基于视觉对比度机制的红外小目标检测
基于图像融合技术的红外小目标检测

硕士研究生学位论文新疆大学论文题目(中文):基于图像融合技术的红外小目标检测论文题目(外文):Infrared Small Target Detection Basedon Image Fusion Technology 研究生姓名:张国峰学科、专业:工学、信息与通信工程研究方向:目标检测与跟踪导师姓名职称:艾斯卡尔·艾木都拉教授论文答辩日期2019年6月3日学位授予日期2019年6月15日摘要红外小目标的捕获与跟踪在红外精确制导、遥感、空间探测和航空导航等领域有着广泛的应用。
然而,应用环境有时会迫使我们将成像系统与目标保持一定的距离,从而导致在摄像机的视野中出现较小的目标。
同时,由于红外成像设备的抖动、成像设备的噪声等因素,微弱目标信号被淹没在复杂的背景中。
还有隐身战斗机等向空中辐射的电磁信号越来越微弱,采用反射目标的回波来搜索和定位的雷达等探测设备已不能满足现实的需求。
这些存在的问题致使红外图像序列中微弱小目标检测与跟踪工作变得更加困难和具有挑战性。
红外热成像技术由于良好的隐蔽性能,全天候昼夜成像的特点、机动性好、配置方便,非常有利于搭载在预警和无人机上。
监视系统要是能在早期识别敌方目标,然后锁定目标并跟踪,这样可以给面目标跟踪识别阶段省去检测这一环节而大大延长己方防空系统的反应时间,亦或在面目标阶段二次检测目标,降低检测的虚警概率,并向防空系统发出报警。
因此,设计一种鲁棒的红外小目标检测算法具有重要的现实意义和实用价值。
本文在前人基础上设计出了两种不同的小目标检测算法:分别是量子遗传算法和局部对比增强的小目标检测和基于双边滤波下局部强度与梯度融合的小目标检测。
一种是利用量子遗传算法优化和获取结构元素,针对不同的背景等起伏边缘构造相应的结构元素进行形态学滤波,然后局部对比增强小目标能量,最后采用阈值分隔技术提取小目标。
另一种检测算法在杂波抑制上选用双边滤波技术,目的是考虑空间邻域信息和灰度相似特性,达到降噪去噪保留边缘的目的。
基于图像处理技术的红外小目标的检测与跟踪

对于低慢小目标的侦测和处理对策--基于图像处理技术的红外小目标的检测与跟踪摘要:验证了一种基于红外小目标视频图像序列的跟踪算法,主要研究了基于形心计算的跟踪方法和基于kalman滤波器多帧数据关联方法的跟踪法。
分别仿真验证,并从实现结果出发得出了两种算法的适用范围和各自存在的不足。
0 引言随着近十几年信息技术的飞速发展,计算机硬件的处理能力不断提高,存储成本大幅下跌,一些研究人员开始重点研究计算机视觉中有关运动的问题。
与处理单幅图像相比,图像序列引入了新的时间维以及时间相关性约束,这一额外的约束激发了人们对视频理解的研究.视频序列目标跟踪是指对传感器摄取到的图像序列进行处理与分析,一旦目标被确定,就可获得目标的特征参数选择。
由于视频跟踪具有广泛的应用范围,因而引起了世界范围内广大研究者的兴趣。
在1996年至1999年间,美国国防高级研究项目署(DARPA)资助卡内基梅隆大学、戴维SARNOFF研究中心等著名大学和公司合作,联合研制视频监视与监控系统VSAM,主要研究目的是开发用于战场及普通民用场景的自动视频理解技术。
DARPA在2000年又资助了重大项目HID计划,其任务是开发多模式的监控技术以实现远距离情况下人的检测、分类和识别,以增强国防、民用等场合免受恐怖袭击的保护能力。
在2008年,DARPA资助了一项研究实时流视频监视的技术。
国内许多研究所和大学也投入了大量的精力致力于图像跟踪的研究。
如清华大学人机交互与媒体集成研究所在人脸跟踪、视觉监控、等方面取得了许多科研成果;北京自动化研究所模式识别国家重点实验室在交通场景监控、人体跟踪、智能轮椅手势导航等领域进行了深入研究。
1 设计背景视频序列目标跟踪是指对传感器摄取到的图像序列进行处理与分析,充分利用传感器采集得到信息来对目标进行稳定跟踪的过程。
一旦目标被确定,就可获得目标的位置、速度、加速度等运动参数,进而获得目标的特征参数。
运动分析的目的是根据运动线索揭示关于环境有价值的信息,这些信息可以用来执行更高级的视觉任务,如活动识别、视觉检索等。
红外图像中弱小目标检测技术研究

红外图像弱小目标检测技术研究1、本文概述随着技术的不断进步,红外成像技术已成为现代军事、航空航天、民用安全等领域不可或缺的重要工具。
特别是在夜间或弱光条件下,红外成像技术以其独特的成像方法实现了对目标的清晰观察和识别。
在实际应用中,红外图像往往含有大量的噪声和干扰,使得弱目标的检测异常困难。
研究红外图像弱小目标检测技术具有重要的现实意义和应用价值。
本文旨在探索红外图像弱小目标检测技术的相关理论和方法。
我们将分析红外图像的特征,以了解红外图像中弱小目标的特征和困难。
我们将回顾现有的弱目标检测算法,包括基于滤波的方法、基于背景抑制的方法和基于多帧融合的方法等,并分析其优缺点和适用场景。
接下来,我们将提出一种基于深度学习的弱目标检测算法,该算法通过从红外图像中提取和分类深度特征来实现对弱目标的精确检测。
我们将通过实验验证所提出算法的有效性,并将其与其他算法进行比较,为红外图像弱小目标检测技术的发展提供参考和启示。
2、红外图像弱小目标检测技术综述红外图像弱小目标检测技术是识别、提取和跟踪复杂背景下弱目标的重要技术。
由于红外图像中弱目标的信噪比低、对比度低、体积小、运动轨迹不确定等特点,其检测成为一项极具挑战性的任务。
近年来,随着红外成像技术和信号处理技术的快速发展,红外图像中的弱小目标检测技术也受到了广泛的关注和研究。
红外图像弱小目标检测技术的核心在于如何有效地从复杂背景中提取目标信息。
这通常涉及多个阶段,如图像预处理、对象增强、对象提取和对象跟踪。
在图像预处理阶段,主要目的是去除图像中的噪声,提高图像质量,为后续的目标检测提供良好的基础。
在目标增强阶段,使用直方图均衡和对比度增强等各种算法来提高目标与背景之间的对比度,从而突出目标信息。
在目标提取阶段,采用阈值分割、边缘检测、形态学处理等方法从增强图像中提取目标区域。
在目标跟踪阶段,通过滤波算法、匹配算法等实现对目标的连续跟踪。
目前,在红外图像中微弱小目标的检测方面取得了重大进展。
红外小目标检测 报告
红外小目标检测方法概述1110540103 李方舟1.什么是红外小目标?关于小目标”的定义,目前没有统一的定论。
一般认为,当红外成像的距离较远时,在成像平面上只占几个或几十个像素的面积,表现为点状或斑点状,对比度和信噪比较低的目标,即可称之为小目标。
2.为什么要进行红外小目标检测?红外成像具有距离远,隐蔽性高,抗干扰能力强,穿透烟尘,雾以及阴霾的能力强,可全天候,全时间工作等优点。
因此被广泛应用于监视侦察以及导航等军事领域,成为现代精确制导武器的主要技术之一。
在尽可能远的距离上检测并跟踪到敌方目标,以争取在有利的时机发动攻击。
是决定现代战争胜负的重要因素。
距离越远,目标成像面积越小,图象质量越差,对目标的检测和跟踪越困难。
因此,研究小目标的检测和跟踪方法,对提高红外成像系统的作用距离,有着非常重要的意义。
目标检测作为寻的制导系统中的前端处理环节,是精确制导中最为关键和核心的组成部分。
只有及时检测到目标,才能保证如目标的如目标跟踪等后续工作的正常进行。
基于此原因,在红外凝视成像的图像序列中进行目标检测具有相当的难度,几乎所有的小目标检测法都致力于增强图像的信噪比,积累目标能量,以提高目标检测能力。
3.红外小目标检测方法分析对于红外目标的检测问题,目标的一些先验信息,如目标的形状、大小,目标灰度变化在时间上的连续性,以及目标运动轨迹的连续性等是有效分割目标和噪声的关键。
目标检测方法根据这些特性的使用顺序不同,可分为两大类:先检测后跟踪( D e t e c t B e f o r e T r a c k ,D B T )方法和先跟踪后检测( T r a c k B e f o r e D e t e c t ,T B D )方法。
3.1 DBT检测方法基于先检测后跟踪的目标检测技术属于一类经典的红外目标检测。
该类方法分为两步:首先根据目标形状,强度等特性,在单帧图像中检测出候选目标,然后根据实际需要,在分割后的二值化图形序列中,通过序列图像投影到目标轨迹。
结合视觉注意力机制基于尺度自适应局部对比度增强的红外弱小目标检测算法

结合视觉注意力机制基于尺度自适应局部对比度增强的红外弱小目标检测算法沈旭;程小辉;王新政【摘要】如何在没有先验信息的情况下从复杂噪声背景下快速检测到远距离进入的弱小目标,提高整个装备系统的响应能力,是目前IRST热门研究课题.本文通过引入视觉注意机制,提出了一种结合尺度自适应的局部对比度测量的红外弱小目标检测方法.本文首先采用拉普拉斯金字塔尺度空间理论对所有像素点局部对比度进行分析,获得对应的自适应尺度信息;然后在跳出效应的基础上设计了一种基于改进的局部对比度测量模型,最终生成一个显著图来突出目标特性,该方法能够在增强目标对比度同时,抑制背景杂波.定性定量实验结果表明,本文提出的方法相比于对比算法具有较高的红外小目标检测性能,能够对对比度不低于5%的目标稳定检测,适合防空武器装备工程应用.【期刊名称】《红外技术》【年(卷),期】2019(041)008【总页数】8页(P764-771)【关键词】目标检测;视觉注意;尺度感知;对比度测量;跳出效应【作者】沈旭;程小辉;王新政【作者单位】岭南师范学院信息工程学院,广东湛江 524048;桂林理工大学信息科学与工程学院,广西桂林 541004;桂林理工大学信息科学与工程学院,广西桂林541004【正文语种】中文【中图分类】TN219红外搜索与跟踪系统(infrared search and track, IRST)是现代战争中不可或缺的关键系统之一,广泛应用于精确制导、光电预警、防空反导等领域[1-2]。
与雷达系统相比,IRST是一种被动探测设备,具有隐蔽性好,精度高,尤其是“对低慢”目标具有较高的探测精度,可以感知远距离的弱小目标[3]。
与可见光系统相比,IRST具有较远的探测距离与抗干扰能力,能够发现隐藏在云层后面的目标[4]。
现役的武器装备大多是集成了雷达、红外与可见光系统,通过各系统的互补配合,提高整个系统的精度与响应时间。
在没有先验信息的情况下从复杂噪声背景下检测出弱小目标是IRST系统中一项关键技术,该技术可以快速检测到远距离进入的目标,提高整个装备系统的响应能力[5]。
红外弱小目标检测技术综述

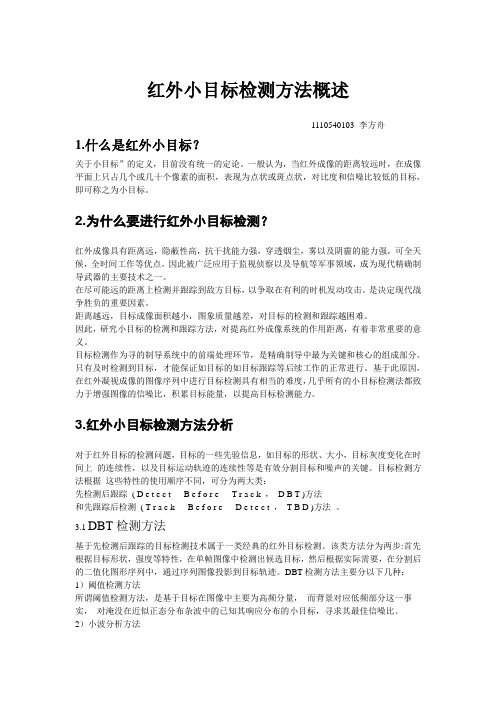
㊀第52卷第2期郑州大学学报(理学版)Vol.52No.2㊀2020年6月J.Zhengzhou Univ.(Nat.Sci.Ed.)Jun.2020收稿日期:2019-12-04基金项目:国家自然科学基金项目(61903340);河南省教育厅重点项目(19A413002);河南省博士后科研项目(001701002);河南省青年人才托举工程项目(2020HYTP028)㊂作者简介:任向阳(1992 ),男,河南漯河人,博士研究生,主要从事图像处理㊁红外弱小目标检测研究,E-mail:xyren199201@;通信作者:马天磊(1989 ),男,河南新乡人,讲师,主要从事图像处理㊁红外弱小目标检测研究,E-mail:tlma@㊂红外弱小目标检测技术综述任向阳,㊀王㊀杰,㊀马天磊,㊀朱晓东,㊀白㊀珂,㊀王佳奇(郑州大学电气工程学院㊀河南郑州450001)摘要:随着红外探测技术的不断发展,对探测距离的要求越来越高,红外弱小目标检测技术已成为国内外红外探测领域的研究重点㊂简介了红外弱小目标检测的背景及意义;重点综述了目前在红外弱小目标检测领域中各类典型方法的研究现状及最新进展;给出了几种不同类型的红外弱小目标检测方法的实验对比;最后对红外弱小目标检测技术的研究进行总结和展望㊂关键词:红外弱小目标;目标检测;红外图像;检测性能中图分类号:TP391.4㊀㊀㊀㊀㊀文献标志码:A㊀㊀㊀㊀㊀文章编号:1671-6841(2020)02-0001-21DOI :10.13705/j.issn.1671-6841.20195570㊀引言自然界中,物体温度高于绝对零度时,都会持续向外界辐射红外波段能量[1-2]㊂物体具有越高的温度,则其向外辐射的红外能量就越大[1,3]㊂红外探测技术就是以红外目标监测系统为载体,利用被检测目标与背景之间红外辐射的差异实现目标检测和识别[4]㊂与传统的主动雷达成像以及可见光成像等探测技术相比,红外探测技术具有一系列的独特优势:1)红外探测技术隐蔽性好㊂主动雷达成像探测需要向外界发射电磁波而容易暴露自身的信息,红外成像探测则属于被动探测,不需要向外界发送信号㊂2)红外探测技术可以全天候工作㊂可见光成像探测器只能在白天进行探测工作,而红外成像探测器不受白天夜晚的限制,可实现昼夜工作㊂3)红外探测技术抗干扰能力强㊂主动雷达成像探测的效率容易受到目标表面隐形吸波材料的吸收而削弱;可见光成像探测很容易被云层㊁烟雾等因素干扰,并且容易被不同的伪装手段欺骗㊂随着雷达隐形技术以及伪装技术的发展,主动雷达成像探测与可见光成像探测往往难以满足一些实际的探测需求,而红外成像探测则可以更好地穿透烟雾㊁云层等干扰,并且有一定识别伪装目标的能力,同时不会被各种雷达隐形吸波材料所影响㊂因此,红外探测技术可以对传统探测手段进行有效补充甚至可以替代传统的探测技术㊂随着红外探测技术的发展,该技术已在不同的领域中得到广泛应用[4-6]㊂在民用领域,已被广泛地应用于火灾预警[7-8]㊁气体泄漏检测[9-10]㊁医学特征识别[11-12]㊁农业生产[13-15]等方面㊂而在更为重要的军事领域,红外探测技术已被广泛应用于侦察㊁制导㊁预警等方面[16-19]㊂例如:美国的天基红外预警系统和国防支援计划导弹预警卫星系统[20]㊁俄罗斯的 凤凰 系统㊁荷兰等国的 天狼星 系统[21]㊁以色列的 云雀 无人侦察机㊁美国的 全球鹰 无人侦察机[22]等均使用到了红外探测技术[23]㊂对于红外探测系统来说,当被检测目标与探测器之间的距离达到十几甚至几十公里时,在大气扰动㊁光学散射和衍射等外界因素的影响下,经过光学系统成像后,红外图像中的目标呈现 弱 和 小 的特征㊂此时红外探测已进入红外弱小目标探测的范围㊂其中 弱 这个特征主要是目标的信噪比以及目标与背景的对比度较低; 小 这个特征则主要是目标在整幅红外图像上所占有的像素数少㊂因此,在检测过程中,由于弱小目标尺寸比较小,不具有相应的形状以及纹理特征,同时在实际场景中,复杂多变的云㊁建筑物㊁海面等郑州大学学报(理学版)第52卷干扰物的面积较大,导致被检测的小目标很容易会被复杂的场景形成的杂波所淹没[3]㊂此外,目前红外弱小目标检测方法的稳健性㊁鲁棒性㊁实时性还不能完全满足不同应用背景的需求㊂因此,红外弱小目标检测技术成为近年来在民用和军事领域里的研究热点之一[4]㊂1㊀红外弱小目标检测技术的研究现状红外弱小目标检测技术是红外探测系统的关键技术之一,是红外探测领域的研究热点[24-26]㊂国内外有许多的相关机构开展了红外弱小目标检测技术的研究工作,并取得了丰硕的研究成果[26-28]㊂同时,有许多国内外的刊物和会议也经常发表和探讨一些弱小目标检测技术的研究成果[27-30]㊂1.1㊀红外弱小目标成像的数学模型在红外成像的过程中,由于受大气散射㊁折射㊁镜头污染㊁光学散焦㊁镜头变形等影响,远距离目标被红外探测器接收时,信号强度表现为弱小的特点[5]㊂根据国际光学工程学会(society of photo-optical instrumenta-tion engineers,SPIE)的定义,把面积不大于9pixelˑ9pixel大小的红外目标称为红外小目标[1,3,4]㊂如图1所示,图1(a)为一幅真实场景的红外图像,该图像的大小为256pixelˑ318pixel㊂为了能够清晰地显示小目标,对该图像中弱小目标的局部区域进行放大,并调节其对比度,图1(b)为弱小目标及其邻域的放大图,其大小为31pixelˑ31pixel㊂图1(c)代表弱小目标及其邻域的三维分布图㊂通过观察可知:图中弱小目标为中心对称㊁向四周辐射的形状,与二维高斯函数非常相似㊂很多学者都使用二维高斯函数对弱小目标进行建模[1,3,4],模型为f T(x,y)=A㊃exp{-12[(x-xcϑx)2+(y-y cϑy)2]},式中:ϑx和ϑy为横向和纵向的尺度参数;A为目标的灰度幅值;fT(x,y)为该弱小目标的空间分布灰度函数;(x c,y c)为红外小目标的空间坐标㊂图1㊀实际红外图像中的弱小目标及其三维强度图Figure1㊀A small target in an infrared image and its3D intensity distribution 在红外弱小目标检测中,根据对小目标检测时进行图像处理所需数据量的差异,可将这些检测方法分为两大类,即基于单帧的检测方法和基于多帧的检测方法[31]㊂基于单帧的弱小目标检测方法通过处理单帧图像来检测目标,并从单帧检测结果中给出目标存在与否的判决;基于多帧的弱小目标检测方法则同时处理多帧图像,将多帧图像全部处理后,给出目标存在与否的判决结果[32-33]㊂本文以这两类方法为主线,介绍其中的代表性检测方法㊂1.2㊀基于单帧图像的弱小目标检测方法基于单帧图像的弱小目标检测方法主要利用单帧图像的空间信息对小目标进行检测㊂现有的基于单帧图像的弱小目标检测方法主要分为三种:第一种是从目标角度出发,根据目标和周围背景在单帧红外图像中的灰度㊁结构等特征差异,设计检测算子,直接提取目标[34];第二种是从图像背景角度出发,采用相应方法抑制图像的背景,从而实现弱小目标的检测[35-36];第三种是基于图像数据结构的方法,这种方法主要是通过查找低维子空间结构以及使用预设的超完整字典来显示数据结构,从而实现小目标的检测[37-38]㊂本文主要针对几种比较有代表性的单帧检测方法进行介绍㊂1.2.1㊀基于目标特征的弱小目标检测方法㊀基于目标特征的弱小目标检测方法是根据目标和其邻域在单帧红外图像中的特征差异,设计不同方法凸显小目标并抑制背景杂波,从而实现弱小目标的检测㊂23㊀第2期任向阳,等:红外弱小目标检测技术综述1)基于视觉对比机制的弱小目标检测方法基于视觉对比机制的弱小目标检测方法是近几年才出现的一种新颖的弱小目标检测方法㊂由于人类的视觉系统(human visual system,HVS)在处理目标检测任务时表现出非常良好的鲁棒性[39-42],所以,有关视觉系统中的一些理论机制也被引入到弱小目标检测中来[43-44]㊂在此类方法中,视觉对比机制较多地被用于研究弱小目标检测[45]㊂对比机制一般被认为是信号在某个局部区域中存在信息差异,如小目标与其邻域之间存在着各种不同的差异㊂在人类视觉系统中,这些差异对于认知外界事物具有非常重要的意义[46]㊂根据小目标灰度强于邻域灰度的特征,Chen等[47]基于视觉对比机制提出了一种局部对比测量方法(local contrast measure,LCM)㊂该方法主要是利用小目标的灰度值一般会比邻域的灰度值更大一些的特点㊂此后,Han等[48]发现LCM存在过增强噪声点的现象,并提出了一种改进的局部对比测量方法(improved LCM,ILCM)㊂该方法采用了HVS大小自适应过程和注意力转移机制,有效地降低了噪声点过增强现象的发生,但该方法容易把小目标变得平滑㊂为了较好地保留小目标的形状,王晓阳等[49]提出一种区域局部对比度方法,该方法利用了图像信息熵和局部相似性等信息,对小目标的原始形状保留效果较好,但在复杂场景中,区域局部对比度方法不是非常有效㊂为了提高在复杂场景的检测率,Qin等[50]提出了一种新颖的局部对比度测量(novel local con-trast measure,NLCM)方法㊂不同于ILCM使用近似于小目标尺寸的滑动窗口,NLCM使用尺寸大于小目标的局部区域作为滑动窗口,这更有利于在复杂场景中增强目标和背景的对比度㊂为了进一步提高方法的检测性能,Du等[51]提出了一种同质加权局部对比度测量方法(homogeneity-weighted local contrast measure, HWLCM)㊂该方法能够充分利用中心和周围区域的局部对比特征以及周围区域的加权均匀性特征㊂这些特征的使用有利于增强目标强度和抑制复杂背景㊂由于LCM方法被提出时间并不是很长,仍有许多学者对该类方法进行研究和改进[52-56],例如:多尺度块的对比测量(multiscale patch-based contrast measure,MPCM)[52]㊁多尺度局部同质测度(multiscale local contrast measure,MLCM)方法[53]㊁相对局部对比测量(relative local contrast measure,RLCM)方法[54]㊁局部差异量度(local difference measure,LDM)[55]㊁改进的LCM[56],等等㊂在计算局部对比度时,LCM及其改进方法大多使用的是比率形式定义㊂这些方法先计算图像中某局部中心与其邻域之间的比率作为增强因子,然后将增强因子与局部中心值的乘积作为局部对比度[54]㊂除了上述使用比率形式定义计算局部对比度的方法之外,许多方法还使用了差异形式定义,即使用图像中的某局部中心以及邻域之间的差异结果作为局部对比度[57-58]㊂这类方法中较为典型的是由Kim等[59]提出的拉普拉斯-高斯算子(Laplacian of Gaussian,LoG)㊂该算子可以有效地提高被检测弱小目标与其周围区域之间的对比度,从而实现目标的检测㊂针对该方法在具有比较复杂的背景杂波时容易产生虚警的问题,一种局部定向LoG算子被提出[60]㊂该方法首先将LoG滤波器分解为具有4个方向的局部LoG滤波器;然后使用局部LoG滤波器生成的内核对图像进行卷积;最后,通过最小滤波器获得最终的空间滤波图像㊂这种方法可以有效地提高检测率并消除云边缘带来的虚警㊂此外Shao等[61]在结合形态学操作的基础上,对LoG算子进行改进,也取得了良好的小目标检测结果㊂2)基于局部强度和梯度的弱小目标检测方法基于局部强度和梯度的弱小目标检测方法是受到小目标在图像分布中呈现高斯形状的启发,从强度和梯度的角度对小目标的局部属性进行描述,以增强目标并抑制图像中的杂波[62]㊂在红外图像中,小目标像素的灰度值大于其局部相邻像素的值;另外,小目标可使用二维高斯函数模拟,二维高斯函数形成标量场,其梯度场表现为梯度向量指向中心的特点,同理,小目标具有灰度标量场,其梯度场也表现为梯度向量指向目标中心的特点㊂这两个属性分别被认为是局部强度属性和局部梯度属性㊂均匀背景可以通过使用局部强度属性来抑制,因为它们的强度值几乎相同;对于具有强边缘的背景,它们的梯度方向通常是一致的,不同于分布中目标的梯度㊂基于这两个属性,通过计算原始红外图像局部强度和梯度(local intensity and gradient, LIG)图,可以实现目标增强和杂波抑制㊂1.2.2㊀基于背景特征的弱小目标检测方法㊀根据背景抑制方式的不同,基于背景特征的弱小目标检测方法主要分为两类:基于空域滤波的方法和基于变换域滤波方法㊂1)基于空域滤波的方法首先通过估计图像的背景信号,然后利用原始图像与估计得到的图像背景进行4郑州大学学报(理学版)第52卷差分运算,最后在差分图像中使用阈值分割方法实现弱小目标的检测㊂其中实现图像背景估计的步骤如下:首先在图像中取每个像素点对应的局部区域,然后利用此局部区域上的灰度信息对该像素点的背景强度值进行估计,最后对图像上所有的像素点进行遍历从而获取图像背景的预测图㊂传统基于空域滤波的方法有最大中值\最大均值(max-mean\max-median)滤波器的方法[63]㊁二维最小均方(two-dimensional least mean square,TDLMS)滤波器的方法[64-67]㊁数学形态学方法[68-71]㊁双边滤波器[72-73]㊁高通模板滤波方法[3-4]㊁中值滤波方法[3-4]等等㊂A)Max-mean\max-median方法是一种非线性的滤波方法,该方法在中值滤波方法的基础上,对图像进行滤波后再进行差分运算[63]㊂在处理过程中,当被处理的像素点在目标上时,使用max-mean\max-median 方法所获得的背景预测值近似于该像素点邻域的平均信号强度值㊂而在图像中目标点的信号强度值和其邻域的平均强度值之间具有较大的差异,于是,在原图和预测的背景图进行差分运算后该像素点会具有较大的响应值㊂当被处理的像素点在平缓变化的背景上时,用max-mean\max-median方法所获得的背景预测值与该像素点的灰度值两者之间非常接近,在原图和预测的背景图进行差分运算后该像素点对应的响应值较小㊂当像素点位于景象边缘时,使用max-mean\max-median方法获得的背景预测值为景象边缘上的平均强度值,所以该像素点的强度值与预测值的差异很小,进行差分运算后该像素点对应的响应值也很小㊂因此,max-mean\max-median方法不仅对被检测图像上起伏的背景信号能够有效进行抑制,还可以有效地抑制图像边缘具有的纹理信息,这些抑制有利于后续的弱小目标检测㊂B)1988年,Hadhoud等将应用于一维信号处理领域的LMS(least mean square)方法扩展到二维信号处理领域,提出TDLMS方法[64],并应用于图像去噪以及图像增强㊂考虑到该方法在图像处理领域具有较好的性能,因此该方法被一些学者引入到弱小目标检测中㊂TDLMS方法是一种自适应迭代的方法,该方法首先根据输入图像的内容对模板参数进行自动计算,在每一次迭代过程中求取预测的背景图像与期望图像两者之间的差异并得到误差函数;然后判断误差函数与设定阈值之间的大小,当误差函数数值小于阈值时,停止迭代,并输出经过该方法预测得到的背景图像㊂很多学者在不同特征区域的选取以及模板更新步长参数的自适应确定等方面对这种方法进行了改进[65],例如Bae等[66]为了在背景和小目标区域中自适应地调整步长,通过使用小目标邻域图像块预测像素的方差,来计算与自适应区域相关的非线性步长,该方法取得了较好的检测效果㊂此外,张世璇等[67]提出了一种由背景去除与目标提取构成的两层TDLMS滤波器,该方法根据图像的统计参数对步长的大小自适应调整,并迭代得到最优的TDLMS滤波器权值㊂C)1964年Matheron和Serra提出数学形态学(mathematical morphology,MM)的方法,并将该方法应用到了图像分析领域[68]㊂数学形态学方法是一种基于集合理论和几何学的非线性滤波方法㊂数学形态学运算基于两个基本操作:腐蚀和膨胀㊂这两个基本的操作在原始图像和结构元素构成的集合上进行㊂最常用的数学形态学方法是顶帽变换(top-hat transformation,Top-hat)方法[69],该方法首先构造合适的结构元素;然后利用形态学开运算滤除小于结构元素的亮奇异点,同时利用形态学闭运算滤除小于结构元素的暗奇异点,最后使用原始图像与预测的背景图像进行差分处理,得到包含残差和弱小目标的图像㊂在经典的Top-hat方法的基础上,有许多改进的方法被提出,Zhou等[70]设计了一种由系列Top-hat滤波器构成的连续Top-hat滤波器方法,该方法中Top-hat滤波器的结构元素逐渐减小㊂之后,Deng等[71]考虑到自适应结构元素对于Top-hat方法的重要性,提出了一种基于量子遗传方法的自适应Top-hat结构元素优化方法,该方法能够实现更稳定的小目标检测性能㊂D)1998年Tomasi等提出双边滤波器(bilateral filter)的方法,并用于图像去噪㊂由于该方法具有良好的红外图像背景估计能力,被学者们广泛地应用于弱小目标检测领域[72]㊂双边滤波器主要由灰度域滤波核和空间域滤波核这两个不同的高斯滤波核构成㊂在空间域中,滤波核根据像素之间的欧氏距离,对离中心像素更近的像素赋予更大的权重;在灰度域中,滤波核根据像素灰度值之差,与中心像素值更接近的像素赋予更大的权重㊂不同于传统的滤波方法仅仅考虑不同像素在空间位置中的分布,双边滤波方法不仅对像素的空间位置分布进行考虑,还对图像中像素的灰度分布特征进行考虑㊂因此,这种方法能够具有很好的红外图像背景估计性能,并且对于图像背景边缘的特点也有很好的保存性能㊂考虑到该类方法的特点,Bae等[73]提出了一种新颖的基于双边滤波器的目标检测方法,该方法首先根据像素四个方向的边缘分量判断是否存在潜在的小目标;如果判断的结果是存在潜在的小目标,则使用双边滤波器方法对小目标进行模糊处理;之5㊀第2期任向阳,等:红外弱小目标检测技术综述后将原始的红外图像与通过双边滤波器方法得到的预测图像进行差分处理,从而实现对小目标信号的提升㊂2)相比于具有较低计算复杂度的空域滤波的方法,变换域方法计算复杂度较高㊂但是近年来随着相关计算设备性能的提升,一些基于变换域滤波的方法也在工程实践中被证明具有良好的背景抑制性能[74]㊂基于变换域滤波的方法首先使用相应的变换方法获取红外图像的变换域信息,然后在变换域中处理获取的信息,最后使用逆变换的方法将变换域中的图像变换至空间域,从而得到相应的结果㊂A)经典的频域滤波方法首先通过傅立叶变换方法[75]将图像变换到频域中,然后在保护目标相关特征的同时,对其进行高通滤波㊂最后,经过逆变换获得背景抑制后的红外图像㊂这种方法可以有效地抑制变化比较缓慢的背景,同时能够保留弱小目标㊁景象边缘以及图像中的随机噪声㊂常见的频域弱小目标检测方法主要有理想高通滤波[76]㊁巴特沃斯高通滤波[77]等㊂B)小波变换滤波方法考虑到红外图像中背景对应的辐射强度小于目标区域对应的辐射强度,同时弱小目标与周围背景灰度不连续㊂因此,在检测小目标的过程中,小目标可以被认为是红外图像的高频部分,而图像的背景则可以被认为是红外图像的低频部分,基于此可以使用小波变换的方法分离红外图像中的高频部分和低频部分,然后分别处理两个不同的部分,从而实现图像信噪比的提升以及对弱小目标的检测[78]㊂常见的小波变换滤波方法主要有基于Countourlet变换的方法㊁基于非下采样轮廓波变换的方法等[4]㊂除了上面几类基于背景特征的检测方法之外㊂随着非局部均值滤波方法(non-local means denoising, NLM)在图像去噪领域取得的优异效果,该方法被引入到了小目标检测领域中[79-80]㊂NLM的主要思想是使用与评估像素具有相似邻域结构的像素加权平均值来替换评估像素[79]㊂基于NLM的方法使用相同的原理来寻找相似的局部块,并对图像背景进行估计㊂在这类方法中,非局部检测(detection by NL-means, D-NLM)是一种典型的方法,该方法首先寻找图像的相似块,并根据分析忽略相似块中两个最不相似的像素来修改距离度量以便在存在小目标的情况下稳健地估计图像背景㊂在D-NLM的基础上,文献[81]提出一种基于块匹配和三维滤波以及高斯混合匹配滤波器(detection by block matching and three-dimensional filtering and Gaussian mixture matched filter,DBM3D+GMMF)的方法,该方法基于块匹配和三维滤波方法的输出值来估计图像背景的均值[82-83],并结合高斯混合匹配滤波器,最终有效地对红外图像的背景进行估计,成功提取了红外弱小目标㊂1.2.3㊀基于图像数据结构的弱小目标检测方法㊀传统的基于单帧图像的弱小目标检测的基本思路是认为被检测的红外图像由小目标㊁背景以及噪声三个部分组成,通过设计不同的方法实现增强目标信号或者抑制背景和噪声,进而实现弱小目标的检测㊂基于图像数据结构的弱小目标检测方法则主要是根据红外图像中目标的稀疏性和背景的低秩性等不同的结构特点,实现目标图像和背景图像的分离㊂近来,这些基于图像数据结构的方法引起了越来越多的关注[84]㊂基于图像数据结构的方法通常利用以下两种方式来对小目标进行检测[85-86]㊂1)在查找低秩子空间结构的方法中,代表性的是基于红外图像块(infrared patch-image,IPI)模型的方法[87]㊂该方法中,小目标被认为是一个稀疏分量,同时背景被认为是一个低秩分量㊂通过分析图像中背景㊁噪声以及小目标的特点,IPI模型可以表示为min B,T B ∗+λ T 1+12μ I-B-T 2F,式中:I代表红外图像对应的矩阵;T代表小目标矩阵;B代表背景矩阵;λ和μ为给定的参数㊂在该方法中,对小目标的检测被转换成从数据矩阵中恢复两个分量的过程㊂但是IPI方法并未考虑当红外图像背景是较复杂的异构背景的情况㊂此时,单独的子空间很难有效地表示图像中复杂的异构背景㊂为此,Wang等[88]设计了一种稳定多子空间学习(stable multi-subspace learning,SMSL)的方法,该方法将图像的异构背景数据看作是一种多子空间的结构,并提出了一种学习多子空间策略的模型,有效地实现了对小目标的检测,该模型可以表示为min D,a,T㊀ a row-1+λ T 1+12μ I-Dα-T 2F,s.t.㊀D T D=I k㊀∀i,式中:D=[D1,D2, ,D k]表示背景数据空间;α=[α1,α2, ,αk]表示系数;λ和μ为给定的参数;k是子空间维度㊂。
基于视觉对比度机制的红外弱小目标检测算法

;! 引 ! 言
红外弱小目标的准确检测可以实现武器系统精确制导 和对危险目标的早期 预 警'是 红 外 制 导 和 目 标 跟 踪 的 关 键 技术 $ *"B+ 红外成像技术自身具备被动隐 藏)成 像 距 离 远 等 特性'通常用于侦查远距离目标$在长 距 成 像 时'被 测 目 标 在红外图像中占据的像素比较少'缺 乏 可 供 利 用 的 特 征 ' *!+ 导致其检测难度增加$红外传感器在拍摄过程中会伴随出 现高亮像素点噪声'这 类 噪 声 的 亮 度 等 于 或 略 高 于 目 标 像
网 址 @@@&-,-;/%/&8$0
基于视觉对比度机制的红外弱小目标检测算法
蔡 ! 军 黄 袁 园 李 鹏 泽 赵 子 硕 邓 ! 撬
重庆邮电大学自动化学院重庆 !)))=<
!!摘!要针对红外图像中空天海天等复杂背景及像素 点 噪 声 容 易 造 成 检 测 虚 警 的 问 题提 出 一 种 基 于 视 觉 对比度机制的红外弱小目标检测算法首先通过新定义的局部对比度算子获 取 对 比 度 增 强 的 图 像该 步 骤 可 抑 制背景杂波与像素点噪声对检测的干扰提高图 像 的 信 杂 比增 强 目 标 区 域 的 视 觉 显 著 性 然 后利 用 多 尺 度 方 法优化图像的显著区域以增强算法的适用性从 而 实 现 算 法 对 不 同 尺 寸 的 弱 小 目 标 的 有 效 检 测 最 后利 用 自 适应阈值分割方法获取待检测的真实目标实验结 果 表 明该 算 法 无 需 图 像 预 处 理 环 节 即 可 实 现 对 不 同 尺 寸 的 弱 小 目 标 的 鲁 棒 性 检 测 对 比 常 用 算 法 具 有 快 速 性 高 效 性 和 较 强 的 适 用 性
基于局部对比度测量的红外弱小目标恒虚警检测

基于局部对比度测量的红外弱小目标恒虚警检测姚朝霞;谢涛【摘要】A robust and effective small dim object detection algorithm is the key to the success of an infrared tracking system. To help solve practical tracking problems, we propose a small dim infrared object detection algorithm with a high detection rate, a low false alarm rate, and a short processing time. First, using Top-hat filter and adaptive threshold operation based on a constant false alarm rate, original images are pre-processed to obtain the suspected object area, greatly reducing computation time and detection probability, while maintaining a constant false alarm probability. Second, we define a novel and effective local contrast measurement operator, and introduce a local self-similarity measure of a local saliency map, enhancing not only visual saliency, but also improving signal-to-noise ratio. Finally, a simple threshold operation in the saliency map can be used to detect the real object. Many simulation results show that our proposed algorithm is superior to existing detection algorithms in a complex background.%鲁棒有效的弱小目标检测算法是光电跟踪系统成功的关键.本文针对空中远距离红外弱小目标检测的实际问题,在人类视觉对比机制基础上提出了一种检测率高、误报率低、处理时间短的红外小目标检测方法.首先,利用基于恒虚警率的Top-hat滤波和自适应阈值操作对原始图像进行预处理,得到疑似目标区域,该步骤可大大减少计算时间,同时保持恒定的虚警概率和可预测的检测概率;然后,定义了一种新颖有效的局部对比度测量算子,并引入图像局部的自相似性计算局部显著图,该过程不仅可以增强图像目标的视觉显著性,同时还可以抑制噪声,提高区域目标的信噪比;最后,在显著图基础上,利用简单的阈值操作就可以获得真实目标.定性定量实验结果表明,本文提出的方法与4种现有检测算法相比,具有更高的检测率、更低的虚警率和更少的检测时间,是复杂背景下红外弱小目标检测的有效方法.【期刊名称】《红外技术》【年(卷),期】2017(039)010【总页数】6页(P940-945)【关键词】目标检测;弱小目标;恒虚警率;自适应阈值;局部对比度增强;视觉显著图【作者】姚朝霞;谢涛【作者单位】台州职业技术学院机电工程学院,浙江台州 318000;西安交通大学电子与信息工程学院,陕西西安 710049【正文语种】中文【中图分类】TN219众所周知,红外成像技术具有抗干扰、隐蔽性好、全天时、全天候等优点,广泛运用在军事领域和民用领域中,如防空探测、红外制导、广域监控等[1]。
基于视觉注意机制的复杂背景下红外小目标检测

基于视觉注意机制的复杂背景下红外小目标检测马岩;李环【摘要】针对视觉注意机制Itti模型对复杂背景下红外小目标检测易受到图像背景杂波影响,检测结果不理想的情况,对传统算法加以改进,在Itti模型中引入背景预测算子.对图像背景进行预测,与原图像进行差减,以达到突出目标区域的目的,消除背景区域对目标显著性的影响.再提取滤除背景后的图像视觉差异,找出图像的显著性区域,实现对红外小目标的检测.将改进后的模型应用于复杂背景下红外小目标检测中,实验结果表明,相对于传统的Itti模型的检测算法,新提出的算法具有更高的检测率.【期刊名称】《沈阳理工大学学报》【年(卷),期】2014(033)001【总页数】6页(P18-23)【关键词】视觉注意;背景预测;红外图像;小目标检测【作者】马岩;李环【作者单位】沈阳理工大学信息科学与工程学院,辽宁沈阳110159;沈阳理工大学信息科学与工程学院,辽宁沈阳110159【正文语种】中文【中图分类】TP391.4复杂背景下的红外小目标检测技术在红外成像制导、红外预警、目标监视搜索以及目标跟踪中均起着关键作用。
小目标为十几个甚至几个像素,在视场中表现为孤点或斑点。
复杂背景是指图像中的背景区域间差异较大起伏较明显的图像。
在目标检测中引入视觉注意机制,可以快速选择优先处理的区域,降低红外小目标检测的难度。
注意机制分为基于自底向上的数据驱动的注意模型和基于自顶向下的任务驱动的注意模型两种,数据驱动的注意模型由于计算相对简单,运算速度快,因此得到广泛应用。
基于数据驱动的注意机制典型模型是1998年由Itti和C.Koch等提出的Itti模型[1],该模型主要基于Treisman的特征整合理论,对图像的纹理、颜色、朝向等多方面特征进行提取,并形成各特征显著图,然后将这些特征显著图进行分析融合得到总的显著图,对总显著图中的目标进行检测。
桑农、李正龙等[2]将这一模型应用到可见光图像的RGB颜色空间的目标检测中;叶聪颖,李翠华[3]将这一模型应用到HIS颜色空间的海上目标船只检测中;Sun-Gu Sun,Dong-Min Kwak等[4]将这一模型进行修正并应用于红外目标检测。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第47卷第2期2017年2月激光与红外L A S E R&I N F R A R E DVol.47,No.2February ,2017文章编号:l〇〇l-5078(2017)02-0252-05 •图像与信号处理•基于视觉对比度机制的红外小目标检测陈玉文\李玲2,辛云宏1(1.陕西师范大学物理学与信息技术学院,陕西西安710119;2.西安航空学院机械工程学院,陕西西安710077)摘要:复杂背景条件下的红外小目标检测是红外预警、红外搜索与跟踪等系统的关键技术和 研究热点之一。
针对红外序列图像中弱小目标检测问题,提出了 一种基于视觉对比度机制的 红外小目标检测方法。
该方法首先运用加权高斯差分方法计算出目标显著性图,接着采用模 糊控制方式优化参数获取显著性区域,最后通过显著区域与周围区域对比度分析获取真实目 标。
从实验结果以及和其他方法对比可以看出,所提出方法具有较高的检测率和较低的虚警 率,是一种有效的小目标检测方法。
关键词:红外小目标;人类视觉;对比度机制;显著性;检测中图分类号:TP391. 4 文献标识码:A DOI:10.3969/j. issn. 1001-5078.2017.02.024 Infrared small target detection based on visual contrast mechanismCHEN Yu-wen1,L I Ling2,XIN Yun-hong1(1. School of Physics and Information Technology,Shaanxi Normal University,Xi,an 710119,China;2. Xi^n Aeronautical University,School of Mechanical Engineering,Xi?an 710077,China)Abstract :Infrared small target detection under complicated backgrounds i s a key technology and a hot research in the infrared early warning system,infrared search and tracking system,e t c.For dim target detection in infrared images,an infrared small target detection method was proposed based on visual contrast mechanism. Firstly,the saliency maps of the targets were calculated by the weighted Gaussian difference method. Then regions of interest were obtained by adjust parameters of fuzzy control. Finally,the contrast between regions of interest and surrounding regions was analyzed t o obtain the true t a r gets. The experimental results show that the method has the higher detection rate and lower false alarm rate,and i t i s an efficient infrared small target detection method.Key words:infrared small target; human vision; contrast mechanism; saliency; detectioni引言红外图像处理技术广泛应用于军事与民用领 域。
其中红外小目标检测,在遥感领域、军事监督、航天航空等领域发挥着重要作用。
在红外搜索与跟 踪系统中,由于成像距离远,背景以及噪声干扰等因素使系统获取图像信杂比低,弱小目标很容易淹没 在背景噪声中,这使得红外弱小目标很难被有效地 检测出来。
所以复杂背景下的红外小目标检测一直 受到研究学者的广泛关注[1<。
常见的红外小目标检测算法有均值滤波[4]、数基金项目:中国自然科学基础研究项目(No. 11574192);陕西省自然科学基础研究项目(No. 2016GY - 110);陕西省教育厅项目(N a l2J K0995)资助。
作者简介:陈玉文(1992 -),硕士研究生,主要研究方向为红外小目标检测与跟踪。
E-mail:yuwench@ snnu. edu. cn通讯作者:辛云宏(1967 -),男,教授,博士,主要研究方向为微弱光电信号检测与处理,被动目标定位跟踪,多传感器信息融合〇E-mail :xinyh@ snnu. edu. cn收稿日期=2016-05-17;修订日期:2016-06-02激光与红外No.2 2017陈玉文等基于视觉对比度机制的红外小目标检测253学形态学[5]、匹配滤波[6]等。
近些年,研究学者发 现将人类视觉机制运用到目标检测中可以得到良好 的效果。
因为在人类视觉机制中,复杂背景中的显 著性区域可以快速被发现并不受到干扰[74]。
基于 以上研究,本文提出了一种基于人类视觉对比度机 制的红外小目标检测方法。
其中,运用加权高斯差 分的方法计算显著性图,并采用模糊控制方式优化 参数获取显著性区域,通过显著区域与周围区域对 比度分析获取真实目标。
仿真实验证明该方法是高 效可行的。
2小目标检测算法2.1计算显著性图在红外小目标图像中,小目标通常比周围背景明 亮,并且与周围区域不连续,形成显著性区域。
因此,红外小目标检测可以转换为红外图像中显著性区域 的检测。
首先计算显著性图,提取出感兴趣的显著性 区域,再在提取出来的显著性区域进一步优化确定目 标区域,这样将明显提高小目标检测效率。
目标的显著性可以通过在频域内增强目标信号 同时抑制背景噪声的方式得到提高,而高斯差分滤 波[7]是常用的带通的滤波方式,多用于图像分割,边缘检测等领域。
一维高斯函数为:G(r,cr) =i—e~^2(1)二维高斯函数为:高斯差分函数定义为:D〇G(,〇-2)=G(i,j,cr^-G(i,j,cr2'>(3)其中,和心分别是高斯函数的标准差,且>。
/为D〇G滤波的带通宽度。
我们需要通过 〇"2滤除掉低频和高频的背景噪声来突出显著性区域,因此,^和心分别选取为无限大和1。
根据对小目 标在红外图像中的灰度特性分析,小目标可以看作 是背景中的一个明亮的斑点。
在这里采用一种加权 模板滤波的方式来进一步凸出目标的显著性。
通常 情况下,模板大小与目标大小越接近,目标显著效果越好。
一般来说红外图像中小目标的大小不超过 11 x11个像素,模板r的定义如下:(nxr^)⑷根据实验序列图像数据统计,选取r5x5模板来 进行加权显著性计算。
采用5 x5二项核分别近似 =00和C T2=1的离散高斯函数。
P(i,P=l^2(i j)-G C T i(i j)(5)G cti和GC T2分别是标准差为和。
高斯核与原 图像卷积的结果。
权值计算定义如下:w(i,j)= T* I(i,j)(6)W(i,p(7)l〇其中,*为卷积计算。
如果像素点在均匀背景区域 中,那么它的权值趋向于0。
如果像素点在目标区 域中,由于目标点像素值比周围区域像素值大,那么 大的权值将大于0。
中心像素点与周围像素点对比 度差异越大,将获得更大的权值。
加权显著性图定义如下:=w(i,j)•P(i,j)(8) 2.2获取显著性区域计算出加权显著性图后,我们需要获取感兴趣 的显著性区域。
以t f x t f大小的窗口在显著性图中 从左到右,从上到下滑动,窗口移动间隔约为tf/2,实验中我们设置为5,移动间隔为2。
每个窗口区 域R的显著性程度计算如下:S R=X S“,乃(9)设定可i整阈值选取感兴趣区域,阈值Th 定义为:Th= a •max(S R)(10)254激光与红外第47卷I 选取为大于T h 的\区域。
a 的参数选择,设置为模糊控制的可调参数,假设^个数为/V ,参 数调整更新方式如下:ra + a ,5 < A^^IO• (j ,10<A ^15(11)ia +4 • a ,N >15a初始值为〇. 6,<7为0. 05。
通过迭代计算,调整cr 值,抑制更多的背景区域从而提高检测目标区域的效率。
2.3自标识别对于挑选出来的感兴趣区域,如果区域个数只 为1,那么就认定该区域为目标区域,如果区域个数 大于1,那么我们进一步进行自标识别。
以感兴趣 区域为中心与中心区域等大小建立如图1所示 的分割区域。
Ri及2及3R a 丑5R e«7图1域Fig. 1 Segmented region感兴趣区域与周围背景区域局部对比度计算 如下:I m a x =max (/( J J>) ,(f j) G R 0(12)m 0 :=1 y i n w x r (,么 1,P(13)m =Y i h Eny X F (Ii,j)eR n(14)Cs d•饥0.m(15)'怍为权值与.輝鹰小K 域和中心K 域的相似度有关,也,为区域足和区域的相似度度鹫,定 义如下;也=扣,(16)则&定义如下:与中心K 域越相似的周围小区域,分配较太的 权值,局部对比度值c sd 较小,由于目标区域与周围区域差异较大,说明该中心区域是g 标区域的可能性较小6对于I 计算出来的局部对比度值^,目I 标像素点的局部对比度植将得到增强,而非目标像 素点的局部对比度值将受到抑制。
为了进一步抑制 非目标像素点,设蠱e 个简单的阈值:T = 0. 7 • max ( C s e l ^ (18)G 大于r 的区域则被着作目标区域,其他区域则是非目标区域。
算法流程框图如图2所示。
廣__2淹程框商_.Fig. 2 Block diagram of the proposed target detection method3实验结果分析为验雜文中的算法,在3. 3〇G Hz Intel Corei 3 PC上的M atlab (R 2010a )仿真中,选取三组序列图像做 仿真结果分析,分别.是320帧,240帧和180帧,图 像大小为384 x 288像素。