,或者相反。
要计算旋转矩阵,我们首先必须了解旋转角度和旋转向量。
旋转角度是指旋转几何图形或坐标轴时所需要的角度。
旋转向量在旋转过程中提供方向,可以理解为旋转面的法向量。
旋转矩阵是一个3x3的方阵,可以用来表示旋转变换。
它可以用关于旋转向量u和旋转角度θ的表达式来构造。
旋转矩阵的构造方式如下:R(u,θ) = cosθ I + (1-cosθ)uuT + sinθ[u]×其中,[u]×是旋转向量的叉乘矩阵。
旋转矩阵的构造需要知道旋转角度和旋转向量。
为计算旋转矩阵,第一步可以用下述公式计算旋转角度θ:tanθ=u×v/|u||v|其中,u和v分别为原始向量和新向量。
旋转矩阵也可以用矩阵操作来构造,它可以用余弦、正弦和叉乘算子构造出来。
它是一个3x3的方阵,可以表示任意旋转对三维空间中的任何一点的影响。
另外,旋转矩阵也可以用欧拉角表示:R(α,β,γ)=cosαcosγsinαsinβcosγsinαcosβsinγcosαsinγ+sinαsinβsinγ+sinαcosβcosγsinαcosβ+cosαsinβcosγcosαsinβsinγsinαsinβ+cosαcosβcosγ+cosαcosβsinγ其中,α、β、γ分别为欧拉角的三个轴方向角。
要计算旋转矩阵,我们需要明确旋转角度和旋转向量,以及对象的原始坐标和新坐标位置,并按照上述方法计算旋转矩阵。
旋转矩阵可以用来改变坐标系的方向,可以用来旋转几何图形,也可以用来改变三维空间中的任意一点的坐标位置,从而实现更好的空间变换。
旋转矩阵和四元数

旋转矩阵和四元数旋转矩阵和四元数是描述三维空间中旋转的两种常见方法。
旋转矩阵使用一个3x3的矩阵来表示旋转,而四元数则是一个四元组。
虽然这两种方法在数学上等价,但它们在计算机图形学中的应用场景不同,因此有各自的优缺点。
旋转矩阵是最常见的旋转表示方式之一。
旋转矩阵是一个正交矩阵(orthogonal matrix),它保持向量的长度不变,并且保持向量间的夹角不变。
对于三维空间中的旋转,旋转矩阵由三个互相垂直的单位向量组成。
这三个向量描述了三个轴上的旋转:x轴、y轴、z轴,每个轴上的旋转由一个角度表示。
例如,以下是绕x轴旋转45度的旋转矩阵:{1, 0, 0,0, cosθ, -sinθ,0, sinθ, cosθ}其中,θ表示旋转的角度,cosθ和sinθ表示角度θ的余弦和正弦。
类似地,绕y 轴或z轴旋转也可以得到对应的旋转矩阵。
旋转矩阵可以直接用于对三维模型进行变换。
假设我们有一个三维向量v,它的x、y、z分别表示其在三个轴上的位置。
我们将它与旋转矩阵R相乘,得到新的向量v',它表示将v绕R所描述的轴旋转后的新位置。
这个过程可以用以下公式表示:v' = R * v其中*表示矩阵乘法。
该公式的意义是将v先保持长度不变地旋转至与R所描述的轴重合,然后再按R所描述的角度进行旋转,最终得到一个新的向量v'。
然而,旋转矩阵有一个问题:当连续执行多次旋转时,误差会逐渐积累,导致精度下降。
此时,可以使用四元数来避免这个问题。
四元数是一个四元组,通常用(qw, qx, qy, qz)来表示。
其中qw是实部,qx、qy、qz 是虚部,因此四元数可以写成以下形式:q = qw + qx i + qy j + qz k其中i、j、k是三个虚数单位,它们满足以下关系:i^2 = j^2 = k^2 = ijk = -1四元数可以用来描述三维空间中的旋转。
具体地,一个表示绕轴(n, θ)旋转的四元数可以表示为:q = cos(θ/2) + n * sin(θ/2)其中n是一个单位向量,表示旋转轴的方向,θ是旋转的角度。
(完整word版)旋转矩阵公式法
旋转矩阵公式法!一,选11个号,中了5个号,100%能组合到 4 个号。
假设你选了01、02、03、04、05、06、07、08、09、10、11,则可以组合成以下22 注,需投入44 元:1)01、05、07、09、112)01、05、06、08、103)01、04、06、08、094)01、04、05、07、105)01、03、07、08、116)01、03、04、09、107)01、02、06、10、118)01、02、04、08、119)01、02、03、06、0710)01、02、03、05、0911)02、07、08、09、1012)02、05、06、07、0813)02、04、07、09、1114)02、04、05、06、0915)02、03、05、10、1116)02、03、04、08、1017)03、06、08、09、1118)03、06、07、09、1019)03、04、05、07、0820)03、04、05、06、1121)04、06、07、10、1122)05、08、09、10、11二,选11个号,中了4 个号,100%能组合到 4 个号。
假设你选了01、02、03、04、05、06、07、08、09、10、11,则可以组合成以下66 注,只要132 元就能搞定:1)01、07、08、09、102)01、06、07、09、113)01、05、08、09、114)01、05、07、10、115)01、05、06、08、106)01、04、09、10、117)01、04、06、08、118)01、04、06、07、109)01、04、05、07、0810)01、04、05、06、0911)01、03、08、10、1112)01、03、06、09、1013)01、03、06、07、0814)01、03、05、07、0915)01、03、05、06、1116)01、03、04、08、0917)01、03、04、07、1118)01、03、04、05、1019)01、02、07、08、1120)01、02、06、10、1121)01、02、06、08、0922)01、02、05、09、1023)01、02、05、06、0724)01、02、04、08、1025)01、02、04、07、0926)01、02、04、05、1127)01、02、03、09、1128)01、02、03、07、1029)01、02、03、05、0830)01、02、03、04、0631)02、08、09、10、1132)02、06、07、09、1033)02、05、07、09、1134)02、05、07、08、1035)02、05、06、08、1136)02、04、07、10、1137)02、04、06、09、1138)02、04、06、07、0839)02、04、05、08、0940)02、04、05、06、1041)02、03、07、08、0942)02、03、06、08、1043)02、03、06、07、1144)02、03、05、10、1145)02、03、05、06、0946)02、03、04、09、1047)02、03、04、08、1148)02、03、04、05、0749)03、07、09、10、1150)03、06、08、09、1151)03、05、08、09、1052)03、05、07、08、1153)03、05、06、07、1054)03、04、07、08、1055)03、04、06、10、1156)03、04、06、07、0957)03、04、05、09、1158)03、04、05、06、0859)04、07、08、09、1160)04、06、08、09、1061)04、05、08、10、1162)04、05、07、09、1063) 04、 05、 06、 07、 11 64) 05、 06、 09、 10、 11 65) 05、06、 07、 08、 0966) 06、 07、 08、 10、 11 三,选 11 个号,以每注 6个号的小复式进行组合,中了5 个号, 100%能组合到 5个号。
三维旋转矩阵公式
三维旋转矩阵公式在数学和计算机图形学中,三维旋转矩阵是一种用来描述在三维空间中进行旋转操作的数学工具。
通过旋转矩阵,我们可以方便地对三维物体进行旋转,从而实现各种视觉效果和动画效果。
三维旋转矩阵的表示通常是一个3x3的矩阵,其中包含了关于旋转的所有信息。
在三维空间中,我们通常使用三个轴来描述旋转,分别是x轴、y轴和z轴。
对应地,我们可以构造三个旋转矩阵,分别是绕x轴旋转的矩阵、绕y轴旋转的矩阵和绕z轴旋转的矩阵。
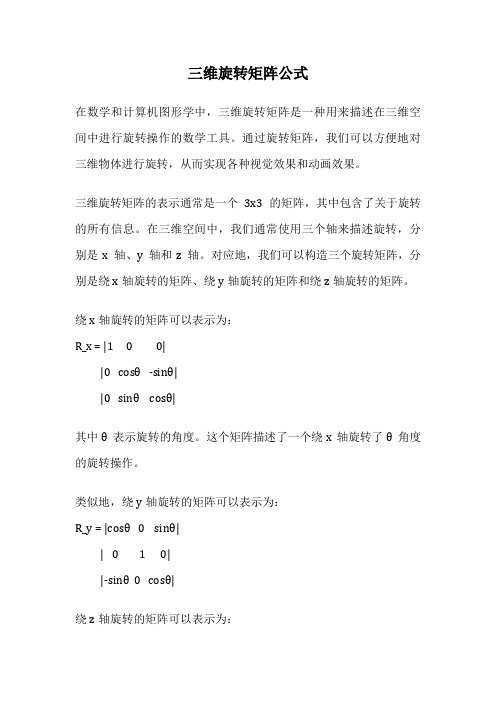
绕x轴旋转的矩阵可以表示为:R_x = |1 0 0||0 cosθ -sinθ||0 sinθ cosθ|其中θ表示旋转的角度。
这个矩阵描述了一个绕x轴旋转了θ角度的旋转操作。
类似地,绕y轴旋转的矩阵可以表示为:R_y = |cosθ 0 sinθ|| 0 1 0||-sinθ 0 cosθ|绕z轴旋转的矩阵可以表示为:R_z = |cosθ -sinθ 0||sinθ cosθ 0|| 0 0 1|这三个矩阵分别描述了绕不同轴旋转的操作,通过它们可以实现任意三维空间中的旋转。
同时,这些矩阵也可以组合使用,实现复杂的旋转效果,比如先绕x轴旋转,再绕y轴旋转,最后绕z轴旋转。
除了绕轴旋转的矩阵之外,还有其他表示旋转的方法,比如四元数。
四元数是一种更为复杂的数学工具,可以描述旋转、缩放和平移等操作。
在计算机图形学中,四元数通常用来表示物体的旋转状态,比传统的旋转矩阵更为高效和精确。
总的来说,三维旋转矩阵是描述三维空间中旋转操作的重要工具,通过它们可以实现各种炫酷的视觉效果和动画效果。
掌握旋转矩阵的原理和应用,可以帮助我们更好地理解和实现三维空间中的旋转操作,为计算机图形学和动画领域的发展提供强有力的支持。
旋转矩阵表示

旋转矩阵表示旋转矩阵是在三维空间中描述旋转变换的一种数学工具。
它可以将一个三维向量绕某一轴进行旋转,并返回一个新的向量,具体而言,就是将一个向量绕x,y或z轴或自定义的轴旋转一定角度。
旋转矩阵在图像处理、计算机图形学、机器人学等领域中广泛应用。
1. 基本概念在三维空间中,一个向量可以表示成一个三元组(x,y,z),其中x, y, z分别代表向量在三个坐标轴上的投影。
向量的长度为根号下x方向上的平方加上y方向上的平方加上z方向上的平方。
向量的方向用一个单位向量描述,即向量长度为1。
旋转矩阵表示旋转变换的数学公式,用一个3x3的矩阵表示,如图1所示。
其中,x、y、z分别表示绕x、y、z轴的旋转矩阵,θ表示旋转角度。
这个公式表示的是顺时针绕某个坐标轴旋转θ度。
当θ为正时,表示顺时针旋转;当θ为负时,表示逆时针旋转。
2. 旋转矩阵的三个特性旋转矩阵具有三个基本特性,分别是正交性、行列式为1和对称性。
2.1 正交性定义:一个矩阵是正交矩阵,当且仅当其逆等于其转置。
正交矩阵在旋转矩阵中具有重要作用。
因为旋转矩阵是将一个向量绕某个轴进行旋转,因此旋转后的向量与原来的向量是等长的,也就是说,向量的长度是被保持不变的。
而且,旋转后的向量与轴垂直,即向量在旋转平面上的投影长度为0。
因此,旋转平面与旋转轴垂直,这意味着旋转矩阵是正交的。
2.2 行列式为1定义:行列式是一个用于描述方阵性质的标量,记作det(A),其中A是一个n阶矩阵。
对于旋转矩阵,其行列式为1。
行列式为1意味着在坐标系中执行旋转变换时,不仅向量的方向改变了,其长度也仍然等于原来的长度,但是方向发生了变化。
这也是旋转变换的重要特性之一。
2.3 对称性因为旋转矩阵是正交的,因此其转置等于其逆,即RT=R-1,也就是说,旋转变换的逆等于旋转变换的转置。
这个性质使得旋转变换在计算机图形学中享有广泛的应用,因为在计算机中,可以通过直接交换矩阵行和列来加速矩阵的计算。
四元数角度变换矩阵

四元数角度变换矩阵四元数是一种用来表示旋转的数学工具,它可以表示旋转的角度和旋转轴。
在计算机图形学和机器人学中广泛应用。
四元数角度变换矩阵是一种将四元数转换为旋转矩阵的方法。
旋转矩阵是一个3x3的矩阵,它描述了一个向量在旋转之后的方向。
四元数和旋转矩阵之间的转换公式如下:旋转矩阵 -> 四元数:给定一个旋转矩阵R,可以通过以下公式计算对应的四元数q:q = (r11 + r22 + r33 + 1)^(1/2)/2q0 = (r32 - r23) / (4*q)q1 = (r13 - r31) / (4*q)q2 = (r21 - r12) / (4*q)q3 = q其中,q0、q1、q2和q3分别表示四元数的四个分量,r11、r22、r33、r13、r31、r23、r32和r21是旋转矩阵R的元素。
四元数 -> 旋转矩阵:给定一个四元数q = (q0, q1, q2, q3),可以通过以下公式计算对应的旋转矩阵R:r11 = 1 - 2*(q2^2 + q3^2)r12 = 2*(q1*q2 - q0*q3)r13 = 2*(q0*q2 + q1*q3)r21 = 2*(q1*q2 + q0*q3)r22 = 1 - 2*(q1^2 + q3^2)r23 = 2*(q2*q3 - q0*q1)r31 = 2*(q1*q3 - q0*q2)r32 = 2*(q0*q1 + q2*q3)r33 = 1 - 2*(q1^2 + q2^2)其中,r11、r12、r13、r21、r22、r23、r31、r32和r33是旋转矩阵R的元素。
通过四元数角度变换矩阵,我们可以方便地在计算机程序中实现旋转变换。
旋转矩阵彩票公式[概览]
![旋转矩阵彩票公式[概览]](https://img.taocdn.com/s3/m/7a3b11f8f021dd36a32d7375a417866fb84ac036.png)
旋转矩阵彩票公式[概览]简介本文档旨在提供旋转矩阵彩票公式的概览。
旋转矩阵彩票是一种利用旋转矩阵的数学方法来预测彩票号码的方法。
通过对彩票号码进行旋转矩阵的变换,可以产生一系列新的号码组合,从而增加中奖的机会。
公式1. 旋转矩阵旋转矩阵是一个二维数组,用于对彩票号码进行变换。
下面是一个示例的旋转矩阵:[[1, 2, 3],[4, 5, 6],[7, 8, 9]]2. 变换规则通过旋转矩阵,我们可以对彩票号码进行以下变换规则:- 行变换:将彩票号码的每一行按照旋转矩阵的对应行进行重新排列。
- 列变换:将彩票号码的每一列按照旋转矩阵的对应列进行重新排列。
- 对角线变换:将彩票号码的对角线元素按照旋转矩阵的对应对角线元素进行重新排列。
3. 示例假设我们有一组彩票号码:[1, 2, 3, 4, 5, 6, 7, 8, 9]。
我们使用上述示例的旋转矩阵进行变换。
对于行变换,我们按照旋转矩阵的第一行进行重新排列,得到新的号码组合:[1, 2, 3, 4, 5, 6, 7, 8, 9]。
对于列变换,我们按照旋转矩阵的第一列进行重新排列,得到新的号码组合:[1, 4, 7, 2, 5, 8, 3, 6, 9]。
对于对角线变换,我们按照旋转矩阵的主对角线元素进行重新排列,得到新的号码组合:[1, 5, 9, 2, 6, 3, 4, 8, 7]。
通过以上变换,我们得到了三组新的号码组合,可以用于购买彩票。
注意事项旋转矩阵彩票公式仅为一种数学方法,不能保证中奖。
彩票是一种随机游戏,中奖几率取决于运气和概率。
请谨慎购买彩票,理性对待中奖。
参考资料。
根据旋转前后的向量值求旋转矩阵
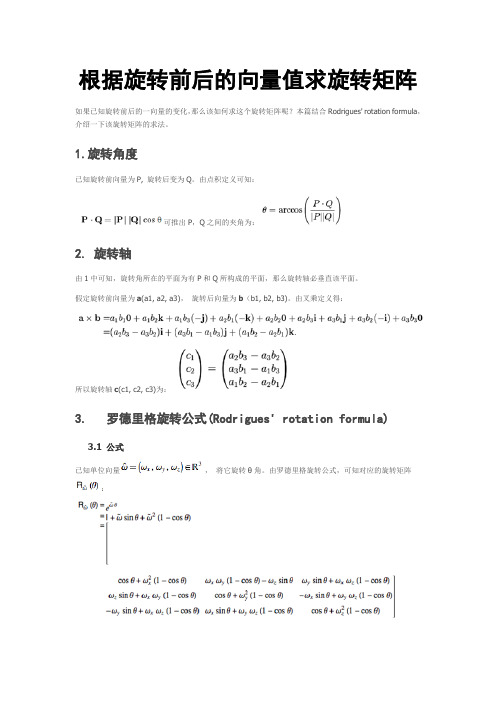
根据旋转前后的向量值求旋转矩阵如果已知旋转前后的一向量的变化,那么该如何求这个旋转矩阵呢?本篇结合Rodrigues' rotation formula,介绍一下该旋转矩阵的求法。
1.旋转角度已知旋转前向量为P, 旋转后变为Q。
由点积定义可知:可推出P,Q之间的夹角为:2. 旋转轴由1中可知,旋转角所在的平面为有P和Q所构成的平面,那么旋转轴必垂直该平面。
假定旋转前向量为a(a1, a2, a3),旋转后向量为b(b1, b2, b3)。
由叉乘定义得:所以旋转轴c(c1, c2, c3)为:3. 罗德里格旋转公式(Rodrigues' rotation formula)3.1 公式已知单位向量,将它旋转θ角。
由罗德里格旋转公式,可知对应的旋转矩阵:其中I是3x3的单位矩阵,是叉乘中的反对称矩阵r:3.2 公式证明假设在坐标系(x, y, z)中,向量v=ax+by+cz,v绕z轴逆时针旋转θ角后得到新的向量v’。
根据2维(x,y)面上的旋转公式可得:推出:已知:将上式带入v’的公式:将cz替换掉,可得:将上式中的叉乘表示为反对称矩阵得:另外:最终可以推出:上式即为罗德里格旋转公式。
4. 求旋转矩阵根据旋转前后的两个向量值,使用上面的方法,先求出旋转角度和旋转轴,然后用罗德里格旋转公式即可求出对应的旋转矩阵。
C#的实现代码如下:void Calculation(double[] vectorBefore, double[] vectorAfter){double[] rotationAxis;double rotationAngle;double[,] rotationMatrix;rotationAxis = CrossProduct(vectorBefore, vectorAfter);rotationAngle = Math.Acos(DotProduct(vectorBefore, vectorAfter) / Normalize(vectorBefore) / Normalize(vectorAfter));rotationMatrix = RotationMatrix(rotationAngle, rotationAxis);}double[] CrossProduct(double[] a, double[] b){double[] c = new double[3];c[0] = a[1] * b[2] - a[2] * b[1];c[1] = a[2] * b[0] - a[0] * b[2];c[2] = a[0] * b[1] - a[1] * b[0];return c;}double DotProduct(double[] a, double[] b){double result;result = a[0] * b[0] + a[1] * b[1] + a[2] * b[2];return result;}double Normalize(double[] v){double result;result = Math.Sqrt(v[0] * v[0] + v[1] * v[1] + v[2] * v[2]);return result;}double[,] RotationMatrix(double angle, double[] u){double norm = Normalize(u);double[,] rotatinMatrix = new double[3,3];u[0] = u[0] / norm;u[1] = u[1] / norm;u[2] = u[2] / norm;rotatinMatrix[0, 0] = Math.Cos(angle) + u[0] * u[0] * (1 - Math.Cos(angle));rotatinMatrix[0, 0] = u[0] * u[1] * (1 - Math.Cos(angle) - u[2] * Math.Sin(angle));rotatinMatrix[0, 0] = u[1] * Math.Sin(angle) + u[0] * u[2] * (1 - Math.Cos(angle));rotatinMatrix[0, 0] = u[2] * Math.Sin(angle) + u[0] * u[1] * (1 - Math.Cos(angle));rotatinMatrix[0, 0] = Math.Cos(angle) + u[1] * u[1] * (1 - Math.Cos(angle));rotatinMatrix[0, 0] = -u[0] * Math.Sin(angle) + u[1] * u[2] * (1 - Math.Cos(angle));rotatinMatrix[0, 0] = -u[1] * Math.Sin(angle) + u[0] * u[2] * (1 - Math.Cos(angle));rotatinMatrix[0, 0] = u[0] * Math.Sin(angle) + u[1] * u[2] * (1 - Math.Cos(angle));rotatinMatrix[0, 0] = Math.Cos(angle) + u[2] * u[2] * (1 - Math.Cos(angle));return rotatinMatrix;}•••••••••••••••••【唯美句子】走累的时候,我就到升国旗哪里的一角台阶坐下,双手抚膝,再闭眼,让心灵受到阳光的洗涤。
坐标旋转变换公式矩阵

坐标旋转变换公式矩阵在计算机图形学中,坐标旋转变换是一种常见的操作,用于将一个对象绕着坐标系中心或其他点进行旋转。
在进行坐标旋转变换时,我们通常会使用变换矩阵来描述这一操作。
本文将介绍坐标旋转变换公式矩阵的计算方法及其应用。
坐标旋转变换坐标旋转变换是指将一个坐标系中的点或对象围绕着某个轴或某个点进行旋转的操作。
在二维空间中,我们通常用一个角度来描述旋转的方向和角度;在三维空间中,我们还需要指定旋转的轴。
无论是二维还是三维空间,坐标旋转变换都可以用矩阵来表示。
二维坐标旋转变换在二维空间中,点的坐标通常用(x, y)表示,在对点进行逆时针旋转θ度时,旋转变换矩阵为:cos(θ) -sin(θ)sin(θ) cos(θ)其中,θ为旋转角度。
通过矩阵乘法,可以将二维坐标(x, y)旋转为新的坐标(x’, y’):x' = x * cos(θ) - y * sin(θ)y' = x * sin(θ) + y * cos(θ)三维坐标旋转变换在三维空间中,我们通常使用三维坐标(x, y, z)来描述点的位置。
当需要围绕坐标轴进行旋转时,我们可以使用不同的矩阵来实现绕不同轴的旋转。
以下是围绕x 轴、y轴和z轴的旋转变换矩阵:绕x轴旋转θ度:1 0 00 cos(θ) -sin(θ)0 sin(θ) cos(θ)绕y轴旋转θ度:cos(θ) 0 sin(θ)0 1 0-sin(θ) 0 cos(θ)绕z轴旋转θ度:cos(θ) -sin(θ) 0sin(θ) cos(θ) 00 0 1在三维空间中,旋转变换矩阵可以通过对向量点乘矩阵的方式实现坐标的旋转变换。
应用坐标旋转变换广泛应用于计算机图形学、计算机视觉等领域。
在计算机图形学中,通过旋转变换可以实现物体的旋转、动态效果等;在机器人的运动学中,坐标旋转变换可以描述机器人末端执行器的位置等。
总结:本文介绍了二维和三维坐标旋转变换的矩阵表示方法及应用场景,通过矩阵的乘法可以实现对坐标点的旋转操作。
三维坐标系旋转变换公式

三维坐标系旋转变换公式三维坐标系旋转变换公式是在几何中常用的一种数学变换,它既可以描述平面的旋转,又可以根据旋转角度和旋转轴,表达把物体从一个坐标系移动到另一个坐标系的变换。
本文重点介绍三维坐标系旋转变换公式的含义及其计算方法,并结合实例对其应用进行讨论。
一、三维坐标系旋转变换公式的含义三维坐标系,也称空间坐标系,是指三个坐标轴构成的坐标系,包括X轴、Y轴和Z轴,直观上它仿佛是一个立方体,其中每个方向上的坐标变化都可以依据三维坐标系旋转变换公式表达出来。
三维坐标系旋转变换公式定义为:$$x =cos(θ)x-sin(θ)y$$$$y=sin(θ)x+cos(θ)y$$$$z =z,$$其中θ表示坐标系旋转变换时所采用的旋转角度,x和y表示原坐标系中的坐标,x和y表示变换后的坐标。
二、三维坐标系旋转变换公式的计算在三维坐标系中,当给定旋转角度和旋转轴时,可以根据三维坐标系旋转变换公式计算坐标变换。
旋转轴的方向可以用单位向量描述,单位向量的方向是指该向量在原点指向的方向,以及该向量的大小。
计算坐标变换时,首先需要计算旋转矩阵,旋转矩阵定义为:$$R=begin{bmatrix}cos(θ) & sin(θ) & 0-sin(θ) & cos(θ) & 00 & 0 & 1end{bmatrix}$$旋转矩阵可以表示坐标系旋转时的线性变换,在坐标变换时,可以将坐标矩阵与旋转矩阵进行乘积运算,即可得到变换后的坐标。
三、三维坐标系旋转变换实例假设存在一个三维坐标系,其中的坐标为(1,2,3),且坐标系旋转角度为90度,旋转轴方向为(1,0,0),则可以用三维坐标系旋转变换公式计算变换后的坐标。
首先,计算旋转矩阵,根据旋转变换公式可知,当θ=90°时,旋转矩阵为:$$R=begin{bmatrix}0 & 1 & 0-1 & 0 & 00 & 0 & 1end{bmatrix}$$然后,将待变换的坐标(1,2,3)与旋转矩阵进行乘积,可以得到变换后的坐标(2,-1,3)。
zyx欧拉角的旋转变换矩阵

zyx欧拉角的旋转变换矩阵
欧拉角是描述三维空间中物体旋转情况的一种方法。
在计算机图形学和机器人学中,欧拉角经常被用来表示物体的姿态和位姿。
同时,欧拉角也可以转换成矩阵,进行旋转变换。
在欧拉角中,有三个角度,分别是绕x轴旋转的角度α、绕y轴旋转的角度β和绕z轴旋转的角度γ。
这三个角度的旋转顺序可以有不同的选择,常见的有ZXZ、XYZ、ZYX等。
在本文中,我们主要讨论ZYX欧拉角的旋转变换矩阵。
ZYX欧拉角的旋转矩阵可以表示为:
R = Rz(γ)Ry(β)Rx(α)
其中,Rx(α)表示绕x轴旋转α角度的旋转矩阵,Ry(β)表示绕y轴旋转β角度的旋转矩阵,Rz(γ)表示绕z轴旋转γ角度的旋转矩阵。
这三个旋转矩阵可以用以下公式计算:
Rx(α) = [ 1 0 0 ]
[ 0 cos(α) -sin(α) ]
[ 0 sin(α) cos(α) ]
Ry(β) = [ cos(β) 0 sin(β) ]
[ 0 1 0 ]
[-sin(β) 0 cos(β) ]
Rz(γ) = [ cos(γ) -sin(γ) 0 ]
[ sin(γ) cos(γ) 0 ]
[ 0 0 1 ]
将以上三个旋转矩阵乘起来,就可以得到ZYX欧拉角的旋转变换矩阵R。
在实际应用中,我们可以通过欧拉角和旋转矩阵之间的相互转换,方便地进行物体的姿态和位姿控制。
坐标系转换旋转矩阵

坐标系转换旋转矩阵坐标系转换旋转矩阵是一种常用的数学工具,用于描述物体在不同坐标系中的方向和位置。
在三维空间中,坐标系转换旋转矩阵通常由一个3×3矩阵表示,称为旋转矩阵。
旋转矩阵可以将某个坐标系的坐标系旋转到另外一个坐标系中,从而实现坐标系的转换。
在描述一个物体的运动和姿态时,我们通常需要使用不同的坐标系。
例如,对于一架飞机来说,有地面坐标系、飞机坐标系、机身坐标系等不同的坐标系。
为了方便描述飞机的运动和姿态,需要将它们之间建立转换关系。
旋转矩阵就是用来描述不同坐标系之间的转换关系的。
旋转矩阵的定义非常简单,它可以由三个基本的旋转矩阵相乘得到。
这三个基本的旋转矩阵分别是绕x轴旋转、绕y轴旋转、绕z轴旋转的矩阵。
以绕z轴旋转为例,设旋转角度为θ,则绕z轴旋转的矩阵为:cosθ -sinθ 0sinθ cosθ 00 0 1将绕x轴和绕y轴旋转的矩阵与绕z轴旋转的矩阵相乘,就可以得到任意旋转角度、任意旋转轴的旋转矩阵。
对于一个物体在坐标系A中的坐标点p,如果需要将其转换到坐标系B中,就需要使用旋转矩阵将坐标系A中的坐标点旋转到坐标系B中的位置。
即有以下公式:p_B = R*p_A其中,p_A和p_B分别表示在坐标系A和B中的坐标点,R表示A坐标系到B坐标系的转换矩阵。
需要注意的是,在实际应用中,旋转矩阵的计算并不简单。
例如,在真实的三维空间中,物体的旋转轴和旋转角度可以是任意的,这就需要使用更加复杂的旋转矩阵计算公式。
此外,还需要考虑形变、变形等因素对坐标系转换的影响。
总之,坐标系转换旋转矩阵是一种非常重要的数学工具,在计算机图形学、航空航天、机械制造等领域都有广泛的应用。
掌握旋转矩阵的基本概念和计算方法,对于理解和应用相关领域的知识都非常有帮助。
c++ 旋转矩阵转欧拉角公式

c++ 旋转矩阵转欧拉角公式
欧拉角是描述物体在空间中旋转状态的一种方法,旋转矩阵是将欧拉角转换成具体的旋转矩阵表示的一种方式。
下面介绍旋转矩阵转欧拉角的公式。
假设旋转矩阵表示的旋转顺序为先绕z轴旋转,再绕x轴旋转,最后绕y轴旋转,其旋转矩阵为:
R = Rz(α)Rx(β)Ry(γ)
其中,Rz(α),Rx(β),Ry(γ)分别表示绕z轴、x轴、y轴旋转的旋转矩阵,α、β、γ分别为绕z轴、x轴、y轴旋转的欧拉角。
通过分析旋转矩阵,我们可以得到以下公式:
sin(β) = -R(3,1)
cos(β)*sin(γ) = R(1,3)
cos(β)*cos(γ) = R(1,1)
通过上述公式我们可以求出β和γ的值,而α的值由于
sin(α)在任何情况下也只有两个解,所以α的值需要再求解。
综上所述,上述公式即为旋转矩阵转欧拉角的公式。
(完整word版)旋转矩阵公式法

(完整word版)旋转矩阵公式法旋转矩阵公式法!⼀,选11个号,中了5个号,100%能组合到 4 个号。
假设你选了01、02、03、04、05、06、07、08、09、10、11,则可以组合成以下22 注,需投⼊44 元:1)01、05、07、09、112)01、05、06、08、103)01、04、06、08、094)01、04、05、、07、08、11 6)01、03、04、09、10 7)01、02、06、10、11 8)01、02、04、08、11 9)0106、0710)01、02、03、05、09 11)02、07、08、09、1012)02、05、06、07、08 13)02、04、07、09、11 14)02、04、05、06、09 15)02、03、05、10、11 16)02、03、04、08、1017)03、06、08、09、11 18)03、06、07、09、10 19)03、04、05、07、08 20)03、04、05、06、1121)04、06、07、10、11⼆,选11个号,中了4 个号,100%能组合到 4 个号。
假设你选了01、02、03、04、05、06、07、08、09、10、11,则可以组合成以下66 注,只要132 元就能搞定:1)01、07、08、09、102)01、06、07、09、113)01、05、08、09、114)01、05、07、10、11、08、10 6)01、04、09、10、11 7)01、04、06、08、11 8)01、04、06、07、10 9)01、0410)01、04、05、06、09 11)01、03、08、10、11 12)01、03、06、09、10 13)01、03、06、07、08 14)01、03、05、0705、06、1116)01、03、04、08、0917)01、03、04、07、1118)01、03、04、05、1019)01、02、07、08、1120)01、02、06、10、1121)01、02、06、08、0922)01、02、05、09、1023)01、02、05、06、0724)01、02、04、08、1025)01、02、04、07、0926)01、02、04、05、1127)01、02、03、09、1128)01、02、03、07、1031)02、08、09、10、1132)02、06、07、09、1033)02、05、07、09、1134)02、05、07、08、1035)02、05、06、08、1136)02、04、07、10、1137)02、04、06、09、1138)02、04、06、07、0839)02、04、05、08、0940)02、04、05、06、1041)02、03、07、08、0942)02、03、06、08、1043)02、03、06、07、1144)02、03、05、10、1145)02、03、05、06、0946)02、03、04、09、1047)02、03、04、08、1148)02、03、04、05、0749)03、07、09、10、1150)03、06、08、09、1151)03、05、08、09、1052)03、05、07、08、1153)03、05、06、07、1054)03、04、07、08、1055)03、04、06、10、1156)03、04、06、07、0957)03、04、05、09、1158)03、04、05、06、0859)04、07、08、09、1160)04、06、08、09、1061)04、05、08、10、1162)04、05、07、09、1063) 0466) 06、 07、 08、 10、 11 三,选 11 个号,以每注 6个号的⼩复式进⾏组合,中了5 个号, 100%能组合到 5个号。
eigen 四元数转旋转矩阵
eigen 四元数转旋转矩阵
四元数是一种复数,它由一个实部与三个虚部组成,它们经常被用于表示旋转。
四元数是一种广泛使用的表达旋转的表示形式,它可以用来表达三维旋转,也就是三维坐标系中旋转一个物体所需要的变换。
四元数由它的实部 $a$ 与三个虚部 $b,c,d$ 的乘积来表达,它的形式可以写为:
$q = a + bi + cj + dk$
它还满足下面的关系:
$q = |q| \times ( \cos \theta + \frac{\sin \theta}{|q|}(bi + cj + dk) )$
其中,$|q| = \sqrt{a^2 + b^2 + c^2 + d^2}$,$\theta$ 是四元数 $q$ 的模。
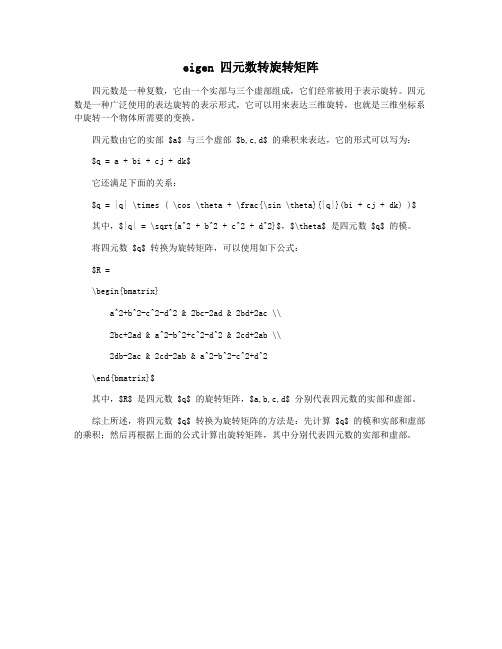
将四元数 $q$ 转换为旋转矩阵,可以使用如下公式:
$R =
\begin{bmatrix}
a^2+b^2-c^2-d^2 & 2bc-2ad & 2bd+2ac \\
2bc+2ad & a^2-b^2+c^2-d^2 & 2cd+2ab \\
2db-2ac & 2cd-2ab & a^2-b^2-c^2+d^2
\end{bmatrix}$
其中,$R$ 是四元数 $q$ 的旋转矩阵,$a,b,c,d$ 分别代表四元数的实部和虚部。
综上所述,将四元数 $q$ 转换为旋转矩阵的方法是:先计算 $q$ 的模和实部和虚部的乘积;然后再根据上面的公式计算出旋转矩阵,其中分别代表四元数的实部和虚部。
std法计算 旋转

std法计算旋转旋转是一种常见的几何变换,它可以将一个对象绕着某个中心点旋转一定角度。
在计算机图形学中,旋转是一个重要的操作,它可以用来实现许多图形效果,如旋转动画、3D模型的旋转等。
在计算机图形学中,旋转是通过矩阵运算来实现的。
具体来说,我们可以使用标准库中的std法来进行旋转计算。
std法是一种常用的旋转计算方法,它使用正弦函数和余弦函数来计算旋转矩阵的各个元素。
在使用std法进行旋转计算时,我们需要提供旋转的角度和旋转的中心点。
角度可以用弧度或角度来表示,中心点可以用一个二维或三维向量来表示。
根据提供的角度和中心点,我们可以计算出旋转矩阵,并将其应用到需要旋转的对象上。
旋转矩阵的计算方法如下:1. 将旋转角度转换为弧度。
如果提供的是角度,则需要将其转换为弧度,可以使用角度到弧度的转换公式:弧度 = 角度* π / 180。
2. 计算旋转矩阵的各个元素。
旋转矩阵是一个2x2矩阵或3x3矩阵,其中元素的计算公式如下:- 对于二维旋转矩阵:| cos(θ) -sin(θ) || sin(θ) cos(θ) |- 对于三维旋转矩阵,假设旋转轴为单位向量u,旋转角度为θ,则旋转矩阵的计算公式如下:| u_x^2(1-cos(θ))+cos(θ) u_xu_y(1-cos(θ))-u_zsin(θ) u_xu_z(1-cos(θ))+u_ysin(θ) || u_yu_x(1-cos(θ))+u_zsin(θ) u_y^2(1-cos(θ))+cos(θ) u_yu_z(1-cos(θ))-u_xsin(θ) || u_zu_x(1-cos(θ))-u_ysin(θ) u_zu_y(1-cos(θ))+u_xsin(θ) u_z^2(1-cos(θ))+cos(θ) |在应用旋转矩阵到对象上时,我们需要将对象的坐标表示为一个向量,并将旋转矩阵与该向量相乘,得到旋转后的坐标向量。
如果对象是一个二维图形,则需要使用2x2矩阵与2维向量相乘;如果对象是一个三维图形,则需要使用3x3矩阵与3维向量相乘。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
旋转矩阵公式法!一,选11个号,中了5个号,100%能组合到4个号。
假设你选了01、02、03、04、05、06、07、08、09、10、11,则可以组合成以下22注,需投入44元:(1)01、05、07、09、11(2)01、05、06、08、10(3)01、04、06、08、09(4)01、04、05、07、10(5)01、03、07、08、11(6)01、03、04、09、10(7)01、02、06、10、11(8)01、02、04、08、11(9)01、02、03、06、07(10)01、02、03、05、09(11)02、07、08、09、10(12)02、05、06、07、08(13)02、04、07、09、11(14)02、04、05、06、09(15)02、03、05、10、11(16)02、03、04、08、10(17)03、06、08、09、11(18)03、06、07、09、10(19)03、04、05、07、08(20)03、04、05、06、11(21)04、06、07、10、11(22)05、08、09、10、11二,选11个号,中了4个号,100%能组合到4个号。
假设你选了01、02、03、04、05、06、07、08、09、10、11,则可以组合成以下66注,只要132元就能搞定:(1)01、07、08、09、10(2)01、06、07、09、11(3)01、05、08、09、11(4)01、05、07、10、11(5)01、05、06、08、10(6)01、04、09、10、11(7)01、04、06、08、11(8)01、04、06、07、10(9)01、04、05、07、08(10)01、04、05、06、09(11)01、03、08、10、11(12)01、03、06、09、10(13)01、03、06、07、08(14)01、03、05、07、09(15)01、03、05、06、11(16)01、03、04、08、09(17)01、03、04、07、11(18)01、03、04、05、10(20)01、02、06、10、11 (21)01、02、06、08、09 (22)01、02、05、09、10 (23)01、02、05、06、07 (24)01、02、04、08、10 (25)01、02、04、07、09 (26)01、02、04、05、11 (27)01、02、03、09、11 (28)01、02、03、07、10 (29)01、02、03、05、08 (30)01、02、03、04、06 (31)02、08、09、10、11 (32)02、06、07、09、10 (33)02、05、07、09、11 (34)02、05、07、08、10 (35)02、05、06、08、11 (36)02、04、07、10、11 (37)02、04、06、09、11 (38)02、04、06、07、08 (39)02、04、05、08、09 (40)02、04、05、06、10 (41)02、03、07、08、09 (42)02、03、06、08、10 (43)02、03、06、07、11 (44)02、03、05、10、11 (45)02、03、05、06、09 (46)02、03、04、09、10 (47)02、03、04、08、11 (48)02、03、04、05、07 (49)03、07、09、10、11 (50)03、06、08、09、11 (51)03、05、08、09、10 (52)03、05、07、08、11 (53)03、05、06、07、10 (54)03、04、07、08、10 (55)03、04、06、10、11 (56)03、04、06、07、09 (57)03、04、05、09、11 (58)03、04、05、06、08 (59)04、07、08、09、11 (60)04、06、08、09、10 (61)04、05、08、10、11 (62)04、05、07、09、10(64)05、06、09、10、11(65)05、06、07、08、09(66)06、07、08、10、11三,选11个号,以每注6个号的小复式进行组合,中了5个号,100%能组合到5个号。
假设你选了01、02、03、04、05、06、07、08、09、10、11,则可以组合成以下100注,需要投入1200元:(1)01、07、08、09、10、11(2)01、06、07、08、09、11(3)01、05、06、09、10、11(4)01、05、06、07、08、10(5)01、04、08、09、10、11(6)01、04、06、07、08、10(7)01、04、05、07、09、10(8)01、04、05、07、08、11(9)01、04、05、07、08、09(10)01、04、05、06、10、11(11)01、04、05、06、09、11(12)01、03、06、08、09、10(13)01、03、06、07、10、11(14)01、03、05、08、10、11(15)01、03、05、07、09、11(16)01、03、05、07、09、10(17)01、03、05、06、08、11(18)01、03、05、06、08、09(19)01、03、04、08、09、11(20)01、03、04、07、10、11(21)01、03、04、06、09、10(22)01、03、04、06、08、11(23)01、03、04、06、07、09(24)01、03、04、05、08、10(25)01、03、04、05、06、07(26)01、02、06、08、10、11(27)01、02、06、07、09、10(28)01、02、05、08、09、11(29)01、02、05、08、09、10(30)01、02、05、07、10、11(31)01、02、05、06、07、11(32)01、02、05、06、07、09(33)01、02、04、08、10、11(34)01、02、04、07、09、11(35)01、02、04、06、08、09(36)01、02、04、06、07、11(37)01、02、04、05、07、10(38)01、02、04、05、06、08(40)01、02、03、07、08、11 (41)01、02、03、07、08、10 (42)01、02、03、07、08、09 (43)01、02、03、06、09、11 (44)01、02、03、06、07、08 (45)01、02、03、05、07、08 (46)01、02、03、05、06、10 (47)01、02、03、04、09、10 (48)01、02、03、04、07、08 (49)01、02、03、04、06、10 (50)01、02、03、04、05、11 (51)01、02、03、04、05、09 (52)02、06、07、08、09、11 (53)02、05、07、08、10、11 (54)02、05、06、08、09、11 (55)02、05、06、07、09、10 (56)02、04、07、08、09、10 (57)02、04、06、09、10、11 (58)02、04、06、07、08、10 (59)02、04、05、09、10、11 (60)02、04、05、07、09、11 (61)02、04、05、07、08、11 (62)02、04、05、07、08、09 (63)02、04、05、06、08、10 (64)02、04、05、06、07、11 (65)02、03、08、09、10、11 (66)02、03、07、09、10、11 (67)02、03、06、08、09、10 (68)02、03、06、07、10、11 (69)02、03、05、08、09、11 (70)02、03、05、07、09、10 (71)02、03、05、06、10、11 (72)02、03、05、06、07、08 (73)02、03、04、08、09、11 (74)02、03、04、07、10、11 (75)02、03、04、06、08、11 (76)02、03、04、06、07、09 (77)02、03、04、05、08、10 (78)02、03、04、05、07、11 (79)02、03、04、05、06、09 (80)03、06、08、09、10、11 (81)03、06、07、08、09、10 (82)03、05、07、08、10、11(84)03、05、06、07、09、11(85)03、04、07、08、09、11(86)03、04、07、08、09、10(87)03、04、06、08、10、11(88)03、04、06、08、09、11(89)03、04、06、07、08、11(90)03、04、05、09、10、11(91)03、04、05、07、08、09(92)03、04、05、06、08、11(93)03、04、05、06、07、10(94)04、06、07、09、10、11(95)04、05、08、09、10、11(96)04、05、07、08、10、11(97)04、05、06、08、09、10(98)04、05、06、07、08、09(99)05、07、08、09、10、11(100)05、06、07、08、10、11因为第三种方案是6个号的小复式组合,所以投入比全包11个号要多。
但是,这种6个号的小复式组合的优势在于,一旦命中全部5个开奖号码,能够中一注以上的一等奖,而全包11个号最多只会有一注一等奖。
有兴趣的读者不妨检测一下。