通过串口控制电机转速
普通PC通过USB转485串口ModBus-RTU通信协议控制伺服电机

普通PC通过USB转485串⼝ModBus-RTU通信协议控制伺服电机RS485通信RS485 是半双⼯通信(2 线制),可以⼀点对多点进⾏组⽹,⽽且 RS485 是⽤缆线两端的电压差值来表⽰传递信号,这与 RS232 电⽓特性⼤不⼀样。
RS485 仅仅规定了接收端和发送端的电⽓特性,并没有规定或推荐任何数据协议RS485 采⽤两根通信线,通常⽤ A 和 B 或者 D+和 D-来表⽰。
逻辑“1”以两线之间的电压差为+(0.2~6)V 表⽰,逻辑“0”以两线间的电压差为-(0.2~6)V 来表⽰,是⼀种典型的差分通信,电平与 TTL 电平兼容,可⽅便与 TTL 电路连接。
优点:1. RS485的接⼝信号电平⽐RS231-C低,不易损坏接⼝电路的芯⽚,且该电平与TTL电平兼容,⽅便于TTL电路相连接。
2. RS485的数据最⾼传输速率为10Mbps。
其平衡双绞线的长度与传输速率呈反⽐,在100kbps速率下,才可能使⽤规定的最长电缆长度,只有在很短的距离下才能获得最⾼传输速率。
3. RS485接⼝采⽤平衡驱动器和差分接收器的组合,抗共模⼲扰能⼒强,即抗噪声⼲扰性好,因⽽通信距离远,最⼤传输距离⼤约为1200m,实际可达3000m。
4. RS485接⼝在总线上允许连接多达128个收发器,既具有多站能⼒。
同时需要两个终端电阻,其阻值要求等于传输电缆的特性阻抗。
在短距离300m内传输时可不连接终端电阻。
ModBus-RTU通信协议modbus协议已经成为通⽤⼯业标准,通过协议,控制器与控制器、控制器通过⽹络(以太⽹)与其他设备之间可以实现串⾏通信。
RTU即远程终端单元,消息中每8位包含两个⼗六进制字符。
在相同的波特率下,这种⽅法⽐ASCII⽅式传送的数据量⼤。
2.1.1 图解区2.2 ModBus-RTU详解Modbus ⼀个⼯业上常⽤的通讯协议、⼀种通讯约定。
Modbus协议包括RTU、ASCII、TCP。
单片机控制直流电机的转速

单片机控制直流电机的转速
单片机是一种集成了CPU、RAM、EPROM和GPIO等功能模块的微型计算机系统,广泛应用于控制、测量、仪表以及通讯等领域。
单片机控制直流电机的转速,是基于单片机的数字输出口产生的PWM波控制直流电机的转速。
直流电机是一种广泛应用的电机类型,其结构简单,控制相对容易。
控制直流电机的转速常常使用PWM技术,即变占空比的脉冲宽度调制技术。
PWM波的占空比与电机的转速成正比关系。
通过单片机的数字输出口产生PWM信号,调整占空比,可以控制直流电机的转速。
以下是单片机控制直流电机转速的具体实现步骤:
1.将电机的正极接到电源,负极接到单片机的数字输出口;
2.设置单片机的计时器,产生PWM波,定时器的频率可以根据电机的额定转速和电机的型号进行设置;
3.根据PWM波的占空比控制电机的转速,可以通过编程控制单片机数字输出口的输出电平,从而调整PWM波的占空比,进而改变电机的转速。
值得注意的是,单片机控制电机转速还需要特别考虑电机的供电和保
护措施。
单片机和电机的供电电压需要相同,并且还需要电源电压稳
定器,以保证电机转速的稳定性。
此外,还需要采取适当的保护措施,如反向保护二极管、电机短路保护电路等,以确保电机和单片机的安全。
总之,单片机控制直流电机的转速是一种基于PWM技术的控制方法,通过单片机的数字输出口产生PWM信号,调整占空比,可以实现对
电机的精确控制。
在实际应用中,我们需要根据电机的特性和实际需
要选择合适的单片机型号,并采取适当的保护和供电措施,以确保系
统的安全和稳定性。
用微机串口实现对交流伺服电机的控制
用微机串口实现对交流伺服电机的控制1 引言在自动控制系统中,交流伺服电机的作用是把信号(控制电压或相位)变换成机械位移,也就是把接收到的电信号变为电机的一定转速或角位移。
他具有精度高、低频特性好、额定转速高、速度响应时间短等特点,因而在自动控制系统中得到越来越广泛的应用。
若用微机对交流伺服电机进行控制,现在采用较多的办法是选用现成的运动控制卡。
微机通过对与控制卡配套的接口板通信,进而实现对电机的控制。
这种控制简单可靠,但在一些对系统各轴联动要求不高的场合,选用现成的控制卡略显浪费(控制卡价格在万元左右)。
下面介绍一种控制方法,他可以较低成本实现对伺服电机的控制。
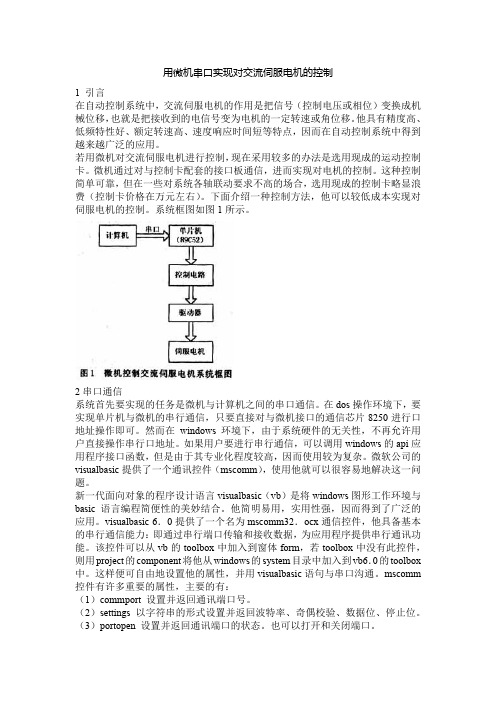
系统框图如图1所示。
2串口通信系统首先要实现的任务是微机与计算机之间的串口通信。
在dos操作环境下,要实现单片机与微机的串行通信,只要直接对与微机接口的通信芯片8250进行口地址操作即可。
然而在windows环境下,由于系统硬件的无关性,不再允许用户直接操作串行口地址。
如果用户要进行串行通信,可以调用windows的api应用程序接口函数,但是由于其专业化程度较高,因而使用较为复杂。
微软公司的visualbasic提供了一个通讯控件(mscomm),使用他就可以很容易地解决这一问题。
新一代面向对象的程序设计语言visualbasic(vb)是将windows图形工作环境与basic语言编程简便性的美妙结合。
他简明易用,实用性强,因而得到了广泛的应用。
visualbasic 6.0提供了一个名为mscomm32.ocx通信控件,他具备基本的串行通信能力:即通过串行端口传输和接收数据,为应用程序提供串行通讯功能。
该控件可以从vb的toolbox中加入到窗体form,若toolbox中没有此控件,则用project的component将他从windows的system目录中加入到vb6.0的toolbox 中。
这样便可自由地设置他的属性,并用visualbasic语句与串口沟通。
串口变频控制器说明书

串口变频控制器说明书一、引言串口变频控制器是一种用于控制电机转速的设备。
它通过串口通信接口与电机相连接,通过发送特定的指令和参数,实现对电机转速的调节和控制。
本说明书旨在详细介绍串口变频控制器的功能、使用方法和注意事项,以帮助用户正确使用该设备。
二、功能1. 转速调节:串口变频控制器可以实现对电机的转速进行连续调节,根据不同的需求,可以将电机转速调节到合适的范围。
2. 启停控制:通过发送特定的指令,用户可以实现对电机的启动和停止控制,方便进行各种操作。
3. 保护功能:串口变频控制器具备过流、过压、欠压等保护功能,可以保证电机在工作过程中的安全性。
4. 通信功能:串口变频控制器支持串口通信,用户可以通过串口与其他设备进行数据传输和控制指令的发送。
三、使用方法1. 连接电路:首先,将串口变频控制器的串口接口与电机相连接,确保连接牢固、正确。
然后,将电源线连接到控制器的电源接口,接通电源。
2. 设置参数:在使用串口变频控制器之前,需要根据实际情况设置一些参数,如电机额定功率、额定电压等。
用户可以参考控制器的说明书进行设置。
3. 发送指令:通过串口工具软件,用户可以发送控制指令和参数给串口变频控制器,实现对电机的控制。
指令的格式和具体含义可以参考控制器的说明书。
4. 转速调节:通过发送不同的指令和参数,用户可以实现对电机转速的调节。
可以根据实际需求,逐步调整转速,直至达到所需的效果。
四、注意事项1. 使用前请仔细阅读说明书,了解控制器的功能和使用方法,确保正确操作。
2. 请按照要求正确连接电路,确保连接牢固可靠,避免不必要的损坏。
3. 在使用过程中,应注意控制器的工作温度范围,避免超过规定范围,以免影响正常使用。
4. 当控制器出现故障或异常情况时,请及时停止使用,并联系售后服务人员进行维修和处理。
5. 请勿私自拆卸或改装控制器,以免造成损坏或安全隐患。
6. 使用过程中应避免与水或潮湿环境接触,防止发生电气故障。
串口电机的单片机调速程序

串口电机的单片机调速程序串口电机是一种常见的电机类型,具有快速反应、单向转动、精度高等特点,因此被广泛应用于自动化控制、机器人控制等领域。
在实际应用中,需要通过单片机对串口电机进行调速,实现更加精准的控制。
本文将介绍串口电机的单片机调速程序,希望对广大读者有所启发和帮助。
一、串口电机的工作原理串口电机的基本工作原理是通过串口通信方式传递指令来控制电机的转速和方向。
具体来说,电机的速度和方向由输入的指令决定,指令中包含有具体的速度和方向信息,通过串口通信传递给电机控制器进行处理,最终控制电机的转速和方向。
二、单片机调速程序的设计流程1.硬件连接首先需要将单片机与串口电机连接,具体连接方式根据电机型号和单片机型号不同而异,一般需要连接引脚和电源等。
连接完成后,需要在单片机上配置串口通信参数,包括波特率、数据位、停止位等。
2.初始化程序初始化程序是单片机控制串口电机的第一步,需要设置串口通信模块,包括波特率、数据位、停止位,同时还需要设置单片机的输出口,将其设置为控制电机的输出口。
初始化程序的主要作用是将单片机和串口电机之间的通信配置好,为后续的操作打下基础。
3.读取输入指令在此步骤中,单片机需要接收外部传来的指令,并进行解析和处理。
一般情况下,指令包括控制电机转速和方向的信息,需要进行提取和分离。
在读取指令的同时,需要判断指令是否有效,否则不进行下一步处理。
4.转速控制功能实现转速控制功能是单片机调速程序的核心功能,需要根据外部输入的指令,控制电机的转速。
一般情况下,转速控制函数包括速度模式、位置模式、加速度和减速度控制等多种模式,根据具体需求选择不同的模式。
5.调试程序完成程序的编写后,需要进行测试和调试,确认程序能够实现预期的控制效果。
在调试过程中,需要注意单片机和串口电机之间的通信是否正常,指令是否能够正确解析和控制电机的转速和方向等问题。
三、总结本文介绍了串口电机的单片机调速程序的设计流程,涵盖了硬件连接、初始化程序、读取输入指令、转速控制功能实现和调试程序等多个方面。
串口调试助手控制步进电机正反转
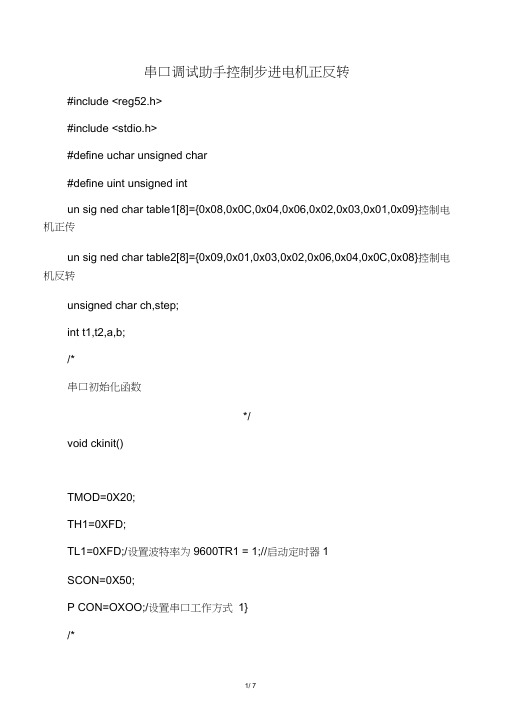
串口调试助手控制步进电机正反转#include <reg52.h>#include <stdio.h>#define uchar unsigned char#define uint unsigned intun sig ned char table1[8]={0x08,0x0C,0x04,0x06,0x02,0x03,0x01,0x09}控制电机正传un sig ned char table2[8]={0x09,0x01,0x03,0x02,0x06,0x04,0x0C,0x08}控制电机反转unsigned char ch,step;int t1,t2,a,b;/*串口初始化函数*/void ckinit()TMOD=0X20;TH1=0XFD;TL1=0XFD;/设置波特率为9600TR1 = 1;//启动定时器1SCON=0X50;P CON=OXOO;/设置串口工作方式1}/*控制字符接收函数*/ void SCI_Rev()伸口接收数据uint i=0;while(RI){ch=SBUF;a=ch-96;b=ch-64;RI=0;/*电机延时函数*/ void delay(int n){int i,j;// 延时0.999ms*n12MHZ 晶振for(i=0;i<n;i++){for(j=0;j<120;j++)/*电机正转函数*/ void forward1(){for(t1=512*a;t1>0;t1--){for(step=0;step<8;step++){P1=table1[step];delay(2);if(RI)t1=0;/*电机反转函数*/ void backward1(){for(t2=512*b;t2>0;t2--){for(step=0;step<8;step++){P1=table2[step];if(RI)t2=0;/*电机停止函数*/ void stop(){P1=0xff;delay(100);/*主函数*/ void main(){ckinit();while(1){SCI_Rev();switch(ch){forward1(); ch=0; break;case'b': forward1(); ch=0; break;case'c': forward1(); ch=0; break;case'd': forward1(); ch=0; break;case'A': backward1(); ch=0; break;case'B': backward1(); ch=0; break;backward1(); ch=0; break;case'D': backward1(); ch=0;break;// 正转1 圈// 正转2 圈// 正转3 圈// 正转4 圈// 反转1 圈// 反转2 圈// 反转3 圈// 反转4 圈case'0':stop(); break; default: break;P1=0;}// 停止电机。
如何控制串口舵机转速

如何控制串口舵机转速章节一:引言(约200字)串口舵机是一种常见的控制装置,可通过串行通信接口与计算机或其他设备进行通信。
控制串口舵机的转速对于实现精确的位置控制非常重要。
本论文旨在探讨如何通过串口通信控制舵机的转速,为读者提供一种实用的方法。
章节二:相关技术介绍(约300字)首先,我们需要了解舵机的基本原理。
舵机由电机、减速器和位置反馈装置组成。
减速器减小了电机的转速,使得舵机可以更精确地控制位置。
位置反馈装置可以告诉舵机当前的位置。
其次,我们需要熟悉串口通信的原理。
通常,串口通信是通过发送和接收数据来实现的。
数据以字节的形式在串口之间传输。
通过控制发送的指令,我们可以实现对舵机的转速控制。
章节三:串口舵机转速控制方法(约300字)在控制串口舵机转速时,我们可以通过发送不同的指令来实现。
首先,我们需要将舵机连接到计算机,并确定串口的配置参数,如波特率、数据位、校验位等。
之后,我们可以通过发送不同的指令来控制舵机的转速。
一种常见的方法是使用PWM(脉冲宽度调制)信号来控制舵机的转速。
通过改变PWM信号的占空比,我们可以改变舵机的转速。
另外一种方法是发送控制指令来控制舵机的转速。
通过发送不同的指令,我们可以实现舵机的不同转速。
这需要编写相应的控制程序,根据不同的指令来改变舵机的转速。
章节四:实验结果与分析(约200字)为验证上述方法的有效性,我们进行了实验。
通过改变PWM 信号的占空比,我们成功地控制了舵机的转速。
通过发送不同的控制指令,我们也成功地改变了舵机的转速。
通过实验结果可以得出结论:控制串口舵机转速是可行且有效的。
我们可以通过发送不同的指令或改变PWM信号的占空比来实现精确的转速控制。
综上所述,本论文讨论了如何通过串口通信控制舵机的转速。
通过之前的相关技术介绍,我们了解到了舵机和串口通信的基本原理。
然后,我们介绍了控制串口舵机转速的方法,包括使用PWM信号和发送控制指令。
最后,通过实验验证了这些方法的有效性。
串口控制步进机
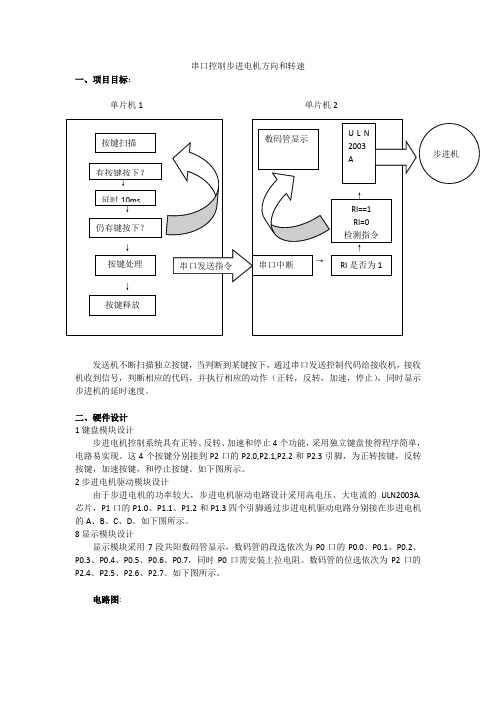
串口控制步进电机方向和转速一、项目目标:单片机1 单片机2发送机不断扫描独立按键,当判断到某键按下,通过串口发送控制代码给接收机,接收机收到信号,判断相应的代码,并执行相应的动作(正转,反转,加速,停止),同时显示步进机的延时速度。
二、硬件设计1键盘模块设计步进电机控制系统具有正转、反转、加速和停止4个功能,采用独立键盘使得程序简单,电路易实现。
这4个按键分别接到P2口的P2.0,P2.1,P2.2和P2.3引脚,为正转按键,反转按键,加速按键,和停止按键。
如下图所示。
2步进电机驱动模块设计由于步进电机的功率较大,步进电机驱动电路设计采用高电压、大电流的ULN2003A.芯片,P1口的P1.0、P1.1、P1.2和P1.3四个引脚通过步进电机驱动电路分别接在步进电机的A、B、C、D。
如下图所示。
8显示模块设计显示模块采用7段共阳数码管显示,数码管的段选依次为P0口的P0.0、P0.1、P0.2、P0.3、P0.4、P0.5、P0.6、P0.7,同时P0口需安装上拉电阻。
数码管的位选依次为P2口的P2.4、P2.5、P2.6、P2.7。
如下图所示。
电路图:三、程序设计单片机1 单片机2C语言程序:(1)发送机程序:#include<reg52.h>#define uint unsigned int#define uchar unsigned charsbit key0=P2^0;sbit key1=P2^1;sbit key2=P2^2;sbit key3=P2^3;//独立按键定义void delay()//消抖子程序{uchar a;for(a=0;a<200;a++);}void trans()//代码发送子程序{key0=1;if(key0==0);delay();if(key0==0) { SBUF=0x00;while(!TI);TI=0;}while(!key0);key1=1;if(key1==0);delay();if(key1==0) {SBUF=0xff;while(!TI);TI=0;}while(!key1);key2=1;if(key2==0);delay();if(key2==0) {SBUF=0xfe;while(!TI);TI=0;}while(!key2);key3=1;if(key3==0);delay();if(key3==0) { SBUF=0xfd;while(!TI);TI=0;}while(!key3);}void main(){TMOD=0x20;//选择工作方式为T1:工作方式2 自动重装初值8位计数器TH1=0xE7;TL1=0xE7;//设置波特率为625bpsTR1=1;//开T1中断IE=0X90;//开串口中断,开总中断IP=0X02;//设置串口中断为高优先级0x10//设置T0中断为高优先级0X02SCON=0X40;//设置串口为方式1,不允许串口接收while(1){trans();}}(2)接收机程序#include<reg52.h>//头文件unsigned char step[]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09};//步进机工作方式为四相八拍unsigned char table[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xa4,0x8e,0xbf};//0-9加Z,F,----显示void delay()//延时子程序{unsigned char i,o;for(o=0;o<20;o++)for(i=0;i<200;i++);}void delayc()//长延时{unsigned char i,o;for(o=0;o<250;o++)for(i=0;i<250;i++);}unsigned char k,zhi,getzhi;unsigned int temp,aa,l; //定义变量void xianshi();void main(){TMOD=0X20; //工作方式2TH1=0XE7;TL1=0XE7; //设置波特率为625bpsTR1=1; //开T1中断IE=0X90;//开总中断,开串口SCON=0X50;//设置串口工作方式1 ,允许串口接收temp=300;//设置初始变量while(1){aa=temp;if(zhi==1){for(k=0;k<8;k++){P1=step[k];for(l=0;l<aa;l++);}}//当接收到0x00时执行正转if(zhi==3){for(k=0;k<8;k++){P1=step[8-k];for(l=0;l<aa;l++);}}//当接收到0xff时执行反转if(zhi==5){P1=0XFF;}//停止延时时间根据接收到0xfe的次数每次加20;满3000,清零xianshi();//显示}}void xianshi()//显示子程序{P2=0X80;P0=table[temp%10];//个位delay();P2=0X40;P0=table[temp/10%10];//十位delay();P2=0X20;P0=table[temp/100%10];//百位delay();P2=0X10;P0=table[temp/1000];//千位delay();}void recevied() interrupt 4 //接收程序{if(RI==1){RI=0;getzhi=SBUF;if(getzhi==0x00){P0=table[10];P2=0x8f;delayc();zhi=1;}//接收到0x00数码管显示Z,赋值执行正转if(getzhi==0xff){P0=table[11];P2=0x8f;delayc();zhi=3;}//接收到0xff数码管显示F,赋值执行反转if(getzhi==0xfe){temp=temp+30;if(temp==3000){temp=0;}}//接收到0xfe,每接收到一次,延时加30,加到3000重新赋值if(getzhi==0xfd){P0=table[12];P2=0xff;delayc();zhi=5;}//接收到0xfd数码管显示----,赋值执行停止}}四、调试1、按设计的电路图接线,启动KEIL3分别建立两个工程项目,把相应程序拷贝进去,设置好参数,编译。
通过串口控制电机转速

精心整理嵌入式原理考查项目报告题目通过串口控制电机转速通过串口控制电机转速吴赵崧林1、项目要求:串口发送SPEED0,电机停止;2个脉冲的间隔越短,步进电机就转得越快。
调整输送给步进电机的脉冲频率,就可以对步进电机进行调速。
3、程序流程图进行s3c2410初始化ARMTargetInit()进行电机初始化init_MotorPort();switch(x)//x的值由usb()提供出来;{case0:SetPWM(0);break;//停止转动case1:SetPWM(500);break;//电机低速运转;case2:SetPWM(700);break;//电机中等速度运转;case3:SetPWM(900);break;//电机高等速度运转;default:break;//默认处理方式}}}usb.h的代码:if(strcmp(table0,table)==0)//将接收到的数值和已存在的数值相比较{for(j=0;j<6;j++){Uart_SendByten(0,table0[j]);//如果相同,输出table1}{Uart_SendByten(0,table2[j]);//如果相同,输出table3}for(j=0;j<6;j++){table[j]='\0';//将接受的的数据清零}x=2;//电机中速转动标志位i=0;break;//跳出循环}elseif(strcmp(table3,table)==0)//接收到的数值和已存在的数值相比较{for(j=0;j<6;j++){Uart_SendByten(0,table3[j]);}//如果相同,输出table2这是输入‘SPEED2’时的截图照片6、项目总结我们这次选择的是通过‘串口控制电机转速’这个实验。
我通过本次试验我学到了好多东西,虽说用的时间很长但是感觉还是挺好—-有一种收获的感觉。
这次实验里面我全面的知道了步进电机用串口控制的方法,还有就是这次实验里面涉及。
串口通信控制电机方法

串口通信控制电机方法串口通信控制电机通常涉及将控制命令通过串口发送到与电机控制相关的设备,这可能是一个微控制器、单片机或专用的电机控制器。
以下是一般的步骤和考虑事项:1. 选择串口通信协议:定义好串口通信的协议,包括数据帧格式、命令结构、起始和停止位等。
常见的串口通信协议包括UART,RS-232,RS-485等。
确保发送和接收端都按照相同的协议进行配置。
2. 编写控制程序:在电机控制设备上编写一个程序,该程序能够接收串口数据并解析控制命令。
这可能需要使用编程语言(例如C、C++、Python等),具体取决于你的控制设备。
3. 定义控制命令:定义一套控制命令,这些命令将触发电机的不同操作,例如启动、停止、改变速度或方向等。
确保这些命令在协议中有清晰的表示,并且控制设备能够正确地解释它们。
4. 串口通信设置:在控制设备和电机之间设置串口通信。
这可能包括波特率、数据位、停止位等参数的配置。
确保这些设置在发送和接收端是一致的。
5. 实现控制逻辑:在控制程序中实现电机的控制逻辑。
这可能包括使用PWM信号来调整电机的速度,控制电机的方向,处理启动和停止命令等。
6. 错误处理:考虑在串口通信中的错误处理机制。
例如,校验和检查、超时处理等。
这可以提高系统的稳定性和容错性。
7. 测试和调试:在实际的硬件上进行测试,并进行调试。
确保串口通信稳定,控制命令被正确解释,电机能够按预期进行操作。
请注意,具体的实现可能会因电机类型、控制器型号、编程语言和硬件平台而异。
在实际的项目中,你可能还需要查阅电机和控制器的技术文档以获取更详细的信息。
基于串口的发动机远程控制网络通信调速系统

框 , 来 设 置 串 口号 , 特 率 , 偶 校 验 。 三 个 编 辑 框 中输 人 数 有 波 奇 在 据 后 以后 ,单 击 OK按 钮 ,这 时设 置 菜 单 的 响 应 函数 想 继 续 执 行 , 操 作 者 所 设 置 的 串 口号 , 特 率 , 偶 校 验 发 送 到 单 文 档 将 波 奇
加 命 令 响应 函数 , 些 消 息 都 由视 类 C o i 捕 捉 , 设 置 这 C mVe w 在
主控 计 算 机 通 过 局域 网 和 客 户 机 相 连 。
变频 器设置 为外 部端 子控 制模 式 ,并通 过端 子 R R 、 H、 M R 、E L R X信 号 的组 合 达 到 十 五 级 的频 率 输 出 ,将 变 频 器 的 正 转
本 文 开 发 了 一 种 集 成 了 串 口通 信 和 网 络 通 信 的 远 程 控 制 通 信 调 速 系统 , 制 对 象 是 变 频 器 。 控
1 系统 组成 及 工 作原 理 本系统 主要涡 浆一 5航 空 发 动 机 , 8 V三 项 异 步 交 流 电动 30 机 , 菱 D7 0变 频 器 , 门 子 继 电器 式 可 编 程 逻 辑 控 制 器 , 三 0 西 主
提 供 了 CS c e 类 , 封 装 了 W id w o k t A I支 持 异 o kt 它 n o s S c es P , 步 操 作 , 化 了 S c e 编 程 , 低 了编 程 难 度 。 简 o kt 降
主控 端 应 用 程 序 例 程 : 主控 端 应 用 程 序 是 基 于 MF 生 成 的 单 文 档 应 用 程 序 , 原 C 在
180W大功率直流电机驱动器串口(485)通讯控制电机接线方法及运用
如何用串口(485)通讯控制方式控制电机正反转、正反转限位?电机作为各种机械的动力来源。
用途众多,应用广泛。
大至重型工业,小至小型玩具都有其踪迹。
在日常使用中需要对电机的正反转、正反转限位,可以说电机在广泛使应用于各大行业。
例如行车、木工用的电刨床、台钻、刻丝机、甩干机、车床等。
本文以直流电机驱动器驱动直流电机为例,讲述如何用串口(485)通讯控制方式控制直流电机正反转、正反转限位。
串口(485)通讯控制方式控制电机,广泛应用于玩具、小车、机器人等项目,通过串口预设正反转速度,可以灵活控制小车等电机正反转速度,用两个限位开关控制电机的正反转限位,控制方式简便、安全可靠,方便维护。
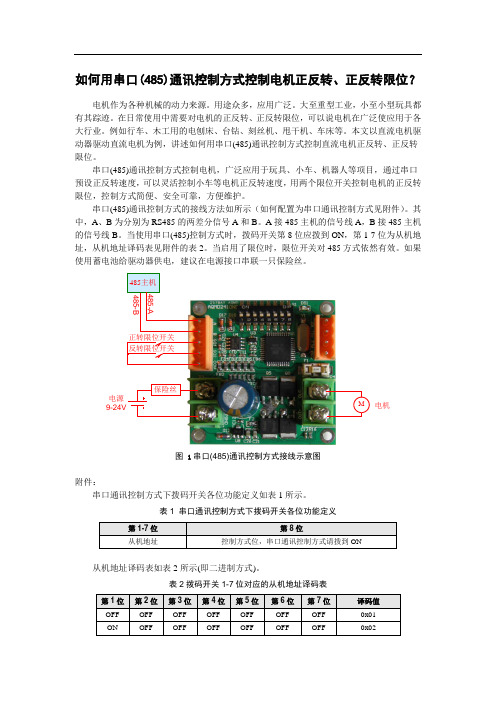
串口(485)通讯控制方式的接线方法如所示(如何配置为串口通讯控制方式见附件)。
其中,A 、B 为分别为RS485的两差分信号A 和B 。
A 接485主机的信号线A ,B 接485主机的信号线B 。
当使用串口(485)控制方式时,拨码开关第8位应拨到ON ,第1-7位为从机地址,从机地址译码表见附件的表2。
当启用了限位时,限位开关对485方式依然有效。
如果使用蓄电池给驱动器供电,建议在电源接口串联一只保险丝。
反转限位开关M电机电源9-24V 保险丝485主机485-B485-A图 1串口(485)通讯控制方式接线示意图附件:串口通讯控制方式下拨码开关各位功能定义如表1所示。
表1 串口通讯控制方式下拨码开关各位功能定义从机地址译码表如表2所示(即二进制方式)。
表2拨码开关1-7位对应的从机地址译码表此驱动器通过串口(485)通讯控制方式控制电机,广泛应用于玩具、小车、机器人等项目,通过串口控制正反转速度,可以灵活控制小车等电机正反转、正反转限位,控制方式简便、安全可靠,方便维护,操作方便。
下图为该款有刷直流电机驱动器正面:。
异步串口通信控制直流电机实验

DSP课程大作业综合设计报告(2011年春季学期)课程名称:DSP技术题目:异步串口通信控制直流电机实验专业班级:学生姓名:学号:指导教师:成绩:年月日一、实验题目:异步串口通信控制直流电机实验二、实验目的:1.了解ICETEK-VC5509-A评估板上扩展标准RS-232串口通信接口的原理和方法。
2.学会对串口通信芯片的配置编程3.学习设计异步通信程序。
4.学习用C语言编制中断程序,控制VC5509 DSP的通用I/O管脚产生不同占空比的PWM信号。
5.学习VC5509DSP的McBSP的通用I/O管脚的控制方法。
6.学习直流电机的控制原理和控制方法。
三、实验设备:计算机,ICETEK-VC5509-A实验箱。
四、实验原理:1.TL16C550异步串行通信收发器TL16C550是一个标准的串口芯片,它的控制寄存器基地址为0x400200,寄存器占用TMS320VC5509的8个地址单元。
串口中断与TMS320VC5509的INT0连接。
用户可以使用TMS320VC5509的中断0响应串口中断。
TL16C550有11个寄存器,这11个寄存器是通过TMS320VC5509的3个地址线(A3~A1)和线路控制寄存器中的DLAB位对它们进行寻址的。
TL16C550的波特率可通过除数寄存器DLM,DLL来设置,除数寄存器值和波特率之间的换算公式如下:除数值=输入频率/(波特率*16),TL16C550的输入频率为:3.6864MHz,波特率和除数之间的关系如表2所示:RS232标准。
4.串口通信接口设置内部生成的串行时钟由系统时钟SYSCLK 频率和波特率选择寄存器决定。
串行通信接口使用16位波特率选择寄存器,数据传输的速度可以被编程65000多种不同的方式。
不同通信模式下的串口通信接口异步波特率由下列方法决定:BRR=1—65535时的串行通信接口异步波特率:串行通信接口异步波特率=SYSCLK/[(BRR+1)*8]其中,BRR= SYSCLK/(SCI 异步波特率*8)-1;BRR=0时的串行通信接口异步波特率:串行通信接口异步波特率=SYSCLK/16这里BRR 等于波特率选择寄存器的16位值。
基于LABVIEW串口通信的电机控制技术

更 好 地 抗 噪 声 ,也 增 加 了可 通 信 设 备 的 数 量 ,最 多 可 达3 2 台 , 同时 增 加 了传 输 的距 离 ,可 靠 传 输
距离为 1 2 0 0 m, 实 际 上 在 3 0 0 0 m左 右 也 可 以正 常
摘
要 :介绍 了以P C 机为上位机 ,以变频器为下位机来驱 动电机的控制模式下 ,在L A B V I E W环境 中对 R S2 3 2 串 口进行 编程 ,并将该 串口输出信号转换成 R S 4 8 5 信号 后传 送给变频器 ,实现 了对 电机 的 起动 ,停 止 ,正反 转 ,点 动等的操 作控制 ,同时通过 以一定 的频率对 串口进行读 写 ,实现 了对变频器 运行状 态的实 时查询功 能。整个 系统的用户 界面友 好 ,操作简 单 ,可移 植性强 ,
一
个 串 口转 接卡 。
是VXI p l u g &p l a y 系统 联 盟 最 重 要 的成 果 之 一 ,它 的 目的是 通 过 减 少 系统 的 建 立 时 间 来 提 高 效 率 。 随 着 仪 器 类 型 的不 断 增 加 和 测 试 系统 复 杂化 的提
高 ,人 们 不 希 望 为 每 一 种 硬 件 接 口都 要编 写 不 强
L I U J i a n . h e’ ,ZHAO Yu . d a n 。Z HANG Yu . q i a n g
( 1 . 长春理 工大 学 机 电工程学 院,长春 1 3 0 0 2 2 ;3 . 长春 理工大学 理学院 ,长春 1 3 0 0 2 2 )
是 一种非常有 实用价值和通用性的 电机控制模式 。 关键词 :串 口通信 ;电机 控制 ;L A B V I E W;V I S A 中图分类号 :T P2 7 3 文献标识码 :B 文章编号 :1 0 0 9 -0 1 3 4 ( 2 0 1 3 ) 1 1 ( 下) - o l 3 5 -0 3
基才串口通信的直流电机PID调速系统设计
cnrleua o WM s nlsr l ota dteu pr ahn o u i t nt aheeteoj t edt n yi T e o t glt nP i a,e a p r aaaa s . or i g i s h m ao o v h cv l sh
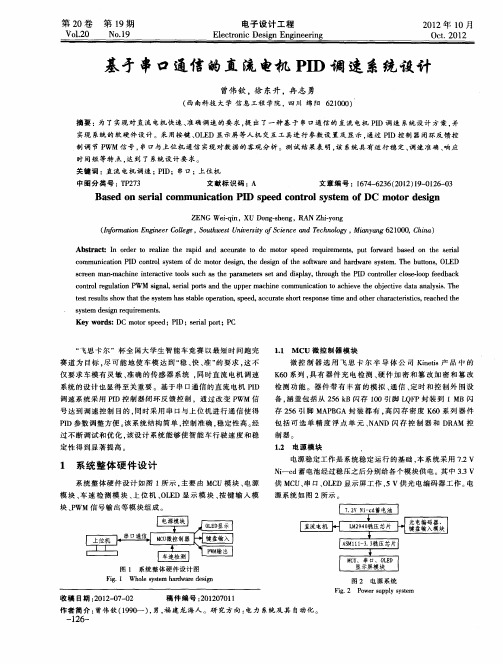
( 南 科技 大 学 信 息 工程 学 院 ,四 川 绵 阳 6 10 ) 西 2 0 0 摘 要 : 了 实现 对 直 流 电机 快 速 、 为 准确 调 速 的要 求 , 出 了一 种 基 于 串 口通 信 的 直 流 电机 PD 调 速 系统 设 计 方 案 。 提 I 并
实现 系统 的 软 硬件 设 计 。采 用按 键 、 L D 显 示屏 等 人 机 交互 工具 进 行 参 数 设 置 及 显 示 . 过 PD控 制 器 闭环 反 馈 控 OE 通 I
(n r ai n i e oe e Suh et n esyo c n eadTc nl y, a y g6 10 , h a I om t nE gn r lg , o t s U i ri f o e C l w v t fS i c n eh o g Mi a 2 0 0 C i ) e o n n n
第2 O卷 第 1 9期
V0 . 0 1 2
No 1 .9
电子设 计工 程
E e to i e i n En i e r g l cr n c D sg gn e i n
21 0 2年 l 0月
0c . t 201 2
基于串口通信的直流电机 P D调速 系统设计 I
曾伟钦 ,徐 东升 ,冉 志勇
制调 节 P WM 信 号 , 口与 上 位 机 通 信 实现 对 数 据 的 客观 分 析 。测 试 结 果 表 明 , 系统 具 有 运 行 稳 定 、 速 准 确 、 应 串 该 调 响 时间 短 等 特 点 . 到 了 系统 设 计 要 求 。 达
基于 Python 串口的三相交流电机控制系统

NEW ENERGY AUTOMOBILE | 新能源汽车时代汽车 基于 Python 串口的三相交流电机控制系统张浩 张三林 石绍兵 李学斌 彭浩西安航空学院 陕西省西安市 710077摘 要: 本文以DSP TMS320F28335为主控芯片,ADC和eQep模块采样的电压、电流以及转速等信号传输给TMS320F28335进行处理,接着TMS320F28335通过串口将数据发送给上位机显示。
同时由Python编程实现的上位机软件也能够在其界面中控制电机的启停、正反转和加减速。
关键词:串口 Python TMS320F28335交流异步电机是一种常用的电动汽车驱动电机,具有调速性能好、成本低、可靠性高等特点。
交流异步电机的控制性能影响着电动汽车的动力和续航里程,对交流异步电机的控制一般采用矢量控制策略。
为了便于新能源汽车专业学生学习交流电机的控制原理,本文面向新能源汽车实验室建设项目,使用上下位机的架构构建了三相异步电机矢量控制平台。
1 系统工作原理使用DSP TMS320F28335对三相异步感应电机进行矢量控制[1-3]。
DSP通过ADC 和eQep模块采样电机驱动板的电压、电流和转速,并将处理得到的信号通过串口发送给上位机。
上位机软件的显示模块负责接收,处理和显示。
而上位机软件的控制模块则负责控制电机的启停,正反转和加减速,将相应指令下发给DSP,DSP处理后再通过ePWM模块给驱动板PWM信号,实现对电机的控制。
2 硬件设计系统硬件原理如图1所示,此系统以TMS320F28335为核心,上位机通过串口通信(协议)下发转速、转矩等控制指令;下位机则通过串口通信将相关物理量状态传输至可视化界面。
3 软件设计3.1 下位机软件设计基于TMS320F28335的主程序流程如图2所示。
系统上电后,经过片上外设的初始化,系统进入死循环,等待中断的发生。
系统采用ePWM定时器来设定下位机软件的控Three-phase AC Motor Control System based on Python Serial PortZhang Hao Zhang Sanlin Shi Shaobing Li Xuebin Peng HaoAbstract: I n this paper,DSP TMS320F28335 is used as the main control chip. The voltage,current and speed signals sampled by ADC and eQep modules are transmitted to the DSP for processing,and then the DSP sends the data to the host computer for display through the serial port. At the same time,the host computer software programmed using Python can also control the start and stop,forward and reverse rotation,acceleration and deceleration of the motor in its interface.Key words:serial port,Python,TMS320F28335图1 系统硬件原理图驱动板故障母线检验SPI通信接口RS232串行通信I/O外扩存储器按键显示屏鼠标键盘树莓派电压驱动UVW三相异步电机eQEPADCePWMINT ADCTMS320F28335控制板电流采样AUTO TIME 9192AUTO TIMENEW ENERGY AUTOMOBILE | 新能源汽车制周期。
串行口控制三相步进电机
用串行口传送数据控制三相步进电机实验说明书0、前言单片机的基础知识与应用单片机又称单片微控制器,它不是完成某一个逻辑功能的芯片,而是把一个计算机系统集成到一个芯片上。
概括的讲,一块芯片就成了一台计算机。
单片机广泛应用于仪器仪表、家用电器、医用设备、航空航天、专用设备的智能化管理及过程控制等领域,大致可分为如下几个范畴:1)在智能仪器仪表的应用单片机具有体积小、功耗低、控制功能强、扩展灵活、微型化和使用方便等优点,广泛应用于仪器仪表中,结合不同类型的传感器,可实现诸如电压、功率、频率、湿度、温度、流量、速度、厚度、角度、长度、硬度、元素、压力等物理量的测量。
采用单片机控制使得仪器仪表数字化、智能化、微型化,且功能比起采用电子或数字电路更加强大。
例如精密的测量设备(功率计,示波器,各种分析仪)。
2)在家用电器中的应用可以这样说,现在的家用电器基本上都采用了单片机控制,从电饭煲、洗衣机、电冰箱、空调机、彩电、其他音响视频器材、再到电子秤量设备,五花八门,无所不在。
3)在工业控制中的应用用单片机可以构成形式多样的控制系统、数据采集系统。
例如工厂流水线的智能化管理,电梯智能化控制、各种报警系统,与计算机联网构成二级控制系统等。
4)在计算机网络和通信领域中的应用现代的单片机普遍具备通信接口,可以很方便地与计算机进行数据通信,为在计算机网络和通信设备间的应用提供了极好的物质条件,现在的通信设备基本上都实现了单片机智能控制,从手机、电话机、小型程控交换机、楼宇自动通信呼叫系统、列车无线通信、再到日常工作中随处可见的移动电话,集群移动通信,无线电对讲机等。
5)单片机在医用设备领域中的应用单片机在医用设备中的用途亦相当广泛,例如医用呼吸机,各种分析仪,监护仪,超声诊断设备及病床呼叫系统等等。
此外,单片机在工商、金融、科研、教育、国防航空等领域都有着十分广泛的用途。
1、课程设计的目的和要求1.1课程设计的目的1.掌握串行口工作方式的程序设计,掌握单片机通讯程序的编制。
单片机串口通信控制步进电机
单片机串口通信控制步进电机这是一个来自单片机开发板的源程序,原理图的下载地址:51hei/f/ks51.pdf下面是源代码:/*************************************************************************************************** * @file main.c * @author xr * @date 2014 年3月18 日20:00:03 * @note 步进电机的参数:减速比:1:64 步进角:5.625/64启动频率:>=550 启动时间最小:1.08ms * @brief 串口通信控制步进电机单片机STC89C52RC MCU 晶振11.0592MHZ************************************************************************************************* */#includetypedef unsigned int uint;typedef unsigned char uchar;typedef unsigned long ulong; //步进电机八拍模式相值编码A-AB-B-BC-C-CD-D-DAuchar code table[] ={0xE, 0xC, 0xD, 0x9, 0xB, 0x3, 0x7, 0x6};uint tmp = 0;bit dir = 0;ulong beats = 0;//拍数uchar angle = 0;//圈数void timer0_Config();void motor_Config(ulong angle);void Uart_Config(uint baud);void main(){timer0_Config();//启动时间设定为2msUart_Config(9600);while (1) {switch (angle){case 2:{motor_Config(2*360);angle = 0;break;}case 3:{motor_Config(3*360);angle = 0;break;}case 4:{motor_Config(4*360);angle = 0;break;}case 5:{motor_Config(5*360);angle = 0;break;}case 6:{motor_Config(6*360);angle = 0;break;}case 7:{motor_Config(7*360);angle = 0;break;}case 8:{motor_Config(8*360);angle = 0;break;}case 9:{P1 |= 0x0F;beats = 0;angle = 0;break;}default:break;}}}tips:感谢大家的阅读,本文由我司收集整编。
一种直接采用计算机串行口控制步进电机新方法
一种直接采用计算机串行口控制步进电机新方法类别:电子综合摘要:介绍了一种计算机串行口经二次开发,用作步进电机控制器的新方法。
计算机通过向串行口发送数据产生控制脉冲,实现对步进电机的控制。
关键词:串行口二次开发控制脉冲步进电机控制器步进电机在数控机床、医疗器械、仪器仪表等自动或半自动设备中得到了广泛应用。
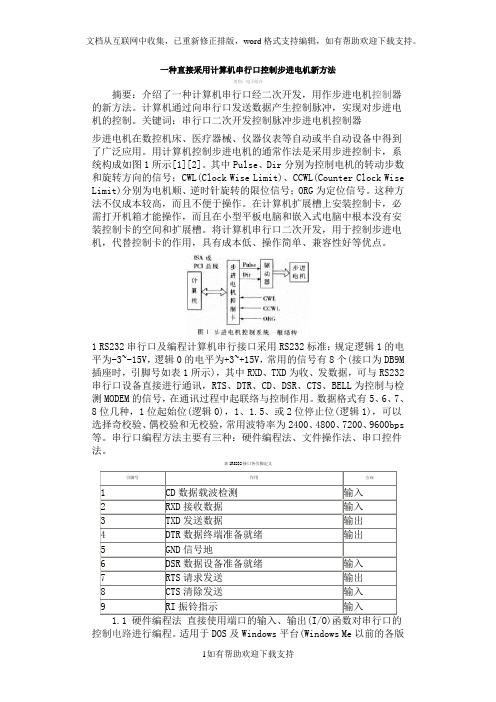
用计算机控制步进电机的通常作法是采用步进控制卡,系统构成如图1所示[1][2]。
其中Pulse、Dir分别为控制电机的转动步数和旋转方向的信号;CWL(Clock Wise Limit)、CCWL(Counter Clock Wise Limit)分别为电机顺、逆时针旋转的限位信号;ORG为定位信号。
这种方法不仅成本较高,而且不便于操作。
在计算机扩展槽上安装控制卡,必需打开机箱才能操作,而且在小型平板电脑和嵌入式电脑中根本没有安装控制卡的空间和扩展槽。
将计算机串行口二次开发,用于控制步进电机,代替控制卡的作用,具有成本低、操作简单、兼容性好等优点。
1 RS232串行口及编程计算机串行接口采用RS232标准:规定逻辑1的电平为-3~-15V,逻辑0的电平为+3~+15V,常用的信号有8个(接口为DB9M 插座时,引脚号如表1所示),其中RXD、TXD为收、发数据,可与RS232串行口设备直接进行通讯,RTS、DTR、CD、DSR、CTS、BELL为控制与检测MODEM的信号,在通讯过程中起联络与控制作用。
数据格式有5、6、7、8位几种,1位起始位(逻辑0),1、1.5、或2位停止位(逻辑1),可以选择奇校验、偶校验和无校验,常用波特率为2400、4800、7200、9600bps 等。
串行口编程方法主要有三种:硬件编程法、文件操作法、串口控件法。
表1RS232接口各引脚定义引脚号作用方向1 CD数据载波检测输入2 RXD接收数据输入3 TXD发送数据输出4 DTR数据终端准备就绪输出5 GND信号地6 DSR数据设备准备就绪输入7 RTS请求发送输出8 CTS清除发送输入9 RI振铃指示输入控制电路进行编程。
RS485直流电机转速控制器

合肥学院计算机科学与技术系课程设计报告2009~2010学年第一学期课程微型计算机原理与接口技术课程设计名称RS485直流电机转速控制器学生姓名阮林佳学号0704012042专业班级07计本(2)班指导教师龙夏老师、何立新老师2010年2月一、题意需求分析及解决方案1、题意需求分析本实验为基于RS485的直流电机转速控制器的设计。
在实验中有俩台PC机,由主机控制从机上直流电机的转速,首先主机通过RS485发出控制命令,连发俩次,而在从机上,从机接受主机发来的控制命令,连续接受俩次后,将命令字进行比较,查看两者是否一致,若两者不一致,则主机,从机停止工作,若两者相同,则从机将继续执行,通过控制直流电机的速度来测调整后的速度并显示出来,最后根据预设的速度值和测得的速度值进行比较,若两者值一样或相差不大(在允许的误差范围内)就说明实验成功。
RS485直流电机转速控制器。
RS485总线上通行的是串行通信协议,可实现双机的串行通信。
数据可在双机或多机的情况下通过把数据送到485总线上实现通信。
在本实验中用到两台PC机和两台试验箱,通过主机把待传送的转速信息送到485总线上,通过RS485总线将转速信息传送给从机。
直流电机由电动机、转子位置传感器和电子开关线路三部分组成。
直流电源通过开关线路向电动机定子绕组供电,电动机转子位置由位置传感器检测并提供信号去触发开关线路中的功率开关元件使之导通或截止,从而控制电动机的转动。
在本实验中需对电机进行调速控制,在调速电路中,主要采用时基电路LM555和脉宽调制器SG1525来完成,LM555用于产生一个占空比一定、且有固定频率的方波信号。
SG1525为单片脉宽调制型控制器芯片,具有输出5.1V 的基准稳压电源,误差放大器、振荡频率在100^ 400kHz范围内的锯齿波振荡器、软启动电路、关闭电路、脉宽调制比较器、RS寄存器以及保护电路等。
电机的控制电压时模拟电压,在如果带输入的是数字电压需将数字电压转化为模拟电压。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
精心整理嵌入式原理考查项目报告
题目通过串口控制电机转速
通过串口控制电机转速
吴赵崧林
1、项目要求:
串口发送SPEED0,电机停止;
2个脉冲的间隔越短,步进电机就转得越快。
调整输送给步进电机的脉冲频率,就可以对步进电机进行调速。
3、程序流程图
进行s3c2410初始化
ARMTargetInit()
进行电机初始化
init_MotorPort();
switch(x)//x的值由usb()提供出来;
{
case0:SetPWM(0);break;//停止转动
case1:SetPWM(500);break;//电机低速运转;case2:SetPWM(700);break;//电机中等速度运转;case3:SetPWM(900);break;//电机高等速度运转;default:break;//默认处理方式
}
}
}
usb.h的代码:
if(strcmp(table0,table)==0)//将接收到的数值和已存在的数值相比较{
for(j=0;j<6;j++)
{
Uart_SendByten(0,table0[j]);//如果相同,输出table1
}
{
Uart_SendByten(0,table2[j]);//如果相同,输出table3
}
for(j=0;j<6;j++)
{
table[j]='\0';//将接受的的数据清零
}
x=2;//电机中速转动标志位
i=0;
break;//跳出循环
}
elseif(strcmp(table3,table)==0)//接收到的数值和已存在的数值相比较{
for(j=0;j<6;j++)
{
Uart_SendByten(0,table3[j]);
}//如果相同,输出table2
这是输入‘SPEED2’时的截图照片
6、项目总结
我们这次选择的是通过‘串口控制电机转速’这个实验。
我通过本次试验我学到了好多东西,虽说用的时间很长但是感觉还是挺好—-有一种收获的感觉。
这次实验里面我全面的知道了步进电机用串口控制的方法,还有就是这次实验里面涉及。