伺服机构的设计与实现(硬件)论文
伺服电机控制系统毕业论文设计
调速应用领域最初用得最多的是直流电机,随着交流调速技术特别是电力电子技术和控制技术的发展,交流变频技术获得了广泛应用,变频器和交流电动机迅速渗透到原来直流调速系统的绝大多数应用领域。近几年来,由于直流伺服电动机体积小、重量小和高效节能等一系列优点,中小功率的交流变频系统正逐步被直流伺服电动机系统所取代,特别是在纺织机械、印刷机械等原来应用变频系统较多的领域,而在一些直接由电池供电的直流电机应用领域,则更多的由直流伺服电动机所取代。
This article mainly discusses the designations of three-phase BLDCM velocity modulation system. The master controlled unit is BLDCM special-purpose control chip 80C196MC, assistanceswith the keyboard, the monitor, examines the electric circuit, the power electric circuit, actuates the electric circuit, the protection circuit and so on. The BLDCM with 3 Hall sensors establishing inside, to exam the position of the rotor and decide the phase change of electricalmachinery, the system calculates the rotational speed of the electrical machinery to realize the velocity-feedback control according to the Hall signal.
伺服驱动器硬件设计方案

伺服驱动器硬件设计方案伺服驱动器的硬件研发主要包括控制板和电源板的设计,控制板承担与上位机进行交互和实时生成精准的PWM信号。
电源板的作用根据PWM信号,利用调制的原理产生特定频率,特定相位和特定幅值的三相电流以驱动电机以达到最优控制。
一控制板研发1)控制板的架构主要的任务就是核心器件的选择。
安川、西门子等国际知名的公司都是采样ASIC的方式的芯片,这样就可以按照自己的设计需要来制造专用于伺服控制的芯片,由于采样ASIC方式,所以芯片的运行速度非常快,那么就比较容易实现电流环的快速响应,并且可以并行工作,那么也很容易实现多轴的一体化设计。
采样ASIC的方式有很多的好处,比如加密等。
但是采样ASIC的风险和前期的投入也是非常的巨大的,并且还要受该国的芯片设计和制造工艺的限制。
根据我国的实际的国情和国际的因素等多种原因,核心芯片比较适宜采样通用的DSP,ARM等处理器,比如Ti的C2000飞思卡尔的K60,英飞凌的XE164等。
研究台达的伺服驱动器发现其架构是采用Ti的DSP 2812+CPLD,这和我们公司GSK的方案基本一样。
我们也是采用DSP2812加CPLD(EPM570T144)来实现核心的控制功能。
2)核心器件的控制功能的分工。
DSP实现位置环、速度环、电流环的控制以及利用事件管理器PWM接口实现产生特定的PWM信号。
可以利用其灵活的编程特性快速的运算能力实现特定的控制算法等,还可以利用其自身的A/D完成对电机电流的转换,但是DSP自身的A/D精度普遍较低,并且还受基准电压电源的纹波PCB的LAYOUT模数混合电路的处理技巧影响,所以高档的伺服几乎都采用了外部A/D来完成电流采样的处理。
比如路斯特安川等。
也有一些高档的伺服使用一些特殊的电流传感器,该传感器的输出已经是数字信号,这样就可以节省了外部A/D芯片和增强抗干扰能力。
如西门子的变频器采用ACPL7860,发那克用于机器人的六驱一体的伺服也是采用了ACPL7860,西门子的伺服S120采用了Ti的芯片AMC1203。
伺服运动控制器的研制设计论文_学位论文

摘要随着科学技术的进步,传统的运动控制系统由于本身的特性限制难以满足现代工业的要求,研究和开发具有开放式结构的高性能运动控制器已成为当前运动控制领域的重要发展方向。
本论文以永磁交流同步伺服电动机为核心,对运动控制器的硬件结构进行了全面的改进,实现了运动控制单元和外围处理单元,研制了一种用常规芯片系列组成的运动控制器,提出了采用单稳态多谐振荡器和数据选择器的四倍频辨向电路。
该系统硬件结构是基于普通PC机或工控机的ISA总线而开发,其功能集12位DAC转换、定时中断、脉冲接收、倍频辨向计数、零点检测及使能报警等于一体。
该系统的软件结构通过对系统CMOS/实时时钟(RTC)编程实现高精度定时硬件中断,对系统CMOS/实时时钟(RTC)编程实现高精度定时,在中断程序中加入PID控制算法,可以满足高精度的伺服电机位置控制的要求。
关键字:伺服系统实时钟 PID控制ABSTRACTWith the progress of the technology, it is diffcult for the traditional Motion ControlSystem to satisfy the demands of the modern industry. Currently, it has been an important trendin the motion control field to develop the high-capability Motion Controller with the openstructure.Motion controller composed of general chip series is developed and Quadruple differential Circuit utilizing dual monostable multivibra-tors with Sehmitt trigger inputs and dual 4_line to 1_line data selectors or multiplexers is put forward.Hardware framework of the system is basedon ISA buses of general PC or IPC,including 12_bit multiplying D/A conversion,time interruptpulse receiving,zero check and on-off and warning circuit.Software framework is put forward based on the technical programming the CMOS/Real Timer Clock,adopting VtoolsD to programme VxD and real-time position control of servo electromotor is realized.So the key problem of developing NC in the Windows is solved.And,PID controller is designed,PID control arithmetic is programmed,parameters of control system are adjusted online,experiment is researched and the result is analyzed.Experimental result showed that programming CMOS/RTC,realizing high precision time through program VxD along with PID arithmetic in the interrupt can meet the requjre of high preci sion position control of servo electromotor.The paper firstly introduces the origin, research significance, related technical status and main contents of the task, and describes the system as a whole in detail, then discusses the hardware design, software design, and the algorithms design respectively. Finally, The paper brings forward the main contents of advanced research.Keyword:毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
伺服方案范文

伺服方案概述伺服方案是一种用于控制和驱动机械系统的高性能驱动方案。
通过使用伺服电机和相应的控制器,伺服方案能够实现高准确度、高控制精度和高动态响应的运动控制。
伺服方案广泛应用于各种需要精密控制的领域,如机器人、自动化生产线、医疗设备、纺织机械等。
本文将介绍伺服方案的基本原理、组成部分以及应用场景。
原理伺服方案的基本原理是通过控制器对伺服电机的电流进行精确控制,以实现精密的运动控制。
控制器根据输入的控制信号,计算出电机应该输出的电流,然后将输出的电流送给电机,从而控制电机的转动。
在伺服方案中,通常使用PID控制算法来实现电机转动的精确控制。
PID控制算法根据电机的实际转动情况和期望的转动情况,计算出一个误差值,然后根据误差值调整控制信号,使得误差最小化。
通过不断地调整控制信号,伺服方案可以实现对电机位置、速度和加速度的精确控制。
组成部分伺服方案一般由电机、驱动器和控制器三部分组成。
电机伺服电机是伺服方案的核心组成部分,它能够将电能转化为机械能,驱动机械系统的运动。
伺服电机通常具有高转矩密度、高速度响应和高转动精度的特点,能够满足对高性能运动控制的需求。
常见的伺服电机包括直流伺服电机、交流伺服电机和步进伺服电机等。
不同类型的伺服电机适用于不同的应用场景,选择合适的伺服电机能够提高伺服方案的性能和效果。
驱动器驱动器是伺服方案中负责控制电机的转动的组件。
驱动器接收来自控制器的命令信号,通过对电流进行精确控制,驱动电机按照预期的方式运动。
驱动器通常具有高压输入和低压输出的特点,能够提供足够的电流和电压给电机。
此外,驱动器还能够监测电机的状态和保护电机免受过载、过热等不良情况的影响。
控制器控制器是伺服方案中负责产生控制信号的组件。
控制器接收外部的参考信号和反馈信号,通过计算误差值并调整控制信号,将期望的运动要求传递给驱动器和电机。
控制器一般采用先进的数字信号处理技术,能够实现高精度的运动控制和实时监测。
控制器还可以接入上位机或者其他外部设备,实现远程控制和监控。
伺服驱动器硬件设计
伺服驱动器的硬件设计永磁同步电机伺服驱动器的硬件由控制部分和功率部分组成,控制电路以ARM为控制核心,包括编码器接口电路、外围接口电路等等。
控制电路实现以下功能:获得相关指令信号和反馈信号,运行矢量控制算法,生成用于控功率模块的PWM信号。
功率电路包括整流电路、逆变电路、能耗制动电路、电流采样电路、功率模块及其驱动电路、辅助电源等,用以实现能量的交流-直流-交流形式变换,驱动电机实现对电机力矩、速度、位置的精确控制。
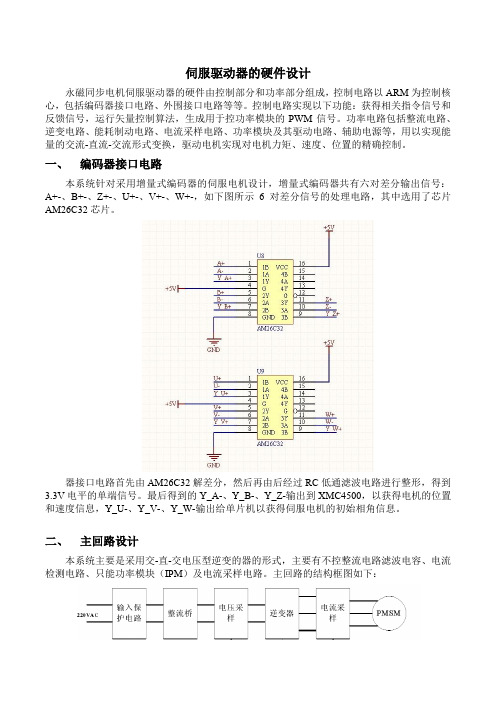
一、编码器接口电路本系统针对采用增量式编码器的伺服电机设计,增量式编码器共有六对差分输出信号:A+-、B+-、Z+-、U+-、V+-、W+-,如下图所示6对差分信号的处理电路,其中选用了芯片AM26C32芯片。
器接口电路首先由AM26C32解差分,然后再由后经过RC低通滤波电路进行整形,得到3.3V电平的单端信号。
最后得到的Y_A-、Y_B-、Y_Z-输出到XMC4500,以获得电机的位置和速度信息,Y_U-、Y_V-、Y_W-输出给单片机以获得伺服电机的初始相角信息。
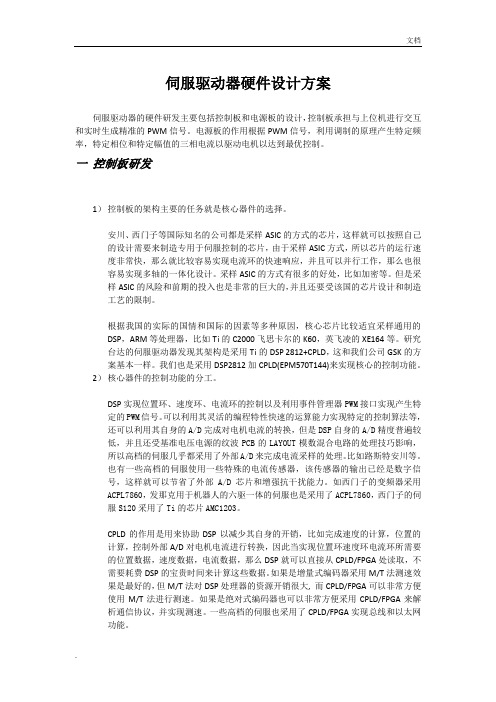
二、主回路设计本系统主要是采用交-直-交电压型逆变的器的形式,主要有不控整流电路滤波电容、电流检测电路、只能功率模块(IPM)及电流采样电路。
主回路的结构框图如下:(一)整流电路设计本系统采用的是电容滤波的单相不可控整流电路,这部分电路由输入保护电路、整流桥如下图所示:主回路侧有220V交流进来先接一个2A断路器,以防止过电流,起到保护作用。
然后安规电容增加3个安全电容来抑制EMI传导干扰。
交流电源输入分为3个端子:火线(L)/零线(N)/地线(G)。
在火线和地线之间以及在零线和地线之间并接的电容,一般统称为Y电容。
这两个Y电容连接的位置比较关键,必须需要符合相关安全标准,以防引起电子设备漏电或机壳带电,容易危及人身安全及生命。
它们都属于安全电容,从而要求电容值不能偏大,而耐压必须较高,Y电容的取值为4700PF。
在火线和零线抑制之间并联的电容,一般称之为X 电容。
《基于dsPIC30F4011的无刷直流电机伺服驱动器设计》范文

《基于dsPIC30F4011的无刷直流电机伺服驱动器设计》篇一一、引言随着现代工业自动化和智能化的发展,无刷直流电机伺服驱动器作为执行器的重要一环,在各类精密机械设备中得到了广泛的应用。
为了实现更高的控制精度和效率,采用高性能的微控制器(如dsPIC30F4011)成为一种必要选择。
本文将探讨基于dsPIC30F4011的无刷直流电机伺服驱动器的设计,并从系统设计、硬件实现和软件编程三个方面进行详细介绍。
二、系统设计在系统设计阶段,首先要确定无刷直流电机伺服驱动器的整体架构。
本设计采用以dsPIC30F4011为主控芯片的硬件架构,结合无刷直流电机的控制原理和特点,实现高效、精确的电机控制。
在硬件架构上,dsPIC30F4011微控制器负责接收上位机指令、处理电机控制算法、输出PWM信号等任务。
同时,系统还包括电源模块、电机驱动模块、传感器模块等部分,共同构成完整的伺服驱动器系统。
三、硬件实现1. 电源模块:电源模块为整个系统提供稳定的电源。
本设计采用开关电源和线性电源相结合的方式,以满足不同模块的电压需求。
2. 电机驱动模块:电机驱动模块是实现无刷直流电机运动的关键部分。
本设计采用三相全桥驱动电路,通过PWM信号控制电机的运动。
同时,为提高电机的性能和保护电机的安全,该模块还包括电流、电压和温度等检测电路。
3. 传感器模块:传感器模块用于实时检测电机的位置、速度和负载等信息,为控制算法提供数据支持。
本设计采用高精度的光电编码器和力矩传感器等设备,确保系统具有较高的动态响应和稳定性。
四、软件编程在软件编程方面,本设计采用C语言进行编程,以充分利用dsPIC30F4011微控制器的强大处理能力。
软件程序主要包括初始化程序、主程序和控制算法程序等部分。
初始化程序负责配置dsPIC30F4011的时钟、IO口、PWM等参数,为主程序和控制算法程序提供良好的运行环境。
主程序负责接收上位机指令、处理系统状态信息等任务,确保系统的正常运行。
伺服驱动器硬件设计方案
伺服驱动器硬件设计方案伺服驱动器的硬件研发主要包括控制板和电源板的设计,控制板承担与上位机进行交互和实时生成精准的PWM信号。
电源板的作用根据PWM信号,利用调制的原理产生特定频率,特定相位和特定幅值的三相电流以驱动电机以达到最优控制。
一控制板研发1)控制板的架构主要的任务就是核心器件的选择。
安川、西门子等国际知名的公司都是采样ASIC的方式的芯片,这样就可以按照自己的设计需要来制造专用于伺服控制的芯片,由于采样ASIC方式,所以芯片的运行速度非常快,那么就比较容易实现电流环的快速响应,并且可以并行工作,那么也很容易实现多轴的一体化设计。
采样ASIC的方式有很多的好处,比如加密等。
但是采样ASIC的风险和前期的投入也是非常的巨大的,并且还要受该国的芯片设计和制造工艺的限制。
根据我国的实际的国情和国际的因素等多种原因,核心芯片比较适宜采样通用的DSP,ARM等处理器,比如Ti的C2000飞思卡尔的K60,英飞凌的XE164等。
研究台达的伺服驱动器发现其架构是采用Ti的DSP 2812+CPLD,这和我们公司GSK的方案基本一样。
我们也是采用DSP2812加CPLD(EPM570T144)来实现核心的控制功能。
2)核心器件的控制功能的分工。
DSP实现位置环、速度环、电流环的控制以及利用事件管理器PWM接口实现产生特定的PWM信号。
可以利用其灵活的编程特性快速的运算能力实现特定的控制算法等,还可以利用其自身的A/D完成对电机电流的转换,但是DSP自身的A/D精度普遍较低,并且还受基准电压电源的纹波PCB的LAYOUT模数混合电路的处理技巧影响,所以高档的伺服几乎都采用了外部A/D来完成电流采样的处理。
比如路斯特安川等。
也有一些高档的伺服使用一些特殊的电流传感器,该传感器的输出已经是数字信号,这样就可以节省了外部A/D芯片和增强抗干扰能力。
如西门子的变频器采用ACPL7860,发那克用于机器人的六驱一体的伺服也是采用了ACPL7860,西门子的伺服S120采用了Ti的芯片AMC1203。
毕业设计论文完结版(伺服电机)

南京工程学院自动化学院本科毕业设计(论文)题目:SVPWM 在BLDC电机中的应用专业:自动化(数控技术)班级:XXXXX学号:XXXXXX学生姓名: XXXX指导教师: XXX 讲师起迄日期:2012.2~2012.6设计地点:实验楼 _Graduation Design (Thesis) SVPWM in The Application of BLDC MotorByZHU XiangSupervised byTENG Fu LinSchool of AutomationNanjing Institute of TechnologyJune, 2012摘要随着工业自动化的发展,人们对电机控制系统的性能要求越来越高。
矢量控制、直接转矩控制等先进的控制理论不断提出,而微处理器和控制器的更新换代特别是数字信号处理(DSP)的出现,使得理论成为实践。
智能化功率模块和空间矢量脉宽调制(SVPWM)技术的出现,极大的改善了电机的控制性能。
本论文重点讲述了以功能强大的DSP、智能化的功率模块和先进的SVPWM技术实现永磁无刷直流电机的开环调速。
介绍了基于DSP的硬件控制平台的组成部分。
重点分析了SVPWM技术原理、产生PWM波的控制算法和程序的实现,最后在DSP 控制平台上对其控制性能进行了验证。
本论文所有的硬件电路设计和程序编写基于TMS320F2806建立的数字控制系统。
硬件电路中的电源电路,单片DSP最小系统电路等主要部分都是经过实际的焊制和调试。
软件设计中的SVPWM程序主要采用C语言套用格式,使用CCS(C2000)编译环境下在DSP控制平台上进行了实际调试和验证。
关键词:数字信号处理器;空间矢量PWM;逆变器ABSTRACTAlong with the development of industrial automation, people on the motor control system performance demand more and more. Vector control, direct torque control and other advanced control theories have been put forward, and the microprocessor controller and the update especially digital signal processor (DSP) appear, makes theory into practice. Intelligent power module and space vector pulse width modulation (SVPWM) technology appear, greatly improved the motor control performance.This paper focuses on the function of the powerful DSP, intelligent power module and advanced SVPWM technology to achieve permanent brushless dc motor of the open loop control. Introduces the hardware platform based on DSP control of the component. Analyses the SVPWM technology principle, produce PWM waves of the control algorithm and the realization of the program, and the last in the DSP control platform on the control performance is validated.This paper all the hardware circuit design and programming TMS320F2806 based on a digital control system. Hardware circuit of the power supply circuit, monolithic DSP minimum system such as the main part of the circuit is after the actual soldering and debugging. The software design of SVPWM procedure mainly using C language to format, using CCS (C2000) compiled environment in DSP control platform on the actual commissioning and validation.Key words:DSP;Space vector PWM;inverter目录第一章绪论 (1)1.1 引言 (1)1.2 选题背景 (1)1.3 课题研究意义 (2)1.4 研究内容 (2)1.5 本文的结构 (2)第二章SVPWM的生成原理 (4)2.1 24V直流无刷电机调速控制 (4)2.2 几种PWM输出方法的比较 (4)2.3 SVPWM生成原理 (4)第三章SVPWM算法的实现 (7)3.1 扇区的判断 (7)3.2 相邻两矢量的开关作用时间 (7)3.3 切换顺序 (9)3.4 SVPWM的调速 (10)3.5 SVPWM波的死区控制 (10)第四章支持SVPWM发生器的硬件电路 (11)4.1 DSP微处理器 (11)4.2 DSP基本外围电路的设计 (12)4.3功率驱动电路 (14)4.4 SVPWM产生的硬件基础 (16)第五章SVPWM的软件设计 (18)5.1定点DSP的Q格式 (18)5.2 SVPWM控制参数的Q格式及代码实现 (19)5.3 SVPWM程序流程图 (20)5.4 实验结果分析 (21)第六章结论 (23)致谢 (24)参考文献 (25)附录A:硬件设计原理图 (26)第一章绪论1.1 引言SVPWM(Space Vector Pulse Width Modulation),即电压空间矢量脉宽调制,SVPWM是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近于理想的正弦波形。
伺服电机毕业论文
伺服电机毕业论文伺服电机毕业论文伺服电机作为一种重要的电动机,具有广泛的应用领域和潜力。
它在工业自动化、机器人技术、航空航天等领域中发挥着重要的作用。
本文将从伺服电机的原理、特点以及应用领域等方面进行探讨,旨在为读者提供一些有关伺服电机的基本知识和理解。
一、伺服电机的原理伺服电机是一种能够根据输入信号控制输出转矩或速度的电动机。
其工作原理基于反馈控制系统,通过传感器获取电机的实际转速或位置信息,然后将其与期望值进行比较,并通过控制器对电机进行调节,使其输出与期望值一致。
这种闭环控制系统可以实现精确的位置和速度控制,提高电机的响应速度和稳定性。
二、伺服电机的特点1. 高精度:伺服电机具有较高的转矩控制精度和位置控制精度,能够实现精确的位置和速度控制,满足高精度要求的应用场景。
2. 高响应速度:伺服电机具有快速的响应特性,能够在短时间内达到设定的转速或位置,适用于需要快速响应的应用场景。
3. 广泛的调速范围:伺服电机的转速范围较宽,可以根据需要进行调速,适用于不同转速要求的场合。
4. 良好的负载适应性:伺服电机具有较好的负载适应性,能够在负载变化时自动调整输出转矩,保持稳定的运行状态。
5. 高效能:伺服电机具有较高的效率,能够将输入的电能转化为机械能的效率较高,减少能源的浪费。
三、伺服电机的应用领域1. 工业自动化:伺服电机广泛应用于工业自动化领域,如数控机床、包装机械、印刷设备等。
其高精度、高响应速度和良好的负载适应性能够满足工业自动化对于位置和速度控制的要求。
2. 机器人技术:伺服电机是机器人技术中不可或缺的关键部件,用于控制机器人的运动和姿态。
其高精度和高响应速度能够实现精确的运动控制,提高机器人的灵活性和准确性。
3. 航空航天:伺服电机在航空航天领域中也有重要的应用,如飞行控制系统、导航系统等。
其高精度和高可靠性能够满足航空航天对于飞行姿态和导航精度的要求。
4. 医疗设备:伺服电机在医疗设备中的应用也逐渐增多,如手术机器人、医疗影像设备等。
伺服驱动系统设计方案及对策

伺服驱动系统设计方案及对策一、硬件设计方案及对策:1.选用高性能的伺服电机和驱动器:根据具体需要选择适合的伺服电机和驱动器,确保其具备足够的功率和控制精度。
在选择过程中,需要对驱动器的技术参数进行充分了解,并评估其适用性和可靠性。
2.采用合适的编码器:编码器用于测量电机的位置和速度,对伺服驱动系统的控制精度至关重要。
选择合适的编码器,能够提供高分辨率和高精度的反馈数据,并且具备良好的抗干扰性能。
3.电源设计:伺服驱动系统对电源质量和稳定性要求较高,需要提供稳定的电源供应和电磁兼容性设计,避免电源波动对系统性能的影响。
4.散热设计:伺服电机和驱动器在运行时会产生较大的热量,必须进行有效的散热设计,以确保系统的稳定性和可靠性。
可采用风扇散热、散热片等方式来降低温度。
5.机械设计:在伺服驱动系统中,机械结构的设计对系统性能有很大影响。
需要针对具体应用场景选择合适的传动方式和结构设计,考虑到负载、速度、精度等因素。
6.停电保护设计:为了避免突发停电导致系统损坏,可以设计备用电池或超级电容器等储能装置,以保证在停电短时间内继续工作并正常停机。
二、软件设计方案及对策:1.控制算法设计:通过对伺服电机的位置、速度和加速度等参数进行精细控制,实现对运动轨迹的准确控制。
设计合理的控制算法,能够提高系统的控制精度和稳定性。
2.运动控制软件设计:根据伺服驱动系统的应用需求,设计合理的运动控制软件,包括运动插补算法、软件调速、位置校正等功能。
3.通信接口设计:伺服驱动系统通常需要与上位机或其他设备进行通信,需要设计合适的通信接口,以实现数据传输和控制。
4.用户界面设计:为了方便用户操作和监测系统运行状态,可以设计友好的用户界面,包括参数设置、故障诊断、实时监控等功能。
5.系统诊断与故障检测设计:通过设计合理的系统诊断和故障检测功能,可以检测和排除系统故障,提高系统的可靠性和稳定性。
三、通信网络设计方案及对策:1.选择适当的通信协议:根据伺服驱动系统所处的应用环境和通信要求,选择适当的通信协议,如CAN总线、以太网等。
《基于dsPIC30F4011的无刷直流电机伺服驱动器设计》范文
《基于dsPIC30F4011的无刷直流电机伺服驱动器设计》篇一一、引言随着现代工业的快速发展,无刷直流电机(BLDCM)因其高效、低噪音、长寿命等优点,在各种自动化设备中得到了广泛应用。
为了更好地控制无刷直流电机,设计一款高性能的伺服驱动器显得尤为重要。
本文将详细介绍基于dsPIC30F4011的无刷直流电机伺服驱动器设计,从硬件设计、软件控制算法以及系统测试等方面进行全面分析。
二、硬件设计2.1 核心控制器本设计选用dsPIC30F4011作为核心控制器。
dsPIC30F4011是一款高性能的数字信号控制器,具有强大的运算能力和丰富的接口资源,适用于无刷直流电机的控制。
2.2 功率驱动电路功率驱动电路是无刷直流电机伺服驱动器的关键部分。
本设计采用H桥电路作为功率驱动电路,通过控制H桥的通断,实现电机的正反转和调速。
同时,为了保护电机和驱动器,还设计了过流、过压、欠压等保护电路。
2.3 传感器接口为了实现电机的精确控制,本设计还包含了传感器接口电路。
通过采集电机的位置、速度等信息,实现电机的闭环控制。
三、软件控制算法3.1 算法选择与优化为了实现电机的平稳启动、精确调速和快速响应,本设计采用了空间矢量脉宽调制(SVPWM)算法。
通过优化SVPWM算法,提高电机的运行效率和降低噪音。
3.2 电机控制策略本设计采用无传感器控制策略,通过捕获电机的反电动势过零点来判断电机的位置和速度。
同时,结合PID控制算法,实现电机的精确控制。
四、系统测试与分析4.1 测试环境与条件在完成硬件设计和软件编程后,我们对无刷直流电机伺服驱动器进行了系统测试。
测试环境为室内恒温环境,测试条件包括不同负载、不同速度等。
4.2 测试结果与分析经过测试,本设计的无刷直流电机伺服驱动器在各种工况下均表现出良好的性能。
在启动阶段,电机能够平稳启动,无抖动现象;在调速过程中,电机能够快速响应,实现精确调速;在长时间运行过程中,电机表现出较低的噪音和较高的运行效率。
《面向数控的伺服控制器的设计与实现》

《面向数控的伺服控制器的设计与实现》面向数控的伺服控制器设计与实现一、引言随着制造业的快速发展,数控技术已经成为现代制造业不可或缺的一部分。
伺服控制器作为数控系统的核心组成部分,其性能直接影响到数控设备的加工精度和效率。
因此,设计并实现一款高性能的面向数控的伺服控制器显得尤为重要。
本文将详细介绍伺服控制器的设计思路、实现方法及实验结果。
二、设计思路1. 总体设计伺服控制器的设计需考虑到实时性、稳定性和精度等多方面因素。
总体设计采用模块化思想,将伺服控制器分为控制单元、驱动单元、反馈单元等模块。
控制单元负责接收上位机指令,解析并生成控制信号;驱动单元根据控制信号驱动电机运动;反馈单元则将电机的实际位置信息反馈给控制单元,形成闭环控制。
2. 控制策略设计伺服控制器的核心是控制策略。
本文采用先进的PID(比例-积分-微分)控制算法,通过调整PID参数,实现对电机的高精度控制。
此外,为提高系统的动态性能和稳定性,还采用了前馈控制和扰动观测器等控制策略。
3. 硬件设计硬件设计是伺服控制器实现的基础。
根据实际需求,选用合适的微处理器、功率驱动器件、传感器等元器件,并合理布局电路,确保系统的稳定性和可靠性。
4. 软件设计软件设计是实现伺服控制器功能的关键。
采用C语言或汇编语言编写控制程序,实现控制算法、通信协议等功能。
同时,为方便用户使用,还需开发上位机软件,实现参数设置、状态监测等功能。
三、实现方法1. 硬件实现根据硬件设计图纸,制作伺服控制器的电路板,并将元器件焊接到电路板上。
为确保系统的稳定性和可靠性,需对电路板进行严格的质量检测。
2. 软件实现在微处理器上编写控制程序,实现控制算法、通信协议等功能。
同时,开发上位机软件,方便用户进行参数设置和状态监测。
在软件实现过程中,需注意程序的实时性和稳定性,确保系统能够快速响应上位机的指令。
3. 系统调试与测试完成硬件和软件实现后,需对系统进行调试和测试。
首先,对电路板进行电源测试、信号完整性测试等;其次,对控制程序进行功能测试、性能测试等;最后,对整个系统进行联调测试,确保系统能够正常工作并达到预期性能指标。
伺服驱动器硬件设计方案

伺服驱动器硬件设计方案伺服驱动器得硬件研发主要包括控制板与电源板得设计,控制板承担与上位机进行交互与实时生成精准得PWM信号。
电源板得作用根据PWM信号,利用调制得原理产生特定频率,特定相位与特定幅值得三相电流以驱动电机以达到最优控制。
一控制板研发1)控制板得架构主要得任务就就是核心器件得选择。
安川、西门子等国际知名得公司都就是采样ASIC得方式得芯片,这样就可以按照自己得设计需要来制造专用于伺服控制得芯片,由于采样ASIC方式,所以芯片得运行速度非常快,那么就比较容易实现电流环得快速响应,并且可以并行工作,那么也很容易实现多轴得一体化设计。
采样ASIC得方式有很多得好处,比如加密等。
但就是采样ASIC得风险与前期得投入也就是非常得巨大得,并且还要受该国得芯片设计与制造工艺得限制.根据我国得实际得国情与国际得因素等多种原因,核心芯片比较适宜采样通用得DSP,ARM等处理器,比如Ti得C2000飞思卡尔得K60,英飞凌得XE164等。
研究台达得伺服驱动器发现其架构就是采用Ti得DSP 2812+CPLD,这与我们公司GSK得方案基本一样。
我们也就是采用DSP2812加CPLD(EPM570T144)来实现核心得控制功能。
2)核心器件得控制功能得分工.DSP实现位置环、速度环、电流环得控制以及利用事件管理器PWM接口实现产生特定得PWM信号。
可以利用其灵活得编程特性快速得运算能力实现特定得控制算法等,还可以利用其自身得A/D完成对电机电流得转换,但就是DSP自身得A/D精度普遍较低,并且还受基准电压电源得纹波PCB得LAYOUT模数混合电路得处理技巧影响,所以高档得伺服几乎都采用了外部A/D来完成电流采样得处理。
比如路斯特安川等.也有一些高档得伺服使用一些特殊得电流传感器,该传感器得输出已经就是数字信号,这样就可以节省了外部A/D芯片与增强抗干扰能力。
如西门子得变频器采用ACPL7860,发那克用于机器人得六驱一体得伺服也就是采用了ACPL7860,西门子得伺服S120采用了Ti得芯片AMC1203。
伺服控制系统的设计与应用
伺服控制系统的设计与应用伺服控制系统是一种能够对物理系统进行精确控制的系统,其应用范围非常广泛,从机械制造到航空航天,再到医疗设备等领域都有其身影。
本文将探讨伺服控制系统的设计与应用。
一、伺服控制系统的组成与原理伺服控制系统由三部分组成:传感器、控制器和执行机构。
其基本原理是反馈控制,即根据传感器测得的系统输出量与期望输出量之间的误差来实现对执行机构的控制。
控制器会通过对误差进行处理,输出适当的控制信号,控制执行机构的工作状态,使其不断逼近期望输出量。
因此,伺服控制系统能够对系统运动进行精确的控制。
二、伺服控制系统在机械制造中的应用在机械制造中,伺服控制系统的应用非常广泛。
比如在机床加工中,伺服控制系统可用于对工件进行精确定位和加工;在液压系统中,伺服控制系统可用于精确控制压力和流量;在自动化装配线中,伺服控制系统可用于实现精确的零件定位和装配。
三、伺服控制系统在机器人中的应用在机器人领域,伺服控制系统也是必不可少的一部分。
机器人需要通过伺服控制实现精确定位和动作的执行,从而完成各种各样的任务。
在机器人的关节处安装伺服电机,利用其精确的位置反馈信号,轻松实现机器人的各种动作。
四、伺服控制系统在医疗设备中的应用伺服控制系统还被广泛应用于医疗设备中,比如手术机器人等。
手术机器人需要操作极为精确,但医生手部的细微变化可能影响手术结果。
因此,伺服控制系统可以帮助手术机器人实现精确的移动和定位,从而减小手术操作的风险。
五、伺服控制系统的设计与优化伺服控制系统的设计需要考虑很多因素,如控制器的选型、传感器的选择和执行机构的设计等。
此外,要注意传感器信号的采集和处理,以及控制信号的输出类型和稳定性等问题。
同时,还需要针对具体的应用场景进行优化和调整,以达到最佳的控制效果。
总之,伺服控制系统是现代工业制造和科技发展的重要一环,其应用广泛,涉及面非常广,而其设计与优化也是非常重要的一环,必须充分考虑各种因素和应用场景,才能发挥出其最大的效益。
工业机器人交流伺服驱动控制系统硬件的设计
工业机器人交流伺服驱动控制系统硬件的设计由E讯网提供摘要:从二十世纪七十年代起至今,我国的工业机器人数量已经比较庞大,在机器人的某些技术方面也达到了世界先进水平,但总体来说,西方发达国家的工业机器人技术仍领先我国很多年。
究其原因不难发现:我国研究工业机器人采取的方法主要是首先引进外国的先进技术,然后再对其进行二次开发,这就造成了我国自身创新技术比较少,严重制约了我国工业机器人产业化的发展。
关键字:交流伺服驱动系统;DSP为打破国外对我国工业机器人的技术垄断,我们必须自力更生,掌握高性能工业机器人的关键技术,并在原来的基础上有所创新。
由于工业机器人关节的执行器为电机,所以获得电机的良好控制效果是非常重要的,要想获得优良的电机控制性能,就需要高性能的交流伺服驱动系统,因此研制高性能的交流伺服驱动系统是工业机器人的关键技术之一。
交流伺服驱动系统的硬件是软件设计的基础,所以本文的主要任务是根据工业机器人伺服驱动系统的特点,对系统的的硬件进行设计。
1、硬件设计1.1DSP的选型DSP系统硬件设计包括控制芯片的选择、主电路的驱动与保护、外围设备、逻辑电路等,它是整个控制系统设计的基础,DSP芯片又是重中之重。
TMS320C5000系列DSP具有最低功耗的特点,是专门针对消费类数字市场而设计的,最低耗电只有0.33mA/MHz,所以多应用于日常生活中的消费产品,如照相机、手机等。
TI公司的TMS320C6000系列拥有最高的处理能力,是一种适合采用C++/C等高级语言进行编程的数字处理器,主要应用在军事国防等高端领域。
与C5000和C6000系列的DSP相比,TMS320C2000系列的DSP由于其具有速度快、精度高、集成度高等优点,是目前控制领域性能最高的处理器。
其中,C28系列DSP是TMS320C2000平台中的新成员,它由C24系列DSP改进而来,是一款支持C/C++语言设计的芯片,C28系列DSP非常适合于工业控制,在算法控制上有独到的优势,是一款不可多得的微处理器,它的高效性可以使它代替任何其他处理器。
伺服系统论文

伺服系统论文引言伺服系统作为工业自动化的重要组成部分,在现代生产中扮演着至关重要的角色。
伺服系统通过控制电机的运动来实现对机械装置的精确驱动和定位。
本文将从伺服系统的基本原理、应用领域以及未来发展方向等方面进行阐述。
一、伺服系统基本原理伺服系统由电机、编码器、控制器等组成。
电机作为动力源,通过控制器接收信号并通过编码器反馈实时位置信息,以实现对电机的精确控制和位置反馈。
伺服系统的基本原理是通过反馈控制的闭环系统,将设定值和反馈值进行比较,利用控制算法计算出控制信号,调节电机的运动,使得实际位置尽量接近设定位置。
控制信号通过控制器输出到驱动电路,控制电机的转速和位置,实现精确驱动和定位。
二、伺服系统的应用领域伺服系统广泛应用于工业自动化领域,以下是几个典型的应用领域:1. 机床伺服系统在机床上的应用非常广泛。
通过控制电机的转速和位置,伺服系统可以实现高精度的切削和加工,提高机床的加工质量和效率。
2. 机器人机器人是伺服系统的重要应用之一。
通过控制机器人的关节和末端执行器,伺服系统能够实现精确的运动和灵活的操作,广泛应用于工业自动化、医疗、服务机器人等领域。
3. 飞行器在无人飞行器和航空航天领域,伺服系统也扮演着重要角色。
通过控制电机的转速和位置,伺服系统能够实现飞行器的精确姿态控制和飞行轨迹规划,提高飞行器的稳定性和安全性。
三、伺服系统的未来发展方向随着科技的不断进步和行业的发展,伺服系统也面临着新的挑战和发展方向。
1. 高性能控制算法伺服系统的性能主要依赖于控制算法的优化。
未来的发展方向是研究和设计更加高效、高精度的控制算法,提高伺服系统的响应速度和定位精度,以适应更加复杂和高要求的应用场景。
2. 多轴联动控制随着机械装置的复杂化和工艺的发展,多轴联动控制将成为伺服系统的趋势。
通过多轴联动控制,实现多个电机的协同工作,提高工作效率和生产能力。
3. 无线通信与网络化未来的伺服系统将更加注重无线通信和网络化的应用。
伺服控制系统的优化设计和实现

伺服控制系统的优化设计和实现伺服控制系统是机械电子控制领域中非常重要的一种系统,它主要用于精密控制,如机械手臂、飞控系统、机车和机器人等方面的应用。
伺服控制系统的作用是实现对某种流量、力量、角度或位移等精密控制的实现。
本文将围绕着伺服控制系统的优化设计和实现,探讨其基本原理、优化方法及实现方案。
一、伺服控制系统的基本原理伺服控制系统是一种反馈控制系统,其基本结构如下图所示:其中,信号源发出期望信号S目,信号经过比较后,误差信号E输出给控制器,控制器对误差进行相应处理,然后将处理后的信号发送到执行机构,执行机构将机械运动转换为电信号,反馈给比较器,形成闭环控制。
伺服控制系统的关键在于:通过控制器对误差信号进行处理,使执行机构能够更快、更准确地进行控制。
伺服控制系统中最常见的控制器是PID控制器,即比例、积分、微分控制器。
二、伺服控制系统的优化方法伺服控制系统在应用中存在诸多问题,例如:机械结构的精确度、电器元件的性能、控制复杂度等。
因此,在实际应用中,需要对伺服控制系统进行优化。
(一)优化PID参数PID控制器是伺服控制系统中最常用的控制器,也是最容易进行优化的部分。
对于PID控制器的优化,有以下几个方面:1.比例系数Kp:增加Kp可增加系统的响应速度,但若Kp太大,可能会导致系统出现震荡和不稳定的情况。
2.积分时间Ti:增加Ti可使系统更快地消除偏差,但同样存在过度振荡的风险。
3.微分时间Td:增加Td可减少过度振荡,但可能会导致系统变得慢反应。
针对PID控制器的优化,可以根据实际情况,采取多种方法进行调整,建立数学模型并进行优化计算。
(二)优化机械结构伺服控制系统中的机械结构非常重要,其精度与机械运动的响应速度和准确度直接相关。
因此,在实际应用中,需要对机械结构进行优化,例如:1.改进传动系统,使用更精密的减速器和传感器;2.加强机械结构的稳定性,增加支撑和润滑;3.优化机械屏幕的设计,减少机械振动和误差;通过对机械结构的优化,可以提高伺服控制系统的精度和稳定性,从而更加准确地实现控制目标。
《面向数控的伺服控制器的设计与实现》
《面向数控的伺服控制器的设计与实现》面向数控的伺服控制器设计与实现一、引言随着制造业的快速发展,数控技术已经成为现代制造业中不可或缺的一部分。
伺服控制器作为数控系统中的关键部件,其性能的优劣直接影响到整个数控系统的运行效率和加工精度。
因此,本文旨在设计并实现一种面向数控的伺服控制器,以满足现代制造业对于高精度、高效率的加工需求。
二、系统设计1. 硬件设计伺服控制器的硬件设计主要包括主控制器、驱动器、电机和传感器等部分。
主控制器采用高性能的DSP或FPGA芯片,以实现高速的数据处理和控制算法运算。
驱动器采用先进的电力电子技术,将主控制器的控制信号转换为电机所需的驱动信号。
电机选用高精度、高转矩的伺服电机,以保证加工精度和运动平稳性。
传感器采用高精度的位置和速度检测装置,实时反馈电机的位置和速度信息。
2. 软件设计伺服控制器的软件设计主要包括控制系统软件和通信接口软件两部分。
控制系统软件采用数字信号处理技术,实现对电机的高精度控制。
通信接口软件则负责与上位机进行通信,接收上位机的控制指令,并将电机的状态信息反馈给上位机。
三、控制算法设计与实现1. 位置控制算法位置控制算法是伺服控制器的核心算法之一。
本文采用PID 控制算法,通过实时比较目标位置和实际位置,计算出差值,并根据差值调整电机的运动状态,使电机能够快速、准确地到达目标位置。
2. 速度控制算法速度控制算法是保证电机运动平稳性的关键。
本文采用矢量控制算法,通过控制电机的电流和电压,实现对电机速度的精确控制。
同时,还采用了加速度控制算法,根据电机的运动状态和加速度限制,合理规划电机的运动轨迹,以保证电机的运动平稳性和加工精度。
四、实验与结果分析为了验证本文设计的伺服控制器的性能,我们进行了多组实验。
实验结果表明,本文设计的伺服控制器具有高精度、高效率的加工性能,能够满足现代制造业对于高精度、高效率的加工需求。
具体来说,本文设计的伺服控制器在位置控制方面具有较高的稳定性,能够在短时间内快速到达目标位置;在速度控制方面,能够实现对电机速度的精确控制,保证电机的运动平稳性;在加工精度方面,能够满足高精度的加工需求,提高加工效率和质量。
伺服控制系统的硬件设计
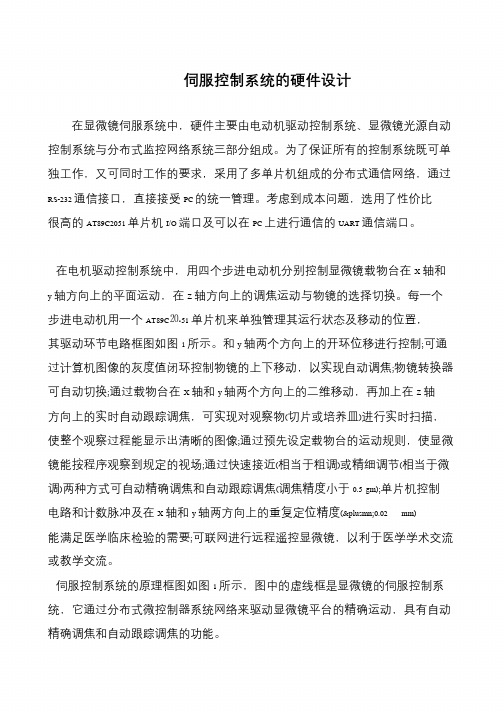
伺服控制系统的硬件设计在显微镜伺服系统中,硬件主要由电动机驱动控制系统、显微镜光源自动控制系统与分布式监控网络系统三部分组成。
为了保证所有的控制系统既可单独工作,又可同时工作的要求,采用了多单片机组成的分布式通信网络,通过RS-232 通信接口,直接接受PC 的统一管理。
考虑到成本问题,选用了性价比很高的AT89C2051 单片机I/O 端口及可以在PC 上进行通信的UART 通信端口。
在电机驱动控制系统中,用四个步进电动机分别控制显微镜载物台在X 轴和y 轴方向上的平面运动,在Z 轴方向上的调焦运动与物镜的选择切换。
每一个步进电动机用一个AT89C⒛51 单片机来单独管理其运行状态及移动的位置,其驱动环节电路框图如图1 所示。
和y 轴两个方向上的开环位移进行控制;可通过计算机图像的灰度值闭环控制物镜的上下移动,以实现自动调焦;物镜转换器可自动切换;通过载物台在X 轴和y 轴两个方向上的二维移动,再加上在Z 轴方向上的实时自动跟踪调焦,可实现对观察物(切片或培养皿)进行实时扫描,使整个观察过程能显示出清晰的图像;通过预先设定载物台的运动规则,使显微镜能按程序观察到规定的视场;通过快速接近(相当于粗调)或精细调节(相当于微调)两种方式可自动精确调焦和自动跟踪调焦(调焦精度小于0.5 gm);单片机控制电路和计数脉冲及在X 轴和y 轴两方向上的重复定位精度(±0.02 mm) 能满足医学临床检验的需要;可联网进行远程遥控显微镜,以利于医学学术交流或教学交流。
伺服控制系统的原理框图如图1 所示,图中的虚线框是显微镜的伺服控制系统,它通过分布式微控制器系统网络来驱动显微镜平台的精确运动,具有自动精确调焦和自动跟踪调焦的功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
日本是世界上太阳能开发利用第一大国,也是太阳能应用技术强国。日本太阳热能的
[12] 利用, 从 1979 年第二次石油危机后开始, 1990 年进入普及高峰。 太阳能技术日益创新,
能量转换率不断提高,成本也是新能源中最低的。日本将太阳能的利用分为太阳光能和热 能两种。太阳光能发电,是利用半导体硅等将光转化为电能。从 2000 年起,日本太阳能 发电量一直居世界首位,2003 年太阳能发电装机容量约为 86 万千瓦,占世界太阳能发电 装机容量的 49.1%,并计划到 2010 年达到 482 万千瓦,增加约 6 倍。 德国对太阳能资源的利用可追溯到 20 世纪 70 年代,现在德国已经在太阳能系统的开 发、生产、规划和安装等方面积累了大量经验,发明了一系列高效的太阳能系统。1990 年 德国政府推出了“一千屋顶计划”
1.3 课题研究的目的
本课题研究一种基于光电传感器的太阳光线自动跟踪装置,该装置能自动跟踪太阳光 线的运动,保证太阳能设备的能量转换部分所在平面始终与太阳光线垂直,提高设备的能 量利用率。
1.4 研究课题的意义
1.4.1 新环保能源
长期以来[6],世界能源主要依靠石油和煤炭等矿物燃料,而这些矿物作为一次性不可 再生资源,储量有限,而且燃烧时产生大量的二氧化碳,造成地球气温升高,生态环境恶 化。据国际能源机构预测,人类正面临矿物燃料枯竭的严重威胁。这种全球性的能源危机, 迫使各国政府投入大量的人力和财力,研究和开发新能源,如太阳能等。 能源危机,环境保护成为当今世界关注的热点问题。据联合国环境规划署资料[7],目 前矿物燃料提供了世界商业能源的 95%, 且其使用在世界范围内以每 10 年 20%的速度增长。
能源是人类社会赖以生存和发展的物质基础。当前,包括我国在内的绝大多数国家都 以石油、天然气和煤炭等矿物燃料为主要能源。随着矿物燃料的日渐枯竭和全球环境的不 断恶化,很多国家都在认真探索能源多样化的途径,积极开展新能源和可再生能源的研究 开发工作[1]。 虽然在可预见的将来,煤炭、石油、天然气等矿物燃料仍将在世界能源结构中占有相 当的比重,但人们对核能以及太阳能、风能、地热能、水力能、生物能等可持续能源资源 的利用日益重视,在整个能源消耗中所占的比例正在显著地提高。据统计[2],20 世纪 90 年代,全球煤炭和石油的发电量每年增长 l%,而太阳能发电每年增长达 20%,风力发电的 年增长率更是高达 26%。预计在未来 5 至 10 年内,可持续能源将能够与矿物燃料相抗衡, 从而结束矿物燃料一统天下的局面。 相对于日益枯竭的化石能源来说,太阳能似乎是未来社会能源的希望所在。
[13]
,至 1997 年已完成近万套屋顶系统,每套容量 1~
5 千瓦,累计安装量已达 3.3 万千瓦。根据德国联邦太阳能经济协会的数字,在过去的几
3 2010/12
毕业设计论文
年中,德国太阳能相关产品的产量增加了 5 倍,增速比其他国家平均水平高出一倍。另据 德新社报道,全球最大的太阳能发电厂已在德国南部巴伐利亚州正式投入运营。这家太阳 能发电厂投资 7000 万欧元,占地 77 万平方米,发电总容量达 12 兆瓦,能为 3500 多个家 庭供电。截至 2005 年年底,德国共有 670 万平方米的屋顶铺设了太阳能集热器,每年可 生产 4700 兆瓦的热量。已用 4%的德国家庭利用了清洁环保、用之不竭的太阳能,估计每 年可节约 2.7 亿升取暖用油。 目前,美国太阳能光伏发电已经形成了从多晶硅材料提纯、光伏电池生产到发电系统 制造比较完备的生产体系。2005 年,美国光伏发电总容量达到 100 万千瓦,排在日本和德 国之后,居世界第 3 位。为了降低太阳能光伏发电系统的生产成本,美国政府最近制定了 阳光计划,大幅度增加了光伏发电的财政投入,加快多晶硅和薄膜半导体材料的研发,提 高太阳能光伏电池的光电转化效率。 目前, 美国正在新建几座新的太阳能电站。 预计到 2015 年,美国光伏发电成本将从现在的 21~40 美分/千瓦时降到 6 美分/千瓦时,届时,太阳 能光伏发电技术的竞争力将会大大增强。太阳能在能源发展中占有相当的优势,据美国博 士对世界一次能源替代趋势的研究结果表明,到 2050 年后,核能将占第一位,太阳能占 第二位, 世纪末, 21 太阳能将取代核能占第一位, 很多国家对太阳能的利用加强了重视[14]。 意大利 1998 年开始实行“全国太阳能屋顶计划” ,将于 2002 年完成,总投入 5500 亿 里拉,总容量达 5 万千瓦。印度也于 1997 年 12 月宣布,将在 2002 年前推广 150 万套太 阳能屋顶系统。法国已经批准了代号为“太阳神 2006”的太阳能利用计划,按照该计划, 每年将投入 3000 万法郎资金,到 2006 年,法国每年安装太阳能热水器的用户达 2 万家。 我国由建设部制定的《建筑节能“九五”计划和 2010 年规则》中已将太阳能热水系 统列入成果推广项目。目前我国太阳能热水器的推广普及十分迅速[15],1997 年销售面积 近 300 万平方米,数量居世界首位。全国从事太阳能热水器研制、生产、销售和安装的企 业达 1000 余家,年产值 20 亿元。根据我国 1996~2020 年太阳能光电 PV(光伏发电)发 展计划,在 2000 年和 2020 年的太阳能光电总容量将分别达到 6.6 万千瓦和 30 万千瓦。 在联网阳光电站建设方面,计划 2020 年前建成 5 座 MW 级阳光电站。由国家投资 1700 万 元修建的西藏第三座太阳能电站——安多光伏电站,总装机容量 100 千瓦,于 1998 年 12 月建成发电。这也是世界海拔最高、中国装机容量最大的太阳能电站。总之,大力发展太 阳能利用技术,使节约能源和保护环境的重要途径。
4 2010/12
毕业设计论文
型太阳能跟踪装置,该装置利用控制电机完成跟踪,采用铝型材框架结构,结构紧凑,重 量轻,大大拓宽了跟踪器的应用领域。在国内近年来有不少专家学者也相继开展了这方面 的研究,1992 年推出了太阳灶自动跟踪系统,1994 年《太阳能》杂志介绍的单轴液压自 动跟踪器,完成了单向跟踪。 目前[17],太阳追踪系统中实现追踪太阳的方法很多,但是不外乎采用如下两种方式: 一种是光电追踪方式,另一种是根据视日运动轨迹追踪;前者是闭环的随机系统,后者是 开环的程控系统。
1.2.2 我国太阳能资源
我国幅员广大,有着十分丰富的太阳能资源。我国地处北半球欧亚大陆的东部,土地 辽阔,幅员广大。我国的国土跨度从南到北、自西至东,距离都在 5000km 以上,总面积 达 960×10 km,占世界总面积的 7%,居世界第三位。据估算[3],我国陆地表面每年接收的 太阳辐射能约为 50×10 KJ,全国各地太阳年辐射总量达 335~837KJ/cm2·A,中值为 586KJ/cm2·A。从全国太阳年辐射总量的分布来看,西藏、青海、新疆、内蒙古南部、山 西、陕西北部、河北、山东、辽宁、吉林西部、云南中部和西南部、广东东南部、福建东 南部、海南岛东部和西部以及台湾省的西南部等广大地区的太阳辐射总量很大。尤其是青 藏高原地区最大,那里平均海拔高度在 4000m 以上,大气层薄而清洁,透明度好,纬度低, 日照时间长。例如被人们称为“日光城”的拉萨市,1961 年至 1970 年的平均值,年平均 日照时间为 3005.7h,相对日照为 68%,年平均晴天为 108.5 天,阴天为 98.8 天,年平 均云量为 4.8,太阳总辐射为 816KJ/cm2·A,比全国其它省区和同纬度的地区都高。全国 以四川和贵州两省的太阳年辐射总量最小,其中尤以四川盆地为最,那里雨多、雾多,晴 天较少。例如四川省省会成都市,年平均日照时数仅为 1152.2h,相对日照为 26%,年平 均晴天为 24.7 天,阴天达 244.6 天,年平均云量高达 8.4。其它地区的太阳年辐射总量居
本文由promacho贡献
doc文档可能在WAP端浏览体验不佳。建议您优先选择TXT,或下载源文件到本机查看。
毕业设计论文
1 绪论
1.1 课题来源
模拟生产实际课题:太阳能自动跟踪系统设计。
1.2 课题背景
1.2.1 能源现状及发展
1.6 太阳追踪系统的国内外研究现状
在太阳能跟踪方面,我国在 1997 年研制了单轴太阳跟踪器,完成了东西方向的自动 跟踪,而南北方向则通过手动调节,接收器的接收效率提高了。1998 年美国加州成功的研 究了 ATM 两轴跟踪器[16],并在太阳能面板上装有集中阳光的透镜,这样可以使小块的太 阳能面板硅收集更多的能量,使效率进一步提高。2002 年 2 月美国亚利桑那大学推出了新
1.4.2 提高太阳能的利用率
太阳能是一种低密度、间歇性、空间分布不断变化的能源[9],这就对太阳能的收集和 利用提出了更高的要求。尽管相继研究出一系列的太阳能装置如太阳能热水器、太阳能干 燥器、太阳能电池等等,但太阳能的利用还远远不够,究其原因,主要是利用率不高。就 目前的太阳能装置而言,如何最大限度的提高太阳能的利用率,仍为国内外学者的研究热 点。解决这一问题应从两个方面入手[10],一是提高太阳能装置的能量转换率,二是提高 太阳能的接收效率,前者属于能量转换领域,还有待研究,而后者利用现有的技术则可解 决。太阳跟踪系统为解决这一问题提供了可能。不管哪种太阳能利用设备,如果它的集热 装置能始终保持与太阳光垂直,并且收集更多方向上的太阳光,那么,它就可以在有限的 使用面积内收集更多的太阳能。但是太阳每时每刻都是在运动着,集热装置若想收集更多 方向上的太阳光,那就必须要跟踪太阳。香港大学建筑系的教授研究了太阳光照角度与太 阳能接收率的关系,理论分析表明[11]:太阳的跟踪与非跟踪,能量的接收率相差 37.7%, 精确的跟踪太阳可使接收器的接收效率大大提高,进而提高了太阳能装置的太阳能利用 率,拓宽了太阳能的利用领域。
2 2010/12
毕业设计论文
这些燃料的燃烧构成改变候的温室气体的最大排放源,按照可持续发展的目标模式,决 不能单靠消耗矿物原料来维持日益增长的能源需求。因此越来越多的国家都在致力于对可 再生能源的深度开发和广泛利用。其中具有独特优势的太阳能开发前景广阔。日本经济企 划厅和三泽公司合作研究认为,到 2030 年,世界电力生产的一半将依靠太阳能。 基于当今世界能源问题和环境保护问题已成为全球的一个“人类面临的最大威胁”的 严重问题,本课题的目的是为了更充分的利用太阳能、提高太阳能的利用率,而进行太阳 追踪系统的开发研究,这对我们面临的能源问题有重大的意义。同时太阳能又是一种无污 染的清洁能源,加强太阳能的开发,对节约能源、保护环境也有重大的意义[8]。