阶梯型变幅杆圆弧过渡动力学分析
复杂阶梯形圆筒件拉深有限元分析

摘要阶梯形零件在拉深成形的过程中,毛坯变形区的变形与应力基本与圆筒形件拉深相同。
但是此类零件的复杂性与多样性,决定其拉深次数与工序的安排与圆筒形件拉深相比存在很大的不同点。
并且在拉深的过程中受到许多因素的影响,容易出现拉裂、起皱、减薄、拉深不充分和回弹量过大等问题。
因此,利用有限元分析软件Dynaform 模拟拉深,可以清楚的看到成形过程中存在的缺陷,进而利用数值模拟的结果优化冲压工艺与模具设计的方案,大大的缩短了研发周期。
本文首先分析了该零件的结构特点,探究一次拉深的可行性,根据一次拉深的数值模拟结果,分析危险部位,进而提出改进的方案。
其次根据阶梯形件的拉深规则与零件的结构特点,确定拉深次数,拉深顺序。
根据设计的各工序的凹模造型分别在不同压边力,不同毛坯直径,不同凸缘半径,不同拉深方式,不同工具运动速度等条件下在Dynaform软件里进行拉深模拟,选取成形质量最佳的作为下一工序的毛坯,通过不断地模拟优化最终得到该复杂阶梯形圆筒件的最佳拉深参数。
最后根据数值模拟的各项参数探讨各项拉深成形参数对成形模拟结果的影响。
本文主要通过Dynaform软件对复杂阶梯形圆筒件的拉深方法及各次拉深造型的确定进行研究,探讨数值模拟的各项参数对成形件的成形效果和质量的影响,着重探讨拉深方式对回转体阶梯形件的成形质量和效果的影响,对于多次拉深成形的零件,拉深方式对成形质量的影响极大,有限元模拟分析方法在实际的生产中具有重大的意义。
关键词:阶梯形件;拉深方案;Dynaform软件;虚拟冲压速度Complex stepped cylindrical deep drawing finite element analysisStudent:LIN Zi-mei Teacher:QIN TianAbstract:The deformation and stress of the stepped parts in the process of deep drawing forming are the same as that of the cylindrical parts.. However, the complexity and variety of the parts, the number of deep drawing and the arrangement of the process are different from the cylinder parts.And in the process of drawing by the influence of many factors, prone to crack, wrinkle, reducing thin, drawing and spring back problem. Therefore, using finite element analysis software DYNAFORM to simulate the drawing, can clearly see the forming defects existing in the process, optimization of stamping process and die design scheme and the numerical simulation results, greatly relationship development cycle.This paper first analyzes the structural features of this part, explores the feasibility of a deep drawing, and analyzes the dangerous parts according to the numerical simulation results of a deep drawing, and then puts forward the improving scheme.Secondly, according to the drawing rules of the ladder parts and the structural features of the parts, the number of the deep drawing and the order of drawing are determined.According to the design of the process of Concave die modeling respectively in different blank holder force, different diameter of blank, under the condition of different flange radius, different drawing methods, different velocity and in the DYNAFORM software used in deep drawing simulation, selection of forming quality best as a process of blank, through continuous simulation and optimization is finally obtained the complex stepped cylindrical parts the best drawing parameters.According to the parameters of numerical simulation, the influence of drawing parameters to the forming simulation results is discussed.This paper mainly by DYNAFORM software on complex stepped cylindrical parts drawing method and the drawing shape determine research, discusses the effects of the parameters of the numerical simulation of stamping forming effect and quality, focuses on drawing rotary stepped shape quality and effect, for multiple deep drawing parts drawing method on the forming quality of a great impact, finite element simulation analysis method in the actual production has great significance.Key words:Ladder;Drawing Scheme;Dynaform;Virtual punch velocity目次摘要 (I)Abstract (II)1 引言 (1)1.1课题研究的背景和意义 (1)1.2国内外研究现状 (1)1.3课题研究的主要内容 (2)2 板块冲压成形模拟仿真软件Dynaform应用基础 (3)2.1板块冲压成形模拟仿真软件简介 (3)2.2应用Dynaform软件的一般流程 (3)2.3 Dynaform软件系统结构 (3)2.3.1前处理模块 (4)2.3.2分析模块 (4)2.3.3 后处理模块 (5)2.4本章小结 (5)3复杂阶梯形圆筒件一次拉深成形设计 (6)3.1复杂阶梯形圆筒件拉深工艺分析 (6)3.1.1拉深工艺要求 (6)3.1.2毛坯尺寸估算 (7)3.2 探究一次拉深成形 (8)3.2.1毛坯材料性能参数 (8)3.2.2理论压边力计算 (8)3.2.3模拟拉深及可行性判断 (8)3.3本章小结 (9)4复杂阶梯形圆筒件五次拉深成形设计 (10)4.1五次拉深设计依据 (10)4.2拉深工序造型结构设计 (10)4.3各工序不同参数下数值模拟与比较 (13)4.3.1第一次拉深 (13)4.3.2 第二次拉深 (14)4.3.3 第三次拉深 (15)4.3.4第四次拉深 (16)4.3.5 第五次拉深 (19)4.4本章小结 (20)5 拉深成形过程板料变化情况 (21)5.1成形极限与零件厚度分布 (21)5.2最小厚度变化情况 (22)5.3最大减薄率变化情况 (22)5.4最大主应变变化情况 (23)5.5复杂阶梯形圆筒件拉深成形参数影响探究 (23)5.5.1压边力对成形结果的影响 (23)5.5.2凸模运动速度对成形结果影响 (24)5.5.3拉深方式对成形结果影响 (24)5.5.4模具间隙对成形结果影响 (25)5.6本章小结 (26)6结论 (27)致谢 (28)参考文献 (28)桂林理工大学本科毕业设计·论文1 引言1.1课题研究的背景和意义冲压是指在常温的条件下,运用安装在压力机上的模具对板料施加压力,使得板料发生塑性变形或分离,进而得到所需要的零件的一种压力加工方法。
数控机床螺距误差测量与补偿
2 辩枷除。岬.鑫、
O ■
看.2
群-4 .6 .8 轴线何置,m“ (b)补偿之后的螺距误差
图3补偿前后螺距误差对比图
(下转第53页)
第9期
李勇勇等:超声辅助电火花沉积装备的设计
·53·
可以降低应力集中。在截面突变处加适当的圆弧过 渡,不仅可以降低应力集中,而且可以使实际谐振频 率恢复到计算值,这一过渡圆弧称为最佳过渡圆弧, 其过渡圆弧半径可以从图4中求取。计算过程如下:
对于FANUC系统,设定下列参数: No.3621=0(各轴负方向最远一端的螺距误差 补偿点的号码); No.3622=20(各轴正方向最远一端的螺距误差 补偿点的号码); No.3620=O(各轴参考点的螺距误差补偿点号码); No.3624=30000(补偿点的间隔); No.3623=0(补偿的倍率); No.1851=26(各轴的反向间隙补偿量); 并将增量值的滚珠丝杠螺距误差输入到系统中。 4.2补偿结果分析
关键词:数控机床;螺距误差;反向间隙;激光干涉仪 中图分类号:TC,659 文献标识码:A 文章编号:1001—3881(2009)9—037—2
Thread Pitch Error Measure and Compensation in CNC Machine
CHEN Fang
(Shenzhen Polytechnic Institute,Shenzhen Guangdong 518055,China)
固定反射镜
基准臂
活矧 射镜
I
.
≥.Mil.1
豳
:复二光主L I 7∥ 分光镜
图1干涉镜原理
如图1所示,光源在半银色透镜表面分开,一半 的光呈90。反射至一个固定距离透镜,剩余的一半则 透过一个可移动的透镜。两个透镜互相准直,以使从 透镜反射的还原光束互相平行,并一同向观察者反射 回去。若每一个透镜与半透镜的距离完全相同,则光 束会同步到达观察者处,并发生相长性干涉,使光更 为明亮。若可移透镜放得再远一点,使其位置偏移大
圆锥形及阶梯型变幅杆模态分析资料讲解
圆锥形及阶梯型变幅杆模态分析超声波变幅杆的设计及修正摘要:超声变幅杆是超声波振动系统中一个重要的组成部分。
本文结合超声变幅杆理论对设计变幅杆进行结果分析及参数修正,采用ANSYS 12.1对变幅杆进行了有限元模态分析,在此基础上,设计并加工了一个应用于超声显微切割系统中的、谐振频率为70 kHz的半波长圆锥型变幅杆,和用于超声波近场悬浮的、谐振频率是20kHz的阶梯型变幅杆,并进行了相关实验。
实验结果表明,利用ANSYS软件辅助设计方法得到的超声变幅杆,其谐振频率与模态分析值非常接近,修正理论也可以让变幅杆谐振频率更加接近设计值,为超声变幅杆的设计、校核和优化提供了一种新途径。
关键词:变幅杆;有限元;模态分析Design and Revise of Ultrasonic hornAbstract:Ultrasonic horns apply widely in ultrasonic processing. Combined with ultrasonic horn theory, correct the ultrasonic hornby formula, analysis the modal of horn by ANSYS 12.1, on this basis, design a half-wavelength conical horn which resonant frequency is 60kHz, used by a ultrasonic micro dissection system, and a stepped ultrasonic horn which resonant frequency is 20kHz, used by a near-field acoustic levitation system, then make the related experiment. The results show that the resonant frequency of the ultrasonic horn designed by ANSYS is approaching the theory value, the correction coefficient also can make the resonant frequency approach the theory value, that provides a new way to design, checking or optimization.Key word:Ultrasonic horn; Finite element; Modal analysis引言超声变幅杆是超声振动系统的重要组成部件,它在振动系统中的主要作用是把机械振动的质点位移量或运动速度放大,并将超声能量集中在较小的面积上[1]。
超声变幅杆的设计

本科毕业论文(2015届)题目超声变幅杆及其性能参数测试平台设计学院机械工程学院专业机械设计制造及其自动化班级学号学生姓名指导教师完成日期2015年5月诚信承诺我谨在此承诺:本人所写的毕业论文《超声变幅杆及其性能参数测试平台设计》均系本人独立完成,没有抄袭行为,凡涉及其他作者的观点和材料,均作了注释,若有不实,后果由本人承担。
承诺人(签名):年月日摘要本文从已知的变幅杆大小端直径、工作频率和材料出发,对超声加工系统中的变幅杆进行了研究。
本文主要包括以下研究内容:1.根据已有的变幅杆大小端直径,通过波动方程理论,完成对阶梯型、指数形、圆锥形三种变幅杆的外形设计计算。
2.利用有限元方法,借助有限元软件ANSYS对设计出的三种变幅杆进行动力学分析。
先在SolidWorks中建立三种变幅杆的三维模型,再导入ANSYS中进行模态分析和谐响应分析。
模态分析是指在规定超声波发生器所产生的振动的频率范围内,测定出变幅杆的各个固有频率。
谐响应分析是指确定变幅杆的一个固有频率,并在变幅杆的一个固定断面施加一个正弦规律的振动,再测定变幅杆的自由端的振动变化。
通过比较自由端和固定端的振幅大小变化,求出所设计的变幅杆的振幅放大比。
3.搭建实验测定平台。
搭建了单独测定变幅杆放大系数的实验平台,还搭建了测定超声振动系统性能的实验平台,并对已有的变幅杆加以实验测定。
通过阻抗分析仪、激光位移传感器等得到谐振频率、放大系数的实际测量数据,并判定了已有的超声振动系统的性能。
关键词:超声变幅杆;有限元;模态分析;谐响应分析;实验平台ABSTRACTStarting from the known diameters of both ends of ultrasonic horn, the working frequency and the material, the horn with the ultrasonic processing system were studied. This paper mainly includes the following contents:1.According to the diameters of both ends of ultrasonic, and by the theory of wave equation, complete the size calculation of tapered, exponential and stepped ultrasonic horn.ing the finite element method, complete the dynamics analysis of three horn by the finite element software ANSYS. First, we should set up 3D models of three horn in SolidWorks, and then import 3D models to ANSYS for modal analysis and harmonic response analysis. Modal analysis is in accordance with the ultrasonic generator vibration frequency range and determine each natural frequency of the horn. Harmonic response analysis is in the determined natural frequency of a horn, and the horn of a fixed section applied a sinusoidal vibration, to determine the vibration change of the free end of the horn. By comparing the amplitude change of the free end and the fixed to get the amplification ratio of the designed horn.3.Set up the experimental test platform.The experimental platform of measuring the amplification coefficient of variable amplitude rod is established, and then the experimental platform of measuring the ultrasonic vibration system performance is established, and the existing variable amplitude rod was measured experimentally. The actual measurement data of the resonant frequency and the amplification coefficient are obtained by the impedance analyzer and laser displacement sensor, and the performance of the ultrasonic vibration system is determined.Keywords: ultrasonic horn;finite element;modal analysis;harmonic response analysis;experimental platform目录第一章绪论 (1)1.1 引言 (1)1.2 国内外研究发展历程 (1)第二章超声波加工概述 (4)2.1 超声波的特点 (4)2.2 超声加工的基本原理 (5)2.3超声加工的特点 (7)第三章变幅杆的设计 (8)3.1 变幅杆设计理论 (8)3.1.1 变幅杆设计概述 (8)3.1.2 变截面纵振动的波动方程 (8)3.2 指数形变幅杆的理论计算 (10)3.2.1 指数形变幅杆频率方程和谐振长度 (11)3.2.2 指数形变幅杆的位移节点x (11)M (12)3.2.3 指数形变幅杆的放大系数p3.2.4 指数形变幅杆的计算 (12)3.3 圆锥形变幅杆的理论计算 (12)3.3.1 圆锥形变幅杆的频率方程和谐振长度 (13)3.3.2 圆锥形变幅杆的位移节点x (14)3.3.3 圆锥形变幅杆的放大系数M (14)p3.3.4 圆锥形变幅杆的计算 (14)3.4 阶梯形变幅杆的理论计算 (14)3.4.1 阶梯形变幅杆的位移节点x (15)M (16)3.4.2 阶梯形变幅杆的放大系数p3.4.3 阶梯形变幅杆的计算 (16)第四章运用ANSYS对变幅杆的动力学分析 (17)4.1 有限元方法简介 (17)4.2 有限元方法动力学分析的理论基础 (18)4.2.1 模态分析的力学基础 (18)4.2.2 谐响应分析的力学基础 (19)4.3 变幅杆的动力学分析 (20)4.3.1 变幅杆模型的建立 (21)4.3.2 变幅杆网格的划分 (22)4.3.3 变幅杆的模态分析 (23)4.3.4 变幅杆的谐响应分析 (25)第五章变幅杆性能参数测试实验平台的搭建 (29)5.1 实验目的 (29)5.2 实验设备 (29)5.2.1 压电式加速度传感器 (29)5.2.2 电荷放大器 (31)5.2.3 示波器 (32)5.3 实验测试系统的搭建 (32)第六章超声振动系统实验平台的搭建 (34)6.1 实验简介 (34)6.2 主要实验设备 (34)6.2.1 激光位移传感器 (34)6.2.2 阻抗分析仪 (35)6.3 实验测试系统的建立 (35)6.4 实验测试过程与结果分析 (36)第七章总结与展望 (39)7.1 总结 (39)7.2 展望 (39)致谢 (41)参考文献 (42)第一章绪论1.1 引言超声波加工是一种近十几年来新兴的加工技术,目前已经在很多工业中得到了应用。
阶梯形超声变幅杆的设计分析
D i f e r e n t s h pe a s f o l u f in f g r o d s h a v e t h e i r o w n a d v nt a a g e s nd a d s i a d v nt a ge a s .U s i n g t h e t h e o r e t c i l a d e s i g n f o r mu l a t o
助设计可以在很大程度上可以克服数 学模型的一些 问题 , 并得 到具有参考价值 的结果 , 这就可以做为一种新 的设计和校
核 的方 法 。
关键词 : 超声波; 变幅杆 ; 有限元 中图分 类号 : T H1 6 ; T Q 0 5 1 . 9 + 1 文献标识码 : A 文章编号 : 1 0 0 1 — 3 9 9 7 ( 2 0 1 3 ) 1 2 — 0 0 1 4 — 0 3
( 1 . M e c h a n i c a l E n g i n e e r i n g D e p a r t me n t , T a i y u a n U n i v e r s i t y o f T e c h n o l o g y , S h a n x i T a i y u a n 0 3 0 0 2 4 , C h i n a ; 2 . T a i Y u a n T A I C O A u t o E l e c t r o n C o . , L t d . , S h a n x i T a i y u a n 0 3 0 0 0 6 , C h i n a )
机 械 设 计 与 制 造
l 4
Ma c h i n e r y De s i g n &
Ma n u f a c t u r e
阶梯型变幅器的动力学特性研究
阶梯 型 变 幅器 的动力 学特 性研 究
王 燕 忠 , 吕 明 , 王 时 英
( 原 理 工 大 学 , 山西 太 原 太 00 2 ) 3 0 4
摘 要 : 据 阶梯 型 变幅 杆 位 移 分 布 方 程 和 环 盘 的弯 曲方 程 、 界 条 件 以及 力 耦 合 条 件 , 导 出 了 由 非谐 振 环 盘 根 边 推 和 阶梯 型 变 幅 杆 组 成 的 变 幅 器 的频 率 方 程 , 据 此 设 计 出变 幅器 ;最后 ,由有 限元 软 件 分 析 、阻抗 分 析 仪 分 析 并 以及 实 验验 证 , 证 明这 种 设 计 方 法 与 实 验 结 果 比较 接 近 , 是 一 种 有 效 的 变 幅器 设 计 方 法 。
第 5期 ( 第 1 2 ) 总 6期
21 0 0年 1 0月
机 械 工 程 与 自 动 化 M ECHANI CAL ENGI NEERI NG & AUTOM ATI oN
N o. 5
Oc. t
文章 编 号 : 6 2 6 1 ( 0 0 0 — 0 5 0 1 7 — 4 3 2 1 ) 50 6 — 3
1
( 一 A1 o k ) c s z+ B1 i k sn z 。 … … … … … …
( 1)
小 端 的位 移 ( < 0 <L ) 布为 : 分
f( 一A2ok +B2 n z 。 … … … … … … ( ) 2 ) 为积分 常数 ; 一 / , B( ,) k f c为纵波 在 变 幅杆 中的传播 速度 , 为振 动 圆频率 。
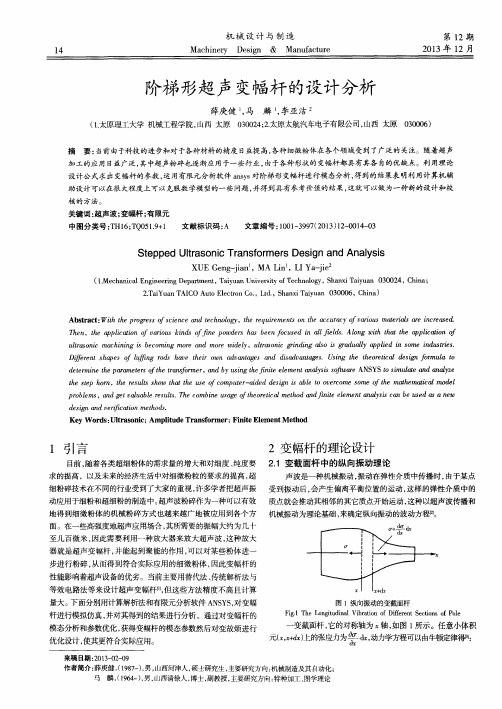
作 弯 曲振动 ,只有 圆节线 。在柱坐 标系 r , 中,齿 , 轮 的厚 度 h为 常 数 ,则 环 盘 的轴 向弯 曲 振 动 位 移 分 布 _( ≤R。为 : 5 R ≤r )
针对有限元的超声波加工中变幅杆的动力学分析及设计
要将两个图元合并成一个图元(MERGE ITEMS)。由于在建模过程中,进行了删除、合并或其它操作,可能在编号中生成许多空号,为保存数据存储空间(删除空号)和保持期望的编号顺序,需要压缩编号,删除编号间的空隙。
4.3.1.2.加载并求解
1.指定分析类型和分析选项
模态分析求解前。指定分析类型为模态分析,设置模态提取方法有Subspace(子空间迭代)法,指定模态提取的频率范围是19~21kHz。待提取的模态个数为5。
2.在模型上加载荷
在模态分析中,难一有效的载荷是零位移约束。如果在某个DOF处指定了一个非零位移约束,程序将以零位移约束替代该DOF处的位移。本文在体模型xz面内的所有的节点上施NDOF为零的一个位移约束。
指数形变幅杆的模型如图4—2所示。轴向截面划分为140个面单元,体模型共有2520个体单元。
(a)面模型(b)体模型
图4-2指数形变幅杆有限元模型
Fig.4-2Finite elemபைடு நூலகம்nt model ofexponential hom
圆锥形变幅杆的模型如图4—3所示。轴向截面划分为203个面单元,体模型共有3654个体单元。
Fig.4-4Finite element model ofcomposite horn
阶梯形变幅杆的模型如图4—5所示,轴向截面划分为252个单元,体模型共有4536个体单元。
太原理工大学硕士研究生学位论文
(a)面模型(b)体模型
固4-5阶梯形变幅杆有限元模型
Fig.4-5Finite element model ofstepped hom
太原理工大学硕士研究生学位论文
(a)面模型(b)体模型
图4-3圆锥形变幅杆有限元模型
轮履式爬楼梯轮椅及轮履切换动力学分析
2023年第47卷第12期Journal of Mechanical Transmission轮履式爬楼梯轮椅及轮履切换动力学分析朱花葛海文(江西理工大学机电工程学院,江西赣州341000)摘要针对目前轮履复合式爬梯轮椅存在轮胎易干涉履带、爬梯时轮椅与顶端平台易发生碰撞等问题,设计了一种以关节型摆臂履带底盘为爬楼梯机构、新型轮履切换方式的轮履式爬楼梯轮椅。
建立其数学模型,分析得出质心坐标、攀爬楼梯质心垂向位移曲线以及在轮履切换4个阶段时,摆臂电动机和电动推杆的动力学变化曲线;采用RecurDyn软件对轮椅的上下楼梯模式和轮履切换模式进行仿真,结果表明,轮椅在上下楼梯过程中平稳、安全,轮履切换4个阶段动力学的理论值与仿真情况相符。
研究为该类爬梯轮椅的机械结构设计以及电动推杆选型、摆臂电动机选型提供了理论依据。
关键词轮履式爬楼梯轮椅上下楼梯轮履切换仿真分析Wheel and Shoe Composite Stair Climbing Wheelchairs and Dynamic Analysisof Wheel Shoe SwitchingZhu Hua Ge Haiwen(School of Mechanical and Electrical Engineering, Jiangxi University of Science and Technology, Ganzhou 341000, China)Abstract In response to the current issues of wheel and shoe composite ladder wheelchairs, such as tire interference with the track, and collision between the wheelchair and the top platform during ladder climbing, a wheel shoe composite stair climbing wheelchair with a swing arm track chassis as the stair climbing mechanism and a new wheel shoe switching scheme is designed. Its mathematical model is established, the centroid coordinates, the vertical displacement curve of the center of mass for climbing stairs are analyzed, and the dynamic change curve of the swing arm motor and electric push rod during the four stages of wheel shoe switching are obtained. The up and down stairs mode and the wheel shoe switching mode of a wheelchair are simulated in RecurDyn software. The simulation results indicate that the wheelchair is smooth and safe during the process of ascending and descending stairs, and the theoretical values of the dynamics of the four stages of wheel shoe switching are consistent with the simulation situation. The research provides a theoretical basis for the mechanical structure design, electric push rod selection, and swing arm motor selection of this type of ladder wheelchairs.Key words Wheel and shoe composite stair climbing wheelchair Going up and down stairs Wheel shoe switching Simulation analysis0 引言在生活中,残疾人和老年人上下楼梯比较困难,这给他们的生活带来了很多限制[1]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
【 摘
要】 阶梯型变幅杆 由于加工简单, 易修正, 放大比大等优点 , 用较广, 应 然而由于大小端过渡
处 的应 力、 位移 分布 比较 复杂 , 而导致谐 振频 率 小于理论 频 率 , 从 一直 制约 着其在 实际生产 中的运 用 。 本 文通过 A ss 限元 分析 软件 对 阶梯 形 变幅杆 大 小端 突 变处添加 不 同的过 渡 圆弧 , ny 有 综合 比较 、 分析
将 () 带人() 可得 : 7式 6式
S tn L + ,a k 0 ,a k 5 tn L
() 7
( 8)
为了进一步研究 阶梯型变幅杆在相同放大 比时 ,大端直径 对频率和应力的影响 , 我们又对大端半径为 2 mm,5 m的阶梯 0 1r a 型变幅杆进行 了有限元分析 , 结合半径 为 2mm, 8 其频率 、 应力分 析结果 的做了, 如图 3 所示 。
小端的位移分布 :
() 2ok+ 2i xO x L ) csxB s k ( < < 2 n _ _ () 6
变幅杆 大端位移为换能器输出最大值 ,小端理论上为输 出 端最大值 , 渡段初步认 为位移和应力是连续的 , 且过 可得边界条 件:
( 。 ( ) ; () ( ) 。0 () ) L -  ̄o - " o; o。 s () z 0
Z ENG n a W ANG h-y n LV n Fa -fn. S i i g. Mi g
( iu n Unv ri f c n lg , iest f n n Tay a ies yo Te h oo y Unv ri o ig& T c n lg , ay a 3 0 4, ia t y Mi e h oo y T iu n0 0 2 Chn )
cm rhni l oaloto rsn t l dryeur oi t n om rfeunyudr ieet i- o pees e l r eoa a e p la nc r s r s rqec ne f rn r v yf s s f n o d t f t s a f e df c— clr r,m l c i i adses ir uinS ua ca pi ao r on t s ds i t ,O∞ t doth etrnio cpoiigte~ a f t na t r tb o o u tebst sina ,rvdn o n a t r h
又 由放 大 比 =
S1
=
・
联立 ( )( )( ) 得 : 5 、6 、7 可 () 9
skl i nL
∞狮 瑚咖咖 伽瑚 啪咖枷抛 掩协
|
| 一 弋
j
| ’、
现有超声波发生器的输 出频率为f2 k z在金属中的传播 =0H ,
速度为 C 5 6 m s则传播波长为 A c= 5 m = 0 /. 1 =/ 2 8 m根据 系统频率匹 f 配原则 , 阶梯杆变 幅杆的固有频率也为 2 k 。由于现有换能器 0 Hz 的直径为 5 r 为 了便于装配 , 6 m, a 阶梯型变幅杆的大端直径初 步
不同 圆弧 下阶 梯型 变幅杆 的共振 频 率 , 大 比和应 力分布状 况 , 而从 中找 出不 同阶梯 形 变幅 杆对 应 放 从 的最佳 过渡 圆弧 , 为阶梯 型 变幅杆 的后 续研 究和具体设 计提 供 了一定的理论依 据 。
关键词 : 阶梯型 ; 幅杆 ; 变 过渡 圆弧 【 src】 adryeut sn asom r,eas ipe rcsi ,ay xn ,n m l Abtat Ld e p laoi tnfr esbcueo m lpoes g e f igad. p ̄一 t r cr fs n s i
Ke o ds La de pe; t a on c Tr nsor e s Tr nsto Ar y W r : d rTy Ulr s i a f m r ; a ii n c
中 图分 类 号 :H1 ; 2 1 2 文 献标识 码 : T 6V 6. 9 A
1 引言
在 超 声 加 1振 动 装 置 中 , 幅杆 是 重 要 的组 成 部 分 , _ 变 主要 用 于 阻抗 配和 放 大换 能 器 的输 出振 幅 。常见 的变 幅杆 有 圆 锥 型 , 指 数型 , 链 型 和阶 梯 型变 幅杆 。 这 四种 变 幅杆 中 , 悬 在 圆锥 型变 幅
横向振动的影响 。
() 2 由于截面出应力集 中的影响 , 阶梯型变幅杆大端直径任
rt a aifr u sqe t eerho l d ry eu rsnct nfr r adte p c c eim ei b s o be u n sac a e p lao i r s m s n ei s c s s l r f d t t a oe hs f d g i
.j
一 . J
" - '
O -R= 5 1
、
—
.- 2 | R= 0 k- 2 R= 8
-
l
—
定为 5 m . () , 6 m根据 8式 小端直 径初 步选为 2m , 0 m 选定 不 同的
.,
一▲
1 —.| 一 I ._
一
£ 和 , 到不 同的 放大 比 , 得 如图 2 示 。 所
图 2中, 曲线 I 代表的是 阶梯形变幅杆 的大小段长度 , 曲线
() a频率对照图
Ⅱ代 表的是不同长度下对应的放 大比,从图 3 图 5我们看 出随 ~
着大段长度的增加 , 小段长度在迅速下降 , 放大比开始也在增加 ;
当 L= z6 . m( 为 波长 的 四分 之 一 ) , 形 变 幅杆 的放 大 l = 45 L m 即 时 阶梯
边 界条 件 , I得 }阶梯 杆 的频 率 方 程 。通 过 改变 阶梯 型 变 幅杆 即_ } 1 _ 丁 :
的大小端长度和大小端的面积比, 通过 A ss 限元分析软件对 ny 有 其输入 , 位移的分析 , 输 及其对大小端过渡 面的应力分析 , 从而
得 出 阶梯 型 变 幅杆 的最 佳设 计 尺 寸 以及 过 渡 面应 力分 布 情 况 。 然
得到不同大小端半径下, 阶梯形变幅杆 的动力学参数 , 如表 1 幅杆大端长度记做 , , 小端长度记做 , 大小端过渡处 出记 析 ,
做标为 0 由此 可得阶梯型变幅杆的为位移分布为 : , 大端的位移分布 :
l
所示。
表 1阶梯型变幅杆不 同放大比下有限元分析
() 5
() lok+ li x- l ≤0 csx B n (L 5 ) sk
( csxB ik ) ok + s x n () 4
由胡克定律 , 微元 所 受 内应 力 为 a E = = E E・ 的 运动 方 程 为 :
, 由此 , 出微 元 得
式 :W 中k
, 圆 数A 为 长伽 ' 统 动 频 k 波 , 波 ;2: 振 圆 一 } = _ 系
曾凡凡 王时英 吕 明
( 太原理 T大学 机 械工程学 院 , 太原 0 0 2 ) 3 0 4
Dy a c alss f a d r p t s n cTr n f r r c Tr n io n misAn y i orL d e Ty e Ula o i a s o me s Ar a st n r i
★来稿 日期 :0 1 l— 6 ★基 金项 目: 2 1- 2 2 国家 自然 基 金 (0 7 1 ) 5 9 5 9
第l 0期
曾凡凡 等 : 阶梯 型 变幅杆 圆弧过渡 动力学分析
21 l
大 L= 45 mm进 行 A S S有 限元 分 NY 率 系统振动频率 ; 常数, A、 不同时为 0 。将阶梯型变 式 不成 立 ) 小 端 长 度均 为 -  ̄6 .
略机械损耗 , 假定振 动过程 中杆的各横截面仍保持为平面 , 并忽
蜂 : ‘ 旦婆 O P t
‘
根据等截面振动理论 , 如图 1 所示。假定细杆是均匀的且忽 式中 :: c、
—纵波在细杆中的传播速度。
由于细杆是有界的, 波在端面上反射 , 形成正向波和反 向波 略因纵 向振动引起的横 向变形 。以杆 的纵轴为 轴 , 设杆的坐标 函数 , 所以式( ) 3 所描述的波动方程 的解为( 忽略时间因子 e : ) 为 的任一截 面处 的位移 f , 为 和 t ( £ ) 的函数 , 变 e  ̄D , 应 = x
nl s ow r.astn aayi s taet nio s f r i
i add it dfrn ut oi t s r r s p e w iC m ai sd e no ieet la nc r f m s t p d- er o p r g f r s a oe e n . n
图 1细 杆一 维 纵 向振 动 图
把 tE= r s E・ =
代入式( ) : 1得
萼 dp x萼 =
由上式化简 , 出等截面细杆的一维纵振方程为 : 得
( 2 )
( 3 )
后 , 次添加不 同圆弧 , 依 减弱大小端过渡处应力集 中对其动力学
参 数 的影 响 。
2阶梯型变 幅杆理论分析
s譬 p 车 : = s
d £
杆 和阶梯型变幅杆加工最为简单。 同时, 当大小端直径为定值时 , 阶梯 型变幅杆的放大 比最大, 最有利于振 幅的放大 , 因此 阶梯型 变幅杆 的理论研究就显得尤 为重要了。通常 , 我们在研究阶梯杆 大小端时 , 分别结合均匀棒的振动理论, 得出各端理论方程。 由 再
ct nta i v t e , w dl sd h w vrs c h i te t s a ddsl e e tnt n i ai nb a a a s胱 ie ue ,o ee , n ete z o h r s n i a m n as— o h gd n g y i s ef se pc i r t nds iuini r r cm l , a be et c di ai ti i .hog ss i l n i ir t , e o pe i hs enrs i e r ly ui a o T ruhAny t e m t o t b o se o xt r t n e t lt n z fn e e e