西门子840D G指令精编版
西门子840D G指令概述
840D综合G00快速定位;G01直线插补;G02顺时针圆弧插补;G03逆时针圆弧插补;G04暂停;G09准确停止;G17 XY平面选择;G18 ZX平面选择;G19 YZ平面选择;G20英制指令;G21公制指令;G27返回参考点检查;G28返回参考点;G29返回第二参考点;G30返回第三/四参考点;G40刀具半径补偿取消;G41刀具半径补偿左;G42刀具半径补偿右;G43刀具长度补偿+;G44刀具长度补偿-;G45刀具偏置+;G46刀具偏置-;G47刀具偏置++;G48刀具偏置--;G49刀具长度补偿取消;G52局部坐标系;G53选择机床坐标系;G54~G59预置工件坐标系1~6;G60单向定位;G61准确停止(模态指令);G62拐角减速;G63倍率禁止;G64切削模式;G65宏调用;G66模态宏调用;G73深孔钻循环1;G74攻丝循环(反螺纹);G76镗循环1;G80取消固定循环;G81钻孔循环;G82镗循环2;G83深孔钻循环;G84攻丝循环(正螺纹);G85~G89镗循环3~7;G90绝对值编程;G91增量值编程;G94每分进给;G95每转进给;G98固定循环回起始点;G99固定循环回R点。
M00程序停止;M01可选程序停止;M02程序结束;M03主轴正转;M04主轴反转;M05主轴停止;M06自动刀具交换;M08冷却开;M09冷却关;M29刚性攻丝;M30程序结束并回程序头。
G54G18G90或G91增量。
编程找出点在GO1走直线(这直线是垂直于那个面的线,这个你自己算点)就可以加工了,刀具开始要调整好角度,垂直于那个面。
G17是XY平面G18是zx平面G19是YZ平面这个也比较好办。
比如在G17平面上。
钻孔用的z方向,如果面不平的情况,比如他往x方向倾斜的多少度。
那么钻孔时候走的线应该是斜线(你应该是想做一个垂直于斜面的孔吧)那么你可以先在cad里面画出来,把要钻的那个孔走的那条直线画出来,在找到起始点,坐标值和终点坐标值都找的到,最后就是用G01走出来了,走斜线不是一样走吗.不管在哪个面都一样,不愿计算,就用cad画出来再标出起始点和终点。
SIEMENS840D数控编程
第一讲:基本概念1、西门子系统简介:常见系统有802S/C系统、802D系统、810D系统和840D系统。
其中,西门子802S/C 系统是西门子公司专门针对中国用户开发的一款系统。
目前西门子系统在中国市场得到了广泛的应用,西门子840D更是以高端系统出现。
西门子系统与FANUC系统的比较2、基本概念2.1插补功能:指定刀具沿直线轨迹或圆弧轨迹移动的功能称为插补功能。
它属于准备功能,用G代码后跟若干位数字来表示。
2.2进给功能:用于指定刀具运动速度的功能。
单位为mm/min。
用F指令2.3参考点:一个固定的点,是机床生产商通过行程开关设定的一个特定位置。
在数控操作中所谓的“回零”回的就是此点。
2.4机床原点(零点):即机床坐标系的原点,也是一个固定点。
它是机床制造商在制造、校正机床时设定的一个特殊位置。
2.5坐标系:在数控系统中提到共四个坐标系,即机床坐标系、机床参考坐标系、工件坐标系和编程坐标系。
数控系统中的坐标系均为右手笛卡尔坐标系,如图示:2.5.1机床坐标系:是机床制造商在设计机床时设定的一个坐标系2.5.2机床参考坐标系:是机床生产商通过行程开关设定的一个坐标系2.5.3工件坐标系:为确定工件在机床中的准确位置而建立的一个坐标系,即后面所学到的可设定零点偏置确定的坐标系。
2.5.4编程坐标系:在程序编制过程中,在零件图纸上建立的坐标系2.6主轴功能:用于确定主轴转速的功能,即S指令主轴定位用SPOS=XX格式表示2.7切削速度:切削工件时刀具与工件的相对速度称为切削速度v.S=1000v/Πd其中:S:主轴转速V:切削速度D:刀具直径例:假设用直径φ160mm的刀具,以100m/min的切削速度加工工件,试求其主轴转速?注:进给速度Vf=机床转速n*刀具齿数Z*每齿切削深度fz,单位是毫米/分钟2.8辅助功能:指令机床部件启停操作的功能。
用M指令表示2.9主程序和子程序:2.10准备功能:用来控制刀具(或工作台)运动轨迹的机能。
SIEMENS_840D数控编程
第一讲:基本概念1、西门子系统简介:常见系统有802S/C系统、802D系统、810D系统和840D系统。
其中,西门子802S/C 系统是西门子公司专门针对中国用户开发的一款系统。
目前西门子系统在中国市场得到了广泛的应用,西门子840D更是以高端系统出现。
西门子系统与FANUC系统的比较2、基本概念2.1插补功能:指定刀具沿直线轨迹或圆弧轨迹移动的功能称为插补功能。
它属于准备功能,用G代码后跟若干位数字来表示。
2.2进给功能:用于指定刀具运动速度的功能。
单位为mm/min。
用F指令2.3参考点:一个固定的点,是机床生产商通过行程开关设定的一个特定位置。
在数控操作中所谓的“回零”回的就是此点。
2.4机床原点(零点):即机床坐标系的原点,也是一个固定点。
它是机床制造商在制造、校正机床时设定的一个特殊位置。
2.5坐标系:在数控系统中提到共四个坐标系,即机床坐标系、机床参考坐标系、工件坐标系和编程坐标系。
数控系统中的坐标系均为右手笛卡尔坐标系,如图示:2.5.1机床坐标系:是机床制造商在设计机床时设定的一个坐标系2.5.2机床参考坐标系:是机床生产商通过行程开关设定的一个坐标系2.5.3工件坐标系:为确定工件在机床中的准确位置而建立的一个坐标系,即后面所学到的可设定零点偏置确定的坐标系。
2.5.4编程坐标系:在程序编制过程中,在零件图纸上建立的坐标系2.6主轴功能:用于确定主轴转速的功能,即S指令主轴定位用SPOS=XX格式表示2.7切削速度:切削工件时刀具与工件的相对速度称为切削速度v.S=1000v/Πd其中:S:主轴转速V:切削速度D:刀具直径例:假设用直径φ160mm的刀具,以100m/min的切削速度加工工件,试求其主轴转速?注:进给速度Vf=机床转速n*刀具齿数Z*每齿切削深度fz,单位是毫米/分钟2.8辅助功能:指令机床部件启停操作的功能。
用M指令表示2.9主程序和子程序:2.10准备功能:用来控制刀具(或工作台)运动轨迹的机能。
西门子840d数控编程实例一本通

30RMB本书为工厂内部培训资料,页面为A4大小,市面上没有出售,如有需要请提前预定QQ:574164352旺旺:zhizunzhangdalong说明SINUMERIK 840D 是西门子数控产品的突出代表。
于20世纪90年代推出。
它保持西门子前两代系统SINUMERIK 880和840C的三CPU结构:人机通信CPU(MMC-CPU)、数字控制CPU(NC-CPU)和可编程逻辑控制器CPU(PLC-CPU)。
三部分在功能上既相互分工,又互为支持。
它在复杂的系统平台上,通过系统设定而适于各种控制技术。
SINUMERIK 840D数控系统适用于几乎所有的应用,可实现灵活组网,发挥机床及生产线最大效力,高度开放的HMI和NCK能满足不同客户的个性化需求,无论是各种用户定制画面,还是专有技术、特殊工艺均能轻松与系统无缝连接。
利用完善的SINUMERIK MDynamics (3轴/5轴)铣削工艺包、优异的同步功能,80位浮点数纳米(NANOFP)计算精度、空间补偿系统(VCS)等创新技术的应用使机床性能更胜一筹,实现最佳的加工质量。
可以说西门子系统在中国得到了广泛的运用,尤其SINUMERIK 840D数控系统以高端的性能而赢得使用者的好评本笔记以PAMA机床为例,通过整理筛选以往的实际加工零件,笔者终于完成了本书的制作,本书总结的例题皆为实际加工案例,不同于学校的教科书,只要用心学习,不出多日读者自己便可熟练的编程本笔记适合初学者使用,每个程序后面都有详细的指令用法及含义解释,为笔者多年的经验总结。
由于笔者水平有限,书中难免有不足之处,欢迎读者批评指出。
祝读者早日掌握编程技术,步步高升。
编者2011年8月目录第一章基础知识 (5)1.1西门子840D系统程序命名规则 (5)1.2 快速定位指令 G00(模态指令) (5)1.3直线插补指令 G01(模态指令) (6)1.4 圆弧插补 G02/G03(模态指令) (7)1.5 暂停指令 G04 (模态指令) (8)1.6 准确停止 G09 (非模态指令)、G60(非模态指令) (8)1.7 G17、G18、G19 加工平面选择(模态指令) (9)1.8 G40、G41、G42刀具半径补偿(模态指令) ..................................... 错误!未定义书签。
西门子840D编程学习

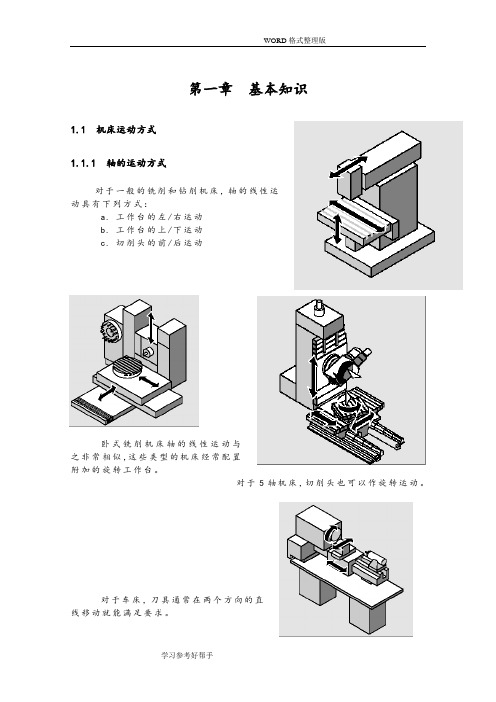
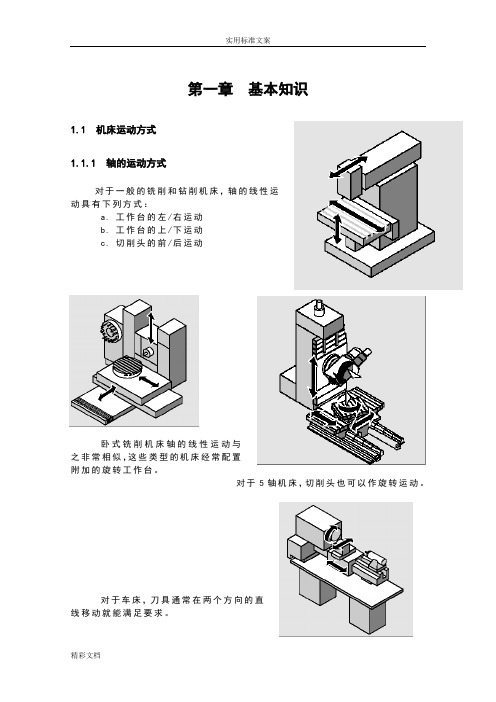
第一章 基本知识1.1 机床运动方式 1.1.1 轴的运动方式对于一般的铣削和钻削机床,轴的线性运动具有下列方式:a. 工作台的左/右运动b. 工作台的上/下运动c. 切削头的前/后运动卧式铣削机床轴的线性运动与之非常相似,这些类型的机床经常配置附加的旋转工作台。
对于5轴机床,切削头也可以作旋转运动。
对于车床,刀具通常在两个方向的直线移动就能满足要求。
1.1.2 直线运动轴的命名一般用字母X、Y、Z来命名各个线性运动轴的运动方向。
a.X轴:工作台的左/右运动b.Y轴:工作台的前/后运动c.Z轴:工作台的上/下运动每一个线性运动轴相对应有一个旋转运动轴,旋转运动轴用下列字母表示:a.A轴:围绕X轴的旋转运动b.B轴:围绕Y轴的旋转运动c.C轴:围绕Z轴的旋转运动对于只有两个线性运动轴的车削机床用下列方法来描述刀具的运动:刀具的横向运动通常叫作X轴,刀具的纵向运动通常叫作Z轴。
1.1.3 刀具的相对运动铣削机床的加工无论是靠刀具的运动还是靠工作台的运动来满足加工要求。
在数控加工技术中,通常假定刀具总是运动的。
操作者不必考虑机床运动的具体执行方式。
这种假定方法也适用于其它不同类型机床的程序运行。
1.1.4 位置数据机床运动可以通过编程使某一指定轴到达指定位置。
例如:X100这表示工作台在X方向移动100mm,或者说是刀具相对于工件在X方向移动100mm。
也可以通过程序来实现多轴联动。
例如:X100 Y1001.2 工件位置表示1.2.1 机床坐标系机床必须指定一个线性运动轴在相应方向运动的参考坐标系,以使机床或切削控制在指定位置成为可能。
通常以字母X、Y、Z轴构成的直角坐标系来描述。
按照标准DIN 66217的规定,机床刀具运动用右手直角笛卡儿坐标系来描述,坐标系的交点叫零点或原点。
有时机床工作需要甚至必须用负的位置坐标数据,原点以左的位置坐标通过在坐标数据前冠以“—”号表示。
1.2.2 位置定义为了定义一个位置,假定沿着坐标轴遵循一定的规则。
西门子840D数控编程基础

目录第一章数控机床简介 (1)1.1 数控机床的组成1.2 数控机床的分类第二章数控加工工艺………………………………….2.1数控加工工艺的主要内容2.2 数控加工程序及其编制过程第三章数控加工基础知识………………………………….3.1坐标系3.2绝对/增量尺寸3.3加工平面第四章数控程序的格式和编制……………………………….4.1程序结构4.2注解和编程信息4.3常用数控系统功能简介4.4常用数控编程工艺指令4.5坐标系偏置指令4.6刀具补偿指令4.7 参数变量与程序跳转4.8子程序的调用4. 9固定循环4. 10编程举例:G功能的综合应用第五章数控刀具的选择………………………………….5.1硬质合金刀具5.2陶瓷刀具5.3切削用量的选择第六章数控机床的操作………………………………….6.1数控机床的操作方式简介6.2数控机床的操作方式6.3数控机床其他操作介绍1 数控机床1.1 数控机床的组成数控机床主要是由数控系统、伺服系统、辅助控制装置、机床本体、控制介质组成。
1.1.1 控制介质控制介质是指将零件加工信息传递到控制介质去的程序载体。
常用的有磁盘、U盘、移动硬盘等。
1.1.2 数控系统数控系统通常是一台带有专门系统软件的专用微机。
它由输入装置、控制运算器和输出装置等构成。
它接受控制介质上的数字化信息,经过控制软件或逻辑电路进行编译、运算和逻辑处理后,输出各种信号和指令控制机床的各个部分,进行规定的、有序的动作。
1.1.3 伺服系统伺服系统是数控机床的执行机构,是由驱动和执行两大部分组成。
它接受数控系统的指令信息,并按指令信息的要求控制执行部件的进给速度、方向和位移。
常用的位移执行机构有步进电动机、直流伺服电动机和交流伺服电动机,后两者均带有光电编码器等测量元件。
1.1.4 辅助控制装置辅助控制装置是介于数控装置和机床机械、液压部件之间的强电控制装置。
1.1.5 机床本体机床本体是数控机床的主体。
西门子840D编程学习
第一章 基本知识1.1 机床运动方式 1.1.1 轴的运动方式对于一般的铣削和钻削机床,轴的线性运动具有下列方式:a. 工作台的左/右运动b. 工作台的上/下运动c. 切削头的前/后运动卧式铣削机床轴的线性运动与之非常相似,这些类型的机床经常配置附加的旋转工作台。
对于5轴机床,切削头也可以作旋转运动。
对于车床,刀具通常在两个方向的直线移动就能满足要求。
1.1.2 直线运动轴的命名一般用字母X、Y、Z来命名各个线性运动轴的运动方向。
a.X轴:工作台的左/右运动b.Y轴:工作台的前/后运动c.Z轴:工作台的上/下运动每一个线性运动轴相对应有一个旋转运动轴,旋转运动轴用下列字母表示:a.A轴:围绕X轴的旋转运动b.B轴:围绕Y轴的旋转运动c.C轴:围绕Z轴的旋转运动对于只有两个线性运动轴的车削机床用下列方法来描述刀具的运动:刀具的横向运动通常叫作X轴,刀具的纵向运动通常叫作Z轴。
1.1.3 刀具的相对运动铣削机床的加工无论是靠刀具的运动还是靠工作台的运动来满足加工要求。
在数控加工技术中,通常假定刀具总是运动的。
操作者不必考虑机床运动的具体执行方式。
这种假定方法也适用于其它不同类型机床的程序运行。
1.1.4 位置数据机床运动可以通过编程使某一指定轴到达指定位置。
例如:X100这表示工作台在X方向移动100mm,或者说是刀具相对于工件在X方向移动100mm。
也可以通过程序来实现多轴联动。
例如:X100 Y1001.2 工件位置表示1.2.1 机床坐标系机床必须指定一个线性运动轴在相应方向运动的参考坐标系,以使机床或切削控制在指定位置成为可能。
通常以字母X、Y、Z轴构成的直角坐标系来描述。
按照标准DIN 66217的规定,机床刀具运动用右手直角笛卡儿坐标系来描述,坐标系的交点叫零点或原点。
有时机床工作需要甚至必须用负的位置坐标数据,原点以左的位置坐标通过在坐标数据前冠以“—”号表示。
1.2.2 位置定义为了定义一个位置,假定沿着坐标轴遵循一定的规则。
840D基础编程
1、准备功能代码(G代码)G代码有两种模态:模态式G代码和非模态式G代码。
模态式G代码具有延续性,非模态式G代码,只限定在被指定的程序块中有效。
2、辅助代码(M代码)M代码是指用于机床控制的指令,每一程序块中最多5个M功能M0* 编程停止M3 主轴右转M1* 任意停止M4 主轴左转M2* 主程序结束,返回程序开头部分M5 主轴停止M30* 程序结束,效果同M2M17* 子程序结束3、杂功能代码(F,S,T,D)F表示进给速度,单位为mm/min 或mm/revS表示主轴转速,单位是rev/minT表示刀具选择代码D表示刀具补偿号4、固定循环代码第一类:钻镗循环CYCLE81~CLCLE89第二类:铣削循环CYCLE71~CLCLE72,SLOT1~ SLOT2,POCKET1~ POCKET等5、运算符/算术功能+加-减* 乘/ 除链式运算符SIN()正弦ASIN()反正弦COS()余弦ACOS()反余弦TAN()正切ATAN2(,)反正切ABS()绝对值SQRT()平方根POT()二次幂(平方)TRUNC()舍位至整数ROUND()舍入成整数6、为了使其它用户和程序员更容易理解NC程序,建议在程序中插入有意义的注解,用分号(“;”)例:N10 G1 F100 X10 Y20 ;解释NC块的注解或N20 ;94年11月21日BOb Miller写入的程序7、绝对/增量尺寸,G90/91绝对尺寸G90(模态)X100 绝对尺寸(非模态)增量尺寸G91(模态)X100增量尺寸(非模态)例:N10 G90 G0 X45 Y60 Z2 T1 S2000 M3N20 G1 Z-5 F500 刀具横进给N30 G2 X20 Y35 I0 J-25 绝对尺寸的圆中心点N40 G0 Z2 退回N50 M30 块结束8、圆弧插补,G2/G3G2/G3 X...Y...Z...I...J...K...G2/G3 X...Y...Z...CR=..CR=+...:角度小于或等于180︒CR=-...:角度大于180︒整圆不能用CR=编程,但必须用圆终点和插补参数编程。
SINUMERIK 840D 控制系统代码指令
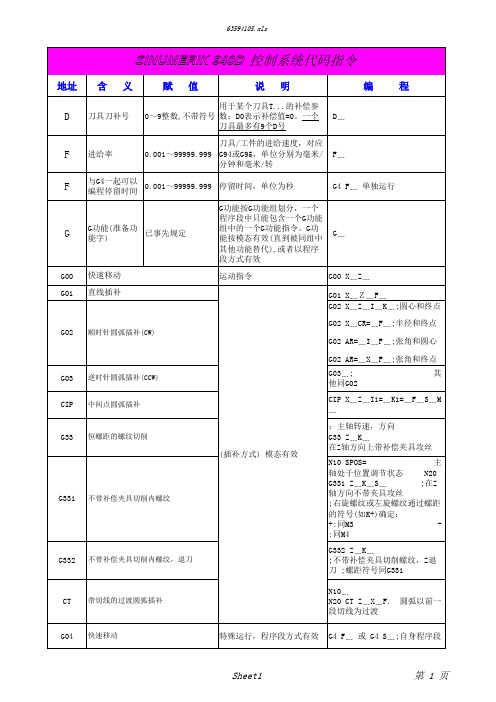
G71﹡ 公制尺寸
G700 G710 G90﹡
英制尺寸,也用于进给率F 公制尺寸,也用于进给率F 绝对尺寸
G91 增量尺寸 G94﹡ 直线进给率F,单位为毫米/分
G95 主轴旋转进给率F,单位为毫米/转
英制/公制尺寸,模态有效
绝对尺寸/增量尺寸,模态有效 进给/主轴模态有效
CFC 圆弧加工时打开进给率修调 CFTCP 关闭进给率修调
ATRANS X﹍Z﹍ 自身程序段
写存储器,程序段方式有效
ROT RPL=﹍ ;在当前平面中旋 转G17~G19
AROT RPL=﹍ ;在当前平面中旋 转G17~G19
SCALE X﹍Z﹍在所给定轴方向 比例系数,自身程序段
ASCALE X﹍Z﹍在所给定轴方向 比例系数,自身程序段
MIRROR X0 改变方向的坐标 轴,自身程序段
Sheet1
第2页
63594105.xls
地址 含 义
G60 准确定位
赋值
说明
定位性能,模态有效
编
程
G64 连续路径方式
G9 准确定位,单程序段有效 G601 在G60,G9方式下准确定位,精 G602 在G60,G9方式下准确定位,粗
程序段方式准停,段方式有 效
准停窗口,模态有效
G70 英制尺寸
;右旋螺纹或左旋螺纹通过螺距
的符号(如K+)确定:
+:同M3
-
:同M4
G332 Z﹍K﹍ ;不带补偿夹具切削螺纹,Z退 刀 ;螺距符号同G331
CT 带切线的过渡圆弧插补
N10﹍ N20 CT Z﹍X﹍F. 圆弧以前一 段切线为过渡
G04 快速移动
特殊运行,程序段方式有效 G4 F﹍ 或 G4 S﹍;自身程序段
专业西门子840d数控 大全
本书为工厂内部培训资料,页面为A4大小,正文76页,市面上没有出售,如有需要请联系我1说明SINUMERIK 840D 是西门子数控产品的突出代表。
于20世纪90年代推出。
它保持西门子前两代系统SINUMERIK 880和840C的三CPU结构:人机通信CPU(MMC-CPU)、数字控制CPU(NC-CPU)和可编程逻辑控制器CPU(PLC-CPU)。
三部分在功能上既相互分工,又互为支持。
它在复杂的系统平台上,通过系统设定而适于各种控制技术。
SINUMERIK 840D数控系统适用于几乎所有的应用,可实现灵活组网,发挥机床及生产线最大效力,高度开放的HMI和NCK能满足不同客户的个性化需求,无论是各种用户定制画面,还是专有技术、特殊工艺均能轻松与系统无缝连接。
利用完善的SINUMERIK MDynamics (3轴/5轴)铣削工艺包、优异的同步功能,80位浮点数纳米(NANOFP)计算精度、空间补偿系统(VCS)等创新技术的应用使机床性能更胜一筹,实现最佳的加工质量。
可以说西门子系统在中国得到了广泛的运用,尤其SINUMERIK 840D数控系统以高端的性能而赢得使用者的好评本笔记以PAMA机床为例,通过整理筛选以往的实际加工零件,笔者终于完成了本书的制作,本书总结的例题皆为实际加工案例,不同于学校的教科书,只要用心学习,不出多日读者自己便可熟练的编程本笔记适合初学者使用,每个程序后面都有详细的指令用法及含义解释,为笔者多年的经验总结。
由于笔者水平有限,书中难免有不足之处,欢迎读者批评指出。
祝读者早日掌握编程技术,步步高升。
编者2011年8月2目录第一章基础知识.............................................................................................................. 错误!未定义书签。
840D简明G代码

I, K 插值参数方向X 方向的 I
Z 方向的 K 确定圆弧的中心点
编程 CR指令
N20 G90 G0 X68 Z102
N30 G90 G3 X20 Z150 CR=48
参数CR 为圆弧半径
CR+ 跨越角度 180°
连续轨迹模式下的进料速率G64 G641
编程 G64 连续轨迹模式
G641 包含轮廓过渡圆角的块过渡
圆角距离毫米通过以下命令编程
ADIS = 对于 G1 G2 G3 或ADISPOS = 对于 G0
两个函数均适用于预先速度控制
G64
ADIS=0.05
G641
插入的过渡线段
偏置仅在编程工作平面G17 到 G19 中生效
工具刀尖半径补偿G41/G42
编程
N5 G90 G0 G18 G41 D... X... Y... Z... LF
G41 调用半径补偿工件的左横向行进方向的工具移动
G42 调用半径补偿工件的右横向行进方向的工具移动
G40 取消半径补偿
G90 AROT Z 30 LF
要关闭 ZO TRANS 不指定轴
要关闭旋转 ROT 不指定角度
任何情况下此处均会删除完整的框架
TRANS 绝对平移
ATRANS 增量平移
X, Y, Z 轴向的零偏置坐标
ROT 绝对旋转
AROT 增量旋转
X, Y, Z 旋转角度时参照的坐标轴正号表示逆时针旋转
G41 调用切削刀具补偿轮廓的左横向行进方向的工具
G42 调用切削刀具补偿轮廓的右横向行进方向的工具
840d

西门子840D/810D循环指令的解说明循环插补,G2/G3,CIP编程G2/G3 X...Y...Z...I...J...K...G2/G3 AP=...RP=...G2/G3 X...Y...Z...CR=...G2/G3 AR=...I...J...K...G2/G3 AR=...X...Y...Z...CIP X...Y...Z...T1=...J1=...K1=...命令和参数解释G2 在环形轨迹上顺时移动G3 在环形轨迹上逆时移动CIP 穿过中间点的循环插补X Y Z 笛卡儿坐标端点I J K 笛卡儿坐标圆心点(X、Y、Z方向)AP= 极坐标端点,就极角而论RP= 极坐标端点,当极半径与圆半径相符时CR= 圆半径AR= 弧角I1= J1= K1= 笛卡儿坐标的中间点(在X、Y、Z向)功能循环插补能加工整个圆或弧。
顺序工作面说明控制器需要工作面参数(G17至G19),以便计算圆旋转方向----G2顺时/G3逆时。
确定工作面一般是合理的。
例外你还可以加工选择的(不带弧角和螺旋线参数)工作面以外的圆。
在这种情况下,你指定为端点的轴地址决定着圆面。
补充提示G2/G3为模态FGROUP可用来定义哪个轴将随已编程进给移动。
你将在第5节获得更多的信息。
控制器提供不同的编制循环运动的方法,使你能编制几乎任何一种制图尺寸。
详细说明请参考以下几页。
循环路径用中心点和端点编程循环运动按以运行:·笛卡儿坐标X,Y,Z的端点和·地址I,J,K圆中心点标识符有以下含义:I:X向圆中心点坐标J:Y向圆中心点坐标K:Z向圆中心点坐标如果圆用中心点,不用端点编程,结果就是一个整圆。
用绝对尺寸和增量尺寸输入绝对或增量尺寸的系统设定值G90/G91仅对圆端点有效,中心点坐标I,J,K通常参考圆起点,用增量尺寸输入。
参考带I=AC(...),J=AC(...),K=AC(...)的工件零点,非模态编制绝对中心点。
840D简明教程

第一节:对刀按键激活手动方式1.2.用手轮把刀架摇至工件合适位置,并用刀尖轻碰内孔壁或者外圆按键返回加工界面3.4.按屏幕下方“对刀”软键。
在出现的画面中用用切换选项方向键变换位置,(依次设置为G18加工平面,G500工件坐标系和T1D1号刀具)注:G17为XY平面,G18为XZ平面,G19为YZ平面车床为G18 G500为西门子系统默认工件坐标系轴位置输入当前工件的内孔或外圆直径,并按下X5.在键,使其生效并按下0键,抬升刀架,并轻碰工件上表面;在Z轴处输使其生效软键,即可完成对刀“确认”6.按屏幕右方说明:1.一定要搞清楚自己对的是哪一把刀,在其后的编程中调用它就可以了。
2.通过调整一把刀具的不同刀沿号或者不同的磨损值可以进行高效的粗精加工,并且无需修改程序,同时也更加容易保证精度。
(如何通过修改磨损保证精度见后页)西门子840D简明教程第二节:磨损值的调整与计算磨损值的意义在于它会沿+X方向或者-X方向按给定的数值发生偏移,以做到留下加工余量或者调节精度的作用。
几点常识:1.外圆应该留正的磨损值,内孔留负值2.西门子系统磨损值为单边的余量,即半径值(Fanuc为直径值)精加工磨损值的计算方法:(理想值—测量值)/2+当前磨损值=精加工磨损值范例:有一工件内径基本尺寸要求为500mm上偏差+0.06,下偏差0,预留了-0.5mm的磨损值,现测量得出实际尺寸为498.86mm,问磨损值应该改为多少?答:由提示得出此工件内孔的理想尺寸应为500.03mm,根据(理想值—测量值)/2+当前磨损值=精加工磨损值公式推出:(500.03-498.86)/2+(-0.5)=0.085所以最终磨损值应为0.085mm西门子840D简明教程第三节:程序的测试与模拟西门子840D具有强大的图形仿真及交互帮助能力。
通过仿真可以检验那些没有绝对把握的程序,并可以在系统的提示下,把程序修改正确,是非常好用的功能。
在模拟环境中机床是被锁住的,但屏幕坐标照常运动,并有形象的3D模拟加工动画。
西门子840D G指令

840D综合G00快速定位;G01直线插补;G02顺时针圆弧插补;G03逆时针圆弧插补;G04暂停;G09准确停止;G17 XY平面选择;G18 ZX平面选择;G19 YZ平面选择;G20英制指令;G21公制指令;G27返回参考点检查;G28返回参考点;G29返回第二参考点;G30返回第三/四参考点;G40刀具半径补偿取消;G41刀具半径补偿左;G42刀具半径补偿右;G43刀具长度补偿+;G44刀具长度补偿-;G45刀具偏置+;G46刀具偏置-;G47刀具偏置++;G48刀具偏置--;G49刀具长度补偿取消;G52局部坐标系;G53选择机床坐标系;G54~G59预置工件坐标系1~6;G60单向定位;G61准确停止(模态指令);G62拐角减速;G63倍率禁止;G64切削模式;G65宏调用;G66模态宏调用;G73深孔钻循环1;G74攻丝循环(反螺纹);G76镗循环1;G80取消固定循环;G81钻孔循环;G82镗循环2;G83深孔钻循环;G84攻丝循环(正螺纹);G85~G89镗循环3~7;G90绝对值编程;G91增量值编程;G94每分进给;G95每转进给;.G98固定循环回起始点;G99固定循环回R点。
M00程序停止;M01可选程序停止;M02程序结束;M03主轴正转;M04主轴反转;M05主轴停止;M06自动刀具交换;M08冷却开;M09冷却关;M29刚性攻丝;M30程序结束并回程序头。
G54G18G90或G91增量。
编程找出点在GO1走直线(这直线是垂直于那个面的线,这个你自己算点)就可以加工了,刀具开始要调整好角度,垂直于那个面。
G17是XY平面G18是zx平面G19是YZ平面这个也比较好办。
比如在G17平面上。
钻孔用的z方向,如果面不平的情况,比如他往x方向倾斜的多少度。
那么钻孔时候走的线应该是斜线(你应该是想做一个垂直于斜面的孔吧)那么你可以先在cad里面画出来,把要钻的那个孔走的那条直线画出来,在找到起始点,坐标值和终点坐标值都找的到,最后就是用G01走出来了,走斜线不是一样走吗.不管在哪个面都一样,不愿计算,就用cad画出来再标出起始点和终点。
840d编程操作手册

840d编程操作手册一、简介840D编程操作手册是为了帮助用户更好地理解和使用840D数控系统而编写的。
本手册详细介绍了840D系统的编程环境、数据类型与变量、程序结构、常用函数、设备控制、人机界面编程、系统调试与优化等方面的内容。
通过阅读本手册,用户可以快速掌握840D系统的编程技巧和方法,提高生产效率。
二、系统概述840D系统是一款高性能的数控系统,具有自动化、智能化、高效化等特点。
它可以实现高精度的加工和检测,广泛应用于机械制造、汽车制造、航空航天等领域。
840D系统的核心是可编程控制器(PLC),通过PLC可以实现各种逻辑控制、运动控制和工艺控制等功能。
三、编程环境840D系统的编程环境采用德国西门子公司的STEP 7软件,该软件是一款功能强大的编程软件,支持多种编程语言,包括LAD(梯形图)、STL(指令表)和FBD(功能块图)等。
用户可以根据需要选择不同的编程语言进行编程。
四、数据类型与变量在840D系统中,常用的数据类型包括位型(BOOL)、字节型(BYTE)、字型(WORD)、双字型(DWORD)和实数型(REAL)等。
此外,系统还支持各种复合数据类型和数组类型。
变量是程序中用于存储数据的标识符,用户可以根据需要定义各种类型的变量,以便在程序中进行数据处理和传输。
五、程序结构840D系统的程序结构采用模块化设计,主要包括主程序、子程序和中断程序等。
主程序是程序的入口点,用于调用子程序和执行循环操作等;子程序是实现特定功能的程序模块,可以被主程序和其他子程序调用;中断程序是用于处理实时事件和异常情况的特殊程序模块。
用户可以根据需要编写不同层次的程序模块,以便更好地组织和管理程序。
六、常用函数840D系统提供了丰富的常用函数,用于实现各种数学计算、逻辑处理、数据转换和控制功能等。
这些函数可以帮助用户简化编程过程和提高程序的可靠性。
用户可以根据需要选择合适的函数进行调用,以便快速实现所需的功能。
西门子840D编程学习
第一章 基本知识1.1 机床运动方式 1.1.1 轴的运动方式对于一般的铣削和钻削机床,轴的线性运动具有下列方式:a. 工作台的左/右运动b. 工作台的上/下运动c. 切削头的前/后运动卧式铣削机床轴的线性运动与之非常相似,这些类型的机床经常配置附加的旋转工作台。
对于5轴机床,切削头也可以作旋转运动。
对于车床,刀具通常在两个方向的直线移动就能满足要求。
1.1.2 直线运动轴的命名一般用字母X 、Y 、Z 来命名各个线性运动的运动方向。
a. X 轴:工作台的左/右运动b. Y 轴:工作台的前/后运动c. Z 轴:工作台的上/下运动每一个线性运动轴相对应有一个旋转运动旋转运动轴用下列字母表示:a. A 轴:围绕X 轴的旋转运动b. B 轴:围绕Y 轴的旋转运动c. C 轴:围绕Z 轴的旋转运动对于只有两个线性运动轴的车削机床用下列方法来描述刀具的运动:刀具的横向运动通常叫作X 轴,刀具的纵向运动通常叫作Z 轴。
1.1.3 刀具的相对运动铣削机床的加工无论是靠刀具的运动还是靠工作台的运动来满足加工要求。
在数控加工技术中,通常假定刀具总是运动的。
操作者不必考虑机床运动的具体执行方式。
这种假定方法也适用于其它不同类型机床的程序运行。
1.1.4 位置数据机床运动可以通过编程使某一指定轴到达指定位置。
例如:X100这表示工作台在X 方向移动100mm ,或者说是刀具相对于工件在X 方向移动100mm 。
也可以通过程序来实现多轴联动。
例如:X100 Y1001.2 工件位置表示1.2.1 机床坐标系机床必须指定一个线性运动轴在相应方向运动的参考坐标系,以使机床或切削控制在指定位置成为可能。
通常以字母X 、Y 、Z 轴构成的直角坐标系来描述。
按照标准DIN 66217的规定,机床刀具运动用右手直角笛卡儿坐标系来描述,坐标系的交点叫零点或原点。
有时机床工作需要甚至必须用负的位置坐标数据,原点以左的位置坐标通过在坐标数据前冠以“—”号表示。
西门子840d数控系统各指令

西门子840d数控系统各指令
Drive:设定此轴的逻辑驱动号
Active:设定是否激活此模块
配置完成并有效后,需存储一下(SAVE)-→OK
此时再做一次NCK复位。启动后显示300701报警。
这是原为灰色的FDD,MSD变为黑色,可以选电机了;
操作步骤如下:FDD-→Motor Controller-→Motor Selection-→按电机铭牌选相应电机-→OK-→OK→Calculation
/News_Details.aspx?NewsID=7444[2009-9-1 9:01:05]
西门子840d数控系统各指令
组2 G-功能 G G 功能(准备功能)仅为整数, G... G 功能划分在G 功能组中。一个程序段中只已事先定义 能有一个G 功能组中的一个G 功能指令。 G 功能可以是模态的(直到被同组中其他功能 替代),或者是非模态的(只在写入的程序段 中有效)。 G0 带快速移动的直线插补(快速移动)运动 指令 G0 X... Z... m 1 G11 带进给率的直线插补(直线插补)G1 X... Z... F... m 1 G2 顺时针圆弧插补G2 X... Z... I... K... F... ;圆心和终点 m1 G2 X... Z... CR=... F... ;半径和终点 G2 AR=... I... K... F... ;张角和圆心 G2 AR=... X... Z... F... ;张角和终点 G3 逆时针圆弧插补G3 ... ;其他同G2 m 1 G4 事先定义的停留时间特殊运动 G4 F... ;以s 表示的停留时 间,或者 s2 G4 S... ; 以主轴旋转表示的 停留时间 ;独立程序段 G5 斜向切入式磨削斜向切入式 s 2 G7 斜向切入式磨削时的补偿运动初始位置 s 2 G9 准确停 – 减速s 11 G171 选择工件平面X/Y 进给方向Z m 6 G18 选择工件平面Z/X 进给方向Y m 6 G19 选择工件平面Y/Z 进给方向X m 6 G25 工作区域下限通道轴赋值G25 X.. Y.. Z.. ; 独立程序段 s3 G26 工作区域上限G26 X.. Y.. Z.. ; 独立程序段 s3 G33 恒螺距的螺纹插补0.001, ..., 2000.00 mm/U 运动指令G33 Z... K... SF=... ;圆柱形螺纹
西门子840D编程学习
第一章 基本知识1.1 机床运动方式 1.1.1 轴的运动方式对于一般的铣削和钻削机床,轴的线性运动具有下列方式:a. 工作台的左/右运动b. 工作台的上/下运动c. 切削头的前/后运动卧式铣削机床轴的线性运动与之非常相似,这些类型的机床经常配置附加的旋转工作台。
对于5轴机床,切削头也可以作旋转运动。
对于车床,刀具通常在两个方向的直线移动就能满足要求。
1.1.2 直线运动轴的命名一般用字母X 、Y 、Z 来命名各个线性运动的运动方向。
a. X 轴:工作台的左/右运动b. Y 轴:工作台的前/后运动c. Z 轴:工作台的上/下运动每一个线性运动轴相对应有一个旋转运动旋转运动轴用下列字母表示:a. A 轴:围绕X 轴的旋转运动b. B 轴:围绕Y 轴的旋转运动c. C 轴:围绕Z 轴的旋转运动对于只有两个线性运动轴的车削机床用下列方法来描述刀具的运动:刀具的横向运动通常叫作X 轴,刀具的纵向运动通常叫作Z 轴。
1.1.3 刀具的相对运动铣削机床的加工无论是靠刀具的运动还是靠工作台的运动来满足加工要求。
在数控加工技术中,通常假定刀具总是运动的。
操作者不必考虑机床运动的具体执行方式。
这种假定方法也适用于其它不同类型机床的程序运行。
1.1.4 位置数据机床运动可以通过编程使某一指定轴到达指定位置。
例如:X100这表示工作台在X 方向移动100mm ,或者说是刀具相对于工件在X 方向移动100mm 。
也可以通过程序来实现多轴联动。
例如:X100 Y1001.2 工件位置表示1.2.1 机床坐标系机床必须指定一个线性运动轴在相应方向运动的参考坐标系,以使机床或切削控制在指定位置成为可能。
通常以字母X 、Y 、Z 轴构成的直角坐标系来描述。
按照标准DIN 66217的规定,机床刀具运动用右手直角笛卡儿坐标系来描述,坐标系的交点叫零点或原点。
有时机床工作需要甚至必须用负的位置坐标数据,原点以左的位置坐标通过在坐标数据前冠以“—”号表示。
Siemens840D数控编程

第一讲:基本概念1、西门子系统简介:常见系统有802S/C系统、802D系统、810D系统和840D系统。
其中,西门子802S/C系统是西门子公司专门针对中国用户开发的一款系统。
目前西门子系统在中国市场得到了广泛的应用,西门子840D更是以高端系统出现。
西门子系统与FANUC系统的比较2、基本概念2.1插补功能:指定刀具沿直线轨迹或圆弧轨迹移动的功能称为插补功能。
它属于准备功能,用G代码后跟若干位数字来表示。
2.2进给功能:用于指定刀具运动速度的功能。
单位为mm/min。
用F指令2.3参考点:一个固定的点,是机床生产商通过行程开关设定的一个特定位置。
在数控操作中所谓的“回零”回的就是此点。
2.4机床原点(零点):即机床坐标系的原点,也是一个固定点。
它是机床制造商在制造、校正机床时设定的一个特殊位置。
2.5坐标系:在数控系统中提到共四个坐标系,即机床坐标系、机床参考坐标系、工件坐标系和编程坐标系。
数控系统中的坐标系均为右手笛卡尔坐标系,如图示:2.5.1机床坐标系:是机床制造商在设计机床时设定的一个坐标系2.5.2机床参考坐标系:是机床生产商通过行程开关设定的一个坐标系2.5.3工件坐标系:为确定工件在机床中的准确位置而建立的一个坐标系,即后面所学到的可设定零点偏置确定的坐标系。
2.5.4编程坐标系:在程序编制过程中,在零件图纸上建立的坐标系2.6主轴功能:用于确定主轴转速的功能,即S指令主轴定位用SPOS=XX格式表示2.7切削速度:切削工件时刀具与工件的相对速度称为切削速度v.S=1000v/Πd其中:S:主轴转速V:切削速度D:刀具直径例:假设用直径φ160mm的刀具,以100m/min的切削速度加工工件,试求其主轴转速?注:进给速度Vf=机床转速n*刀具齿数Z*每齿切削深度fz,单位是毫米/分钟2.8辅助功能:指令机床部件启停操作的功能。
用M指令表示2.9主程序和子程序:2.10准备功能:用来控制刀具(或工作台)运动轨迹的机能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
840D综合G00快速定位;G01直线插补;G02顺时针圆弧插补;G03逆时针圆弧插补;G04暂停;G09准确停止;G17 XY平面选择;G18 ZX平面选择;G19 YZ平面选择;G20英制指令;G21公制指令;G27返回参考点检查;G28返回参考点;G29返回第二参考点;G30返回第三/四参考点;G40刀具半径补偿取消;G41刀具半径补偿左;G42刀具半径补偿右;G43刀具长度补偿+;G44刀具长度补偿-;G45刀具偏置+;G46刀具偏置-;G47刀具偏置++;G48刀具偏置--;G49刀具长度补偿取消;G52局部坐标系;G53选择机床坐标系;G54~G59预置工件坐标系1~6;G60单向定位;G61准确停止(模态指令);G62拐角减速;G63倍率禁止;G64切削模式;G65宏调用;G66模态宏调用;G73深孔钻循环1;G74攻丝循环(反螺纹);G76镗循环1;G80取消固定循环;G81钻孔循环;G82镗循环2;G83深孔钻循环;G84攻丝循环(正螺纹);G85~G89镗循环3~7;G90绝对值编程;G91增量值编程;G94每分进给;G95每转进给;G98固定循环回起始点;G99固定循环回R点。
M00程序停止;M01可选程序停止;M02程序结束;M03主轴正转;M04主轴反转;M05主轴停止;M06自动刀具交换;M08冷却开;M09冷却关;M29刚性攻丝;M30程序结束并回程序头。
G54G18G90或G91增量。
编程找出点在GO1走直线(这直线是垂直于那个面的线,这个你自己算点)就可以加工了,刀具开始要调整好角度,垂直于那个面。
G17是XY平面G18是zx平面G19是YZ平面这个也比较好办。
比如在G17平面上。
钻孔用的z方向,如果面不平的情况,比如他往x方向倾斜的多少度。
那么钻孔时候走的线应该是斜线(你应该是想做一个垂直于斜面的孔吧)那么你可以先在cad里面画出来,把要钻的那个孔走的那条直线画出来,在找到起始点,坐标值和终点坐标值都找的到,最后就是用G01走出来了,走斜线不是一样走吗.不管在哪个面都一样,不愿计算,就用cad画出来再标出起始点和终点。
补充回答,ye可以不算。
用G16极坐标编程。
比如在G17平面xy比如G90G16GO1x10y20X表示切入x10 Y表示的是角度20度。
在G18平面上是zx。
z表示长度,x表示角度在G19平面式yzy表示长度,z表示角度。
这样你就不用算点了用完了后用G15取消极坐标编程。
主要用绝对坐标的极坐标编程,那个角度指的是根据你坐标系为原点,跟你坐标轴之间的夹角。
(以第一坐标轴为准)比如xy平面是以x轴为准逆时针为角度正方向。
zx平面就以z轴为为准(也就是以第一轴之间的夹角)。
如果还不能理解,那你就麻烦点用原来的笛卡尔坐标编程算出来好了西门子840D/810D数控系统数控编程1. 程序跳段:只要在希望跳过的程序段的程序段前插入识别符“/”,在程序执行过程中的指令便不会被执行,转而继续执行下面不带跳段识别符的程序段。
例如:N10 …执行/ N20…跳过N30…执行2. 条件转向语句为“IF…GOTOB/GOTOF…”,条件式所用的条件比较符号允许用:= =(等于)、>、>= 、<、<=。
3. 程序注释:注释通常附加在程序段的末尾,并用分号“;”将注释与NC程序分开。
4. 主程序: 文件名的后缀位MPF;子程序:文件名的后缀位SPF;5. 极坐标运动指令:在其坐标系中的运动指令: G0 AP=…(极角) RP=…(极径)指令说明:G110极点位置,以刀具当前点位置为参考点。
G111 极点位置,在工件坐标系中的绝对尺寸。
G112 极点位置,以前一个极点位置为参考点。
6. 采用半径和终点进行圆弧编程:指令说明:G2/G3 X…Y…Z…CR…(为圆弧半径)。
CR =“+”…圆弧角度小于或等于180,CR=“-”…圆弧角度大于或等于180。
7. 螺旋插补(G2/G3,TURN)指令形式:G2/G3 X…Y…Z…I…J…K…TURN…G2/G3 X… Y… Z… CR=… TURN…指令说明:X,Y,Z:圆弧终点坐标。
I,J,K:圆心位置。
CR=:圆弧半径。
TURN=:圆弧经过起点的次数,即整圆的圈数。
整圆范围:0—999。
举例:起点(X27.5 ,Y32.99, Z-5)逆时针执行两整圈,接近终点(X20, Y5, Z-20).程序:…N30 G17 G0 X27.5 Y32.99 Z3N40 G17 G1 Z-5 F50N50 G3 X20 Y5 Z-20 I=AC(20) J=AC(20) TURN=28. 坐标系转换指令:可编程指令零点偏移(TRANS,ATRANS)指令形式:TRANS(A TRANS) X…Y…Z…(在单独程序段编写)指令说明:TRANS为可替代指令,参照被激活的可设定零偏(G54-G57)的绝对变换。
ATRANS为可加性指令,参照被激活的可设定零点或可编程零点的增量变换。
X,Y,Z为所规定的坐标轴上的偏移量。
不带坐标轴参数的TRANS指令可以撤销已经生效的全部编程框架。
9. 可编程旋转(ROT,AROT)指令形式:ROT(AROT) X…Y…Z…ROT(AROT) RPL=…..(RPL所选平面内坐标系按该角度旋转,旋转角度)指令说明:ROT为可替代指令。
AROT为叠加指令。
X、Y、Z:围绕该几何轴进行空间旋转。
应用ROT时,旋转点为先前规定的可设定零偏(G54-G57)。
应用AROT时,旋转点为现行的零偏。
10. 可编程镜像加工(MIRROR,AMIRROR)指令形式:MIRROR(AMIRROR) X…Y….X….11. 刀具偏置指令(刀具调用及刀具补偿T,D)12. 镗孔(进给镗下,孔底暂停,定向让刀,快速返回。
)CYCLE86(RTP,RFP,SDIS,DP,DPR,DTB,SDIR,RPA,RPO,RPAP,POSS)RTP:返回高度RFP:参考平面SDIS:安全间隙(无符号)DP:最终镗深DPR:相对镗深(无符号)DTB:孔底延时时间SDIR:旋转方向,3==M3,4==M4RPA:横坐标上的孔底让刀RPO:纵坐标上的孔底让刀RPAP:垂直方向上的孔底让刀POSS:主轴定向停的位置(单位:度)数控龙门西840D编程模式:机床状态:N10 G54 G90 G17 G40 G64 (G64连续式加工)N20 M43(换档)M40空档M41-44一档至四档N30 T01 D01N40 G04 F3 (停留时间)N50 S600 F280 M03N…(程序)N… ………………N… M05N… M02 (M30)4.刀具半径左右补偿:G41,G42西门子数控系统调试,编程和维修概要1.工件坐标系工件零点是原始工件坐标系的原点直角坐标:用坐标所达到这个点来确定坐标系中的点极坐标:用半径和角来测量工件或工件的一部分2.绝对坐标:所有位置参数与当前有效原点相关,表示刀具将要到达的位置增量坐标:如果尺寸并非项对于原点,而是相对于工件上的另一个点时,就要用增量坐标。
用增量坐标来确定尺寸,可以避免对这些尺寸进行转换。
增量坐标参照前一个电的位置数据,适用于刀具的移动,是用来描述刀具移动的距离3. 平面:用两个坐标轴来确定一个平面,第3个坐标轴与该平面相垂直,并确定刀具的横切方向。
编程时,要确定加工面以便于控制系统能准确计算出刀具偏置值。
4.零点的位置在NC机床上可以确定不同的原点和参考点位置,这些参考点:?用于机床定位?对工件尺寸进行编程它们是:M=机床零点A=卡盘零点,可以与工件龄点重合(值用于车床)W=工件零点=程序零点B=起始点,可以给每个程序确定起始点,起始点是第一个刀具开始加工的地方R=参考点,用凸轮和测量系统来确定位置,必须先知道到机床零点的距离,这样才能精确设定轴的位置:?建立坐标系1.带机床零点M的机床坐标2.基础坐标系(也可以使工件坐标系W)3.带工件零点W的工件坐标系4.带当前被一懂得工件零位Wa的当前工件坐标系轴的确立编程时,通常用到以下轴:机床轴:可以在机床数据中设置轴的识别符,识别符:X1、Y1、Z1、A1、B1、C1、U1、V1、AX1、AX2等;通道轴:所有在一个通道中移动的轴,识别符:X、Y、Z、A、B、C、U、V几何轴:主要轴,一般有X、Y、Z;特定轴:无需确定特定轴之间的几何关系,如转塔位置U、尾座V;路径轴:确定路径和刀具的运动,该路径的被编程进给率有效,在NC程序中用FGROUP 来确定路径轴;同步轴:指从编程的起点到终点移动同步的轴;定位轴:典型定位轴由零件承载、卸载的加载器,刀库/转塔等,标识符:POS,POSA,POSP 等指令轴(运动同步轴):由同步运动的指令生成指令轴,它们可以被定位,启动和停止,可与工件程序完全不同步。
指令轴是独立的插补,每个指令轴有自己的轴插补和进给率连接轴:指与另一个NCU箱连接的实际存在的轴,它们的位置会受到这个NCU的控制,连接轴可以被动态分派给不同的NCU通道PLC轴:通过特定功能用PLC对PLC轴进行移动,它们的运动可以与所有其他所有的轴不同步,移动运动的产生于路径和同步运动无关;?几何轴,同步轴和定位轴都是可以被编程的。
?根据被编程的移动指令,用进给率F,使轴产生移动。
?同步轴与路径轴同步移动,并用同样的时间移动所有的路径轴。
?定位轴移动与所有其它轴异步,这些移动运动与路径和同步运动无关。
?由PLC控制PLC轴,并产生与其他所有轴不同步的运动,移动运动与路径和同步运动无关编程语言?编程地址与含义?数据类型?指令:1.G指令G90:参照挡墙坐标系原点,在工件坐标系中编制刀具运行点的程序。
G91:参照最新接近点,编制刀具运行距离程序。
GO:快速移动使刀具快速定位,绕工件运动或接近换刀点G1:刀具沿与轴,斜线或其他任何空间定位平行的置线移动。
G2:在圆弧轨迹上以顺时针方向运行G3:在圆弧轨迹上以逆时针方向运行G4:暂停时间生效(F…以秒为单位;S…用主轴旋转次数确定时间)G17:无刀具半径补偿G18:刀具半径补偿到轮廓左侧G19:刀具半径补偿到轮廓右侧G40:解除刀具半径补偿G41:激活刀具半径补偿,刀具沿加工方向运行至轮廓的右边G42:激活刀具半径补偿,刀具沿加工方向运行至轮廓的左边G53:非模态接触,包括已编程的偏置G54…G57:调用第1到第4可设置零点偏置G94:直线进给率mm/分,英寸/分G95:旋转进给率mm/转,英寸/转2.M指令M0:编程停止M1:选择停止M2:主程序结束返回程序开头M30:程序结束M17:子程序结束M3:主动主轴顺时针方向旋转M4:主动主轴逆时针方向旋转M5:主动主轴停止M6:换刀指令3.其它F:进给率S:主动主轴的速度(单位:rev/min)T:调用刀具D:刀具偏置号(范围:1…32000)螺纹钻孔底径计算一般按下列公式:1.攻公制螺纹:螺距t<1毫米,dz=d-tt>1毫米,dz=d-(1.04~1.06)t式中t——螺距(毫米)dz——攻丝前钻孔直径(毫米)d——螺纹公称直径(毫米)2.攻英制螺纹:螺纹公称直径铸铁与青铜钢与黄铜3/16"~5/8" dz=25(d-1/n) dz=25(d-1/n)+0.1 3/4"~11/2" dz=25(d-1/n) dz=25(d-1/n) +0.2式中dz——攻丝前钻孔直径(毫米)d——螺纹公称直径(英寸)n——每英寸牙数。