GPS信号捕获与跟踪策略确定及实现
GPS弱信号的捕获与跟踪的算法研究

重庆大学硕士学位论文GPS弱信号的捕获与跟踪的算法研究姓名:***申请学位级别:硕士专业:信号与信息处理指导教师:***20120531重庆大学硕士学位论文中文摘要摘要全球卫星定位系统能全天候地、实时地为人们提供位置、测速和授时服务。
但是,在城市街道、森林、峡谷和室内环境等受到阻挡条件下,GPS信号功率受到极大的损耗。
普通的GPS接收机无法在这样弱信号条件下正常工作,因此,高灵敏GPS接收机技术逐渐成为GPS技术发展与应用领域的研究热点之一。
GPS信号的捕获与跟踪技术是GPS接收机中的关键技术,因此,开展GPS弱信号捕获与跟踪算法的研究具有良好的学术价值和重要的理论意义。
本文首先阐述了GPS信号由导航数据、C/A码和载波构成,并说明C/A码的高自相关性和低互相关性是GPS信号成功捕获的基础。
由于多普勒的影响,GPS信号捕获搜索的频率范围为.10kHz~10kHz。
接着分析了单次相干累加可用的最大数据长度和多普勒频移步长对信号捕获的影响。
研究与分析了唐搜索检测器、相干一非相干累加和差分相干累加捕获算法,并用matlab仿真了在不同的4和B条件时,唐搜索检测器捕获算法中捕获灵敏度和平均滞留次数的对应关系,仿真分析了相干.非相干累加算法和差分相干累加算法的捕获效果。
本文对唐搜索检测器算法中的检测统计变量进行改变,将相邻相干积分平方之和作为新的检测统计变量,较好地提高了信号捕获的灵敏度,可是增加了每个单元的平均驻留次数,延长了捕获时间。
采用二阶锁频环辅助三阶锁相环作为载波跟踪环结构,能较好地跟踪载噪比为30dB/Hz和相对加速度为129的低载噪比高动态GPS信号,并能正确地解调出导航数据。
关键词:GPS弱信号,捕获,跟踪,锁相环,锁频环ABSTRACTG10balpositioningsystemcallsupplytheservicewhichincludesposition,velocityandSOonandtimeforpeople.Butinthecitystreets,forest,gorge,indoorenvironmentreceiversi印a1beingobstructed,GPSsignallevelsuffersagreatloss.TheordinaryGPSsensitivityGPScannotworl(properlyinsuchaweaksignalconditions.Therefore,highreceivertechnologyhasgraduallybecomeoneofthehotspotsofGPStechnologyfieldtoday.Atthesametime,thesignaldevelopmentandapplicationofresearchinthethekeytechnologiesoftheGPSreceiveracquisitionandtrackingtechnologyareandtrackingalgorithmoftechnology,therefore,developingtheresearchofacquisitionGPSweaksignalhasagoodacademicvalueandimportanttheoreticalsignificance·isconstitutedbyFirstlⅥthispaperdescirbestheconstitutionofGPSsignal,whichautocorrelationandnavigationdata,C/Acodeandcarrier,anditisthatC/Acodehighsignal.Becauseofthelowcross.correlationisthebasisofsuccessfulcaptureofGPSimpactofDoppler,thefrequencyrangeoftheGPSsignalacquisitionsearchIS.10kHz~10kHz.ThenanalyzetheimpactofGPSsignalacquisitionwhichisabouttheaVailablemaxim啪datalengthandthestepofDopplerfrequency.ResearchandanalyzetheacquisitionalgorithmofTongsearchdetectors,coherent—noncoherentaccumulationanddifferentialcoherentaccumulation,andsimulatetherelationshipsearchbetweenthesensitivityofacquisitionandthenumberofmeanresidenceofTongdetectorsalgorithmunderdifferentconditionofAandBbytheMatlabsoftware,accumulationalgorithmandandsimulatecaptureeffectofcoherent-noncoherentdifferentialcoherentaccumulationalgorithm.algorithmaimprovementInthispaper,maketheoriginaltheTongsearchdetectorwllichaddstheadjacentthesquareofcoherentintegralasanewstatisticaltestvariable,signal,butincreaseaveragedwellnumbersOimprovetheacquisitionsensitivityofGPSassistanceofeachunit,andextendthetimeofGPSsignalacquisition.Adopt3mPLLonof2naFLLforthestmc眦ofcarriertrackingloop,anditispossibletotracktheGPSsignalwhosecartiertonoiseratiois30dB/Hzandaccelerationis129lowcarriertodata·noiseranoandhighdynamicGPSsignal,andcorrectlydemodulatethenavigationlockedKeyword:GPSweaksignal,acquisition,tracking,phaselockedloop,frequencyloopII1绪论1.1课题的研究背景及意义全球定位系统(GlobalPositioningSystem,GPS)是一个基于人造卫星、面向全球、为人们提供全天候的实时、定时和连续、精确定位系统【l儿21。
GPS软件接收机中信号捕获、跟踪算法的研究与实现中期报告
GPS软件接收机中信号捕获、跟踪算法的研究与实现中期报告一、研究背景随着GPS技术的不断发展,GPS接收机在各个领域得到广泛应用。
在GPS应用中,信号捕获、跟踪算法是GPS接收机的重要组成部分,它决定了接收机的性能和精度。
因此,对GPS信号捕获、跟踪算法的研究和实现具有重要意义。
二、研究现状目前,GPS信号捕获、跟踪算法主要分为两类:基于时域的算法和基于频域的算法。
其中,时域算法有单点搜索法、Hilbert-Huang 变换法等,频域算法则有二次互相关法、离散小波变换法等。
三、研究内容本研究将主要研究和实现以下内容:1.分析GPS信号的数学模型和特点,理解GPS信号的结构和原理;2.分析GPS信号的捕获、跟踪过程,研究GPS信号处理的基本方法;3.研究和实现不同的信号捕获、跟踪算法,包括多点搜索法、Costas 环路跟踪法、相位锁定环路跟踪法等;4.对比不同算法的性能和精度,分析各自的优点和适用范围;5.在基于FPGA的GPS软件接收机中实现上述算法,并进行性能测试和验证。
四、研究计划本研究计划分为以下阶段:1.阅读有关GPS信号处理和算法的文献,理解GPS信号处理的基本原理(已完成);2.选定不同的信号捕获、跟踪算法,进行分析和比较(正在进行);3.在Matlab环境下实现各种算法,并进行性能测试;4.基于FPGA实现GPS软件接收机,并将各种算法移植到硬件平台上;5.对比硬件实现和软件实现的性能和精度,进行实验验证并撰写论文。
五、初步结论本研究通过对GPS信号捕获、跟踪算法的研究和实现,可以提高GPS软件接收机的性能和精度,对应用于军事、航空、航海、交通等领域具有重要意义。
同时,该研究还可以为其他卫星导航系统的信号处理提供借鉴和参考依据。
基于GPS单频软件接收机的捕获与跟踪算法实现

踪 环 I 支路 的输 出 , 7 b 是跟 踪环 Q 支 路 的输 图 ()
相 关 值 ×1 0
二研 F _
毖
0 0 0
() 6
c z去 一
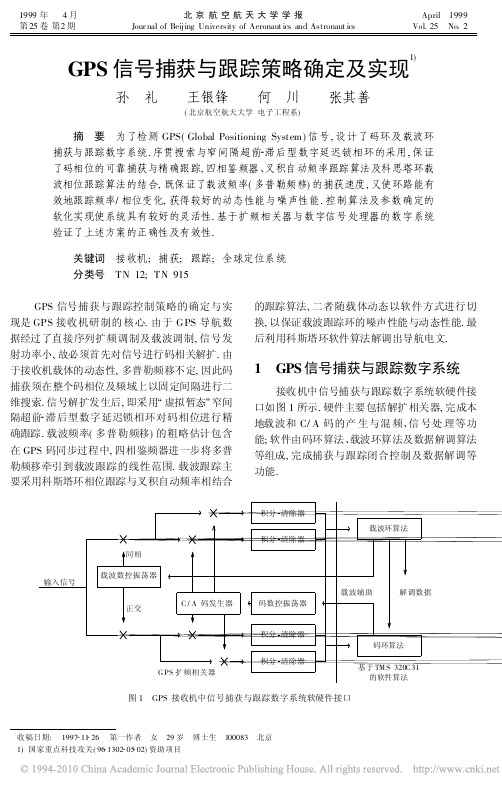
航 接收 机融入 了软 件无线 电思 想 , 突破 了 以往 接收 机 功能 单一 、 可扩展 性 差和 以硬件 为核 心 的设计 局 限 。软 件接 收机具 有前 端硬件 的可重用 性 、 件 的 软
可升级 性 、 能 的可配 置性 , 功 以及 平 台的通用 性 、 灵 活性 、 开放性 , 为导 航 接 收 机 的发 展 方 向 。本 成 ]
一 a ca ( ) rt n
』 p
() 4
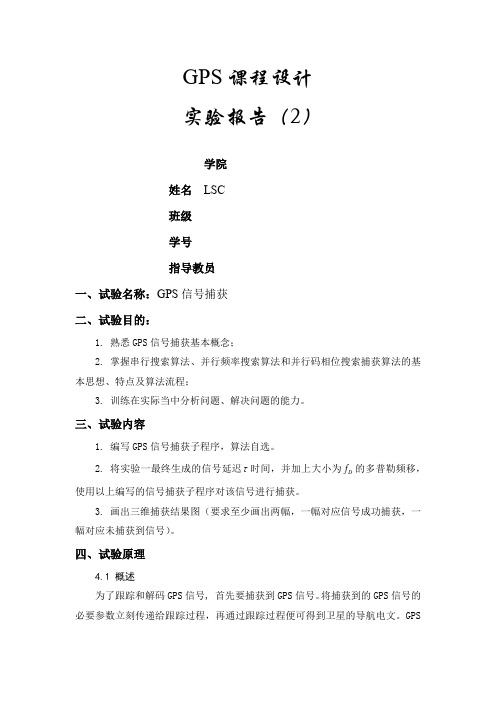
3 1 码 跟 踪 环 .
在 高信 噪 比和低 信 噪 比情 况 下都 有 最优 的鉴 相特性 , 相斜 率不 受信号 幅度 影 响I 。鉴相 器 的 鉴 6 ] 输 出用来 调 整本 地 NC 的频 率 , O 以保 证 环路 可 以 连续地 对输 入 信 号进 行 解 调 。锁 相 环需 要 根 据 所 要 处 理 的信 号特 性来 选取 , 锁相 环最佳 化 的理论 准
表示 为
N- 1 -
() 2 xm) ( + n 一 ( yn )
m 0
() 1
对 ( 进行 离散 傅立 叶变 换 ( T) 结 果 为 ) DF ,
N一 1 N一 1
z忌 =∑ ∑xmyn ) ( = )= ()(+ e
=
0 m = O
图 3 码 跟 踪 环 和 载 波跟 踪 环
图 2 基 于 F T的 并 行 码 相 位 搜 索 捕 获 算 法 F
GPS信号捕获与跟踪策略确定及实现
sin( ∀k - ∀k- 1) + ^n 3( k )
( 5)
假定连续采样输出数据的数据位不变, 即有
1 36
北京 航 空 航 天 大 学 学 报
1999 年
跟踪 环( FL L ) 比三 阶相位锁 定环( PL L ) 具 有几 dB 信噪比域值的动态性能优势[ 4] , 但其跟踪精度 低, 二者存在一定的矛盾. 本系统的载波环设计中 采用了适用载体动态的载波跟踪策略, 即采用四 相鉴频牵引进一步捕获多普勒频率、初始跟踪采 用动态能力强的 F LL 消除动态、稳态跟踪采用热 噪声误差小的 PL L 提高载波相位的基本方案, 使 得跟踪环能够同时满足动态性能与跟踪精度的要 求, 而环路参数的可编程设置以及动态 变化时 2 种跟踪策略的软切换方式保证了跟踪的灵活性与 稳健性. 3. 1 科斯塔环载波相位跟踪
满足噪声性能的要求.
3 载波捕获与跟踪环路
由于接收机载体的动态性, 载波跟踪环设计 必须考虑多普勒频移对载波频率的影响. 对于一 般接收机而言, 载波捕获与跟踪常采用科斯塔环 重构载波相位相干解调 BPSK ( 二相相移键控) 数 据实 现[ 3] . 相 干系 统对 高斯 噪声具 有 较好 的性 能, 但对通信链路干扰的容忍能力较差, 特别是受 载体动态引入的多普勒频移影响较大. 对于强机 动环境的 GPS 接收机, 为适应平台的动态性, 科 斯塔环必须具有相对宽的带宽, 这意味着信噪比 阈值性能即跟踪能力降低, 此时相干解调不再适 合. 可取的方案是采用非相干解调, 即环路自动跟 踪频率而不是相位. 对于相同动态, 二阶频率锁定
GPS软件接收机信号的快速捕获与跟踪

GPS软件接收机信号的快速捕获与跟踪
刘娣;薄煜明;赵高鹏
【期刊名称】《计算机工程》
【年(卷),期】2010(036)001
【摘要】根据GPS软件接收机对数据块进行信号处理的工作方式,研究基于快速博里叶变换的循环相关法伪码快速捕获与跟踪技术.基于实测GPS中频数据,采用循环相关法在频域计算输入信号与本地信号的相关值,由相位关系得到精细载频.仿真结果表明,该技术能减少运算量,缩短捕获时间.得到的载频能满足跟踪环对频率分辨率的要求.对跟踪结果进行子帧匹配和奇偶校验后,可以获得导航电文信息.
【总页数】3页(P239-241)
【作者】刘娣;薄煜明;赵高鹏
【作者单位】南京理工大学自动化学院,南京,210094;南京理工大学自动化学院,南京,210094;南京理工大学自动化学院,南京,210094
【正文语种】中文
【中图分类】P228.4
【相关文献】
1.一种GPS软件接收机信号快速捕获算法研究 [J], 李亚峰;王新龙;纪新春
2.基于软件无线电平台的低轨卫星扩频通信的信号快速捕获和跟踪 [J], 杨波;王跃科;杨俊;宫二玲;周永彬
3.非法卫星电视信号全方位快速定位、跟踪捕获及自适应压制系统 [J], 宫宝文;王小利
4.GPS软件接收机的信号捕获和跟踪 [J], 鲍雍荣;李振波;陈佳品
5.GPS软件接收机信号快速捕获新方法 [J], 顾建华;严国军;杨久东
因版权原因,仅展示原文概要,查看原文内容请购买。
GPS信号捕获原理

二、GPS 信号的捕获2.1 GPS 信号模型GPS 的射频信号L1频段是1575.42MHz, 对其进行下变频到中频后,以s f 为采样率得到的采样信号可以表示如下:()()()()(){}()2,0,01,,,,cos 2sat N k sat sat k sat dsat sat k sat dsat nk sat IF dsat k sat k k sat r t A d t f C t f f f t t n t ττθθππα==+++++∑ 其粗略的中频信号模型可以如下表示:()()()[]t T t C T t D P S dopp IF d d r ϖϖ+--=cos 2 2.2 GPS 信号的捕获2.2.1信号捕获原理信号捕获的目的是使本地产生的复制C/A 码与接收到的调制在载波上的C/A 码同步,以实现相关解扩与码相位精确跟踪。
GPS 天线所接收到的 GPS 信号淹没在热噪声中,不易于捕获和跟踪。
GPS 信号的捕获利用 C/A 码的强自相关特性,在对应不同码相位偏移、不同多普勒偏移的相关值中找出相关峰值,从而确定卫星信号的存在及其码相位偏移和载波频率(包括载波多普勒频移)的信息。
当接收机产生的码相位和载波频率必须与接收到的码相位和载波频率相匹配,使得相关值高于信号检测阈值,完成伪码捕获和载波频率捕获,进而对信号进行跟踪。
根据导航卫星信号的特点,其信号的捕获常采用二维的搜索方式。
在二维搜索法中,信号的捕获基于时域(伪码相位)和频域(多普勒频移)的二维空间进行(见图1)。
图1 GPS信号捕获中的二维搜索2.2.2信号搜索方法2.2.2.1步进相关法本地码生成器以C/A码标称频率(6Hz)产生C/A码与接收1.02310到的采样信号相关累加,一个积分周期(通常1个码周期)后,相关峰与检测门限比较,如果相关峰大于门限,则认为捕获成功,得到对应的码相位估计;如果相关峰小于门限,码发生器自动将本地码码相位向前或向后跳动1/2或1/4个码片,然后继续相关累加检测,最多在2L或4L个伪码周期后找到与本地伪码同步的输入伪码的相位状态(L即为一个码周期内码片的数目),以实现伪码的捕获。
GPS信号捕获原理

二、GPS 信号的捕获2.1 GPS 信号模型GPS 的射频信号L1频段是1575.42MHz, 对其进行下变频到中频后,以s f 为采样率得到的采样信号可以表示如下:()()()()(){}()2,0,01,,,,cos 2sat N k sat sat k sat dsat sat k sat dsat nk sat IF dsat k sat k k sat r t A d t f C t f f f t t n t ττθθππα==+++++∑ 其粗略的中频信号模型可以如下表示:()()()[]t T t C T t D P S dopp IF d d r ϖϖ+--=cos 2 2.2 GPS 信号的捕获2.2.1信号捕获原理信号捕获的目的是使本地产生的复制C/A 码与接收到的调制在载波上的C/A 码同步,以实现相关解扩与码相位精确跟踪。
GPS 天线所接收到的 GPS 信号淹没在热噪声中,不易于捕获和跟踪。
GPS 信号的捕获利用 C/A 码的强自相关特性,在对应不同码相位偏移、不同多普勒偏移的相关值中找出相关峰值,从而确定卫星信号的存在及其码相位偏移和载波频率(包括载波多普勒频移)的信息。
当接收机产生的码相位和载波频率必须与接收到的码相位和载波频率相匹配,使得相关值高于信号检测阈值,完成伪码捕获和载波频率捕获,进而对信号进行跟踪。
根据导航卫星信号的特点,其信号的捕获常采用二维的搜索方式。
在二维搜索法中,信号的捕获基于时域(伪码相位)和频域(多普勒频移)的二维空间进行(见图1)。
图1 GPS信号捕获中的二维搜索2.2.2信号搜索方法2.2.2.1步进相关法本地码生成器以C/A码标称频率(6Hz)产生C/A码与接收1.02310到的采样信号相关累加,一个积分周期(通常1个码周期)后,相关峰与检测门限比较,如果相关峰大于门限,则认为捕获成功,得到对应的码相位估计;如果相关峰小于门限,码发生器自动将本地码码相位向前或向后跳动1/2或1/4个码片,然后继续相关累加检测,最多在2L或4L个伪码周期后找到与本地伪码同步的输入伪码的相位状态(L即为一个码周期内码片的数目),以实现伪码的捕获。
GPS信号的捕获与跟踪

电子工程学院141GPS信号的捕获与跟踪第七章 GPS信号的捕获与跟踪前几章讲述了GPS系统结构和GPS定位原理,本章介绍GPS软件接收机和GPS信号处理方法,主要探讨对GPS信号进行捕获和跟踪的过程。
捕获的目的是搜索到可视卫星,并粗略地确定卫星信号的载波频率和伪码相位,跟踪的目的则是精确地跟踪信号的载波频率和伪码相位的变化,完成GPS信号解扩和解调,从而提取出导航电文、伪距观测量等。
7.1 GPS软件接收机目前广泛使用的GPS接收机一般均基于ASIC(Application Specific Integrated Circuit)结构,又称为硬件接收机,结构如图7-1所示。
硬件接收机的数字接收机通道(包括捕获、跟踪的相关运算)一般用一个或几个专用GPS信号通道处理芯片(ASIC)来实现,接收机微处理器从ASIC输出的相关输出结果译出导航数据,从而可以得到卫星星历及伪距,星历可用来得到卫星位置,并最终可由卫星位置及伪距解算出用户位置等信息。
这类ASIC芯片具有运行速度快、成本低的特点。
但由于ASIC限制了接收机的灵活性,用户不能轻易改变硬件接收机各类参数以适应随着GPS发展的升级需要;同时近年来出现了许多减少导航定位误差和提高抗干扰能力的算法,如抗多径跟踪环路设计、高动态的跟踪环路设计等,对于硬件接收机测试和使用新的算法,不便之处显而易见。
随着软件无线电思想的发展,GPS软件接收机的设计与实现逐渐成为研究热点。
图7-1 GPS传统硬件接收机框图软件无线电(Software Radio)的概念是由美国科学家J.Mitola于1992年5月在美国电信系统会议上首次明确提出的。
随着通信技术的迅速发展,新的通信体制与标准不断提出,通信产品的生存周期缩短,开发费用上升,导致以硬件为基础的传统通信体制无法适应这种新局面。
同时不同体制间互通的要求日趋强烈,而且随着通信业务的不断增长,无线频谱变得越来越拥挤,这对现有通信系统的频带利用率及抗干扰能力提出了更高的要求,但是沿着现有通信体制的发展,很难对频带重新规划。
第七章GPS信号的捕获与跟踪

用户位置 计算
码 跟踪
载频 跟踪
数据位 同步
解码 导航数据
读取 卫星位置
计算 伪距
2
GPS卫星信号
3
GPS中的多普勒频移
2 / (11 3600 58 60)
1.4585104 rad / s
卫星周期11小时58分
r 265601.4585104
18
School of Electronic Engineering
PRN code demodulation
Incoming signal Local PRN code Result of multiplication
19
FFT频域捕获方法
基于循环相关的快速捕获方法
基于循环相关的快速捕获方法
51
码相位鉴别器
52
鉴别器输出与码元差的关系曲线
53
GPS接收机的跟踪环
54
9
卫星搜索的数量
卫星搜索的数量范围:0~32颗 ; 卫星搜索数量对捕获精度没有影响; 必须能成功捕获到4颗或更多颗卫星; 两种搜索方式:
利用星历搜索方式:利用用户位置估计值、 GPS时间估计值和最近几天内的历书,计算出 卫星的位置,然后确定哪颗卫星为可见卫星 ; 满天搜索方式:搜索所有可能的卫星PRN码 。
4.9kHz
6
捕获的三维搜索
7
捕获的三维搜索
信号中存在哪些卫星的信号,即存在哪些 PRN码调制的信号; 对每一个存在的PRN码信号,提取其多普 勒频移; 对每一个存在的PRN码信号,提取其伪码 相位。
8
GPS信号捕获的关键参数
卫星搜索的数量 捕获使用数据的长度 载波频率搜索范围和频率搜索步长 码相位搜索空间,码相位搜索步长
GPS软件接收机的信号捕获和跟踪

Ac ust n a d Tr c ig f PS So t r c ie q iio n a kn orG f i wa e Re ev r
处理 速度快 , 但是 成 本 较 高 , 一旦 设 计 成 型后 , 且 无 法改 变 , 配置 不够 灵 活 。
软件 接收 机 , 名 思 义 , 指 采 用 通 用 处 理 芯 顾 是 片 , 实时 采集 的 G S卫 星 信 号 利用 一 定 的软 件算 对 P 法进 行处理 , 而实 现定 位 的设 备 , 有灵 活性 和可 从 具
1 G S软 件 接 收 机 简 介 P
随着 G S全 球定 位 系统 的 民用 化 , 在 普通 消 P 其 费者 中 的应 用 越 来 越 广 泛 。传 统 的 G S接 收机 主 P
计算 出位 置信 息 。
天 线
要 由接收 天 线 和 专 门硬 件 ( SC) 成 。其 优 点 是 AI 组
( 海交 通 大学微 纳科 学技 术研 究院微 系统 与集 成技术 研 究所 , 海 2 0 3 ) 上 上 000 摘 要 : 由于 G S软件 接 收机 的高度 灵 活性 , 应用 也 越 来越 广 泛 。这 里 我们 使 用 Z rn P 其 al k的 i
G2 1 P0 5和 G 4 2 件 电路 接 收卫 星信 号 , 其 降至 中频 I 将模 拟 信 号采 样 转为 数 字信 号。 之 P0 0硬 将 F,
后将 数 字信 号传 送 给 P c机 , P 在 c机上 用 Ma a t b对接 收到 的信 号 进 行 捕获 和跟 踪 , 后 将得 到 的 l 之 G S导航 信 号传 给后 面 的处理 模块 , 终得 到位 置坐标 。 P 最
GPS信号捕获
GPS课程设计实验报告(2)学院姓名LSC班级学号指导教员一、试验名称:GPS信号捕获二、试验目的:1. 熟悉GPS信号捕获基本概念;2. 掌握串行搜索算法、并行频率搜索算法和并行码相位搜索捕获算法的基本思想、特点及算法流程;3. 训练在实际当中分析问题、解决问题的能力。
三、试验内容1. 编写GPS信号捕获子程序,算法自选。
f的多普勒频移,2. 将实验一最终生成的信号延迟 时间,并加上大小为D使用以上编写的信号捕获子程序对该信号进行捕获。
3. 画出三维捕获结果图(要求至少画出两幅,一幅对应信号成功捕获,一幅对应未捕获到信号)。
四、试验原理4.1 概述为了跟踪和解码GPS信号, 首先要捕获到GPS信号。
将捕获到的GPS信号的必要参数立刻传递给跟踪过程,再通过跟踪过程便可得到卫星的导航电文。
GPS卫星处于高速运动中,因此,其频率会产生多普勒频移。
为覆盖高速卫星预期中的所有多普勒频率范围,捕获方法覆盖的频率范围必须在±10 kHz之内。
针对某个特定的卫星信号,捕获过程就是要找到C/A码的起始点,并利用找到的起始点展开C/A码频谱,一旦复现了C/A码的频谱,输出信号将变成连续波(Continuous Wave,CW),于是便得到其载波频率。
也就是说,捕获过程就是要获得输入信号的C/A码的起始点和载波频率,然后传递给跟踪过程。
4.2 卫星信号捕获的考虑4.2.1 捕获时的最大电文长度C/A码长1 ms,那么至少要用1ms的电文来捕获,甚至只用1 ms的电文来捕获时,都可能发生导航电文相位偏移。
因此,为了保证捕获电文中不含有数据偏移,需要用两组连续的电文来捕获,这个电文最大长度是10 ms。
如果使用两组连续的10 ms电文来捕获,就保证了在某一组电文中不含相位偏移。
限制电文长度的第二个因素是C/A码的多普勒效应。
4.2.2 捕获中的频率步长捕获时的另一个考虑因素是捕获中剥离载波所需的频率。
步进频率的大小与捕获中的电文长度紧密相关。
高动态下GPS信号的捕获和跟踪技术研究

!"#$%&’$: /E =SHI:;= CK= +,- B:@;HN :; K:@K GJ;HI:F B:CDHC:E;, :C :B ;=F=BBHLJ CE G=B:@; FEG= F:LFDB H;G FHLL:=L F:LFDB# +,- B:@;HNTB ?HBC HFUD:B:C:E; H;G CLHFV:;@ ML=F:B=NJ :B CK= V=J MLEWN=I# A; CK:B G:BB=LCHC:E;, ?EL CK= UD=BC:E; E? +,- B:@;HNB HFUD:B:C:E; H;G CLHFV:;@ D;G=L K:@K GJX ;HI:F F:LFDIBCH;F=, BEI= MLEWN=IB =S:BC=G :; L=F=:Q:;@ +,- B:@;HNB HL= H;HNJB=G, YK:FK :B WLED@KC WJ K:@K GJ;HI:F F:LFDIBCH;F=# 9HB=G E; CK= H;HNJB:B, ../ FEG= ?HBC HFUD:B:C:E; HN@EL:CKI, :;C=@LHC=G MKHB= NEFV:;@ H;G ?L=UD=;FJ NEFV=G CLHFV:;@ BCLHC=@J HL= ML=B=;C=G# Z=B:@;:;@ I=CKX EGB E? FEG= F:LFDB, FHLL:=L F:LFDB BCLDFCDL= H;G MHLHI=C=L HL= =SMNH:;=G# /K= B:IDNHC:E; L=BDNCB H;G H;HNJB:B BKEY CKHC CK= G=B:@;:;@ L=HN:R= CK= B:@;HNTB ?HBC HFUD:B:C:E; D;G=L K:@K GJ;HI:F F:LFDIBCH;F= H;G V==M GJ;HI:FB M=L?ELIH;F= H;G CLHFV:;@ ML=F:B:E; HC CK= BHI= C:I=# ()*+,%-#: +,-; K:@K GJ;HI:F; ../ FEG= ?HBC HFUD:B:C:E;; FHLL:=L CLHFV:;@ C=FK;:UD=
GPS卫星信号的捕获算法

上缩短捕获时 间。相 比较 来看 ,两种 算法都能
【 关键词 】G P S卫星信号 捕获算法
够增加新 的运算模块 ,主要是在执行中需要重 复多次利用 原有模 块,且搜索范围较小 ,捕获
辕1  ̄ ;
高效捕 获是 准确 定位 的前提 和基 础 ,捕 获算 法 决定 捕 获效 果,对 于接 收机 性 能具有 重要 影 响。 算 法 不 同,捕 获质 量 也有 所 差别 。 文章从 G P S信 号 结构 入 手 ,从 不 同方 面探 讨 G P S卫星 信 号捕 获 算 法 ,并借 助仿 真 结 果验证 捕 获 方
案 准 确性 。
方处理后得出结论 。如果本地与接收信号 的伪
码能够完全吻合 ,那么获得 的输 出值较 大。串
行搜索捕获算法实现起来更为简单 ,但 是搜 索 范围过大 ,且需要更 多的时间,无法实现对高
动 态 目标 的定 位 ,仅 适 用 于低 速 、 定 位 时 间 要 求 不 高 的 接 收 机 。而 并 行 频 率 空 间搜 索 算 法 , 只 需要对 C / A 码 移 位 即 可 , 能 够 在 很 大 程 度 图1 :G P S卫 星捕 获 算 法
数补零至 2 n ,进行 F F T运 算 。
( 2 )对本地信 号补零处理后 进行 F F T运 算,得出完整的结果。 ( 3 )将前两个数值进行相乘 。 ( 4 )确 定峰值位置 ,计 算出两帧跳 时
数。
参数进行估计 ,能够对模块对应 的参数予 以细 化处理,解调 出具体 的导航数据 ,为实际工作 提供 科学 依据 。文章 从 GP S信 号构 成入 手, 对不同的捕获算法进行介绍和 分析 ,发现 不同 的算法产生 的效 果也有 所差别。因此在 日后实 践应用 中,要根据具体 需求 ,合理选择算法 , 不 断提高捕获有 效性 。
全球导航卫星系统中的信号捕获与跟踪技术研究
全球导航卫星系统中的信号捕获与跟踪技术研究全球导航卫星系统(GNSS)是一种基于卫星的定位和导航系统,可以提供全球性的定位、导航和时间同步服务。
全球最主要的GNSS系统包括美国的全球定位系统(GPS)、俄罗斯的格洛纳斯系统(GLONASS)、欧洲的伽利略系统(Galileo)以及中国的北斗导航系统(BeiDou)。
这些系统的核心技术是信号捕获与跟踪技术,它们确保接收设备能够有效捕获和跟踪卫星发射的信号,从而实现定位和导航功能。
信号捕获是指在卫星信号到达接收设备之前,通过接收天线将信号采集到接收机中。
GNSS卫星发射的信号是微弱的,同时还存在多路传播等环境干扰因素,因此信号捕获技术需要具备高灵敏度和抗干扰的能力。
常用的信号捕获技术有频率捕获和码捕获。
频率捕获通过多个频率,找到卫星信号的频率,并将接收设备的本地振荡器频率锁定到卫星信号的频率上。
这种方法在频率稳定性要求高的情况下非常有效,但需要较长时间来完整的频率范围。
码捕获是通过卫星信号的码片序列,找到与之匹配的码片序列,并确定在码片序列中的位置。
这种方法速度相对较快,但对接收设备的频率稳定性和初值的要求相对较高。
信号捕获之后,接收设备需要进行信号跟踪,以保持对卫星信号的稳定跟踪,实现定位和导航功能。
信号跟踪的关键是解调卫星信号,并提取出导航信息,如伪距和航空数据。
信号跟踪技术中常用的方法是延迟锁定环(DLL)和相位跟踪环(PLL)。
DLL用于解调伪距信息,它通过比较接收到的卫星信号与自身产生的码片序列的差异,并不断调整对码片序列的延迟,从而实现伪距测量。
PLL用于解调航空数据信息,它通过比较接收到的卫星信号与自身产生的航空数据序列的相位差异,并不断调整对相位的锁定,从而实现航空数据解调。
除了常规的信号捕获与跟踪技术,还有一些改进和创新的研究方向。
例如,自适应波束形成技术可以通过调整接收天线的辐射模式来提高信号捕获和跟踪的性能;盲解调技术可以在没有先验信息的情况下对卫星信号进行解调,从而简化信号捕获和跟踪过程;多普勒补偿技术可以有效抑制多普勒频移带来的性能降低;最优滤波技术可以通过优化滤波器参数来提高信号跟踪的性能。
GPS卫星数字中频信号的捕获、跟踪研究与仿真的开题报告
GPS卫星数字中频信号的捕获、跟踪研究与仿真的开题报告题目:GPS卫星数字中频信号的捕获、跟踪研究与仿真的开题报告一、选题背景及研究意义GPS(全球定位系统)是一种全球性的卫星导航系统,可以提供位置、速度、时间等信息。
GPS信号在卫星发射后会经过大气层的影响,导致信号存在扩散、延迟等现象,难以在实际应用中进行精确的定位和导航。
因此,需要对GPS信号进行捕获和跟踪,以提高其定位和导航的精度和可靠性。
本研究将针对GPS卫星数字中频信号(navigation data message)进行捕获和跟踪研究,旨在探究GPS信号捕获和跟踪的机理,并通过仿真验证该算法的可行性。
二、研究内容1. 对GPS卫星数字中频信号进行理论分析和仿真验证,研究其信号特性和基本环节,探究其捕获和跟踪机理。
2. 采用软件实现GPS信号的捕获和跟踪算法,并通过实验验证算法的可行性。
其中,包括信号的初步处理、捕获和跟踪等环节。
3. 研究GPS信号的抗干扰能力,并对算法进行改进和优化,提高GPS信号的捕获和跟踪精度。
三、研究方法及技术路线1. 系统学习GPS信号的原理和特性,建立数学模型。
2. 设计GPS信号的捕获和跟踪算法,并进行系统仿真。
3. 基于软件实现算法,并进行验证。
在实验中采用GNSS信号模拟器,模拟GPS信号传输过程,并观察算法的捕获和跟踪效果。
4. 对算法进行改进和优化,加强GPS信号的抗干扰能力。
四、研究进度及计划安排1. 第一阶段(已完成):a. 系统学习GPS信号的原理和特性,深入了解GPS信号的捕获和跟踪机理。
b. 建立GPS信号仿真模型,并对数字中频信号进行分析和仿真。
2. 第二阶段(进行中):a. 设计GPS信号的捕获和跟踪算法,并进行初步测试。
b. 对算法进行改进和优化,提高其抗干扰能力。
3. 第三阶段(待完成):a. 基于软件实现算法,并进行系统验证。
b. 对测试结果进行分析和总结,撰写论文。
五、参考文献[1] K. Borre, D. M. Akos, N. Bertelsen, et al. A software-defined GPS and Galileo receiver: a single frequency approach[M]. Boston: Birkhuser, 2007.[2] G. Hein, M. Schwope, J. Kurth, et al. GPS and Galileo: dual RF front-end receiver and advanced digitization[M]. New York: Springer, 2009.[3] S. Wallner-Heavy, C. F. Mecklenbruker. The role of signal processing in the Galileo navigation system[J]. IEEE Journal of Selected Topics in Signal Processing, 2009, 3(4): 725-742.[4] P. Misra, P. Enge. Global positioning system: signals, measurements, and performance[M]. Lincoln: Ganga-Jamuna, 2001.。
GPS信号的捕获与跟踪
电子工程学院141GPS信号的捕获与跟踪第七章 GPS信号的捕获与跟踪前几章讲述了GPS系统结构和GPS定位原理,本章介绍GPS软件接收机和GPS信号处理方法,主要探讨对GPS信号进行捕获和跟踪的过程。
捕获的目的是搜索到可视卫星,并粗略地确定卫星信号的载波频率和伪码相位,跟踪的目的则是精确地跟踪信号的载波频率和伪码相位的变化,完成GPS信号解扩和解调,从而提取出导航电文、伪距观测量等。
7.1 GPS软件接收机目前广泛使用的GPS接收机一般均基于ASIC(Application Specific Integrated Circuit)结构,又称为硬件接收机,结构如图7-1所示。
硬件接收机的数字接收机通道(包括捕获、跟踪的相关运算)一般用一个或几个专用GPS信号通道处理芯片(ASIC)来实现,接收机微处理器从ASIC输出的相关输出结果译出导航数据,从而可以得到卫星星历及伪距,星历可用来得到卫星位置,并最终可由卫星位置及伪距解算出用户位置等信息。
这类ASIC芯片具有运行速度快、成本低的特点。
但由于ASIC限制了接收机的灵活性,用户不能轻易改变硬件接收机各类参数以适应随着GPS发展的升级需要;同时近年来出现了许多减少导航定位误差和提高抗干扰能力的算法,如抗多径跟踪环路设计、高动态的跟踪环路设计等,对于硬件接收机测试和使用新的算法,不便之处显而易见。
随着软件无线电思想的发展,GPS软件接收机的设计与实现逐渐成为研究热点。
图7-1 GPS传统硬件接收机框图软件无线电(Software Radio)的概念是由美国科学家J.Mitola于1992年5月在美国电信系统会议上首次明确提出的。
随着通信技术的迅速发展,新的通信体制与标准不断提出,通信产品的生存周期缩短,开发费用上升,导致以硬件为基础的传统通信体制无法适应这种新局面。
同时不同体制间互通的要求日趋强烈,而且随着通信业务的不断增长,无线频谱变得越来越拥挤,这对现有通信系统的频带利用率及抗干扰能力提出了更高的要求,但是沿着现有通信体制的发展,很难对频带重新规划。
微弱GPS信号的捕获与跟踪处理的研究与实现

学位论文作者签名: 日期: 年 月 日
上海交通大学硕士学位论文
第一章 绪论
第一章 绪论
1.1 引言
“导航的定义是使运载体或人员从一个地方到另一个地方的科学” 。在日常 生活中,我们每一个人都会进行某种形式的导航。而在一些情况下,我们需要更 精确的位置、预期的航向或到达期望目的地所需的时间。此时,便要使用所谓的 无线电导航装置。它利用多个已知位置的无线电装置的信号来确定某一点的位 置。 GPS(Global Positioning System,全球定位系统)[1][2]即为一种无线电导航系 统。它是美国在上世纪 70 年代开始研制的高精度的星基导航定位系统,能全天 候地向全球范围内具有适当接收设备的用户提供精确、 连续的三位位置和速度信 息,并具有良好的抗干扰性和保密性。 GPS 系统由卫星星座、 地面控制/监测网络和用户接收设备组成。 标称的 GPS 卫星星座 24 颗卫星组成,均匀分布在 6 个轨道平面上。分布在世界各地的地面 控制/监视网时刻监视着卫星的健康与状态,并对 GPS 卫星提供实时的检测、指 挥和控制。其主要由主控站、L 波段检测站和 S 波段地面天线组成。用户接收设 备,即 GPS 信号接收机,用来处理 GPS 信号,并能解算出用户所需的导航信息。 GPS 系统提供了标准定位服务(SPS) 和精密定位服务(PPS) 两种不同的服务。 其中前者提供给民用,而后者主要由美国军方使用。SPS 对全世界的所有用户均 是免费可用的, 而且在 2000 年 1 月, 美国政府取消了 SPS 服务的选择可用性(SA) 政策,使得 SPS 的定位精度大为提高。目前这种服务提供的预测精度为:在水 平面内,优于 13m(95%); 在垂直平面内, 22m(95%) 以内( U.S. Department of Defense, Standard Positioning System Performance Specification, Oct 2001)[1]。随 着大规模集成电路技术飞速发展,基于 GPS 系统的导航设备运用越来越广泛, 在民用导航领域一枝独秀,并拥有着非常广阔的发展前景。s designed. A piece of development board called DE2 with FPGA chip produced by Altera is used. This circuit can realize the conventional acquisition algorithm and it also has nice real-time performance. This realized module lays solid foundation of subsequent work and provides an important module. The emphasis of this thesis is weak GPS signal tracking. All algorithms in this thesis are based on Kalman filtering theory. And different Kalman filter models are used to replace the traditional tracking loops including PLL and DLL to obtain higher sensitivity and precision. This thesis proposes two kind algorithms. First, a square-root filter with Potter algorithm is implemented to alleviate round-off errors. And square process is called after accumulation to remove the unknown navigation bit. At last this algorithm introduces incoherent integration to strengthen the signal and restrain the noise effectively. The second algorithm uses another form of square-root Kalman filter, and improves the filter model with a dual Kalman filter, which reduces computational cost with high efficiency. This algorithm introduces Beyesian estimation theory to deal with the navigation bit of every accumulation period. This thesis uses a kind of software to generate GPS IF signals to make simulations. And the simulation results indicates that the first algorithm can track signals as weak as 17dB-Hz but the precision is not ideal and it costs a little more time. The second algorithm can track signal as weak as 19dB-Hz. And its
GPS信号捕获算法的研究

GPS信号捕获算法的研究全球导航卫星系统(GNSS)作为一种重要的定位技术,广泛应用于各个领域,如汽车导航、无人机导航、船舶导航等。
但是,由于 GPS 信号在空间传输过程中会受到多种干扰和衰减,因此接收机需要具备强大的信号捕获算法。
本文将介绍 GPS 信号捕获算法的研究。
一、 GPS 信号的捕获GPS 信号捕获是指接收机在接收到 GPS 信号前,需要搜索是否存在某个卫星的信号,并在搜索到信号后,对其进行跟踪。
GPS 信号捕获过程包括三个主要的步骤:初步搜索、细搜索和码捕获。
1. 初步搜索初步搜索是指在搜索到信号的卫星之前,接收机需要搜索整个码相位空间,以确定是否存在一个信号。
在初步搜索中,接收机需要依次搜索所有可能的卫星并计算与之相关的码延时。
由于 GPS 信号的码相位空间非常大,因此初步搜索时间较长。
2. 细搜索细搜索是指一旦确定存在一个卫星的信号,接收机需要在该卫星的码相位空间上进行细致的搜索,以确定其码偏移。
与初步搜索不同的是,细搜索中接收机只需对码相位空间中的一小部分进行搜索,以加快搜索速度。
3. 码捕获码捕获是指接收机在确定卫星信号的码偏移后,对码进行捕获,并进入跟踪模式。
在码捕获中,接收机对接收到的信号进行解调,以分离出来自于卫星的码信号,并与接收机本地生成的码进行匹配以进行跟踪。
二、 GPS 信号捕获算法的研究为了提高 GPS 信号的捕获速度和准确性,许多学者进行了广泛的研究。
这些研究主要围绕以下三个方面展开。
1. 初步搜索算法初步搜索算法是 GPS 信号捕获中最耗时的环节。
为了加快初步搜索速度,常用的方法包括并行搜索、局部搜索和二进制搜索。
并行搜索是指将搜索任务分拆成多个子任务并在多个通道上同时执行,以缩短搜索时间。
局部搜索是指在初步搜索过程中,在预先确定的窗口范围内进行搜索,以加快搜索速度。
二进制搜索是指将搜索空间等分为两个部分并依次执行,以减小搜索时间。
2. 细搜索算法细搜索算法的目标是尽可能缩短搜索时间并降低搜索误差。
基于MATLAB的GPS软件接收机捕获与跟踪算法实现

基于MATLAB的GPS软件接收机捕获与跟踪算法实现第l5卷第4期中国惯性技术学报2007年8月JournalofChineseIneaialTechnology文章编号:1005—6734(2007)04—0423—04VO1.15NO.4Aug.2007基于MA TLAB的GPS软件接收机捕获与跟踪算法实现陈熙源,张昆鹏(东南大学仪器科学与工程学院,南京210096)摘要:研究了GPS软件接收机的捕获和跟踪算法,并基于Matlab软件平台和射频前端在Pc 上实现了GPS软件接收机样机.介绍了GPS软件接收机的结构和数据采集硬件,讨论了GPSC/A码的特性,产生原理以及捕获过程.针对传统的串行搜索算法慢的缺点以及高动态GPS软件接收机的特点,在该样机中实现了快速的基于循环卷积的并行捕获算法,并联合使用超前滞后环和对相位反转不敏感的科斯塔斯锁相环分别对码相位和多普勒频偏进行跟踪,解调得到导航电文.仿真和测试结果表明,使用GPS软件接收机进行信号处理的思想使用户在算法处理和软件升级等方面具有更大的灵活性,可应用于下一代任何全球导航卫星定位系统(GNSS)和空基增强系统(SBAS)接收机的设计.关键词:GPS软件接收机;仿真;捕获;跟踪中图分类号:U666.1文献标识码:A RealizationofacquisitionandtrackingalgorithmsforGPSsoftwarereceiverbasedonMA TLABCHENXi—yuan,ZHANGKun—peng (SchoolofInstrumentScienceandEngineering,SoutheastUniversity,Nanjing210096,China) Abstract:AcquisitionandtrackingalgorithmsforGPSsoftwarereceiverwerestudied.AprototypeofGP Ssoftware receiverthatrunsonPCWasdevelopedbasedonMatlabplatformandRFfront—end.ThestructureofGP Ssoftwarereceiverandthedatacollectionhardwarewerepresented.Theprope~iesandgenerationprincipleandacq uisitionprocessoftheGPSC/Acodewerediscussed.Sincetheconventionalserialsearchingalgorithmisslowan dconsideringthedemandofhighdynamicGPSsoftwarereceiver,afastparalleltrackingalgorithmbasedoncyclicconvolutionWasimplementedinthesamplereceiver,andearly-latercodetrackingloopandCostasphas elockloopwereusedtotrackcodephaseandDopplerfrequencyshift,respectively.Sothenavigationdatacouldbede modulated. SimulationsandexperimentsshowthattheideasofsignalprocessingusingGPSsoftwarereceiverprovid emoreflexibleinalgorithmsprocessingandsoftwareupdatingforusers,andCanbeappliedtothenextgeneratio nGlobal NavigationSatelliteSystemandSpaceBasedAugmentationSystemreceiversdesign.Keywords:GPSsoftwarereceiver;simulation;acquisition;tracking美国GPS的现代化,俄罗斯GLONASS的复兴,欧洲伽利略系统的出现和我国”北斗二代”的成熟,即将带来下一代全球导航卫星定位系统.设计能灵活充分利用所有导航卫星信号的下一代GNSS接收机是一项具有挑战性的工程【”.目前GPS接收机由射频前端,用于信号处理的ASIC和进行位置解算的CPU组成【.软件可以下载~EJCPU中改变接收机的性能参数,然而预先设计的跟踪通道,相关器和控制环路参数已固化~OASIC中,限制其灵活性.而GNSS软件接收机是下一代GNSS接收机设计的最佳方案.GNSS软件接收机通过软件实现其信号捕获和跟踪处理而不是硬件【.各GNSS虽然不同,但都是基于信号处理而进行需要的操作.本文把GPS软件接收机作为一个例子实现,其思想可以应用于任何GNSS软件接收机的设计.收稿日期:2006-04-05;修回日期:2007~06—18基金项目:教育部新世纪人才支持计划(NCET-06.0462);船舶支撑技术基金项目(6922001029) 作者简介:陈熙源(1969一)男,副教授,博士生导师,主要从事软件接收机,组合导航,惯性元器件标定及误差建模,非线性滤波,信息融合及光纤传感测量等方面的研究.E-mail:****************.ca424中国惯性技术学报2007年8月1GPS软件接收机GPS软件接收机在最前端使用ADC把GPS信号转化成数字信号,换句话说,在尽可能靠近天线的部分数字化输入信号【.如图l天线接收从GPS卫星传送的信号,前端把输入信号放大到合适的幅度,并把射频转换到合适的频率,ADC数字化输入信号.天线,射频前端和ADC构成GPS软件接收机中的硬件部分【.硬盘可以存储数据进行事后处理,也可使用模拟器的数据.信号量化以后,用软件对其进行处理.捕获就是找出可见卫星的信号,跟踪是更精确地得到信号的相位并检测出导航数据的相位变化,从而获得子帧和导航数据,得到卫星电文和伪距【最终,解算出位置,速度和时间.本文中,把GPS信号从1575.42MHz下变频~xJ2o.49MHz,以l6.37MHz的速率采样,得到4.12MHz的数字中频信号.目前我们研发的重点在基带信号处理部分,使用北京东方联星公司的中频信号采样器作为硬件部分.采样器输出信号可用于实时处理或保存到硬盘进行事后处理.图1GPS软件接收机组成结构Fig.1ArchitectureofGPSsoftwarereceiver2GPSC/A码的捕获预先产生存储于内存的本地C/A码和载波复现信号,在信号捕获和跟踪中反复使用.2.1GPSC/A码的特性和产生将来GPS的信号结构可能会改变,不过目前GPS卫星主要传送频率分别为1575.42MHz和1227.60MHz的Ll和L2两路载波信号.Ll频段包括C/A和P(Y)码,L2频段只包括P(Y)码.Ll频段的C/A~P(Y)码的载波是正交的,表达式如下【6】:SL1=4P(t)D(t)cos(2nff+)+C(t)D(t)sin(2nft+0)(1)】即为Ll频段的信号,4是P码的幅度,P(t)+-1是P码的相位,D(t)=±l表示卫星数据,是Ll 频段的频率,是初始相位,是C/A码的幅度,C(f)=±l表示C/A码的相位.本文仅研究Ll频段的C/A码捕获和导航数据解调.C/A码是码速率为1,023MHz的二进制调相信号(BPSK),每个码元约977.5括1023个码元,所以其周期为1ms,每毫秒重复出现.为了找到c,A码的起始码元只需要很少的数据,比如1ms.如果没有多普勒效应,1ms的数据包括1023个码元.处理30s的数据可以得到卫星电文的头三帧,那么接收机最少得~lJ30s的数据才可首次解算出用户的位置.GPSC/A码属于伪随机码(PRN)【,不同的卫星使用不同的C/A码.如图2C/A是两组1023位的PRN序YlJG1,G2相乘得到的.C/A码最主要的特性是它们的相关性.高的自相关值和低的互相关值为信号捕获提供了大的动态域.自相关最大值1023,等于C/A码的长度,其他自相关值为63,~1,一65.互相关也有三个值,63,一1和一65【oJ.图2C鹕的产生原理Fig.2GenerationprincipleofC/Acode2.2GPSC/A码的捕获采用捕获算法判断可见卫星并检测其码相位和载波频率.相对于传统的串行捕获算法,本文使用快速的基于循环卷积的并行码捕获算法【.长度为Ⅳ的有限序ylJx(n)的离散傅立叶变换是:Ⅳ一】()=∑x(n)e-j2Ⅳ(2)n=O两个长度为Ⅳ的有限序y~Jx(n)和月)的互相关函数是:Ⅳ一1z()=∑()+)(3)m=O在(3)中已忽略了一个因子.联立(2)和(3)得到和互相关序列的离散傅立叶变换:Ⅳ卅n一+/L∑Ⅳe,/L¨∑删=Ⅳ吖+/L,/L∑∑Il,七/LZ第4期陈熙源等:基于MA TLAB的GPS软件接收机捕获与跟踪算法实现425=X’()y)(4)+表示复数共轭丽由式(4)看出,xfffly~f.相关序列的离散傅立叶变换可由频域的减y与另一个的共轭相乘得到.从而时域的互相关函数可以由乘积的傅立叶反变换得到.如上并行码搜索捕获算法对输入信号和本地码信号进行了循环相关,然而它并没有在所有可能的载频范围搜索,故循环卷积需要在所有可能的载频范围进图3并行码捕获算法Fig.3Parallelcodeacquisitionalgorithm行搜索.在高动态下考虑到多普勒效应后的频偏为±lOkI-Iz.出于频率误差和计算量的考虑,搜索步长设为500Hz,则最大的频率误差为+_250Hz.载波跟踪环的初始带宽要满足这一点.串行捕获算法一般以l或1/2个码元进行捕获.而并行码捕获算法采样速率更高,这儿以16MHz的速率采样,即可提供约1/16个码元的精度,其精度相对高得多.采用并行码捕获算法得到的结果如图4,左图为本算法搜索到第5颗卫星当前不可见,右图为搜索到第6颗卫星当前可见,并得出其码相位和多普勒频偏.3GPS信号的跟踪捕获到信号后,为了得到第5颗星第6颗星.一..一...,?:图4并行码捕获算法得到的结果Fig.4Theresultsobtainedbyparallelcodeacquisitionalgorithm导航数据,需要对其进行跟踪.跟踪环路使用捕获得到的码相位和多普勒频偏进行.本文联合使用超前滞后环和科斯塔斯锁相环对码相位和多普勒频偏进行跟踪,其框图如图5所示.3.1码跟踪环码跟踪环中,本地产生的超前,当前和滞后三路信号与去除了载波的输入信号进行相关.为了增加码环跟踪的可靠性,同时在I和Q路进行跟踪.六路相关器输出的结果同时送入码鉴别器,得到合适的码相位后,调整码生成器的相位.选择归一化的超前减去滞后功率鉴别器,公式如下【.】:.=12222㈦(+Q)+(+Q)如果D>0.1,本地C/A码向右移动;如果一0.1,本地C/A码向左移动.码环跟踪结果如图6所示.I路中超前滞后相关值基本相等,当前相关值最大.3.2载波跟踪由于GPS信号中导航数据相位反转,本文选择对相位反转不敏感的科斯塔斯锁相环进行载频跟踪.基于反正切鉴别器的高精度和对相位反转不敏感的特性,选择其作为载波环路鉴别器.公式如下【.】:图5码与载波跟踪环Fig.5Codeandcarriertrackingloopl路输出0501001502130时间/ms图6超前滞后码环跟踪结果Fig.6Trackingresultswithearly—latecodeloop巨l86420426中国惯性技术学报2007年8月=arctan(Qp/Ip)(6)使用两阶的载波环路滤波器跟踪多普勒频率的变化,每毫秒调整一次,使之接近输入信号的中频.滤波器函数如下【】:+(7)G=18(丽co,,T(8)L1一~————————————————————6JJi}d4+4+()’G:—1.::4+丁+(7)一2p工’1.)4式中,为压控振荡器增益,kd为鉴别器增益,是带宽,是阻尼系数,积分时间.载波跟踪环得到的多普勒频率如图7,载波跟踪环当前I路输出的结果如图8,此即为跟踪环路得到的解调数据,每毫秒输出一次.300020001000.1000.2000.3O00(9)科斯塔斯环路载波跟踪时间/ms图7科斯塔斯环多普勒频偏跟踪结果Fig.7TrackingresultforDoppler-frequencyoffsetwit1lCostasloop跟踪环路输出几1jIflIO2004O08008001000时间/ms图8跟踪环路解调出的导航电文Fig.8Navigationdatademodulatedbytrackingloop4结论本文基于PC和中频信号采样器研究了GPS软件接收机的信号捕获和跟踪算法,分析了FFT 捕获方法,超前滞后码和科斯塔斯载波跟踪环路,实现了GPS软件接收机样机.使用软件接收机进行GPS信号处理的思想可以用于任何GNSS接收机的设计.将来的工作是开发能兼容GPS和伽利略等系统的实时的GNSS接收机.参考文献(Reference):【1】JamesBao-yenTsui.Fundamentalsofglobalpositioningsystemreceivers:asoftwareapproach[M].New Y ork:JohnWiley&SonsInc.,2000.【2】尹燕,赵明生,蔡凡.数字直扩接收机中同步环路设计与仿真[J】.计算机仿真,2006,23(11):325—331.YINY an,ZHAOMing-sheng,CAIFan.TrackingloopdesignandsimulationfordigitalDSSSreceivers[ J].ComputerSimulation,2006(11):325—331.[3】3SchweikertR,WOrzT,DeGaudenzi,eta1.OnsignalstructuresforGNSS-2【J】.InternationalJournalofSatelliteCommunications,2000,18(Issue4-5):271—291.【4】李士兵,王美玲,刘彤.基于GP4020的GPS接收机软件设计[J】.中国惯性技术学报,2006,l4(4):35—38.LIShi.bing,WANGMei-ling,LIUTong.DesignofsoftwareofGPSreceiverbasedonGP4020[J].Journ alofChineseInertialTechnology,2006,l4(4):35—38.【5】SchmidAndr6Neubauer,EhmH,binedGalileo/GPSarchitectureforenhancedsensitivityrece ption[J].InternationalJournalofElectronicsandCommunications,2005,59:297—306.【6】LeyssensJ,MarkgrafM.Evaluationofacommercial-off-the-shelfdual-frequencyGPSreceiverforuseon LEOsatellites[C]//ProceedingsoflONGNSS.LongBeach,Cflifomi~USA,Sept.13—16,2005:1—11.【7】唐康华,吴美平,胡小平.基于射频前端的GPS软件接收机设计与验证【J1.中国惯性技术学报,2007,15(1):51—54.TANGKang-hua,wuMei-ping.HUXiao-ping.DesignandvalidationofGPSsoftwarereceiverbasedon RFfront’end[J].JournalofChineseInertialTechnology,2007,15(1):5卜54.【8】8PanyMoonSw,FtirlingerK,IrsiglerM,eta1.PerformanceassessmentofanundersamplingSWCreceive rforsimulatedhigh-bandwidthGPS/Galileosignalsandrealsignals[C]//ProcoftheI6IONGPS/GNSS.Portland,Ore gon,9-12September2003?103-116。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿日期: 1997211226第一作者 女 29岁 博士生 100083 北京1)国家重点科技攻关(9621302205202)资助项目GPS 信号捕获与跟踪策略确定及实现1)孙 礼 王银锋 何 川 张其善(北京航空航天大学电子工程系)摘 要 为了检测GPS(Global Positioning System)信号,设计了码环及载波环捕获与跟踪数字系统.序贯搜索与窄间隔超前2滞后型数字延迟锁相环的采用,保证了码相位的可靠捕获与精确跟踪,四相鉴频器、叉积自动频率跟踪算法及科思塔环载波相位跟踪算法的结合,既保证了载波频率(多普勒频移)的捕获速度,又使环路能有效地跟踪频率/相位变化,获得较好的动态性能与噪声性能.控制算法及参数确定的软化实现使系统具有较好的灵活性.基于扩频相关器与数字信号处理器的数字系统验证了上述方案的正确性及有效性.关键词 接收机;捕获;跟踪;全球定位系统分类号 TN 12;TN 915GPS 信号捕获与跟踪控制策略的确定与实现是GPS 接收机研制的核心.由于GPS 导航数据经过了直接序列扩频调制及载波调制,信号发射功率小,故必须首先对信号进行码相关解扩.由于接收机载体的动态性,多普勒频移不定,因此码捕获须在整个码相位及频域上以固定间隔进行二维搜索.信号解扩发生后,即采用/虚拟暂态0窄间隔超前2滞后型数字延迟锁相环对码相位进行精确跟踪.载波频率(多普勒频移)的粗略估计包含在GPS 码同步过程中,四相鉴频器进一步将多普勒频移牵引到载波跟踪的线性范围.载波跟踪主要采用科斯塔环相位跟踪与叉积自动频率相结合的跟踪算法,二者随载体动态以软件方式进行切换,以保证载波跟踪环的噪声性能与动态性能.最后利用科斯塔环软件算法解调出导航电文.1 GPS 信号捕获与跟踪数字系统接收机中信号捕获与跟踪数字系统软硬件接口如图1所示.硬件主要包括解扩相关器,完成本地载波和C/A 码的产生与混频、信号处理等功能;软件由码环算法、载波环算法及数据解调算法等组成,完成捕获与跟踪闭合控制及数据解调等功能.基于TM C/图1GPS 接收机中信号捕获与跟踪数字系统软硬件接口载波辅助S 320C31的软件算法解调数据载波环算法码环算法GPS 扩频相关器正交同相输入信号A 码发生器积分清除器积分清除器码数控振荡器载波数控振荡器积分清除器积分清除器1999年4月第25卷第2期北京航空航天大学学报Jour nal of Beijing University of Aeronaut ics and Astronaut ics April 1999Vol.25 No 122码捕获与跟踪环路C/A码捕获与跟踪环路的目的是使本地产生的复制C/A码与调制在卫星上的C/A码同步,以实现相关解扩与码相位精确跟踪.接收机产生的码相位和载波频率必须与接收到的卫星信号的码相位和载波频率相匹配,使得相关结果值(解扩)高于信号检测域值,完成码捕获,进而才能进行跟踪与解调.2.1码捕获环路闭合控制策略若接收机产生的码相位和载频与接收到的卫星信号的码相位和载波频率能匹配在误差允许的范围内且相关器内部采样速度足够快,可假定在第k次相关间隔上S(码相位延迟)、f d(多普勒频移)为常量(尽管未知),则I(同相)、Q(正交)通道积分2清除器在相关间隔末输出为[1,2]I(k)U0.5AD(k)R[E(k)]#sin c{[$f d(k)]#P T}cos<k+^n I(k)(1) Q(k)U0.5AD(k)R[E(k)]#sin c{[$f d(k)]#P T}sin<k+^n Q(k)(2)其中A为信号幅度;D(k)为调制数据;sin c (z)=sin z/z;$f d(k)为多普勒频移估计残差;E (k)为码相位估计偏差;R(#)为伪随机码(PRN 码)理想的二电平自相关函数,均为时间的函数; T为预检积分时间;<k=$f d(k)#t+<0为载波相位(时间函数);^n I(k),^n Q(k)为噪声项;I(k),Q (k)接近于相互独立的高斯随机变量.为简单起见,以k表示采样时刻.计算S2(k)=I2(k)+Q2 (k)可获得数字信号能量,利用它可检测并监视码环的捕获或跟踪状态.由(1)式和(2)式可知,I (k)、Q(k)的均值随相位误差和(或)多普勒频移估计误差的降低而增大.根据PRN码自相关函数特性,在PRN码的一个完整周期内,仅当E(k)<T c(一码片)时, R[E(k)]>0,有且只有一次相关峰值发生在E(k)=0即信号完全对准的情况下.假定信号检测域值为V t,搜索算法对V t,S(k)进行比较,则可确定信号是否被捕获.系统中采用时域/频域二维序贯搜索,控制逻辑以1ms为周期调整本地信号发生器的码相位与多普勒频移估计,使产生的信号对准某一搜索单元,若该信号与输入卫星信号对准在容许的范围内,S2(k)增大,超过检测阈值,并通过校验则信号捕获成功,搜索停止码跟踪启动;否则搜索单元步进重复上述过程,直到信号捕获为止.2.2码跟踪环路闭合控制策略码跟踪由可编程预检积分器、码环鉴相器与环路滤波器组成的超前2滞后型非相干数字延迟锁相环(DDLL)完成.码环鉴相器输入为载波同相、正交支路的码相位超前、滞后的相关信号,相关间隔为d码片(相位超前与滞后支路的相位间隔),假定d=2D,环路控制量B(k)可由(3)式获得:B(k)=S2e c(k)-S2l c(k)=I2e(k)+Q2e(k)-I2l(k)-Q2l(k)=0.25A2#sin c2{[$f d(k)]T#P}#{R2[E(k)-D]-R2[E(k)+D]}+^n1(k)(3)若不考虑噪声项^n1(k),当B(k)=0时,S2e(k) =S2l(k),则根据伪随机码相关特性,可推断E (k)=0,码相位达到精确同步;当B(k)X0时,码相位估计误差E(k)X0,/暂态0点相位偏移,控制算法应调整本地信号发生器使相位偏移减小.常规DDLL中环路通常包含超前、暂态、滞后3个支路,相关器以二倍码率运行,相关间隔为1码片.而本系统环路设计中采用了/虚拟暂态0(由软件实现),硬件开销节省了一个支路,而相关间隔由常规的1码片降低为0.5码片,有效地提高了C/ A码的跟踪精度.由于PRN码是调制在载波上的,并具有相同的基频,因此当载波同步发生时,多普勒频移可精确地估计获得,利用它进行一定的比例运算,可反馈辅助码环跟踪以削弱多普勒频移对码率的影响,使得环路参数的选择能尽量满足噪声性能的要求.3载波捕获与跟踪环路由于接收机载体的动态性,载波跟踪环设计必须考虑多普勒频移对载波频率的影响.对于一般接收机而言,载波捕获与跟踪常采用科斯塔环重构载波相位相干解调BPSK(二相相移键控)数据实现[3].相干系统对高斯噪声具有较好的性能,但对通信链路干扰的容忍能力较差,特别是受载体动态引入的多普勒频移影响较大.对于强机动环境的GPS接收机,为适应平台的动态性,科斯塔环必须具有相对宽的带宽,这意味着信噪比阈值性能即跟踪能力降低,此时相干解调不再适合.可取的方案是采用非相干解调,即环路自动跟踪频率而不是相位.对于相同动态,二阶频率锁定135第2期孙礼等:GPS信号捕获与跟踪策略确定及实现跟踪环(FLL)比三阶相位锁定环(PLL)具有几dB信噪比域值的动态性能优势[4],但其跟踪精度低,二者存在一定的矛盾.本系统的载波环设计中采用了适用载体动态的载波跟踪策略,即采用四相鉴频牵引进一步捕获多普勒频率、初始跟踪采用动态能力强的FLL消除动态、稳态跟踪采用热噪声误差小的PLL提高载波相位的基本方案,使得跟踪环能够同时满足动态性能与跟踪精度的要求,而环路参数的可编程设置以及动态变化时2种跟踪策略的软切换方式保证了跟踪的灵活性与稳健性.3.1科斯塔环载波相位跟踪科斯塔环是PLL的一种,由于它对载波调制数据不敏感而在GPS接收机中得到了普遍应用.常用的科斯塔环鉴相器算法为H k=Q(k)I(k)=0.125A2R2[E(k)]#sin c2{$f d(k)#P T}sin2<k+^n2(k)(4)若忽略噪声项^n2(k),输出信号与sin2<k成正比.由(4)式可知鉴相器输出信号与码延时误差及多普勒频移估计误差有关.由于接收机采用独立的码跟踪环与载波跟踪环,载波环闭合在码环相关发生之后,因此码相位已对准在容许的范围内,对载波跟踪影响不大.多普勒频移估计误差处在多普勒搜索单元范围内,有可能较大,此时科斯塔环的鉴相函数幅度衰减,鉴相特性受到影响,直接捕获或跟踪相位是比较困难的,应考虑将频率估计误差牵引到可接受的范围内.科斯塔环与一般的PLL一样对动态性敏感,但能产生最精确的伪距变化率观测量.对于给定的信号功率,科斯塔环也提供比FLL误比特率低的数据解调.因此,科斯塔环预期应用于GPS接收机载波跟踪环的稳态跟踪模式.3.2叉积自动频率跟踪频率跟踪实质上是载波相位差分跟踪.大多数情况下,频率跟踪鉴相器测量载波相位在固定时间间隔内的变化量.FLL通过载波DCO产生适当的频率以解调信号载波,因此对同相、正交信号相位的180b反转不敏感.在信号初始捕获时,实现频率锁定比实现相位锁定容易.常用的FLL 鉴频器算法有(考虑单位时间间隔)叉积自动频率跟踪算法(CDAFC)[5]:$f k=I(k-1)Q(k)-I(k)Q(k-1)=A2D(k)D(k-1)R2[E(k)]#sin c2($f d#P T)#sin(<k-<k-1)+^n3(k)(5)假定连续采样输出数据的数据位不变,即有D(k)D(k-1)=1$f d=$f d(k)-$f d(k-1)连续采样相位变化为<k-<k-1=[$f d(k)-$f d(k-1)]T=$f d T当|$f d#P T|n P/2时,sin c2($f d#P T)y1sin(<k-<k-1)U<k-<k-1输出与单位时间间隔内相位变化成正比,可以用此输出量控制载波DCO调整频率产生,达到频率跟踪的目的.该算法要求在同一数据位内计算,在信噪比较低的条件下仍能取得较好的性能.由式(5)可知,叉积鉴频器CD AFC信号输出幅度与R2[E(k)]及sin c2[$f d(k)P T]成正比,由于载波捕获与跟踪是在码相关发生后,码相位误差已校准在可容许的范围内,可忽略不计.而信号捕获过程多普勒频率搜索单元宽度为500Hz,这时残留的估计频率偏差仍然很大,将对鉴相器的输出信号产生衰减;另一方面,当频率估计残留偏差过大时,鉴频器可能超出其线性工作范围,使得鉴频器无法正常工作.因此,载波FLL必须采用2个过程,即首先采用四相鉴频器将频率从几百Hz牵引到几十或几H z,然后再利用CDAFC 作进一步的频率捕获与跟踪.3.3四相鉴频器四相鉴频器的主要目的是将频率进一步牵引到CDAFC的跟踪频带的线性范围内,其较正量通过比较2个连续时序同相、正交信号分量获得,计算同一时刻同相、正交分量绝对值之差为|I(k)|-|Q(k)|=A#R[E(k)]#|sin c($f d(k)P T)|#{|cos<k|-|sin<k|}(6)由于载波跟踪时码相估计误差对准在1个码片范围内,R[E(k)]>0,|I(k)|-|Q(k)|的符号与G=|cos<k|-|sin<k|的符号相同,可将载波相位(频率)误差分割为4个区间,设校正量为B,则有B=sgn[I(k)]#$Q|I(k)|\|Q(k)|(7)B=-sgn[Q(k)]#$I|I(k)|<|Q(k)|(8)其中$I=I(k)-I(k-1)136北京航空航天大学学报1999年$Q =Q (k)-Q (k -1)3.4 载波环监控与数据解调载波跟踪环路锁定监控利用连续的相关器输出采样值点积进行判决,即E (k)=I (k)I (k -1)+Q(k)Q(k -1)(9)当相关未发生、环路未锁定时,该项噪声趋于零,一旦环路锁定,则E (k)突然增加,叉积Q(k)I (k -1)-I (k)Q(k -1)y 0此时点积可用来估算信号功率.为避免数据位边沿跳变,通常采用多次采样数据平滑,以使边沿单次跳变对锁定监控的信号功率估算不产生影响.对于PLL 相干解调,科斯塔环可直接解调卫星数据信息,而对于非相干FLL 解调,数据解调则由软件实现的载波相位误差校正获得,即对载波相位误差H k 旋转得I c =I (k)#cos H k +Q (k)#sin H k Q c =Q (k)#cos H k -I (k)#sin H k(10)I c 即给出当前数据位表达.4 结束语本文对GPS 接收机中信号捕获与跟踪策略进行了分析,设计了信号捕获与跟踪码环及载波环.基于GPS 射频前端、扩频相关器与TMS320C31处理器的GPS 接收机数字系统验证了上述方案的正确性.控制量的提取及算法的实现由软硬件共同完成,具有较好的灵活性与抗干扰能力.参 考 文 献1 朱近康.扩展频谱通信及其应用.合肥:中国科学技术大学出版社,1993.182~2042 Zhuang W.Modeling and analysi s for the GPS pseudo 2range ob 2servable.IEEE Tran on AES,1995,31(2):739~7513 Zhuang W,Tranquilla J.Performance analysis of GPS carrier phase observable.IEEE Tran on AES,1996,32(2):754~7674 Jaffe C R.Software i mplem entation of a PN spread spectrum re 2ceiver to accommodate dynamics.IEEE Tran on Com,1977,25(8):832~8395 Francis D N.AFC tracking algorithms.IEEE Tran on Com,1984,32(8):935~947Control Strate gy a nd Implementation for Acquiringand Tracking GPS SignalSun Li Wang Yinfeng H e Chuan Zhang Qishan(Beijing University of Aeronautics and Astronautics,Dept.of Electronic Engineering)A bstract A control strategy of acquisition and tracking for code loop and carrier loop is designed to detect GPS signal.Sequential searching scheme and narrow space non 2coherent digital delay locked loop as 2sure reliable acquisition and precise tracking for code phase.Integrated algorithms of 42quadrant frequency,cross 2product automatic frequency control and Costa phase locked loop are adopted to speed up frequency ac 2quisition and effectively track carrier frequency/phase changing,and therefore obtain better dynamic and noise performance.The control algorithms and loop parameters determination are implemented by software with inflexibility.Digital system based on spread spectrum correlator and digital signal processor proved above scheme be correct and efficient.Key words receivers;acquisition;tracking;global positioning system137第2期 孙 礼等:GPS 信号捕获与跟踪策略确定及实现。