第十二 章 《 简单机械》 复习要点
最新人教版八年级下册物理第十二章简单机械知识点

第十二章简单机械12.1 杠杆1、杠杆(1)杠杆的概念:。
(2)杠杆的五要素:。
支点:;动力:;阻力:;动力臂:;阻力臂:。
说明:a、杠杆不一定是直的,但必须是硬棒;b、支点一定在杠杆上,力臂不一定在杠杆上;c、动力、阻力的作用点都在杠杆上。
(3)力臂:力的作用线到转动轴的垂直距离。
画法:①;②;③;④;⑤。
注意:力臂若画成实线,实线要在线段的两端画箭头,再标上l;虚线要用大括号括起来再标l。
2、杠杆平衡:杠杆在动力和阻力的作用下或。
探究杠杆平衡条件的实验中:(1)首先要调节使杠杆在不挂钩码时,保持,达到平衡状态。
这样做的好处是:①②。
(2)多次测量的目的是:。
(3)处理数据用力和力臂相乘而不相加是因为。
(4)结论:杠杆平衡的条件:即:。
3、做关于杠杆题时的注意事项:(1)必须先找出并确定支点(2)对力进行分析,从而确定动力和阻力(3)找出动力和阻力的作用线,确定动力臂和阻力臂。
412.2 滑轮1、滑轮:边缘有凹槽,能绕轴转动的小轮。
2、定滑轮①定义:工作时,轴不随物体移动的滑轮。
②实质:。
③特点:使用定滑轮,但。
④绳子自由端通过的距离与重物上升高度关系:。
3、动滑轮①定义:工作时,轴随着物体移动的滑轮。
②实质:动力臂为阻力臂的杠杆。
③特点:使用动滑轮,但。
④理想的动滑轮(不计轴间摩擦和动滑轮重力)则:;只忽略轮轴间的摩擦,则:。
⑤绳子自由端通过的距离与重物上升高度关系:。
4、滑轮组①定义:定滑轮、动滑轮组合成滑轮组。
②特点:。
③理想的滑轮组(不计轮轴间的摩擦和动滑轮的重力)拉力:。
即:用滑轮组提升重物时,动滑轮上有几段绳子承担物重,提升起物体的力就是物重的。
只忽略轮轴间的摩擦,则拉力:。
④绳子自由端通过的距离与重物上升高度关系:。
⑤组装滑轮组方法:首先根据公式求出绳子的股数,然后根据“奇动偶定”的原则,结合题目的具体要求组装滑轮。
说明:绳子段数n:在定滑轮和动滑轮中间画一条线,将定滑轮与动滑轮分隔开,数出动滑轮上的绳子段数,即为吊着重物的绳子段数。
第十二章简单机械知识点总结

简单机械第十二章一、杠杆在力的作用下绕着固定点转动的硬棒叫杠杆。
1定义:说明:①杠杆可直可曲,形状任意。
②有些情况下,可将杠杆实际转一下,来帮助确定支点。
如:鱼杆、铁锹。
2五要素──组成杠杆示意图。
O①支点:杠杆绕着转动的点。
用字母表示。
使杠杆转动的力。
用字母F表示。
②动力:1表示。
③阻力:阻碍杠杆转动的力。
用字母F 2④动力臂:从支点到动力作用线的距离。
用字母 L 表示。
1表示。
⑤阻力臂:从支点到阻力作用线的距离。
用字母L2画力臂方法:一找支点、二画线、三连距离、四标签。
3研究杠杆的平衡条件: )杠杆平衡指:杠杆(。
静止)或 (匀速转动水平位置)平衡。
这样做的目的是:可以方实验前:应调节杠杆两端的螺母,使杠杆在(便的从杠杆上量出力臂。
结论:杠杆的平衡条件(或杠杆原理)是:=LL 动力×动力臂=阻力×阻力臂。
写成公式FL=F也可写成:F/F/L。
11121222.分类:4 应用举例优缺点征构特名称结省力省力、费距离撬棒、铡刀、动滑轮、轮轴、羊角锤、钢丝钳、手推车动力臂大于阻力臂杠杆费力缝纫机踏板、起重臂、人的前臂、理发剪刀、钓鱼杆动力臂小于阻力臂费力、省距离杠杆等臂不省力不费力动力臂等于阻力臂天平,定滑轮杠杆达标检测:将杠杆放在水平面上后,发现右端比左端低,这时,应将、在“探究杠杆平衡条件”的实验前,1(1)来改变阻力和动力的来改变力臂的,靠增减 _____右端螺母向边调;实验中是靠移动大小的。
2、.如图3=0.4m,将重30N的物体悬OB=0.3m为支点,所示,OB 为一轻质杠杆,OOA,(__ 的拉力,点至少需加在点,挂在B当杠杆在水平位置平衡时,A __ N这是一个选杠杆或费力“”)”省力“填.3图天平;铡刀;3、下列工具中:(1)镊子;(2)羊角锤;(3)(4)理发剪刀;(5)裁衣剪刀;(6)起重机的起重臂;(7)大扫帚;(8)筷子;(9)剪铁皮的剪刀;(10)道钉撬;(11)火钳;(12),属于等臂杠杆的汽车的脚踏板.其中属于省力杠杆的是_______ _______(13)撬棒;(14) ._______ ______________,属于费力杠杆的是(填序号)是二、滑轮1.定滑轮:①定义:中间的轴固定不动的滑轮。
(完整版)第十二章简单机械知识点总结

第十二章简单机械—、杠杆(1)定义:在力的作用下绕着固定点转动的硬棒叫杠杆。
说明:①杠杆可直可曲,形状任意。
②有些情况下,可将杠杆实际转一下,来帮助确定支点。
如:鱼杆、铁锹。
(2)五要素一一组成杠杆示意图。
①支点:杠杆绕着转动的点。
用字母0表示。
②动力:使杠杆转动的力。
用字母F i表示。
③阻力:阻碍杠杆转动的力。
用字母F2表示。
说明:动力、阻力都是杠杆的受力,所以作用点在杠杆上。
动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反。
④动力臂:从支点到动力作用线的距离。
用字母L i表示。
⑤阻力臂:从支点到阻力作用线的距离。
用字母L2表示。
(3)画力臂方法:一找支点、二画线、三连距离、四标签。
⑴找支点0⑵画力的作用线(虚线);⑶画力臂(虚线,过支点垂直力的作用线作垂线);⑷标力臂(大括号)。
(4)研究杠杆的平衡条件:杠杆平衡是指:杠杆静止或匀速转动。
实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡。
这样做的目的是:可以方便的从杠杆上量出力臂。
结论:杠杆的平衡条件(或杠杆原理)是:动力X动力臂二阻力X阻力臂。
写成公式F i L i=HL2也可写成:F i/F2=L2/L i 解题指导:分析解决有关杠杆平衡条件问题,必须要画出杠杆示意图;弄清受力与方向和力臂大小;然后根据具体的情况具体分析,确定如何使用平衡条件解决有关问题。
(如:杠杆转动时施加的动力如何变化,沿什么方向施力最小等。
)解决杠杆平衡时动力最小问题:此类问题中阻力X阻力臂为一定值,要使动力最小,必须使动力臂最大,要使动力臂最大需要做到:①在杠杆上找一点,使这点到支点的距离最远;②动力方向应该是过该点且和该连线垂直的方向【习题】1.下列测量工具没有利用杠杆原理的是( )A.弹簧测力计B.杆秤C. 台秤D. 托盘天平2. 如图是小龙探究“杠杆平衡条件”的实验装置,用弹簧测力计在C处竖直向上拉,杠杆保持平衡。
若弹簧测力计逐渐向右倾斜,仍然使杠杆保持平衡,拉力F的变化情况是( )A .变小B . 变大C. 不变D. 无法确定3. (1)人要顺时针翻转木箱,请画出用力最小时力臂的大小。
新人教版物理第12章 简单机械 知识点导学
第十二章简单机械(知识点)第1节杠杆一、杠杆1、定义:一根硬棒,在力的作用下能绕着转动,这根硬棒就是杠杆2、几个名词O ——杠杆绕着转动的点;F1——使杠杆转动的力F2——阻碍杠杆转动的力l1——从支点到动力作用线的距离l2——从支点到阻力作用线的距离。
二、杠杆的平衡条件1、杠杆平衡:当杠杆在动力和阻力作用下保持或时,我们就说杠杆平衡了。
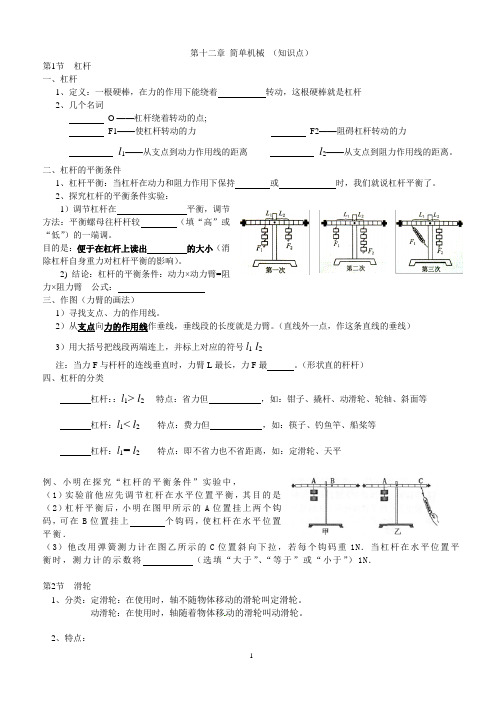
2、探究杠杆的平衡条件实验:1)调节杠杆在平衡,调节方法:平衡螺母往杆杆较(填“高”或“低”)的一端调。
目的是:便于在杠杆上读出的大小(消除杠杆自身重力对杠杆平衡的影响)。
2) 结论:杠杆的平衡条件:动力×动力臂=阻力×阻力臂公式:三、作图(力臂的画法)1)寻找支点、力的作用线。
2)从支点向力的作用线作垂线,垂线段的长度就是力臂。
(直线外一点,作这条直线的垂线)3)用大括号把线段两端连上,并标上对应的符号l1 l2注:当力F与杆杆的连线垂直时,力臂L最长,力F最。
(形状直的杆杆)四、杠杆的分类杠杆::l1> l2特点:省力但,如:钳子、撬杆、动滑轮、轮轴、斜面等杠杆:l1< l2特点:费力但,如:筷子、钓鱼竿、船桨等杠杆:l1= l2特点:即不省力也不省距离,如:定滑轮、天平例、小明在探究“杠杆的平衡条件”实验中,(1)实验前他应先调节杠杆在水平位置平衡,其目的是(2)杠杆平衡后,小明在图甲所示的A位置挂上两个钩码,可在B位置挂上个钩码,使杠杆在水平位置平衡.(3)他改用弹簧测力计在图乙所示的C位置斜向下拉,若每个钩码重1N.当杠杆在水平位置平衡时,测力计的示数将(选填“大于”、“等于”或“小于”)1N.第2节滑轮1、分类:定滑轮:在使用时,轴不随物体移动的滑轮叫定滑轮。
动滑轮:在使用时,轴随着物体移动的滑轮叫动滑轮。
2、特点:定滑轮:(实质是个等臂杠杆)动滑轮:(实质是个省力杠杆)3、滑轮组1)定义:把定滑轮和动滑轮组合在一起,就组成滑轮组。
新课标初中物理第12章简单机械知识点

新课标初中物理第12章简单机械知识点一、概念1.机械:是利用人力或者动力使物体发生位移和改变形状的设备。
2.简单机械:指那些由几个基本零件组成的机械装置,其通过物体上的运动来改变应用在它上面的力的大小、方向或作用点位置,从而减小应用在物体上的力,或者改变物体方向的机械。
二、六大简单机械分类1.杠杆:是一种用来转动的刚性杆。
2.轮轴:由轴和围绕轴转动的圆圈组成,用来传递力和运动。
3.楔子:是一个斜面,用来分割物体,改变物体的移动方向。
4.螺旋:是一种斜面绕着轴旋转,用来移动物体或者固定物体。
5.机械组合:将不同的简单机械组合在一起使用。
6.滑轮:由一个轮轴和围绕轮轴转动的圆圈组成。
三、杠杆1.杠杆的定义:杠杆是一种刚性杆,有一个旋转支点。
2.寻找力矩平衡条件:力矩平衡条件是指在杠杆平衡时,乘力距离旋转支点的乘积相等。
3.三类杠杆:按照不同位置的力和支点的位置,可以分为一级杠杆、二级杠杆和三级杠杆。
四、轮轴1.轮轴的定义:轮轴是实现物体转动的一种机械。
2.牛顿第二定律在轮轴上的应用:物体受力时,其加速度与受力大小成正比,与物体质量成反比。
3.两种力的传递方式:通过绳子或者传送带传递力以及通过轮轴的齿轮传递力。
五、楔子1.楔子的作用:楔子通过将物体分割成两部分,改变物体的方向。
2.原理:楔子由一个斜面构成,通过施加力将物体分开。
六、螺旋1.螺旋的定义:螺旋是一种斜面,绕着轴旋转。
2.螺旋的两个主要应用:1)将力转换为运动;2)将运动转换为力。
七、机械组合1.机械组合的定义:将不同的简单机械组合在一起,以完成特定的任务。
2.例如:组合使用杠杆和滑轮来提高单位力的作用效果。
八、滑轮1.滑轮的定义:滑轮是由一个轮轴和圆圈组成,用来传递力和运动。
2.滑轮的作用:改变力的方向、改变力的大小、提高力的效果。
通过对简单机械知识点的学习,我们可以更好地理解物体上的力、运动和运动过程中的能量转化,进一步认识到机械在日常生活中的重要性和应用。
初中物理第十二章简单机械知识点大全
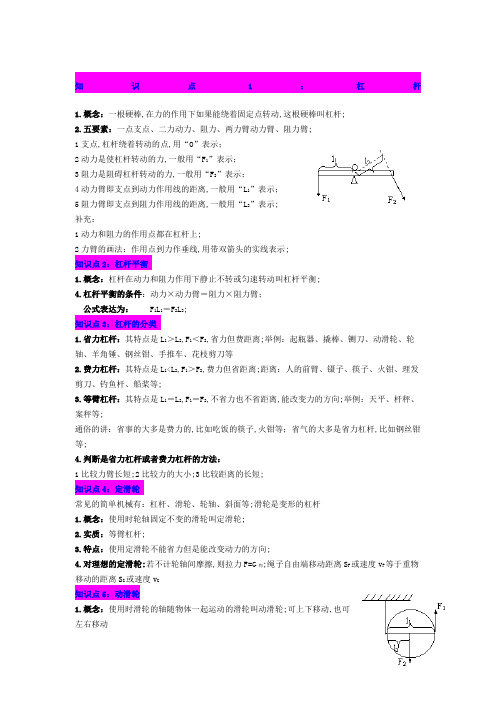
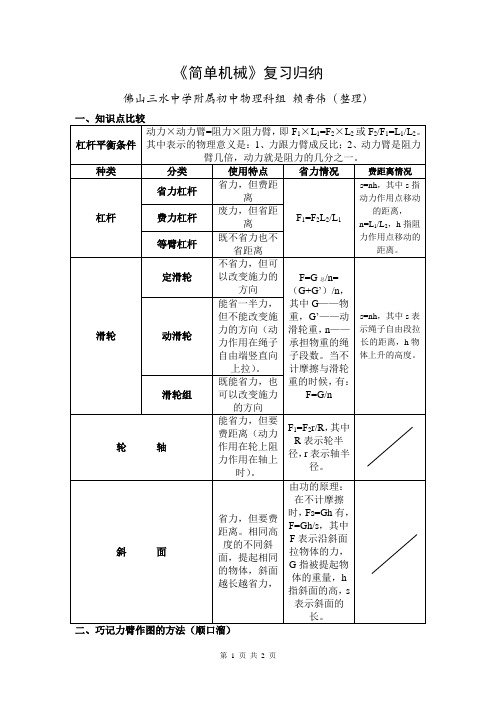
知识点1:杠杆1.概念:一根硬棒,在力的作用下如果能绕着固定点转动,这根硬棒叫杠杆;2.五要素:一点支点、二力动力、阻力、两力臂动力臂、阻力臂;1支点,杠杆绕着转动的点,用“O”表示;2动力是使杠杆转动的力,一般用“F1”表示;3阻力是阻碍杠杆转动的力,一般用“F2”表示;4动力臂即支点到动力作用线的距离,一般用“L1”表示;5阻力臂即支点到阻力作用线的距离,一般用“L2”表示;补充:1动力和阻力的作用点都在杠杆上;2力臂的画法:作用点到力作垂线,用带双箭头的实线表示;知识点2:杠杆平衡1.概念:杠杆在动力和阻力作用下静止不转或匀速转动叫杠杆平衡;4.杠杆平衡的条件:动力×动力臂=阻力×阻力臂;公式表达为:F1L1=F2L2;知识点3:杠杆的分类1.省力杠杆:其特点是L1>L2,F1<F2,省力但费距离;举例:起瓶器、撬棒、铡刀、动滑轮、轮轴、羊角锤、钢丝钳、手推车、花枝剪刀等2.费力杠杆:其特点是L1<L2,F1>F2,费力但省距离;距离:人的前臂、镊子、筷子、火钳、理发剪刀、钓鱼杆、船桨等;3.等臂杠杆:其特点是L1=L2,F1=F2,不省力也不省距离,能改变力的方向;举例:天平、杆秤、案秤等;通俗的讲:省事的大多是费力的,比如吃饭的筷子,火钳等;省气的大多是省力杠杆,比如钢丝钳等;4.判断是省力杠杆或者费力杠杆的方法:1比较力臂长短;2比较力的大小;3比较距离的长短;知识点4:定滑轮常见的简单机械有:杠杆、滑轮、轮轴、斜面等;滑轮是变形的杠杆1.概念:使用时轮轴固定不变的滑轮叫定滑轮;2.实质:等臂杠杆;3.特点:使用定滑轮不能省力但是能改变动力的方向;4.对理想的定滑轮:若不计轮轴间摩擦,则拉力F=G物;绳子自由端移动距离S F或速度v F等于重物移动的距离S G或速度v G知识点5:动滑轮1.概念:使用时滑轮的轴随物体一起运动的滑轮叫动滑轮;可上下移动,也可左右移动2.实质:动力臂为阻力臂2倍的省力杠杆;3.特点:使用动滑轮能省一半的力,但不能改变动力的方向;4.理想的动滑轮:若不计轴间摩擦和动滑轮重力,则拉力F=1/2G物;若只忽略轮轴间的摩擦,则拉力F=1/2G物 + G动;绳子自由端移动距离S F或v F=2倍的重物移动的距离S G或v G知识点6:滑轮组1.概念:定滑轮、动滑轮组合成滑轮组;2.特点:使用滑轮组既能省力又能改变动力的方向;3.理想的滑轮组:若不计轮轴间的摩擦和动滑轮的重力拉力F=1/n G物;只忽略轮轴间的摩擦,则拉力F=1/nG物 + G动;绳子自由端移动距离S F或v F=n倍的重物移动的距离S G或v G;4.组装滑轮组方法:首先根据公式n=G物 + G动/ F求出绳子的股数;然后根据“奇动偶定”的原则,结合题目的具体要求组装滑轮;知识点7:轮轴和斜面其他简单机械1.轮轴:由轮和轴组成,能绕共同轴线轮与轴的叫做轮轴,半径较大者是,半径较小的是;特点:当动力作用在轮上,则轮轴为省力杠杆;动力作用在轴上则轮轴为费力杠杆;举例:门把手、汽车方向盘、扳手等;2.斜面:斜面是一种,可用于克服垂直提升重物之困难;特点:省力但是费距离;距离比和力比都取决于倾角:斜面与平面的倾角越小,斜面较长,则省力越大,但费距离;斜面与平面的倾角越大,斜面较短,则省力越小,但省距离;举例:盘山公路、搬运滚筒、斜面传送带等;补充:在不计算任何阻力时,斜面的为100%,如果很小,则可达到很高的效率;即用F1表示力,s表示斜面长,h表示斜面高,为G;不计无用时,根据功的原理,可得:F1s=Gh;知识点8:有用功、额外功和总功1.有用功:1概念:达到一定目的必须做的对人们有用的功叫做有用功,用W有用表示;2公式:W有用=Gh提升重物=W总-W额=ηW总斜面:W有用=Gh2.额外功:1定义:并非我们需要但又不得不做的功叫做额外功, 用W额表示;2公式:W额=W总-W有用=G动h忽略轮轴摩擦的动滑轮、滑轮组斜面:W额=fL3.总功:1概念:有用功与额外功的和叫做总功;2公式:W总=W有用+W额=FS=W有用/η=P总t斜面:W总=fL+Gh=FL知识点9:机械效率1.概念:有用功跟总功的比值叫做机械效率;2.公式:η= W有用/ W总斜面:η=W有用/W总=Gh/FL G为,h为斜面竖直高度,F为拉力大小,L为斜面长度;定滑轮:η=W有用/W总=Gh/FS= Gh/Fh=G/F动滑轮:η=W有用/W总=Gh/FS= Gh/F2h=G/2F滑轮组:η=W有用/W总=Gh/FS= Gh/Fnh=G/nF3.补充:1机械效率是个无量纲的单位;2有用功总小于总功,所以机械效率总小于1;机械效率通常用百分数表示;举例:某滑轮机械效率为60%,表示有用功占总功的60%;3大量实验表明,使用机械时,人们所做功,都等于不用机械而直接用手所做的功,也就是使用任何机械都不省功;这个结论叫做功的原理;4例题:使用任何机械都不能省功,为什么人们还要使用机械呢答:虽然使用机械不能省功,但使用机械有许多好处:a.使用机械可以改变动力的大小、方向和动力作用点移动的距离;b.使用机械可以改变做功的快慢;c.使用机械还可以比较方便地完成人们不便直接完成的工作.4.提高机械效率的方法:1若有用功不变,可以通过减小,减少机械自重,减少机械的摩擦来增大机械效率;举例:用轻便的塑料桶打水;2若额外功不变,可以通过增大有用功来提高机械效率;举例:在研究滑轮组的机械效率时,我们会发现同一个滑轮组,提起的重物越重,机械效率越高,就是这个道理;3在增大有用功的同时,减小额外功;知识点10:机械效率的测量1.原理:η=W有用/W总=Gh/FS2.应测物理量:钩码重力G、钩码提升的高度h、拉力F、绳的自由端移动的距离S;3.器材:除钩码、铁架台、滑轮、细线外还需刻度尺、弹簧测力计;4.步骤:必须匀速拉动弹簧测力计使钩码升高,目的:保证测力计示数大小不变;5.结论:影响滑轮组机械效率高低的主要因素有:1动滑轮越重,个数越多则额外功相对就多;2提升重物越重,做的有用功相对就越多;3摩擦,若各种摩擦越大做的额外功就越多;4绕线方法和重物提升高度不影响滑轮机械效率;因为重物上升的高度和绳子移动的距离的比值是固定的。
第十二章-简单机械--复习总结提纲
第十二章《简单机械》复习提纲一、杠杆1、定义:在力的作用下绕着固定点转动的硬棒叫杠杆。
说明:①杠杆可直可曲,形状任意。
②有些情况下,可将杠杆实际转一下,来帮助确定支点。
如:鱼杆、铁锹。
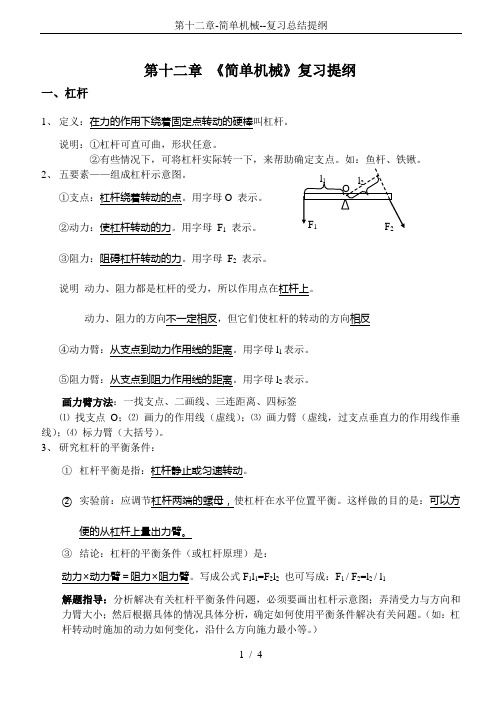
2、五要素——组成杠杆示意图。
①支点:杠杆绕着转动的点。
用字母O 表示。
②动力:使杠杆转动的力。
用字母F1表示。
③阻力:阻碍杠杆转动的力。
用字母F2表示。
说明动力、阻力都是杠杆的受力,所以作用点在杠杆上。
动力、阻力的方向不一定相反,但它们使杠杆的转动的方向相反④动力臂:从支点到动力作用线的距离。
用字母l1表示。
⑤阻力臂:从支点到阻力作用线的距离。
用字母l2表示。
画力臂方法:一找支点、二画线、三连距离、四标签⑴找支点O;⑵画力的作用线(虚线);⑶画力臂(虚线,过支点垂直力的作用线作垂线);⑷标力臂(大括号)。
3、研究杠杆的平衡条件:①杠杆平衡是指:杠杆静止或匀速转动。
②实验前:应调节杠杆两端的螺母,使杠杆在水平位置平衡。
这样做的目的是:可以方便的从杠杆上量出力臂。
③结论:杠杆的平衡条件(或杠杆原理)是:动力×动力臂=阻力×阻力臂。
写成公式F1l1=F2l2也可写成:F1 / F2=l2 / l1解题指导:分析解决有关杠杆平衡条件问题,必须要画出杠杆示意图;弄清受力与方向和力臂大小;然后根据具体的情况具体分析,确定如何使用平衡条件解决有关问题。
(如:杠杆转动时施加的动力如何变化,沿什么方向施力最小等。
)解决杠杆平衡时动力最小问题:此类问题中阻力×阻力臂为一定值,要使动力最小,必须使动力臂最大,要使动力臂最大需要做到①在杠杆上找一点,使这点到支点的距离最远;②动力方向应该是过该点且和该连线垂直的方向。
4说明:应根据实际来选择杠杆,当需要较大的力才能解决问题时,应选择省力杠杆,当为了使用方便,省距离时,应选费力杠杆。
二、滑轮1、 定滑轮:①定义:中间的轴固定不动的滑轮。
②实质:定滑轮的实质是:等臂杠杆③特点:使用定滑轮不能省力但是能改变动力的方向。
新人教版八年级下物理第十二章简单机械期末复习
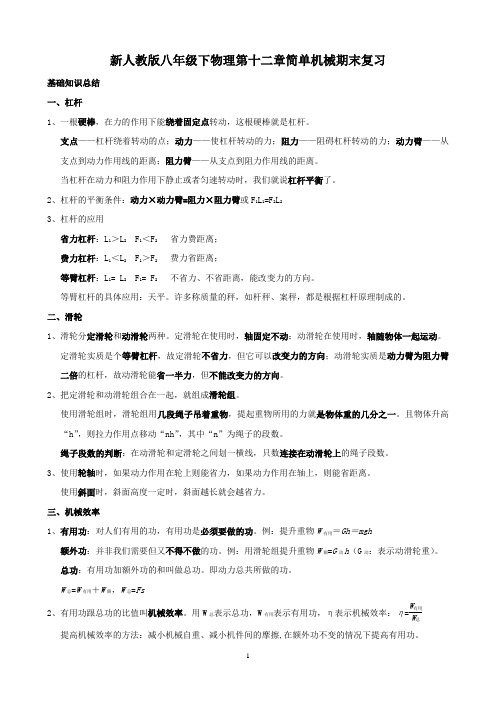
新人教版八年级下物理第十二章简单机械期末复习基础知识总结一、杠杆1、一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就是杠杆。
支点——杠杆绕着转动的点;动力——使杠杆转动的力;阻力——阻碍杠杆转动的力;动力臂——从支点到动力作用线的距离;阻力臂——从支点到阻力作用线的距离。
当杠杆在动力和阻力作用下静止或者匀速转动时,我们就说杠杆平衡了。
2、杠杆的平衡条件:动力×动力臂=阻力×阻力臂或F 1L 1=F 2L 23、杠杆的应用省力杠杆:L 1>L 2 F 1<F 2 省力费距离;费力杠杆:L 1<L 2 F 1>F 2 费力省距离;等臂杠杆:L 1= L 2 F 1= F 2 不省力、不省距离,能改变力的方向。
等臂杠杆的具体应用:天平。
许多称质量的秤,如杆秤、案秤,都是根据杠杆原理制成的。
二、滑轮1、滑轮分定滑轮和动滑轮两种。
定滑轮在使用时,轴固定不动;动滑轮在使用时,轴随物体一起运动。
定滑轮实质是个等臂杠杆,故定滑轮不省力,但它可以改变力的方向;动滑轮实质是动力臂为阻力臂二倍的杠杆,故动滑轮能省一半力,但不能改变力的方向。
2、把定滑轮和动滑轮组合在一起,就组成滑轮组。
使用滑轮组时,滑轮组用几段绳子吊着重物,提起重物所用的力就是物体重的几分之一。
且物体升高“h ”,则拉力作用点移动“nh ”,其中“n ”为绳子的段数。
绳子段数的判断:在动滑轮和定滑轮之间划一横线,只数连接在动滑轮上的绳子段数。
3、使用轮轴时,如果动力作用在轮上则能省力,如果动力作用在轴上,则能省距离。
使用斜面时,斜面高度一定时,斜面越长就会越省力。
三、机械效率1、有用功:对人们有用的功,有用功是必须要做的功。
例:提升重物W 有用=Gh =mgh额外功:并非我们需要但又不得不做的功。
例:用滑轮组提升重物W 额=G 动h (G 动:表示动滑轮重)。
总功:有用功加额外功的和叫做总功。
即动力总共所做的功。
W 总=W 有用+W 额,W 总=Fs2、有用功跟总功的比值叫机械效率。
《简单机械》复习归纳
《简单机械》复习归纳佛山三水中学附属初中物理科组赖香伟(整理)1、找支点,作用线;经过支点作垂线;垂线请你用虚线;直角符号需标记;垂足支点括号系;标出“L”莫忘记。
2、一定点,二画线,点向线,引垂线。
三、关于杠杆平衡的判断——特值法四、关于“最省力”的作图——找出最长的动力臂。
将支点与动力作用点用线连接起来为动力臂,画出该力臂垂直的动力即可。
五、关于承担物重的绳子段数判断:数出与动滑轮...接触共有多少段绳子即可。
六、关于滑轮组的绕线方法——“偶定奇动”:当承重的绳子股数n为偶.数时,绳子的固定端应先拴在定.滑轮上(即“偶定”)再绕线;当承重绳子的股数n为奇.数时,绳子的固定端应先拴在动.滑轮上(即“奇动”)再绕线。
七、一种重要的思维方法——隔离法与整体法。
对于滑轮或滑轮组水平放置使用是大家学习的难点之一。
要解决这方面,我认为思维方法很重要:1、用隔离法分别分析被拉物体的受力情况。
读题时要关注关键词,比如静止、匀速直线运动,这时物体水平方向....受平衡力作用。
2、用整体法分析滑轮受力情况。
(1)对于跟物体有牵连的滑轮,根据“同一根绳子的每段所受拉力均相同”的道理,分析滑轮水平方向....所受的所有力。
(2)求出同一方向所受多个力的合力。
(3)根据“匀速直线运动”或“静止”的条件,可知二力平衡。
(4)根据二力平衡的条件,依次可求相关的某个力。
八、温馨提示:1、自行车上包含不少物理知识,如简单机械(杠杆、轮轴)、增大和减小摩擦、压强等。
而且由于它环保、便利、低碳等优越性,越来越受到市民的推崇,也必将成为中考的热点之一。
请你注意收集和积累相关知识,以备用。
2、简单机械在日常生活中很常见。
要学好这部分知识,请大家平时要多观察多思考,要学以致用,触类旁通。
祝同学们学习进步!。
人教版八年级下册物理第十二章简单机械

第十二章简单机械
第一节杠杆
1、定义:在力的作用下绕着固定点转动的硬棒。
2、五要素——组成杠杆示意图
①支点②动力③阻力④动力臂,从支点到动力作用线的距离;⑤阻力臂,从支点到阻力作用线的距离;
3、杠杆的平衡条件:动力×动力臂=阻力×阻力臂。
写成公式F(1)l(1)=F(2)l(2)
4、省力杠杆:动力臂大于阻力臂省力、费距离,动滑轮、轮轴
费力杠杆:动力臂小于阻力臂费力、省距离,钓鱼杆
等臂杠杆:动力臂等于阻力臂不省力不费力,天平,定滑轮
第二节滑轮
1、定滑轮:定义:中间的轴固定不动的滑轮。
实质:等臂杠杆。
特点:使用定滑轮不能省力但是能改变动力的方向。
理想的定滑轮:(不计轮轴间摩擦)F=G,绳子自由端移动距离= 重物移动的距离
2、动滑轮:定义:和重物一起移动的滑轮。
实质:动力臂为阻力臂2倍的省力杠杆。
特点:使用动滑轮能省一半的力,但不能改变动力的方向。
理想的动滑轮:(不计轴间摩擦和动滑轮重力)F= 1/2G,绳子自由端移动距离=2倍的重物移动的距离
3、滑轮组:定滑轮、动滑轮组合成滑轮组
第三节机械效率
η=W有用/W总。
中考物理总复习系列12简单机械
第十二章《简单机械》知识点1:杠杆五要素和平衡条件1.杠杆的五要素和平衡条件(1)定义:一根在力的作用下能绕着__固定点O __转动的硬棒叫做杠杆(2)杠杆的五要素:支点、动力、阻力、动力臂和阻力臂(3)平衡条件:动力×动力臂=阻力×阻力臂(F 1l 1=F 2l 2)【提示】画力臂:(1)先在杠杆示意图上确定出支点。
(2)画出动力作用线和阻力作用线。
(3)最后从支点向力的作用线引垂线。
2.杠杆的分类:省力杠杆、费力杠杆和等臂杠杆【提示】省力杠杆必然费距离,省距离杠杆必然费力,既省力又省距离的杠杆是不存在的。
知识点2:滑轮【提示】轮轴不一定是省力机械,主要取决于动力作用于轮还是轴。
知识点3:机械效率1.定义:物理学中,将__有用功__跟__总功__的比值叫做机械效率,用η表示 _η=W 有W 总___ 3.1.考查热点:杠杆力劈的作图及其平衡条件的探究,滑轮组的绕制,机械效率的理解及简单计算2.考查题型:以填空题、作图题、计算题、实验题为主3.备考重点:杠杆与滑轮的作图,机械效率的理解及简单计算考点1:杠杆的分类例1 如图所示,所使用杠杆属于费力杠杆的是( A )★突破考点,典例呈现★知识梳理方法点拨:生活生产中,常用工具的杠杆分类:(1)省力杠杆:羊角锤、指甲剪、撬棒、剪刀、扳手、钢丝钳等。
(2)费力杠杆:船桨、钓鱼竿、镊子、筷子、坩埚钳、火钳等。
(3)等臂杠杆:天平、跷跷板、定滑轮等。
例2 图甲是钳子使用时的情景。
图乙是图甲中A部分受力的简化图,F1是钳子受到的动力,B点是阻力的作用点,O是支点,请在图乙中画出动力臂l1和阻力F2。
【答案】方法点拨:(1)力臂表示的是支点O到力的作用线的距离,是从支点O向力的作用线引垂线,不是支点O到力的作用点的距离。
(2)画力臂时可以按照以下步骤:①先在杠杆上确定支点O;②找到动力和阻力的作用点,沿力的方向画出动力作用线和阻力作用线;③最后从支点O向力的作用线引垂线。
假期复习:人教版八年级下册物理知识点+解析例题——第十二章《简单机械》
假期复习八年级下册物理知识点+解析例题——第十二章《简单机械》思维导图【杠杆】(1)定义:一根硬棒,在力的作用下如果能绕着固定点转动,这个硬棒就叫杠杆。
(2)杠杆可以是直的也可以是弯的,但它一定是硬棒,即不能变形的棒。
(3)杠杆的五要素①支点:杠杆绕着转动的点(图中的O点)。
②动力:使杠杆转动的力(图中的F1)。
③阻力:阻碍杠杆转动的力(图中的F2)。
④动力臂:从支点到动力作用线的距离(图中的l1)。
⑤阻力臂:从支点到阻力作用线的距离(图中的l2)。
点拨对杠杆力臂的理解:要弄清动力臂和阻力臂,首先要弄清“力的作用线”的概念。
经过力的作用点,沿着力的方向所引的直线叫力的作用线。
力臂就是从支点到力的作用线的距离。
强调力臂是一个距离,是一个点到一条线的距离,是从支点到力的作用线的距离。
如上图所示,它的起点是杠杆的支点,它的终点是从支点O所作力的作用线的垂线的垂足。
典例如图所示,一根粗细均匀的木棒,在力F的作用下可绕O点转动。
请在图中画出木棒所受重力的示意图及力F对O点的力臂。
解析:均匀木棒,重心在其几何中心,作F的力臂需将力的作用线反向延长。
答案:如图所示。
【杠杆的平衡条件】(1)杠杆平衡的含义在力的作用下,如果杠杆处于静止状态或绕支点匀速转动,我们就认为杠杆平衡了。
(2)杠杆的平衡条件动力×动力臂=阻力×阻力臂,用公式表示为F1l1=F2l2,这个平衡条件也就是阿基米德发现的杠杆原理。
即阻力/动力=动力臂/阻力臂或。
F2/F1=l1/l2(3)利用杠杆平衡条件来分析和计算有关问题,一般遵循以下步骤:①确定杠杆支点的位置。
②分清杠杆受到的动力和阻力,明确其大小和方向,并尽可能地作出力的示意图。
③确定每个力的力臂。
④根据杠杆平衡条件列出关系式并分析求解。
典例如图所示,一轻质杠杆,以O为支点,OA长0.4m,CO长0.3m,CB长0.4m,A端挂的铝块质量为5.4kg,欲使杠杆平衡,在B点应至少施加多大的力?并请画出力的方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第十二章 《简单机械》复习要点一、杠杆1、杠杆的定义:一根在动力的作用下,能绕固定点转动的硬棒。
2、杠杆的七要素:(动力和阻力使杠杆向两个相反的方向转动) 三点:支点O 、动力的作用点A 、阻力的作用点B ; 二力:动力F 1、阻力F 2;二臂:动力臂l 1、阻力臂l 2。
(力臂就是最短的杆长) 3、力臂作图:*先找两力和三点,沿着两力画虚线, 经过支点引垂线,力臂标明要明显。
*@最省力的动力臂作法:--------连接两点做垂线(要求动力最小,动力臂最长)A . 连接支点到动力作用点OA , B.作出动力F 1⊥OA,4、探究杠杆的平衡条件A 、杠杆平衡是指杠杆在动力的作用下,静止或匀速转动。
B 、探究实验猜想:杠杆平衡可能与力和力臂的大小有关。
设计实验:利用等臂的杠杆:——→ 避免杠杆本身的自重对平衡的影响.调节杠杆在水平位置平衡:(力和杠杆垂直 -----便于平衡时测量力臂)——→(杠杆受到的力等于钩码的重力)。
——→(杆长就是力臂)在杠杆两侧挂上不同数量的钩码:——→使数据收集具有普遍性,避免偶然性。
步骤:在杠杆两侧挂上不同数量的钩码,移动钩码的位置,使杠杆在水平位置平衡。
结论:动力×动力臂=阻力× 阻力臂, F 1×l 1=F 2×l 2 变形得: 4、杠杆的分类省力的要费距离,省距离的要费力;其他条件相同时,动力臂越大或阻力臂越小越省力。
A 、三类杠杆:1)省力杠杆:动力臂大于阻力臂。
省力,费了距离。
例:开瓶起子、老虎钳子、铁皮剪子、刹车手柄。
2)费力杠杆:动力臂小于阻力臂。
省距离,费了力。
例:镊子、火钳、钓鱼杆、筷子、用大扫帚扫地 3)等臂杠杆:动力臂等于阻力臂。
不省力也不费力。
例:天平、定滑轮。
B 、杠杆的优点:有的可以省力、有的可以省距离、有的可以改变力的方向、结构合理使用起来比较方便。
二、其它简单机械1、定滑轮------等臂杠杆:不省力,只改变力的方向。
A 、定滑轮的定义:工作时,滑轮的轴不随物体移动的滑轮。
B 、定滑轮的实质:是连续转动的等臂杠杆。
C 、定滑轮特点:能改变力的方向,既不省力,又不费力。
2、动滑轮----动力臂是阻力臂2倍的杠杆,能省一半的力。
A 、动滑轮的定义:工作时,滑轮的轴随物体移动的滑轮。
B 、动滑轮的实质:是连续转动的动力臂是阻力臂2倍的杠杆。
C 、动滑轮特点:能省力一半,不能改变力的方向。
3、滑轮组A 、滑轮组的特点:即可以省力,有可以改变力的方向。
B 、滑轮组的描述:绳子自由端的拉力F → 动力F ,绳子自由端通过的距离s ; 重物的重力G —→ 阻力G ,重物上升的距离h ; 承担物重的绳子段数n ;不记绳子的重力及摩擦,—→必须计算动滑轮的总重G 动。
C 、滑轮组的原理:重物和动滑轮的总重由几段绳子承重,拉力就是总重的几分之一。
竖直方向: ...s=nh ;水平方向: ....s=nl4、轮轴A 、轮轴的定义:可以连续转动的杠杆。
B 、轮轴的特点:既可以省力,又可以改变力的方向。
C 、轮轴的原理:轮半径是轴半径的几倍,轮上的动力就是轴上阻力的几分之一。
F1·R = F2·rD 、常见的省力轮轴:手摇钻,自行车把、脚蹲轮盘、水龙头柄、门把手、套筒扳、大扳手等 5、斜面------其他条件相同时,斜面越长越省力。
A 、斜面的描述:斜面上的拉力F —→ 动力F , 斜面长s ; 重物的重力G —→ 阻力G , 斜面高h ; 斜面上的摩擦力f ,斜面上的倾角;B 、斜面原理:相同的高度,斜面越长越省力。
C 、斜面省力应用:盘山公路、骑自行车上坡走“S ”型路线、螺丝旋进木头。
姓名: 班级: 1221F l F l =1+F G G n=物轮()图14.4-7三、机械效率1、机械效率A、机械效率的定义:有用功跟总功的比值。
有用功:为达到目的必须做的功。
W有=Gh=mgh (克服重力做功)为达到目的必须做的功。
W有= fl (克服水平摩擦力做功)额外功:不需要但不得不做的功。
W外=W总—W有=G动h= fs(斜面)总功:利用机械总共做的功(动力做功)。
W总=Fs=W有+W外B、公式:W有----机械最终对外所做到功。
W总----开始外界对机械所做的功。
C、机械效率的特点:机械效率用百分数表示,总小于1.D、提高机械效率的方法:1)减轻机械的自重:改进机构,结构更合理、轻巧。
2)减小摩擦:经常保养,定时润滑,使机械处于良好的润滑状态。
3)增加提升物体的重力。
(同样的机械,物重越大效率越高)2、测滑轮组的机械效率A、滑轮组机械效率测量原理:竖直方向:'总有用nFGFsGhWWηGGG+====水平方向:nFfWWη总有用==B、实验器材:弹簧测力计、直尺、滑轮2只,绳子一根、钩码3只。
C、测量数据表格(4+3)D、实验注意事项:竖直向上,缓慢匀速向上拉测力计。
E、滑轮组机械效率特点:提示:(1)同一个滑轮组,提起不同的重物,物体越重,机械效率越高。
(2)不同的滑轮组,提起相同的重物,动滑轮越轻(少),机械效率越高。
(3)一般的,机械越简单效率越高,越复杂效率反而越低,《简单机械》训练题1、如图14.1-4,行李车可以作为杠杆吗?请作出杠杆的五要素:2如上图杠杆能平衡吗?为什么?如果两边各去掉一个钩码,杠杆能继续平衡吗?如果不能平衡将向哪边偏?3、钢丝钳(俗称“老虎钳”)是人们日常生活中的一种常用工具,用钢丝钳剪断铁丝时它是杠杆(选填:“省力”、“费力”、“等臂”).4、人体内也存在三种类型的杠杆,即省力杠杆、费力杠杆和等臂杠杆.踮脚时主要靠腓肠肌收缩,骨骼和腓肠肌状况如图14.4-6所示.踮着的脚可以看作是杠杆(填类型).5、图14.4-7所示是一个指甲刀的示意图,它由三杠杆ABC、OBD和OED组成,用指甲刀剪指甲时,下面说法正确的是()A.三个杠杆都是省力杠杆B.三个杠杆都是费力杠杆C.ABC是省力杠杆,OBD、OED是费力杠杆D.ABC是费力杠杆,OED、OED是省力杠杆6、在研究“杠杆的平衡条件”实验中,在处理数据过程中,有同学猜想杠杆的平衡条件可能是“动力+动力臂=阻力+阻力臂”。
经过实验,获得了下述数据:于是,他们认为自己的猜想得到了验证。
你认为他们的实验过程存在什么问题?7、过去农村用的舂米工具是一个杠杆,下图是它的结构示意图。
O为固定转轴,在A端连接着石球,脚踏B端可以使石球升高,抬起脚,石球会落下击打稻谷。
若石球重50N,要将石球抬起,脚至少用多大竖直向下的力?(摩擦和杠杆自重均忽略不计)8、如下图所示,滑轮拉着物体A在桌面上匀速移动,若拉力F=2N,则物体A与桌面间的摩擦力为_______N,若使物体A 前进,则绳子的自由端向右移__ _.9、如右图所示的滑轮组匀速吊起重为600N的物体,绳子重和摩擦力不计,所用的拉力205N,动滑轮的重__________。
动力F1/N 动力臂L1/cm 阻力F 2/N 阻力臂L2/cm4 5 5 4WηW=有总图14.4-4图13.5-1110、如图13.5-4用滑轮组牵引小车沿水平地面匀速前进,图中 滑轮是定滑轮, 滑轮 是动滑轮。
已知小车的重量G=5N ,拉力大小F=3N ,则物体与地面之间摩擦力f= N 。
若小车在拉力作用下前进了0.5m ,则绳子被拉力F 拉过 m 。
11、某同学研究定滑轮的使用特点,他每次都匀速提起钩码,研究过程如图所示,请仔细观察图中的操作和测量结果,然后归纳得出初步结论。
(1) 比较(a )、(b )两图 可知: 。
(2)比较(b )、(c )、(d ) 三图可知: 。
12、使用滑轮组可以 ( )A .省力又省距离B .可以省力,但不能改变力的方向C .既可省力又可改变力的方向D .费了力但可以省距离13、两滑轮组装置如图13.5-6所示,已知每个滑轮重力都为G 0,摩擦和绳重均不计,用它们分别匀速提起重为G=5G 0的物体时,甲、乙两滑轮组的拉力之比是( )A 、6:7B 、7:6C 、5:6D 、15:714、如图13.5-7所示,拉力F=4N,则甲、乙两弹簧测力计的示数分别为( )A. 8N 、8N B . 12N 、8N C .8N 、12N D 、12N 、12N15、如图13.5-9所示,动滑轮重0.5牛,物体重3.5牛,当OA=2OB 时,为使轻质杠杆保持水平平衡、在A 端所加的力应为(不计摩擦) ( )A .4牛B .2牛C .1牛D .0.5牛16、按图中所给的省力条件,画出各滑轮组绳子旁绕方法。
图中G 表示物重,G ′表示动滑轮重,F 表示人对绳子的拉力。
(不计绳重及摩擦)17、 用如图13.5-11所示的滑轮阻,将陷在泥地中的汽车拉出.若拉力F 为900N ,当匀速拉绳前进3m 时,汽车受到泥地的阻力是多大?汽车前进了多少m?(不计机械自身摩擦)18、关于机械效率的说法正确的是( ) A .越省力的机械,其机械效率越高 B .越费力的机械,其机械效率越高 C .做的有用功越多,机械效率越高D .有用功一定时,额外功越少,机械效率越高19、要提高某一机械的效率,可以采取的正确方法是( ) A .增加机械做功的时间 B .减少机械做功的时间 C .有用功一定,减少额外功D .增加重物上升的高度 20、小刚用一个动滑轮把50 kg 的物体提高1 m 所用的力是294 N ,那么他做的总功和有用功分别是 J 和 J ,提升物体的机械效率是 。
21、王强在做“测定斜面的机械效率”的实验,他把测得的数据记录在下面的表格中,并算出了该斜面的机械效率。
斜面长s/m 斜面高h/m物重G/N拉力F/N 有用功/J 总功/J 机械效率 0.50.2521.50.50.5100%在相互交流中,张浩一眼就看出王强测得的机械效率是错的,他告诉王强机械效率不可能为100%。
(1)请你帮王强找找机械效率为100%的原因是____ __,王强测得的实际机械效率应为__ __。
(2)若王强还用这个斜面去拉重为5 N 的木块,该斜面的机械效率将_______。
(选填“变大”“变小”或“不变”)图13.5-6 图13.5-7图13.5-922、测定如图15.2-2所示的滑轮组的机械效率.(1)实验所需器材除钩码、弹簧测力计、滑轮、铁架台外,还需要________和________.(2)如果将两个1 N的钩码匀速提升10 cm,弹簧测力计的示数是0.8 N,将实验数据填入下表:钩码的重力G/N 测力计的示数F/N 钩码上升的高度h/m 测力计移动的距离s/m(3)根据测量数据,求此滑轮组的机械效率,写出计算过程.23、小磊每周一所升的3号国旗(128c m×192cm)的质量为160克,而他升旗时所施加的拉力10牛,他在把国旗升高10米到杆顶的过程中,他所做的总功多少焦耳的功,有用功是多少焦耳?机械效率为多少?应如何提高机械效率?(g=10N/kg)图15.2-24、工人利用如图15.2-3所示的滑轮组提升重物,不计绳重和摩擦.(1)若工人用250N的力恰好能将重400N的物体竖直向上匀速提升,求该滑轮组此时的机械效率?(2)若用此滑轮组将重900N的物体竖直向上匀速提升2m,求拉力F在这一过程中所做的功,此时滑轮组的机械效率是多大?图15.2-3 (3)比较(1)和(2)两次的机械效率,你有什么发现?。