一种精确的虹膜定位方法
一种新的虹膜定位算法
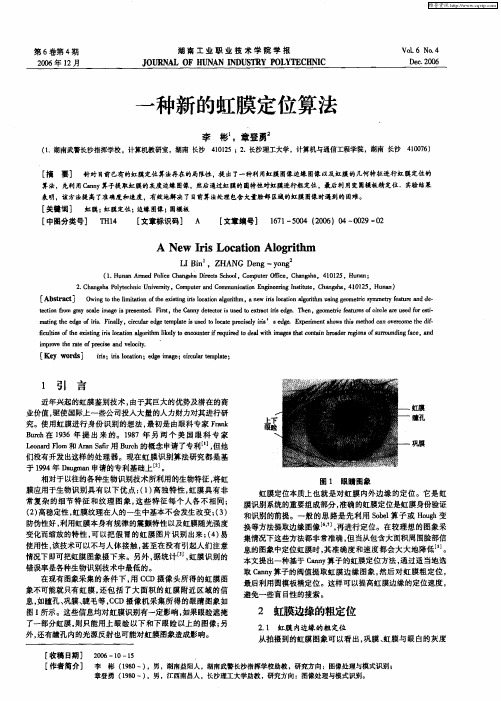
巩膜
图 1 眼睛 图象
常复杂的细节特征 和纹理 图象, 这些特征每个人各不相 同; () 2 高稳定性 , 虹膜纹理在人的一生中基本不会发生改变;3 () 防伪性好 , 利用虹膜本身有规律 的震颤 特性以及虹膜随光强度 变化而缩放 的特性 , 以把假 冒的虹膜 图片 识别 出来 ;4 易 可 () 使用性 , 该技术可以不与人体接触 , 甚至在没有引起人们注意 情况下即可把虹膜图象摄下来。另外 , 据统计 。 J虹膜识别的 错误率是各种生物识别技术中最低的。 在现有图象采集的条件下, C D摄像头所得的虹膜图 用 C 象不可能就只有虹膜 , 还包括了大面积的虹膜附近区域的信 息, 如瞳孔 、 、 巩膜 睫毛等 ,C C D摄像 机采集所 得 的眼睛图象如 图l 所示。这些信息均对虹膜识别有一定影响, 如果眼睑遮掩 了一部分虹膜, 则只能用上眼睑以下和下眼睑以上的图像 ; 另 外, 还有瞳孔内的光 源反射也 可能对 虹膜图象造成影 响。
1 引
言
虹膜 瞳孔
近年兴起的虹膜 鉴别技术 , 由于其巨大的优势及潜在的商 业价值, 驱使国际上一些公司投入大量的人力财力对其进行研 究。 使用虹膜进行身份识别的想法 。 最初是由跟科专家 Fak r n Bt 在 13 u h 96年提 出来 的。18 c 97年 另两个 美国眼科 专家 Loa o 和 Aa ar Br e rHr nd n r Sf 用 uc n i h的概念申请了专利…, 但他 们没有开发出这样的处理器。现在虹膜识别算法研究都是基 于 19 94年 Dur n申请的专利基础上 。 ag a n J 相对于 以 的各 种生物识别技术所 利用的生物特征 , 往 将虹
一种基于圆几何特征的虹膜定位算法

1 引言
虹膜是指 白色巩膜与黑色瞳孔之 间的色素沉着 区
虹膜 内外边界都具有较好的圆环特性 ,因此传统
的虹膜定位算 法都是采 用圆形检测算子提取虹膜 内外 边缘。 定位虹膜 定位 方法主要有 J h a g n提 出 o nD u ma
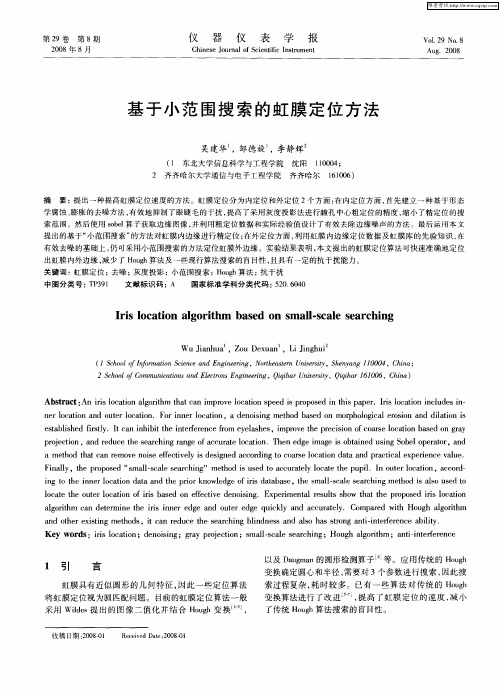
域 ,如图 1所示。虹膜 识别具 有普遍性 、唯一性 、稳 定性 、受保护性、非入侵 检测性和 防伪性等优点。非 入侵检测性( 或非接触式) 的生物特征 识别是 身份 鉴别 研究与应用发展 的必 然趋 势 ,与人脸 、声音和 步态等
采集 的虹膜 图像质量的不确 定性 ,上述算法都有一定
性。据 统计 ,虹膜识别 的错误率是 各种 生物特征识别 中最低 的【。 I 】
虹膜识别技术主要 由虹膜 图像采集 、虹膜定位 、 特征提取 、匹配 与识别等几个环节组成。虹膜定位就 是虹膜 内边缘( 瞳孔) 与虹膜外边缘 的定位 , 由于图像采
2 01 0年 第 1 9卷 第 1 期 0
计算法①
魏 炜 ( 苏州卫生职业业技术学院 江 苏 苏州 2 0 2 1 0) 5
摘
要 : 虹膜定位是 虹膜识 别 中基础性环 节,其精度和 速度 决定 了虹膜识别 系统的性能 ,为提 高虹膜定位 的速
的耦 合性缩小微积分方法搜索外边缘 的范 围 ,减少运
的适 用范 围 ,微积分 方法定位精度高 ,缺点是计算量 大, 且容 易受到局部光源 的影响 ; o g H u h变换与最小
二乘法是基于 二值化边界点 的定位方法 ,其前提是必 须将边界点与非边界点区分开来 , 否则不 能精确定位 ,
该算法也存在计算量大的问题。 针对以上算法的局限 , 许多文献提 出了粗定位与精定位相结合的方法 ,既保 证了定位精度 ,也提高 了定位 速度。本 文提 出了一种 利 用圆几何 特征快速定位 虹膜 内边缘 ,结合 内外边缘
虹膜图像采集方法

虹膜图像采集方法一、引言虹膜作为人体唯一的、不可伪造的生物特征之一,因其高度的特异性和稳定性在生物识别技术中被广泛应用。
而虹膜图像的采集方法对于准确、高效地获取虹膜信息至关重要。
本文将介绍几种常见的虹膜图像采集方法,并对其优缺点进行比较分析。
二、直接照相法直接照相法是一种简单常用的虹膜图像采集方法。
此方法通过虹膜摄像机,将被采集者的眼睛对准摄像头,通过摄像头直接拍摄眼睛的虹膜。
这种方法无需接触眼睛,操作便捷,适用于大规模人群的虹膜图像采集。
然而,直接照相法存在一些问题。
首先,虹膜的成像受到环境光线的影响较大,若光线不均匀或强烈,可能导致虹膜成像质量下降。
其次,由于直接照相法无法控制被采集者的眼部位置和注视点,所拍摄的虹膜图像可能存在位置偏差,影响后续的虹膜匹配与识别效果。
三、近红外反射法近红外反射法是目前较为广泛应用的虹膜图像采集技术之一。
此方法通过近红外光源向眼睛投射特定波长的光线,虹膜组织吸收一部分光能,其余部分被反射回来,经过摄像头捕获并生成虹膜图像。
近红外反射法较好地解决了直接照相法的环境光影响问题,并且能够通过特定波长的近红外光源对虹膜进行有效照亮,提高虹膜图像的质量。
此外,近红外反射法还可以根据被采集者的眼部位置和注视点进行定位,提高虹膜位置的准确性。
然而,近红外反射法也存在一些限制。
首先,该方法需要特殊的设备支持,成本相对较高。
其次,受到眼部眨动、眼球转动等生理因素影响,可能导致图像模糊或部分缺失。
因此,稳定控制被采集者的眼球位置和注视点仍然是一项挑战。
四、全息图法全息图法是虹膜图像采集的一种新兴方法。
此方法利用全息成像原理,将被采集者的眼睛置于全息摄像机的特定光学装置中,通过全息录制技术将虹膜图像以全息形式记录下来。
全息图法的优点在于能够以全息形式保存虹膜图像,具有更高的维度信息。
此外,全息图法不受环境光的影响,能够在复杂光照条件下获得更好的图像质量。
而且,全息图法可以在后期对图像进行重建和增强,提高图像的清晰度和分辨率。
快速准确的虹膜定位算法

u e h ro i n wl d e h t h e tr f n e o n ay a do tr o n a y i v r o e a r wi gt es a c n e f a c l s t o s ep r k o e g a ec n e in r u d r u e u d r e c s ,n ro n e hr g c lu u h d t i t t o b n b s y l h r a o me
定 位外 边缘 的搜 索范 围,从 而显著 提 高 了虹膜 定位速度 。 实验 结果表 明,该 算法显著提 高了虹膜 定位速度 且具 有较 高的定
位 精度 。
关 键 词 :虹 膜 定 位 ; 圆几 何 特 征 ; 内边 缘 粗 定 位 ; 外 边 缘 定 位 ; 微 积 分 方 法
中图法分 类号 :P 9 .1 T 31 4
(. 勤 工程 学 院 研 究 生 1 ,重庆 4 0 1;2 鹤 壁职 业技 术 学院 电子信 息 工程 系, 河南 鹤 壁 4 83 ; 1后 队 006 . 50 0 3 .后 勤工程 学 院 训练 部模 拟 中心 ,重庆 4 0 1 ;4 重 庆 师范 大学 ,重庆 4 0 3) 006 . 0 00
摘 要 :针对 经典虹膜 定位算 法速度较慢 的问题 , 出一种基 于 圆几何 特征 的粗定位 与精定位 结合 的快速虹膜 定位 算法。 提
虹膜定位

虹膜定位
编辑
目录
1虹膜定位的原理
2虹膜定位的特点
IR-SUPER-LASIK----这个是虹膜定位下波前像差引导的LASIK.比告诉你SUPER-LASIK是最先进的技术的医生所说的手术方式更为先进.虹膜定位是个追踪系统,有了这个追踪系统的辅助后,激光机能最精确的在角膜基质层上打激光.能给患者带来最好的术后效果和视觉质量.
说白了就是个激光治疗近视手术的辅助手法,帮助手术中激光定位
1虹膜定位的原理编辑
虹膜定位系统其原理是将波前的影像摄取后,将眼球虹膜的影像做分析,由于每个人的虹膜就如指纹般,其表面样式皆是独一无二的,因此波前与虹膜定位系统将所得的虹膜影像分析比较后,取得相符的虹膜定位点,在进行激光手术实施时,计算出眼球转动角度及偏移位置,适时改变激光治疗的切削角度,做一自动补偿修正,使病人在坐立时的波前检测资料,与在进行激光手术治疗仰卧时取得的眼睛影像得已完全吻合,其能使散光和高阶像差得到更精确地治疗。
2虹膜定位的特点编辑
个性安全:虹膜定位源于虹膜识别技术。
虹膜纹理和指纹一样,极具个性特征,目前世界上还没有发现虹膜特征重复的案例,即使同一个人的左右眼虹膜特征也有很大区别。
除了白内障等原因外,即使是接受了角膜移植手术,虹膜特征也不会改变。
相关文献
∙不完美虹膜图像定位方法-应用科技-2012年第6期(5)
∙基于TMS320DM6446和TVP5158的虹膜识别系统-数据采集与处理-2012年第6期(7)
∙应用统计距离实现虹膜定位-光学精密工程-2012年第11期(7)
以上文献来自于
>> 查看更多相关文献。
虹膜图像定位方法的研究

感兴趣 的部 分 。本文 采用二 维统计 顺序滤 波 ,它 是 中值滤 波 的演变和推 广 ,该 方法与其 他滤波 方法 相
比, 有效地 减少 了图像 的噪 声, 到了预 期的 目地 。 达 但 是虹膜 与巩膜 的边 缘不 是很清 晰 ,给定位 带来 了 困难 ,所 以又进 行 了锐化处 理 。采用 拉 氏算 子对对 象 进行运 算 ,模糊 部分 得到 了锐化 ,特 别是 模糊 的
Wa d . el a ia o ft e o ti e o h e ii g d p e p o d c nn p r t ra d n w s ma e T o l z t n o h u sd ft se ea o t a i r ve a y o a o e h c i r d d n m e n ho g r n f r o u h ta so m i c mbi to ft e t n na n o wo. ee p rme t e u te pa a ,t sme o a re t i h h T x e i n a r s l x t ms hi t d C o in l i h n h ntm l n t ei e a a de tr a d g ft eii c ur tl n dmor a t x e n le eo h rsa c ae ya ef s.
XU u — i g ZHANG in Ch n q n , Ja
( n o m to ce c I f r ai n S in e& En i e dn l g , a nn i e st f h oo y J lh u 1 0 , h n ) gn e gCo l e Lio i g Un v ri 0 1 n l g ’ iz o 21 01 C i a e y l
精确定位虹膜的眼动跟踪算法
m o d e l s f o r e y e s a n d g a z e[ J ] . I E E E T r a n s o n P a t t e r n A n a l y s i s
a nd Ma c hi n e I n t e l l i g e nc e ,2 0 1 0, 3 2( 3 ): 4 7 8 — 5 0 0 .
c e e d i n g s o f t he I n t e r n a t i o n a l Co n f e r e n c e o n Wa v e l e t An a l y s i s
a nd Pa t t e r n Re c o g n i t i o n,2 0 0 7:6 8 7 2 .
[ 3 ]Z HA N G Z u t a o .D r i v e r ’ s e y e t r a c k i n g t e c h n o l o g y r e s e a r c h b a s e d o n s a m p l i n g t h e o r y o f s t r o n g t r a c k i n g n o n - l i n e a r f i l t e r[ D ] .
在计算虹膜区域梯度方 向特征时 ,增加 了时间,但是 由于增 强了跟踪 目标 与干扰 因素的差异 ,均值漂移迭代次 数大大减 少 ,一般 只需要 1 — 2次 ,故在耗时上 低于其他方法 。本 文算
参考 文 献 :
E l i Q i Y i n g , Wa n g Z h i l i a n g , Hu a n g Y i n g .A n o n - c o n t a c t e y  ̄ g a z e t r a c k i n g s y s t e m f o r h u ma n c o mp u t e r i n t e r a c t i o n[ c ]/ /P r o —
一种虹膜定位算法
中图法分 类号
An I i c to g r t m r s Lo a i n Al o i h
W a g Ch n r Hu Z e g ig Lin Qi s e g n egu h n pn a u hn
( nt ueo ma ePrc s n ,Y n h n Unv ri ,Qih a g a 0 6 0 ) I s t t f I g oes g a s a iest i i y nun do 6 0 4
s m e r e t r nd e ge de e to r ym t y f a u e a d t c i n f om a c l m a spr s n e gr y s ae i gei e e t d. Bas d o t si a,t e i pr e e n hi de h m ov d Sob ld — e e
c er,t n he ii nt ror a ent he t rs i e i nd ext ror r d ia e de e t d by u i g r di s ogr m oug r ns o m . Re uls e i a i r t c e s n a us hit a ofH h ta fr s t s how ha he m e h a m pr t t t t od c n i ove l a i n s e nd i oc to pe d a s nots nstve t oie efe t e ii o n s f c .
Ke r ii o aton,ii d ntfc to , ice de e t y wo ds rs l c i rsi e iia in cr l t c or, ou r H gh tansor f m
基于小范围搜索的虹膜定位方法
学腐蚀 、 膨胀的去噪方法 , 有效 地抑制 了眼睫毛的干扰 , 提高 了采用灰度投影 法进行瞳孑 中心粗定位的精度 , L 缩小了精定位 的搜 索范围。然后使用 sbl o e 算子获取边缘 图像 , 并利用粗定位数据和实际经验值设计 了有效去除边缘 噪声 的方法 。最后 运用 本文 提出的基于“ 小范围搜索 ” 的方法对虹膜 内边缘进行精定位 ; 在外定 位方 面 , 利用虹膜 内边缘定位数据及 虹膜库的先验知识 , 在
i g t h n e o a in d t n h ro n wld eo rsd tba e,t e s l ls a es ac n t o sas s d t n o t e i n rlc t aa a d t e p rk o e g fi aa s o i i h ma —c e rhig meh d i lou e o l
po c o , n d c e er igr g f cua ct n T e d eiaeio t nduigSbl prt , n r et n adr uet ac n n e c r el ao . h neg g ba e s o e o e o ad j i e hs h a oa t o i neadE gne n N r e t nU i rt, hnag10 0 ,C i ; colfI om t nSi c n n i r g, o ha e nv sy Seyn 1 04 hn n o e ei t  ̄r ei a 2Sho o o mui t n n l t n E gne n , ih rU i rt,Qqhr 6 06, hn ) col C m n ai s dEe r s ni r g Qq a n e i f c o a co ei i v sy i a 10 C ia i 1
一种基于几何特征的虹膜定位算法
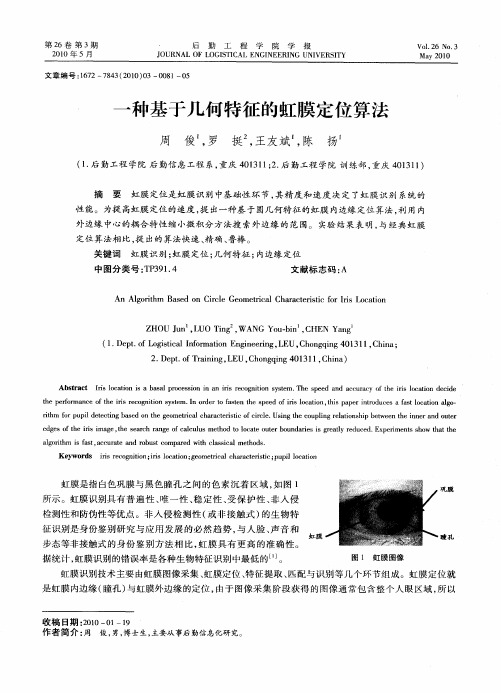
虹膜 是 指 白色巩 膜 与 黑 色 瞳孔 之 间 的色 素 沉 着 区 域 , 图 1 如 所 示 。虹 膜识 别具 有 普 遍性 、 一 性 、 定 性 、 保 护 性 、 入 侵 唯 稳 受 非 检测 性 和防伪 性 等优 点 。非 入 侵 检 测 性 ( 或非 接 触 式 ) 的生 物 特 征 识 别是 身 份鉴别 研 究 与应 用 发 展 的必 然 趋 势 , 人 脸 、 音 和 与 声
A b t a t I sl a in i a a o e so n a rs r c g to y tm . e s ed a c urc ft e i slcain d cde s r c r oc to s a b s lpr c s i n i n i e o niin s se Th pe nd a c a y o h r o to e i i i i t e p f r a c ft rsr c g iin s se . n o de o f se he s e fi sl c to t i p ri r d e a tlc to l o h erom n e o he i e o nto y t m I r r t a tn t pe d o r o ai n,h spa e nto uc sa fs o a in a g — i i i h frpu l e e tn a e n t e g o ti a h r ce tco ice. i gt e c u i r l t rt m o pi d t ci g b s d o h e merc lc a a trsi fcr l Usn h o pl e ains i e we n t n ra d o e i ng o h p b t e hei ne n utr e g s o h rs i a e,he s a c a e o ac l t o o lc t utrb un a e sg e ty r du e Ex e me t ho t tt d e ft e i m g t e r h r ng fc lu usme h d t o ae o e o d r s i r al e c d. p r i i i ns s w ha he
采用Hough变换定位出虹膜内外边缘的圆心和半径
采用Hough 变换定位出虹膜内外边缘的圆心和半径虹膜包含纹理的部分是内外两个近似圆形边界之间的部分,虹膜的内侧与瞳孔相邻,外侧与眼白相邻,这两个圆不是完全同心的,需要分别对内外两个边界进行处理。
目前国内外提出了不少的虹膜定位算法。
在此具体研究基于Hough 变换的虹膜定位算法。
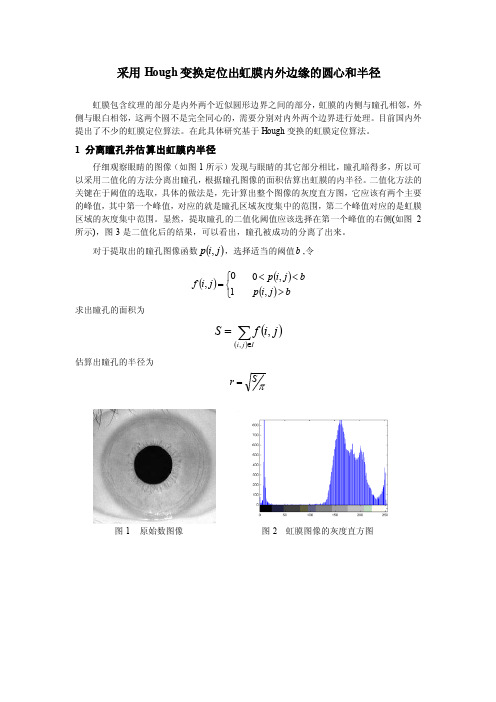
1 分离瞳孔并估算出虹膜内半径仔细观察眼睛的图像(如图1所示)发现与眼睛的其它部分相比,瞳孔暗得多,所以可以采用二值化的方法分离出瞳孔,根据瞳孔图像的面积估算出虹膜的内半径。
二值化方法的关键在于阈值的选取,具体的做法是,先计算出整个图像的灰度直方图,它应该有两个主要的峰值,其中第一个峰值,对应的就是瞳孔区域灰度集中的范围,第二个峰值对应的是虹膜区域的灰度集中范围。
显然,提取瞳孔的二值化阈值应该选择在第一个峰值的右侧(如图2所示),图3是二值化后的结果,可以看出,瞳孔被成功的分离了出来。
对于提取出的瞳孔图像函数()j i p ,,选择适当的阈值b ,令()⎩⎨⎧=10,j i f ()()b j i p b j i p ><<,,0 求出瞳孔的面积为()()∑∈=Ij i j i f S ,, 估算出瞳孔的半径为 πSr =图1 原始数图像 图2 虹膜图像的灰度直方图图3 二值化方法定位瞳孔2 采用改进的Hough 变换算法定位出虹膜内外边缘(一)Hough 变换的原理Hough 变换的实质是将图像空间的具有一定关系的像元进行聚类,寻找能把这些像元用某一解析形式联系起来的参数空间累积对应点。
采用Hough 变换检测任意曲线的原理如下:假设()y x a a f a n n ,,,...,11-= (1)为需检测曲线的参数方程,式中n a a , ... ,1为形状参数,y x ,为空间域的图像点坐标,对于图像空间的任意点()00,y x ,利用(1)式可将其变换为参数空间()n a a ,...,1中的一条曲线。
一种基于形态学的虹膜定位快速算法

Ke o d :r cl a o ; o g g rh ;i u ee c ieet l loi ;e ledtc; a oet n yw r s iso a zt n H uha oi cr mfrn e f rni grh t a eetg yp jco il i i l t m c d aa t m mp t r r i
t l e u t s o t a ep o o e t o c i v s x e ln s l r f o h s e d a d a c r c r o ai ai n a s l h w t r p s d meh d a h e e c l t e u t i t mso b t e n c u a y f c l t . r s h t h e e r sn e p o l z o
S h o f mp tra d T lc mm u ia i n , a g h i e st f c e c n e h o o y Ch n s a4 0 1 , i a c o l Co u e n ee o o n c t s Ch n s aUn v r i o S in ea dT c n l g , a g h 1 1 4 Ch n o y PENG i n XI J a , ANG u Fa t rsl c l a i n a g r t m a e n m o p o o y Co J n. s i ai to l o ih b s d o r h l g . mp t r En i e rn n p i a i n , 0 2, i o z u e g n e i g a d Ap l to s 2 1 c
tre yeei, y l hadfu a,oai t nw t w— eda dlw ac r y ec Ie ly rypoet nag rh admo- ub db yl eea cllcl ai i l s e cua ,t.t mpo s a r ci l i m t d s n a z o ho p n o c g j o ot n
一种快速而精确的虹膜定位方法
( 2 : 8 .8 . 1 ) 1 31 5
Abs r c :The k y se t o tu tt y t m f a t m a i rs r c g to i w o l a e t e ii u c l T tat e tp o c nsr c he s se o u o tc ii e o nቤተ መጻሕፍቲ ባይዱ n sho t oc t h rs q i k y o i
法 。其 中虹膜 识别 由于具有惟 一性 、 普遍性 、 定 稳 性 、 保护性 、 受 可采集 性和防伪性 好等优点 , 必然会 成为 未 来社 会 的主 流生 物认 证技 术 。 在虹膜识别技术 中, 虹膜定位是最关键的一环 ,
Ke ywor s:ii oc to g a a bl c ; o e ti v i n s d rsl a i n; r y me n; o k m m n n a a t r
摘
要: 快速 虹 膜 定 位是 实现 虹膜 自动 识 别 系统 的基 础 。从 虹膜 图像 特 点 出发 , 出了基 于分 块 统计 灰 度 平 提
均值 的方法来确定虹膜 内圆圆心和半径。利用不变矩的识别方法, 不需要对任何 带估参数进行 累积计数 , 就 可快速求 出外边缘的参数 , 算量小, 算时间短 。通过对中科院 自动化所 C SA虹膜数据库 5 组 图像的虹 计 计 AI 0 膜定位测试结果表 明, 该方法定位准确率达到 9%。 5 关键 词 : 虹膜 定位 ; 度平 均 ; ; 变距 灰 块 不
.
a h e e s c o l a c r i g t h h r ce sis o e ii i g , n a g rt m, ih i a e n b o k s t t s c iv u h g a, c o d n o t e c a a t r t f h s ma e a l o i i c t r h wh c s s d o l c t i i b a sc o v r g e , sp o o e o d tr n e c n n a i s o e i si n rcr l . i g m o n v ra t n fa e a e y i r p s d t ee mi e t e  ̄e a d r du f h i e i e Usn me t n a in so h t r n c i e g e i n , h a a ee ss mb l ft e i s o tr cr l a e r c g ie o v n e t n u c l , v i i g d e r g o s t e p r m t r y o s o r u e ice c n b e o n z d c n e in l a d q i k y a o dn h i y t e u e o c u lt d c u t f n a a t r . g rt msp o o e i a e a e b e i l td O 0 s t h s fa c mu ae o n y p r me e s Al o i o a h r p s d i t sp p rh v e n smu a e n 5 es n h o g sfo CAS A i g aa a ea d t e l c t g a c r t t p t 5 . f ma e m i r I i si r ma ed t b s n ai c u a er ei u 9 % h o n a s o
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
n a c c u r a t e i r i s l o c a t i o n me t h o d
Wa n g Ya n ni a n Z h a o La n g y u e Li u Hu i mi n
理 论 与 方 法
己 口I 7 年 l 1 月 第] 6 卷 第 J 定 位 方 法
王延 年 赵 朗月 刘会敏 ( 西安工程大学电子信息学院 西安 7 1 . 0 0 4 8 )
摘
要: 虹 膜 定 位 是 虹 膜 识 别 中极 为关 键 的 一 步 , 选 择 了一 种 基 元 模 式 来 进 行 虹 膜 内边 缘 定 位 。为 了 使 提 取 的 内 边 缘 更 加 精
确, 先 对 采 集 的 虹膜 图像 进行 除燥 去 、 光斑 、 归一化等处理 , 再 设 定 方 窗 函数 及 双 阈值 , 来定义 基元模式 , 通 过 基 元 模 式 提 取 虹 膜 内 边 缘 纹 理 信 息 进 行 边 缘 定 位 。最 后 选 取 了 C AS I A — I r i s , UB I R I S - V1 和 MMu I r i s V1 虹 膜 数 据 库 中虹 膜 图像 在 MATL AB 2 0 1 0 b 上与 D a u g ma n和 W i d e s两种 算 法 进 行 性 能 测试 , 实验证 明, 此方法准确率很高 , 耗 时较 短 , 可 以 有 效 精 确 定 位 虹 膜 内 边 缘, 具 有 较 好 的应 用 价值 。 关键词 : 基 元 模 式 ;方 窗 函 数 ;双 阈值 ; 虹 膜 内边 缘
t e x t u r e i n f o r ma t i o n f o r e d g e l o c a t i o n . Fi n a l l y, t h e i r i s i ma g e s o f CASI A— I r i s, UBI RI S — V1 a n d M M U— I r i s V1 i r i s
Ke y wo r d s :p r i mi t i v e mo d e ;s q u a r e wi n d o w f u n c t i o n;d o u b l e t h r e s h o l d;i r i s i n n e r e d g e
0 引 言
t h i s me t h o d wa s v e r y a c c u r a t e a n d t i me — c o ns u mi n g. The p r e c i s e p o s i t i o n i n g o f t he i n ne r e d g e o f t he i r i s h a s a go o d a p p l i c a t i o n v a l u e .
随着 科 技 的发 展 , 生 物 识 别 技 术 得 到 了充 分 的 发
1 i g h t a n d n o r ma l i z e d 。t h e n t h e wi n d o w f u n c t i o n a n d t h e d o u b l e t h r e s h o l d we r e s e t t o d e f i n e t he p r i mi t i v e mo d e 1 . Ed g e
d a t a b a s e we r e s e l e c t e d a n d t e s t e d o n t he M AT LAB201 0 b wi t h Da u g ma n a n d Wi d e s . Th e e x p e r i me n t p r o v e d t h a t
( Co l l e ge of El e c t r o ni c I nf or ma t i on Xi ’ a n Po l y t e c hn i c U ni v e r s i t y。 Xi ’ a n 71 0 04 8.Ch i n a)
Ab s t r a c t :I r i s l o c a t i o n i s a v e r y c r i t i c a l s t e p i n i r i s r e c o g n i t i o n .I n t h i s p a p e r , we c h o s e a p r i mi t i v e mo d e l t O l o c a t e t h e i n n e r e d g e o f t h e i r i s .I n o r d e r t o ma k e t h e e x t r a c t e d i n n e r e d g e mo r e a c c u r a t e ,t h e i r i s i ma g e o f t h e c o l l e c t e d i ma g e wa s d i v i d e d i n t o