GM5齿轮马达
华威 HW-SM003DUL 空模无刷马达电子调速器说明书

空模无刷马达电子调速器(ESC )说明书 HW-SM003DUL-20130709page 1鸣叫提示音符“ 123”,表感谢您购买本产品!无刷动力系统功率强大,错误的使用可能造成人身伤害和设备损坏。
为此我们强烈建议您在使用设备前仔细阅读本说明书,并严格遵守规定的操作程序。
我们不承担因使用本产品或擅自对产品进行改造所引起的任何责任,包括但不限于对附带损失或间接损失的赔偿责任。
产品特色1. 所有器件均为原装正品,确保电调具有一流品质和极高的可靠性。
2. 具有强大的耐流能力。
3. 具备输入电压异常保护、电池低压保护、过热保护、油门信号丢失保护等多重保护功能。
4. 具有普通启动、柔和启动、超柔和启动三种启动模式,兼容固定翼飞机及直升机。
5. 可设定油门行程,兼容各种遥控器。
具备平滑、细腻的调速手感,一流的调速线性。
6. 最高转速可以达210000 RPM (2极马达)、70000 RPM (6极马达)、35000 RPM (12极马达)。
产品功能简要说明(黑体字为出厂默认值) 1. 刹车设定:无刹车/有刹车。
2. 电池类型:Lipo (锂电池)/ NiMH (镍氢)。
3. 电池低压保护模式:逐渐降低功率/立即关闭输出。
注:低压保护时,将油门摇杆拉到最小油门的位置后即可重新启动马达,但因为此时仍处于低压状况,所以功率输出较小。
4.低压保护阈值:低/中/高。
1) 当电池类型设定为Lipo 电池时,电调自动判断锂电节数,低/中/高情况下每节电池的截止电压分别为:2.85V/3.15V/3.3V 。
例如使用3节锂电,设定为中截止电压,则低压保护阈值为:3.15*3=9.45V 。
2) 当电池类型设定为镍氢电池时,低/中/高情况下截止电压为开机时输入电压的0%/50%/65%。
0%意味着不进行低压保护。
例如:使用6节镍氢电池,充满时电压为 1.44*6=8.64V ,当设定为中截止电压时,则截止电压阈值为:8.64*50%=4.3V 。
WH-GM5 硬件设计手册说明书
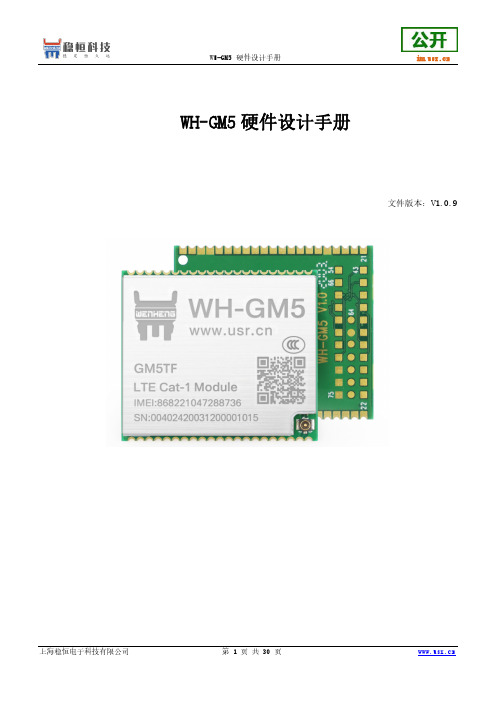
WH-GM5硬件设计手册文件版本:V1.0.9目录1.关于文档 (3)1.1.文档目的 (3)1.2.安全警告 (3)1.3.产品外观 (4)1.4.参考文档列表 (4)2.产品简介 (5)2.1.基本参数 (5)2.2.模块应用框图 (6)2.3.引脚定义 (7)2.4.开发套件 (12)3.硬件参考设计 (13)3.1.外围电路框架参考 (13)3.2.电源接口 (13)3.2.1.主电源输入:VBAT (13)3.2.2.参考电平输出:V_PAD_3V0,V_PAD_1V8 (15)B接口 (15)3.4.UART接口 (16)3.5.SIM接口 (17)3.6.工作状态指示 (18)3.7.RESET引脚 (20)3.8.RELOAD引脚 (21)3.9.PWRKEY引脚 (21)3.10.RF接口 (21)4.电气特性 (23)4.1.工作存储温度 (23)4.2.输入电源 (23)4.3.模块IO口电平 (23)4.4.IO驱动电流 (24)4.5.ESD防护等级 (24)5.机械特性 (25)5.1.回流焊建议 (25)5.2.外形尺寸 (25)6.联系方式 (28)7.免责声明 (29)8.更新历史 (30)1.关于文档1.1.文档目的本文档描述了WH-GM5/WH-GM5TF模块的硬件应用接口,包括相关应用场合的电路连接以及射频接口等。
WH-GM5是2G+Cat1模块,WH-GM5TF是单Cat1模块,增加了内置WiFi/蓝牙功能。
本文档将详细介绍WH-GM5模块的所有功能。
本文档可以帮助用户快速的了解WH-GM5/WH-GM5TF模块的接口定义、电气性能和结构尺寸的详细信息。
结合本文档和其他的WH-GM5/GM5TF模块的应用文档,用户可以快速的使用GM5来设计移动通讯应用方案。
1.2.安全警告在使用或者维修任何包含GM5模块的终端或者手机的过程中要留心以下的安全防范。
终端设备上应当告知用户以下的安全信息,否则上海稳恒将不承担任何因用户没有按这些警告操作而产生的后果。
金笛MG35 4频段工业级GSM GPRS MODEM商品说明书

公司介绍产品零缺陷,售后零服务。
不需要服务的产品才是更好的产品。
缺图01金笛是一家集硬件、软件研发、生产、销售一体的高科技企业,注册资金2000万元,产品行销海内外,业内享有极高的美誉度。
MU-106M1806-NC5M1806-ME MG301-FT MC323RS232MC323MG301M1206B-FTMG35-FT M1806-NC5M1806-ME M1806N-NC5MG35-N M1806N-ME MG301-N小一体机MN1604大一体机MN1408RJ45M1206BMG35产品概述03把方便留给客户,把麻烦留给我们。
能简单才不简单。
提供高可靠的短信软硬件,立志把可靠性做到极致。
产品经过十多年的技术积累和积淀,不断迭代升级,日趋完善。
产品选型图02金笛MG35是一款全球4频段工业级GSM/GPRS MODEM,是一款2G短信猫。
金笛MG35 GSM/GPRS Modem其工作频段是GSM850MHz,EGSM900MHz,DCS1800MHz,PCS1900MHz。
提供GSM短信,GPRS数传业务,可在全球大多数国家使用。
该产品采用射频基带一体化超小超薄核心芯片方案,具有超低功耗、超宽温度、更快的速度传输率,抗干扰能力强。
经过雷击、浪涌、电脉冲、温度冲击、跌落、盐雾等大量可靠性测试,可靠性达到99.99%,是短信监控、报警、通知和M2M应用的理想方案。
超小超薄核心芯片金笛MG35核心模块采用强劲的ESD保护,直接放电空气±10KV,接触±5KV,充分的FLASH保护机制和多重防呆机制,保证设备可以长期稳定运行。
强劲ESD保护金笛MG35网络兼容性强,发送速度快,另有基站定位、空中升级固件等专利技术,价格却比较亲民,有着超高性价比。
超高性价比串口款USB口款做高性能的短信猫金笛GSM MODEM MG35典雅、端庄,如同一件精致的艺术品,七分圆润三分刚硬每一个细节的品性、品质,都经过严格测试与检测,把可靠性做到极致外壳采用铝合金材质,防刮防指纹,坚固耐用磨砂工艺,高端时尚,质感十足USB款MG35产品配件您可能有这样的经历,插机箱前的USB不识别,插机箱后的USB就正常。
和利时电机SYNTRON森创产品说明书

版权申明SYNTRON森创®是北京和利时电机公司(以下简称和利时电机)于2005年推出的产品品牌。
这个品牌浓缩了公司的核心技术和影响力,是公司始终注重自主创新,保持技术优势的体现。
说明书的内容参照了相关法律基准和行业基准。
如对本说明书提供的内容有疑问,请向销售人员咨询,致电客服热线,联系官网客服或致信本公司。
和利时电机保留在不事先通知的情况下,修改本手册中的产品和产品规格参数等权力。
手册请联系销售人员,或在和利时电机的官方网站下载相关手册。
和利时电机具有本产品及其软件的专利权、版权和其它知识产权。
未经授权,不得直接或者间接地复制、制造、加工、使用本产品及其相关部分。
和利时电机具有本使用说明书的著作权,未经许可,不得修改、复制使用说明书的全部或部分内容。
安全有关的符号说明本说明书中与安全有关的内容,使用了下述符号。
标注了安全符号的都为重要内容,请安全注意事项安全注意事项目录 第一章产品概况 ................................................... - 1 -1.1产品概况 ................................................................................................................................ - 1 -1.1.1简介 ........................................................................................................................... - 1 -1.1.2低压伺服驱动器型号命名 ....................................................................................... - 3 -1.1.3低压伺服一体机型号命名 ....................................................................................... - 3 -1.1.4规格和性能 ............................................................................................................... - 4 -1.1.5电机配套 ................................................................................................................... - 4 -1.1.6产品构造 ................................................................................................................... - 5 -1.1.7安装尺寸 ................................................................................................................... - 5 - 第二章准备 ...................................................... - 12 -2.1通讯协议及软件 .................................................................................................................. - 12 -2.2操作面板 .............................................................................................................................. - 13 -2.2.1操作面板介绍 .........................................................................................................- 13 -2.2.2指示灯介绍 .............................................................................................................- 13 -2.2.3数码管 .....................................................................................................................- 13 -2.2.4按键 .........................................................................................................................- 14 -2.2.5键盘操作流程 .........................................................................................................- 15 - 第三章配线 ...................................................... - 16 -3.1接线总图 .............................................................................................................................. - 16 -3.2接线定义 .............................................................................................................................. - 17 -3.2.1 LS-10520M2系列接线定义 ..................................................................................- 17 -3.2.2 LS-10530BA系列接线定义 ..................................................................................- 18 -3.2.3 LS-10530BK系列接线定义 ..................................................................................- 19 -3.2.4 LS-10530D5系列接线定义...................................................................................- 20 -3.2.5 LS-10540D/LS-10550D系列接线定义................................................................- 21 -3.2.6 LS-20530DG系列接线定义..................................................................................- 22 -3.2.7 LS-20520E系列接线定义 .....................................................................................- 23 -3.2.8 LS-20530E / LS-20535E系列接线定义..............................................................- 25 -3.2.9 LS-20540E系列接线定义 .....................................................................................- 27 -3.2.10 DM一体机系列接线(驱动器后置一体机).....................................................- 29 -3.2.11 SM一体机系列接线(驱动器侧背一体机) .....................................................- 29 -3.2.11.1类型1 ....................................................................................................................- 29 -3.2.11.2类型2 ....................................................................................................................- 32 -3.3其他接线说明 ...................................................................................................................... - 33 -3.3.1 地线连接..................................................................................................................- 33 -目录3.3.2 编码器差分输出接线 ..............................................................................................- 33 -3.3.3 数字输入接线 ..........................................................................................................- 33 -3.3.4 数字输出接线 ..........................................................................................................- 33 -3.3.5 手动控制制动器接线 ..............................................................................................- 34 -3.3.6 位置模式接线 ..........................................................................................................- 34 -3.3.7 内部速度模式接线 ..................................................................................................- 35 -3.3.8 外部速度/转矩模式接线图 .....................................................................................- 35 - 第四章设定 ...................................................... - 36 -4.1电机方向 .............................................................................................................................. - 36 -4.2状态参数 .............................................................................................................................. - 36 -4.3功能参数 .............................................................................................................................. - 37 -4.3.1工作控制模式 .........................................................................................................- 37 -4.3.2系统基本参数控制 .................................................................................................- 37 -4.3.3数字输入端口 .........................................................................................................- 38 -4.3.4内部控制信号 .........................................................................................................- 38 -4.3.5数字输出端口 .........................................................................................................- 41 -4.3.6脉冲端口输入输出 .................................................................................................- 41 -4.3.7目标到达状态判断 .................................................................................................- 42 -4.3.8位置环控制参数 .....................................................................................................- 43 -4.3.9模拟量输入参数 .....................................................................................................- 44 -4.3.10内部速度参数 .........................................................................................................- 45 -4.3.11速度环调节参数 .....................................................................................................- 45 -4.3.12转矩电流指令滤波参数 .........................................................................................- 45 -4.3.13控制限制参数 .........................................................................................................- 46 -4.3.14增益切换 .................................................................................................................- 47 -4.3.15速度模式加减速时间 .............................................................................................- 48 -4.3.16电磁制动器 .............................................................................................................- 48 -4.3.17报警保护配置 .........................................................................................................- 48 -4.3.18通讯参数设置 .........................................................................................................- 50 -4.3.19电流环控制参数 .....................................................................................................- 51 -4.3.20泄放参数配置 .........................................................................................................- 51 -4.3.21历史报警码 .............................................................................................................- 52 -4.4试运行 .................................................................................................................................. - 52 -4.4.1基本流程 .................................................................................................................- 52 -4.4.2JOG模式空载试运行(键盘面板上操作) ........................................................- 54 -4.4.3速度模式空载试运行(总线通讯操作) .............................................................- 54 -目录 第五章调整 ...................................................... - 55 -5.1控制模式的选择 .................................................................................................................. - 55 -5.2输入输出的配置 .................................................................................................................. - 56 -5.2.1输入信号端口分配 .................................................................................................- 56 -5.2.2输出信号端口分配 .................................................................................................- 57 -5.3基本参数 .............................................................................................................................. - 58 -5.3.1伺服使能 .................................................................................................................- 58 -5.3.2急停 .........................................................................................................................- 58 -5.3.3指令取反 .................................................................................................................- 58 -5.3.4零速到达 .................................................................................................................- 59 -5.3.5目标速度到达 .........................................................................................................- 59 -5.3.6速度一致 .................................................................................................................- 59 -5.3.7目标转矩到达 .........................................................................................................- 59 -5.3.8超程 .........................................................................................................................- 60 -5.3.9恢复出厂默认参数 .................................................................................................- 60 -5.4位置模式调整 ...................................................................................................................... - 61 -5.4.1脉冲指令方式的选择 .............................................................................................- 61 -5.4.2脉冲指令窗口滤波器 .............................................................................................- 61 -5.4.3脉冲指令平滑滤波器 .............................................................................................- 62 -5.4.4指令脉冲禁止功能 .................................................................................................- 62 -5.4.5电子齿轮的设定 .....................................................................................................- 62 -5.4.6位置到达信号 .........................................................................................................- 65 -5.4.7位置接近信号 .........................................................................................................- 65 -5.4.8位置超差警告 .........................................................................................................- 66 -5.4.9位置脉冲误差清零 .................................................................................................- 66 -5.5速度模式调整 ...................................................................................................................... - 66 -5.5.1外部模拟量速度模式运行 .....................................................................................- 66 -5.5.2内部速度模式运行 .................................................................................................- 67 -5.5.3加减速时间 .............................................................................................................- 68 -5.5.4零速给定 .................................................................................................................- 69 -5.6转矩模式调整 ...................................................................................................................... - 69 -5.6.1转矩指令增益的调整 .............................................................................................- 69 -5.6.2转矩指令偏移量的调整 .........................................................................................- 69 -5.6.3转矩指令方向的设置 .............................................................................................- 69 -5.6.4转矩指令低通滤波器 .............................................................................................- 69 -5.6.5模拟转矩指令零值箝位 .........................................................................................- 70 -目录5.6.6转矩控制时的速度限制 .........................................................................................- 70 -5.7共振抑制 .............................................................................................................................. - 71 -5.8转矩限制 .............................................................................................................................. - 72 -5.9增益切换 .............................................................................................................................. - 73 -5.10增益调整 .............................................................................................................................. - 75 -5.10.1速度环增益调整 .....................................................................................................- 75 -5.10.2位置环增益调整 .....................................................................................................- 75 -5.10.3增益调整注意事项 .................................................................................................- 75 -5.11电磁制动 .............................................................................................................................. - 76 -5.12编码器的输出 ...................................................................................................................... - 77 -5.13干扰对策 .............................................................................................................................. - 77 -第六章通讯 ...................................................... - 79 -6.1Modbus总线设置 ................................................................................................................ - 79 -6.2CAN总线设置..................................................................................................................... - 79 -6.3通讯协议 .............................................................................................................................. - 79 -第七章故障警告及处理 ............................................ - 80 -7.1报警代码 .............................................................................................................................. - 80 -7.2报警状态指示灯 .................................................................................................................. - 83 -7.3性能异常及解决办法 .......................................................................................................... - 83 -第八章维护与保养 ................................................ - 84 -8.1伺服电机的检查 .................................................................................................................. - 84 -8.2伺服驱动器的检查 .............................................................................................................. - 84 -产品概况第一章产品概况1.1 产品概况1.1.1 简介LS系列低压伺服驱动器(以下简称LS驱动器),是和利时电机根据市场需求推出的新一代高性能、高可靠产品。
M4000系列直流电机控制器FXM5 字段控制器安装和操作手册说明书
CONTENTS1INTRODUCTION (2)2SPECIFICATION (5)3INSTALLATION-MECHANICAL (6)4INSTALLATION-ELECTRICAL (7)Power Connections (7)Control Connections (7)Field Current Selection (9)Armature Voltage Feedback Range (12)Configuration (12)Automatic Field Weakening (Constant Power) (12)Constant Field Current (13)Field Current Controlled by External Reference (13)Field Economy (14)Adjustments (14)Armature Voltage Feedback Range (14)Maximum Armature Voltage (14)Maximum Field Current (14)Minimum Field Current (14)5DIAGNOSTICS (15)ILLUSTRATIONSFIGURE1Half-wave rectified voltage and current (3)2Full-wave rectified voltage and current (3)3Overall and fixing dimensions (6)4Location of principal components (8)5External indications and access (8)6System schematic diagram (11)7Connections for automatic field weakening (12)8Connections for constant field current (13)9 Connections for control by external reference (13)10 Ribbon cable connection between Mentor II drive and FXM-5 field controller (16)1INTRODUCTIONThe controller FXM5 is designed to control the field of DC motors up to 20 amps field current. The FXM5 is a single-phase, controlled-thyristor rectifier with a control logic PCB. The controlled rectifier can be configured by a selector jumper link to operate as a half-controlled or a full-controlled system.The FXM5 may be set for different field-control modes, including automatic field weakening (constant horsepower) or constant field current, or the field can be independently controlled by an external reference. A field economy control is provided, for external switching. A field current indicator is installed on the control PCB. Drive protection is provided by a built-in-field failure relay.The FXM5 can be used as a stand-alone unit or in conjunction with the MENTOR II DC motor variable speed drive. When used with the MENTOR II, the FXM5 is controlled by the drive, which can use various software options providing highly precise control.THYRISTOR-CONTROLLED RECTIFIERThe converter consists of two SCR modules, each consisting of a pair of series-connected SCR's. The SCR modules are interconnected to form a single phase symmetrical bridge. The power circuit contains RC snubbers and transient-voltage suppressors.Half-controlled and Full-controlledThe differences in output are illustrated in Figs. 1 and 2. In half-controlled mode, only the positive half-cycle of the AC supply voltage is able to pass. If the SCR's were fired for the full 180 degree of the half-cycle, the mean value of the output voltage would be 0.318 of the AC voltage peak amplitude. An output voltage is present, in fact, only when the SCR's are fired, so the output is controllable from zero. Fig 1 illustrates the condition when firing occurs approximately 120 degree before the voltage zero at the end of the half-cycle (this is termed '120 degree advanced').In full-controlled mode, both pairs of SCR's are in operation, fired alternately at 180 degree displacement. The maximum mean output voltage is 0.637 of the peak AC supply voltage. Fig 2 illustrates the condition when firing occurs approximately 120 degree before the voltage zero at the end of the half-cycle.It is recommended that the field controller be used in the half-controlled mode rather than full-controlled, unless the application is one that demands that the field be capable of very rapid weakening (suppression), or if the time-constant of the motor is unusually long. In general, less current ripple is produced by a half-controlled output, and therefore torque ripple is less.Figure 1Figure 2Control SystemRefer to Fig.7 page 11. The control system consists of the following parts -Voltage amplifier,Field current amplifier,SCR firing circuit.The voltage amplifier senses the armature voltage and compares it with a fixed positive reference provided through a non-variable resistor. The reference is adjustable by potentiometer RV1. If the armature voltage is below the maximum value (when motor speed is below base speed), the voltage amplifier is at maximum negative causing the field current to be maximum. This condition is indicated by LED1. When LED1 is illuminated, the field current can be adjusted by potentiometer RV2.When armature voltage reaches maximum, the output of the voltage amplifier begins to fall, weakening the field. The speed may increase further, but the armature current is progressively reduced to maintain constant-power output.The field current is prevented from falling below a minimum value by the positive-going swing of the voltage amplifier being limited to a negative voltage. LED2 indicates that the field is at minimum. The value of the minimum field is adjusted by potentiometer RV2.Variable field current is provided by the timing of the firing circuits of the SCR's, which is varied according to the armature voltage feedback and the adjustable potentiometer settings.Monitoring and ProtectionA field current monitor visible from the front of the module indicates by LEDs the field current as a ratio of the maximum field current setting (0.1 to 1.0, in steps of 0.2).Internal field-failure relay changeover contacts operate when the field current falls below 0.1 of the set maximum field current. The relay can be externally connected to disconnect the motor to prevent a runaway condition.SPECIFICATIONSupply VoltageAny 50/60Hz AC voltage up to 480V.Field Voltage200V min. to 430V max., depending on supply voltage.Control VoltageSingle phase AC 50HZ - 380V/440V+10%, and 220V/254V+10%60Hz - 460V/480V+10%Armature Voltage Feedback220V to 600V DC. Must be protected by external fuses, max. rating 2A. Field CurrentUP to 20A, depending on configuration of output, half, or full-controlled. Operating Temperature Range0 degree C to 50 degree CStorage Temperature Range-40 C Degree to +70 Degree CHumidity85% maximum, non-condensing.SCR BridgeSingle phase input, asymmetrical 2-SCR half-controlled output.Single phase input, symmetrical 4 SCR full-controlled output.Field Failure RelayVoltage250V AC, 50V DCCurrent 3.5A max.Switching1000VA max., 200W max.INSTALLATIONMECHANICALThe FXM5 module must be firmly attached to a vertical surface by the two fixing brackets, Fig.3. The module must be located so that the fins of the heat sink are vertically aligned to permit free circulation of cooling air. Access for cooling air to and from the heat sink must not be obstructed. As supplied, the FXM5 has an integral cover, retained by four screws.Figure 3INSTALLATIONELECTRICALSafety WarningVoltage present in the FXM5 can inflict injury and may be lethal. Personsresponsible for installing and operating this equipment must be aware of thedanger and take due precautions. It is recommended that the equipmentSHOULD BE SAFELY ISOLATED before the cover is removed.POWER CONNECTIONSFor voltages refer to Section 2 . A single phase AC power supply is connected to terminals L1 and L3.Use with MENTOR IIWhen the FXM5 is to be operated by a MENTOR II DC drive, it is essential that terminals L1 and L3 are connected to the same phase as terminals L1 and L3 of the MENTOR II.CONTROL CONNECTIONSControl Voltage RangeThe FXM5 module must be adjusted to accept one of two 50/60Hz supply voltage ranges - either 220V to 254V +10%, or 380V to 440V +10% (up to 480V + 10% at 60Hz). The control supply must be in phase with the power supply to the SCR's.The FXM5 PCB is adjusted for the available supply voltage range by means of TWO jumper links. These are located to the right of the transformer in the middle of the PCB, Fig.4.A low voltage (<220V) field supply cannot be used for control supply. In this case, a separate control supply within the correct voltage range must be provided. REMOVE fuses FS1 and FS2, and connect the control supply to terminals E1 and E3 on the PCB, Fig.4.IMPORTANTEnsure that BOTH voltage range selector jumpers are correctly set.Figure 4Figure 5FIELD CURRENT SELECTIONStand alone operation:The maximum field current delivered by the FXM5 is determined by the number of primary turns of the DCCT supplied with the module, and by the setting of jumper LK1.Jumper LK1 can be placed in one of two positions, such thatMaximum I f = 20 or 15Np Npwhere Np is the number of DCCT primary turnsThe resulting max. field current can thus be adjusted to one of 20 different values as listed in the table belowDCCT Turns Max I f with 20/Np Max I f with 15/Np10 2.0 1.59 2.2 1.78 2.5 1.97 2.9 2.16 3.3 2.55 4.0 3.04 5.0 3.63 6.7 5.02*10.07.51*20.0*15.0*When field current is greater than 9 Amps, the AC supply fuse FS3 & FS4 must be replaced with 20 Amp fuses (KTK-20), and the 20 gauge primary turns wire for the DCCT must be replaced with 14 gauge wire.When an FXM5 is used while linked to the Mentor II with the ribbon cable, parameter 06.11, DCCT turns and LK1 jumper position should be adjusted per the following table:Maximum current(A)Primary turnsNpLK1 jumper position Parameter 06.1120/Np15/Np110X1210X235X345X454X563X672X782X892X910*2X1011*1X1112*1X1213*1X1314*1X1415*1X1516*1X1617*1X1718*1X1819*1X1920*1X20*When field current is greater than 9 Amps, the AC supply fuse FS3 & FS4 must be replaced with 20 Amp fuses (KTK-20), and the 20 gauge primary turns wire for the DCCT must be replaced with 14 gauge wire.Figure 6Protective FusesNote that the field output circuit is protected by 10A fuses as standard (FS3 and FS4, Fig.4). If a field current in excess of 9A is required the fuses must be replaced by HRC fuses of appropriate rating.ARMATURE VOLTAGE FEEDBACK RANGERefer to Fig.4 page 7 and Fig. 7 page 11.Provision is made to accept voltage feedback over a wide range. If the voltage is above 470V additional resistance must be inserted in the circuit. Adjustment is made by jumper LK2. CONFIGURATIONAutomatic Field Weakening (Constant Power) Refer to Fig.8.In this configuration, the armature voltage Va is increased to a maximum with a fixed field current I f to provide constant torque up to base speed. Further increase of speed results in the field being weakened, providing constant power output.For a DC motor:Power(W) = Armature Voltage x Armature CurrentSpeed(n) = Constant x Armature VoltageField CurrentFigure 7Constant Field Current Refer to Fig. 8.In this configuration, field current is stabilized to be independent of variations in both supply voltage and ambient temperature.Figure 8Figure 9Control by external reference Refer to Fig. 9.Applications for this mode include load-sharing and coiler/uncoiler operation. The field current is controlled by a OV to - 10V reference applied to TB1-3.Field EconomyRefer to Fig. 7 page 11.Under normal operating conditions, terminals TB1-1 and TB-2 are connected as shown in Figs. 7, 8 and 9. By breaking this connection, the field current is set to its minimum value. This may be necessary to prevent overheating of non-ventilated motors when stationary, and may be used to maintain a small current in the windings of motors installed in humid environments to prevent condensation.ADJUSTMENTSRefer to Fig. 4 page 7 and Fig. 7 page 11.Armature Voltage FeedbackAdjust jumper link LK2 according to whether the feedback voltage exceeds 470V or otherwise. Maximum Armature VoltageTo set potentiometer RV1. When the drive is to operate in field-weakening mode (constant power above base speed) RV1 sets the armature voltage, and hence the speed, above which the field begins to weaken. The potentiometer is set with the motor running, as follows-Turn RV1 fully clockwiseRun the drive up to full speedAdjust RV1 so that the armature voltage corresponds to the maximum rated value. Maximum Field CurrentTo set potentiometer RV2. The MAX I f monitor corresponds to fully-clockwise rotation of the potentiometer. Should a lower maximum If be required, turn RV2 counter-clockwise.Minimum Field CurrentTo set potentiometer RV3. This control should be adjusted only when LED2 (MIN I f) is illuminated. To achieve this, press switch SW1 and hold whilst adjusting RV3.Minimum field current can be adjusted within the range 0.1 to 0.9 times maximum I f, as indicated by the monitor. Minimum field current should be set just below the actual minimum working field current of the motor. If adjusted to less that 0.1 X I f, the field failure relay will de-energize.5DIAGNOSTICSFAULT POSSIBLE CAUSE ACTIONMain contactor does not close.Field failure relayRL1 is de-energized.Check fuses FS1,23 and 4.Field current monitor Check field connections.Check that RV3 is not turnedfully counter-clockwise.Motor will not run up to maximum speed.Max armature voltagefeedback.Adjust max armature voltageRV1.Field current monitor stays at maximum.Max armature voltagefeedback.Check fuses insupply to terminalsA1 and A2.Drive lacks torque and/or field failure relay RL1 trips at high speed.Maximum armaturevoltage set too low.Adjust max. armaturevoltage RV1.Overload trip when motor is normally-loaded.Max. field currentset too low.Adjust max. fieldcurrent RV2.Field failure relay trips when motor is under rapid acceleration.Max. field currentset too low.Adjust min. fieldcurrent RV3.Figure 10 Ribbon cable connection between Mentor II drive and FXM-5 field controller.。
航空航天、环境控制、机电、过滤、流体与气体处理、液压、气动、过程控制、密封与屏蔽系列产品说明书

航空航天环境控制机电过滤流体与气体处理液压气动过程控制密封与屏蔽ENGINEERING YOURSUCCESS行走机械应用 液压泵与液压阀技术资料 换算 系数1 kg 2.20 lb1 N 0.225 lbf1 Nm 0.738 lbf ft1 bar 14.5 psi1 l 0.264 US gallon1 cm3 0.061 cu in1 mm 0.039 in9/5°C + 32 1°F派克公司保留改进产品的权力,恕不预先告之。
尽管样本不断地校对和修改,也有出错的可能性,有关产品的更进一步详细资料请与派克公司及时取得联系目目齿齿齿 / 齿齿齿齿PGP/M511 系系齿齿齿/齿齿P20 系系齿齿齿/齿齿PGP/M517 系系齿齿齿/齿齿P51 系系齿齿齿P76 系系齿齿齿/齿齿C101/102 系系齿齿齿1 42 1852 49 44技技技技PGP/M620 系系齿齿齿/齿齿29CBT-E3 系系齿齿齿CBT-F31 系系齿齿齿7357G5/GM5 系系齿齿齿/齿齿83 GPC4/GMC4 系系齿齿齿/齿齿93 CBT-E3***HL****** 系系系系齿66 GPC4-G5 系系系系齿齿齿103产品资料PGP/PGM 511/517 系列PGP 50022高性能高效率高工作压力优点高强度材料和大直径DU轴承,使轴承负载小,用于高压工作。
噪声低效率高在所有工况条件下,压力平衡的浮动轴套装置保证最高的效率。
应用的灵活性安装和连接尺寸国际化,能够集成各种阀组和公用进口的多联泵配置,提供在设计和应用方面无法比拟的灵活工作粘度范围:8~1000 mm /s,最高的允许工作压力取决于粘度,工作压力p ≤10 bar 和转速n ≤1500 rpm 的冷起动时,粘度范围:1000~2000 mm /s-40 C ~ +70 C按照ISO 4406 Cl. 16/13见表顺时针,逆时针或双向注意! 驱动泵只能按照所示的旋转方向。
意大利SAI内五星液压马达GM2
Tapered 2 Conico
Le dimensioni della flangiatura e degli alberi sono come nelle serie M3 e P3.
Cylindrical 8 Cilindrico
ALBERI
Internal spline DIN 5480 9 Calett. intern. UNI 220 3
SPLINE DATA - CALETTATURE
40-3-12 DIN 5480
d0 Ø36.0
d1
Ø40.0
+0.620 +0
H14Βιβλιοθήκη d2Ø34.0+0.160 +0
H11
A Ø5.25
da Ø28.964 H11
d3 Ø39.4
-0 -0.160
h11
d4 Ø33.4
-0 -0.620
h14
B Ø6.0
I grafici si riferiscono alle caratteristiche del motore 300 cc operando con olio minerale avente viscosità 40 cSt a 50 °C.
LEAKAGE RATE DRENAGGIO (cc/min)
db Ø45.989 f8
15
36 UNI 220 (DIN 5462)
d1
Ø36.0
+0.025 +0
H7
d2
Ø40.0
+0.160 +0
H11
A
7.0
+0.028 +0.013
F7
魅玛轻型迷你PTZ控制器RM-LP5用户手册说明书
Mini PTZ Controller RM-LP5User ManualParameters & Specs Communication & Control Interface Camera Control or Operation Control Signal FormatPower Supply and ConsumptionPhysical & Others Description of Button & Knob FunctionInterface Function and Connection Diagram Upgrade Interface RS422/RS485 Interface RS232 Interface LAN Interface12V DC Power InterfaceSystem Menu Operation Instructions System Menu Function Explanation Keyboard System Menu System Setting Comm Setting Ethernet SettingPassword SettingSystem Menu Guide Products DimensionsContent2 2 2 2223 7 7788910 10 10 10 11 11 12 12 13④⑤⑪⑮①This Rotation Knob which was to adjustment the Camera Exposure Parameter or Red Gain Value, Turn Right Rotation was to changed the valued Increased, Turn Left Rotation was changed the Valued Decreased.②This Rotation Knob which was to adjustment the Camera Exposure Parameter or Blue Gain Value, Turn Right Rotation was to changed the valued Increased, Turn Left Rotation was changed the Valued Decreased.③This Rotation Knob which was to adjustment the Camera Exposure Parameter, Turn Right Rotation was to changed the valued Increased, Turn Left Rotation was changed the Valued Decreased.④LED Display, Real-time display of items and parameter values of adjusted by " knob ①".⑤LED Display, Real-time display of items and parameter values of adjusted by " knob ②".⑥LED Display, Real-time display of items and parameter values of adjusted by " knob ③".⑦Zoom Bridge KeyIt is used to control the camera to Zoom In/Out, for example, press the TELE end of the bridge key, the camera will Zoom in the TELE direction object, When you Press with more Large Pressure, then the Zoom Speed changed more Faster.⑧ Focus Function ZoonWhen the Backlight of [AUTO]Button is Light up, it means that the current focusing mode is the automatic; When the Backlight of [AUTO] Button is Light Off, it means that Current Focus Mode is changed to Manual. User can Press this button to switch the mode.[OPT key] is used to trigger the single focus of the camera.At the same time, the camera enters the one-shot auto focus mode.⑨PTZ Speed Adjustment KnobThis knob is used to adjust the speed of Camera Pan, Tlit and Zoom, with a total of 7 gears.The Current Gear will be display at Led Display. The Gear Value is more small then the pan/tilt rotation speed or the zoom speed of the camera controlled by the keyboard will be more Slowly.⑩ 2-Aixs JoystickThe joystick supports control camera to Up/Down, Left and Right movement. When the camera or keyboard menu is opened, the joystick is used to control the menu cursor Up/Down,Left/Right movement and modify parameters.⑪ Channel Button Zone[ CAM1 ] to [ CAM5 ] are shortcut keys for camera channels, which can be Freely switched and selected according to your need. When you select any camera channel, the backlight of the corresponding camera channel will be light up in green, and all the parameters and settings of the keyboard will be changed to the current Channel.Note: The communication parameters (address ID, protocol, baud rate, IP address, port number, etc.) of each channel can be set individually.Support mixed use of multiple protocols through different channel.⑫ Presets Function Zone●[ Number Keys ]SETING PRESETS :Long Press and hold the number key for 2 seconds (such as [Number key 1], when the screen displays "Set Preset 1” means that preset 1 has been saved) CALL PRESETS :Short press the preset number to be call Presets, (for example, [Number key 1],when you press the [Number key 1]the screen displays "Show Preset 1", it means that preset 1 has been call).●[ RESET Key ]TO BE CLEAR THE PRESET SETTINGPress[RESET key]+[Number key]to clear the preset position setting. After pressing the [RESET key], the green backlight starts to flash, Then press the preset number that needs to be cleared, (for example,[RESET]+ [Number key 1], at this time, the green Backlight of button of the [RESET key]stops flashing, and at the same time, “Reset Preset 1” is displayed on the screen, which means that preset 1 has been cleared.⑬ FOCUS KnobThis Knobs is using to adjustment camera’s focal length, Rotation right direction is adjustment focus length near, Rotation Left direction is adjustment focus length Far; (When User using this function, the keyboard’s Focus mode will be changed to Manual, It wasn’t available on AUTO Mode).⑭ Function Key Zone●[Menu Key]This key is to Turn ON/OFF Camera Menu, Long Press with 3secs will turn on Keyboard system Menu.●[AE MODE Key]This key is used to change the automatic exposure mode of the camera. Each time is pressed, the camera changes to different exposure mode. Under in difference of exposure mode, the corresponding functions of Knob 1, Knob 2 and Knob 3 are different. It is shown in real time on the display at the right of the knob.● [ WB MODE Key ]This Key is used to changed the White Balance of the camera. Each Time is pressed, the camera will be changed to different WB Mode.Under in difference ofWB mode, the corresponding functions of Knob 1, Knob 2 are different.The specific functions of the knobs are shown in Table 2:●[ Fn Keys ]This key is reserved for adding custom functions.The factory default state is: short press this key to send the command to enter theSub-menu of the camera, long press this key for 3 seconds to back Home Position of Camera.⑮ LED DISPLAYIt is used to display the current status information & Setting information of the keyboard in real time (including IP address, Port number, serial port address, communication protocol, Baud Rate and other information) and keyboard menu,the brightness of the display can be set through the keyboard menu.White Balance ModeKnob 1Knob 2AutoNOT USED NOT USED Manual Red GainBlue GainTable 2The interface is for upgrade of Hardware of keyboard by Laptop. Using Micro USB Cable direct connection with PC, And Upgrade by our upgrade tools software.This Interface is using to Connection with Camera by RS422 or RS485,detail connection diagram as follows pictures:③ RS232 InterfaceThis Interface is using to connection with Camera through RS232, detailThe LAN Interface is using for connection with Network switch or others.Network PTZ Camera, detail connection diagram as follows:●This interface is the Power supply interface, you can direct connection it with Power adapter; please don’t using non-original Power adapter.⑤ DC Power Supply Interface● Connect with multiple cameras by LAN interface detail connection diagram as follows:(When connecting multiple cameras, you need to set the IP of each camera separately1.Long Press [ MENU ] with 3secs will turn on Keyboard system Menu;2.The joystick swings up and down: control the system menu cursor to move up and down / change the parameters of the current menu item;3.The Joystick swings Right: enter the current menu item / save and exit the current menu item;4.The Joystick swings Left: Exist current Menu item/ No Saved and Exit current Menu item;5.Press [ MENU ]to exist System Menu;6.Press the number keys[0]~[9]: input numerical value (only valid for menu items that need to input numerical value). example IP Address or Port number setting.7.When the current value is number input, the green backlight of [CAM1]~[CAM5] is Light on, and at this time [CAM1]~[CAM5] Corresponds to the numbers 6~0 on the silk screen above the buttons.SYSTEM MENU 1.Long Press [ MENU ] with 3 secs will turn on Keyboard system Menu.2.The joystick swings up and down to control the menu cursor to move up and down SYSTEM SETTING The joystick swings up and down the Cursor to [ System Setting ], then Movement right to enter System Setting menu.● [ Language ]The Joystick swings up/down to [Language], then Movement right to enter setting. The Joystick swing up/down can changed the current Parameters setting, Swing the joystick to the right to save the current parameters and exit the language settingstate. The following menus operate setting is same.Optional Language: Chinese, English; other languages can be customized and developed according to customer needs.● [ LED Display Brigtness ]Change the brightness of the LED display: Low, Normal, High.● [ Automatically Standby ]Set the keyboard to automatically enter standby mode without any operation within a limited time.Select-able: Off, 1 minute, 2 minutes, 5 minutes, 10 minutes, 20 minutes, 30 minutes, 60 minutes.● [ Itself IP ]To setting Keyboard itself IP Address / Port Number, default IP is 192.168.1.88, default Port 52381.System Menu Operation & Explanation 1. System Setting 2. COMM Setting 3. Ethernet Setting 4. Password Setting1. Language : English2. LED Display Brigtness: Normal3. Automatically Standby: Off4. Itself IP: 192.168.001.0885. Itself Port: 523816. Factory default Setting7. About Keyboard●[ Factory default Setting ]To change the Keyboard restore to Factory default setting.● [ About Keyboard ]To review the relevant information of the keyboard, including: keyboard model, Firmware version, factory S/N and other information.●[ Address ]To set the serial communication address of the corresponding channel.If the current communication protocol is VISCA, the communication address can be selected from 1~7. If the current communication protocol is PELCO-D/P,The communication address can be selected from 1~255.●[ Baud Rate ]To set the serial communication Baud Rate of the corresponding channel.Available in: 2400, 4800, 9600, 19200, 38400bps.●[ Protocol ]To set the Serial communication Protocol of the corresponding channel ( Including Serial Communication Protocol and Internet Communication Protocol).Available in: VISCA, PELCO P/D, UDP .ETHERNET SETTINGTo move the cursor to [ Ethernet Setting ], then Movement right to enter Ethernet Setting:●[ Channel ]The available channels CAM1~5 correspond to the buttons [CAM1]~[CAM5].●[ Cam IP ]To set the Cam IP of the corresponding channel, which can be directly input through the number keys. When the number of input digits reaches 3, the cursor will automatically Jump to the next entry.●[ Port ]To set the UDP Port of the corresponding channel, it depend for the UDP Port 1. Channel: CAM1 2. Cam IP: 192.168.1.1623. Port: 52381PASSWORD SETTINGTo move the cursor to [ Password Setting ], then Movement right to enter Password :●[ Using Password ]How to Using the Password Function:To changed the Password setting is Enable;When the password function is Enable, a password is required to enter the menu.The default password is: 8888●[ Modify Password ]The user can change the password by himself. If the password is not changed, the password is the default password.Warning: Please use this function with caution. If the product cannot be used normally due to the password set by the customer, the manufacturer does not assume any responsibility.1. Using Password: Enabled2. Modify PasswordSYSTEM MENU GUIDE nguage: Chinese, EnglishProducts Dimensions The size for Mini Pro PTZ Controller is as below:(Unit of length: mm)。
雾化器说明书

USER INFORMATION - 使用者需知................................................................................1 About this instruction - 关于本说明书 .............................................................................. 1 Symbols - 符号................................................................................................................. 1 EU Directives and Harmonized Standards - EU 指示和符合标注 ................................... 1 EC declaration of conformity - 符合 EC 的声明 ............................................................... 2 General safety instructions - 总的安全指导 ..................................................................... 2 Markings - 标识................................................................................................................ 2 Packaging, handling and transport - 包装,处置和运输 ................................................. 3 Protection of the atomizer - 雾化器的保护....................................................................... 3 Recycling and disposal - 循环利用和处理 ....................................................................... 4 Disposal of packaging 包装的处理 .................................................................................4 Disposal of the rotary atomizer and accessories - 雾化器和附件的处理 ......................4 2.5 2.6 2.7 2.7.1 2.7.2 2.8 2.9 2.9.1 2.9.2 2.9.3 2.9.4 2.10 2.10.1 2.10.2 2.10.3 2.10.4 2.10.5
信捷伺服手册
有可能引起误动作、产品损坏。 z 产品的运行、维护
危险
1.驱动器运行后,请勿触摸电机的旋转部。 有受伤的危险。
2.请勿触摸驱动器的内部。 有触电的危险。
3.在通电状态下,请务必装上面板护罩。 有触电的危险。
2 产品的安装.......................................................................................................................................... 5 2-1.伺服电机 ................................................................................................................................ 5 2-1-1.保存温度 ...................................................................................................................... 5 2-1-2.安装场所 ...................................................................................................................... 5 2-1-3.同心度 .......................................................................................................................... 5 2-1-4.安装方向 ...................................................................................................................... 6 2-1-5.防止水滴和油滴的措施 .............................................................................................. 6 2-1-6.电线的张紧度 .............................................................................................................. 6 2-2.伺服驱动器 ............................................................................................................................ 6 2-2-1.保存温度 ...................................................................................................................... 6 2-2-2.安装场所 ...................................................................................................................... 6 2-2-3.安装方向 ...................................................................................................................... 6 2-2-4.安装标准 ...................................................................................................................... 7
川崎M 系列机器人 保养维护手册教学文案
川崎M系列机器人保养维护手册前言本手册介绍了川崎机器人MX系列、MD系列、MT400N的检查与维护的方法。
在进行任何操作前,请务必透彻阅读理解本手册和安全手册的内容,并严格遵守所有安全规则。
有关机器人手臂和控制器的安装与连接信息,请分别参阅相应的手册。
再次提醒,在完全理解本手册的内容之前,请不要执行任何操作。
对于只按照本手册中有限部分内容进行操作而导致的事故或损害,川崎公司将不会承担任何责任。
1.本手册并不构成对使用机器人的整个应用系统的担保。
因此,川崎公司将不会对使用这样的系统而可能导致的事故、损害、和(或)与工业产权相关的问题承担责任。
2.川崎公司郑重建议:所有参与机器人操作、示教、维护、维修、点检的人员,预先参加川崎公司准备的培训课程。
3.川崎公司保留未经预先通知而改变、修订或更新本手册的权利。
4.事先未经川崎公司书面许可,不可将本手册全部或其中的一部分再版或复制。
5.请将本手册小心保管好,以便随时使用。
机器人如果需要重新安装、或搬运到不同地点、或卖给其他用户时,请务必将本手册附上。
一旦出现丢失或严重损坏,请和您的川崎公司代理商联络。
川崎重工版权所有符号在本手册中,下述符号的内容应特别注意。
为确保机器人的正确安全操作、防止人员伤害和财产损失,请遵守下述方框符号表达的安全信息。
1.0 注意事项 ····························································································· 42.0 检查与维护项目 ·············································································· 10 2.1 MX500N 、MX420L 、MX350L 型号机器人的检查与维护项目 ················ 11 2.2 MX700N 型号机器人的检查与维护项目 ··············································· 12 2.3 MD400N 型号机器人的检查与维护项目 ··················································· 13 2.4 MD500N 型号机器人的检查与维护项目 ··················································· 14 2.5 MT400N 型号机器人的检查与维护项目 ···················································· 153.0 日常检查的详细内容 ········································································ 164.0 补充和更换 ····················································································· 17 4.1 JT1齿轮的润滑脂补充、润滑油补充及更换(MX 系列、MD400N 、MT400N )····································································································· 18 4.1.1 JT1齿轮的润滑脂补充(MX 系列、MD 系列、MT400N ) ······················· 18 4.1.2 齿轮箱的润滑油补充(MX 系列、MD 系列、MT400N ) ·························· 19 4.1.3 齿轮箱的润滑油更换(MX 系列、MD 系列、MT400N ) ·························· 20 4.2 JT2减速机的润滑脂更换(MX 系列、MD 系列、MT400N ) ················· 21 4.2.1 JT2齿轮箱的润滑脂更换(MX700N ) ···················································· 22 4.3 JT3减速机的润滑脂更换(MX 系列、MD 系列、MT400N ) ···················· 23 4.3.1 JT3齿轮箱的润滑脂更换(MX700N 、MD500N ) ·································· 24 4.4 手腕(JT4、5、6)驱动齿轮的润滑脂更换(MX 系列) ······················ 25 4.5 手腕(JT4、5、6)驱动齿轮的润滑脂更换(MT400N ) ··························· 26 4.6 JT4齿轮和减速机的润滑脂更换(MX 系列) ············································ 27 4.7 JT4齿轮和减速机的润滑脂更换(MD 系列) ········································ 28 4.8 JT4齿轮和减速机的润滑脂更换(MT400N ) ······································· 29 4.9 JT5齿轮和减速机的润滑脂更换(MX 系列) ······································· 30 4.10 JT5减速机的润滑脂更换(MD 系列) ··············································· 31 4.11 JT5齿轮和减速机的润滑脂更换(MT400N ) ······································ 32 4.12 JT6齿轮和减速机的润滑脂更换(MX 系列) ······································ 33 4.13 JT6齿轮和减速机的润滑脂更换(MT400N ) ······································ 34 4.14 JT1交叉滚子轴承的润滑脂补充 (MX 系列、MD 系列、MT400N ) ·········· 35 4.15 JT3交叉滚子轴承的润滑脂补充 (MX 系列、MD 系列、MT400N ) ·········· 365.0 内部机器电缆检查·············································································· 376.0 重新紧固·························································································381.0注意事项对川崎机器人进行维护操作之前,请注意如下事项以确保安全。
MG995 945 995舵机的参考资料

•舵机的工作原理:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。
就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。
•舵机的控制:舵机的控制一般需要一个20ms的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。
以180度角度舵机为例,那么对应的控制关系是这样的:0.5ms--------------0度;1.0ms------------45度;1.5ms------------90度;2.0ms-----------135度;2.5ms-----------180度;请看下形象描述吧:•舵机的工作电压和电流:每一款舵机都有自己的参数,如TR213舵机的工作电压是4.8-7.2V,TR205舵机的工作电压是4.8-6V,电压不能超过这个范围,否则会很容易烧坏舵机,在不清楚舵机工作电压范围的情况下,建议使用5V给舵机供电。
舵机的工作电流是根据舵机的实际情况而定的,如TR213舵机,在空载的时候电流几乎为0,而在正常负载的情况下,电流在0.5A左右,视实际情况而定。
六足机器人需要18个TR213金属舵机,需要提高的电流大概在8A左右,如果电源功率不够会影响舵机的性能,最常见的现象是,当一个舵机负载的时候,其他舵机会出现混乱,无规律的乱摆。
•舵机三根线的区分:信号线接单片机I/O口,由于舵机内部有驱动电路,所以可以直接用普通的单片机I/O口直接控制;电源正极,接输入电源的正极;地线,接输入电源的负极;备注:如果控制部分和电源部分是分开的,两者一定要共地。
CE1021 TECHNICAL DESCRIPTION

36.26 Qmax.= 1456 m3/h
本技术方案为海门依科过滤设备有限公司的知识产权,未经允许不可随意使用,保留追诉的权利。 第 3 页 共 36 页
CE1021 上柴
海门依科过滤设备有限公司
PREAMBLE - 摘要 Installation as follow/过滤系统包括: 1 Dredge 82 m3 / 1 台粗过滤机 82 m3 1 Vacuum filter 36.4m² –138m3 with endless belt 1 台真空负压过滤机 36.4m² –138m3 配循环过滤带 1 Clean tank 27m3/ 1 个净液箱 27m3 5 Supplying pumps (4 working + 1 stand-by) / 5 台供液泵(4 台工作+1 台备用) 1 Automatic coolant filling-with storage tank 2m3, pump and electrical counters 1 套全自动冷却液加注系统,配储存箱 2m3,泵和计量表。 1 Belt deoiler / 1 台带式撇油器 1 Cooling system including / 1 套制冷设备包含: 1 Heat exchanger 900 kW / 1 台热交换器 900 kW 1 online centrifuge pumps / 1 台在线离心增压泵 1 set of Regulation valve and accessories / 1 套调节阀及附件 1 heating device 360 kW / 1 套加热装置 360 kW 4 (3 working 1 stand-by)50 µm automatic back-flush safety filter RF3-5/KS50 4 台(3 台工作+1 台备用)50 µm 自反洗安全过滤器 RF3-5/KS50 1 Chips extracting system mainly including / 1 套废屑分离设备主要包含: 1 Conveyor between filter and dredge / 1 个输送器,位于粗过滤机和精过滤机之间。 1 wringer for drying chips / 1 台离心式废屑甩干机 1 Chips conveyor / 1 台废屑输送器 1 paper filter for emulsion treatment 1 台乳化液处理纸带过滤机 1 Electrical panel / 1 个电控柜 1 Draining tank 220 m3common for head and block line+ Draining pump. 1 个备用箱 220 m3,缸盖线和缸体线过滤系统共用 + 排放泵。 10 pump back stations for local special machines / 10 个回液提升泵站用于国产专机的回液 1 Set of supplying and returning pipes (including supports) 1 套供回液管道(包含管道支架)
WH-GM35硬件设计手册说明书

WH-GM35硬件设计手册文件版本:V1.0.0目录目录 (2)1 绪论 (4)1.1 相关文档 (4)1.2 术语和解释 (5)1.3 安全警告 (7)2 GM35综述 (8)2.1 GM35 主要特性 (8)2.2 GM35 功能框图 (10)3 应用接口 (11)3.1 GM35 引脚描述 (11)3.2 供电 (13)3.3.1 电源引脚 (14)3.3 开机关机 (15)3.3.1 GM35开机 (15)3.3.2 GM35关机 (16)3.4 模块休眠唤醒功能 (16)3.4.1 模块SLEEP 模式 (16)3.4.2 模块SLEEP电流 (16)3.4.3 模块收到电话、短信唤醒主控 (17)3.5 GPIO,INT,UART等交互设计要点 (18)3.6 串口 (18)3.6.1 串口功能 (20)3.7 音频接口 (21)3.7.1 受话器接口电路 (22)3.7.2 麦克风接口电路 (23)3.8 SIM卡接口 (23)3.8.1 SIM应用 (23)3.8.2 SIM卡座的选择 (25)3.9 外部复位输入 (28)4 天线接口 (29)4.1 模块射频输出功率 (30)4.2 模块射频接收灵敏度 (30)4.3 模块工作频率 (30)5 电气,可靠性和射频特性 (31)5.1 绝对最大值 (31)5.2 工作温度 (31)5.3 电源额定值 (32)5.4 耗流 (33)5.5 静电防护 (34)6 机械尺寸 (35)6.1 GM35的机械尺寸 (35)6.2 GM35引脚分配 (36)6.3 GM35推荐焊接炉温曲线图 (37)7 联系方式 (38)8 免责声明 (39)9 更新历史 (40)1 绪论1.1 相关文档本文档描述了GM35的硬件应用接口,包括相关应用场合的电路连接以及射频接口等。
GM35的应用十分广泛,本文档将详细介绍GM35的所有功能。
本文档可以帮助用户快速的了解GM35的接口定义、电气性能和结构尺寸的详细信息。
达明机器人TM5硬件设置说明书

TM5 Guide Book硬体版号: 1.00软体版号: 1.62ii Release Date : 2018-05-09iii本文所有资讯属于达明机器人(股)公司(以下简称本公司)财产,未经本公司事先授权不得以任何形式或方式转载及复制任何资料。
本文任何资讯不应视为任何要约或是承诺,日后如有变更,恕不另行通知。
本说明书应定期审查,本公司不会对本文任何错误或是遗漏承担责任。
和 标志为达明机器人(股)公司注册商标,本公司保留本说明书及其拷贝的所有权及其著作权。
I 硬体设置说明1.安全性资讯1.1 概说1.2 确效与责任1.3 责任限制1.4 安全警示符号1.5 整体性安全警示1.6 使用范围1.7 风险评估1.8 紧急停止1.9 无驱动力时的关节转动2 安全功能与介面2.1 概说2.2 安全系统停止时间2.3 安全相关限制机制2.4奇异点/奇异空间2.5 安全设定2.5.1操作位置2.6 操作模式2.6.1 自动模式2.6.2 手动模式2.6.2.1 手动控制模式2.6.2.2 手动试跑模式2.6.3 操作模式切换2.7 按压执行3 搬运4 系统硬体4.1 概说4.2系统整体4.2.1 机器人本体4.2.1.1 机器人活动范围4.2.1.2机器人最大容许负载4.2.1.3 机器人本体安装4.2.2 机器人末端模组4.2.2.1 末端模组构成4.2.2.2 末端法兰面4.2.2.3 末端安装注意4.2.2.4 末端指示灯环灯光表4.2.3 电控箱4.2.3.1 机器人控制棒2 2 2 2 4 5 6 6 7 8 9 10 10 14 15 16 16 16 16 16 17 1718 19 19 20 20 24 25 26 26 28 29 29 30 31iv5 电气介面5.1 概说5.2 电气警告与注意事项5.3 控制箱5.3.1 安全接口5.3.2 电源接口5.3.3 数位输入/输出5.3.4 模拟输入5.3.5 模拟输出5.3.6 EtherCAT:扩展EtherCAT从站I / O用5.3.7 USB端口5.4 工具端I/O介面5.4.1 I/O 端子5.4.2 连接工具端数位输出5.4.3 连接工具端数位输入5.4.4 连接工具端模拟输入5.5 电控箱各介面5.6 电控箱主电源介面及与机器人连接介面5.6.1 电控箱主电源介面5.6.2 机器人连接介面6 维护与维修7 保证与声明7.1 产品保证7.2 免责声明附录A. 第二类停止时间与距离表附录B. Technical Specifications 333334343636383939394040414142424343444545464748vviI Hardware Installation Manual 硬体设置说明硬体版号: 1.00软体版号: 1.62121. 安全性资讯1.1 概说本章记载Techman Robot的重要安全性资讯,Techman Robot的使用者,系统整合者于使用本机器人前必须先行详尽阅读并充分了解本章内容。
SCHUNK 电动手柄类型 GMW 1 装配与运行手册说明书

Gripper actuator type GMWDear Customer,Congratulations on choosing a SCHUNK product. By choosing SCHUNK, you have opted for the highest precision, top quality and best service.You are going to increase the process reliability of your production and achieve best machining results – to the customer's complete satisfaction.SCHUNK products are inspiring.Our detailed assembly and operation manual will support you.Do you have further questions? You may contact us at any time – even after purchase. You can reach us directly at the mentioned addresses in the last chapter of these instructions.Kindest Regards,Your SCHUNK GmbH & Co. KG Precision Workholding Systems Bahnhofstr. 106 - 134 D-74348 Lauffen/ NeckarTel. +49-7133-103-2503 Fax +49-7133-103-2189********************.com Document last updated: 23.02.2010G RIPPER ACTUATORT YPESGMW 12 TO GMW 28Gripper actuator type GMWContents1SAFETY (3)1.1S YMBOL KEY (3)1.2A PPROPRIATE U SE (3)1.3S AFETY N OTES (4)1.4I NDICATIONS TO THE OPERATING MANUAL (4)2WARRANTY (5)3SCOPE OF DELIVERY (5)4TECHNICAL DATA (5)5OPERATING AND ENVIRONMENTAL CONDITIONS (5)6ASSEMBLY AND INSTALLATION (6)6.1D ESIGN PRECAUTIONS (6)6.2C OMPRESSED AIR SUPPLY (6)6.3S PECIAL CONNECTING MEASURES (6)6.4A SSEMBLY MEASURES (7)6.5M EASURES FOR THE INITIAL OPERATION (7)7HANDLING (8)7.1G RIPPING FORCE MAINTENANCE (8)7.2R OTARY ADAPTER (9)7.3E ND POSITION INTERROGATION (9)7.4M ODULAR DESIGN (10)8REPAIRS (10)9RESPONSE TO MALFUNCTIONS (11)10MAINTENANCE AND CARE (11)11REPLACEMENT PARTS (12)12EC DECLARATION OF INCORPORATION (13)13CONTACT (14)Gripper actuator type GMW1 Safety1.1 Symbol keyYou will find this symbol wherever hazards for persons or damage to the productare possible.This symbol indicates important information on the product or its handling.1.2 Appropriate UseThe unit must only be used within the scope of its technical data. Appropriate use also in-cludes compliance with the conditions the manufacturer has specified for commissioning, as-sembly, operation, environment and maintenance. Using the unit with disregard to even a mi-nor specification will be deemed inappropriate use. The manufacturer assumes no liability for any injury or damage resulting from inappropriate use.The gripper actuators are manufactured in accordance with the current level of technology and with recognised safety regulations. During their use, however, there may occur risks to life and limb of the user or impairment of the portal actuator and other material assets.The gripper actuators are intended exclusively for the parallel gripping of service loads in any position that do not react in their manipulation with any risk to persons, property or the envi-ronment.The maximum permissible service loads and forces are given in our standard catalogue.Any usage beyond these definitions is inappropriate.The manufacturer cannot be held liable for loss or damage arising therefrom. The risk is borne exclusively by the user.The gripper actuator must only be operated by persons that are familiar therewith and that have been instructed in the associated hazards. The relevant accident prevention regulations and the other generally recognised safety and occupational health regulations must be com-plied with.Gripper actuator type GMW1.3 Safety Notes1.Responsibility for the compatibility of pneumatic equipment lies with the person who designs the pneumatic system or takes the decision on its specifications.- Since the products specified herein can be used under various operatingconditions, their compatibility with the appropriate pneumatic system must be based on specifications and/or tests in order to conform to their require-ments.2.Machines and equipment operated by pneumatic means may only be used by trained personnel.- Compressed air can be hazardous if an operator is not familiar with its use.The assembly, handling or repair of pneumatic systems is to be undertakenby trained and experienced personnel.3.Do not carry out maintenance work on machines and equipment and do not at-tempt to remove components until it has been confirmed that it is safe to do so.- Inspection and maintenance of machines and equipment may only be car-ried out after it has been confirmed that the devices that must be switched off are in a securely deactivated condition. - If machine parts must be removed, carry out safety precautions as men-tioned above. Deactivate the compressed air supply to this machine and re-lease any remaining compressed air from the system.- Before machines and equipment are switched on again, take measures toensure that cylinder rods etc. are not pushed outwards. Allow compressed air to enter the system slowly so that counterpressure builds up gradually.4. Contact SCHUNK (see chapter Fehler! Verweisquelle konnte nicht gefunden werden.page Fehler! Textmarke nicht definiert.) if the product is to be used under one of the following conditions:- Conditions and environments that lie outside the stated specifications, orwhere the product is to be used outdoors. - Installation in equipment in conjunction with nuclear power, railways, aero-space, vehicles, medical equipment, food and drink, leisure equipment,emergency shutdown circuits, applications in presses or safety equipment. - Any application that may possibly have negative influences on persons, an-imals or property and that requires a special safety analysis.5. This user manual should always be easily accessible.1.4 Indications to the operating manualThis user manual describes gripper actuators of series GMW 12, 16, 20 and 28. All statements in this user manual refer to the types stated above.Gripper actuator type GMW2 WarrantyThe warranty period is 24 months or 40 million load cycles after delivery date from the factory, assuming use in single-shift operation and that the recommended maintenance and lubrication intervals are respected. Components that come into contact with workpieces, wearing parts, shock absorbers, stop screws and proximity switches are never included in the warranty.The warranty covers the replacement or repair of defective parts in the manufacturing plant. Further claims are hereby excluded. In this context, please also see our General Terms and Conditions.3 Scope of DeliveryThe scope of delivery comprises:- Gripper actuator GMW, depending on the version ordered4 Technical DataPlease consult our catalogue for further technical details. The last version is valid in each case. (in accordance with Chapter 2.3 General Terms and Conditions)The airborne sound emitted from the unit is <= 70dB(A)5 Operating and environmental conditions- Do not use the product in environments comprising corrosive gases, salt water, water or vapours.- For use in an atmosphere where water drops, oil, sprays etc, occur take appropriate countermeasures in order to ensure protection.- If electronic end switches are to be used, these should not be used in the presence of strong magnetic fields.- Please contact SCHUNK (see chapter 13 page 14) if the product is to be used in the presence of strong magnetic fields.- Do not use the gripper actuator in an atmosphere in which it could come into contact with fluids such as oil or water.- Do not use the gripper actuator in an atmosphere in which it could come into direct contact with substances such as powder dust, dust, sprays etc.- Do not use the gripper actuator in an atmosphere in which sources of heat are present.- Do not subject the gripper actuator to excessive vibrations and/or shocks.Gripper actuator type GMW6 Assembly and Installation6.1 Design precautions- A protective guard is recommended in order to minimise the risk of injury.- Ensure that loose, fixed and/or connected parts or tightened securely.- Take account of the possibility that the operating pressure may decrease as a result of power failures etc.- Pay attention to the possibility of the failure of power supplies.- Mount the compressed air supply in such a way as to prevent a gripping action.- Pay attention to emergency shutdown facilities.- Pay attention to what will happen after an emergency stop or abnormal stoppage.Ensure that nobody can be placed at risk or be injured when equipment is restarted.6.2 Compressed air supply- Use clean compressed air and insert a filter between the supply and the pneumatic system.- Install a water separator in the pneumatic system.- Use the product only within the range specified for the medium temperature and ambient temperature.Air specification- dry (free from condensation)- filtered to 10 microns- oiled or oil-free6.3 Special connecting measures- Use connecting pipes of a cross-section that is larger than or identical to that of the connector thread.- Blow air through the connecting pipes before fitting the devices in order to remove any dust, contaminant or particles.- Avoid the ingress of sealing material into the pipe network.- Do not remove pneumatic components from their packaging until shortly before fitting.Gripper actuator type GMW6.4 Assembly measures- During the mounting of the gripper actuator or gripper jaws on the gripper actuator, do not allow the system to be subjected to impermissible forces or moments.- The flatness of the mounting surfaces must be less than 0.02mm.- Avoid contact with the gripper actuator during operation.- Select a suitable screw tightening torque for mounting of the gripper actuator or loads on the gripper actuator in accordance with the generally valid guidelines for screwconnections.6.5 Measures for the initial operationPlease read this user manual carefully. Knowledge of this user manual is essential inorder to prevent errors and ensure problem-free operation.Under no circumstances may gripper actuators be operated with oiled air if theyare subsequently to be operated with oil-free air.- Check the technical specifications.- Do not use the device until you have checked that it functions correctly taking account of all permissible operating parameters.- Regulate the operating speed of the cylinder by means of throttle type non-return valves. Increase from the low speed to higher speeds until the required operatingspeed is reached.Selection and dimensioning- Do not subject the units to loads that exceed the limits of their operating range. If excessive loads are applied , the gripper jaw guidance system and closing mechan-ism could suffer damage or inaccuracies. The maximum permissible loads are givenin our standard catalogue.- Do not allow the system to experience impermissible forces or shocks and do not use excessively long gripper jaws. The maximum permissible gripper jaw length is givenin our standard catalogue.Gripper actuator type GMW7 Handling7.1 Gripping force maintenanceIn order to secure the grip force in the event of pressure loss, an additional module can be fitted without the need for further accessories. The gripping force maintenance is available for operation in either a clamping or an expanding direction.Ordering numbers of Grip force safety device:- GKE 12 for gripper actuator GMW 12 - GKE 16 for gripper actuator GMW 16 - GKE 20 for gripper actuator GMW 20 -GKE 28 for gripper actuator GMW 28If a gripper actuator including a gripping force maintenance as described in our standard cata-logue is ordered, it is supplied with the spring already installed by SCHUNK.Figure 1: gripping force maintenanceIn order to switch the gripping force maintenance from clamping to expanding mode, the lock-ing disc (Pos. 8) is fitted in the upper groove in the rod (Pos. 2). LegendGWB – angled gripper set GMD – rotary adapter GMA – drive unitGKE – gripping force maintenanceGripper actuator type GMW7.2 Rotary adapterFor stepless rotation of the gripper set GWB-... on the drive unit GMA-... a rotary adapter GMD-... is available. This is installed between the gripper set and drive unit.Ordering numbers of the rotary adapter:- GMD 12 for gripper actuator GMW 12 - GMD 16 for gripper actuator GMW 16 - GMD 20 for gripper actuator GMW 20 - GMD 28 for gripper actuator GMW 28If a gripper actuator including a rotary adapter as described in our complete catalogue is ordered, it is supplied with the rotary adapter already installed by SCHUNK.7.3 End position interrogationStandardised interrogation sets for direct mounting are available for interrogation of end positions.- Proximity switch - complete GMNS-...The scope of delivery includes:- 1x retaining element - 1x proximity switch - 1x connection cableFigure 2: position from the proximity switchAfter the clamping screw has been loosened, the proximity switch can be set by means of the retaining element. Interrogation is carried out on the single-piece piston rod of the drive unit. It is possible to install up to 4 interrogation sets in types GMW 16, GMW 20 and GMW as shown, allowing interrogation of 4 gripper jaw positions. Only 2 interrogation sets can be installed in type GMW 12.In order to fit the retaining elements, the cover of the drive unit or the gripping force maintenance must be removed. This is not necessary for fitting of the prox-imity switch.Proximity switch (GMNS-...)Gripper actuator type GMW7.4 Modular designGripper actuators of this series are of a completely modular design. All components are separate entities in terms of function. It is thus possible, on the basis of a small number of components, to configure a large number of different gripper actuators and gripper/indexing actuators. The diagram below shows the complete modular set for configuration of parallel gripper actuators GMP-... and angled gripper actuators GMW-... as well as 3 jaw gripper actuators GMC ...Figure 3: modular design8RepairsThe repair or elimination of defects on our products by the customer may only be car-ried out with our explicit written agreement. Any failure to adhere to this principle ren-ders invalid our warranty and liability for any resulting warranty or secondary losses.Following receipt and examination, all gripper actuators of series GMW can be repaired by SCHUNK.LegendGCB – 3 jaw gripper set GPB – parallel gripper set GWB – angled gripper set GMD – rotary adapter RM – rotary actuator RZ – intermediate stop GMA – drive unitGKE – gripping force maintenanceGripper actuator type GMW9Response to malfunctionsMalfunctions that are caused by defective components may only be remedied by replacement of these components.Defective components may only be replaced by SCHUNK genuine replacement parts.10 Maintenance and CareUnder no circumstances may gripper actuators be operated with oiled air if they are subsequently to be operated with oil-free air.- The integral cylinders are lubricated for life and do not require relubrication.Operation with oiled or oil-free compressed air is permissible without restrictions. -The complete mechanism is already lubricated. It is not therefore necessary to lubricate this again before operation.Lubrication or relubrication of the mechanism with rolling bearing grease is recommended after approx. 4 million cycles.-All gripper actuators of series GMW are maintenance-free. In order to achieve the maximum operating life, this chapter and chapter 6 (at page 6) of this user manual should be observed.-Apart from normal cleaning of machines, no further maintenance measures are necessary.Gripper actuator type GMW11 Replacement partsAs standardised wear part sets, seal sets are available. The scope of delivery includes all seals.Ordering numbers of the seal sets:- GMDI 12 for gripper actuator GMW 12- GMDI 16 for gripper actuator GMW 16- GMDI 20 for gripper actuator GMW 20- GMDI 28 for gripper actuator GMW 28In accordance with the section drawing below, all other wear parts and individual parts are available as single items.Ordering numbers are as indicated in the following example- GMA- Part-No. 1 GMA 20-01- GWB- Part-No. 2 GWB 20-02Figure 4: section drawing GMWGripper actuator type GMW12 EC declaration of incorporationIn terms of the EC Machinery Directive 2006/42/EC, annex II BManufacturer/ distributorSCHUNK GmbH & Co. KG. Spann- und Greiftechnik Bahnhofstr. 106 – 13474348 Lauffen/Neckar, GermanyWe hereby declare that the following product:Product designation Angular Gripper Type designation: GMW 12...GMW 28 ID number: 0313140 (0313181)meets the applicable basic requirements of the Directive Machinery (2006/42/EC).The incomplete machine may not be put into operation until conformity of the machine into which the incomplete machine is to be installed with the provisions of the Machinery Directive (2006/42/EC) is con-firmed.Applied harmonized standards, especially:EN ISO 12100-1 Safety of machines - Basic concepts, general principles for design -- Part 1: Basic terminology, methodologyEN ISO 12100-2 Safety of machines - Basic concepts, general principles for design -- Part 2: Technical principlesThe manufacturer agrees to forward on demand the special technical documents for the incomplete ma-chine to state offices.The special technical documents according to Annex VII, Part B, belonging to the incomplete machine have been created.Person responsible for documentation: Mr. Michael Eckert, Tel.: +49(0)7133/103-2204Location, date/signature: Lauffen, Germany, January 2011 p.p.Title of the signatoryDirector for DevelopmentGripper actuator type GMW13 ContactGERMANY – HEAD OFFICE SCHUNK GmbH & Co. KG Spann- und Greiftechnik Bahnhofstrasse 106 – 134 D-Lauffen/Neckar Tel. +49-7133-103-0 Fax +49-7133-103-2399 **************.com CANADASCHUNK Intec Corp. 190 Britannia Road East, Units 23-24Mississauga, ON L4Z 1W6 Tel. +1-905-712-2200 Fax +1-905-712-2210 **************.com DENMARKSCHUNK Intec A/S Storhaven 7 7100 VejleTel. +45-43601339 Fax +45-43601492 **************.com HUNGARYSCHUNK Intec Kft. Széchenyi út. 70. 3530 MiskolcTel. +36-46-50900-7 Fax +36-46-50900-6 **************.comAUSTRIASCHUNK Intec GmbH Holzbauernstr. 20 4050 TraunTel. +43-7229-65770-0 Fax +43-7229-65770-14 **************.com CHINASCHUNK Intec PrecisionMachinery Trading (Shanghai) Co., Ltd.Xinzhuang Industrial Park 479 Chundong Road Minhang District Shanghai 201108Tel. +86-21-51760266 Fax +86-21-51760267 **************.com FRANCESCHUNK Intec SARLParc d´Activités des Trois Noy-ers 15, Avenue James de Roth-schildFerrières-en-Brie77614 Marne-la-Vallée Cedex 3Tel. +33-1-64 66 38 24 Fax +33-1-64 66 38 23 **************.com INDIASCHUNK Intec India Private Ltd. # 80 B, Yeswanthpur Industrial Suburbs, Bangalore 560 022 Tel. +91-80-40538999 Fax +91-80-41277363 **************.comBELGIUM, LUXEMBOURG SCHUNK Intec N.V./S.A. Bedrijvencentrum Regio Aalst Industrielaan 4, Zuid III 9320 Aalst-Erembodegem Tel. +32-53-853504 Fax +32-53-836022 **************.com CZECH REPUBLIC SCHUNK Intec s.r.o. Drážni 7 627 00 BrnoTel. +420-545 229 095 Fax +420-545 220 508 **************.com GREAT BRITAIN, IRELAND SCHUNK Intec Ltd.Cromwell Business Centre 10 Howard Way, Interchange ParkNewport Pagnell MK16 9QS Tel. +44-1908-611127 Fax +44-1908-615525 **************.com ITALYSCHUNK Intec S.r.l. Via Barozzo22075 Lurate Caccivio (CO) Tel. +39-031-4951311 Fax +39-031-4951301 **************.com Gripper actuator type GMWJAPANSCHUNK Intec K.K. 45-28 3-Chome Sanno Ohta-Ku Tokyo 143-0023 Tel. +81-33-7743731 Fax +81-33-7766500********************.jp www.tbk-hand.co.jpPOLANDSCHUNK Intec Sp.z o.o. ul. Słoneczna 116 A Stara Iwiczna05-500 Piaseczno Tel. +48-22-7262500 Fax +48-22-7262525 **************.com SOUTH KOREASCHUNK Intec Korea Ltd. # 907 Joongang Induspia 2 Bldg.,144-5 Sangdaewon-dong Jungwon-gu, Seongnam-si Kyunggi-do, 462-722 Tel. +82-31-7376141 Fax +82-31-7376142 **************.com SWITZERLAND, LIECHTENSTEIN SCHUNK Intec AG Im Ifang 12 8307 EffretikonTel. +41-523543131 Fax +41-523543130 **************.com MEXICO, VENEZUELA SCHUNK Intec S.A. de C.V. Calle Pirineos # 513 Nave 6Zona Industrial Benito Juárez Santiago de Querétaro, Qro. 76120Tel. +52-442-211-7800 Fax +52-442-211-7829 **************.com Tel. +7-812-326-78-35 Fax +7-812-326-78-38 **************.comSPAIN, PORTUGAL SCHUNK Intec S.L. Foneria, 2708304 Mataró (Barcelona) Tel. +34-937 556 020 Fax +34-937 908 692 **************.com TURKEYSCHUNK IntecBağlama Sistemleri veOtomasyon San. ve Tic. Ltd. Şti.Küçükyali Iş Merkezi Girne MahallesiIrmak Sodak, A Blok, No: 9 34852 Maltepe, Istanbul Tel. +90-216-366-2111 Fax +90-216-366-2277 **************.com NETHERLANDSSCHUNK Intec B.V. Speldenmakerstraat 3d 5232 BH ‘s -Hertogenbosch Tel. +31-73-6441779 Fax +31-73-6448025 **************.com SLOVAKIASCHUNK Intec s.r.o. Mostná 62 949 01 NitraTel. +421-37-3260610 Fax +421-37-6421906 **************.com SWEDENSCHUNK Intec AB Morabergsvägen 28 152 42 SödertäljeTel. +46-8 554 421 00 Fax +46-8 554 421 01 **************.com USASCHUNK Intec Inc. 211 Kitty Hawk Drive Morrisville, NC 27560 Tel. +1-919-572-2705 Fax +1-919-572-2818 **************.com Gripper actuator type GMW。
GM Gen III IV小型机械系列引擎的详细分析说明书
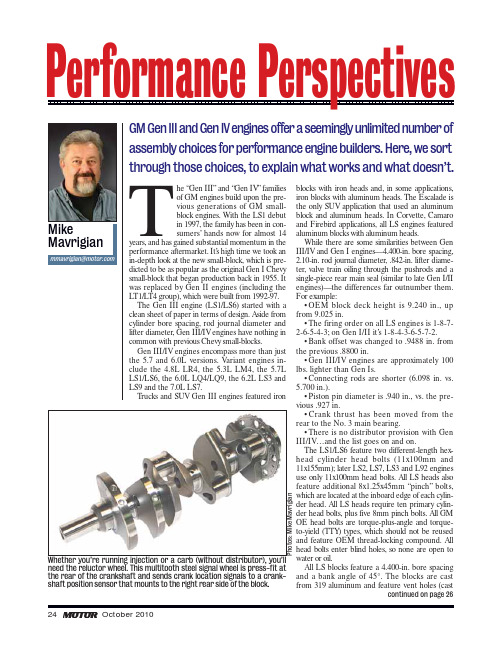
MikeMavrigian********************The “Gen III” and “Gen IV” families of GM engines build upon the pre-vious generations of GM small-block engines. With the LS1 debut in 1997, the family has been in con-sumers’ hands now for almost 14years, and has gained substantial momentum in the performance aftermarket. It’s high time we took an in-depth look at the new small-block, which is pre-dicted to be as popular as the original Gen I Chevy small-block that began production back in 1955. It was replaced by Gen II engines (including the LT1/LT4 group), which were built from 1992-97.The Gen III engine (LS1/LS6) started with a clean sheet of paper in terms of design. Aside from cylinder bore spacing, rod journal diameter and lifter diameter, Gen III/IV engines have nothing in common with previous Chevy small-blocks.Gen III/IV engines encompass more than just the 5.7 and 6.0L versions. Variant engines in-clude the 4.8L LR4, the 5.3L LM4, the 5.7L LS1/LS6, the 6.0L LQ4/LQ9, the 6.2L LS3 and LS9 and the 7.0L LS7.Trucks and SUV Gen III engines featured ironblocks with iron heads and, in some applications,iron blocks with aluminum heads. The Escalade is the only SUV application that used an aluminum block and aluminum heads. In Corvette, Camaro and Firebird applications, all LS engines featured aluminum blocks with aluminum heads.While there are some similarities between Gen III/IV and Gen I engines—4.400-in. bore spacing,2.10-in. rod journal diameter, .842-in. lifter diame-ter, valve train oiling through the pushrods and a single-piece rear main seal (similar to late Gen I/II engines)—the differences far outnumber them.For example:•OEM block deck height is 9.240 in., up from 9.025 in.•The firing order on all LS engines is 1-8-7-2-6-5-4-3; on Gen I/II it’s 1-8-4-3-6-5-7-2.•Bank offset was changed to .9488 in. from the previous .8800 in.•Gen III/IV engines are approximately 100lbs. lighter than Gen Is.•Connecting rods are shorter (6.098 in. vs.5.700 in.).•Piston pin diameter is .940 in., vs. the pre-vious .927 in.•Crank thrust has been moved from the rear to the No. 3 main bearing.•There is no distributor provision with Gen III/IV…and the list goes on and on.The LS1/LS6 feature two different-length hex-head cylinder head bolts (11x100mm and 11x155mm); later LS2, LS7, LS3 and L92 engines use only 11x100mm head bolts. All LS heads also feature additional 8x1.25x45mm “pinch” bolts,which are located at the inboard edge of each cylin-der head. All LS heads require ten primary cylin-der head bolts, plus five 8mm pinch bolts. All GM OE head bolts are torque-plus-angle and torque-to-yield (TTY) types, which should not be reused and feature OEM thread-locking compound. All head bolts enter blind holes, so none are open to water or oil.All LS blocks feature a 4.400-in. bore spacing and a bank angle of 45°. The blocks are cast from 319 aluminum and feature vent holes (castGM Gen III and Gen IV engines offer a seemingly unlimited number of assembly choices for performance engine builders. Here, we sortthrough those choices, to explain what works and what doesn’t.P h o t o s : M i k e M a v r i g i a nWhether you’re running injection or a carb (without distributor), you’ll need the reluctor wheel. This multitooth steel signal wheel is press-fit at the rear of the crankshaft and sends crank location signals to a crank-shaft position sensor that mounts to the right rear side of the block.continued on page 26a must. The new liners are installed at 270°F , and liners are then torqued three times during the cooling process. Liner bottoms must also be notched for rod clearance. The block is then decked, the main caps are installed and the main bore is bored or honed. The block is then dou-ble-vacuum-impregnated. The liners are then bored and honed for individual pis-ton fit. My point is that the LS aluminum block sleeves are not installed in the “tra-ditional” method. If resleeving is needed,it must be handled only by a shop that is skilled and experienced in LS sleeving.All LS cranks are created equal…sort of. All feature a 2.65-in. main journal and 2.100-in. rod journals, and all use the same rear main seal. All OE cranks are iron, except for the LS7 and LS9, which are fitted with forged steel cranks. Also,the LS7 features a 4.00-in. stroke; others feature a 3.62-in. stroke.Although not a permanent component of the crankshaft, the reluctor wheel tooth count can vary, with either a 24- or 58-tooth count. Early LS engines fea-tured the 24-tooth wheel, which was phased out in favor of the 58-tooth wheel.It really doesn’t matter, as long as you match the tooth count with the appropri-ate ignition controller and crank sensor.Also, be aware that the crankshaft snout is longer (by about an inch) on LS7/LS9 applications, to accommodatethe main bores must be machined to correct a roundness or center issue,oversize-O.D. main bearings would be required. The LS7 is the only version that came with forged billet main caps.All other LS main caps are powdered metal (PM) iron.LS series engines utilize a front-mounted keyed, crank-driven oil pump.All OE LS cranks are cast, again with the exception of the LS7 cranks, which are forged. The LS1/LS6 blocks, though sharing the same dimensions, differ somewhat, with the LS6 block featuring slight changes in main web design for crossover breathing (the LS6 block main webs are slightly skeletonized). Crank-shaft counterweights are cam-ground to clear piston skirts. This cam grinding also makes crank balancing a bit easier.If sleeving is required for a conven-tional aluminum block, the cylinders are bored to size, then honed to size for each individual liner. Sleeving an LS block is fairly tricky, and LS–specific experience isPerformance Perspectivesor drilled) in the main webs.LS blocks and cranks feature the thrust bearing located at the No. 3main, as compared to the rear-located early Chevy engines. Crankshaft rota-tion is clockwise. Note:While the Chevy service manual states that the damper bolt should not be reused, this is not be-cause the damper bolt is TTY; it’s not.Rather, damper bolt replacement is rec-ommended only because the underside of the bolt head features an OE friction-reducing contact surface that may be worn away on a damper bolt that has been installed and removed.All LS series blocks feature individ-ual main caps that are secured with six bolts—four primary (vertical) bolts plus two side bolts that enter through the outside of the block, above the pan rail.Because of this side-bolt design, which offers superior rigidity, main caps can-not be ground to reduce the bore size if align-boring is needed, as this wouldthrow the side bolts out of register. IfOE connecting rods in all LS engines (except LS7/LS9) are powdered met-al (PM) construction. While surpris-ingly strong for powde re d me tal, if you plan to build additional ponie s,and e spe cially if your plans include nitrous and/or turbo or supe r-charge r boost, trash the OE rods and buy some high-quality forge d ste e l rods. Whe ne ve r se rvicing cracked cap rods, the caps must be kept with their respective rods.the two-stage dry sump pump drive. You can adapt an LS7 or LS9 crank to other LS engines, but it’s not so easy when try-ing to use a short-snout crank for a dry sump drive, unless an aftermarket suppli-er offers a snout extension hub.Note that the LS crankshafts feature a toothed reluctor wheel (also called a tim-ing wheel or tone wheel), used for refer-encing crankshaft position. The crank-shaft position sensor is at the right rear side of the block, and the reluctor wheel is press-fit onto the rear of the crank.A Different Firing Order All LS series (Gen III/IV) engines feature a firing order of 1-8-7-2-6-5-4-3. This represents four cylinder swaps as com-pared to the “standard” (Gen I/II) small-block/big-block Chevy order of 1-8-4-3-6-5-7-2. Keep this in mind when connect-ing spark plug wires. The unique firing order was chosen to help smooth-out en-gine harmonics and, theoretically, provide a smoother power band.The firing order swap is accomplished via the camshaft (the layout of the lobes differs from older generation Chevy cams), so the change in firing order is not simply a matter of spark plug wire switch-ing. The LS uses a unique firing order camshaft, different from earlier genera-tion Chevy firing orders. Only an LS-style camshaft may be used in an LS engine. All OE threaded fasteners in the LS series of engines are metric. All OE cylin-der head bolts, main cap bolts and rod bolts require torque/angle tightening. OE cylinder head bolts are also considered TTY-style bolts and should not be reused. For any high-performance build, it’s highly recommended to use quality per-formance aftermarket bolts or studs, es-pecially for the main caps and the cylin-der heads. Some main cap bolts or studs, for example, don’t require the OE torque/angle tightening procedure, but allow torque-only tightening.All LS series engines feature roller-tip lifters, and all feature a .842-in. lifter body diameter. Instead of using dogbones or metal finger-trays to locate the roller lifters (to prevent lifter rotation in their bores), special LS-only composite plastic lifter trays are used. Each tray holds four lifters. The cylinder block features a large recessed area above each set of lifters to accept these trays. During assembly ordisassembly, the lifters and their tray canbe installed or removed as a set.Remember, any roller lifter must notbe allowed to rotate within the lifter bore,since the roller tip must remain in planewith the cam lobe. All roller lifter setupshave some method of keeping the liftersin register to prevent lifter body rotation.The LS engines simply use a different(plastic tray) retention approach. Flat sur-faces on the lifters align within flat-facepockets in the lifter trays. This flat-to-flatengagement serves to keep lifters inplane with the cam lobes.All OE LS pistons are hypereutecticcast type (alloy with high silica content),except for the LS9 piston, which is aforged aluminum piston (required tohandle the higher cylinder pressures as-sociated with supercharging/forced in-duction). Again, this refers only to origi-nal equipment; strong forged aluminumperformance pistons are readily availablefrom aftermarket performance pistonmakers for any LS application (JE, Dia-mond, Ross, Probe, CP, etc.).Be aware that when a reluctor wheel isin place, LS-type piston No. 8 requires anarrower profile at the pin bosses in or-der to clear the crankshaft reluctor wheel(used for picking up crankshaft timing).This is especially important if a strokercrank is being used. This is referred to asa side-relief or side-notch piston. Sincethe No. 8 piston requires this relief, alleight pistons must be of the same style inorder to accommodate piston weight bal-ance matching. Common piston height is.006 to .008 in. above the deck.All OE LS connecting rods are con-structed of forged powdered metal andfeature cracked caps, with the exceptionof LS7/LS9 rods, which are made offorged titanium for both strength and re-duced weight. Center-to-center length ofmost rods is 6.098 in., while the LS7 rodis 6.067 in. Also, only LS7 rods will workwith LS7-style pistons, due to the designof the piston’sinner bracing. Finally, theLS7 rod requires a unique rod bearing. If you’re building a real go-getter engine from scratch, and especially if you’re building a stroker, nix the OE rods and buy some forged steel rods from one of the performance aftermarket sources such as Scat, Oliver, Callies, Lunati, etc. Offering high strength and durability, quality aftermarket rods are available in a variety of lengths to accommodate a range of popular stroke combinations. While the standard small-block/big-block Chevy engines featured an offset connecting rod, the LS series features on-center connecting rods (pin bore in relation to big end bore). According to Katech, the OE powdered metal rods are surprisingly strong, while the primary weak point is the OE 9mm rod bolt. Changing to high-performance aftermar-ket rod bolts (such as those from ARP or A1) is recommended. At this point, there are plenty of aftermarket forged rods from which to choose, to provide much greater durability than the OE PM rods. The OE rod bolt is 9mm, but Katech and other rod makers offer a 10mm rod bolt to work with their connecting rods. If you plan to build a high-performance LS en-gine, an array of rods are available from aftermarket firms such as Lunati, Scat, Eagle, Crower, etc. These are forged rods that feature machined cap mating sur-faces. Only the OE rods feature pow-dered metal/cracked cap construction.The LS6 will safely overbore to thesame diameter as the LS1, but the LS6features a sturdier engine case and is abetter choice for overboring. The largerdisplacement LS2 is a less expensiveblock and features a superior blockcompared to either the LS1 or LS6,and offers much more interchangeabil-ity with LS6 parts.How large a displacement can youeasily obtain by increasing bore diame-ter and stroke? The LS1 or LS6 (origi-nally 345 cid) can be sized to a max of427 cid using a 4.000-in. stroke. TheLS2 (originally 364 cid) can be oversizedto 427 cid max as well.Why can’t you (or shouldn’t you) gofurther with an overbore? The problemlies with the very common sloppy place-ment of the LS aluminum block cylindersleeves. It’s common for the sleeves to beplaced slightly eccentric, likely due tocore shift during the block casting. If thesleeves were symmetric and located ex-actly where they’re supposed to be, youcould go further. However, to be safe, youshould consider a max overbore by about.030 to .032 in.; otherwise, you run therisk of thinning out the sleeves in certainspots, which can get pretty ugly. General-ly, stick to overboring by about .030 in. asyour maximum. Overboring is more safe-ly accomplished using an aftermarketblock, such as those offered by Dart,RHS and World Products. Actually, youcan order these blocks with your desiredrough-bore diameters already finished.Modifications intended to achievegreater strength and durability includechanging to aftermarket forged crank-shafts, forged connecting rods andforged/billet CNC pistons, billet maincaps, high-strength aftermarket connect-ing rod bolts, the use of head and mainstuds(in place of the original head andmain bolts) and oil pump modification,among other techniques. Oil pump modsinclude disassembly, deburring the pumpinside and out, porting the oil entrance,polishing the pressure relief section andreassembly.Cylinder HeadsAll heads are aluminum. All exhaust portsare standard LS. All rockers are bolt-downs, except for shaft-mount C5R andLSX CNC-machined bare heads.All LS family cylinder heads featurepowdered metal valve seats and pow-dered metal guides (this PM formulationprovides the lubricity of bronze and thelongevity of cast-iron guides). All LS1,LS6 and LS2 heads feature tall “cathe-dral”-style intake ports. LS7, L92 andLS3 heads have rectangular intake ports.All LS heads, with the exception of theLS7, feature as-cast chambers and ports.The LS7 heads feature CNC-machinedchambers, intake ports and exhaust ports.According to Katech, all cylinder headswithin the LS family are interchangeableamong blocks, with the exception of theLS7 heads. LS7 cylinder heads cannot bemounted to other LS blocks, as the widervalve layout would result in valves con-tacting the bores.Basically, we’re dealing with twoseparate cylinder head castings whenaddressing this later-generation of LSengines. The LS3, LS9 and L92 all useessentially the same cylinder headfoundation, featuring a four-digit iden-tification number (top of head justoutside the valve cover rail)—5364.The LS7 cylinder head is unique, withidentification number 8452.The LS3, LS9 and L92 head is an “as-cast” head, with intake and exhaust portsand combustion chambers shaped duringthe casting process. The LS7 cylinderAll Gen III/IV LS engines feature a front-mounted, crankshaft-driven gerotor-style oil pump that’s keyed to the crankshaft snout. This is one example of the improve-ments that GM designed into its LS engines. The oil pump is mounted after the tim-ing set is installed. This performance build happens to feature head studs.head features intake and exhaust ports and combustion chambers that are fin-ished by CNC machining.Distinguishing an LS7 head from an LS3, LS9 and L92 head is fairly easy. The LS3, LS9, L92 head features flat rocker pedestals (to accept separate rocker arm rails), and the ports and chambers feature a cast finish. The LS7 head has individual rocker arm radiused stands and all ports and chambers have a machined surface.In addition, the LS3, LS9 and L92heads feature the tapered beehive valve springs, while the LS7 head features straight valve springs.Unlike the LS1, LS6 and LS2 heads that feature the tall, skinny cathedral-style intake ports, the LS3, LS9, L92 and LS7heads feature a conventional rectangular shaped intake port style.Intake port dimensions also vary be-tween the two head versions. The intake ports on the head used for the LS3, LS9and L92 are 1.250 in. wide x 2.550 in. tall,while the intake ports on the LS7 head are 1.350 in. wide x 2.40 in. tall.Which LS heads will physically swap out to the various LS blocks? Basically,you need to pay attention to the block’s bore diameter. Running a cylinder head intended for a larger bore size can result in valves crashing into the block. For in-stance, you cannot install an LS3, LS9 or LS7 head on an LS1, LS6 or LS2 block (at least not without some creative deck/bore notching to clear the valves).Here’s the rundown summary: LS1and LS6 blocks will accept only LS1, LS6and LS2 heads; LS2 blocks can use LS1,LS6 or LS2 heads, as well as L92 style heads, which includes LS3 and LS9heads; LS3 and LS9 blocks can use LS1,LS6, LS2, LS3 or LS9 heads; LS7 blocks can accept any LS head.Be aware that while production LS1,LS6, LS2, LS3 and LS7 engine cylinder head bolts are 11mm in diameter, the LS9 block uses 12mm-diameter bolts.Valves and RockersA few early LS engines feature solid valve stems, while most feature hollow, sodi-um-filled exhaust stems. The LS7 uses ti-tanium intake valves and hollow sodium exhaust valves.As for rockers, the LS family of en-gines breaks down like this: the LS1, LS6and LS2 have a rocker arm ratio of 1.7:1,with intake and exhaust rockers identical;the L92, LS3, L99 and LS9 also have a 1.7:1 rocker arm ratio, but with the intake rockers offset; the LS7 has a 1.8:1 rocker arm ratio, with the intake rockers offset.T wo different rocker arm pedestal rail versions are used: One rail is designed for use on the LS1, LS6 and LS2. The otheris for the L92, LS3, L99 and LS9.The rail for the LS1, LS6 and LS2features the pedestals centered (height-wise) on the rail. Each edge of the rail’s length is straight. The rail for the L92,LS3, L99 and LS9 locates the pedestals a bit offset, with one side of each pedestal extended out.The rail for the LS1, LS6 and LS2 fea-tures each cylinder’s pair of pedestals lo-cated 1.901 in. on center. The rail for the L92, LS3, L99 and LS9 features the pedestal centers located 2.227 in. apart (center of hole to center of hole).LS7 cylinder heads feature individual radiused rocker stands and require no separate rocker arm mounting rail.All LS series rocker arms feature a 1.70:1 ratio and are semiroller type, fea-turing a trunion bearing at the rocker’s pivot point. Hardened rocker tips contact the valve stem tips (no roller bearings at the valve contact). Aftermarket full-roller rockers are readily available through the performance aftermarket.All LS rockers are interchangeable for intake and exhaust except LS7 rockers.LS7 rockers are unique, as the intake rocker features an offset, and the LS7rocker ratio is higher at 1.80:1, as op-posed to 1.70:1 for all other LS engines.All original equipment style LS series cylinder heads feature beehive-shape valve springs. All OE spring retainers are steel, even in the LS7. This single bee-hive spring design eliminates the need for dual springs, and allows the use of smaller and lighter retainers.Early LS engines featured composite-type cylinder head gaskets. Around 2002,GM switched to multilayer steel (MLS)cylinder head gaskets. All remaining gas-kets throughout the engines are formed elastic seal type gaskets that are reusable (depending on condition, of course).Regarding MLS gaskets, it’s very com-mon (on any engine, not just LS) when using MLS cylinder head gaskets that you may experience a slight external coolant weeping during the initial engine run.This is normal. The MLS gaskets feature a special heat-cured coating that will con-tinue to seal during the initial run. As long as the deck surfaces have been pre-pared properly and you’ve followed cor-rect assembly procedures, this minor leakage should disappear quickly.OEM Gen III/Gen IV cylinder heads feature tapered “beehive”-style valve springs and small-diameter spring retainers. Beehive valve springs take ad-vantage of the coil shape to minimize unwanted harmonics, eliminating the need for dual damper springs. However , some engine builders prefer to use traditional dual springs, especially where higher spring pressures are desired.。
MK35马达

紧凑型马达 -技术样本
TECHNICAL CATALOG
紧凑型马达 MK35
波克兰液压
使用方法: 本文件主要是针对那些使用波克兰液压产品的机器制造商。 它描述了波克兰液压产品的技术特性,同时还概要说明了尽可能保证产品较好地工作的安装方法。本文件包括有关安全的一些要点,并标识如下:
安全标识。 本文件还包括产品的重要操作指导和基本说明,并做如下标识:
kW [HP]
0 3 494 [213.1] 1747 [106.5] 5 555 [2 825] 110 [148]
1 3 822 [233.1] 1911 [116.6] 6 077 [3 090]
2 4 198 [256.0] 2099 [128.0] 6 675 [3 394]
2 099 [128.0]
14
S 123456
马达编号
特性
非对称内曲线滚道 对称内曲线滚道
cm³/tr [cu.in/rev.] cm³/tr [cu.in/rev.]
9 3 143 [191.7] 1572 [95.8] 0 3 494 [213.1] 1747 [106.5] 1 3 822 [233.1] 1911 [116.6] 2 4 198 [256.0] 2099 [128.0]
1
1 23
C
D
12 2 F
1234 P
1 2 3 4 56 S
旧标准
标准
主油口
变量油口
泄油口
制动器控制油口
R, L, A
Y
1, 2
X
ISO 6 162
ISO 6162
1
DIN 3 852
ISO 9 974-1