面向汽车覆盖件模具快速开发的金属喷涂机器人研究
一种面向汽车车门喷漆机器人设计

一种面向汽车车门喷漆机器人设计发布时间:2021-07-28T10:28:18.607Z 来源:《中国科技信息》2021年9月上作者:张嘉乐彭增龙[导读] 为解决汽车车门人工喷漆过程中污染环境、危害人体健康的问题,本文主要针对喷漆中存在的这些问题,根据机器人在工作车间内的要求,设计了一种面向汽车车门的智能喷漆机器人。
河南科技大学信息工程学院张嘉乐彭增龙 471000摘要:为解决汽车车门人工喷漆过程中污染环境、危害人体健康的问题,本文主要针对喷漆中存在的这些问题,根据机器人在工作车间内的要求,设计了一种面向汽车车门的智能喷漆机器人。
设计内容主要包括机器人传感器的选择、工作流程设计以及控制系统人机交互设计。
经验证,该系统稳定、可靠,满足汽车车门喷漆要求,且操作简单、方便。
关键字:控制系统;传感器;喷漆机器人一、设计背景1.1设计现状目前随着以美国为首的发达国家对喷涂机器人的不断研究,出现了大量不同的喷涂机器人,如仿形喷涂机器人、固定式多自由度喷涂机器人、移动式喷涂机器人、有气喷涂机器人和无气喷涂机器人等等。
随着我国经济的快速发展,汽车作为人们的代步、运输工具,得到了广泛的应用。
就目前而言,汽车行业在我国已经成为了一个重要的支柱产业。
汽车车门喷漆作为汽车制造环节中重要的一环,也因此显得十分重要。
然而目前在汽车喷漆行业中由于自动喷漆设备的落后,许多汽车部件仍以手工喷漆为主。
手工喷涂的厚度不均匀、作业效率低。
已经不能满足汽车行业对于喷涂质量和效率的要求。
致使工件表面涂层起不到应有的保护作用以及美观的效果。
可见机器人喷漆技术的研究在保证部件喷涂的质量,以及保障工作人员的健康安全方面均有着重要意义。
二、设计内容2.1传感器选择为了保证位置精度,需要为机械臂每个关节选择传感器。
机器人内部传感器为增量式编码器。
增量式编码器能根据物体的旋转产生电信号,分辨率高,抗干扰能力强。
广泛应用于数控机床及机械配件、机器人、自动装配机、包装机械等。
机器人喷涂在汽车涂装中的应用

机器人喷涂在汽车涂装中的应用随着汽车工业的快速发展,汽车涂装工艺也在不断创新。
传统的手工喷涂方式已经无法满足高效、高质量的生产需求,取而代之的是机器人喷涂技术的广泛应用。
机器人喷涂不仅能提高生产效率,还能提升涂装质量和节约资源。
本文将从机器人喷涂的优势、应用案例以及未来发展趋势等方面,探讨机器人喷涂在汽车涂装中的应用。
机器人喷涂相较于传统的手工喷涂,具有以下几个优势:1. 精度高:通过使用机器人来喷涂汽车,可以减少喷涂过程中的人为误差,提高涂层的精度和均匀性。
2. 灵活性强:机器人喷涂可以灵活地适应各种汽车车身的形状和大小,无需进行繁琐的调整和修改,提高了生产效率。
3. 节省时间和资源:机器人喷涂可以在较短的时间内完成整个喷涂过程,缩短了生产周期,节约了生产成本。
4. 高安全性:机器人喷涂避免了工人直接接触有毒物质和高温环境,减少了工人的健康风险,提升了工作环境的安全性。
1. 车身外观喷涂:机器人可以对汽车车身进行外观喷涂,包括底漆、面漆和清漆等。
通过机器人喷涂,可以保证涂层的均匀性和质量,提高汽车的外观效果。
2. 内饰喷涂:除了车身外观,机器人喷涂还可以应用在汽车内饰的喷涂上。
仪表盘、门板等内饰部件的喷涂,减少了手工操作带来的不一致性和质量问题。
3. 零件喷涂:机器人喷涂还可以应用在汽车零件的喷涂上,例如发动机盖、车门等。
通过机器人喷涂,可以提高零件的涂装质量,降低不良品率,提高生产效率。
1. 智能化:随着人工智能技术的进步,机器人喷涂将更加智能化。
通过机器学习算法,机器人可以根据不同汽车的喷涂需求来进行喷涂参数的自动调整,提高喷涂效果。
2. 增强现实:借助增强现实技术,机器人喷涂可以在虚拟场景中进行模拟和优化,从而减少实际操作中的调整和修改,提高生产效率。
3. 无人化:未来,机器人喷涂将向无人化方向发展。
可以通过无人机器人实现对汽车的喷涂,从而减少人力成本,提高生产效率。
4. 环保化:随着对环境保护意识的提高,机器人喷涂将越来越注重对环境的保护。
机器人喷涂在汽车涂装中的应用

机器人喷涂在汽车涂装中的应用
随着汽车工业的发展,机器人技术不断应用于汽车制造的各个环节。
在汽车涂装过程中,机器人的应用也发挥着重要的作用。
机器人喷涂在汽车涂装中具有许多优势,可以提
高生产效率、降低成本、提高质量等,下面将介绍机器人喷涂在汽车涂装中的应用。
机器人喷涂在汽车涂装中可以提高生产效率。
传统的汽车涂装过程需要大量的人力,
而且需要进行复杂的操作。
而机器人喷涂可以精确控制喷涂速度、角度和涂层厚度,可以
实现高效的喷涂,并且不会出现喷涂不均匀、漏喷或浪费的情况,大大提高了生产效率。
机器人喷涂在汽车涂装中可以降低成本。
传统的汽车喷涂过程需要大量的劳动力投入,而且还需要进行培训和管理,成本较高。
而机器人喷涂可以减少人力投入,不需要进行培
训和管理,减少了人力成本。
机器人喷涂还可以控制涂层厚度和喷涂面积,节约了涂料的
使用量,从而降低了材料成本。
机器人喷涂在汽车涂装中还具有灵活性和可编程性。
机器人喷涂可以根据不同的汽车
型号、颜色和涂装要求进行调整,灵活适应不同的生产需求。
而且机器人喷涂还可以通过
编程来实现自动化控制和运行,提高了生产的柔性和效率。
汽车涂装工艺中的喷涂机器人编程技术

案例二:汽车发动机舱喷涂机器人编程
总结词
高温防护、复杂结构适应
VS
详细描述
汽车发动机舱喷涂机器人编程技术需考虑 高温和复杂结构的特点。该案例中,机器 人配备了特殊的高温防护装置,能够在高 温环境下稳定工作。同时,机器人能够适 应发动机舱内部的复杂结构,实现精细的 喷涂作业,提高了涂层的均匀性和附着力 。
障处理效率。
定期维护与保养
制定定期维护和保养计划,确保 机器人各部件处于良好状态,延
长使用寿命。
04
喷涂机器人编程技术案例分析
案例一:汽车车门喷涂机器人编程
总结词
精确控制、高效涂装
详细描述
汽车车门喷涂机器人编程技术通过精确控制喷涂机器人的运动轨迹和涂料流量, 实现了高效、均匀的涂装效果。该案例中,机器人按照预设的程序进行车门内外 表面的自动喷涂,减少了人工操作,提高了生产效率。
在汽车制造业中发挥更加重要的作用。
喷涂机器人编程技术的未来发展方向
跨界融合
未来喷涂机器人编程技术将与计算机视觉、传感器技术等领域进行 更深入的融合,实现更加智能化和自动化的涂装作业。
云端化
随着云计算技术的发展,喷涂机器人编程技术将逐步实现云端化, 通过云端数据共享和远程控制等方式,提高涂装作业的灵活性和效 率。
总结词:机器人编程语言是实现喷涂机器人控制的核心工具,提供了丰富的功能和库,用于实现机器 人的各种操作和控制。
机器人编程算法
机器人编程算法是用于指导机器人如何完成任务的算法集合。在汽车涂装工艺中,常用的算法包括路径规划、运动控制、传 感器数据处理等。这些算法通过优化机器人的运动轨迹、减少涂装过程中的涂料浪费、提高涂装效率等方式,实现高质量的 涂装效果。
喷涂机器人编程技术的挑战与机遇
喷涂机器人介绍

喷涂机器人通常采用先进的运动 控制系统和喷涂技术,能够实现 复杂轨迹的喷涂作业,同时具备 高效、环保、安全等优点。
喷涂机器人的应用领域
01
02
03
汽车制造
喷涂机器人广泛应用于汽 车制造领域的车体表面喷 涂作业,提高喷涂质量和 效率。
家具制造
在家具制造行业中,喷涂 机器人用于木质家具的表 面喷涂,提高喷涂质量和 效率。
02 喷涂机器人的工作原理
喷涂机器人的组成
机械臂
用于抓取和移动喷枪,实现喷 涂动作。
控制系统
控制机械臂的运动轨迹和喷枪 的工作状态,确保喷涂质量。
传感器
检械臂和喷枪所需的能源 和气源。
喷涂机器人的工作流程
定位
机器人通过传感器和控 制系统确定需要喷涂的
喷涂机器人能够适应各种复杂的工作环境和喷涂需求,实现高效、精准的喷涂作 业。在各个行业中,喷涂机器人都发挥着重要作用,提高了生产效率和产品质量 。
05 结论
总结
喷涂机器人是一种高效、精准的 自动化喷涂设备,广泛应用于汽 车、家具、建筑等行业的喷涂作
业。
喷涂机器人具有高精度定位、稳 定喷涂、高效生产等优点,能够 提高喷涂质量和效率,降低人工
未来喷涂机器人将更加注重环保和可 持续发展,采用更加环保的材料和工 艺,降低对环境的影响。
THANKS FOR WATCHING
感谢您的观看
喷涂机器人通常配备高精度的喷枪和稳定的控制系统,能够实现均匀、高质量的喷 涂效果,同时减少材料浪费和环境污染。
在汽车制造过程中,喷涂机器人可以快速、准确地完成车体各个部位的喷涂,包括 车身外部、内部和引擎部件等,显著提升了生产效率和产品质量。
家装行业的应用
喷涂机器人毕业设计论文

3)控制系统:控制系统的性能进一步提高,己由过去控制标准的6轴机器人发展到现在能够控制21轴,甚至27轴,实现了软件伺服和全数字控制。人机界面更加友好,基于图形操作的界面也己问世。编程方式仍以示教编程为主,但离线编程己在某些领域实现实用化。
1.3.1国内研究现状
我国的一些企业积极与高校开展喷涂机器人的项目合作,进一步推动我国喷涂机器人技术的成熟,普及与应用。 近年来国内亦拥有相当数量的喷漆机器人如南航研制的PR-1型喷漆机器人。喷漆机器人在国外早已广泛应用于汽车等产品的涂装生产线,国外机器人己取得的进展主要表现在如下几个方面:
1)操作机器人:通过有限元分析、模态分析及仿真设计等现代设计方法的运用,操作机器人己实现了优化设计。以德国KUKA公司为代表的机器人公司,己将机器人并联平行四边形结构改为开链式结构,拓展了机器人的工作范围,加之轻质铝合金材料的应用,大大提高了机器人的性能。此外采用先进的RV减速器及交流伺服电机,使机器人操作机几乎成为免维护系统。
本文设计的喷漆机器人采用了类似于铰链四杆机构的结构形式。驱动小臂运动的电机安装在腰部回转盘的上面,通过带动铰链四杆机构间接驱动小臂实现俯仰运动,这样避免了把液压缸直接安装在大臂和小臂的连接处,从而减小了小臂自身的重量,同时减小了驱动大臂和腰关节的液压缸所需要的功率与力矩,这种铰链四杆机构还使小臂实现自身的重力平衡从而减小了静力矩。喷漆机器人的主体采用了铝合金材料,减轻了自身的重量。喷漆机器人的整体动态性能也因此提高。
1.2喷涂机器人的特点及其发展现状
大部分机电类产品在其制造过程中,都涉及到表面涂装作业。对于传统机械行业(如机床、轻工机械、纺织机械、农业机械、起重机械、工程机械、矿山机械、冶金机械等)、电机电器行业(如电机、变压器、电控柜等)、仪器仪表行业、家电行业、以及交通运输行业等,用户对其产品外观质量的要求都很高,而表面涂装技术是达到这一要求的重要环节。对于某些机电产品如家电、轻工、汽车、摩托车等来讲,产品的外观质量甚至影响到该产品在市场上的竞争力,因此对表面涂装技术提出了更高要求。
汽车涂装工艺中的喷涂机器人应用

喷涂机器人能够快速、准确地完成喷涂工作,减少 了人工操作的时间和成本。
保证涂装品质
喷涂机器人能够实现精准的喷涂控制,减少了人为 因素对涂装品质的影响,提高了涂装的均匀性和一 致性。
降低对人工的依赖
喷涂机器人可以代替部分人工操作,降低了对人工 的依赖,使得生产过程更加稳定可靠。
喷涂机器人在汽车涂装中的具体应用场景
喷涂机器人具有高效率、高精度、高稳定性和低成 本等优点,能够显著提高汽车涂装工艺的生产效率 和产品质量。
喷涂机器人在汽车涂装中的应用范围
喷涂机器人还可以用于汽车零 部件的涂装,如发动机罩、车 轮等,以满足不同部位对涂装 的要求。
喷涂机器人广泛应用于汽车车 身、车底板、车门等部位的涂 装作业,能够实现快速、均匀 的喷涂效果。
喷涂机器人技术的未来发展方向
智能化
随着人工智能和机器学习技术的 不断发展,喷涂机器人将具备更 高级的自主决策和学习能力,能 够更好地适应复杂的工作环境和
任务需求。
柔性化
未来的喷涂机器人将更加注重柔 性化设计,能够快速适应不同的 车型和涂装工艺要求,提高生产
效率和灵活性。
高效能
随着能源技术的进步,喷涂机器 人的能耗将进一步降低,同时提
喷涂机器人对未来汽车工业的影响和推动作用
提高生产效率
推动汽车工业创新发展
喷涂机器人能够大幅提高汽车涂装工 艺的生产效率,缩短生产周期,降低 生产成本。
喷涂机器人的应用将推动汽车工业在 技术、工艺、材料等方面的创新发展 ,促进产业升级和转型。
提升产品质量
喷涂机器人能够实现高精度、高质量 的涂装效果,提升汽车产品的外观质 量和附加值。
喷涂机器人能够适应各种复杂形状和大小的工件,提 高涂装效率和产品质量。
喷涂机器人在汽车涂装中的应用调查
喷涂机器人在汽车涂装中的应用调查发布时间:2022-09-26T02:43:19.282Z 来源:《中国科技信息》2022年第33卷10期作者:刘文锋刘玉准[导读] 随着当今社会科技的突飞猛进,如今工控自动化水平越来越高。
在汽车生产制造过程中,刘文锋刘玉准东风柳州汽车有限公司广西柳州 545005摘要:随着当今社会科技的突飞猛进,如今工控自动化水平越来越高。
在汽车生产制造过程中,利用机械手搬运、焊接、喷涂已全面替代人工成为主流。
在汽车涂装界,防爆机器人加静电旋杯的喷涂方式备受行业的青睐,现在国内主机厂都开始采用机器人喷涂以替代手工喷涂。
关键词:涂装;车身;机器人。
喷涂机器人硬件结构方面各品牌都有很多相同之处,而软件系统集成及操作方面各有不同。
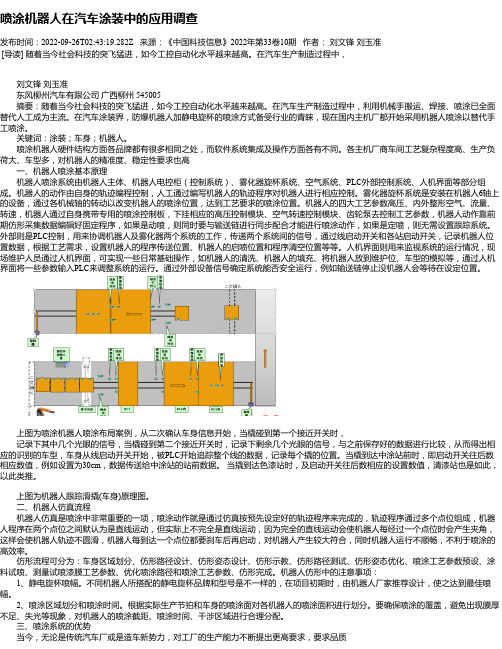
各主机厂商车间工艺复杂程度高、生产负荷大、车型多,对机器人的精准度、稳定性要求也高一、机器人喷涂基本原理机器人喷涂系统由机器人主体、机器人电控柜(控制系统)、雾化器旋杯系统、空气系统、PLC外部控制系统、人机界面等部分组成。
机器人的动作由自身的轨迹编程控制,人工通过编写机器人的轨迹程序对机器人进行相应控制。
雾化器旋杯系统是安装在机器人6轴上的设备,通过各机械轴的转动以改变机器人的喷涂位置,达到工艺要求的喷涂位置。
机器人的四大工艺参数高压、内外整形空气、流量、转速,机器人通过自身携带专用的喷涂控制板,下挂相应的高压控制模块、空气转速控制模块、齿轮泵去控制工艺参数,机器人动作靠前期仿形采集数据编辑好固定程序,如果是动喷,则同时要与输送链进行同步配合才能进行喷涂动作,如果是定喷,则无需设置跟踪系统。
外部则是PLC控制,用来协调机器人及雾化器两个系统的工作,传递两个系统间的信号,通过线启动开关和各站启动开关,记录机器人位置数据,根据工艺需求,设置机器人的程序传送位置、机器人的启喷位置和程序清空位置等等。
人机界面则用来监视系统的运行情况,现场维护人员通过人机界面,可实现一些日常基础操作,如机器人的清洗、机器人的填充、将机器人放到维护位、车型的模拟等,通过人机界面将一些参数输入PLC来调整系统的运行。
机器人喷涂在汽车涂装中的应用
机器人喷涂在汽车涂装中的应用随着汽车工业的发展和进步,喷涂工艺在汽车涂装中扮演着非常重要的角色。
而机器人喷涂作为现代汽车涂装流水线上的关键工艺,被广泛应用于汽车制造业中。
本文将介绍机器人喷涂在汽车涂装中的应用。
一、机器人喷涂的背景在过去,汽车喷涂主要依赖于人工操作,人工喷涂不仅效率低下,而且存在一定的质量问题。
而机器人喷涂技术的出现,使得喷涂工艺实现了全自动化,不仅大幅提升了喷涂精度和质量,而且提高了生产效率和效益。
机器人喷涂成为现代汽车涂装生产线中的关键技术。
机器人喷涂相比人工喷涂具有以下优势:1.高效性:机器人喷涂能够实现全自动化生产,不受工作时间和疲劳的限制。
机器人喷涂的速度远远快于人工喷涂,可以大幅提高生产率。
2.精度性:机器人喷涂能够通过预设的程序准确地完成每一次喷涂操作,确保了涂装质量的一致性。
而人工喷涂由于操作者的技术水平和疲劳程度的影响,存在一定的不确定性。
3.柔性性:机器人喷涂能够根据不同的喷涂要求进行灵活的调整,实现不同颜色、不同图案的喷涂。
而人工喷涂需要不同的喷涂技术和调整,操作相对繁琐。
4.安全性:机器人喷涂不需要人员直接接触喷涂物,减少了工作环境中的有害气体和健康风险。
机器人喷涂能够根据工作环境的要求进行调整和控制,提高了工作安全性。
5.节能环保:机器人喷涂相比人工喷涂能够减少喷涂液料的浪费,降低了环境污染和能源消耗。
1.汽车外观喷涂:机器人可以根据预设程序完成汽车外观的喷涂操作,确保涂装质量的一致性和稳定性。
由于机器人喷涂的高效性,能够大幅提高生产效率和降低生产成本。
2.汽车内饰喷涂:机器人可以完成对汽车内饰零部件的喷涂操作,如仪表盘、中控台等。
由于内饰零部件形状复杂,喷涂难度较大,人工喷涂难以保证喷涂质量。
而机器人喷涂可以根据不同的要求进行灵活的调整和操作,确保内饰喷涂的一致性和质量。
3.汽车组装过程中的喷涂:机器人可以在汽车组装过程中完成对特定零部件的喷涂操作,如发动机罩、门板等。
喷漆机器人应用技术研究与未来展望

1.3 经
1.2 移动式喷涂机器人
这类机器人主要用于高空的喷涂作业,如大楼、桥梁的高空喷涂等,配备缆绳、真空或磁吸附装置,充当机器人的下肢,使机器人能够在高空喷涂作业的同时进行移动。相关资料介绍一种缆索机器人,用于斜拉桥的高空喷涂,利用PLC作为机器人的控制系统,机器人系统运行稳定,可靠性高,可满足斜拉桥高空喷涂的需要。还有一种用于高层建筑喷涂作业的移动机器人,以真空吸附的方式进行高层建筑物的喷涂作业,机器人由支援系统、机器人本体、控制系统组成。其中支援系统包括移动小车、卷缆部件、悬挂装置;控制系统采PLC控制。机械手采用往复运动的方式,同时在喷涂机械手上还安装了两套CCD摄像系统,可从支援小车的监视器实时监视喷涂作业情况和墙面喷涂的质量。该机器人的推广应用提高了高层建筑喷涂作业的质量、工作效率和安全可靠性,降低工人的工作量。
随着机器人技术的不断完善,喷涂精度得到显著提高,喷涂机器人在主要的发达国家得到广泛的应用。我国的华南理工大学、华中科技大学等科研机构先后对喷涂机器人技术进行深入的研究,取得了不少进展。航天航空部的703所、625所使用热喷涂机器人进行作业,用来喷涂一些重要而特殊航空部件。目前在我国,还没有完全意义上的独立生产喷涂机器人的厂家,机器人市场大多为欧美、日本、韩国等国的生产厂家所垄断。近年来,我国的一些企业积极与高校开展喷涂机器人的项目合作,进一步推动我国喷涂机器人技术的成熟,普及与应用。
机器人喷涂在汽车涂装中的应用

机器人喷涂在汽车涂装中的应用
随着汽车工业的不断发展,汽车生产线也变得越来越复杂和高效。
当涉及到汽车涂装时,喷涂是一个非常重要的环节。
过去,汽车涂装主要依靠人工进行,但现在机器人在汽
车喷涂中的应用越来越普遍。
机器人喷涂具有速度快、质量稳定和效率高等优点,已经成
为汽车制造业的重要技术之一。
机器人喷涂在汽车涂装中的主要应用包括:底漆喷涂、面漆喷涂和清漆喷涂。
底漆喷涂是汽车制造过程中的一个重要环节。
底漆是为了保护车身表面,并为后续涂
装过程提供良好的附着力。
机器人喷涂能够实现底漆的快速高效涂装,可以在短时间内完
成大面积的底漆涂装工作。
由于机器人喷涂具有高度的精确性,可以精确控制涂装厚度和
均匀度,使得底漆涂装效果更加稳定和一致。
面漆喷涂是汽车制造过程中最关键的一个环节。
面漆决定了汽车的外观质量和观感。
传统的人工喷涂往往会导致色差和不均匀的问题,而机器人喷涂则可以有效解决这些问题。
机器人喷涂能够以极高的速度和精度进行喷涂,可以保证涂装的均匀性和一致性,避免色
差的出现。
机器人喷涂还可以通过调整颜料的喷射角度和喷射压力,以及控制涂装厚度来
实现不同的效果,比如实现金属漆和珍珠漆等特殊效果。
除了以上几个方面,机器人喷涂在汽车涂装中还有其他一些应用。
机器人喷涂可以用
于喷涂车身的局部修复,可以根据不同的瑕疵和损坏情况进行调整和修复,保证修复后的
涂装效果和整车涂装一致。
机器人喷涂还可以用于特殊的涂装需求,比如车身标志、图案等。
机器人喷涂在汽车涂装中的应用

机器人喷涂在汽车涂装中的应用
随着现代工业的发展,机器人越来越广泛地应用于各个领域。
在汽车涂装领域,机器人的应用已成为不可或缺的工具。
机器人可以帮助汽车制造企业实现高品质、高效率和低成本的涂装生产。
1. 高质量的涂装效果
机器人喷涂能够更好地控制涂料的喷洒,实现更加均匀、精细、稳定的涂装效果。
相较于人工喷涂,机器人具有更高的精度和重复性,能够减少涂料的浪费,节约资源和环保。
2. 精准的涂装位置和姿态
机器人喷涂能够准确识别和定位汽车的涂装位置和姿态,同时可以根据不同的涂装要求进行调整和控制。
通过使用传感器、光电探测器等技术手段,机器人能够快速、准确地识别位于不同位置的汽车部件,实现自动化的涂装操作。
3. 自动化的程序控制
机器人喷涂可以通过程序控制来实现不同工艺要求的涂装。
在涂装过程中,机器人可以自动调整喷涂速度、角度、压力等参数,以实现涂装的精度和均匀度。
同时,机器人还可以向操作人员发送涂装完成和维护保养等信息,方便管理人员进行实时监控和评估。
4. 提高工作效率和生产率
机器人在涂装过程中不需要休息和换班,可以实现连续不断的生产,提高生产率和工作效率。
此外,机器人还可以实现多工位操作,同时进行多个汽车部件的涂装,进一步提高生产效率。
总之,机器人喷涂在汽车涂装领域具有很高的应用价值。
它可以提高涂装的质量、效率和成本效益,同时也能够显著减少对环境的污染和资源的浪费。
随着机器人喷涂技术的不断发展和完善,相信它将会在未来的汽车涂装领域中发挥越来越重要的作用。
机器人喷涂在汽车涂装中的应用
机器人喷涂在汽车涂装中的应用随着科技的发展和机器人技术的成熟,机器人在各个领域得到了广泛应用,汽车制造业也不例外。
在汽车制造的生产流程中,涂装是一个非常重要的环节,它直接影响到汽车外观的质量和美观程度。
传统的涂装过程需要大量的人力,而且存在着一些缺陷,比如不稳定的喷涂质量,不均匀的涂装厚度等等。
而机器人喷涂技术的应用,则能很好地解决这些问题。
本文将就机器人喷涂在汽车涂装中的应用进行深入探讨。
一、机器人喷涂技术的特点1.高精度机器人在喷涂过程中能够根据预设的路径和参数进行准确的喷涂,实现高精度的涂装效果。
这对于一些对喷涂质量要求较高的汽车零部件来说,是非常重要的。
2.均匀性机器人喷涂技术能够保证涂料在整个涂装表面上的均匀分布,避免出现浓淡不均的情况。
这能够保证整个汽车外观的一致性,使得汽车看起来更加美观。
3.高效率相比于人工喷涂,机器人喷涂技术能够实现自动化喷涂,大大提高了生产效率,减少了人工成本。
而且机器人能够连续工作,不会因为疲劳而影响喷涂质量和效率。
4.安全性涂装工作涉及到一些有毒有害的涂料和溶剂,而机器人喷涂过程中可以避免工人接触这些有害物质,从而保证了工人的安全。
1.车身涂装汽车的车身是需要进行各种底漆、面漆、清漆等多道涂装工艺的。
这些工艺对于涂装的精度、厚度和均匀性都有着非常高的要求。
而机器人喷涂技术能够很好地满足这些要求,保证整车的外观质量。
2.零部件涂装汽车上还有很多需要喷涂的零部件,比如车门、车顶、引擎盖、保险杠等等。
这些零部件的涂装也同样需要高精度和均匀性。
机器人喷涂技术能够根据零部件的形状和尺寸进行精准的喷涂,保证了这些零部件的外观质量。
3.特种涂装有些汽车需要进行特种涂装,比如仿木纹、仿大理石、金属化等等,这些都需要特殊的喷涂工艺和技术。
机器人喷涂能够灵活地根据不同的要求进行喷涂,实现复杂的特种涂装效果。
1.智能化随着人工智能技术的发展,机器人喷涂技术也将会更加智能化。
未来的机器人将能够通过学习和优化算法,不断提升喷涂效率和质量。
喷涂机器人轨迹优化关键技术研究

喷涂机器人轨迹优化关键技术研究喷涂机器人作为一种重要的自动化喷涂设备,在汽车制造、家具行业、建筑工程等领域得到了广泛的应用。
随着机器人技术的不断发展,喷涂机器人的运动轨迹优化成为了一个备受的研究课题。
本文旨在探讨喷涂机器人轨迹优化的关键技术,以期提高喷涂效率和质量。
喷涂机器人在实际应用中,面临着许多优化问题。
其中包括:如何在确保喷涂质量的前提下,减少喷涂时间和能耗;如何提高喷涂机器人的路径规划和运动控制精度;如何降低对操作人员的依赖程度,提高自动化水平。
针对这些问题,本文对喷涂机器人轨迹优化的关键技术进行了研究。
喷涂机器人轨迹优化是一个多目标、多约束的问题。
其主要目标是在满足喷涂质量的前提下,最大化喷涂效率,同时降低能耗和机器人磨损。
为了解决这个问题,需要研究以下关键技术:路径规划:通过对喷涂机器人运动轨迹的优化,实现最短路径、最小时间、最小能耗等目标。
速度和加速度控制:在保证喷涂质量的前提下,通过对机器人速度和加速度的控制,实现运动轨迹的平滑过渡,提高机器人运动的稳定性和精度。
动态避障:在复杂环境下,喷涂机器人需要实时感知环境信息,避免与障碍物发生碰撞,保证喷涂过程的顺利进行。
本文提出了一种基于强化学习的喷涂机器人轨迹优化方法。
该方法通过让机器人在模拟环境中进行大量试错学习,寻找最优的运动轨迹。
具体实现步骤如下:构建一个喷涂机器人的模拟环境,包括各种形状和大小的障碍物、喷涂目标等。
设计一个强化学习算法,让机器人在模拟环境中不断尝试不同的运动轨迹,并对其进行评估。
根据评估结果调整机器人的运动轨迹,逐步寻找最优的运动轨迹。
当机器人找到最优轨迹时,将其应用于实际喷涂作业中,并对实际应用效果进行评估和反馈。
在模拟环境中进行实验,发现采用强化学习算法优化后的喷涂机器人在路径规划、速度和加速度控制以及动态避障等方面都取得了显著的效果。
具体来说,优化后的机器人减少了30%的喷涂时间和能耗,同时提高了20%的喷涂效率和质量。
机器人喷涂技术研究

机器人喷涂技术研究随着机器人技术的发展,机器人喷涂技术在工业制造领域得到了广泛的应用。
机器人喷涂技术的优点在于喷涂效率高、精度高、稳定性好、颜色均匀等特点,逐渐取代了传统的手工喷涂技术,成为一个不可忽视的技术发展趋势。
机器人喷涂技术的应用场景机器人喷涂技术在汽车制造、机器制造、建筑材料、家具制造等领域得到了广泛的应用。
在汽车制造领域,机器人喷涂技术可以实现车身的自动化喷涂,保证喷涂的颜色和涂层均匀,提高了生产效率。
在机器制造领域,机器人喷涂技术可以对机器的表面进行精细处理,保证了机器的质量和外观。
在建筑材料领域,机器人喷涂技术可以将材料表面进行涂装处理,防止外界因素的侵蚀,延长材料的使用寿命。
在家具制造领域,机器人喷涂技术可以实现家具涂装的一体化自动化生产,提高生产效率和产品质量。
机器人喷涂技术的发展现状目前,机器人喷涂技术的主要生产厂家有ABB、KUKA、FANUC等。
这些厂家的机器人喷涂技术在自动化生产中得到了广泛应用,并且不断进行技术升级和改进,加强了机器人的精准度和稳定性。
同时,随着机器人喷涂技术的普及,越来越多的企业开始关注机器人喷涂技术的应用,开发出了适合各自领域的机器人喷涂系统。
机器人喷涂技术的未来展望随着人工智能技术的不断进步和机器人喷涂技术的发展,机器人喷涂技术在未来将会得到更广泛的应用,并且取代传统手工喷涂技术成为主流。
未来,机器人喷涂技术将会进一步提高生产效率、降低成本、保证产品质量,成为推动工业制造的重要技术。
展望未来,机器人喷涂技术将不断发展和壮大,推动工业制造的升级换代。
我们要不断加强对机器人喷涂技术的研究和创新,优化机器人喷涂技术的性能和效率,打造高品质的自动化生产领域。
喷漆机器人油漆工艺建模的研究与系统实现的开题报告

喷漆机器人油漆工艺建模的研究与系统实现的开题报告一、选题背景及意义近年来,随着制造业的快速发展和智能化的推进,自动化生产已成为制造业发展的必然选择。
其中,喷漆作为涂装工序中不可或缺的环节,自动化喷漆技术越来越受到人们的关注和重视。
传统的手工喷漆存在着效率低、质量难以稳定控制等难题,自动喷漆机器人的出现有效地解决了这些问题,大大提高了效率和精度。
因此,喷漆机器人在汽车、电子、机械及家具等行业中得到广泛应用。
然而,在喷漆机器人的应用过程中,机器人喷漆的质量受到很大的限制。
如何通过科学的油漆工艺建模,优化喷漆参数,提高喷漆质量,以满足产业生产的需求,对于喷漆机器人的应用具有重要的意义。
因此,喷漆机器人油漆工艺建模的研究与系统实现是当前制造业实现智能化生产的重要研究领域。
二、研究内容及方法本文将以汽车行业为例,从喷漆机器人的操作流程入手,分析影响喷漆质量的关键因素,包括油漆物理属性、喷嘴参数、喷漆距离、气压、喷漆速度等,建立喷漆机器人的传统喷漆质量模型和机器学习模型,并通过实验对比分析,选择更优的模型来预测喷漆机器人的喷漆质量。
具体来说,本文的研究内容包含以下几个方面:1. 喷漆机器人操作流程分析对喷漆机器人的操作流程进行梳理,理清油漆的喷涂原理和过程,明确影响喷漆质量的关键因素。
2. 喷漆机器人油漆工艺建模结合前期的操作流程分析和实验数据分析,建立传统数学模型和机器学习模型,并运用R、PYTHON等工具进行模型设计和实现。
3. 实验设计和分析设计一系列喷漆机器人的实验,得到针对不同情况下的喷漆质量数据,并利用所建的模型对其进行分析和预测,以便对实际应用场景的喷漆工艺优化提供支持。
三、预期研究成果通过本文的研究,预期实现以下成果:1. 喷漆机器人操作流程规范化,使喷漆操作更加系统化和规范化。
2. 建立喷漆机器人的油漆工艺模型,通过数学模型和机器学习模型对其进行预测和评估,提高喷漆机器人喷漆质量的精度和稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第38卷 第11期2004年11月 西 安 交 通 大 学 学 报J OU RNAL OF XI′AN J IAO TON G UN IV ERSIT YVol.38 №11Nov.2004面向汽车覆盖件模具快速开发的金属喷涂机器人研究何仲 ,卢秉恒,朱东波,王伊卿,洪 军(西安交通大学机械工程学院,710049,西安)摘要:提出了一种新型的机器人手腕机构和基于STL(Stereolithography)模型分层数据的运动控制技术,在此基础上,研制了基于金属电弧喷涂和电刷镀技术的快速制模工业机器人.该机器人为5自由度直角坐标型结构,手腕采用了通过特别设计的一个连杆机构,当利用该手腕机构调节电弧喷枪的姿态时,喷枪工作点的空间位置会保持不变,因此解决了在传统机器人中姿态调节机构与位置机构存在的非线性运动耦合的问题.机器人以模具STL模型的分层数据作为控制系统的输入,无需人工编程即可自动完成金属电弧喷涂和电刷镀模具制造工艺.在汽车新车型开发和样车试制中,应用该机器人制作覆盖件模具,可以显著降低开发成本,缩短试制周期.关键词:汽车覆盖件模具;金属电弧喷涂机器人;手腕机构;运动控制中图分类号:TP24212;TG305 文献标识码:A 文章编号:0253-987X(2004)11-1173-05Novel Metal Arc Spraying Robot for R apid Tooling of Large2SizedAutomobile Body Panel DiesHe Zhongyun,L u B i ngheng,Zhu Dongbo,W ang Yiqi ng,Hong J un(School of Mechanical Engineering,Xi′an Jiaotong University,Xi′an710049,China)Abstract:A creative robot wrist consisting of link mechanisms and a novel robot motion control method based on cross2sectional vector contours of STL2formatted model was proposed.By using the wrist and the control method,an industrial robot of five degrees of freedom for rapid tooling by using metal arc spraying and electric brush plating techniques was developed.The wrist of the robot including a special designed link mechanism can maintain the position of the spraying point on the surface of the master pattern whatever alternating the orienta2 tion of the gun.Therefore the kinematic nonlinear coupling between the position mechanism and orientation mechanism of traditional robot can be avoided.The only input of the control system is the STL2formatted3D CAD model of the pattern.Without any manual programming,the metal arc spraying and brush plating(if nec2 essary)processes can be performed automatically and efficiently after receiving the3D CAD data of the pattern. Using this robot system in new car development and trial production,the cost and lead2time can be reduced sub2 stantially as compared with the conventional tool making method.K eyw ords:automobile body panel dies;metal arc sprayi ng robot;w rist mechanism;motion cont rol 汽车样车试制模具(覆盖件简易模具)的制造直接决定着新车型开发的成本和周期.但是,在国内外覆盖件金属模具的主流制造技术中,如消失模铸造技术、大型精密数控铣削加工技术、高速数控铣削加工技术等,由于存在着生产周期长、费用高的问题,因此难以满足样车试制和小批量生产的要求.目前,国内外都在寻求成本低、周期短的覆盖件模具试制技术,根据材料与制作方法的不同,这些覆盖件模具收稿日期:2004-03-31. 作者简介:何仲 (1967~),男,博士生;卢秉恒(联系人),男,教授,博士生导师. 基金项目:国家高技术研究发展计划资助项目(2001AA421270);国家科技攻关“十五”计划专项经费重点资助项目(2001BA203B10-01).可分为树脂模具、金属喷涂模具、低熔点合金铸造模具,以及基于层叠法制造的薄钢板层叠模具和高密度混泥土模具(模具的工作表面为金属粉强化聚合物)等[1-3].在这些覆盖件模具的制造方法中,近年来发展起来的金属电弧喷涂制模方法对于大中型模具的制造在周期和成本方面具有很大的优势,并且模具工作表面具有较好的强度、硬度和耐磨性,因此是制造汽车覆盖件试制模具的一种较为理想的方法[4].本文提出了一种新型的机器人手腕机构和基于STL模型分层数据的运动控制技术,在此基础上研制了基于金属电弧喷涂和电刷镀技术的快速制模工业机器人.此外,还介绍了利用该机器人系统快速制造汽车覆盖件喷涂模具的一个实例.1 制模工艺与电弧喷涂制模系统的构成金属电弧喷涂快速制模是一种复形法制模技术,它以一个实物模型(或称为原型)作为母模,以电弧为热源,通过高速气流将熔融状态的金属材料雾化,并使其喷射、沉积在母模表面上,形成一定厚度的致密金属涂层.涂层拷贝了原型的形状,获得了所需的模具型腔,在完成补强、脱模、抛光等后处理工艺后,即可完成模具的快速制造.母模可以是快速原型或过渡模型,以及产品实物或通过高速数控加工得到的木材、石膏等非金属模型.电刷镀技术作为一种可选的后处理工艺,可以在模具工作表面刷镀强化涂层[5].金属电弧喷涂快速制模工艺需要控制2类参数:①对运动参数的控制,主要是对电弧喷枪(或镀笔)的位姿和轨迹控制;②对电弧喷涂(或电刷镀)工艺参数的控制,即对非运动量的控制.电弧喷涂工艺参数主要包括:喷涂电压、电流、空气压力、喷涂距离和喷枪运动速度等.电刷镀工艺参数包括:刷镀电流、电刷镀笔的相对运动速度和刷镀液的流速等.这2种工艺的运动量和非运动量参数都需要通过实验来实现参数优化.金属电弧喷涂快速制模系统的构成如图1所示,机器人机械本体为5自由度直角坐标型结构,定位机构采用龙门式结构,用于实现喷枪或镀笔的空间定位.由于在机器人的手腕上采用了一个特别设计的连杆机构,因此在机构上避免了姿态调节与空间定位的运动耦合.温度传感器为实时控制喷涂区温度提供了涂层温度信息,控制系统采用工业PC 机加运动控制卡的开放式数控结构模式,运动控制器主控芯片采用DSP(Digital Signal Processor),控制系统为主从式控制结构,工控机负责人机交互接口的管理、分层数据处理和控制系统的实时监控等工作.由下位机运动控制器来完成控制(运动量和非运动量)的所有细节,这样工控机与运动控制器上的DSP就共同构成了双CPU控制系统的硬件结构.(a)金属电弧喷涂制模系统的构成(b)机器人执行喷涂作业图1 电弧喷涂和电刷镀技术的快速制模系统2 关键技术2.1 机器人的手腕机构典型结构的机器人手腕有2类:①由液压马达直接驱动构成;②由齿轮传动构成.对于齿轮传动类型,又有球面齿轮、直齿轮和锥齿轮等.目前,使用较多的是3自由度手腕,它大多采用多轴差动轮系构成.由于各种手腕机构与机器人的位置机构存在着非线性运动耦合,即在进行手部姿态调节时,将改变机器人手部的空间位置,因此位置控制算法相对比较复杂,必须在控制算法中加以补偿.金属电弧喷涂机器人采用了一种新型的、与位置机构运动解耦的姿态调节机构,其示意图如图2所示.姿态调节手腕由回转轴Ⅰ和连杆机构AB CE2 FGD构成,具有2个转动自由度.AB CEFGD的基本结构形式是一个由5个活动构件和7个回转运4711西 安 交 通 大 学 学 报 第38卷 (a )手腕机构运动简图 (b )Ⅰ轴与Ⅱ轴相交于P 点(c )Ⅰ轴与Ⅱ轴共面A 、B 、C 、D 、E 、F 、G :连杆机构;P :锥顶点;φ:锥顶角;θ:Ⅰ轴转角图2 金属电弧喷涂机器人姿态调节手腕机构动副构成的连杆机构,其中由AB CD 构成第1个平行四边形,由CEFG 构成第2个平行四边形.图中所示的末端执行器是电弧喷枪,根据末端执行器的需要,可以增加绕其轴线(平行于EF 杆)的回转自由度,从而构成3自由度手腕.姿态调节机构工作原理如下:Ⅰ轴为A D 杆,Ⅱ轴为EF 杆,Ⅰ轴轴线与Ⅱ轴轴线相交于P 点,P 点就是机器人手部末端执行器的工作点位置,连杆机构一旦设计完成,则P 点相对于手腕的空间位置就完全确定了,且A P 与B E 的长度相等.对于喷枪,P 点就是模具表面上的喷涂焦点,对于刷镀笔,P 点就是与模具表面接触的刷镀笔的中心点.由图2可知,AB 杆转动将带动喷枪(或刷镀笔)作绕P 点的转动,Ⅰ轴转动与AB 杆摆动共同作用,将驱使电弧喷枪作圆锥运动,以喷枪轴线为母线,改变φ与θ的大小,就可以调节喷枪的姿态,理论上喷枪轴线可以位于过P 点的任意方向.在改变喷枪姿态的时候,由机器人位置机构确定的喷涂工作点P 的空间位置将始终保持不变,从而在机构上实现了位置机构与姿态调节机构的运动解耦,解决了传统的姿态调节机构与位置机构存在的非线性运动耦合问题,因此可以极大地简化机器人的运动分析和控制算法.通过增加虚约束,可以克服平行四边形机构在原动件与机架共线时存在的运动不确定性问题,如采用双平行四边形机构或者齿轮机构等.2.2 基于ST L 模型分层数据的运动控制策略2.2.1 喷涂制模工艺对喷枪运动的要求 如图3所示,在金属电弧喷涂制模过程中,喷枪相对于母模表面运动所具有的特点为:①喷涂距离H 是一个非常重要的工艺参数,同时又是机器人的一个运动参数,喷枪与模具型面之间需要始终保持一个适当的法向距离,因此H 需要通过实验来确定和优化,可以通过调整喷枪在EF 杆上的位置来实现(见图2a );②喷枪应动态地与被喷涂表面保持垂直姿态,目的是为了提高金属的沉积效率并保证金属涂层组织的致密、均匀性,从而使涂层具有较好的机械性能,实际喷涂过程中要求喷枪的法矢偏差角度不大于±15°;③模具表面的微小特征可以忽略.当电弧喷涂时,金属喷射流呈一定的发散角喷出,当喷枪与模具表面间的H =120~200mm 时,在母模表面形成直径为40~100mm 的圆形喷涂区.因此,对于喷(a )喷涂工艺对喷枪位姿的要求(b )喷涂作业实例图3 电弧喷涂工艺过程5711 第11期 何仲 ,等:面向汽车覆盖件模具快速开发的金属喷涂机器人研究涂工艺,在生成喷枪最终运动路径以前,可以对模具型面数据或喷枪运动路径数据进行平滑处理[4].由于刷镀笔与电弧喷枪的工作点具有完全相同的运动轨迹,不同之处仅在于刷镀笔与母模表面之间需要保持接触,即刷镀笔的H=0,因此这2种工艺控制方法完全相同.2.2.2 STL模型的分层全息数据 STL文件格式是对三维实体模型表面的一种近似表达方法,它采用所谓面型化的处理方法对实体曲面进行近似处理,即用一系列空间小三角面片来表示三维实体模型的表面,每一个小三角面片用三角形的3个顶点坐标及三角面片的法向矢量来描述.根据电弧喷涂工艺和喷枪运动的特点,将喷枪运动路径确定为平面曲线,因此喷涂机器人的运动控制数据可以通过平面与模具型面的求交运算来获得.直接对模具的CAD模型进行求交运算可以获得精确的喷枪运动轨迹,但计算复杂,对于喷涂工艺,这不仅没有实质性意义,而且模具表面的微小细节还可能不利于喷枪的平稳运动.因此,选择将模具的CAD模型首先转换为STL模型,然后再进行平面求交运算,可使问题得到简化.图4给出了STL模型获取机器人控制数据的流程.图4 STL模型分层处理后自动生成的机器人运动控制数据 由于传统的快速成形系统对STL模型分层处理后所得到的层轮廓数据是一系列首尾相接的平面直线段,但是金属电弧喷涂工艺要求喷枪在工作中与模具表面保持垂直,因此电弧喷涂快速制模系统中所使用的分层数据必须包含每一直线段的法向矢量,即把标准STL模型经分层处理后所获得的包含法矢的层轮廓数据称为“分层全息数据”.2.2.3 喷涂轨迹文件的自动生成与喷枪的运动控制 分层全息数据给出了喷涂机器人末端执行器-电弧喷枪在作业过程中的所有位姿(见图5a),末端P(见图2)的轨迹由一系列首尾相接的平面直线段构成.在分层全息数据文件中,法向量是用半径为1的单位球面上的一个点来表示,法向量的另一个点默认为模型所在坐标系的原点,方向由原点指向外侧.由于喷涂机器人在机构上避免了姿态调整与空间定位的运动耦合关系,所以其运动控制算法非常简便.在用于电弧喷枪位姿控制的5个坐标(x,y,z,θ,φ)中,其中位置坐标与分层全息数据文件中节点的三维坐标是一一对应的,可通过坐标的平移运算求得.如果在分层处理前,将模具CAD模型的参考坐标系设为机器人的工作坐标系,则分层处理得到的三维坐标就无需平移,可直接用于喷枪位置的控制.姿态调整并不影响机器人的空间定位,其坐标需要根据线段上的法向量通过计算求得.设机器人手腕上2根轴的运动范围分别为θ=[0~360°],φ=[0~90°],如图5b所示,则喷枪姿态的坐标计算式如下所述.当nz i>0,ny i>0时θ=(180/π)arccos(nxi /sinφ)(1)φ=(180/π)arccos(nzi)(2)当nz i>0,ny i<0时θ=360-|(180/π)arccos(nxi/sinφ)|(3)φ=(180/π)arccos(nzi)(4)(a)STL模型的分层数据(b)机器人位姿坐标的计算V i(i=1,2,3,4):喷枪在直线段上的姿态;x i、y i、z i、P i(i=1,2,3,4):喷涂点的位置;O1:投影点图5 电弧喷枪位姿坐标的计算6711西 安 交 通 大 学 学 报 第38卷 当法向量在(nx i ,ny i ,nz i )中存在0坐标值时,逆向求解会出现奇异与退化现象,此时需要综合考虑3个坐标分量的情况.在得到喷枪的位置与姿态坐标后,按照(x ,y ,z ,θ,φ)坐标的顺序逐点进行排序,即可自动生成喷涂轨迹文件.由于喷枪路径为平面曲线,因此进行5轴4联动插补运算,即可控制喷枪按照要求来完成喷涂作业.3 汽车覆盖件模具制作实例图6给出了某汽车发动机盖板拉伸模的制作实例,制作比例为1∶1.首先,根据模具的三维CAD 数据通过高速数控加工制作出模具的石膏原型,然后进行喷涂前的预处理,即烘干、打磨、抛光及刷脱模剂等.经过预处理的石膏原型被送到喷涂机器人的工作平台上,进行金属电弧喷涂,喷涂结束后,再进行补强、脱模、抛光等后处理工艺.根据需要,还可(a )石膏原型的制作(b )金属喷涂模具(c )模具调试(d )合格的冲压样件(e )钢模具图6 汽车发动机盖板模金属喷涂模具及钢模具制作以对喷涂模具表面刷镀强化涂层,从而完成发动机盖板喷涂模具的制作.模具的制作耗时约3个星期,成本为115万元左右.如果按照传统方法制作该零件的钢模具,则需要约3个月时间和约25万元的费用.经试制检验,合格覆盖件模具的三维模型数据可以直接用于数控加工最终的钢模具,因此保证了钢模具制作一次成功,避免了在钢模具制作上的反复,进而缩短了新车型的开发周期,降低了开发成本.4 结 论本文提出的与位置机构运动解耦的手腕机构,以及基于STL 模型分层全息数据的运动控制方法,在金属电弧喷涂机器人中都得到了成功的应用.本文研究的机器人的运动分析简便,控制算法简单,无需人工编程,喷涂轨迹可自动生成,进一步提高了工作效率.该机器人的制模系统实现了金属电弧喷涂和电刷镀制造工艺的集成,可以对电刷镀和电弧喷涂过程的工艺参数实现控制,从而实现了2种工艺的高效、自动化作业,为金属电弧喷涂模具的制造质量提供了保证.案例研究表明,金属电弧喷涂制模机器人可以实现大型汽车覆盖件模具的自动、快速制造,且成本低、周期短.经试制检验,合格覆盖件模具的三维模型数据还可以用来加工钢模具,因此避免了在钢模具制作上的反复,可保证钢模具一次加工成功,从而缩短了新车型的开发周期,降低了开发成本.参考文献:[1] Takeo Nakagawa.Advances in prototype and low volumesheet forming and tooling [J ].Journal of Materials Pro 2cessing Technology ,2000,98(2):244-250.[2] Margaret B V S.Rapid tooling 2another better idea fromford[J ].Forming and Fabricating ,2002,9(5):29-34.[3] Cheah C M ,Chua C K ,Lee C W ,et al.Ra pid sheetmetal manufacturing ,part 1:indirect rapid tooling [J ].Advanced Manufacturing Technology ,2002(19):411-417.[4] 朱东波.基于RP 技术的板料成形模具快速制造系统研究[D ].西安:西安交通大学机械工程学院,2001.[5] 何仲 ,朱东波,唐一平,等.基于电弧喷涂和电刷镀的快速制模技术[J ].模具工业,2003(12):43-47.(编辑 管咏梅)7711 第11期 何仲 ,等:面向汽车覆盖件模具快速开发的金属喷涂机器人研究。