Prima Pro 操作原理
简述prim算法的过程
简述prim算法的过程Prim算法是一种用于求解最小生成树的贪心算法,它把一个连通图分割成多个子图,使得每个子图都是一棵最小生成树,且这些子树的联合就是原连通图的最小生成树。
Prim算法是由安德鲁普里姆(Andrew.Prim)在1957年提出的,用于求解最短路径(解决连通度和权重问题)。
Prim算法一般步骤如下:(1)初始化:从图中任选一顶点,作为第一个顶点加入到最小生成树中;(2)循环:从剩余的顶点中,找到最小代价的边,将这条边加入到最小生成树中,并将这条边的顶点也加入到最小生成树中;(3)重复:重复步骤2,直到最小生成树中包括全部的顶点;(4)停止:最小生成树已经构造完成,停止算法的执行。
Prim算法是贪心算法的一种,它每次在可选的边中搜索代价最小的边,加入到最小生成树中,直至所有的顶点都在最小生成树中。
它的一般步骤可表示为:(1)从最小生成树中所有的顶点中,找出一个确定的顶点 u,它的邻居还未加入最小生成树;(2)从u的邻居v中,找出一个代价最小的边(u,v),将这条边加到最小生成树中;(3)将顶点v加入到最小生成树中;(4)重复步骤1到3,直到最小生成树中包括所有的顶点;深入分析Prim算法,我们可以发现它是一种贪心策略,它在设计上采用了“最优化原则”,即每次都选择代价最小的边加入到最小生成树中,而不管这个边是否有利于求解最小生成树的问题,因而贪心算法的实现对“最优策略”的选择是关键。
Prim算法的时间复杂度取决于边的存储结构,如果存储为邻接表,其时间复杂度为O(V2),如果存储为邻接矩阵,其时间复杂度为O(V2+E)。
其中,V为顶点数,E为边数。
Prim算法在现实生活中有着广泛的应用,比如电路设计时,需要求最小生成树,以此达到最短路径、最小花费的目的;另外,它还可以用于网络路由的设计,最小化网络的延迟;此外,它还可以用于求解旅行商问题,最小化客户的费用等等。
总之,Prim算法是一种有效的求解最小生成树的方法,它通过不断地在可选边中寻找代价最小的边,来构建最小生成树;在现实生活中,它也有着广泛的应用。
prom不可编程的逻辑阵列

prom不可编程的逻辑阵列摘要:一、prom不可编程的逻辑阵列简介1.prom的基本概念2.prom不可编程的逻辑阵列的组成二、prom不可编程的逻辑阵列的工作原理1.逻辑阵列的基本原理2.prom不可编程的逻辑阵列的工作流程三、prom不可编程的逻辑阵列的应用领域1.通信领域2.计算机领域3.工业控制领域四、prom不可编程的逻辑阵列的发展趋势1.新材料的研究2.新型制造工艺的开发3.智能化技术的应用正文:prom不可编程的逻辑阵列是一种具有广泛应用前景的新型电子元器件,它主要由prom和逻辑阵列两部分组成。
prom是一种只读存储器,用于存储逻辑阵列的配置信息。
逻辑阵列则是由多个逻辑门组成的阵列,用于实现各种逻辑功能。
prom不可编程的逻辑阵列的工作原理是基于逻辑阵列的基本原理。
逻辑阵列通过配置不同的逻辑门来实现不同的逻辑功能。
prom不可编程的逻辑阵列的工作流程主要包括:接收输入信号、根据prom中的配置信息确定逻辑阵列的工作状态、输出处理结果。
prom不可编程的逻辑阵列在通信领域、计算机领域和工业控制领域都有广泛的应用。
在通信领域,它可用于实现数字信号的处理和调制解调等功能;在计算机领域,它可用于实现CPU和其他硬件设备之间的数据交换;在工业控制领域,它可用于实现各种自动化控制功能。
随着科技的不断发展,prom不可编程的逻辑阵列也将迎来新的发展趋势。
首先,新材料的研究将有助于提高prom不可编程的逻辑阵列的性能,例如提高其工作速度和稳定性。
其次,新型制造工艺的开发将有助于降低prom 不可编程的逻辑阵列的生产成本,提高其市场竞争力。
prime操作手册 091203

Prima膝关节被动运动仪中文操作手册(2009版)目录Prima膝关节被动运动仪1. 适用症 (3)2. 临床优势 (3)3. 设备描述 (3)4. 电源连接:安全第一 (4)5. 安全 (4)6. 启动仪器 (5)7. 使用Kinetec患者衬垫套装 (5)8. 患者安放 (6)9. 脚板架位置 (6)10. 保修 (6)11. 清洁 (6)12. 销毁和回收 (7)13. 故障处理 (7)14. 技术参数 (7)15.符号使用 (8)16. 可选配件 (8)17. 保修 (10)Prima膝关节被动运动仪中文操作说明书1. 适用症●膝关节置换术●骨折(膝盖骨,胫骨,股骨,…)●关节松懈术●髋关节术,包括髋关节置换,髋关节固定,髋关节截骨术,…●韧带修复●关节镜外科(半月板切除术,髌骨切除术,…)●灼伤,化脓性关节炎,…2. 临床优势缩短外伤,炎症及关节活动度修复周期预防关节僵硬加速术后关节活动度的恢复保持关节连接面减少疼痛和水肿推动关节软骨康复缩短住院治疗时间减少止疼药物的摄入及时提供术后连续被动运动禁忌症骨癌,扭曲关节面,麻痹性偏瘫,粉碎性骨折,未受控制性传染。
该设备不适用于患者身高高于2米(6尺7寸),或者低于1.47米(4尺7寸)。
3. 设备描述KINETEC Prima Advance是款膝盖被动运动型设备,伸缩活动范围在-5°到115°之间。
A-下缘支柱B-大腿支柱C-脚板架D-控制面板E-手柄4. 电源连接:安全第一KINETEC Prima Advance是Ⅰ类B型设备。
把KINETEC Prima Advance的电源线(1)接到插座上(电压100伏-240伏,频率50/60赫兹)。
注意:在使用前:-检查外接电源插座是好的,并且接口适合关节运动器的电源线接口。
该运动器的电源线符合现行的电源线标准并含有地线。
-插头必须接到符合标准的插座上。
-插座必须配有地线。
SMARTpropr格兰登士柏机扩

Courtesy Dr. Patrick Tseng
Courtesy Dr. Patrick Tseng
机用锉使用顺序
使用标准的10号K锉探查和疏通根管,直至挫针能够在根管内平滑的
移动。
(Sx)冠部预扩大 使用同一根10号K锉,配合根尖定位仪确定工作长度
使用PathFile™ #013 达到工作长度
X-SMART 开创根管治疗的艺术
X-Smart 特点
• 用户界面友好 – 宽大的液晶屏,简单的
操作面板
• 安全 – 扭矩控制、自动回旋功能 • 方便 – 手机轻便,上有开关按钮 • 灵活 – 2种供电方式 (充电电池或常规电
源供电)
X-SMART 控制面板
➢设计简洁,界面友好,易 于操作、设置
精修锉Finishing Files (F1, F2, F3, F4, F5)
修整根管根尖部分
Shape the Apical part of the canal
手用PROTAPER
S1 17
S2 20
Sx 19
3mm
F1
20-7%
F2
25-8%
F3
30-9%
F4
40-6%
F5
50-5%
所有的锉都有21、25、31mm三种规格 三种长度的锉切割部分设计相同
。
Glyde凝胶规格
Item#
English Description
Chinese Description
A0901.000.000
GLYDE FILE PREPSYRINGE KIT
Glyde齿科根管调节剂 注射器装 3*3ml
A0902.000.000
GLYDE FILE PREPINTRO PKG
Prima Pro 质谱仪操作简介

Repeller Voltage (反射板电压)0 ~ 10 V
Source Current (离子源电流)捕获电流的2到15倍
Source Temperature (离子源温度)
Trap Current (捕获电流)10μA ~ 100μA
Analyser 分析器 ASU Controller Status (分析器电源单元控制器状态) Cabinet Temperature (机柜温度)10°C ~ 35°C Electronics Temperature (电子机箱温度)10°C ~ 45°C Magnet Controller Status (磁场控制器状态) Mass Filter (质量过滤器) Pressure Set Point (压力设定点) System Pressure (系统压力)通常为5 x 10-6mbar,但是取决于应用 System Pressure Trip (系统压力联锁) Turbo Disable (禁止涡轮分子涡工作) Turbo Motor Current (涡轮分子泵电机电流) Turbo Operating Hours (涡轮分子运行小时) Turbo Speed 涡轮分子泵转速 Turbo Speed Interlock(涡轮分子泵泵速联锁) Vacuum (真空度) Vent Valve (出口阀)
i) 如果系统压力(真空度)已经达到正常值,而灯丝还没有接通,请按下文在 控制中心“Control Center”中手动接通,如果不能接通说明灯丝已断。
2. 关机
一般地说,在不工作时最好让仪器保持运转而不要老是关机。即使仪器有几周不 使用也是如此。然而在进行常规维护等工作时还是要关机的。应当依此按下列步 骤操作。
Inlet
maxdeapro手册
maxdeapro手册Maxdeapro是一款功能强大的手截图工具,它具有简单易用、高效快捷的特点,可以帮助我们进行屏幕截图、录制、编辑、分享等操作。
在本手册中,将详细介绍Maxdeapro的安装、界面布局、常用功能和操作步骤等内容。
一、安装Maxdeapro当我们需要使用Maxdeapro时,可以在官方网站上进行免费下载。
下载完成后,双击安装文件,按照提示完成安装过程。
二、界面布局安装完成后,打开Maxdeapro,我们会看到一个简洁、直观的界面布局。
主要分为菜单栏、工具栏、截图区域、预览区域和状态栏五个部分。
1.菜单栏:位于界面的顶部,包含了文件、编辑、工具、选项、帮助等功能模块,通过点击对应的功能模块,可以打开相应的功能窗口。
2.工具栏:位于菜单栏下方,包含了常用的操作按钮,如截图、录像、编辑等,通过点击相应的按钮,可以进行对应的操作。
3.截图区域:位于界面的左侧,用于实时显示当前截图窗口的内容。
可以根据需要,调整截图窗口的大小、位置。
4.预览区域:位于界面的右侧,用于显示已经截图或录像完成的内容。
在完成截图或录像后,可以在这里进行预览和编辑。
5.状态栏:位于界面的底部,显示了当前的操作状态,如快捷键、截图模式、微信二维码等。
三、常用功能Maxdeapro提供了丰富的功能,以下是其常用的功能介绍。
1.截图功能:Maxdeapro支持三种截图模式,分别是全屏截图、区域截图和窗口截图。
用户可以根据需求选择不同的截图模式,并且可以自定义截图的快捷键。
2.录制功能:Maxdeapro可以进行屏幕录制,支持全屏录制和区域录制两种模式。
用户可以选择录制画面的分辨率、帧率,并且可以选择是否录制声音。
3.编辑功能:Maxdeapro提供了多种编辑工具,如画笔、标注、马赛克、文字等,可以对截图或录像进行编辑和标注。
编辑完成后,支持保存为图片、复制到剪贴板和直接分享等操作。
4.分享功能:Maxdeapro支持将截图或录像分享到社交平台,如微信、QQ、微博等。
Prima普瑞码激光切割机
LASER CUTTING MACHINEFOREWORD 前言PLA TINO is a highly flexible and reliable machine designed and developed for the needs of sheet metal processing industry. PLA TINO cuts a wide range of materials and thicknesses with high speed and precision without the need for manual adjustment.PLA TINO机床是专为金属板金加工设计和开发的一款高度灵活和可靠的激光切割机床。
PLA TINO可以在无需人工调整的情况下自动实现从薄板到厚板的全范围高速,高精度加工。
The following are its main highlights:以下是机床的主要特点:1.It is unitised:它的结构是整体式的:it does not require foundations 无需准备地基it has a minimum footprint 占地面积最小it is easily and quickly installed 可简单快速地安装it is transported in a single block 运输时可装在一个集装箱内2.It is a flying optics system:它是飞行光路式激光切割系统:speed and accuracy independent from the workpiece weight运动速度和精度同加工工件的重量无关the linear axes stokes are: X=4000 mm, Y=2000 mm, Z=150 mm线性轴行程为:X=4000mm, Y=2000mm,Z=150mmthe footprint is the smallest with respect to its strokes同其它具有相同行程的机床相比,它的占地面积是最小的3.It has a cantilever architecture:它的结构是悬臂式的:total accessibility from 3 sides可以从三个方向完全进入机床possibility of manual loading/unloading of thin sheets without using the automatic pallet changer即使没有自动交换工作台也可轻松地实现板材的手工上下料4.It has high dynamics:它是高动态性能的机床:linear axes combined speed of 110 m/min线性轴的最大定位速度为110m/minacceleration of 1.2 g for single axis单轴最大加速度为1.2g5.It has the best accuracy on the market: 它的精度是同类产品中最高的:Pa and Ps = 0.03 mm (full stroke) according to VDI/DGQ 3441 standards.按VDI/DGQ 3441标准测量其全行程内Pa=0.03mm, Ps=0.03mm6.Its focusing head allows enormous production flexibility and reliability, featuring:它的加工头满足灵活和稳定大批量生产要求,其特点为:the capacitive sensor电容式非接触传感器the F-axis for the automatic and programmable control of the focal position自动可编程控制焦点位置的数控轴F轴the rapid lens change with drawer system拔插式快速透镜更换系统SIPS (Safe Impact Protection System) for protection against collision with fixtures orworkpieces防碰撞安全保护系统SIPS避免切割头同零件和夹具的碰撞损害。
SMART propr 格兰 登士柏机扩

根管内感染微生物主要集中于 根管中上部
• 有效控制根管内微生物 • 减少根管预备后局部疼痛的发生
根管钙化主要存在于根管冠1/3 • 首先清除冠部阻塞,器械更易进入根管尖部
弯曲度减小 冠部被敞开 3–4支器械,固定顺序
• 器械在弯曲根管尖部产生弹力减少,降低根管偏移 程度
• 冲洗针头能到达较深部位,可加强根管冲洗效果 (Instrumentation alone reduces the number of micro-organisms by 50%.)
• 建议使用专业根管马达 • 使用手法:提拉法,每根针在根管内不能超过5秒,达到WL不要超过1秒 • 避免加压,反复大量冲洗。 • 使用根管润滑剂 • 换针换程序 • 锉针使用记录次数,有拉伸,变形,裂纹等马上丢弃。
ProTaper治疗锉临床操作
• 用10 & 15号手用锉
探查根管
• 探查深度为距X片根
Propex II – 屏幕显示情况
从冠部1/3根管开始全程跟踪
根尖部位显示放 大,便于临床操作
另有声音信号配合视频追踪信号
屏幕显示
“越过”显示
• 红色段和警告信号表示锉刀已
经越过顶点。牙齿图标上的光 标显示“越过”。
演示模式
可利用内置的演示模式熟悉设备和演示设备操作 1.断开测量电缆或充电器,关闭设备。
Glyde凝胶的反应机理
EDTA
Ca2+ salts from calcified areas
EDTA将钙化区域脱钙 钙化组织变软 根管易于成型扩大
Glyde凝胶反应机理 过氧化脲
次氯酸钠
氧气
这种初生氧的气泡作用,可将根管中的残屑,牙本质小管中 的阻塞物轻易清除。
java prim生成迷宫原理

java prim生成迷宫原理以Java Prim生成迷宫原理为标题的文章在游戏开发中,迷宫是一种常见的关卡设计元素。
迷宫是由一系列相互连接的路径和墙壁组成的,玩家需要通过解谜和探索来找到通往出口的路径。
而生成迷宫的方法有很多种,其中一种常用的方法就是使用Prim算法。
Prim算法是一种用于生成最小生成树的算法,它也可以被用于生成迷宫。
迷宫可以看作是一个网格结构,每个单元格可以是路径或墙壁。
生成迷宫的目标是通过移除某些墙壁,使得每个单元格之间都能够连通,同时保证迷宫的连通性和复杂度。
Prim算法的基本思想是从一个起始点开始,逐步扩展迷宫的路径。
具体步骤如下:1. 随机选择一个起始点,将其标记为已访问。
2. 将起始点的所有相邻墙壁加入到一个优先级队列中,其中权重是墙壁的代价。
3. 从队列中取出权重最小的墙壁,如果该墙壁两边的单元格都已经访问过,则忽略该墙壁;否则,将该墙壁移除,将两个单元格标记为已访问,并将与这两个单元格相邻的墙壁加入到队列中。
4. 重复步骤3,直到队列为空。
通过这样的逐步扩展,最终可以生成一个连通的迷宫。
Prim算法的关键在于选择权重最小的墙壁,这样可以保证生成的迷宫路径较短,同时也增加了迷宫的复杂度。
在Java中实现Prim算法生成迷宫的过程相对简单。
首先,我们需要定义一个迷宫的数据结构,可以使用二维数组或者图来表示。
然后,我们需要实现一个优先级队列来存储墙壁,这里可以使用Java 中的PriorityQueue类。
最后,我们按照Prim算法的步骤逐步扩展迷宫的路径,并将生成的迷宫保存起来供游戏使用。
下面是一个简单的Java代码示例,用于实现Prim算法生成迷宫:```javaimport java.util.*;public class MazeGenerator {private int[][] maze;private int size;public MazeGenerator(int size) {this.size = size;this.maze = new int[size][size];}public void generateMaze() {PriorityQueue<Wall> queue = new PriorityQueue<>(); Random random = new Random();int startX = random.nextInt(size);int startY = random.nextInt(size);maze[startX][startY] = 1;addWalls(queue, startX, startY);while (!queue.isEmpty()) {Wall wall = queue.poll();int x = wall.x;int y = wall.y;if (maze[x][y] == 0) {maze[x][y] = 1;int nx = wall.nx;int ny = wall.ny;maze[nx][ny] = 1;addWalls(queue, nx, ny);}}}private void addWalls(PriorityQueue<Wall> queue, int x, int y) {if (x > 0 && maze[x - 1][y] == 0) {queue.add(new Wall(x, y, x - 1, y, 1));}if (x < size - 1 && maze[x + 1][y] == 0) {queue.add(new Wall(x, y, x + 1, y, 1));}if (y > 0 && maze[x][y - 1] == 0) {queue.add(new Wall(x, y, x, y - 1, 1));}if (y < size - 1 && maze[x][y + 1] == 0) {queue.add(new Wall(x, y, x, y + 1, 1));}}private class Wall implements Comparable<Wall> {int x;int y;int nx;int ny;int cost;public Wall(int x, int y, int nx, int ny, int cost) {this.x = x;this.y = y;this.nx = nx;this.ny = ny;this.cost = cost;}@Overridepublic int compareTo(Wall other) {return this.cost - other.cost;}}}```在这个示例中,我们使用二维数组来表示迷宫,其中0表示墙壁,1表示路径。
元pro 使用手册
元pro 使用手册摘要:一、元pro 使用手册简介二、元pro 的功能特性1.强大的AI 语言处理能力2.多模态输入输出3.支持多种应用场景三、元pro 的使用方法1.连接电源与网络2.安装与配置3.操作界面与功能模块四、元pro 的维护与升级1.日常维护2.软件升级五、元pro 的安全与隐私保护1.数据安全保护2.隐私政策与合规性六、元pro 的客户支持与服务1.常见问题解答2.客户服务渠道正文:【元pro 使用手册简介】元pro 使用手册是一本针对元pro AI 语言处理设备的操作指南,旨在帮助用户更好地了解设备的功能特性、使用方法以及维护与升级等方面的信息。
通过本手册,用户可以充分发挥元pro 的强大性能,实现高效便捷的工作与生活。
【元pro 的功能特性】元pro 具备强大的AI 语言处理能力,能够对多种自然语言进行快速准确的理解与生成。
多模态输入输出功能使得元pro 可以处理文本、语音、图像等多种形式的信息,满足用户在不同场景下的需求。
此外,元pro 支持多种应用场景,如智能问答、智能推荐、智能翻译等,助力用户在各个领域实现智能化升级。
【元pro 的使用方法】要开始使用元pro,首先需要连接电源与网络,确保设备正常运行。
接下来,根据设备接口与网络环境进行相应的安装与配置。
元pro 的操作界面简洁直观,用户可以轻松上手。
通过操作界面,用户可以访问设备的各种功能模块,实现对元pro 的灵活控制。
【元pro 的维护与升级】为了确保元pro 的稳定运行,用户需要定期进行日常维护,如清洁设备、检查连接线等。
同时,为了不断提升元pro 的性能,用户需要关注软件升级通知,及时更新设备软件。
【元pro 的安全与隐私保护】元pro 高度重视用户数据的安全与隐私保护。
设备采用了严格的数据保护措施,确保用户数据的安全性和隐私性。
同时,元pro 遵循相关法律法规,保障用户的隐私政策与合规性。
【元pro 的客户支持与服务】在使用元pro 过程中,用户可能会遇到一些问题。
简述prim算法中的贪心选择策略
prim算法是一种解决最小生成树问题的常用算法,它通过贪心选择策略来逐步构建最小生成树。
在prim算法中,贪心选择策略是指在每一步选择当前顶点和不在最小生成树中的顶点之间的最短边,然后将该边的另一个顶点加入到最小生成树中。
下面将对prim算法中的贪心选择策略进行简要的介绍。
一、prim算法的贪心选择策略1.1 概述prim算法中的贪心选择策略是基于当前最小生成树的顶点集合和不在最小生成树中的顶点集合之间的最短边来进行选择。
每一步,都选择连接最小生成树和不在最小生成树中的顶点集合之间的最短边,并将该边的另一个顶点加入到最小生成树中,直到最小生成树包含了所有的顶点。
1.2 过程具体来说,prim算法的贪心选择策略可以描述为以下几个步骤:1. 初始化,选择一个起始顶点加入最小生成树中,将其标记为已访问。
2. 每一步,从已经访问的顶点集合和未访问的顶点集合之间选择最短的边,将其连接的顶点加入到已访问的顶点集合中。
3. 重复进行步骤2,直到所有的顶点都加入到了最小生成树中。
1.3 算法流程prim算法的贪心选择策略可以通过以下流程来进行描述:Step 1: 从任意一个顶点开始,将其加入到最小生成树中,标记为已访问。
Step 2: 从已访问的顶点集合和未访问的顶点集合之间选择最短的边,将其连接的顶点加入到已访问的顶点集合中,标记为已访问。
Step 3: 重复进行Step 2,直到所有的顶点都加入到了最小生成树中。
1.4 示例举个简单的例子来说明prim算法中贪心选择策略的执行过程:假设有以下图G,顶点集合为V,边集合为E:V = {A, B, C, D, E}E = {(A, B, 2), (A, C, 3), (B, C, 1), (B, D, 4), (C, D, 5), (C, E, 6), (D, E,7)}按照prim算法的贪心选择策略,选择顶点A作为起始顶点,然后依次选择最短的边或者连接已访问的顶点和未访问的顶点的边,直到所有的顶点都加入到了最小生成树中。
prim——精选推荐

primprim算法是计算最⼩⽣成树的⼀种算法。
运算⽅法是任取⼀个点,以这个点为集合开始,然后对所有点与这个点的距离进⾏更新,找出离这个集合最近的点,然后把这个点放进这个集合(所以每⼀次运算的时候都要判断⼀下这个点是否在这个集合⾥,所有要⽤到⼀个vister数组),然后再以这个集合继续寻找离这个集合最近的点,直到没有点存在。
输⼊:N个点和邻接矩阵1 #include<iostream>2 #include<cstdio>3 #include<cstring>4using namespace std;5//==============================================================================6void init();7void prim();8//==============================================================================9int map[105][105],vister[105],dis[105],N,ans=0;10//==============================================================================11void init()12 {13 cin>>N;14for(int i=1;i<=N;i++){15for(int j=1;j<=N;j++){16 cin>>map[i][j];17 }18 }19 memset(dis,0x3f3f3f3f,sizeof(dis)); //对距离初始化为⽆穷20 }21//==============================================================================22void prim()23 {24 //对这个点的距离初始化为0.25 dis[1]=0;26for(int i=1;i<=N;i++){27int MIN=0x3f3f3f3f; //寻找最⼩值28int x; //最⼩值得坐标29for( int j=1;j<=N;j++ ){30if( vister[j]==0 && MIN>dis[j] ){31 MIN=dis[j];32 x=j;33 }34 }35//======================36 ans+=dis[x]; //将找到的最⼩边加⼊答案⾥37 vister[x]=1; //标记这个点被访问38//======================39for(int j=1;j<=N;j++){ //循环更新距离数组40if( dis[j]>map[x][j] && map[x][j]>0 && vister[j]==0 ){41 dis[j]=map[x][j];42 }43 }44 }45 }46//==============================================================================47int main()48 {49 init();50 prim();51 cout<<ans;52//system("pause");53return0;54 }。
Prima Pro 质谱仪操作简介
• 输入所需设置值后按 Enter • 点击左向或右向箭头分别设置成更低或更高的值 • 沿调节栏拖动位置指示器 质谱仪的调试过程需对各种不同的分析仪参数进行调整以便得到一个稳定的、强 的平顶峰。一旦调试完成之后,在相当长的一段时间内仪表将得到稳定的测量结 果。
f) 当分析仪真空度达到正常水平,而灯丝发射电子时,在底部工具栏上的仪表 状态灯可指示出其状态。该状态灯是一可确认的报警指示灯。绿灯表示仪表 处于正常状况,所测的各项仪表参数均在报警极限范围内。若任何一个所测
1
Prima Pro 质谱仪操作简介
仪表参数超过其设置的报警极限范围,仪表状态灯都会变为红色,表示仪表 中有故障。若状态灯显示成不带颜色的灰色,这就表示或者本轮仪表参数测 量过程未完成,或者PC主机与质谱仪的控制处理器没有连接好。 g) 当气压未到真空联锁值以下时,发射功能不会打开,离子能量也维持在零。 h) 鼠标单击仪表状态工具栏按钮,将会打开仪表状态窗口,它显示出每一个仪 表参数的报警状态。点击一特定参数状态灯将显示出当前值,报警极限和报 警确认按钮,若所有参数在规定值内,但状态灯是红色的,点击“确认所有” (acknowledge a11)按钮将使仪表状态灯改变为绿色。在开始进行预定的分 析前,必须等到所有参数均在极限值内(状态灯是绿色Green)。
Inlet
进样系统
RMS Body Temp(RMS进样系统温度)
RMS M3 Ambient Temperature (RMS M3环境温度)
RMS M3 Controller Status (RMS M3控制器状态)
RMS M3 Digital Input 2 (RMS M3数字输入2)
Meccanica S.p.A 高速计算软件用户指南说明书
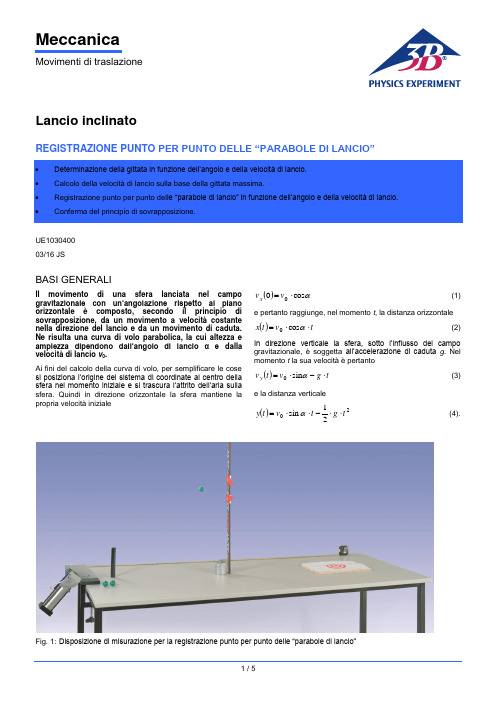
MeccanicaMovimenti di traslazioneLancio inclinatoREGISTRAZIONE PUNTO PER PUNTO DELLE “PARABOLE DI LANCIO”UE1030400 03/16 JSBASI GENERALIIl movimento di una sfera lanciata nel campo gravitazionale con un’angolazione rispetto al piano orizzontale è composto, secondo il principio di sovrapposizione, da un movimento a velocità costante nella direzione del lancio e da un movimento di caduta. Ne risulta una curva di volo parabolica, la cui altezza e ampiezza dipendono dall’angolo di lancio α e dalla velocità di lancio v 0.Ai fini del calcolo della curva di volo, per semplificare le cose si posiziona l’origine del sistema di coordinate al centro della sfera nel momento iniziale e si trascura l’attrito dell’aria sulla sfera. Quindi in direzione orizzontale la sfera mantiene la propria velocità iniziale()αcos 00⋅=v v x (1)e pertanto raggiunge, nel momento t , la distanza orizzontale()t v t x ⋅⋅=αcos 0(2)In direzione verticale la sfera, sotto l’influsso del campo gravitazionale, è soggetta all’accelerazione di caduta g . Nel momento t la sua velocità è pertanto()t g v tv y ⋅-⋅=αsin 0(3)e la distanza verticale()2021sin t g t v t y ⋅⋅-⋅⋅=α (4).Fig. 1: Disposizione di misurazione per la registrazione punto per punto delle “parabole di lancio”ELENCO DEGLI STRUMENTI1 Apparecchio di lancio1002654 (U10360) 1 Supporto per apparecchio di lancio1002655 (U10361) 1 Scala per altezza, 1 m 1000743 (U8401560) 1 Set indicatori per scale 1006494 (U8401570) 1 Piede a barilotto, 1 kg 1002834 (U13265) 1 Metro a nastro tascabile, 2 m1002603 (U10073)La curva di volo della sfera ha forma parabolica in quanto soddisfa l’equazione()()220cos 21tan xv g x x y ⋅⋅⋅-⋅=αα (5)Nel momentogv t αsin 01⋅=(6).la sfera raggiunge il punto più elevato della parabola e nel momentogv t αsin 202⋅⋅= (7).ritorna nuovamente all’altezza di partenza 0. L’altezza della parabola è quindi()α2201sin 2⋅⋅==gv t y h(8).e l’ampiezza()ααcos sin 2202⋅⋅⋅==gv t x s(9).Nell’esperimento si misurano punto per punto le curve di volo di una sfera di legno in funzione dell’angolo e della velocità di lancio con l’impiego di una scala per altezza con due indicatori (ved. fig. 3). La componente orizzontale x della curva di volo si ricava dalla distanza X orizzontale rispetto al bordo destro del supporto determinata con un metro a nastro:mm 110+=X x(10).La componente verticale y si calcola a partire dalle posizioni Y 1 e Y 2 dei due indicatori con l'assunzione che la sfera voli esattamente in mezzo. A questo proposito si deve considerare che il punto zero della misurazione dell'altezza corrisponde all'altezza del bordo superiore del tavolo, mentre la sfera parte 37,5 mm al di sopra dello stesso:mm 5,37212-+=Y Y y (11).Lo scostamento massimo del valore calcolato dal valore reale è pari amm 5,12212--=∆Y Y y (12).MONTAGGIO∙Bloccare il supporto per l'apparecchio di lancio sulla parte frontale di un tavolo lungo almeno 2 m e montare l'apparecchio di lancio secondo le istruzioni per l'uso ∙ Srotolare il metro a nastro - a partire dal bordo destro del supporto per l'apparecchio di lancio - e fissarlo sul tavolo. ∙Disporre sul tavolo il bersaglio di figura 2 su una base di 25 mm di spessore a una certa distanza dall'apparecchio di lancio.∙ Montare posteriormente una parete "di raccolta" per la sfera che rimbalza.Fig. 2: Bersaglio per l'atterraggio della sferaFig. 3: Rappresentazione schematicaAVVERTENZE PER LA SICUREZZAAnche se l'energia di lancio della sfera è molto bassa, la sfera non deve in nessun caso colpire gli occhi.∙Non guardare mai nella canna dell'apparecchio di lancio!∙Si deve controllare la posizione della sfera soltanto attraverso i fori laterali dell'apparecchio di lancio.∙Prima del lancio accertarsi che non si trovino persone nella traiettoria.ESECUZIONEDeterminazione della gittata in funzione dell'angolo di lancio∙Impostare l'angolo di lancio α = 30°.∙Disporre il bersaglio a circa 1 m di distanza.∙Caricare l'apparecchio di lancio secondo le istruzioni per l'uso fino al tensionamento minimo.∙Lanciare la sfera e seguire la traiettoria della sfera.∙Spostare il bersaglio verso il punto di impatto della sfera.∙Ripetere il lancio della sfera e correggere la posizione del bersaglio finché la sfera non atterra nel centro del bersaglio.∙Determinare la distanza X del centro del bersaglio e inserirla nella tab. 1.∙Effettuare in successione la misurazione anche per gli angoli di lancio α = 45°, 60° e 75°.∙Nella Tab. dalle distanze X secondo (10) calcolare le gittate s.Determinazione della gittata massima in funzione della velocità di lancio:∙Impostare l'angolo di lancio α = 45°.∙Caricare l'apparecchio di lancio secondo le istruzioni per l'uso fino al tensionamento medio.∙Lanciare la sfera e seguire la traiettoria della sfera.∙Spostare il bersaglio verso il punto di impatto della sfera.∙Ripetere il lancio della sfera e correggere la posizione del bersaglio finché la sfera non atterra nel centro del bersaglio.∙Determinare la distanza X del centro del bersaglio e inserirla nella tab. 2.∙Effettuare la misurazione anche per il massimo tensionamento della molla.∙Nella tab. 2 dalle distanze X secondo (10) calcolare le gittate massime s max.Registrazione punto per punto delle “parabole di lancio” in funzione dell’angolo di lancio.∙Impostare l'angolo di lancio α= 30° e posizionare il bersaglio in modo che la sfera atterri nel centro con tensionamento minimo della molla.∙Montare la scala per altezza nel piede a barilotto e disporla a X = 100 mm∙Disporre la coppia di indicatori a Y1 = 110 mm e Y2 = 140 mm.∙Lanciare la sfere con il minimo tensionamento della mollae verificare se atterra senza impedimenti nel centro delbersaglio.∙Correggere eventualmente la posizione dell'indicatore finché la sfera non atterra nel centro del bersaglio.∙Inserire i valori X, Y1 e Y2 nella tab. 3 e in base ad essi calcolare x, y e ∆y.∙Aumentare le distanze X in stadi da 50 mm e correggere rispettivamente la posizione dell'indicatore finché la sfera con tensionamento minimo della molla atterra nel centro del bersaglio.∙Effettuare le misurazioni anche per gli angoli di lancio α = 45°, 60° e 75° e riportare i risultati nelle tab. 4, 5 e 6.∙Se è disponibile sufficiente spazio per gli esperimenti eseguire misurazioni anche per altri tensionamenti della molla.ESEMPIO DI MISURAZIONEDeterminazione della gittata in funzione dell'angolo di lancioTab. 1: Gittata in funzione dell'angolo di lancio alla minima velocità di lancioTab. 2: Gittata massima in funzione della velocità di lancioRegistrazione punt o per punto delle “parabole di lancio” in funzione dell’angolo di lancio.Tab. 3: coordinate della curva di volo rispetto all'angolo di lancio α = 30°:Tab. 4: coordinate della curva di volo rispetto all'angolo di lancio α = 45°:Tab. 5: coordinate della curva di volo rispetto all'angolo di lancio α = 60°:Tab. 6: coordinate della curva di volo rispetto all'angolo di lancio α = 75°:3B Scientific GmbH, Rudorffweg 8, 21031 Amburgo, Germania, ANALISIDeterminazione della gittata in funzione dell'angolo di lancioLa figura 4 rappresenta graficamente la dipendenza della gittata s dall'angolo di lancio α sulla base dei valori di misura della tab.1. La curva disegnata attraverso i punti di misura è stata calcolata per v 0 =3,42 m/s secondo (9).α°s / mFig. 4: Gittata in funzione dell'angolo di lancioIn corrispondenza dell’angolo di lancio α = 45° viene raggiunta l’ampiezza s max di tutte le curve di volo.Determinazione della gittata massima s max in funzione della velocità di lancio v 0:Dalla gittata massima s max ottenuta a 45° può essere calcolata la velocità di lancio v 0. Grazie all’equazione 9, valemax 0s g v ⋅=I risultati sono riportati nella tab. 2.Registr azione punto per punto delle “parabole di lancio” in funzione dell’angolo di lancio.La fig. 5 mostra le curve elencate nelle tab. da 3 a 6 in rappresentazione grafica. Un'analisi precisa mostra che le curve di volo si scostano leggermente dalla forma parabolica, perché si deve considerare l'attrito dell'aria della sfera.x / c m y / c m5Fig. 5: Parabole di lancio misurate e calcolate tenendoconto dell’attrito dell’aria a velocità di lancio minima e a diversi angoli di lancio.。
在线质谱仪 说明书

在线质谱仪——石油化工工业应用经过现场验证的技术,全球广泛安装快速、准确、全面的气体分析数据确保优化控制系统实时更新,从而优化生产装置,并获得最大化收益。
Thermo Scientific 在线质谱仪广泛应用在全球各地的石油化工装置,优化化工生产过程以及监控气体泄漏。
新一代Thermo Scientific Prima PRO 和Sentinel PRO 在线质谱仪满足了当今现代化综合型化工厂生产过程的特殊应用需求,确保提高各生产装置(图1)的操作能力。
利用在线质谱仪的快速分析优化工艺过程甲基叔丁基醚醋酸乙烯合成气乙烷丙烷丙稀丁二烯丁烯RPG 甲醇氨低硫柴油氢聚氯乙烯二氯乙烯高密度聚乙烯线性低密度聚乙烯环氧乙烷乙二醇聚丙烯合成橡胶聚丁烯苯PB装置ABS装置PP装置EO-EG装置PE装置PVC装置制氢装置PB装置合成氨装置醋酸装置MTBE装置甲醇装置EDC装置芳烃装置天然气烯烃装置天然气处理装置蒸汽重整图1 石油化工工艺流程图表明:在线质谱仪可使下列各生产装置获得最大收益Thermo Scientific Prima PRO和Sentinel PRO:开启质谱新时代依托超过30年在线质谱仪的成功研发应用经验,新一代Thermo Scientific Prima PRO和Sentinel PRO在线质谱仪可从容应对石油化工应用的众多挑战,其中包括:●天然气处理●烯烃生产●裂解炉优化●环氧乙烷/ 乙烯乙二醇●聚烯烃生产●合成氨●有毒挥发性有机化合物(VOC)的泄漏Prima PRO在线质谱仪通过对多流路气体的精确分析,以及实践证明的更快、更全面的在线气体成分分析能力,可以提高产量。
维护量少、易于操作并且可提供可靠、实时的数据到DCS系统,从而确保投资回报率。
基于Prima PRO相同的操作平台,Sentinel PRO环境质谱仪以其众多同样的优势,被设计用于满足微量泄漏环境监测的需要。
半连续监测60-120个取样点及高灵敏度的检测能力,确保可靠的泄漏检测,提高生产装置的安全性和生产制度的规范性。
primada 原果慢磨原汁寶(PSJ-250)使用說明書说明书

表示禁止拆卸1. 填料口4. 原汁蓋可以分離2. 容器蓋3. 原汁提取容器7. 主機5. 果渣杯6. 原汁杯8. 旋轉刮壁器9. 過濾網 10. 螺旋軸11. 推料杆12. 清洗刷步驟 1原汁提取容器套件安裝方法將各部分上的 標示點對準按順序裝好,然後與容器蓋上的 標示點對準後,壓緊即可。
步驟 2原汁提取容器套件和主機的安裝方法把提取容器套件放在主機上面,將原汁提取容器套件的▼標示點和主機的▲對準後壓緊,將容器蓋以順時針方向旋轉到"關"位置就安裝好了。
注意矽膠塞沒有完全塞好的話容易造成提取的原汁量較少或是漏出注意如果螺旋軸沒有完全裝好,容器的蓋子將無法蓋上2請將旋轉刮壁器裝上過濾網後將過濾網和原汁提取容器上的 ● 標示點對齊安裝4請將原汁提取容器和容器蓋上的各個 ●標示點對準後,壓緊即可9TIP請按照圖示方法用單手或雙手握住蓋子向順時針方向旋轉5原汁蓋可以拆卸把提取容器套件放在主機上面,將原汁提取容器套件的▼標示點和主機的▲對準後壓緊,將容器蓋以順時針方向旋轉到"關"位置就安裝好了。
原汁機使用原汁蓋能夠製作混合果汁,防止流出,也可進行簡易清洗●關上原汁蓋榨汁,可以將水果蔬菜包括牛奶等液體和豆,香蕉等放入製作可以防止殘餘的果汁流出●原汁蓋關上的狀態下加水可以進行簡易清洗原汁和果渣全部排出後請按停止開關●如果果渣還沒有全部排出的情況下停機,蓋子會打不開榨完汁後繼續空轉30秒左右,使機器裡面的渣滓全部排出停止↔正轉操作反復2 - 3次後,按住蓋子上部的13正转反转充分理解原汁機的榨汁原理,特性,根據榨汁材料的不同掌握榨汁要領並活用,則可以體驗更加健康的原汁果汁原汁機是利用螺旋軸低速擠壓榨汁的方法,採用了果汁和果渣自動分離的新專利技術,適合榨汁纖維均勻分佈,水分多的材料冷凍的材料、有核的材料、肉質硬的材料、纖維多的材料等因材料的性 質不同其榨汁方法都不一樣。
所以要根據不同材料的榨汁要領去榨汁, 才能達到最佳的榨汁效果167請不要握住蓋子來移動主機,請一定握住主機(把手部位)來移動機器請將原汁提取容器套件向上提起,再將容器整個取下注意● 使用後,如果不馬上清洗,殘留物會變乾附著不僅使拆卸和清洗變困難,而且還會使性能降低,請注意● 原汁提取容器套件的拆法很簡單,放在洗碗池內,沖一下自來水就自然分離● 螺旋軸軸心裡面的水要擦乾5請在自來水下將容器底部的矽膠塞打開清洗參考小蘇打或廚房用天然去污劑放一兩滴在水中,浸泡3 0分鐘左右可以洗的更乾淨注意3矽膠塞清洗後的組裝矽膠環清洗後的安裝<矽膠環>可以拆卸清洗清洗後將矽膠環對準槽,寬的一邊朝上往下如圖示安裝使用原汁蓋清洗後的安裝<原汁蓋>可以拆卸清洗清洗後,將原汁蓋的矽膠塞裝好,23用法:只要將新鮮水果冰凍6小時以上,然後放入慢磨機中即可製作出天然美味的水果雪糕19※ 當使用雪糕杯時,請保持原汁蓋開啟狀態雪糕杯容器套件和主機的安裝方法容器蓋螺旋軸雪糕杯原汁提取容器● 將容器套件上的▼和主機上的▲對齊壓緊● 將容器蓋以順時針方向旋轉到"關"位置注意:製作水果雪糕的食材以軟質型較佳冰凍過硬的食材請先解凍5-20分鐘,過長並須將水果的皮及籽去掉,否則不適用。
prom原理范文

prom原理范文PROM,全称为Programmable Read-Only Memory,即可编程只读存储器,是一种可以只读访问但可以通过编程进行存储的存储器技术。
PROM是一种非易失性存储器,其中存储的信息在供电断开后仍然保持不变。
PROM的工作原理是利用内部的非挥发性存储单元存储数据。
在制造PROM芯片时,内部的存储单元通过快熔断控制线与逻辑控制线连接在一起。
在制作过程中,制造商根据特定的需求将设计好的存储模式刻写到芯片中。
这个过程被称为编程或刻写。
PROM的存储单元由晶体管电路组成,每个存储单元都有两个状态:导通或不导通。
逻辑控制线连接到每个存储单元的栅极,决定该存储单元是否处于导通状态。
在编程过程中,根据需要将特定的存储单元设置为导通或不导通。
在运行时,PROM芯片上的每个存储单元都有一个对应的地址。
当进行读操作时,根据需要的地址,通过逻辑控制线对存储单元进行选择,然后通过输出线将存储单元的状态输出给外部电路。
因为内部存储单元是非挥发性的,所以读取到的数据将保持不变。
PROM的最大优点是可以通过编程一次性地存储信息,然后可以以高速读取该信息。
由于存储器的结构已经在制造过程中确定,因此它的成本相对较低。
此外,PROM还可以通过物理方式将存储模式改变为新的编程模式,以重新使用PROM芯片。
然而,PROM也有一些限制。
首先,一旦PROM存储单元被编程,就无法再被修改。
这使得PROM在存储大量且需要频繁更新的数据时不太合适。
其次,制造商需要在生产过程中为每个PROM芯片编程,这可能带来额外的成本和时间。
为了克服PROM的限制,出现了一种改进的可编程只读存储器,即EPROM(Erasable Programmable Read-Only Memory)。
EPROM允许在需要时将已编程的存储单元擦除并重新编程。
EPROM芯片上的存储单元由一个浮栅电容器组成,可以通过暴露在紫外线下来擦除它们。
EPROM的擦除和编程都是的通过连接特定的电路完成。
Prim算法详细步骤
Prim算法详细步骤Prim算法是一种用于解决最小生成树问题的贪心算法。
它通过选择边的方式逐步构建最小生成树,从而使得树中所有边的权重之和最小。
本文将详细介绍Prim算法的步骤。
1. 首先,我们需要确定一个起始点作为最小生成树的根节点。
这个起始点可以是图中的任意一个顶点,我们可以根据具体问题的需求来选择。
2. 接下来,我们需要定义一个集合T来存放最小生成树的边。
一开始,集合T是空的。
3. 然后,我们需要定义一个集合V来存放已经加入最小生成树的顶点。
一开始,集合V中只包含起始点。
4. 然后,我们需要找到一条从集合V中的顶点到集合V之外的顶点的边,且该边的权重最小。
我们将这条边称为"最小权重边"。
首先,我们可以将起始点连接到任意一个集合V之外的顶点的边加入集合T,并将该顶点加入集合V。
5. 继续执行步骤4,每次选择一条连接集合V与集合V之外顶点的最小权重边,并将该边加入集合T。
同时,将该边连接的顶点加入集合V。
6. 重复执行步骤5,直到最小生成树中包含了图中的所有顶点。
7. 最后,我们得到的集合T即为最小生成树的边。
通过以上步骤,Prim算法可以找到一个最小生成树。
下面我们通过一个具体的例子来演示Prim算法的过程。
假设我们有一个无向加权图,其中包含了6个顶点和9条边。
我们以A作为起始点开始Prim算法。
初始状态:集合V:{A}集合T:{}步骤4:起始点A连接到B的边为最小权重边,加入集合T,并将B加入集合V。
集合V:{A, B}集合T:{(A, B)}步骤5:集合V中的顶点A连接到D的边为最小权重边,加入集合T,并将D加入集合V。
集合V:{A, B, D}集合T:{(A, B), (A, D)}步骤5:集合V中的顶点D连接到F的边为最小权重边,加入集合T,并将F加入集合V。
集合V:{A, B, D, F}集合T:{(A, B), (A, D), (D, F)}步骤5:集合V中的顶点F连接到G的边为最小权重边,加入集合T,并将G加入集合V。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收集器
12
操作原理
收集器部件
13
操作原理
检测器部件
14
操作原理
法拉第检测器
15
操作原理
附加的电子倍增检测器
16
所以通过控制不同的磁场强度我们就能控制质量数多大的离子通过检测器.
4
操作原理
磁场分析
5
样气转换操作
加热到120oC ±0.1o
6
操作原理
离子源
• 样气通过毛细管,旁路,煅烧的玻璃漏被引入到离子源。
• 离子是由高能的电子冲击产生的,高能电子来自加热的灯丝。 • 这就是所谓的‘Electron Impact Ion Source’ “电子碰撞离子源”。 • 一旦生成离子源就会被高压电源加速到”Source Block”。 • 这个电压被称为 ‘离子能’ 大概是1000伏。
M Br e 2V
2
M = 离子质量 e = 一个电子的电量3Βιβλιοθήκη 2V= 减速的电压
操作原理
实际应用中加速电压‘V’ 和运行偏转半径 ‘r’是一个定值. 所以公式可以 简化为:
M 2 M M 22 B M 2 M B e 2 B B e e e
M = 离子质量 e = 一个电子的带电量 B = 磁场强度
• 其他电压应用到离子源的电极上,这些电压使离子在穿越磁扇前形成一束校准的光 束。
7
源的操作原理
8
操作原理
电磁质量过滤
离开离子源之后离子束到达一个电磁场,电磁场是有附加上的电流产生。 磁场强度由来自电脑的信号控制,信号大小取决于我们要测量哪个离子。 几何分析器以及配件的设计使得某一种离子或者特殊质量数在特定的时间 到达检测器,质量量程达到150AMU (原子质量单位)。 空气中典型的4种组分的质量数如下:
Prima Pro 培训课程
The world leader in serving science
操作原理
操作原理
介绍
质谱仪组成部分
•原理 •离子 •质谱仪 (其他分析仪) •检测部件(收集器)
2
操作原理
Prima/Sentinel Pro 磁扇式质谱仪. 这类设备的操作是通过观察带电粒子在磁场内的运动. 这些离子在磁场中偏转,偏转公式如下:
28
N2 32 O2 40 Ar 44 CO2
9
操作原理
到达分析器的路径
10
操作原理
收集器
• 被校准的离子束被分开成一小束特定质量数部分带电的离子束进入到 收集器。 • 这一部分包括: • 一个聚焦的部分称为: ‘四极透镜’。 • 一个部件被称为:“分解堆栈”,保证了离子有效地分离。 • 检测器单元捕获到离子然后提供一个信号输出到信号放大器,代表着 离子的数量。 • 1个或者2个检测器应用到了我们的设备,位于检测室里。
11
操作原理
Collector • 第一个检测器是 “法拉第盘”. 包括一个简单的金属盘或者桶,可以 收集到达的离子。 • 信号输出直接作用到放大器上,信号强度的大小取决于离子浓度的 大小。. • 第二个检测器‘S.E.M.’ (倍增检测器). 这里每个离子被转换成1个或者多个电子,像雪崩一样产生一个放 大信号到达放大器。 S.E.M 容易被大的离子强度所损害,而且不可修复。一般只是检测 小浓度的气体啊,一般小于100ppm。