注塑机如何配置机械手
注塑机下料专用机械手的设计与研究
注塑机下料专用机械手的设计与研究I. 内容简述随着科技的不断发展,注塑机在现代制造业中扮演着越来越重要的角色。
然而传统的注塑机下料方式存在一定的局限性,如效率低、精度差等问题。
为了提高注塑机的下料效率和精度,本文对注塑机下料专用机械手进行了设计与研究。
本研究首先分析了注塑机下料过程中存在的问题,如操作人员劳动强度大、生产效率低、安全隐患等。
针对这些问题,提出了采用注塑机下料专用机械手进行自动化生产的解决方案。
该机械手通过精确的运动控制和定位功能,实现了对注塑机模具内零件的快速、准确抓取和放置,从而提高了生产效率和产品质量。
为了满足不同类型模具的需求,本文设计了一种通用的注塑机下料专用机械手结构。
该结构包括底座、手臂、手指、夹具等部分,具有较高的刚性和稳定性。
同时通过采用先进的传感器技术,实现了对机械手运动轨迹的实时监测和控制,保证了下料过程的稳定性和安全性。
此外本文还对注塑机下料专用机械手的运动学模型进行了建模和仿真分析,验证了机械手性能的有效性。
通过对仿真结果的优化,进一步提高了机械手的性能和实用性。
本文对注塑机下料专用机械手的应用前景进行了展望,认为随着技术的不断进步,该机械手将在注塑机行业发挥更加重要的作用,为实现工业自动化和智能制造提供有力支持。
A. 注塑成型技术的发展和应用现状随着科技的不断进步,注塑成型技术在工业生产中的应用越来越广泛。
注塑成型技术是一种通过将熔融塑料注入模具,经过冷却定型后取出成型品的工艺。
这种工艺具有生产效率高、成本低、产品精度高等优点,因此在汽车、电子、家电、医疗器械等领域得到了广泛的应用。
高精度注塑成型技术的发展。
为了满足产品的高精度要求,注塑成型技术不断进行技术创新,如采用高精度伺服电机驱动系统、精密导轨和测量装置等,以提高产品的尺寸精度和表面质量。
多材料注塑成型技术的研究。
为了满足不同材料的使用需求,研究人员不断探索新的注塑材料和工艺方法,如热塑性弹性体(TPE)、聚酰亚胺(PI)等新型材料的注塑成型技术。
注塑机机械手程序教材课件
长度:2 words
Addr ACT :动作操作码
Addr+1
TPAR :时间参数
(2)无时间参数动作:
格式:ACT
长度:1 words
Addr ACT :动作操作码
(3)微调动作
存储结构如右: 长度:17 words
Addr+2 XL Addr+3 XH Addr+4 XV
:X位置低字 :X位置高字 :X速度
Addr+5 YL :Y位置低字
Addr+6 YH :Y位置高字
Addr+7 YV :Y速度
Addr+8 ZL :Z位置低字
Addr+9 ZH :Z位置高字
Addr+10 ZV :Z速度
Addr+11 UL :U位置低字
Addr+12 UH :U位置高字
Addr+13 UV :U速度
Addr+14 VL :V位置低字
Addr+15 VH :V位置高字
Addr+16 VV :V速度
注塑机机械手程序教材
15
教导程序源程序储存区
动作信息存储
(1)有时间参数动作:
格式:ACT ,TPAR
(7)
❖ 副放水口:副臂放置水口的位置。 (9)
注塑机机械手程序教材
(8)
4
主臂运动顺序
❖ 主待机位→主臂下行→主取产品→ 主臂后行→主臂上行→装箱位置(
不良品位)
教导时主臂的定位顺序
❖ 主取产品→主臂后行,主臂下行→ 主待机位→主臂上行→装箱位置(
不良品位)
(3)
注塑机机械手程序教材
(5)(1)
机械手与注塑机连接点

机械手与注塑机连接点海天:C1=关模、C3=开模、B7=关模完+24V、B21=安全门+24V、B23=循环启动、38A/38B=开模完全力发:146=取出机关模控制、143=顶针退、142=复动开始、141=顶针进、243=安全门、242=关模完、240=开模完台意德:X00=安全门、X03=锁模完、X23=机械手合模、X24=机械手顶针、Y40=关模、Y46=开模、Y54=开模完海太:X000=安全门、X003=锁模完、X403=机械手连锁、X404=机械手顶针、Y030=关模、Y036=开模、Y434=开模完伊之密:X1-01=安全门+24V、X1-13=机械手连锁、X1-14=机械手顶针、X1-15=机械手取出完成、X3-03=锁模、X3-09=开模、X4-24=锁模终止+24V、X4-25=开模终止+24V、X4-26=全自动日本住友:A12/B12=关模、A13/B13=开模、A14/B14=顶针、A15/B15=循环启动、A1/B1=闭模完、A3/B3=全自动、A4/B4=开模完、A5/B5=安全门日本川口:63=顶针、65=循环启动、206=开模、214=关模、258=安全门、297=闭模完、298=全自动、299=开模完、1=0V、3=24V富强鑫双色机:40A/40B=开模完、35A/35B=安全门、34A/34B=关模完、X09=关模、X20=开模、X27=机械手使用、X46/47循环启动日本东洋:0/15=开模完、3/18=安全门、4/19=关模完、4/14=关模、6/16=开模、8/18=循环启动TMC:301=允许合模、302=允许顶进、303=允许顶退、306=机械手不使用、351=安全门、352=全自动、353=合模完、196=开模完、101=安全门、156=合模阀、159=开模阀、176=顶进阀、177=顶退阀SI Sunny 振强:Y120=开模完+26V、Y122=安全门+26V、Y123=全自动、X216=关模锁住、X217=开模锁住、X218=托模锁住、X219=完成信号、注:X216/217反相(有开模完此接点要通),、X219正相(有开模完此接点要断) 台中精机:001/001A=关模、002/002A=开模、012/012A=顶进、013/013A=顶退、032=允许机械手动作+0V、104=安全门、129=允许关模动作+24V申达:B06=关模终、B11=安全门、B22=循环启动、C1=关模、C3=开模、23A/23B=开模完日钢:15/16=安全门、09/10=开模完、05/06=闭模完、17/18=开模、21/22=关模、20/14=循环启动LG:X007=安全门+3、X014=开模、X015=关模、X016=顶针、X017=周期、Y213=开模完+14、Y214=全自动LG:X014=安全门+3、X025=闭模完+3、X030=开模、X040=关模、X042=顶针、X043=循环启动、Y107=全自动+20、Y123=开模完+20、注:20=110V震雄:100=安全门+24V、069=可取出+24V、070=用机械手(不用机械手时,此接点要通)、071=取出中、072=可以顶针、073=取出完成、038=开锁模震雄:00=安全门+401、18=机械手连线、19=成品、20=顶针、21=循环启动、105=开模、108=关模、123=开模完、注:19/21必须通断一次才能做全自动,18在不用机械手时必须常通震雄:00=安全门、32=机械手连线中、33=成品、34=顶针、35=循环启动、67=开锁模、86=开模完德马格:3=闭模+24V、4=顶针+24V、5=开模完+0V、8/9=安全门(如果这个点没用,用23/24代替)震德:OUT2=开模、OUT8 =关模、OUT18 =吹风(开模完)、IN2=安全门、IN12 =机械手连锁(循环启动)、IN13 =可顶针、IN14=取出完成力劲(红星电脑): OUT01 =关模、 OUT03 =开模、 OUT16 =开模完、 IN 11=完全门、 IN 22=循环启动力劲:Y108=关模、Y109 =开模、Y123 =完全门、X120=开模完、X216=允许关模、X=允许顶出、X=取出完成(循环启动)力劲:X09=安全门、X11=关模完、X16=机械手关模锁住、X17=机械手开模锁住、X18=机械手托模锁住、X19=机械手完成信号、Y08=关模、Y09=开模、Y20=开模完、Y22=全自动博创:I02=完全门、I12=可锁模、I13=可顶针、I14=循环启动、Y02=锁模、Y08=开模、Y21=开模完东华:X000=完全门、X023=循环启动、Y000=锁模、Y006=开模、Y014=开模完亿利达:X56=可顶针、X57=循环启动、X40=完全门、Y21=锁模、Y77=开模完。
第机械手与注塑机的连接
第机械手与注塑机的连接1、安装机械手前确认:因为国产和进口注塑机(欧洲除外)都自成一格,没有统一的规范,所以在装机械手前要对注塑机的固定安装与接线进行确认。
1.1.1注塑机与机械手安装确认:要求提供注塑机与机械手固定面的安装孔位及孔位尺寸,便于装机人员在装机前对制作固定机械手的过桥板;需要打孔的须提供注塑机固定板的安装平面尺寸;如注塑机固定板安装面为异型需提供图纸与照片。
1.1.2注塑机与机械手连线确认:要求提供注塑机的电路接线路图,便于装机人员在装机前对注塑机电路有所了解,提前拿出方案,并可查寻注塑机连线记录表,确保装机时快速无误的完成机械手连线。
2、连线时必须注意事项:安装机械手时必须先对注塑机电路的I/O点接线进行核对确认,并且关断注塑机控制电源,方可连线,连线完毕后必须再次确认,连线是否漏接、错接、短路的现象,然后再通电,并且能随时紧急断电。
3、富井注塑机专用机械手与注塑机主要连接信号:1)可开模联锁★★★2)可开模联锁★★★3)可关模联锁★★★4)可关模联锁★★★5)合模阀联锁★★★6)合模阀联锁★★★7)可顶出联锁★★★8)可顶出联锁★★★9)预留★10)预留★11)熔胶信号★★12)熔胶信号★★13)开模完成信号★★14)开模完成信号★★15)安全门关信号★★16)安全门关信号★★4、富井注塑机专用机械手信号分析4.1、注塑机专用机械手输入信号(由注塑机输出,先用万用表量出确实动作信号电压,然后关断注塑机电源,再与接线,并确认无误后在通电)4.1.1开模完信号:此信号为注塑机开模到底时注塑机才可输出,供给注塑机专用机械手之信号,为注塑机专用机械手可下行的开启信号。
当注塑机专用机械手在手动时,如无开模完信号,又强行按下行键,手臂不下行,且手控器显示报警。
在全自动时,如开模完无切换动作,手臂不下行取物。
4.1.2熔胶信号:此信号为注塑机熔胶时注塑机才可输出,供给注塑机专用机械手之信号,为注塑机专用机械手安全信号。
机械手与注塑机连接点
机械手与注塑机连接点海天:C1=关模、C3=开模、B7=关模完+24V、B21=安全门+24V、B23=循环启动、38A/38B=开模完全力发:146=取出机关模控制、143=顶针退、142=复动开始、141=顶针进、243=安全门、242=关模完、240=开模完台意德:X00=安全门、X03=锁模完、X23=机械手合模、X24=机械手顶针、Y40=关模、Y46=开模、Y54=开模完海太:X000=安全门、X003=锁模完、X403=机械手连锁、X404=机械手顶针、Y030=关模、Y036=开模、Y434=开模完伊之密:X1-01=安全门+24V、X1-13=机械手连锁、X1-14=机械手顶针、X1-15=机械手取出完成、X3-03=锁模、X3-09=开模、X4-24=锁模终止+24V、X4-25=开模终止+24V、X4-26=全自动日本住友:A12/B12=关模、A13/B13=开模、A14/B14=顶针、A15/B15=循环启动、A1/B1=闭模完、A3/B3=全自动、A4/B4=开模完、A5/B5=安全门日本川口:63=顶针、65=循环启动、206=开模、214=关模、258=安全门、297=闭模完、298=全自动、299=开模完、1=0V、3=24V富强鑫双色机:40A/40B=开模完、35A/35B=安全门、34A/34B=关模完、X09=关模、X20=开模、X27=机械手使用、X46/47循环启动日本东洋:0/15=开模完、3/18=安全门、4/19=关模完、4/14=关模、6/16=开模、8/18=循环启动TMC:301=允许合模、302=允许顶进、303=允许顶退、306=机械手不使用、351=安全门、352=全自动、353=合模完、196=开模完、101=安全门、156=合模阀、159=开模阀、176=顶进阀、177=顶退阀SI Sunny 振强:Y120=开模完+26V、Y122=安全门+26V、Y123=全自动、X216=关模锁住、X217=开模锁住、X218=托模锁住、X219=完成信号、注:X216/217反相(有开模完此接点要通),、X219正相(有开模完此接点要断) 台中精机:001/001A=关模、002/002A=开模、012/012A=顶进、013/013A=顶退、032=允许机械手动作+0V、104=安全门、129=允许关模动作+24V申达:B06=关模终、B11=安全门、B22=循环启动、C1=关模、C3=开模、23A/23B=开模完日钢:15/16=安全门、09/10=开模完、05/06=闭模完、17/18=开模、21/22=关模、20/14=循环启动LG:X007=安全门+3、X014=开模、X015=关模、X016=顶针、X017=周期、Y213=开模完+14、Y214=全自动LG:X014=安全门+3、X025=闭模完+3、X030=开模、X040=关模、X042=顶针、X043=循环启动、Y107=全自动+20、Y123=开模完+20、注:20=110V震雄:100=安全门+24V、069=可取出+24V、070=用机械手(不用机械手时,此接点要通)、071=取出中、072=可以顶针、073=取出完成、038=开锁模震雄:00=安全门+401、18=机械手连线、19=成品、20=顶针、21=循环启动、105=开模、108=关模、123=开模完、注:19/21必须通断一次才能做全自动,18在不用机械手时必须常通震雄:00=安全门、32=机械手连线中、33=成品、34=顶针、35=循环启动、67=开锁模、86=开模完德马格:3=闭模+24V、4=顶针+24V、5=开模完+0V、8/9=安全门(如果这个点没用,用23/24代替)震德:OUT2=开模、OUT8 =关模、OUT18 =吹风(开模完)、IN2=安全门、IN12 =机械手连锁(循环启动)、IN13 =可顶针、IN14=取出完成力劲(红星电脑): OUT01 =关模、 OUT03 =开模、 OUT16 =开模完、 IN 11=完全门、 IN 22=循环启动力劲:Y108=关模、Y109 =开模、Y123 =完全门、X120=开模完、X216=允许关模、X=允许顶出、X=取出完成(循环启动)力劲:X09=安全门、X11=关模完、X16=机械手关模锁住、X17=机械手开模锁住、X18=机械手托模锁住、X19=机械手完成信号、Y08=关模、Y09=开模、Y20=开模完、Y22=全自动博创:I02=完全门、I12=可锁模、I13=可顶针、I14=循环启动、Y02=锁模、Y08=开模、Y21=开模完东华:X000=完全门、X023=循环启动、Y000=锁模、Y006=开模、Y014=开模完亿利达:X56=可顶针、X57=循环启动、X40=完全门、Y21=锁模、Y77=开模完。
注塑机机械手臂原理
注塑机机械手臂原理
注塑机机械手臂是一种用于注塑机械设备中的自动化装置,它主要用于将注塑机所产生的塑料制品从注塑机模具中取出并进行后续处理。
机械手臂的原理是基于先进的机电一体化技术和控制系统,以实现准确的操作和高效的生产。
机械手臂通常由以下几个部件组成:伺服电机、减速器、联轴器、传感器、控制器以及机械结构。
其中,伺服电机通过电子控制系统来控制手臂的运动,减速器用于减少电机转动速度并提高扭矩输出,联轴器用于连接电机和减速器,传感器用于监测手臂的位置和力度,控制器则负责对手臂进行精确的控制和编程。
在注塑过程中,机械手臂首先接收到注塑机发出的信号,确定取出塑料制品的时间和位置。
然后,伺服电机开始运转,将机械手臂的各个关节按照设定的路径和速度进行运动。
同时,传感器不断监测手臂的位置和力度,并将相关信息传递给控制器进行实时调整。
当机械手臂到达指定位置时,它会使用特殊的夹具将注塑机中的塑料制品夹持住,然后将其取出并放置到指定的位置。
完成取出之后,机械手臂会根据设定的路径返回初始位置,等待下一次操作。
整个过程中,机械手臂的运动是精确、稳定且高效的,大大提高了注塑机械设备的生产效率。
总的来说,注塑机机械手臂通过先进的机电一体化技术和控制系统,实现对塑料制品的自动化取出和处理。
它具有高度可靠
性、高速度和高精度的特点,为注塑行业的发展提供了强有力的支持。
注塑机如何配置机械手
大型横走机配置和用途:1.大型横走械手系列适用于350~4000顿的各型卧式射出成型机的成品及水口取出.2.手臂形式有单截式和双截式;上下行程从1200~3000mm.可增加副臂用于三片模,同时夹成品与水口.3.横行轴标准为变频马达驱动(也可根据实际需要来选购AC伺服马达驱动).4.上下,引拔为气缸驱动,节省成本.成品臂上下轴可根据需要选购AC伺服马达驱动,增加模的取出效率.5.安装机械手可以提高产能(20~30%),降低产品的不良率和精准的控制生产量.6.可保障操作人员的安全性,减少浪费.机体结构:1.横行轴标准采用变频马达驱动,也可以选购AC伺服马达驱动,定位精度可达±0.1mm.2.上下及引拔轴标准使用气缸驱动,正臂上下可选购AC伺服马达驱动,横行\引拔\上下均使用精密直线高刚性线性滑轨,耐磨耗寿命长.3.上下手臂使用质量轻高刚性的铝合金挤型结构梁,可达到取出速度快,震动小,高效能及使用寿命长的要求.模组化设计大量生产,零件互换性强.侧姿倒角机构可配合公模或母模取出,固定倒角90°.双截式手臂采用高刚性线性滑轨及铝合金结构梁,特殊设计的皮带倍速机构,大幅度的缩短上下手臂的结构高度,上下气缸只需一半的行程即可达到全行程.除了可以增加上下行的速度及稳定性,并且可配合厂房高度低的场所.选购功能:1.引拔电动调整:引拔位置,行程电动遥控调整,节省调整时间增加操作的安全性.2.上下电动调整行程:上下行程电动遥控调整,即可节省调整时间又可增加操作的安全性.3.横行轴数位控制:数位设定横行行程,可多点及循环置放成品,最多可放99点,用于排列成品.4.横行伺服马达驱动:横行轴可选用AC伺服马达驱动,并采用精密级行星减速机以皮带传动,速度快定位精准;定位精度达±0.1mm,可应用于需定位精准之取出.5.喷离型剂组:可以设定几模喷/每次喷多久/喷头可以装在手臂或模具上,最多可以设定两组.6.中板检测:应用于三板模时确认中板位置,避免副臂撞到模具.7.成品光电检测:放置成品于输送带上防止成品互撞.8.空压剪装置:可以安装于手臂上或横行端剪料头.9.模外置物慢速下行:可以避免撞伤操作人员.备注:此系列机型横行轴数位控制,横行伺服马达驱动,上下轴伺服马达驱动三种选购功能只能三选一.机体结构中型横走机械手:配置和用途:1. 中型横走机械手系列适用于80-600T的各型卧式射出成型机的成品及水口取出。
机械手操作规程
修订记录目的为了让技术人员了解机器,正确的操作,确保操作安全和产品的品质范围适用本部门技术员责任人技术员一、机械手的操作1 先接好气管,让机械手气压表的气压在4kg-8kg之间。
2 打开机械手电源开关,并在注塑机控制板上打开机械手功能键。
3 注塑机开模完成后,先手动放下机械手臂,并调节好手臂下降的位置。
在调试机械手的各行程位置时,首先模开到足够宽的位置,再把机械手气缸里的气放掉,用手慢慢地托下主臂,再逐一进行调试,以免机械手下降时损坏模具及治具4 按“手动”键,即可进入手动操作画面,依所须动作,先按“选择”键,再按“动作”键,依次调节好各动作的延时时间,检查安全报警装置,机械手取出异常时能否发生报警,开机之前必须调好检测,以免压模。
5 按产品的要求设定或选择所需要的程式合理进行取物,然后在注塑机自动状态下,按“全自动”键即可进入自动生产。
6 如要修改动作程式:按“停止”键和“修改”键,进入程式修改画面。
7 技术人员可依据不同的模具,输入动作程式“0-99”,确定后按“输入”键确认,再按“停止”键,然后按“全自动”键进入自动生产。
8 其它设定参照设备使用说明书。
二、安全注意事项1气压表的气压一定要在4kg-8kg之间。
2机械手臂下降后,不能作回旋动作。
使取出臂下降到模具内进行手动运转时,要充分注意不要使取出臂接触到模具,而且,取出臂的操作要在安全范围以外的地方操作.3 注塑机开模未完成,机械手臂不能作下降动作。
4 可打开注塑机安全门关警报,处理完警报,关上安全门即可自动生产。
5.在不使用机械手时,必须把机械手臂置于安全位置,以防机器震动时手臂落下而损坏..6. 机械手运转中,人不可站在机械手落下或作动的范围内,也不可把手或其它的物体伸入机械手作动的安全范围内.。
机械手 机械手与注塑机的连接

第四章富井注塑机专用机械手与注塑机的连接1、装机前确认:在装机前,要求业务人员把安装注塑机的电控线路图复印带回,便于装机人员在装机前对注塑机电路有所了解,提前拿出方案,并可查寻注塑机连线记录表,确保装机时快速无误的完成电控连线。
2、电控连线:因为国产和进口注塑机都自成一格,没有统一的规范,所以在连线时必须查找连接。
3、富井注塑机专用机械手与注塑机主要连接信号:1)可开模联锁★★★2)可开模联锁★★★3)可关模联锁★★★4)可关模联锁★★★5)合模阀联锁★★★6)合模阀联锁★★★7)可顶出联锁★★★8)可顶出联锁★★★9)预留★10)预留★11)熔胶信号★★12)熔胶信号★★13)开模完成信号★★14)开模完成信号★★15)安全门关信号★★16)安全门关信号★★4、富井注塑机专用机械手信号分析4.1、注塑机专用机械手输入信号(由注塑机输出,先用万用表量出确实动作信号电压,然后关断注塑机电源,再与接线,并确认无误后在通电)4.1.1 开模完信号:此信号为注塑机开模到底时注塑机才可输出,供给注塑机专用机械手之信号,为注塑机专用机械手可下行的开启信号。
当注塑机专用机械手在手动时,如无开模完信号,又强行按下行键,手臂不下行,且手控器显示报警。
在全自动时,如开模完无切换动作,手臂不下行取物。
4.1.2 熔胶信号:此信号为注塑机熔胶时注塑机才可输出,供给注塑机专用机械手之信号,为注塑机专用机械手安全信号。
当注塑机专用机械手在全自动时,如关模完无切换动作,手臂不下行取物。
4.1.3 安全门信号:此信号为注塑机安全门关时注塑机才可输出供给之信号,为注塑机专用机械手安全配合信号和报警后启动信号。
当注塑机专用机械手在手动时,如无安全门信号,又强行按动作键,注塑机专用机械手不动作,且手控器产生报警显示。
在全自动时,如开安全门即无安全门信号时,注塑机专用机械手动作暂停,当关安全门即有安全门信号时,注塑机专用机械手继续动作。
注塑机取模机械手控制系统 (2)
摘要机械手是模仿着人手的部分动作,按给定程序、轨迹和要求实现自动抓取、搬运或操作的自动机械装置。
在工业生产中应用的机械手被称为“工业机械手”。
单旋臂式注塑机取模机械手是一种抓取注塑工件的机械手,该机械手占用空间小,稳定性好、效率高,是注塑行业抓取注塑工件不可缺少的自动化设备,该机械手以气动方驱动,简单可靠,操作、维修方便。
有较好的市场应用前景。
本文主要介绍基于单片机的单旋臂式取模机械手的控制板的设计,采用直接控制结构,完成了硬件电路设计,包括时钟复位电路、输入输出通道、液晶接口、键盘接口、串口下载等,包括菜单、机械手动作位置监督、故障报警等相关功能。
整个控制系统结构简洁、各模块功能明确。
机械手采用的不同硬件结构,针对目前开发的单悬臂式注塑机取模机械手控制板提出了相应解决方案。
该控制板采用模块化的电路设计各部分功能明确。
同时,考虑到注塑机取模机械手恶劣的工作环境,在硬件上加入了抗干扰设计,有效提高系统的抗干扰能力。
在软件方面,不但满足了机械手的动作要求,也加入了抗干扰设计,弥补硬件抗干扰的不足。
整个控制系统调试完成,基本完成机械手的各功能要求。
关键词:单片机;注塑机取模机械手;模块化;抗干扰AbstractThe take-out robot for Plastie injection15 arobot for grabat work Pieceof Plasti cinjection .The robot take uPthesmallsPaee,goodStability,highefficieney,it 15 ind ispensable automation equipments inplastie injection fleld.The robot drive with thea ir pressure,simple andere dibility would beser vieeeon venienee. Directeontrolstrueture15usedintheeontrolsystem,asatake一outrobotforPlastieinjection,hardwaredesignincludetheinPut,outPut,LCDdisPlay,keyboard,ISP,soflwaredesig nineludealarm,malfunetionreasondisPlay,teaeh,ete.Thestrueture15eoneision.Thefunc tionofeachmold15exPlieit. AfterinirodueethePresenteonditionandexistentProblemoftake一outrobotfor Plastieinjeetion,thearticleillustrateddifferenthardwarestructureandProPosedthe waytosolVeProblem. ThehardwarePartoftheeontrolsystemchoosesdireeteontrolstrueture,meanwhile;thePlanforconsideranti一inierferencedesignareusedforcancelingthe badenvironmentoftherobotworking.Also,Providefriendlyinierfaeeforshortenthetimeofstudyabouttherobotand softwareanii一interfereneedesignformakeuPthewea比essofthePartofhardware design.ComPletethesystemadjustsandRealizationfunetionoftherobot.KeyWords:MCU:take-out robot for Plastieinjeetion;anti-inierfereneee目录第一章绪论1.1注塑机取模机械手的发展历程与现状1.2课题的来源及任务1.2.1课题的来源1.2.2课题完成的任务1.3课题的意义第二章注塑机取模机械手控制板的总体设计2.1控制板的总体方案2.1.1机械手控制板典型方案2.1.2常用核心处理器2.1.3本控制板采用的方案及选用的核心处理器2.2控制板功能及基本解决方案2.2.1控制板功能要求2.2.2控制板基本解决方案2.3 系统的组成框图第三章注塑机取模机械手控制系统的硬件设计3.1引言3.2硬件模块设计................3.3CPU、ISP、急停、输入、输出通道模块及其电路设计3.3.1 CPU选用及其性能介绍3.3.2 ISP及其电路设计3.3.3 急停电路设计3.3.4输入通道及其电路设计3.3.5 输出通道及其电路设计3.4 键盘端口和状态灯及其电路设计3.4.1键盘、状态灯及其电路设计3.4.2键盘接口及其电路设计3.5液晶显示端口及其电路设计第四章注塑机取模机械手控制系统的软件设计4.1引言4.2软件总体设计4.2.1功能性设计4.2.2可靠性设计4.2.3运行管理设计4.3机械手控制系统的软件模块设计和开发平台、编程语言4.3.1软件模块设计4.3.2开发平台和开发语言4.4机械手急停程序设计4.5机械手动作程序设计4.6键盘扫描和键盘读取模块4.6液晶显示模块第五章注塑机取模机械手控制系统的软、硬件抗干扰设计5.1引言5.2挑选合适的元器件5.2.1元器件的失效机理5.2.2元器件的选择5.2.3降额设计5.3抗干扰措施5.3.1光电隔离5.3.2去祸电容、旁路电容、磁珠5.3.3地线安排5.3.4看门狗技术第六章总结致谢参考文献附录第一章绪论本章简要介绍了国内外注塑用机械手的发展历程和未来的发展方向在深入分析目前国内对于注塑机用机械手技术现状和市场需求之间的关系和矛盾的基础上介绍了本课题的来源并描述了本课题的意义和及所要完成的具体工作。
注塑机机械手使用方法
注塑机机械手使用方法注塑机机械手是一种用于注塑机操作和自动化生产的设备。
它具有精确的定位控制,高效的作业速度和稳定的运行性能,被广泛应用于制造业的各个领域。
下面将详细介绍注塑机机械手的使用方法。
一、安装调试1. 检查注塑机机械手的外观和内部结构,确认设备完好无损。
2. 将机械手安装在注塑机旁边的工作台上,确保机械手与注塑机之间有足够的操作空间。
3. 将机械手的电源线和控制线连接到对应的电源和控制系统上。
4. 根据注塑机的参数设置,对机械手进行调试和校准,确保它能够准确地抓取注塑件并进行操作。
二、操作流程1. 开机准备a. 打开注塑机和机械手的电源开关。
b. 启动注塑机和机械手的控制系统,并进行初始化。
c. 清理注塑机的工作台和周围环境,确保工作环境整洁。
2. 参数设置a. 根据注塑件的尺寸、重量和工艺要求,设置机械手的抓取和操作参数,包括抓取点坐标、速度、力度等。
b. 根据生产任务的要求,设置机械手的作业模式,如单循环操作、连续运行、自动换模等。
3. 作业操作a. 手动操作:通过控制面板或操作手柄控制机械手进行手动操作,包括移动、抓取、放置等。
进行手动操作时,需要操作员具备相关技术和经验,确保操作安全和准确。
b. 自动化操作:通过预设程序和触发信号,实现机械手的自动化操作。
操作员只需设置好注塑机和机械手的参数,启动自动操作模式,机械手将按照预设程序进行操作,减少人工干预和提高生产效率。
4. 监控和调试a. 在操作过程中,及时监测机械手的运行状态和作业效果,如抓取力度、抓取准确度等。
如有异常或问题,及时进行调整和修复。
b. 定期对机械手进行保养和维护,清洁抓取爪、油润滑系统、检查电气部件的连接情况等,确保设备的正常运行和延长使用寿命。
5. 安全操作a. 在操作注塑机机械手时,操作员应严格按照操作规程进行操作,遵守安全生产规范。
b. 在进行机械手操作前,确保注塑机停止工作,避免误操作引起事故。
6. 故障排除a. 如果机械手出现故障或异常,及时停机排除故障,避免对生产环节造成影响。
【一定要收藏】注塑机械手操作指南!
【一定要收藏】注塑机械手操作指南!
一、准备工作
确认电源及空压源等动力源都妥善接好,检查机械手空气调压阀压力至0.4mpa-0.6mpa
二、开机启动
打开机械手电源开关,进行机械手原点复归动作。
设定机械手的各动作模式,具体根据产品需求设置。
三、设定参数
根据机械手夹具上的标参数,输入机械手待机位置和夹取位置。
然后根据标贴上参数设定注塑机开模行程。
四、机器检查
检验夹具螺钉是否有松动,抱夹夹片是否有损坏,气缸伸缩是否正常,是否漏气,吸盘是否完好,金具是否有卡死等不良现象。
五、安装调试
夹具安装OK后,观察夹具所有金具是否在同一个垂直面上,若不在,则调整连接快上的阻挡螺钉使夹具处于同一垂直面上。
半自动微
调夹取位置,调整OK后,保存参数。
然后依次设定机械手的姿势位置,途中开放位置,产品开放位置等。
六、初步设定
进入机械手定时器模块,对各个动作时间进行初步设置。
并初步设定注塑机顶针顶出延时(2s)与后退延时(5s)。
进行注塑机及机械手的全自动运行操作
七、运行观察
请仔细观察全自动状态下两个设备的运行情况,然后微调机械手的各项时间与注塑机的各项时间(顶针顶出延时、顶针后退延时、中间循环时间等),以便机械手做到最迅速稳定的动作反应。
调整完毕,进行全自动生产。
观察20模或半小时以上且无故障报警后方可离开。
注塑机与机械手接口
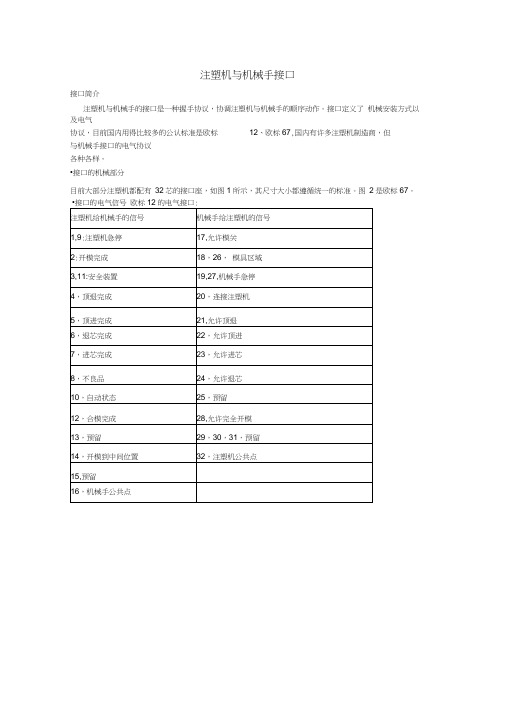
注塑机与机械手接口接口简介注塑机与机械手的接口是一种握手协议,协调注塑机与机械手的顺序动作。
接口定义了机械安装方式以及电气协议,目前国内用得比较多的公认标准是欧标12、欧标67,国内有许多注塑机制造商,但与机械手接口的电气协议各种各样。
•接口的机械部分目前大部分注塑机都配有32芯的接口座,如图1所示,其尺寸大小都遵循统一的标准。
图2是欧标67。
欧下:国内许多注塑机厂商的机械手接口信号一般只有几个信号,以下所示: 注塑机给机械手信号:急停、安全门、开模完成、自动状态。
机械手给注塑机信号:互锁、允许顶出、取出完成。
F面针对欧标12、欧标67的信号做说明:先说电源,注塑机与机械手的信号是通过中间继电器传递的,它们的电源各自独立,这有助于提高各自的稳定性。
信号是高电平有效还是低电平有效,欧标没规定,由注塑机和机械手制造商自己定义,欧标只定义中间继电器的通断。
举个例子,如果某注塑机制造商需要定义允许模关”为低电平有效,那么给32芯注塑机电源” 0V的电源,当机械手允许模关的时候,就闭合相应的中间继电器,就把17芯的信号拉至低电平。
同理如果需要高电平有效就把注塑机的24VDC引到第32芯上。
关于急停信号以及安全装置信号,欧标67比欧标12分别多了一个信号,按照欧标机械手的工作区域需要围起来,以便安全,所以围栏上面需要安装一急停以及检查安全装置是否安全的电气开关。
模具区域”信号,机械手上有两个光电开关,用来监测机械手位置是否在模具区域,若在模具区域,注塑机应该被禁止合模,这个信号与其它信号有点不一样,当不在模具区域的时候,机械手控制中间继电器闭合,如果注塑机定义高电平有效,那么对应的信号线就为高电平,当机械手进入模具区域,中间继电器断开,信号线变为低电平了。
连接注塑机”信号,当需要使用机械手的时候,使能这个信号,那么注塑机就和机械手联锁动作,注塑机的开合模顶针以及抽芯动作受机械手控制,当关闭此信号,机械手和注塑机各自自由动作。
注塑机机械手臂方案
注塑机机械手臂方案引言在注塑机生产过程中,机械手臂是一种常用的辅助设备,用于自动化地完成产品的取出、分拣、堆叠等工作。
机械手臂的选择对注塑机的生产效率和产品质量有着重要的影响。
本文将介绍一种注塑机机械手臂方案,包括设计原理、系统架构和关键技术。
设计原理注塑机机械手臂的设计原理是基于物理学中的力学原理和运动学原理。
通过电机、齿轮、连杆等机械结构实现机械手臂的运动,通过传感器实时感知工作环境,通过控制算法实现机械手臂的精确控制。
系统架构注塑机机械手臂的系统架构主要包括四个部分:机械结构、传感器、控制算法和通信模块。
机械结构机械结构是机械手臂的骨架,包括电机、齿轮、连杆等部件。
机械结构的设计应考虑机械手臂的运动范围、承重能力和稳定性等因素。
常见的机械结构设计有直线型、平行型和关节型等,可根据具体应用场景选择合适的结构设计。
传感器传感器用于感知工作环境和机械手臂的状态。
常见的传感器包括位置传感器、力传感器、视觉传感器等。
位置传感器用于测量机械手臂的位置和姿态,力传感器用于测量机械手臂施加的力和承受的负载,视觉传感器用于识别和定位产品。
控制算法控制算法用于实现机械手臂的运动控制。
常见的控制算法有PID控制算法、路径规划算法和碰撞检测算法等。
PID控制算法通过调节控制参数,使机械手臂达到给定的位置和姿态。
路径规划算法通过规划合理的轨迹,使机械手臂快速且安全地完成任务。
碰撞检测算法通过实时监测工作环境,避免机械手臂与其他物体发生碰撞。
通信模块通信模块用于机械手臂与注塑机控制系统之间的数据交互。
通过通信模块,可以实现机械手臂的远程控制和监控。
常见的通信方式有有线通信和无线通信,可根据实际需求选择合适的通信方式。
关键技术注塑机机械手臂方案中的关键技术主要包括运动控制技术、视觉识别技术和力控制技术。
运动控制技术运动控制技术是实现机械手臂精确控制的关键。
通过合理设计控制算法和调节控制参数,可以实现机械手臂在给定时间内达到目标位置和姿态,并具有较高的运动精度和稳定性。
艾尔发注塑机机械手说明书
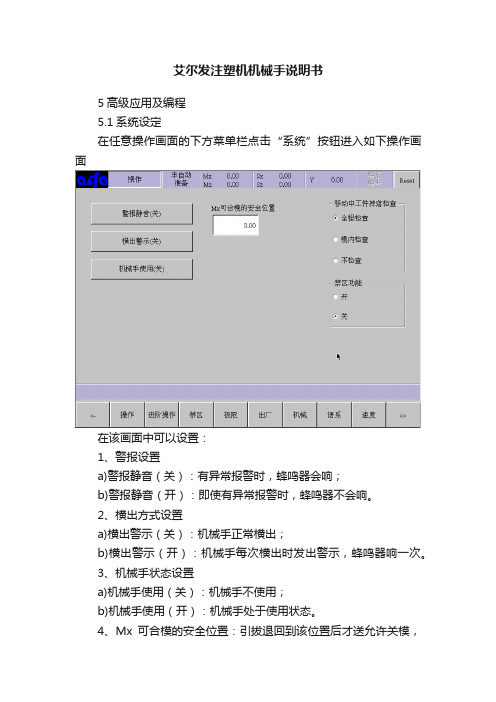
艾尔发注塑机机械手说明书5高级应用及编程5.1系统设定在任意操作画面的下方菜单栏点击“系统”按钮进入如下操作画面在该画面中可以设置:1、警报设置a)警报静音(关):有异常报警时,蜂鸣器会响;b)警报静音(开):即使有异常报警时,蜂鸣器不会响。
2、横出方式设置a)横出警示(关):机械手正常横出;b)横出警示(开):机械手每次横出时发出警示,蜂鸣器响一次。
3、机械手状态设置a)机械手使用(关):机械手不使用;b)机械手使用(开):机械手处于使用状态。
4、Mx可合模的安全位置:引拔退回到该位置后才送允许关模,此功能是为防止类似有送模机的机台,关模时撞到机械手臂而设计的。
5、检知方式设定a)全程检知:机械手从开始取产品一直到产品放掉整个过程中都检测产品是否脱落,如果脱落则警报,机械手暂停。
b)模内检知:机械手只在从开始取物到其横出过安全门这段过程中对产品进行检测,如果产品脱落则警报;在安全门之外,不对产品进行检测。
c)不检知:机械手不检查是否取到产品。
6、禁区功能设置a)开:禁区中设置的参数有效,机械手运行必须在禁区参数设定范围内,否则警报。
b)关:禁区中设置的参数无效,其设置不影响机械手运行。
点击屏幕下方菜单栏中的按键“进阶操作”,进入下面页面1)全自动下可修改的距离范围机械手全自动运行时,能修改轴位置最大距离。
超过时给出提示。
2)机械手本体的IO延迟时间:侧姿,回正信号在O点动作过设定时间后没检到I点发警报。
3)横出轴的原点反相:若选中该项,则机械手归原点时Y轴会往Y+方向找原点。
4)使用模内下行待机功能:若选中该项,则需设置待机点坐标,每次循环都会先回到待机点位置。
5)安全门打开的处理方式a)安全门打开后立即停止:全自动运行时安全门打开后立即停止,后续不在执行,要重新启动运行。
b)安全门关闭后继续加工:全自动运行时安全门打开立即暂停,关门后机械手继续执行后面动作。
6)副臂使用方式:当勾选时,机械手具有相应机型的功能5轴副臂使用伺服;3轴副臂不使用;3轴副臂加汽缸。
注塑机机械手装机配电手册
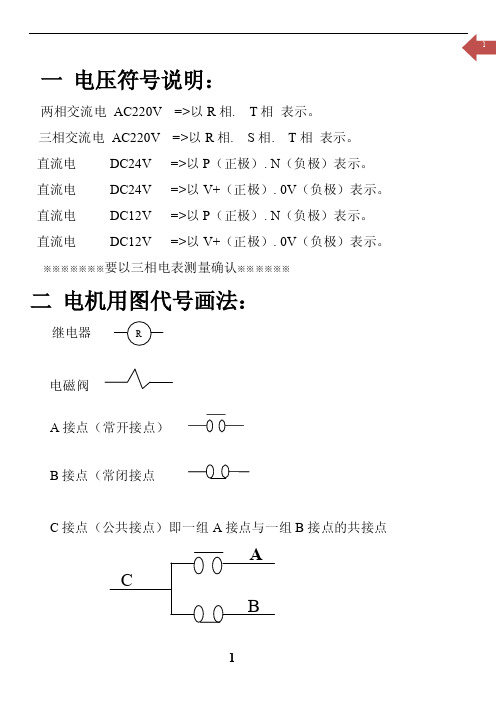
一 电压符号说明: 两相交流电 AC220V =>以R 相. T 相 表示。
三相交流电 AC220V =>以R 相. S 相. T 相 表示。
直流电 DC24V =>以P (正极). N (负极)表示。
直流电 DC24V =>以V+(正极). 0V (负极)表示。
直流电 DC12V =>以P (正极). N (负极)表示。
直流电 DC12V =>以V+(正极). 0V (负极)表示。
※※※※※※※要以三相电表测量确认※※※※※※二 电机用图代号画法: 继电器电磁阀A 接点(常开接点)B 接点(常闭接点C 接点(公共接点)即一组A 接点与一组B 接点的共接点三 造裕机械手信号接线定义:开模安全 12此接点为一“常开接点A(接点)”, 即机械手下降至模内时, 此接点为断路射出机不能开模.关模安全 34此接点为一“常开接点A(接点)”, 即机械手下降至模内时, 此接点为断路射出机不能关模.突模延迟 67此接点为一“常开接点A(接点)”, 即自动时机械手顶针延时时间到, 此接点为短路射出机才能顶出.关模启动 8 9此接点为一“常开接点A(接点)” 且为一瞬间接点, 即自动时机械手下降取物上升后, 此接点为短路直到开模完信号断路, 此接点即断路.开模完成信号11此接点为射出机已开模完成停止信号, 机械手可下降的信号, 需是一组电源输入至机械手, 此信号可为DC12V ,DC24V ,AC220V , 只需更换机械手机身继电器板 RY1 继电器.安全门信号 13此接点为射出机安全门已关上信号, 需是一组电源输入至机械手, 此信号可为DC12V ,DC24V ,AC220V , 只需更换机械手机身继电器板 RY0 继电器.电源 AC220V 14号 15号 电线四机械手信号接线方法:1 开模完成信号:⑴旧型继电器回路射出机。
如开模完成信号开关,没有单独输出则采用下列接法需加一个继电器。
注塑机机械手
注塑机机械手注塑机械干是为注塑生产自功化专门配缶的机械,它可以在减轻繁重的体力劳功、改善劳功条件和安全生产;能醉模仿人体上驶的部分功能,可以对其迸行自功控制使其按照稲定要求揄送制品或搀持工具进行生产操作的自勒化生产设缶。
提高注塑成型机的生产效率、轮定产曲质量、降低庚品率、降低生产成本、增强企业的竞争力等方面起到及其重要的作用。
一、注掘机械手分类在注据工业中遣用的机械手按其智能程度可以分为以下两种类型:1、荃本型注塑机械手:该类型机械手一纓包括固定模式程序和按生产工艺需求的教导模式程序。
固定模式程序涵盖了目前注塑生产的几种标准工艺,利用工业控制器来做简单、规则和重复的功作。
数导模式程序是待意为生产工艺特殊的注塑机适用,通过把基本功作的有序曲安全的编揶迂到成功取物的目的。
2、智能型注塑机械手:该类型机械干一般包括条点记忆置放、任意点待机、较多自由度等功能,一般采用伺服犯幼,能弊进行是大限度的仿人执行比较复杂的操作,还可以通过配方先进的传感器,让其具有视觉、触觉和热觉功能,使其成为具有很高智能。
二、日本注塑机机械手发展趋势:由于注塑机专用机械手能够大堰度的提高主产率和降低生产成本,机械手能解稳定和提高注塑产品的质•重,机械手避免E1人为的操作失误耐适成的损失。
因此,注塑机械干在注塑生产中的作用变得越来越重要。
目前国内的机械手类型比较简单,且大都用于取件。
随着注塑成型工业的发展,以后将有越来越冬的机械干用干上料、混台、自功装卸模具、回收废料等各个工序上,丽且将朝着誉能化方向发展。
三、市场注胶机械手的品牌德国:肖根福罗1§(Schcugcnpflug)x RAMPF. Sondcrhoff等美国:EFD.飞士能、Asymtck. CAMALOT 等亚洲:韩国MAR()、特型言勒化、世椿.武藏MUSASH】.IEk ULE.竽中国:深圳世椿.厦门特亜自幼化、昆山沃椿、深圳奥松、广州大创等尊四・注塑机如何配置机械手大型横走机配査和用途:1•大型横走械手系列适用于35(44000顿的各型卧式射出成型机的成:品及水口取出.2.干譬形式有单截式和双藍式;上下行程从12fX>3(X)0mm.可增加副詳用于三片模,同时夹成品与水口.3•横行轴栋准为变频马达驱功(也可恨据实际需要来选呃ACffl服马达驱动).4.上下,引抜为气缸驱功,节省成本成品譬上下轴可根据需要选啕AC伺眼马达犯幼,增加模内的取出效率.5•安装机械干可以提高产能(2030%),低产品的不良率和精准的控制生产重.6•可保障操作人员的安全性,减少很W-机体结构:1•横行轴栋准采用变频马达驱勒,也可以选列AC何服马达驱勒,定位精度可达士0.1mm.2上下及引妆轴标准使用气缸驱勒,正譬上下可选嗚AC伺服马达驱瓠横行\引拔\上下均使用情密宜线高刚性线性滑轨耐磨耗寿命长.3上下干甯使用质建轻髙刚性的铝台金挤型结构梁,可达到取出速度快用勒小,高效能及使用寿命长的要求•模组化设计大重主产,零件豆换性渴.側姿倒角机构可配合公模或母模取出,固定倒甬90, •双截式手骨采用高刚性线性滑轨及铠台金结构梁,特硃设计的皮带倍速机构,大幅度的缩短上下手譬的结构高度上下气缸只需一半的行程即可达到全行程•除了可以增加上下行的速度尺稳定性,并且可配含厂房高度低的场所.选购功能:1•引抜电功调整:引抜位置,行程电勒遥控调整,节省调整时间喈加操作的安全性•2.上下电幼调整行程:上下行程电勒遥控调整,即可节省调整时间又可渭加探作的安全性.3•横行轴数位控制澈位设定横行行程,可条点斥循环置放成曲,最条可放99点,用干排列成尽4•横行伺服马达呃功:横行械可选用AC伺服马达驱勒,并采用壻密茨行星减速机以皮带传瓠速度快定位错准;定位楕度达土0.1mm,可应用于需定住楕准之取出.5.喷吏型剂组河以设定几模喷/琴次喷各久/喷头可以装在手譬或模具上晨冬可以设定两组.6.中板检測:应用于三板模时确认中板住置,避免副臂撞到模具.7•成品光电筮测:放置成品于输送带上防止成品M理.&空压剪装置:可以安装于手譬上或横行端剪料头.9•模外置物慢速下行:可以避免?1伤操作人员.E注:此系列机型慣行轴数位控制,横行伺服马达呃幼上下轴何服马达驱功三种选购功能只能三选一.机体结构中型横走机械手:配网用途:1.中型横走机械干系列适用于妙600T的各型卧式射出成型机的成品及水口取出。
注塑机机械手臂方案
注塑机机械手臂方案引言注塑机机械手臂被广泛应用于注塑加工行业,可以用于自动化地完成注塑机的操作。
本文将介绍注塑机机械手臂的基本原理、主要组成部分以及应用案例,旨在帮助读者更好地了解和使用注塑机机械手臂。
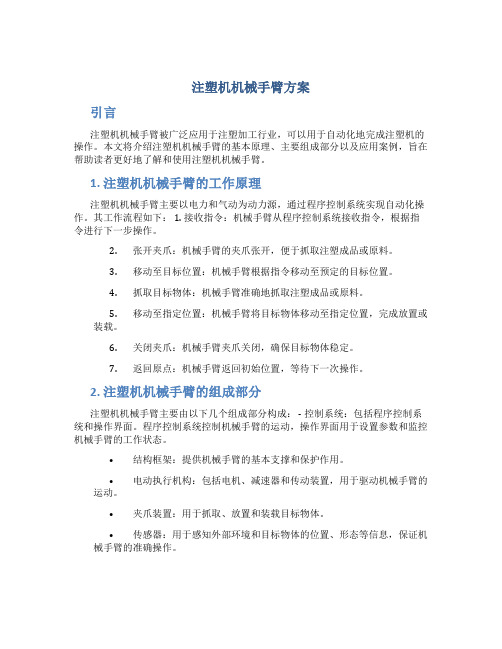
1. 注塑机机械手臂的工作原理注塑机机械手臂主要以电力和气动为动力源,通过程序控制系统实现自动化操作。
其工作流程如下: 1. 接收指令:机械手臂从程序控制系统接收指令,根据指令进行下一步操作。
2.张开夹爪:机械手臂的夹爪张开,便于抓取注塑成品或原料。
3.移动至目标位置:机械手臂根据指令移动至预定的目标位置。
4.抓取目标物体:机械手臂准确地抓取注塑成品或原料。
5.移动至指定位置:机械手臂将目标物体移动至指定位置,完成放置或装载。
6.关闭夹爪:机械手臂夹爪关闭,确保目标物体稳定。
7.返回原点:机械手臂返回初始位置,等待下一次操作。
2. 注塑机机械手臂的组成部分注塑机机械手臂主要由以下几个组成部分构成: - 控制系统:包括程序控制系统和操作界面。
程序控制系统控制机械手臂的运动,操作界面用于设置参数和监控机械手臂的工作状态。
•结构框架:提供机械手臂的基本支撑和保护作用。
•电动执行机构:包括电机、减速器和传动装置,用于驱动机械手臂的运动。
•夹爪装置:用于抓取、放置和装载目标物体。
•传感器:用于感知外部环境和目标物体的位置、形态等信息,保证机械手臂的准确操作。
3. 注塑机机械手臂的应用案例注塑机机械手臂在注塑加工行业中有着广泛的应用,以下是一些典型的应用案例:3.1 自动取料注塑机机械手臂可以自动进行原材料的取料操作,提高生产效率和产品质量。
通过程序控制系统,机械手臂可以准确地抓取原料,并将其放置到注塑机的料斗中。
3.2 自动装卸成品注塑机机械手臂可以自动完成成品的装卸操作,避免了人工操作的繁琐和误操作的风险。
机械手臂可以准确地抓取注塑成品,并将其放置到指定位置,如传送带或包装箱中。
3.3 模具更换注塑机机械手臂可以辅助进行模具的更换,提高生产线的灵活性和效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
大型横走机配置和用途:1.大型横走械手系列适用于350~4000顿的各型卧式射出成型机的成品及水口取出.2.手臂形式有单截式和双截式;上下行程从1200~3000mm.可增加副臂用于三片模,同时夹成品与水口.3.横行轴标准为变频马达驱动(也可根据实际需要来选购AC伺服马达驱动).4.上下,引拔为气缸驱动,节省成本.成品臂上下轴可根据需要选购AC伺服马达驱动,增加模内的取出效率.5.安装机械手可以提高产能(20~30%),降低产品的不良率和精准的控制生产量.6.可保障操作人员的安全性,减少浪费.机体结构:1.横行轴标准采用变频马达驱动,也可以选购AC伺服马达驱动,定位精度可达±0.1mm.2.上下及引拔轴标准使用气缸驱动,正臂上下可选购AC伺服马达驱动,横行\引拔\上下均使用精密直线高刚性线性滑轨,耐磨耗寿命长.3.上下手臂使用质量轻高刚性的铝合金挤型结构梁,可达到取出速度快,震动小,高效能及使用寿命长的要求.模组化设计大量生产,零件互换性强.侧姿倒角机构可配合公模或母模取出,固定倒角90°.双截式手臂采用高刚性线性滑轨及铝合金结构梁,特殊设计的皮带倍速机构,大幅度的缩短上下手臂的结构高度,上下气缸只需一半的行程即可达到全行程.除了可以增加上下行的速度及稳定性,并且可配合厂房高度低的场所.选购功能:1.引拔电动调整:引拔位置,行程电动遥控调整,节省调整时间增加操作的安全性.2.上下电动调整行程:上下行程电动遥控调整,即可节省调整时间又可增加操作的安全性.3.横行轴数位控制:数位设定横行行程,可多点及循环置放成品,最多可放99点,用于排列成品.4.横行伺服马达驱动:横行轴可选用AC伺服马达驱动,并采用精密级行星减速机以皮带传动,速度快定位精准;定位精度达±0.1mm,可应用于需定位精准之取出.5.喷离型剂组:可以设定几模喷/每次喷多久/喷头可以装在手臂或模具上,最多可以设定两组.6.中板检测:应用于三板模时确认中板位置,避免副臂撞到模具.7.成品光电检测:放置成品于输送带上防止成品互撞.8.空压剪装置:可以安装于手臂上或横行端剪料头.9.模外置物慢速下行:可以避免撞伤操作人员.备注:此系列机型横行轴数位控制,横行伺服马达驱动,上下轴伺服马达驱动三种选购功能只能三选一.机体结构中型横走机械手:配置和用途:1. 中型横走机械手系列适用于80-600T的各型卧式射出成型机的成品及水口取出。
2. 手臂型式为双截式;可增加副臂用于三片模,同时夹成品与水口;上下行程从800-1200mm为气缸驱动。
3. 横行驱动方式:标准为变频马达驱动(可选购AC伺服马达驱动)。
4. 成品臂上下轴可依需要选购AC伺服马达驱动,增加模内的取出效率。
5. 机械手可以提高产能、降低产品的不良率和精准的控制生产量。
6. 保障操作人员的安全性、减少人工和浪费。
结构和功能:1.横行轴采用变频马达驱动(也可以选购AC伺服马达驱动),上下及引拔使用气缸驱动。
2.横行、上下手臂均采用进口的高刚性铝合金挤型梁配合高刚性精密线性滑轨,能达到取出速度快、高效能、高精度、使用寿命长的要求。
3.双截式手臂采用特殊设计的皮带倍速机构,可缩短上下手臂的结构高度,上下气缸只需一半的行程即可达到全行程和配合厂房较低之场所。
4.侧姿倒角机构可配合动模或定模取出和固定倒角90度。
5.治具预留气压管路与检测讯号,预留一吸一抱两个回路,可供吸夹抱等治具的取出应用,可应用于各种成品多样化的取出。
6.变频马达驱动横行轴采用进口高刚性精密线性滑轨,动作平稳.顺畅.耐磨和使用寿命长。
人性化设计:1. 控制系统对话式操作,可以切换中文或英文页面,操作简单和容易学习2. 8组内建标准程式和20组的模具记忆,可随意搭配使用,具备L/U型取出功能,并可搭配置物方式、侧姿选择和顶针设定等功能.3. 自动检测故障情况并自动记录.4. 可在定模方向取出,搭配各项侧姿动作,也可选择不同的置料方式(横出置料、横入置料和外侧同时置料)。
5. 所有的计时、计数均可在自动运转模式中修改。
6. 模组化的控制板设计,更换维修方便;重视与射出机的连结安全规范,所有与成型机的输入输出讯号都使用干接点讯号,以防止相互干扰。
7. 备用输出点可以连接其他自动化设备,如输送带和承接台等。
8. 可选购CE机型,符合EUROMAP 12 or 67与SPI的标准,并附有标准接口。
9. 可选购中板检测和置物安全检测等,避免副臂撞模,搭配全厂自动化使用。
10. 横行轴可选购AC伺服马达驱动,并采用精密级行星减速机和齿轮. 齿条传动,速度快.定位精准,定位精度高达±0.1mm。
选购配置:A.引拨行程和上下行程电动遥控调整,节省调整时间和增加操作的安全性。
B.成品臂上下轴由AC伺服马达驱动,可快速的上下行动作,节省模内取出时间,增加效率,并可在模外设置不同的置物高度,定位精度为±0.2mm。
C.模外置物慢速下行,可避免撞伤操作人员。
D.横行伺服马达、上下轴伺服马达驱动二种选购功能只能二选一。
轻型横走机械手配置和用途:1.轻型横走机械手系列适用于50~300T的各型卧式射出成型机的成品及水口取出。
2.单截式型号有LPL-Q550/Q650,双截式型号有LPL-Q750/Q850,上下行程从550~850mm,可用于三片模同时夹成品与水口。
3.横行驱动方式:气压驱动和变频马达驱动(可选购AC伺服马达驱动)。
4.机械手可以提高产能、降低产品的不良率和精准的控制生产量。
5.保障操作人员的安全性、减少人工和浪费。
结构和功能:1.横行轴采用无杆缸驱动或变频马达驱动(也可以选购AC伺服马达驱动),上下及引拔轴使用气缸驱动。
2.横行、上下手臂均采用进口的高刚性铝合金挤型梁与线性滑轨.配合高刚性轴承钢,能达到取出速度快、高效能、高精度、使用寿命长的要求。
3.双截式手臂采用特殊设计的皮带倍速机构,可缩短上下手臂的结构高度,上下气缸只需一半的行程即可达到全行程和配合厂房较低之场所。
4.侧姿倒角机构可配合动模或定模取出和固定倒角90度。
5.治具预留气压管路与检测讯号,预留一吸一抱两个回路,可供吸夹抱等治具的取出应用,可应用各种成品多样化的取出。
6.无杆缸驱动LPL-Q550/Q650横行轴采用进口无杆缸驱动,配合高刚性精密线性滑轨,动作平稳.顺畅.耐磨和使用寿命长,两端均采用气压缓行及油压缓行器,停止平稳。
人性化设计:1. 控制系统对话式操作,可以切换中文或英文页面,操作简单和容易学习2. 8组内建标准程式和20组的模具记忆,可随意搭配使用,具备L/U型取出功能,并可搭配置物方式、侧姿选择和顶针设定等功能.3. 自动检测故障情况并自动记录.4. 可在定模方向取出,搭配各项侧姿动作,也可选择不同的置料方式(横出置料、横入置料和外侧同时置料)。
5. 所有的计时、计数均可在自动运转模式中修改。
6. 模组化的控制板设计,更换维修方便;重视与射出机的连结安全规范,所有与成型机的输入输出讯号都使用干接点讯号,以防止相互干扰。
7. 备用输出点可以连接其他自动化设备,如输送带和承接台等。
8. 可选购CE机型,符合EUROMAP 12 or 67与SPI的标准,并附有标准接口。
9. 可选购中板检测和置物安全检测等,搭配全厂自动化使用。
10.横行轴可选购AC伺服马达驱动,并采用精密级行星减速机和齿轮. 齿条传动,速度快.定位精准;定位精斜臂式机械手配置和用途1. 斜臂式机械手系列适用于15~280顿的各型卧式射出成型机,用于取出两板模的成品及水口。
2. 型号有LPL~X450/X550/X650/X750/X850, 手臂形式有单截式和双截式;上下行程从450~850mm,专用于两板模具。
3. 单功能用于夹水口,全功能可以夹水口或同时夹水口与吸成品。
4. 机械手可以提高产能、降低产品的不良率和精准的控制生产量。
5. 保障操作人员的安全性、减少浪费。
结构和功能1.双截式手臂采用特殊设计的皮带倍速机构,可缩短上下手臂的结构高度,上下气缸只需一半的行程即可达到全行程,并且可配合厂房高度较低之场所。
2.左右旋转结构,方便调整置物方向,不需更换气管及磁簧开关。
3.夹具旋转机构,可以旋转90°放置成品及水口。
4.换模调整机构,换模时仅需将固定把手松开,全机可旋转90°,提升换模效率。
5.全机采用铝合金精密铸造,搭配精密加工,整机稳固可以承受高速运动,耐久使用。
6.上下手臂采用进口的高刚性线性滑轨,引拔采用质量轻高刚性铝合金挤型梁配合线性轴承及高刚性轴承钢,能达到取出速度快、高效能、高精度、使用寿命长的要求。
人性化设计1. 控制系统对话式操作,可以切换中文或英文页面,操作简单和容易学习。
2. 8组内建标准程式,可储存12组教导程式,完全满足生产各种产品的需求及形式。
3. 50组模具记忆功能,可以节省换模的设定调整。
4. 自动检测故障并自动记录,方便故障排除。
5. 手动操作时,可以显示所有的输出与输入接点于操作介面上,维修方便快速。
6. LED显示重要讯号,如安全门、开模完、允许关模、顶针和成品检测。
7. 备用输出点可以连接其他自动化设备,如输送带和承接台等。
8. 自动运转下可以修改各项延迟时间与计数,操作简单方便。
9. 可选购CE机型,符合EUROMAP与SPI的标准。
立式机械手:配置和用途:1.立式机械手适用于50~180吨的各型立式射出成型机,用于取出成品及水口.2.型号有LPL-V550/LPL-V650,手臂形式有单截式;上下行程从550~650mm,专用于两板模具.3.机械手可以提高产能,降低产品的不良率和精准的控制生产量.4.保障操作人员的安全性,减少浪费.结构和功能:1.左右旋转结构,方便调整置物方向,不需更换气管及磁簧开关.2.夹具旋转机构,可以旋转180°放置成品及水口.全机可旋转45°,90°.3.上下手臂采用进口的高钢性线性滑轨,引拔采用质量轻高钢性铝合金挤型梁配合线性轴承及高钢性轴承钢,可达到取出速度快,高效能,高精度,使用寿命长的要求.人性化设计:1.控制系统采用对话式操作,可以切换中英文页面,操作简单和容易学习.2.8组内建标准程式,可储存12组教导程式,完全满足生产各种产品的需求及形式.3.50组模具记忆功能,可以节省换模后的设定调整.4.自动侦测故障并记录,方便故障排除.5.手动操作时,可显示所有输入,输出接点于操作界面上,维修方便快速.6.LED显示重要信号,如安全门,开模完,允许关模,允许托进和成品检测.7.备用输出点可以连接其它的自动化设备,如输送带和承接台等.8.自动运转下可修改各项动作的延迟时间与记数,操作简单方便.9.可以选购CE机型,符合EUROMAP与SPI的标准.纵走机械手:配置及用途:1.纵走系列机械手适用于50~450顿的各型卧式射出成型机的成品及水口取出.2.手臂形式有单截式和双截式;上下行程从600~1000mm.可增加副臂用于三片模,同时夹成品与水口. 3.横行轴标准为AC伺服马达驱动.4.安装方向与传统的横走式不同,是将成品与料头取出放置于射出机尾端,可以节省射出机的放置空间.上下,引拔为气缸驱动,节省成本.增加模内的取出效率.5.安装机械手可以提高产能(20~30%),降低产品的不良率和精准的控制生产量.可保障操作人员的安全性,减少浪费.机体结构:1.横行轴标准采用变频马达驱动,也可以选购AC伺服马达驱动,定位精度可达±0.1mm.2.上下及引拔轴标准使用气缸驱动,横行\引拔\上下均使用精密直线高刚性线性滑轨,耐磨耗寿命长.3.上下手臂使用质量轻高刚性的铝合金挤型结构梁,可达到取出速度快,震动小,高效能.4.使用寿命长的要求.模组化设计大量生产,零件互换性强.5.双截式手臂,采用高刚性线性滑轨及铝合金结构梁,特殊设计的皮带倍速机构,大幅度的缩短上下手臂的结构高度,上下气缸只需一半的行程即可达到全行程.除了可以增加上下行的速度及稳定性,并且可配合厂房高度低的场所.人性化设计:1.控制柜与机体结构合于一体,节省空间,模组化的控制板设计,更换维修非常方便.2.控制面板采用对话式操作,可以切换中文或英文页面,操作简单易学.3.内建标准程式,可以随心所欲的搭配使用,具L/U型取出功能,并可搭配置物方式,侧姿选择,顶针设定,不良品警报等功能,完全满足生产各种产品的需求及形式.4.20组模具记忆功能,可以节省换模后的设定调整.5.可自动检测故障情况显示于幕面并自动记录,方便故障排除.6.手动操作时,可以显示所有的输入,输出接点于操作界面上,维修方便快速.7.备用输出点可以连接如输送带和承接台等.8.自动运转下可以修改各项动作的延迟时间与记数,操作简单方便.9.特别重视与射出机的连接安全规范,所有与成型机的输入输出信号都使用干接点信号,以防止相互干扰.10.可以选购CE机型,符合EUROMAP与SPI的标准,并附有标准接口.。