实验九Z变换
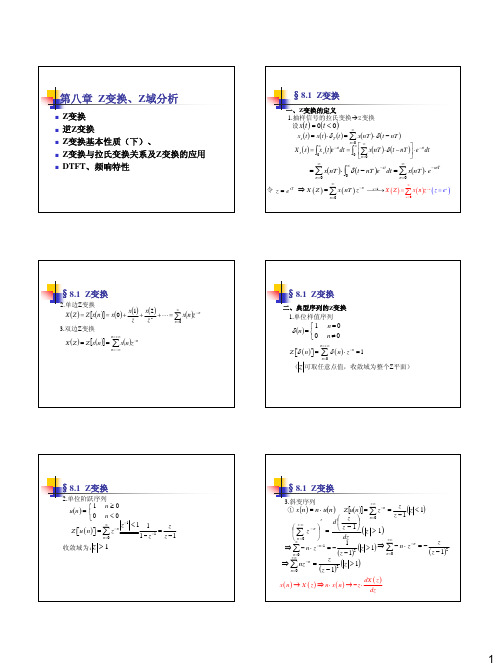
2.7 Z变换

本书只讨论第一种Z变换
பைடு நூலகம்
二、z变换的收敛域与零极点
1.收敛域:对于任意给定序列x(n),使其z变换
X(z)收敛的所有z值的集合称为X(z)的收敛域。 用符号ROC(range of convergence)表示。 根据级数理论,级数收敛的充要条件是:
n =−∞
∑
∞
x ( n) z
−n
≤
n =−∞
其z变换:X ( z ) =
n =−∞
∑
0
x(n ) z − n + ∑ x(n) z − n
n =1
n2
前式Roc: 0 ≤ z < Rx + 后式Roc: < z ≤ ∞ 0
∴当n2 ≤ 0时,Roc : 0 ≤ z < Rx+ 当n2 > 0时,Roc : 0 < z ≤ ∞ 即左边序列的收敛域是某个圆的内部 z < Rx+
列,只有同时给出收敛域才能唯一确定。
2. X(z)在收敛域内不能有极点,故:
右边序列的z变换收敛域一定在模最大的有 大 右边序列 限极点所在圆之外 之外 左边序列的z变换收敛域一定在模最小的有 左边序列 小 限极点所在圆之内 之内
四、Z变换的基本性质与定理 变换的基本性质与定理 1、线性 、
若
则
Z [ x(n)] = X ( z ) Rx− < z < Rx+
例1 求x(n) = −a nu (−n − 1)的z变换及其收敛域 :
解:X(z)= ∑ x(n) z = ∑ −a u ( −n − 1) z
−n n n =−∞ n =−∞ ∞ ∞ −n
= ∑ −a z = ∑ −a z
Z变换详细讲解2
f (t)
j
F
(s)e
st
ds
由于z esT , dz Te sT
Tz
j
ds
f (t) f (nT ) f (n)
F (s) f (n)z n F (z) n
e sT e snT z n
ds 1 dz dz Tz z
j
j
c
10
f (n) 1 F (z)z n1dz 令z re j
n0
zm x(n m)z(nm) zm x(k)zk
n0
k m
zm
x(k ) z k
m1
x(k ) z k
k 0
k 0
zm
X
(z)
m1
x(k ) z k
k 0
15
(3)双边右移序列旳单边Z变换
X (z) x(n)u(n)zn n0
ZT[x(n m)u(n)] x(n m)zn
.画出下列系统函数所表示系统的建立级联和 并联形式的结构图。
H (z) 3z3 5z 2 10z z3 3z2 7z 5
解:
H
(
z
)=
(
z z
(3z 2 1)(
z2
5z 10) 2z 5)
1 1 z 1
3 5z 1 1 2z 1
10z 2 5z2
1
H (z)
1 1 z1
br z r
r 0
N
ak zk
k 0
请注意这里 与解差分有 何不同?
因果!
22
(2)定义二:系统单位样值响应h(n) 旳Z变换
• 鼓励与单位样值响应旳卷积为系统零状
态响应
y(n) x(n)*h(n)
实验-Z变换、零极点分析
(一)离散时间信号的Z 变换1.利用MATLAB 实现z 域的部分分式展开式MATLAB 的信号处理工具箱提供了一个对F(Z)进行部分分式展开的函数residuez(),其调用形式为:[r,p,k]=residuez(num,den)式中,num 和den 分别为F(Z)的分子多项式和分母多项式的系数向量,r 为部分分式的系数向量,p 为极点向量,k 为多项式的系数向量。
【实例1】 利用MATLAB 计算321431818)(-----+zz z z F 的部分分式展开式。
解:利用MATLAB 计算部分分式展开式程序为% 部分分式展开式的实现程序num=[18];den=[18 3 -4 -1];[r,p,k]=residuez(num,den)2.Z 变换和Z 反变换MATLAB 的符号数学工具箱提供了计算Z 变换的函数ztrans()和Z 反变换的函数iztrans (),其调用形式为)()(F iztrans f f ztrans F ==上面两式中,右端的f 和F 分别为时域表示式和z 域表示式的符号表示,可应用函数sym 来实现,其调用格式为()A sym S =式中,A 为待分析的表示式的字符串,S 为符号化的数字或变量。
【实例2】求(1)指数序列()n u a n 的Z 变换;(2)()()2a z az z F -=的Z 反变换。
解 (1)Z 变换的MATLAB 程序% Z 变换的程序实现f=sym('a^n');F=ztrans(f)程序运行结果为:z/a/(z/a-1)可以用simplify( )化简得到 :-z/(-z+a)(2)Z 反变换的MATLAB 程序% Z 反变换实现程序F=sym('a*z/(z-a)^2');f=iztrans(F)程序运行结果为f =a^n*n(二)系统函数的零极点分析1. 系统函数的零极点分布离散时间系统的系统函数定义为系统零状态响应的z 变换与激励的z 变换之比,即)()()(z X z Y z H = (3-1)如果系统函数)(z H 的有理函数表示式为:11211121)(+-+-++++++++=n n n n m m m m a z a z a z a b z b z b z b z H (3-2) 那么,在MATLAB 中系统函数的零极点就可通过函数roots 得到,也可借助函数tf2zp 得到,tf2zp 的语句格式为:[Z,P,K]=tf2zp(B,A)其中,B 与A 分别表示)(z H 的分子与分母多项式的系数向量。
0904053生物医学信号处理课程教学大纲

《生物医学信号处理》课程教学大纲一、课程基本信息课程编号:0904053课程中文名称:生物医学信号处理课程英文名称:Biomedical Signal Processing课程性质:专业主干课程考核方式:考试开课专业:生物医学工程开课学期:7总学时:32 (其中理论20学时,上机12学时)总学分: 2二、课程目的本课程是生物医学工程专业的专业主干课程。
通过讲述生物医学信号数字处理的基础知识、处理方法及其具体应用等内容,使学生了解生物医学信号处理的理论,掌握信号转换、数字滤波器的设计、时域和频域的分析等技术和方法,具有解决生物医学信号检测中具体问题的能力。
三、教学基本要求(含素质教育与创新能力培养的要求)1、了解生物医学信号的特点、生物医学信号处理的特殊要求。
2、掌握生物医学数字信号时域处理、频域处理的基本原理和方法。
3、掌握ECG信号处理的基本方法,具有编写程序进行信号分析的基本能力。
四、教学内容与学时分配第一章计算机在医学中的应用(0.5学时)医学数据的特点;一些典型生物医学信号的介绍;数字滤波器的软件设计第二章心电图(0.5学时)基本的心电图;ECG导联系统;ECG信号特点第三章信号转换(1学时)采样技术基础;简单信号转换系统;生物医学信号的转换要求;信号转换电路第四章数字滤波器基础(2学时)Z变换;数字滤波器的组成、类型;差分方程的传递函数;Z平面极零分布图第五章有限冲激响应滤波器(1学时)FIR滤波器的特性;平滑滤波器;陷波滤波器;窗的设计;频率采样;最小设计第六章无限冲击响应滤波器(1学时)IIR滤波器的通用表达式;简单单极点实例;积分器;双极点滤波器的设计方法第七章整数型滤波器(4学时)基本设计概念;低通整数型滤波器;高通整数型滤波器;带通和带阻整数型滤波器;滤波器级联效应;其他快速设计方法;设计举例和设计工具第八章自适应滤波器(3学时)基本的噪声消除模型;消除60Hz干扰的模型;自适应滤波器的其他应用第九章信号平均(1学时)信号平均的基础;典型的平均器;信号平均的局限性;信号拟合及其应用第十章数据压缩技术(0学时)第十一章其他时域及频域分析方法(1学时)傅立叶变换;相关;卷积;功率谱第十二章ECG的QRS复波的检测(3学时)ECG的功率谱;带通滤波法;差分法;模板匹配法;QRS复波检测算法第十三章ECG分析系统(1学时)ECG分析;ST段分析;便携式心律失常监护仪第十四章VLSI在数字信号处理中的应用(1学时)VLSI在医学中的应用;用于生物医学信号的传感器;VLSI开发工具;设计方案的选择五、教学方法及手段(含现代化教学手段及研究性教学方法)理论教学(课堂讲授)六、实验(或)上机内容实验一:ECG模拟滤波器(2学时)必做实验二:MIT ECG数据获取(2学时)必做实验三:整数型滤波器设计(2学时)必做实验四:ECG 的频域分析(2学时)必做实验五:信号转换(2学时)选做实验六:数字滤波器设计(2学时)选做实验七:50Hz自适应滤波器(2学时)选做实验八:ECG 信号平均(2学时)选做实验九:QRS复波检测(2学时)选做七、先修课程先修课程:数字信号处理。
z变换实验报告
南昌大学实验报告(信号与系统)学生姓名:肖江学号:6100210030 专业班级:电子103班实验类型:□验证□综合□设计□创新实验日期:2012/6/1 实验成绩:Z变换、离散时间系统的Z域分析一、实验目的1、学会用matlab求解z变换与逆z变换。
2、学会离散系统零极点分布图的绘制,理解离散系统零极点分布图的含义。
3、求解离散系统的频率响应特性。
二、实验说明1、一离散系统的差分方程为y(n)-by(n-1)=x(n),若激励为x(n)=a n u(n),起始值y(-1)=0,求响应y(n)。
2、当H(s)极点位于z平面中各方框附近的位置,画出对应的h(n)波形填入方框中。
3、求系统差分方程为y(n)-1.1y(n-1)+0.7y(n-2)=x(n-1),的系统的频率响应特性。
三、实验内容1、syms n a b z%定义符号n a b zx=a^n; %定义激励信号X=ztrans(x); %计算激励信号的变换H=1/(1-b*z^(-1)); %写出系统z变换式Y=H*X; %计算输出的变换式y1=iztrans(Y); %计算输出时域表达式y=simplify(y1) %化简表达式2、pos=[26,19,18,17,24,27,13,11,9,23,28,7,4,1,22];figure,id=1; %生成新图框,子图id初始化为1for r=0.8:0.2:1.2 %极点的幅度依次为0.8,1.0,1.2for theta=0:pi/4:pi %极点的弧度依次为0,Π/4,Π/2,3Π/4,Πp=r*exp(j*theta);if theta~=0&theta~=pip=[p;p']; %如果极点不在实轴上添加一个共轭极点end[b a]=zp2tf([],p,1); %由零极点得到传递函数subplot(4,7,pos(id));[h,t]=impz(b,a,20); %计算20个点的单位样值响应stem(t,h,'k-','MarkerSize',5);%绘制单位样值响应id=id+1; %子图序号加1end%退出弧角循环end%退出幅度循环3、a=[1,-1.1,0.7];b=[0,1];subplot(2,1,1),zplane(b,a); %绘制零极点分布图subplot(2,1,2),impz(b,a); %绘制单位样值响应figure,freqz(b,a) %绘制频率特性4、a=[1,-1.1,0.6];b=[0.6,-1.1,1];subplot(2,1,1),zplane(b,a); %绘制零极点分布图subplot(2,1,2),impz(b,a); %绘制单位样值响应figure,freqz(b,a); %绘制频率响应n=[0:40]'; %生成时间点x1=sin(0.1*pi*n); %生成单频信号x2=0*n; %准备方波信号x2(mod(n,10)<5)=1; %生成周期为10的方波信号y1=filter(b,a,x1); %分别对两个信号滤波y2=filter(b,a,x2);figuresubplot(2,1,1),stem(n,x1); %绘制单频信号及其输出波形subplot(2,1,2),stem(n,y1);figuresubplot(2,1,1),stem(n,x2); %绘制方波信号及其输出波形subplot(2,1,2),stem(n,y2);四、实验结果1、y =(a^(1+n)-b^(1+n))/(a-b)2、输出波形如下3、输出波形如下:4、输出波形如下:五、实验总结通过本次实验的学习,对离散系统有了更多的了解,通过用matlab画出离散系统的零极点分布图,使我对离散系统的零极点分布与其对用的频响特性有了深刻的了解;同时对全通网络的相频失真有了进一步了解,幅度没有失真,但对不同的频率信号的相移不同,因此单频信号输入时,其输出信号的波形没有失真,只是整个波形发生了移位,但对于方波信号,由于其中包含了各种频率的信号,因此不同频率的信号相频失真不同,因此输出波形不再是方波。
Z变换及其收敛域

作业:4-1(1,3,9)、4-4(1,3,11)、4-5、 4-6、4-9、4-10(1)
31 return
1.连续信号
收敛域为( (A) a
f (t ) t e
)。
n
at
u ( t ) ,该信号拉普拉斯变换
(C) 0 (D) a
(B) a
z1
终值定理使用的条件
1、只有在n时x(n)收敛的情况,才能用它 来确定x(n)的值。 2、X(z)的收敛半径应小于或等于1
18
(七)时域卷积定理 若
Z x ( n ) X ( z ),
Z y ( n ) Y ( z ),
R x1 z R x 2
R y1 z R y 2
在Z域反褶,则时域中函数在正负之间交 替跳跃
16
(五)初值定理
若x(n)是单边序列,且 则
Z x ( n ) X ( z )
x ( 0 ) lim X ( z )
z
17
(六)终值定理 若x(n)是单边序列,且
Z x ( n ) X ( z )
则
n
lim x ( n ) lim ( z 1 ) X ( z )
2 j 1 2 j
j j
j
j
snT n F (s) e z ds n0
sT 1 F (s) e z n0
n
ds
28
当 e
sT
z
1
1, 即 z e
sT
sT
和式收敛于
(e
Z变换PPT课件
-
19
10.2.3 部分分式展开法
将z变换函数X(z)展开成部分分式之和,然后查z变换
表,求相应的x*(t)。
两端取Z变换得
(a o a 1 z 1 a 2 z 2 a n 1 z n 1 a n z n )X o (z) (b o b 1 z 1 b 2 z 2 b m 1 z m 1 b m z m )X i(z)
故离散控制系统的传递函数为
G (z ) X o (z ) b o b 1 z 1 b 2 z 2 b m 1 z m 1 b m z m X i(z ) a o a 1 z 1 a 2 z 2 a n 1 z n 1 a n z n
x(t)
x * (t)
x(t)
T x* (t)
0 1T 2T 3T 4T t
0 1T 2T 3T 4T t
采样器的功能是将连续信号转换成发生在采样瞬时刻 0,T,2T,3T,…的一连串脉冲信号,
-
2
保持器:能够将采样信号转换成连续信号,这个连续信 号近似地重现采样器上的信号.
最简单的零阶保持器,它能将采样信号转变成在两个连 续采样瞬时之间保持常量的信号。
Cn(n=0,1,2…..)即为x(t)在采- 样时刻 t=nT 时的值 x(nT). 18
例10-18 求 X(z) 0.5z 的逆变换。
(z1)(z0.5)
解 X(z) 0.5z 0.5z
(z1)z(0.5) z21.5z0.5
利用综合除法得 X ( z ) 0 .5 z 1 0 .7 z 2 5 0 .8z 7 3 0 .5 9z 3 4 75
Z变换
0< z ≤∞
n1 ≥ 0 n2 ≤ 0
嘉兴学院
0≤ z <∞
数字信号处理
16
2. z变换的收敛域
有限长序列收敛域 除外) , 除外 (n1<0,n2>0;z=0,z=∞除外)
嘉兴学院
数字信号处理
2. z变换的收敛域
(2)右边序列 ) 在
17
n ≥ n1 时 x ( n ) 有值,在 n < n1 时 x ( n ) = 0 有值,
嘉兴学院
数字信号处理
z = re
jω
jω
|r =1 = e
∞
jω
7
ω = ΩTs = 2π f f s
X (e ) =
n =−∞
∑ x ( n )e
− jω n
离散时间序列的 傅里叶变换, 傅里叶变换, DTFT
z 平面
Im[z]
z 平面
Re[z]
Im[z]
r =1
0
Re[z]
0
嘉兴学院
数字信号处理
数字信号处理
23
2. z变换的收敛域
(4)双边序列 ) 在n为任意值 时 ,x(n)皆有值的序列 ,可以看成 为任意值 皆有值的序列 可以看成: 双边序列=右边序列+ 双边序列=右边序列+左边序列
X (z) =
n = −∞
∑
∞
x(n) z
−n
=
∑
∞
x(n) z
收 敛 域
−n
+
n=0
n = −∞
∑
收 敛 域
8
连续时间信号
X (s) =
∆
∫
∞
jΩ
z变换的基本知识

z变换基本知识1z变换定义连续系统一般使用微分方程、拉普拉斯变换的传递函数和频率特性等概念进行研究。
一个连续信号f(t)的拉普拉斯变换F(s)是复变量s的有理分式函数;而微分方程通过拉普拉斯变换后也可以转换为s的代数方程,从而可以大大简化微分方程的求解;从传递函数可以很容易地得到系统的频率特征。
因此,拉普拉斯变换作为基本工具将连续系统研究中的各种方法联系在一起。
计算机控制系统中的采样信号也可以进行拉普拉斯变换,从中找到了简化运算的方法,引入了z变换。
连续信号f(t)通过采样周期为T的理想采样开关采样后,采样信号f*(t)的表达式为OOf*(t)=1,f(kT)、(t-kT)=f(0)、(t)f(T)、(t-T)•f(2T)、(t-2T)k Of(3T)5(t-3T)+|||(1)对式(1)作拉普拉斯变换F*(s)=L[f*(t)]=f(0)f(T)e^f(2T)e'sT f(3T)e4T lMod=£f(kT)e3r(2)k0从式(2)可以看出,F*(s)是s的超越函数,含有较为复杂的非线性关系,因此仅用拉普拉斯变换这一数学工具,无法使问题简化。
为此,引入了另一个复变量“z”,令z=e sT(3)代入式(2)并令F*(x)i=F(z),得s平lnzF(z)=F(0)+f(T)z,+f(2T)zN+|||=:ff(kT)z-(4)k 0式(4)定义为采样信号£*("的2变换,它是变量z 的幕级数形式,从而有利于问题的简化求解。
通常以F(z)=L[f*(t)]表示。
由以上推导可知,z 变换实际上是拉普拉斯变换的特殊形式,它是对采样信 号作z=e sT 的变量置换。
f*(t)的z 变换的符号写法有多种,如Z[f*(t)],Z[f(t)],Z[f(k)],Z[F*(s)],F(z)等,不管括号内写的是连续信号、离散信号还是拉普拉斯变换式,具概念都应该理解为对采样脉冲序列进行z 变 换。
Z变换
• 数字控制器的连续化设计步骤
– 设计假想的连续控制器 – 选择采样周期 T – 将D(s)离散化为D(z) – 设计由计算机实现的控制算法 – 校验
2020/3/8
计算机控制技术
20
第5章 数据处理与控制策略
5.2.1 数字控制器的连续化设计技术
• (2) 选择采样周期 T
Y (z)
1
1 5z1
6 z 2
z z1
1 2
z
z 1
4
z
z
2
9 2
z
z
3
第5章 数据处理与控制策略
取Z反变换得
yk 1 42k 9 3k
2
2
1 (3k 2 2k2 ) 2
第5章 数据处理与控制策略
5.2数字控制器的设计技术
证明: z1
z1
lim(1
z 1
z
1
)
F
(
z
)
lim
z 1
F
(
z
)
z
1F
(
z
)
lim
z 1
k 0
f
(k
(kT
T
)
z
k
f (kT ) f (kT T ) f (kT ) f (kT T )
k 0
k 0
k 0
f (0) f (T ) f (T ) f (0) f (2T ) f (T ) L f ()
Z变换实验报告
实验九 Z变换§9.1 作离散时间零极点图目的学习如何将一个离散时间有理系统函数)(zH的零极点展现一张零极点图。
下面的练习需要用到函数plotdpz,其具体实现如下。
函数plotdpz(b,a)画出离散时间系统的零极点。
plotdpz的输入和filter具有相同的格式,并且如果分子和分母多项式不是同阶次的话,plotdpz将自动的对a或b补上适当个数的零。
同时,plotdpz在图中还包括单位圆,以及如果在单位圆内有多于一个零点或极点的话,还会指出极点或零点的数目。
function plotdpz(b,a)la=length(a);lb=length(b);if (la>lb)b=[b zeros(la-lb)];elseif (lb>la)a=[a zeros(lb-la)];endps=roots(a);zs=roots(b);mx=max(abs([ps'zs'.95]))+.05;clg;axis([-mx mx -mx mx]);axis('equal');hold on;w=[0:.01:2*pi];plot(cos(w),sin(w),'.');plot([-mx mx],[0 0]);plot([0 0],[-mx mx]);text(0.1,1.1,'Im','sc');text(1.1,.1,'Re','sc');plot(real(ps),imag(ps),'X');plot(real(zs),imag(zs),'o');numz=sum(abs(zs)==0);nump=sum(abs(ps)==0);if numz>1text(-.1,-.1,num2str(numz));elseif nump>1text(-.1,-.1,num2str(nump));endhold off基本题1.用plotdpz画出(9.3)或)(zH的零极点图。
Z变换

n =−∞
∑
x(n ) z − n < ∞
(3)
使(3)式成立, Z变量取值的域称为收敛域。 一 般收敛域用环状域表示
Rx − < z < Rx +
第2章 时域离散信号和系统的频域分析 章
图 1 Z变换的收敛域
第2章 时域离散信号和系统的频域分析 章
常用的Z变换是一个有理函数, 用两个多项式之 比表示
z = zk
(7)
第2章 时域离散信号和系统的频域分析 章
如果zk是N阶极点, 则根据留数定理
1 d N −1 Re s[ X ( z ) z n −1 , zk ] = [( z − zk ) N X ( z ) z n −1 ] ( N − 1)! dz N −1
z = zk
(2.5.8)
由(2.5.8)式表明, 对于N阶极点, 需要求N-1次导 数, 这是比较麻烦的。 如果c内有多阶极点, 而c外没 有多阶极点, 可以根据留数辅助定理改求c外的所有极 点留数之和, 使问题简单化。 设被积函数用F(z)表示, 即
(5)
2π j ∫
c
X ( z ) z n −1dz,
第2章 时域离散信号和系统的频域分析 章
1. 用留数定理求逆Z变换 如果X(z)zn-1在围线c内的极点用zk表示, 根据留数 定理
2π j ∫
1
c
X ( z ) z n −1dz = ∑ Re s[ X ( z ) z n −1 , zk ]
z = e jω
(4)
第2章 时域离散信号和系统的频域分析 章
式中z=e jω表示在z平面上r=1的圆, 该圆称为单位 圆。 (4)式表明单位圆上的Z变换就是序列的傅里叶变 换。 如果已知序列的Z变换, 可用(4)式, 很方便的求 出序列的FT, 条件是收敛域中包含单位圆。 例 1 x(n)=u(n), 求其Z变换。 解:
Z变换 PPT课件
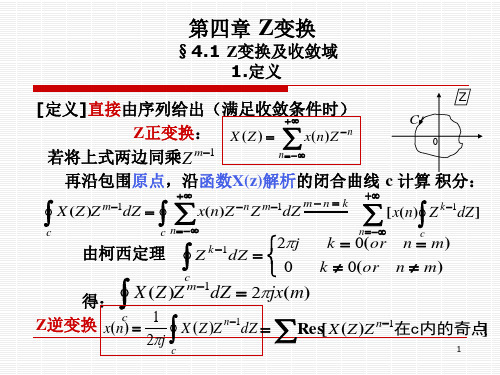
[x(n) Z k1dZ]
c
c n
由柯西定理
c
Z
k 1dZ
2j
0
n
c
k 0(or n m)
k 0(or n m)
得: X (Z )Z m1dZ 2jx(m)
Z逆变换
c
x(n)
1
X (Z )Z n1dZ
Res[X (Z)Z n1在c内的奇点]
x(n n1) 0
n n1
Z
比值值判 x(n 1)z (n1) x(n) z n
1
左边序列
某圆内 0? Z Rx2
X (z)
n2
x(n)z n
x(n n2) 0
Z
n
根值值判Z
1
lim n
n
x(n) R3x2
§4.1 Z变换及收敛域—2.收敛域
az 1
a2 z 2
...
a n
z
...
1 z 1 (a z) z a
a 1 or ROC : z a
z
X2(z)
x2 (n)zn
n
1
(a
n
)z
n
n
(a1z)m
m1
n0
A (n) A,
X (z) 分解为: 多项式 +
真分式
Y(Z) + N'(Z)/D(Z)
X (Z ) A BZ CZ 2 ... kZ hZ ... Z a Z b
Z变换的基本性质 ppt课件

k0
x1x0z1 x1z2 x(2)z3
x(-1)z-1[x0x1z1 x2z2 x3z3
x1z1Xz
X
14
第
Z变换的基本性质
页
根据单边z变换的定义,可得 Zxkm k xkm zk k0 zm xkmzkm k0
令nkmzm xnzn
nm
zmxnzn1xnzn
zRx1
Zx2(k)X2(z)
zRx2
则 Za1x(k)b2x(k)aX 1(z)bX 2(z)
a,b为任意常数。
ROC:一般情况下,取二者的重叠部分
即zmaRxx 1,R (x2)
注意:如相加过程出现零极点抵消情况,收敛域可能变大.
X
3
Z变换求 的c基o本k sh 性0(质k)的 z变换(。 自学)
则 x (k m )(k ) z m X (z ) 1x (k )z k z
k m
x k 1 ( k ) z 1 X z x 1 其中m为正整数
x k 2 ( k ) z 2 X z z 1 x 1 x 2
注意:对k于 0时 因 x, k果 0, 序 则 列
第 页
解:
已知
Zak(k) z
za
并且
cok sω h 0 1 2ekω 0ekω 0
所 Z c以 k o ω 0 ( s k ) h 1 2 Z e k ω 0( k ) 1 2 Z e k ω 0( k )
1z 1 z 2zeω0 2zeω0
z2z(2zzccoossω ω h0h01
X
6
Z变换的基本性质
第
页
1.双边z变换 2.单边z变换
(1) 左移位性质
Z变换

( z平面上的单位圆) ( z平面单位圆内) ( z平面单位圆外)
而z 的幅角 与 s 的虚部 的关系是线性关系。 即: T
0 0,2 s 0 z 1 / T
(S平面实轴映射到Z平面的正实轴) (S平面原点映射到z=1点)
z2 X ( z) 0.5<|z|<2, 求X(z)对 ( z 2)( z 0.5)
解:将X(z)变为X(z)/z的形式并化为部分分式
X ( z) z A1 A2 z ( z 2)( z 0.5) z 2 z 0.5
由求系数Ak的公式可得 A1 4 / 3, A2 1/ 3
zn X ( z ) z n1 (1 az )( z a) zn a( z a)( z a 1 )
例2-2-4 被积函数的极点
在收敛域 | a 1 || z || a 内,作包围原点的围线,当 n 0 时,只有一个单阶极点z=a,其围线积分为
1 an x(n) Re s[ z n , a] a( z a)( z a 1 ) 1 a2 n0
X ( z) (1 az 1 ) 1 例 2-2-6 用长除法求
za
的逆Z变换。 解:由收敛域知,这是一右边序列,用长除法将其 展开成z的负幂级数,将分母多项式按降幂排列:
1 az 1 1 az 1 a 2 z 2 1 1 az 1 az 1
n n
由于u(n)为因果序列,其Z变换收敛域为
Rx z ,因X(z)在z=1处有一极点,
极点应在收敛域外,因此u(n)的z变换收敛
域为:
z 1
例2-2-2 求序列
Z变换
z
−n
收敛域的充分条件为
x n=− ∞
∞
n z−n < ∞
∑ 判定正项级数 an 是否收敛?
正项级数
n=−∞
⎧< 1 收敛
①比值判别法:lim an+1 = ρ = ⎪⎨= 1
a n→∞ n
⎪⎩> 1
不一定 发散
⎧< 1
②根式判别法:lim n n→∞
an
= ρ = ⎪⎨= 1 ⎩⎪> 1
① n1 ≥ 0 时,序列的收敛域为:z > 0,包括 z = ∞ 点; ②n2 ≤ 0时,序列的收敛域为:z < ∞,不包括 z = ∞点;
③n1 < 0, n2 > 0时,序列的收敛域为:0 < z < ∞
§8.1 Z变换
6. 右边序列的Z变换收敛域至少为:∞ > z > Rx1
x(n)定义在 n ≥ n1 上。根据 n1值不同,可分为以下两种情况:
§8.1 Z变换
7①.x(左nn)2边定≤序义0n列时在2 ,的n 序Z≤变n列2换上为的。反收+根因∞ 敛据果域n序2至值列少不,为同收:,敛0可域< 分的z <为形R以式x2 下为两:种z <情R况x2: Z ⎡⎣x (n)⎤⎦ = ∑ x (n) z−n = ∑ x (−n) z,n 根据级数收敛的判别方法,
=
z2
zβ sinω0 − 2βz cosω0
+
β2
(z
>
β
)
§8.1 Z变换
[例1]:求下列各序列的Z变换
①δ (n − m)(m > 0)
n=+∞
Z变换及Z传递函数

F (z)
1 2j
(e
j t
e
j
t
)
1 2j
e j t e j t
1 z 2 j z e j T
z z e j T
1 2j
z2
e (e
j T j T
e j T e j T
)z
1
z sin T z2 2 z cos T
1
第2章 Z变换及Z传递函数
2.2 Z变换的性质和定理
变成离散的脉冲序列函数f *(t)即采样信号。
f*(t)f(kT )(tkT ) k0
对上式进行拉氏变换,则
第2章 Z变换及Z传递函数
对上式进行拉氏变换,则
F* (s) L[ f *(t)] f *(t) eTsdt
k 0
f (kT ) (t kT ) eTsdt
f (t)eat f (kT )eakT zk k 0
f (kT )(eaT z)k k 0
F (zeaT )
第2章 Z变换及Z传递函数
9.微分定理
设连续时间函数f(t)的Z变换为F(z),则有
tf (t)Tzd[F(z)]
证明:
dz
d[F(z)]
dz
d dz
k0
f
(kT)zk
解:将F(s)写成部分分式之和的形式
F(s) a 1 1 s(sa) s sa
a 1 1 a 2 1 s 1 0 s 2 a
F(z) z z z 1 z eaT
(1 ea T )z
z2 (1eaT)z eaT
第2章 Z变换及Z传递函数
2.1.2 常用信号的Z变换
1.单位脉冲信号 f(t)(t)
比较两式得: f ( 0 ) c 0 ,f ( T ) c 1 , ,f ( k ) T c k ,
数字信号处理基础-Z变换

求下列序列的 Z变换 ,并标标明收敛域,画出 极图。
1.x(n) ( 1 )n u(n) 3
2.x(n) ( 1 )n u(n 1) 3
3. x(n) ( 1 )n[u(n)u(n 8)] 3 (1)n n 0
4.x(n) 3
2n
no
2021/8/2
20
(1) x(n)1nu(n) 3
n2
X(z) x(n)zn nn2
圆内为收敛域,
n
m n
nm
X(z) x(m )zm x(n)zn
若 n2 0
则不包括z=0点
m n2
nn2
j Im[z]
lim n x ( n ) z n 1
R x2
n
lim n x ( n ) z 1
n
•
Re[z]
1 z lim n x ( n ) R x2
6
Z变换定义,典型序列的Z变换
单:X(z) x(n)zn n0
典型序列的Z变换
双:X(z) x(n)zn n
• 单位样值序列 • 单位阶跃序列 • 斜变序列 • 指数序列 • 正弦余弦序列
2021/8/2
7
典型序列的Z变换
(1 ) Z[T (n) ] (n)z n1(z0 )
n 0
(2) ZT [ (n m)] (n m) z n n0
2021/8/2
10
余弦序列的 Z 变换
ZT
[e j 0n ]
z z e j 0
ZT
[e j 0n ]
z z e j 0
ZT [cos 0 n ] ZT [( e j 0 n e j 0 n ) / 2 ]
( z
Z变换的引入(也可直接定义)

Ω = 2πf
σT
z = e sT = eσT e jΩT r =e
ω = ΩT
x(n)e− jωn ∑
+∞
r=1时, 序列的z变换即为序列的傅立叶变换,
X ( z) z =e jω = X (e jω ) =
n=−∞
Nankai University, CY LI,
2012-4-17
7
Biomedical signal processing
^
X ( z)
z = e sT
1 ∞ 1 ∞ 2π = ∑ X ( s − jkΩ s ) = ∑ X ( s − j k) T k =−∞ T k =−∞ T
2012-4-17 13
Nankai University, CY LI,
Biomedical signal processing
z变换的收敛域(ROC)
系统的差分方程:
k=0 r=0 N M
y(n)= ∑a(k) y(n − k) + ∑b(r)x(n − r)
k=1 r=0
N
M
系统的转移函数:
Y ( z) H ( z) = = X ( z)
∑ b( r ) z
r =0 N k =1
M
ቤተ መጻሕፍቲ ባይዱ−r
1 + ∑ a(k ) z −k
=k
∏ (z − z
m =1 N k =1
s = σ + jΩ
1 2π j
∫ σ
X ( s )e st ds
− j∞
1 1 L[e ] = (singleside) L[u(t )] = s+a s
Nankai University, CY LI, 2012-4-17 4
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验九 Z 变换实验报告离散时间信号][n x 的双边z 变换∑∞-∞=-=n nzn x z X ][)(,是时间傅立叶变换的推广,而离散时间傅立叶变换在研究离散时间信号与系统中是很有用的。
然而,存在双边z 变换的信号要比存在离散时间傅立叶变换的信号范围广得,并且双边z 变换对理解对理解稳定和不稳定系统都是有用的。
对于一大类信号来说,z 变换能表示成以z 为变量的两个多项式之比,即)()()(z D z N z X =,这些变换称为有理变换,而且在作为满足线性常系数差分方程的LTI 系统的系统函数中常常遇到。
)(z N 和)(z D 分别称作分子和分母多项式,多项式)(z N 和)(z D 的根分别称为该系统的零点和极点,除了一个常数因子外,它们决定了具有有力变换的LTI 系统的特性行为。
因此,能够用这些极点和零点的位置的图来分析系统性质。
注意,这一张都用Ω作为连续时间频率的变量,ω作为离散时间频率变量。
§9.1 作离散时间零极点图目的:学习如何将一个离散时间有理系统函数)(z H 的零极点展现一张零极点图。
相关知识:有理系统函数的零极点可以用roots 计算出来。
函数roots 要求系数向量是以自变量的递降次序设定的。
例如,考虑系统函数23)(22++-=z z z z z H 的LTI 系统,执行以下命令就能算出它的零极点: >> b=[1 -1 0]; >> a=[1 3 2]; >> zs=roots(b) zs = 0 1 >> ps=roots(a) ps = -2 -1常常希望将离散时间系统函数写成1-z 升阶次序。
这些多项式的系数是很容易由线性常系数差分方程得到的,并且也是filter 或freqz 要求的形式。
然而,如果分子和分母多项式具有不同阶次,那么在0=z 的零点或极点有可能被漏掉。
例如,(9.3)式可以重新写作2112311)(---++-=z z z z H (9.4)如果要从(9.4)式得到这些系数就会得到 >> b=[1 -1]; >> a=[1 3 2]; >> zs=roots(b) zs = 1 >> ps=roots(a) ps = -2 -1应注意,在0=z 的零点这里没有出现。
当用1-z 的形式表示系统函数时,为了求得完全的零极点集合,就必需要对这个较低降次多项式的系数向量补上零以使向量具有相同的长度。
下面的练习需要用到函数plotdpz ,其具体实现如下。
函数plotdpz(b,a)画出离散时间系统的零极点。
plotdpz 的输入和filter 具有相同的格式,并且如果分子和分母多项式不是同阶次的话,plotdpz 将自动的对a 或b 补上适当个数的零。
同时,plotdpz 在图中还包括单位圆,以及如果在单位圆内有多于一个零点或极点的话,还会指出极点或零点的数目。
function plotdpz(b,a) la=length(a); lb=length(b); if (la>lb)b=[b zeros(la-lb)]; elseif (lb>la)a=[a zeros(lb-la)]; end ps=roots(a); zs=roots(b);mx=max(abs([ps'zs'.95]))+.05; clg;axis([-mx mx -mx mx]);axis('equal');hold on;w=[0:.01:2*pi];plot(cos(w),sin(w),'.');plot([-mx mx],[0 0]);plot([0 0],[-mx mx]);text(0.1,1.1,'Im','sc');text(1.1,.1,'Re','sc');plot(real(ps),imag(ps),'X');plot(real(zs),imag(zs),'o');numz=sum(abs(zs)==0);nump=sum(abs(ps)==0);if numz>1text(-.1,-.1,num2str(numz));elseif nump>1text(-.1,-.1,num2str(nump));endhold off基本题1.用plotdpz画出(9.3)或)H的零极点图。
(z2.用plotdpz画出满足差分方程]ynynn-+-y=+的滤波器的零极点图。
[]2[5.0]1[n][x3.用plotdpz画出满足差分方程--nx+---n=yynyn+nynx25]3[[-[]]1[5.0.0125]2.1]]1[[75.0所描述滤波器的零极点图。
答案:9.1做离散时间零极点function plotdpz(b,a)la=length(a);lb=length(b);if (la>lb)b=[b zeros(la-lb)];elseif (lb>la)a=[a zeros(lb-la)];endps=roots(a);zs=roots(b);mx=max(abs([ps;zs;.95]))+.05; clg;axis([-mx mx -mx mx]);axis('equal');hold on;w=[0:.01:2*pi];plot(cos(w),sin(w),'.');plot([-mx mx],[0 0]);plot([0 0],[-mx mx]);text(0.1,1.1,'Im','sc');text(1.1,.1,'Re','sc');plot(real(ps),imag(ps),'X');plot(real(zs),imag(zs),'o'); numz=sum(abs(zs)==0);nump=sum(abs(ps)==0);if numz>1text(-.1,-.1,num2str(numz)); elseif nump>1text(-.1,-.1,num2str(nump)); endhold off第一题%第一题clc;clear;close all;b=[1 -1 0];a=[1 3 2];plotdpz(b,a);grid on;title('H(z)的零极点分布');%第二题b1=[1 0];a1=[1 1 0.5];figure;plotdpz(b1,a1);grid on;title('差分方程滤波器的零极点分布图'); %第三题b2=[1 0.5 0];a2=[1 -1.25 0.75 -0.125];figure;plotdpz(b2,a2);grid on;title('差分方程滤波器的零极点分布图');§9.2离散时间频率响应的几何解释这个练习要说明如何从系统函数零点和极点位置的几何考虑,计算离散时间系统频率响应的幅值和相位。
回想一下,系统函数可以因式分解成如下形式;∏∏==--=Mm m Kk kpz zz Az H 11)()()( (9.5)式中k z 是)(z H 的零点,m p 是)(z H 的零点。
每个极点和每个零点对)(ωj e H 的贡献取决于该极点或零点到ωj e 的向量长度。
对(7.5)式取幅值,并在ωj e z =上求值可得∏∏==--=Mm mjKk kjj pe ze Ae H 11)(ωωω (9.6)因此,总频率响应的幅值是常数A 的幅值乘以全部零点向量长度的乘积再除以全部极点向量长度的乘积。
相类似,每个极点或每个零点对频率响应相位)(ωj e H ∠的贡献就是极点或零点和ωj e 点之间的向量对实轴所形成的相角。
取(9.5)式的相位就是 ∑∑==-∠--∠+∠=∠Mm m jKk k j j pe z eA eH 11)()()(ωωω(9.7)据此,总相位就是常数A 的相位加上由零点贡献的相角之和再减去由极点贡献的相角之和。
下面的习题将提供以这种方式解释零极点图的实践,以求得系统的频率响应。
基本题对于这些题将考察一个简单的二阶离散时间系统,其系统函数是 9.0 81.09.011)(211>+-=--z zzz H1.定义b1和a1包含按filter 要求格式的)(1z H 分子和分母多项式的系数,按10.1节所介绍的方法求出并画出)(1z H 的零极点图。
2.定义omega=[0:511]*pi/256和unitcirc=exp(j*omega)得到在单位圆上512等分点,在这些点上将要对频率响应)(1ωj e H 求值。
定义polevectors1是一个2×512的矩阵,其中每一行包含一些复数,这些复数是由unitcirc 的相应列减去一个极点位置得到的。
如果ps1是一个列向量,它包含了极点的位置,那么就能用下列命令来完成>> polevectors1=ones(2,1)*unitcirc-ps1*ones(1,512);在MA TLAB 中总是愿意用矩阵和向量运算,因为MA TLAB 几乎总是计算矩阵运算比用for 循环构成的运算要快。
用abs 和atan2定义polelength1和poleangle1作为polevectors1中每一元素的幅值和相位。
3.类似于polevecters1定义zerovectors1,使得它是2×512的矩阵,其中包含从零点位置到unitcirc 元素的向量。
定义zerolength1和zeroangle1分别是这些向量的幅值和相位。
4.画出polelength1和zerolength1对omega 的图。
根据这些图,你预计)(1ωj e H 在哪里有最大值和最小值?5.用polelength1和zerolength1计算)(1ωj e H ,并将这个结果存入geonH1mag 中。
用poleangle1和zeroangle1计算)(1ωj e H ∠,并将这个结果存入gemoH1phase 中。
在定义geonH1mag 和gemoH1phase 时,你或许会发现prod 和sum 是很有用的。
画出从几何上到处的幅值和相位,并将它和经由下面计算所得结果比较: >> H1=freqz(b1,a1,512,'whole'); 你在4中估计的峰值频率正确吗? 中等题下面这些题的第一组将考查移动)(1z H 一个零点的效果。