MoviDrive61B 端子控制
2MOVIDRIVE 61B变频器参数设置

12_ 模拟量输入AI2
参数号
120
参数名称
模拟量输入 2
选
项
含
DIO11A扩展板
义
备
注
NO-FUNCTION 0---10 V+SETPT1 0---10 I-LIIMIT AI2+AI1 电流限幅值 0---10V对应 0----100% 的 P303 内部电流限幅 值
差分输入连接:
以AGND为参考点输入连接:
参数概览
------基本显示
2
------显示值
------设定值和斜率发生器
------转速调节器和位置调节器
------电机参数 ------参考信号 ------监控功能 ------二进制端子定义
------控制功能
------系统功能 ------IPOS参数定义
TASC / Malijun / May 8, 2003 Driving the world
TASC / Malijun / May 8, 2003
094---096 PO1---PO3 设定值 过程输出值 ( PLC→控制器) 097---099 PI1---PI3 状态值
过程输入值 (控制器→ PLC)
TASC / Malijun / May 8, 2003
Driving the world
Training \ TASC \ Driving Control Products 10
MOTOR POTENTION二进制输入( MOTOR.POT. UP和 MOTOR.POT. DOWN)用于定
义转速设定值; 二进制输入正转 /停和反转 /停决定转动方向;
SBUS
TASC / Malijun / May 8, 2003
MDX61B应用介绍

设备类型应选择 为Movidrive B
软件启动画面
Guangzhou / liushaoyuan / Feb 21, 2010
Driving the world
Training \ Guangzhou \ Driving Control Products
16
二、MDX61B参数设置
1、MOVITOOLS软件的使用
电机的Load inertia可以通过三种 方法获得。
Driving the world
Training \ Guangzhou \ Driving Control Products
23
二、MDX61B参数设置
2、电机初始化 (1)、通过点击“determine automatically”按钮,在弹出对话框中点“确定” 按钮,然后让系统高速运转一个行程,此时Load inertia显示框的数据会发 生变化,记录下显示的最大值,然后将该值输入。(主要用于客户自己不能 精确地计算出系统的惯量)
软件界面 MOVITOOLS
示波器软件 SCOPE 达高EMC标准:内置式输入滤波器达BG II级
对电网干扰低,输入电流低
达到标准和认证:
Guangzhou / liushaoyuan / Feb 21, 2010
Driving the world
Training \ Guangzhou \ Driving Control Products
Driving the world
Training \ Guangzhou \ Driving Control Products
22
二、MDX61B参数设置
2、电机初始化
电机控制模式选择画面 变频器中有应用IPOS程序就要选 择Positioning with IPOS.
SEW MOVIDRIVE MDX61B调试步骤同步伺服(binary setpoint)

9、选择“Execute complete start-up(执行完整的初始化)”;
10、选择“Stand-alone motor > Vector-controlled/Servo(独立电机 > 矢量 控制/伺服电机)”;
11、参照电机铭牌,检查电机及编码器信息是否准确;
12、检查电机类型信息;
47、可选择“project > save(as)”,保存项目;
48、可选择“project > export”,导出项目到压缩文件;
49、若后期设备应用有更改,需初始化控制器,可在“parameter tree”P802中选择“delivery state”,将控制器还原为出厂状态。
4、定义硬件名称,点击“finish”开始硬件配置;
5、硬件配置中;
6、硬件配置完成后,去除控制器X13/DIΦΦ“控制器禁止”端子的二进 制输入,然后点击“startup”;
7、点击“perform startup”,开始初始化;
8、点击“startup set-1”,进行parameter set-1设置( 如果需要两套参数 运行,parameter set-2设置采取同样步骤);
SEW MOVIDRIVE MDX61B调试步骤
(binary setpoint)
WEISS-CHINA
2014/05
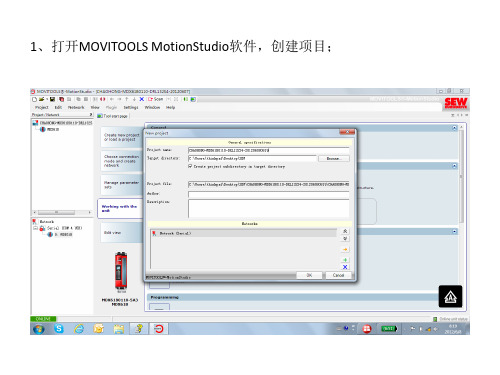
1、打开MOVITOOLS MotionStudio软件,创建项目;
2、用USB11A连接电脑和MDX61B控制器的XT插槽,扫描网络上的设备;
3、选择“configure device”,对连接到的设备进行硬件配置;
21、点击“完成”,将初始化信息下载至控制器。如需配置parameter set-2,点击“download”,再进行参数包示框,点击“确定”;
SEW MDX61B_变频器说明书(1)

选择所需语言下图显示选取所需语言时必要的按键。
1.语言选择2.向上箭头,选择上一个菜单项3.OK ,输入确认4.向下箭头,选择下一个菜单项在启动或激活 DBG60B 操作面板的数据传送状态时显示屏上会显示下列内容几秒钟:之后显示屏上会显示语言选择标识。
请按以下步骤选择所需要的语言:•按下按键“Language selection ”。
在显示屏上会出现可供选择的语言列表。
•通过按“向上箭头 / 向下箭头”键选择所需要的语言。
•按“OK ”键确认所选择的语言。
在显示屏上会出现所选语言的基本显示。
06534AXX图53:语言选择按键SEW EURODRIVE54533AXX调试下图显示进行调试所必须的按键。
1.放弃调试或中止2.菜单切换,显示模式 È 编辑模式3.向上箭头,选择上一个菜单项4.OK ,输入确认5.激活上下文菜单6.向下箭头,选择下一个菜单项调试步骤图54:调试按键1.在端子 X13:1(DIØØ“/Controller inhibit ”)处输入“0”信号,例如通过断开电子接线板 X13。
0.00rpm 0.000AmpCONTR. INHIBIT 2.PARAMETER MODE VARIABLE MODE BASIC VIEW3.“STARTUP PARAMET ”菜MANUAL MODESTARTUP PARAMET.COPY TO DBG COPY TO MDX4.••以选择“PARAMETER SET 1” 或“”。
•••STARTUP PARAMET.PREPARE FOR STARTUPC00*STARTUP PARAMETER SET 1PARAMETER SET 25.C01*OPER. MODE 16.选择电机型号。
已连接2极或4极 SEW 电机时,要从选择列表中选择正确的电机。
如要连接其它厂商的电机或者极数多于 4极的 SEW 电机,需要从选择列表“NON-SEW MOTOR ”中C02*MOTOR TYPE 1DT71D2DT71D4DT80K2C02*MOTOR TYPE 1NON-SEW MOT.DT63K4/DR63S47.根据电机的铭牌为所选连接类型输入电机额定电压。
SEW MDX61B初始设置

SEW MOVIDRIVE MDX61B 初始设置1、启动MOVITOOLS;2、在“language”选择区端,选择“ENGLISH”;3、在“PC-COM”选择区端,选择变频器所连接的PC断口号;4、在“Device type”区端,选择“MOVEDRIVE B”;5、在“Baud rate”区端,选择波特率;6、按<Update>钮,显示所连接的变频器;7、在“Execute program”选择区端,按“Parameter/Diagnosis”下的<shell>钮,启动shell程序;8、在shell程序中,选择[Startup/Startup…]菜单命令;9、在“Start-up”窗口中,确定变频器和电机的型号,点下一步;10、在“Start-up type”窗口中,选择“Execute complete start-up”,点下一步;11、在“Moter-inverter configuration”窗口中,选择“Stand-alone motor /Vector-controlled/Server”,点下一步;12、在“Select Motor Type”窗口中,选择电机类型;13、在“SEW-motor type 1 CT/CV”中,选上电机的一些设置;14、在“USE Encoder”中,选择“YES”;15、在“Possilbe applications”中,选择“Positoning with IPOS”;16、在“Operating Modes”中,选择“VFC”;17、在“Speed Controller VFC”中,“Load inertia”里的数据设为“JO Motor”里数据的5倍,其它按要求设定;18、在接下的窗口中,除了变更一下通讯方式外,其余都选默认值;19、在“DOWNLOAD”时,要注意将端子X13:1(DIOO“/控制器禁止”)必须为“0”信号(将该继电器的线圈拔出);20、选择“Startup/Extended positioning via bus”点中“commissioning”在下面的窗口中设定一些必要的参数;21、在“DOWNLOAD”时,也要将端子X13:1(DIOO“/控制器禁止”)必须为“0”信号(将该继电器的线圈拔出);22、下载完成后,将继电器线圈插回;23、在“SHELL MOVITOOLS”中,选择“Manual Operation”(一个手掌标志),进行手动操作;24、手动操作中,在点正转的时候,其“Actual Position”数据应该是增加的,如果变频器动作,电机不转,可能是电机的相序有误,调整电机的相序。
MDX61B驱动同步伺服电机初始化介绍

TASC Training tianjin 2008Driving the worldTASC _ 2008_12MDX61/60B —DS/CM/CMP 同步伺服电机初始化---MOVITOOLS4.6版本TASC Training tianjin 2008Driving the worldTASC _ 2008_121MDX61/60B —DS/CM/CMP 同步伺服电机初始化MOVIDRIVE B 型由S13开关决定选择PC 连接接口注意:选择带有(USB)标志SBUS 、RS485地址点击[Update]按钮显示所有连接的变频器连接的设备类型项目路径关闭所有的工具点对点连接按RS485地址连接TASC Training tianjin 2008Driving the worldTASC _ 2008_122MDX61/60B —DS/CM/CMP 同步伺服电机初始化设定和显示参数和系统状态信息记录系统数据的应用程序IPOS 应用程序应用编辑器:设定CAM 、ISYNC 参数ApplicationBuilding :创建用户的应用界面Data backup :保存和装载设定参数监控总线通讯TASC Training tianjin 2008Driving the worldTASC _ 2008_123MDX61/60B —DS/CM/CMP 同步伺服电机初始化点击[Startup]按钮或选择[Startup]菜单选择初始化开始MOVITOOL Shell 菜单,有两种方式进入初始化向导:1. 点击电机按钮;2. 或选择[File]菜单下的[Startup]选项;3. 点击初始化向导后,首先读取变频器的参数TASC Training tianjin 2008Driving the worldTASC _ 2008_124MDX61/60B —DS/CM/CMP 同步伺服电机初始化同步伺服电机(DS/CM/CMP )初始化过程: 变频器内可存储2套电机的参数,2台电机可通过接触器选择,参数组通过开关量输入设定; 第一个窗口是不可以修改的,其显示的存储在变频器内基本参数(包括选件和电机参数)DS/CM/CMP 同步伺服电机只能通过软件方式完成电机初始化第一个窗口,选择电机参数组TASC Training tianjin 2008Driving the worldTASC _ 2008_125MDX61/60B —DS/CM/CMP 同步伺服电机初始化选择完整的初始化过程选择部分初始化过程第二个窗口,选择全部或部分初始化TASC Training tianjin 2008Driving the worldTASC _ 2008_126MDX61/60B —DS/CM/CMP 同步伺服电机初始化简单的速度控制选择标准模式(V / F )选择矢量控制模式 VFCVFC n-control CFC同步伺服电机SERVO第三个窗口,选择变频器连接的电机TASC Training tianjin 2008Driving the worldTASC _ 2008_127MDX61/60B —DS/CM/CMP 同步伺服电机初始化因为电机编码器不带有电子名牌,无显示信息第四个窗口,显示编码器的信息TASC Training tianjin 2008Driving the worldTASC _ 2008_128MDX61/60B —DS/CM/CMP 同步伺服电机初始化SEW 同步伺服电机第五个窗口,选择电机的类型TASC Training tianjin 2008Driving the worldTASC _ 2008_129MDX61/60B —DS/CM/CMP 同步伺服电机初始化注:由于同步伺服电机标配有旋转变压器RH1M/RH1L ,故控制器默认此编码器型号。
SEW MOVIDRIVE MDX61B调试步骤
25、例如,P933突变时间;
26、参数配置为在线实时进行,完成后,点击“manual mode”手动模式;
20、点击“Activate manual mode”,激活手动模式;
28、连接控制器X13/DIΦΦ“控制器禁止”端子的二进制输入;
29、选择控制速度,旋转方向,点击“start”或“stop”进行启停控制;
10、选择“Stand-alone motor > Vector-controlled/Servo(独立电机 > 矢量 控制/伺服电机)”;
11、参照电机铭牌,检查电机及编码器信息是否准确;
12、检查电机类型信息;
13、输入电源电压,定义参数P835“电机温度传感器的响应”,定义参 数P530“电机温度传感器类型”(例如TF/TH);
30、手动模式下,转台运行正常后,点击“Deactivate manual mode”;
31、选择“是”,退出手动模式;
32、创建AMA0801模块;
33、去除控制器X13/DIΦΦ“控制器禁止”端子的二进制输入,点击 “next”,开始初始化AMA0801模块;
34、总线参数和控制器配置页面,建议使用其默认参数;
35、刻度计算页面,“Diameter/spindle pitch”的单位选择“inc”;
36、参数和极限页面,若使用硬件限位开关,需将CW和CCW限位开关分别接到 控制器X13/DI Φ 4和X13/DI Φ 5端子,同时在软件上选择“YES”,“parameter tree”中将P603和P604端子功能设置为相应的限位功能;如果没有原点传感器, 寻找参考点模式选择5,即将当前点作为原点;
21、点击“完成”,将初始化信息下载至控制器。如需配置parameter set-2,点击“download”,再进行参数包2的配置;
MDX61B变频器说明_参数_useful

标准:
Workshop Movidrive B / 2006.12
EN
德国 欧洲 美国 加拿大 澳大利亚
Driving the world
Gearmotors \ Industrial Gear Units \ Drive Electronics \ Drive Automation \ Services 6
菜单结构
1 参数模式
2 变量模式
3 基本显示 4 Wake-up 参数 5 手动操作 6 初始化操作 7 拷贝到 DBG 8 拷贝到 MDX
9 用户菜单 10 P0000 增加 11 P0000 消除 12 可设定 wake-up 参数 13 供货状态 14 系统设定 15 退出
Workshop Movidrive B / 2006.12
MOVIDRIVE® B 从基础到灵活的应用:
功能
VFC 不带编码器 常规驱动控制
应用
速度控制 链式输送, 泵, 排气, 推进驱动, 输送 驱动
VFC 带编码器 高要求应用,位置控制能力
CFC 带异步伺服电机 高控制精度和动态特性,位置控制能力 SERVO 带同步伺服电机 高控制精度和动态特性,位置控制能力
Safety Stop 如果频率编码器处于 “Safety Stop“模式, 显示“U“. IPOS Task IPOS 程序运行时,显示一个点在闪烁.
通过键盘STOP
通过 键盘上的停止按钮停车时, 一个闪烁的操作码 会显示出来.
Workshop Movidrive B / 2006.12
Driving the world
Gearmotors \ Industrial Gear Units \ Drive Electronics \ Drive Automation \ Services 17
SEW MDX61B_变频器说明书(1)
选择所需语言下图显示选取所需语言时必要的按键。
1.语言选择2.向上箭头,选择上一个菜单项3.OK ,输入确认4.向下箭头,选择下一个菜单项在启动或激活 DBG60B 操作面板的数据传送状态时显示屏上会显示下列内容几秒钟:之后显示屏上会显示语言选择标识。
请按以下步骤选择所需要的语言:•按下按键“Language selection ”。
在显示屏上会出现可供选择的语言列表。
•通过按“向上箭头 / 向下箭头”键选择所需要的语言。
•按“OK ”键确认所选择的语言。
在显示屏上会出现所选语言的基本显示。
06534AXX图53:语言选择按键SEW EURODRIVE54533AXX调试下图显示进行调试所必须的按键。
1.放弃调试或中止2.菜单切换,显示模式 È 编辑模式3.向上箭头,选择上一个菜单项4.OK ,输入确认5.激活上下文菜单6.向下箭头,选择下一个菜单项调试步骤图54:调试按键1.在端子 X13:1(DIØØ“/Controller inhibit ”)处输入“0”信号,例如通过断开电子接线板 X13。
0.00rpm 0.000AmpCONTR. INHIBIT 2.PARAMETER MODE VARIABLE MODE BASIC VIEW3.“STARTUP PARAMET ”菜MANUAL MODESTARTUP PARAMET.COPY TO DBG COPY TO MDX4.••以选择“PARAMETER SET 1” 或“”。
•••STARTUP PARAMET.PREPARE FOR STARTUPC00*STARTUP PARAMETER SET 1PARAMETER SET 25.C01*OPER. MODE 16.选择电机型号。
已连接2极或4极 SEW 电机时,要从选择列表中选择正确的电机。
如要连接其它厂商的电机或者极数多于 4极的 SEW 电机,需要从选择列表“NON-SEW MOTOR ”中C02*MOTOR TYPE 1DT71D2DT71D4DT80K2C02*MOTOR TYPE 1NON-SEW MOT.DT63K4/DR63S47.根据电机的铭牌为所选连接类型输入电机额定电压。
SEW FURODRIVE MOVIDRIVE MDX60B 61B 说明书

操作手册 – MOVIDRIVE ® MDX60B/61B 32.2运行和维护 (7)3系统描述 (8)3.1控制器型号、铭牌和供货范围 (8)3.2控制器结构规格0 (15)3.3控制器结构规格1 (16)3.4控制器结构规格2S (17)3.5控制器结构规格2 (18)3.6控制器结构规格3 (19)3.7控制器结构规格4 (20)3.8控制器结构规格5 (21)3.9控制器结构规格6 (22)4安装 (23)4.1基本单元安装说明 (23)4.2操作面板的拆装 (28)4.3前盖板的拆装 (29)4.4符合UL 规定的安装 (31)4.5屏蔽夹 (32)4.6保护罩 (35)4.7基本单元接线图 (37)4.8制动电阻、扼流圈和滤波器的配置 (41)4.9系统总线 (SBus 1)连接 (46)4.10RS485连接 (47)4.11转换接口选件 UWS21A (RS232) (48)4.12转换接口选件 USB11A (49)4.13选件 MDX61B (50)4.14扩展卡的安装及拆卸 (51)4.15编码器及旋转变压器的连接 (53)4.16选件DEH11B (HIPERFACE ®)的连接 (55)4.17选件 DER11B (旋转变压器)的连接 (59)4.18外部编码器的连接 (61)4.19增量式编码器模拟输出的连接 (64)4.20主从连接 (65)4.21选件DIO11B 的连接和端子说明 (66)4.22选件DFC11B 的连接 (69)5调试 (70)5.1调试的一般说明 (70)5.2准备工作和辅助工具 (72)5.3使用DBG60B 操作面板进行调试 (73)5.4使用计算机和 MOVITOOLS ® 程序进行调试 (81)5.5电机的启动 (82)5.6全部参数表 (85)6.3DBG60B操作面板功能 (98)6.4记忆卡 (101)6.5故障信息 (102)6.6故障显示和故障表 (103)6.7SEW 电子服务部 (106)7技术数据和尺寸图 (107)7.1CE 标志、UL 认证和 C-Tick (107)7.2技术数据概览 (108)7.3MOVIDRIVE® MDX60/61B...-5_3 (400/500 V单元) (110)7.4MOVIDRIVE® MDX61B...-2_3 (230 V单元) (117)7.5MOVIDRIVE® MDX60/61B 电子数据 (121)7.6MOVIDRIVE® MDX60B尺寸图 (123)7.7MOVIDRIVE® MDX61B尺寸图 (125)7.8选件 DEH11B、选件 DER11B 及选件 BW...-T 的技术数据 (134)7.9选件 DIO11B 及选件 DFC11B 的技术数据 (135)8变更索引 (136)8.1对旧版本所作改动 (136)9关键词目录 (138)4操作手册 – MOVIDRIVE® MDX60B/61B操作手册 – MOVIDRIVE ® MDX60B/61B 51重要提示安全提示和警告提示请务必严格遵守使用本手册中的安全和警告提示!用途规定MOVIDRIVE ® MDX60/61B 变频器固定安装在开关柜内。
SEW-MDX61B驱动器-MOTION STUDIO软件调试步骤和方法-同步伺服电机

然后点击
移动类型负载折算到电机轴处的转动惯量
运行物体质量M:[kg] 运行速度v:[m/s] 达到运行速度v时电机的运行转速nm:[rpm] 负载折算到电机轴处的转动惯量 Jext:[kgm2 ]
Jext = 91.2 * M * (v/nm)2
转动方向
垂直于圆环平面
实心圆柱体 沿纵轴方向
空心厚壁圆柱体 沿纵轴方向
圆盘
垂直于圆盘平面
圆盘
沿对称轴方向
球体
沿球心轴线方向
空心薄壁球体 沿球心轴线方向
长度l的棍体 垂直于棍体中心
图识 转动惯量
J = m * r2
J=
1 2
*m *
r2
J=
1 2
* m * ( r12 +
r22
)
J=
1 2
*m *
r2
SEW – MDX61B系列调试
总线控制 - 系统架构
端子;模拟量控制 - 系统架构
软件调试工具
➢ 1.电脑通讯盒USB11A ➢ 2. SEW - MOVITOOLS® MOTION STUDIO
软件
USB11A
MOVITOOLS® MOTION STUDIO 软件
➢ 1.电脑通讯盒USB11A 随机附带光盘 ➢ 2. SEW – 网站下载2.2G版本 https://www.seweurodrive.de/os/dud/?tab=software&country=DE &language=de_DE&search=movitools
选择速度操作模式
然后点击
刚性(范围0.5-2),数值越大,刚性 越强,但电机易不稳定,通常先输 入1,在根据实际情况调整
SEW-MDX61B-同步伺服系统调试方法和步骤-正反转-模拟量控制-端子模式-带增量型编码器R..M(L)

1配置:①驱动器MDX61B… ②编码器板DER11B③同步伺服电机-带增量型编码器…CM…RH1M(L)2系统架构:L1L2L3PECM / CMP(Z)同步伺服电机1. 水平驱动2. 升降驱动硬件接线:水平驱动(对于CM..71-112机座号同步伺服电机,通常制动器为380V AC带BME制动整流块!)3PLC驱动器输出U,V,W驱动器处编码器连接为D型插头需配9芯针型插头RefRef-CosCos-Sin+Sin-TF/TH/KTYTF/TH/KTY-编码器电缆请用专用的10芯屏蔽信号线缆,每两芯为一双绞SEW-编码器电缆型号拖缆用:1995901非拖缆用:1995898增量型编码器:Resolver信号硬件接线:水平驱动(对于CM..56-63机座号同步伺服电机,通常制动器为24VDC!)4PLC型插头驱动器输出U,V,W硬件接线:升降驱动!! (对于SEW-71机座号以上同步伺服电机,通常制动器为380V AC带BME制动整流块!)(建议:制动器采用快速制动;PLC保护制动)(防止溜车,及意外坠落)5PLC驱动器输出U,V,WD型插头需配9芯针型插头RefRef-CosCos-Sin+Sin-TF/TH/KTYTF/TH/KTY-编码器电缆请用专用的10芯屏蔽信号线缆,每两芯为一双绞SEW-编码器电缆型号拖缆用:1995901非拖缆用:1995898增量型编码器:Resolver信号6/CONTROL.INHIBIT端子功能:在对伺服系统作初始化配置,以及对一些重要的结构功能性参数进行设置时,必须将/CONTROL.INHIBIT端子置为0,而系统运行前,需将/CONTROL.INHIBIT端子置为1,在此端子由1变为0时,伺服控制器将立即停止所有输出,电机马上处于无控制状态,系统按其惯性自由停车,因此不能用此端子进行正常的快速停止功能:使用MOTION STUDIO软件配置电机详见PPT:使用MOTION STUDIOS软件-手动操作模拟器直接驱动电机运行,以检测电机接线,编码器接线,电机特性配置是否良好详见PPT:使用MOTION STUDIO软件设定参数100→设为Unipolar/fixed setpoint;(单极性模拟量/固定点设定)101→设为Terminals;(端子控制)112→设为10 V, reference maximum speed;(0-10V模拟量控制)或4-20 mA, reference maximum speed;(4-20 mA模拟量控制)与S11开关的拨码位置必须对应,否则驱动器将会按最大速度输出130→设为所需值;(速度控制时CW顺时针运行加速斜坡时间);131 →设为所需值;(速度控制时CW顺时针运行减速斜坡时间)132 →设为所需值;(速度控制时CCW逆时针运行加速斜坡时间)133 →设为所需值;(速度控制时CCW逆时针运行减速斜坡时间)136→设为所需值;(当ENABLE/RAP.STOP端子由1变为0时,电机的停转时间)160 →设为所需值;(接通n11/n21固定速度端子时,电机运行速度)161 →设为所需值;(接通n12/n22固定速度端子时,电机运行速度)162 →设为所需值;(接通n13/n23固定速度端子时,电机运行速度)200 →设为所需值;(电机的速度环增益,系统会按电机配置时,输入的负载情况,设定建议值)201 →设为所需值;(电机的速度环时间常数,建议值40-80)301 →设为0;(输出最小转速);302 →设为所需值;(输出最大转速);303 →设为所需值;(输出最大电流限幅);500 →设为MOT. & REGEN.MODE;(电机过载保护功能打开);501 →设为所需值;(电机过载,达到参数303设定值后,多长时间才停机报警);600 →设为CW/stop;(正转)601 →设为CCW/stop;(反转)602 →设为Enable/stop;(输出使能)603 →设为n11/n21;(固定速度1)604 →设为n12/n22;(固定速度2)7620 →设为/Fault;(故障报警)621 →设为Rotating field ON;(电机是否运行)700 →设为Servo;(伺服速度闭环控制模式)731 →制动器释放时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,起动时防溜车时间)732 →制动器应用时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,停止时防溜车时间)模拟量控制电压或电流信号选择电磁干扰屏蔽安装要求伺服控制器至伺服电机的动力电缆需采用带屏蔽层,屏蔽层从头至尾不应有断层,并用金属8夹可靠紧固,大面积接地编码器线需采用专用带屏蔽层双绞线,并用金属夹将屏蔽层可靠紧固接地,屏蔽层从头至尾不应有断层。
SEW变频器MOVIDRIVE培训教程

MDX60/61B变频器培训教程技术部:陈刚2012-8-27第一部分:变频器的结构、原理与应用目前轿车公司变频器使用类型比较多,常用的有SEW、AB、三菱、伦茨等品牌。
一、变频器的作用与基本原理能实现对交流异步电机的软起动、无级调速、提高运转精度、改变功率因数、节能、过流/过压/过载保护等功能。
变频调速技术的理论基础是三相交流异步电动机的转速与频率成正比,与极对数成反比——n=(1-s)60f/p其基本原理框图(应用最多的类型)是:`即三相(单相)交流电经过整流电路转换为直流电源,然后再逆变成三相交流电动机使用的经过调制的等幅脉动直流,脉动直流密度与对应交流应获得幅值成正比。
输出驱动电流使用了脉冲宽度调制技术(PWM)。
由于输出的波形是脉动直流,所以变频器对电网的谐波干扰非常大。
二、变频器速度控制方式变频器常见的频率给定方式主要有:操作器键盘给定、接点信号给定、模拟信号给定、通讯方式给定等。
1、操作键盘给定通过操作键盘给定速度,手工或自动操作启动、停止变频器。
2、接点信号给定通过外部开关接点组合代码来选择速度,而速度要在参数表设置。
3、模拟信号给定包括0-5VDC、(0)1-10VDC、20mA电流、电位器给定等。
4、通讯方式给定通过总线或其它接口,由另一个控制器把速度写入变频器特定的缓冲字中。
三、外部接线下图是一个三菱变频器接线的例子,这是变频器使用极其典型的电路。
图中,使用了接点信号给定的速度输入方式。
三级速度、停止、复位、正转、反转等都由PLC输出控制,运行、异常报警信号接入PLC输入端。
四、工作方式与运行特性变频器由于其控制上的柔性,可以获得多种改良特性。
1、工作方式:基本工作方式有恒转矩、恒功率两种。
(1)恒转矩控制根据转矩与“电压/频率”比值的平方成正比的数学关系,我们知道,要实现恒转矩方式,必须保持U/f为常数。
这就是为什么恒转矩控制方式下,频率下降,输出电压也要跟着同比降低的原因。
sew变频器MOVIDRIVE说明----3
MOVIDRIVE
新的外形尺寸
TASC / Malijun / May 8, 2003
Driving the world
Training \ TASC \ Driving Control Products 4
变频技术的新概念
适用于各种复杂应用 场合的变频技术
闭环矢量控制,带或不 带编码器,在低速时输 出最大的转矩来控制同 步或异步电机。
TASC / Malijun / May 8, 2003
Driving the world
Training \ TASC \ Driving Control Products 5
系 列
MOVIDRIVE包括功能相同的三 个变频器系列,功率范围从 1.5KW到132KW。
• MDF系列对交流电机进行电压矢量控
TASC / Malijun / May 8, 2003 Driving the world
Training \ TASC \ Driving Control Products 19
变频器参数的设定方法
操作面板
DBG11B操作面板具备存储器功能
(EEPROM)。支持将变频器参数存
到操作面板中作为备份和将操作面 板中的参数拷贝到变频器中。当对 多台相同控制应用及功率的变频器 进行调试时。可以通过拷贝参数实 现对多台变频器的快速调试。 操作面板作为调试和显示单元 如果有一台变频器需要有一个,即
MDF、MDV
MDV
TASC / Malijun / May 8, 2003
Driving the world
Training \ TASC \ Driving Control Products 14
精度说明:
SEW-MDX61B驱动器-MOTION STUDIO软件调试方法和步骤-异步伺服电机

设定相关参数
监控电机运行状态
监控模拟量输入数据
监控PLC输入点状态
监控变频器输出点状态
08参数组可记录最 近的5组故障情况
2. 总线网络控制
设定相关参数
监控电机运行状态 监控PLC输入点状态
监控总线数据
监控变频器输出点状态
驱动器内部程序输入
IPOS plus
内部位置控制和逻辑控制系统
• 支持宏指令,最多包含1000个指令行和注释行 • 支持增量型编码器和绝对值编码器 • 近似于PLC功能
软件调试工具
➢ 1.电脑通讯盒USB11A ➢ 2. SEW - MOVITOOLS® MOTION STUDIO
软件
USB11A
MOVITOOLS® MOTION STUDIO 软件
➢ 1.电脑通讯盒USB11A 随机附带光盘 ➢ 2. SEW – 网站下载2.2G版本 https://www.seweurodrive.de/os/dud/?tab=software&country=DE &language=de_DE&search=movitools
SEW – MDX61B系列调试
总线控制 - 系统架构
L1 L2 L3 PE
MDX61B... DBG60B 编码器卡
USB11A
总线网卡 制动电阻
电机编码器 DRL...异步伺服电机
端子;模拟量控制 - 系统架构
L1 L2 L3 PE
MDX61B... DBG60B
编码器卡
USB11A
制动电阻 电机编码器 DRL...异步伺服电机
转动类型负载折算到电机轴处的转动惯量
转动物体质量M:[kg] 转动物体半径r: [m] 转动速度n:[rpm] 达到转动速度n时电机的运行转速nm:[rpm] 负载转动惯量 Jload: [kgm2 ] 负载折算到电机轴处的转动惯量 Jext:[kgm2 ]
SEW MOVIDRIVE-60B(61B)故障代码表
IPOSplusSW限位开关 HW配置(硬件配置)
n登机 起动条件
输出打开 电机 保 护 开关
复制 存储器模块 技术功能
错误代码
型号
0
MOVIDRIVE-60B/61B
品牌 SEW
1
MOVIDRIVE-60B/61B SEW
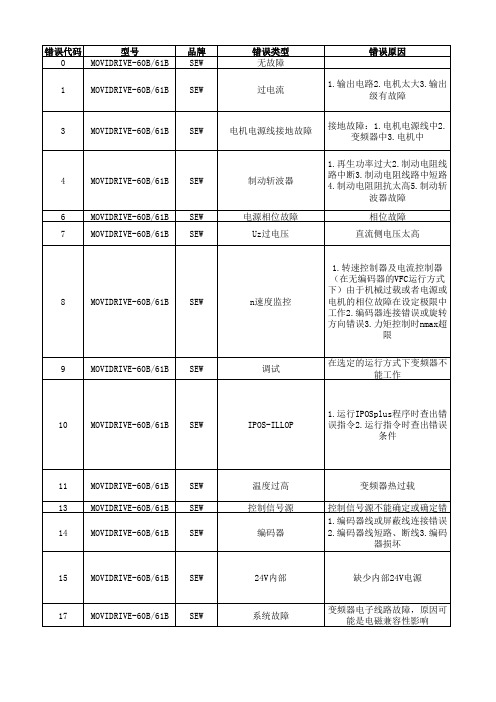
错误类型 无故障
过电流
错误原因
1.输出电路2.电机太大3.输出 级有故障
3
MOVIDRIVE-60B/61B SEW
电机电源线接地故障
接地故障:1.电机电源线中2. 变频器中3.电机中
4
MOVIDRIVE-60B/61B SEW
系统故障 系统故障 系统故障
变频器电子线路故障,原因可 能是电磁兼容性影响
变频器电子线路故障,原因可 能是电磁兼容性影响
变频器电子线路故障,原因可 能是电磁兼容性影响
21 MOVIDRIVE-60B/61B SEW
系统故障
变频器电子线路故障,原因可 能是电磁兼容性影响
22 MOVIDRIVE-60B/61B SEW
检查接地头和屏幕,必要时加以改进如果再次 出现故障,请与SEW维护部门联系
检查接地头和屏幕,必要时加以改进如果再次 出现故障,请与SEW维护部门联系
1.调出出厂设置进行重新设置并重新设置参数 2.如果再次出现故障,请与SEW维护部门联系
3.更换记忆卡
排除故障原因,必要时对端子进行重新编程 1.检查限位开关接线2.交换限位开关接头3.对
SEW变频器MOVIDRIVE培训教程

MDX60/61B变频器培训教程技术部:陈刚 2012-8-27第一部分:变频器的结构、原理与应用目前轿车公司变频器使用类型比较多,常用的有SEW、AB、三菱、伦茨等品牌。
一、变频器的作用与基本原理能实现对交流异步电机的软起动、无级调速、提高运转精度、改变功率因数、节能、过流/过压/过载保护等功能。
变频调速技术的理论基础是三相交流异步电动机的转速与频率成正比,与极对数成反比——n=(1-s)60f/p其基本原理框图(应用最多的类型)是:即三相(单相)交流电经过整流电路转换为直流电源,然后再逆变成三相交流电动机使用的经过调制的等幅脉动直流,脉动直流密度与对应交流应获得幅值成正比。
输出驱动电流使用了脉冲宽度调制技术(PWM)。
由于输出的波形是脉动直流,所以变频器对电网的谐波干扰非常大。
二、变频器速度控制方式变频器常见的频率给定方式主要有:操作器键盘给定、接点信号给定、模拟信号给定、通讯方式给定等。
1、操作键盘给定通过操作键盘给定速度,手工或自动操作启动、停止变频器。
2、接点信号给定通过外部开关接点组合代码来选择速度,而速度要在参数表设置。
3、模拟信号给定包括0-5VDC、(0)1-10VDC、20mA电流、电位器给定等。
4、通讯方式给定通过总线或其它接口,由另一个控制器把速度写入变频器特定的缓冲字中。
三、外部接线下图是一个三菱变频器接线的例子,这是变频器使用极其典型的电路。
图中,使用了接点信号给定的速度输入方式。
三级速度、停止、复位、正转、反转等都由PLC输出控制,运行、异常报警信号接入PLC输入端。
四、工作方式与运行特性变频器由于其控制上的柔性,可以获得多种改良特性。
1、工作方式:基本工作方式有恒转矩、恒功率两种。
(1)恒转矩控制根据转矩与“电压/频率”比值的平方成正比的数学关系,我们知道,要实现恒转矩方式,必须保持U/f为常数。
这就是为什么恒转矩控制方式下,频率下降,输出电压也要跟着同比降低的原因。