MSP430单片机_步进电机与直流电机控制设计
用MSP430F149单片机实现步进电机通用控制器
霪 娶毋 r 蕈
- 0 0
0妻 嚣 j
关键词 :M S
单片机 ;步进 电机 ; 通用控制器
0 il l ≮
一I 嚣露 零 l。 l l 譬≯ l
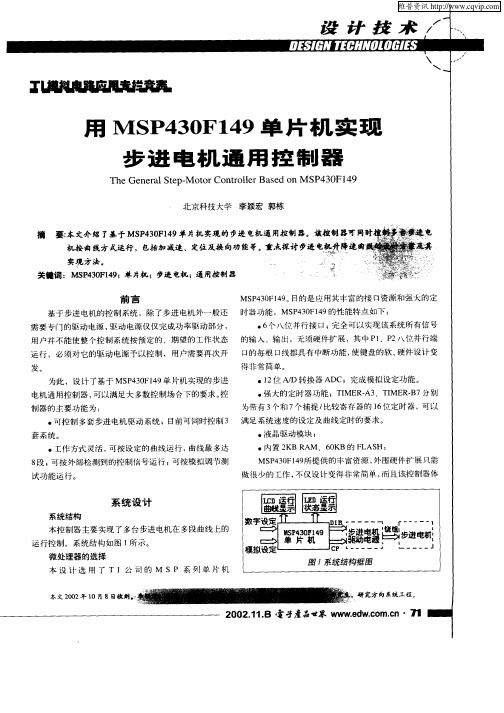
系 统 设 计
系统 结构 本控 制 器 主要 实 现 了 多台 步进 电机 在 多段 曲线 上 的
\
\
,
技 术
,
i
一 一
f 放大的起动过程
运行曲线
…
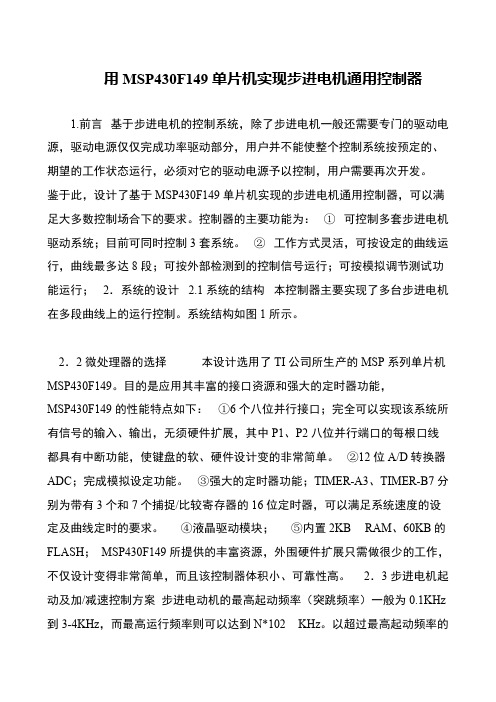
用 机实现 单片 步进电 加/速控制, 际上 机的 减 实 就是
控制 发脉 冲的频 率 , 升速 时 , 使脉 冲频 率 增高 , 速时 相 减
反。 如果 使 用定 时 中断 来 控制 电机 的速 度 , 加减 速控 制 就
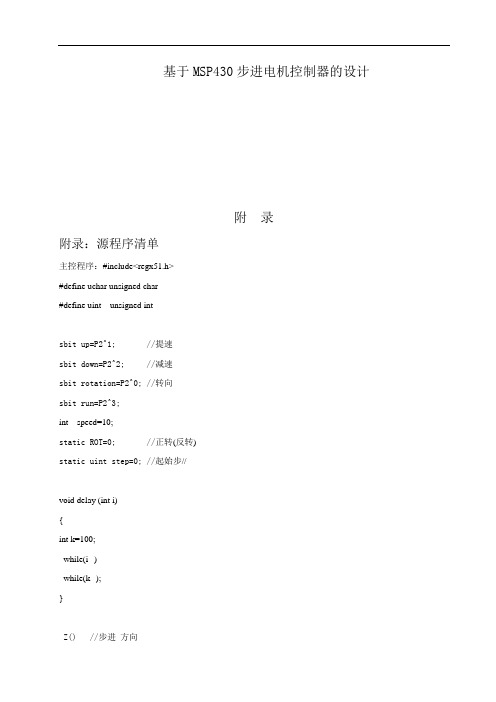
图4连续 模式的定 时间隔输 出
积小 、可 靠 性 高 。
一般不小于 5 s、脉冲序列的均匀度及高低电平方式 。 g)
7r甘 . 击 ] th : ‘ 吉 S , r 士 r , 企 I L 壬 7 7 陂 、 击 士
向一升 速 三 个过 程 。
步进 电机起动及加 / 减速控制方案
‘
…
脉
U
t l e .
r -
算是在定时中断外实现的, 并不 占用中断时间 , 保证电机
u
前D 硝 勺 I 最  ̄ c t; -P  ̄, .
-
后 /
\ D勺 -硝i 下- ̄  ̄t I第 c. P,
此时D l 向 II 换
的高速运行。
②证制度精性要一速准达 保控速的确;从个度确到
方 向 DR I
步 进 电 动 机 的 最 高 起 动 频 率 ( 跳 频 率 ) 般 为 突 一
基于MSP430单片机的直流电机PWM调速系统的研究
基于MSP430单片机的直流电机PWM调速系统的研究一、本文概述随着微控制器技术的快速发展,其在各种控制系统中的应用也日益广泛。
MSP430单片机作为一种低功耗、高性能的微控制器,被广泛应用于各种嵌入式系统和智能设备中。
其中,直流电机PWM调速系统就是MSP430单片机的一个重要应用领域。
本文旨在研究基于MSP430单片机的直流电机PWM调速系统。
我们将介绍MSP430单片机的基本特性及其在直流电机控制中的优势。
然后,我们将详细分析PWM(脉冲宽度调制)调速系统的基本原理和优点,以及如何在MSP430单片机上实现PWM控制。
接下来,我们将通过硬件设计和软件编程,构建一个基于MSP430单片机的直流电机PWM调速系统,并对其性能进行实验验证。
我们还将讨论该系统在实际应用中的潜力和可能面临的挑战,如噪声干扰、电机保护、系统稳定性等问题,并提出相应的解决方案。
我们将总结本文的主要研究成果,并展望未来的研究方向和应用前景。
通过本文的研究,我们希望能够为MSP430单片机在直流电机PWM 调速系统中的应用提供理论和实践指导,推动相关技术的发展和应用。
二、MSP430单片机概述MSP430单片机是德州仪器(Texas Instruments,简称TI)推出的一款低功耗、高性能的微控制器。
其独特的设计理念和广泛的应用场景,使得MSP430单片机在众多嵌入式系统中占有一席之地。
MSP430单片机以其超低的功耗、丰富的外设资源、高效的指令集以及灵活的编程方式,被广泛应用于各种低功耗、实时性要求高的嵌入式系统中。
MSP430单片机具有多种型号,涵盖了不同的性能和功能需求。
其核心采用精简指令集(RISC)架构,使得指令执行速度更快,效率更高。
MSP430单片机还具有丰富的外设接口,如串行通信接口(UART)、SPI、I2C等,方便与外部设备进行通信。
在直流电机PWM调速系统中,MSP430单片机扮演着关键角色。
通过编程控制PWM波的占空比,MSP430单片机可以实现对直流电机的精确调速。
基于MSP430单片机的步进电机控制器的设计与实现

unsigned char change_rate_flag = 0; // Flag indicating rate change
unsigned int max_rate = MAX_RATE; // Maximum stepping rate
static const unsigned char CcwHalfStepB[] =
{
0x01, // 001 1
0x01, // 001 2
0x01, // 001 3
0x06, // 110 4
0x00, // 000 5
0x00, // 000 6
0x01
};
// 半步状态表B
static const unsigned char fullStepB[] =
{
0x01,
0x00,
0x00,
0x01
};
// 半步状态表A
static const unsigned char HalfStepA[] =
{
0x01, // 001 1
void toggle_direction(void);
//定义串口操作变量
char nRev_UART0; // 串口 0 的接收标志
char UART0_TX_BUF[10]; // 串口 0 的发送缓冲区
char UART1_RX_Temp[10];
char UART0_RX_BUF[10]; // 串口 0 的接收缓冲区
0x00, // 000 7
0x07 // 111 8
基于MSP430单片机的步进电机控制系统设计

基于MSP430单片机的步进电机控制系统设计步进电机是一种电动机,能够将电脉冲信号转换为机械转动。
它具有结构简单、运行平稳、响应速度快、定位精度高等特点,广泛应用于各种机械设备中。
本文主要介绍基于MSP430单片机的步进电机控制系统的设计。
1.系统硬件设计步进电机控制系统的硬件设计需要包括MSP430单片机、步进电机、电源以及其他辅助电路。
1.1MSP430单片机MSP430系列是由德州仪器公司推出的一款低功耗、高性能的16位单片机。
它具有低功耗、高计算性能、丰富的接口资源等特点,非常适合用于步进电机控制系统。
1.2步进电机步进电机是由转子、定子、绕组和传感器组成,可以完成定距离的转动。
根据具体需求,可以选择不同类型的步进电机,如单相、双相、两相、三相等。
1.3电源步进电机控制系统需要提供稳定的电源供电。
可以采用直流电源或者交流电源,具体电压和电流根据步进电机的额定参数确定。
1.4辅助电路辅助电路包括电机驱动电路、电流控制电路、保护电路等。
电机驱动电路可以选择使用驱动芯片,如L293D芯片,来驱动步进电机。
电流控制电路用于控制步进电机的电流大小,保护电路用于保护步进电机不受过电流、过压等问题的影响。
2.系统软件设计步进电机控制系统的软件设计需要编写相应的程序代码,并通过MSP430单片机来控制步进电机的运动。
2.1硬件初始化在软件设计开始之前,需要对MSP430单片机的相关硬件进行初始化设置。
包括设置时钟源、引脚功能、定时器等。
根据具体的单片机型号,可以参考官方提供的资源来进行初始化设置。
2.2电机控制算法步进电机的控制主要通过控制电流脉冲来实现。
根据步进电机的型号和控制要求,可以选择不同的控制算法,如单相步进、双相步进或者微步控制等。
通过控制电流脉冲的频率、信号大小来控制步进电机的转动方向以及速度。
2.3交互界面设计可以通过开发板上的按键、液晶显示屏、串口等方式,设计一个交互界面,用于用户输入控制命令、设置参数以及显示系统状态等。
基于MSP430单片机的步进电机控制器的设计与实现

基于MSP430单片机的步进电机控制器的设计与实现步进电机是一种常见的电动机类型,它通过以固定的步进角度运动来驱动机械装置。
MSP430单片机是一种低功耗、高性能的微控制器,适合用于步进电机控制器的设计与实现。
本文将介绍基于MSP430单片机的步进电机控制器的设计与实现方法。
首先,我们需要了解步进电机的原理和工作方式。
步进电机的转动是通过控制电流的方向和大小来实现的。
根据步进电机的类型和设计参数,我们可以确定所需的控制电流和相位方式。
常见的步进电机类型有单相和双相两种,其中双相步进电机是最常见的。
接下来,我们需要确定MSP430单片机的引脚分配。
通常,步进电机的驱动信号需要4个引脚来控制,分别是两个控制电流的引脚(A+和A-)和两个控制电流的引脚(B+和B-)。
根据MSP430单片机的引脚数量和功能,我们可以选择适当的引脚来连接步进电机。
设计步进电机控制器的核心是编写控制算法。
在MSP430单片机上,我们可以使用C语言或汇编语言编写程序来控制步进电机的转动。
下面是一个简单的C语言程序示例:```c#include <msp430.h>#define APlus BIT0 // P1.0对应步进电机A+引脚#define AMinus BIT1 // P1.1对应步进电机A-引脚#define BPlus BIT2 // P1.2对应步进电机B+引脚#define BMinus BIT3 // P1.3对应步进电机B-引脚void delay(unsigned int ms) //延时函数unsigned int i, j;for (i = 0; i < ms; i++)for (j = 0; j < 110; j++);void main(void)WDTCTL=WDTPW,WDTHOLD;//停止看门狗定时器P1DIR = APlus , AMinus , BPlus , BMinus; // 设置引脚为输出模式while (1)P1OUT = APlus , BPlus; // 设置两个控制电流引脚为高电平delay(500);P1OUT = AMinus , BPlus; // 设置两个控制电流引脚为高低电平delay(500);P1OUT = AMinus , BMinus; // 设置两个控制电流引脚为低电平delay(500);P1OUT = APlus , BMinus; // 设置两个控制电流引脚为高电平低电平delay(500);}```以上程序实现了一个简单的步进电机控制器。
用MSP430F149单片机实现步进电机通用控制器
用MSP430F149单片机实现步进电机通用控制器1.前言基于步进电机的控制系统,除了步进电机一般还需要专门的驱动电源,驱动电源仅仅完成功率驱动部分,用户并不能使整个控制系统按预定的、期望的工作状态运行,必须对它的驱动电源予以控制,用户需要再次开发。
鉴于此,设计了基于MSP430F149单片机实现的步进电机通用控制器,可以满足大多数控制场合下的要求。
控制器的主要功能为:①可控制多套步进电机驱动系统;目前可同时控制3套系统。
②工作方式灵活,可按设定的曲线运行,曲线最多达8段;可按外部检测到的控制信号运行;可按模拟调节测试功能运行;2.系统的设计 2.1系统的结构本控制器主要实现了多台步进电机在多段曲线上的运行控制。
系统结构如图1所示。
2.2微处理器的选择本设计选用了TI公司所生产的MSP系列单片机MSP430F149。
目的是应用其丰富的接口资源和强大的定时器功能,MSP430F149的性能特点如下:①6个八位并行接口;完全可以实现该系统所有信号的输入、输出,无须硬件扩展,其中P1、P2八位并行端口的每根口线都具有中断功能,使键盘的软、硬件设计变的非常简单。
②12位A/D转换器ADC;完成模拟设定功能。
③强大的定时器功能;TIMER-A3、TIMER-B7分别为带有3个和7个捕捉/比较寄存器的16位定时器,可以满足系统速度的设定及曲线定时的要求。
④液晶驱动模块;⑤内置2KB RAM、60KB的FLASH;MSP430F149所提供的丰富资源,外围硬件扩展只需做很少的工作,不仅设计变得非常简单,而且该控制器体积小、可靠性高。
2.3步进电机起动及加/减速控制方案步进电动机的最高起动频率(突跳频率)一般为0.1KHz 到3-4KHz,而最高运行频率则可以达到N*102 KHz。
以超过最高起动频率的。
基于MSP430步进电机控制器的设计51单片机
基于MSP430步进电机控制器的设计附录附录:源程序清单主控程序:#include<regx51.h>#define uchar unsigned char#define uint unsigned intsbit up=P2^1; //提速sbit down=P2^2; //减速sbit rotation=P2^0; //转向sbit run=P2^3;int speed=10;static ROT=0; //正转(反转)static uint step=0; //起始步//void delay (int i){int k=100;while(i--)while(k--);}Z() //步进方向{switch(step){case 0:P1=0x01;break; case 1:P1=0x04;break; }}F() //步进方向{switch(step){case 0:P1=0x02;break; case 1:P1=0x08;break; }}Fangxiang(){if(!rotation){if(!rotation){TR0=0;ROT=!ROT;TR0=1;do{}while(!rotation);P0=0;}}}void Speed1() //速度{if(!up){delay(2);speed=speed+10;}if(!down){delay(2);speed=speed-10;}}work() //启停{if(!run){delay(100);if(!run)TR0=!TR0;do{}while(!run);}}main(){TCON=0;IE=0x82;TMOD=0x01;while(1){W ork();Speed1();Fangxiang();if(ROT==0)Z();//正转else F();//反转}}void timer0() interrupt 1 {TH0=(65535-speed)/255; TL0=(65535-speed)%255;step=++step;delay(1);if(step>=2)step=0;}测速程序:#include<regx51.h>#define uchar unsigned charuchar j,k,i,a,b,sin,A1,A2,A3,aecond;uchar code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; void delay (uchar i){for(j=i;j>0;j--)for(k=125;k>0;k--);}void display(){P0_0=0;P1=table[A1];delay(5);p0_0=1;P0_1=0;P1=table[A2];delay(5);P0_1=1;P0_2=0;P1=table[A3];delay(5);P0_2=1;}void main(){TCON=0x11;IE=0x83;TMOD=0x01;while(1){P2=R;A1=R/100;A2=R/10%10;A3=R%10;for(a=2000;a>0;a--){for(b=10;b>0;b--) display();}}}void timer0() interrupt 1 {static uchar sin=0;TH0=(65535-50000)/255; TL0=(65535-50000)%255; sin++;if(sin>=20){sin=0;R=second;second=0;}}void cesu() interrupt 0 {second++;}。
MSP430单片机_步进电机与直流电机控制设计

MSP430单片机_步进电机与直流电机控制设计步进电机和直流电机是常用于控制系统中的电机类型,它们在工业自动化、机器人、医疗设备等领域有着广泛的应用。
本文将重点介绍MSP430单片机控制步进电机和直流电机的设计。
步进电机是一种将电脉冲信号转化为角位移或线性位移的电机,它具有定步进角、驱动简单、精度高等特点。
下面是步进电机控制设计的主要步骤:1.确定电机的参数:步进电机的参数包括相数、相电阻、相感应、步距角等,这些参数决定了控制步进电机的电流大小和步进角度。
2.选择正确的驱动电路:常见的步进电机驱动电路有双极性驱动和四相八线驱动。
双极性驱动适用于电流较大的步进电机,而四相八线驱动适用于电流较小的步进电机。
3.设计控制电路:步进电机的控制电路通常是由一个逻辑电平产生器和一个驱动电路组成。
逻辑电平产生器用于产生脉冲信号,而驱动电路则根据脉冲信号控制步进电机的运行方向和速度。
4.编写控制程序:使用MSP430单片机编写控制程序,通过控制IO口输出脉冲信号,将步进电机驱动起来。
控制程序需要根据步进电机的参数来确定脉冲频率和方向,以实现步进电机的转动。
5.调试和优化:通过调试和优化控制程序,调整脉冲频率和方向,使步进电机能够按照预定的角度或线性位移进行运动。
直流电机是一种常见的电动机,在各种控制系统中被广泛应用。
下面是直流电机控制设计的主要步骤:1.确定电机的参数:直流电机的参数包括额定电压、电流和功率等,这些参数决定了控制直流电机的电流大小和速度。
2.选择正确的驱动电路:常见的直流电机驱动电路有H桥驱动和单向驱动。
H桥驱动适用于正反转控制,而单向驱动只能实现单一方向的运动。
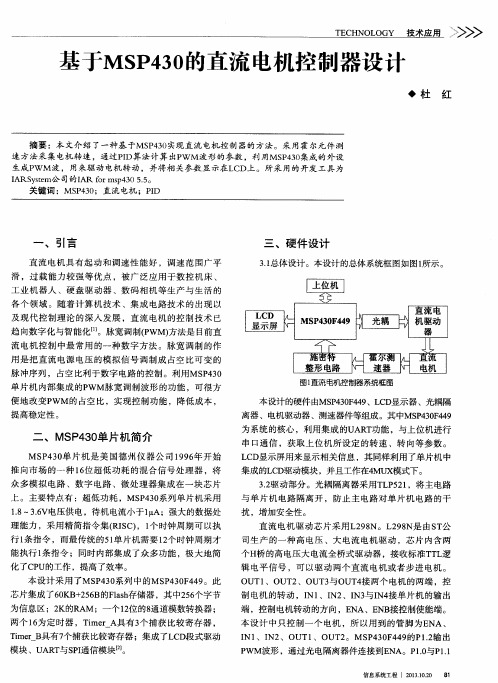
3.设计控制电路:直流电机的控制电路通常由一个PWM信号发生器和一个驱动电路组成。
PWM信号发生器产生调制信号,控制电机的转速和转向,驱动电路则根据PWM信号给电机供电。
4.编写控制程序:使用MSP430单片机编写控制程序,通过控制IO口产生PWM信号,将直流电机驱动起来。
基于MSP430实现的步进电机控制
.作品概述第一节基本情况MSP430G2系列Launchpad是TI推出的一款低成本的开发平台。
它适用于适用于TI 最新MSP430G2xx 系列产品,其基于USB 的集成型仿真器可提供为全系列MSP430G2xx 器件开发应用所必需的所有软、硬件。
本作品选择MSP430G2231为Launchpad核心板的单片机,采用Launchpad核心板加底板的形式,实现了对步进电机的四相四拍和四相八拍控制,并实现了转动方向和转动速度的控制,并且用数码管显示转动方向和转动速度的百分比。
第二节软硬件总体设计方案本作品选择MSP430G2231为Launchpad核心板的单片机,采用Launchpad 核心板加底板的形式,对步进电机进行控制。
滑变,即滑动变阻器,用来控制电机的转速,本系统共有两个拨动按键,一个拨动按键用来选择步进电机的模式,如四相八拍或四相四拍,另一个拨动按键用来控制转动方向。
数码管可用来显示模式和方向,以及转速的百分比。
系统总体设计框图如下图1.2.1 系统总体设计框图在硬件设计时,只需设计外围电路,留出与Launchpad核心板的接口即可,既节约了设计时间,又节省了成本,而且无需额外购买仿真器,从而使设计成本到达最低。
在软件设计方面,可充分利用G2系列单片机的各个功能模块,如时钟系统、TA定时器、ADC10模数转换器,看门狗,以及IO口中断等资源,设计出高效率、低功耗、结构紧凑而又功能强大的产品。
第一章作品硬件系统设计第一节MSP430G2系列Launchpad开发板组成及硬件资源情况介绍MSP430G2系列Launchpad是TI推出的一款低成本的开发平台。
它适用于适用于TI 最新MSP430G2xx 系列产品,其基于USB 的集成型仿真器可提供为全系列MSP430G2xx 器件开发应用所必需的所有软、硬件。
LaunchPad 具有集成的DIP 目标插座,可支持多达20 个引脚,从而使MSP430 Value Line 器件能够简便地插入LaunchPad 电路板中。
基于MSP430单片机控制直流电子负载电路设计

基于MSP430单片机控制直流电子负载电路设计MSP430是一种经济实用的单片机,可用于控制各种电路和设备。
在本文中,我们将介绍如何使用MSP430来设计和控制直流电子负载电路,以实现器件/电路的电流加载和调整。
1. 设计要求首先,我们需要确定设计要求。
在这种情况下,我们需要设计一个可以接受不同负载并能够调整电流的负载电路。
电流调整范围需要在1A-5A之间。
2. 电路设计基于上述要求,我们可以根据以下电路设计实现:(1)预调芯片(LM358)非反馈电路(A2-A3)用于获取电路的电流信号,并将其与输入电压进行比较,输出的电流向上和向下调节。
(2)MSP430单片机与直流电子负载电路的控制电路相连。
(3)电阻调节装置可用于改变电路的电阻。
(4)负载电路和电源电路应使用稳压器和过压/过流保护器等。
3. 直流电子负载电路的编程我们需要将直流电子负载电路编程,以实现对电路的调节。
MSP430单片机可实现数字输入输出、定时器、比较器、计数器等功能。
这些功能在电路调节的过程中非常有用。
在编程过程中,我们将使用MSP430的定时器/计数器模块来创建一个滞后的PID算法。
这个算法将响应电路中的误差,并动态调整电流以达到我们所需的电路故障标准。
此外,我们还将使用比较器模块来比较预设的电流值和实际电流值。
此外,我们还需要使用数字输入/输出模块来从电阻调节装置获取值。
这将允许我们根据需要动态调整电路的电阻,从而实现对电路的更精细调节。
4. 结论通过使用MSP430单片机与直流电子负载电路相连,我们可以创建一个高度精细的直流电子负载电路。
这个电路可以接受不同的负载并调节电流以达到我们所需的电路故障标准。
要实现这个电路,我们需要了解MSP430单片机的基本功能并将其应用于我们的设计中。
基于MSP430步进电机控制器的设计
基于MSP430步进电机控制器的设计摘要随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
本设计是采用MSP430单片机对步进电机的控制,通过I/O口输出的时序方波作为步进电机的控制信号,信号经过芯片ULN2003驱动步进电机;同时,用 4个按键来对电机的状态进行控制,并用数码管动态显示电机的转速。
系统由硬件设计和软件设计两部分组成。
其中,硬件设计包括MSP430单片机的电源模块、键盘控制模块、测速模块、步进电机驱动(集成达林顿ULN2003)模块、数码显示(SM420361K数码管)模块6个功能模块的设计,以及各模块在电路板上的有机结合而实现。
软件设计包括键盘控制、步进电机脉冲、数码管动态显示以及转速信号采集模块的控制程序,最终实现对步进电机转动方向及转动速度的控制,并将步进电机的转动速度动态显示在LED数码管上,对速度进行实时监控显示。
软件采用在IAR for MSP430软件环境下编辑的C语言。
本系统具有智能性、实用性及可靠性的特点。
关键词:步进电机 MSP430单片机角位移转速控制方向控制AbstractWith the development of microelectronics and computer technology, increasing demand for stepper motor, which is widely used in printers, electronic toys and consumer products such as CNC machine tools, industrial robots, medical equipment and electrical products, and its various national fields are applied. Of stepper motor control system to improve the control accuracy and response speed, energy conservation and so important.This design is used MSP430 of Stepping motor control, through the IO port as a square wave output of the timing of step motor control signal, the signal through the ULN2003 driver chip stepper motor; the same time, with four buttons to the status of the motor control, and dynamic display with digital control motor speed.System consists of hardware and software design of two parts. Among them, the hardware design, including minimum system MSP430 microcontroller, power supply module, keyboard control module, stepper motor drive (integrated Darlington ULN2003) module, digital display (SM420361K digital control) module, speed modules (including the Hall probe UGN3020) six function modules, and each module in the circuit board to achieve the organic combination. Software design, including keyboard control, stepping motor pulse, the digital dynamic display and speed signal acquisition module, control procedures, and ultimately to the stepper motor rotation direction and rotation speed control of stepper motor rotation speed and dynamic display in the LED digital tube, real-time monitoring of the speed display. Software used in the software environment to edit IAR for MSP430 C language. This system has the intelligence, practicality and reliability features.Key Words:Stepping motor MSP430 Angular displacement Speed control Direction control目录摘要 (I)第一章绪论 (1)1.1课题背景 (1)1.2国内外发展现状 (1)1.3本文设计的任务 (3)第二章系统概述 (4)2.1系统的总体框架 (4)2.1.1 系统的组成 (4)2.1.2系统的工作原理 (5)2.2系统的主要功能 (5)2.2.1 步进电机的主要功能 (5)2.2.2 系统的特点 (5)3.1MSP430系列单片机简介 (6)3.1.1 MSP430系列单片机功能特性 (6)3.1.2 MSP430系列单片机的应用 (8)3.2MSP430F149型单片机 (8)3.2.1 MSP430F149的引脚图 (8)3.2.2 MSP430F149的微处理器CPU (9)3.2.3工作方式 (9)3.3步进电机 (11)3.3.1 步进电机概述 (11)3.3.2 步进电机的特性 (11)3.3.3 步进电机的种类 (12)3.3.4 永磁步进电机的控制原理 (12)3.4步进电机控制器系统的组成 (14)3.4.1 电源设计 (15)3.4.2 键盘控制电路 (15)3.4.3 LED数码显示电路 (16)3.4.4 测速电路介绍 (18)3.4.5 步进电机驱动电路 (19)第4章控制系统软件的设计 (22)4.1程序设计前期准备 (22)4.1.1 程序设计平台 (22)4.1.2 程序设计思路 (24)4.2程序流程图 (25)4.2.1 主程序流程图 (25)4.2.2 读键盘子程序流程图 (26)4.2.3 键盘处理子程序流程图 (27)4.2.4 电机控制中断程序流程图 (30)第5章系统调试 (35)5.1系统的调试 (35)5.2运行结果 (35)第6章总结 (37)致谢 (38)参考文献 (39)附录 (41)南京工业大学本科生毕业设计(论文)第一章绪论1.1 课题背景当今社会,电动机在工农业生产、人们日常生活中起着十分重要的作用。
基于MSP430实现的步进电机控制
基于MSP430实现的步进电机控制步进电机是一种常见的电动机,特点是步进角固定,平稳运行,精度高,广泛应用于机械和自动控制领域。
本文主要介绍基于MSP430微控制器的步进电机控制实现。
步进电机是一种将电能转换为机械能的装置,其转子每次运动一定的角度,可以控制定位的精度。
步进电机由定子和转子组成,定子上有若干个绕组,每个绕组对应一个磁极。
转子上有若干个永磁体,与定子的磁极相对应。
定子绕组按照特定的顺序通电,可以使转子定角度运动。
MSP430是一种低功耗的微控制器,广泛应用于嵌入式系统中。
它具有丰富的外设和强大的运算能力,适用于实时控制任务。
步进电机控制的关键是按照特定的顺序给定子绕组通电。
常见的控制方式有单相全步进、双相全步进、单相半步进等。
每种控制方式具有不同的定位精度和工作效率。
在MSP430上实现步进电机控制,需要连接步进电机驱动电路并编写控制程序。
步进电机驱动电路由MSP430的IO口控制,通过输出高低电平来控制步进电机的运动。
控制程序需要按照特定的顺序将对应的IO口设置为高电平,从而达到控制步进电机运动的目的。
以下是基于MSP430实现步进电机控制的一般步骤:1.连接步进电机驱动电路:根据步进电机的型号和电路要求,连接驱动电路到MSP430的IO口。
通常需要一个或多个MOSFET或BJT来控制步进电机的相位。
2.初始化IO口:在程序开始时,需要将用来控制步进电机的IO口初始化为输出模式,并设置初始电平。
3.编写控制程序:根据步进电机的控制方式,编写相应的控制程序。
通常使用循环结构,按照特定的序列控制IO口的高低电平。
4.循环控制:在控制程序中,使用循环结构无限循环执行步进电机的运动。
根据步进电机的控制方式,确定每一步的运动方向和步长。
5.延时控制:步进电机的转动需要一定的时间间隔,控制程序中需要添加延时函数,保证每步的时间一致。
可以使用MSP430的定时器来实现精确的延时操作。
6.控制运动范围:根据需要控制步进电机的运动范围,可以通过控制循环次数或其他方式实现。
基于MSP430单片机的直流无刷电机控制系统设计
毕业设计说明书基于MSP430单片机的无刷直流电机控制系统设计2013年6月基于MSP430单片机的无刷直流电机控制系统设计摘要无刷直流电动机是在有刷直流电动机的基础上发展起来的。
现阶段,虽然各种交流电动机和直流电动机在传动应用中占主导地位,但无刷直流电动机正受到普遍的关注。
自20世纪90年代以来,随着人们生活水平的提高和现代化生产、办公自动化的发展,家用电器、工业机器人等设备都越来越趋向于高效率化、小型化及高智能化,作为执行元件的重要组成部分,电机必须具有精度高、速度快、效率高等特点,无刷直流电机的应用和需求也因此而迅速增长。
本设计是把无刷直流电动机作为设计对象,以MSP430单片机为控制MCU,单片机采集比较电平及电机霍尔反馈信号,通过软件编程控制无刷直流电动机。
将整个系统分成几个部分,讨论了各个部分的电路原理、控制策略、具体实现。
根据永磁无刷直流电动机的特性实施脉宽PWM控制,并通过转速传感器测量转速通过LCD1602动态显示转速。
关键词:无刷直流电动机,单片机,霍尔位置传感器MSP430 Microcontroller-based brushless DCmotor Control System DesignAbstractBrushless DC motor in a brush DC motor developed on the basis of. At this stage, although exchanges of all kinds of DC motors and motor drive in the application of the dominant, but brushless DC motor is under common concern.Since the 1990s, as people's living standards improve and modernize production, the development of office automation, household appliances, industrial robots and other equipment are increasingly tend to be high efficiency, small size and high intelligence, as the implementation of components An important component of the motor must have a high accuracy, speed, high efficiency, brushless DC motor and therefore the application is also growing rapidly.This design is the brushless DC motor as the electric bicycle motor-driven control system, MSP430 microcontroller for control MCU, SCM collection and comparison-level electrical signal Hall feedback, software programming through brushless DC motor controller .This paper analyzes the requirements from the system, the whole system will be divided into several parts, analysis and discussion of the various parts of the circuit of the control strategy, implementation method. According to the permanent magnet brushless DC motor control of the PWM pulse width, speed sensor and display speed through LCD1602.Key words:BLDCM,the single chip processor,hall position sensor目录1 引言 (1)1.1电机的分类 (1)1.2无刷直流电机及其控制技术的发展 (1)1.3本文研究的意义及主要内容 (3)2 设计主要部件介绍 (4)2.1无刷直流电机介绍 (4)2.1.1 无刷直流电机组成 (4)2.1.2 无刷直流电机工作原理 (4)2.1.3无刷直流电机主要工作方式 (5)2.2 MSP430单片机介绍 (7)2.2.1 MSP430单片机特点 (7)2.2.2单片机选型 (8)2.2.3 MSP430F149介绍 (9)2.3 LM621介绍 (10)2.4 涡轮流量计介绍 (11)2.5脉宽调制技术介绍 (11)3 直流无刷电机的模糊PI控制 (13)3.1模糊控制器在直流无刷调速系统中的应用 (13)3.2直流无刷电动机数学模型 (13)3.3模糊PI控制器 (15)4 控制系统设计 (18)4.1系统总体功能介绍 (18)4.2 MSP430F149单片机最小系统 (19)4.3显示模块介绍 (20)4.3.1显示模块硬件设计 (20)4.3.2显示模块软件设计 (21)4.4驱动模块介绍 (23)4.4.1 驱动模块硬件设计 (23)4.4.2 PWM控制软件设计 (23)4.5按键模块介绍 (24)4.5.1按键模块硬件设计 (24)4.5.2按键模块软件设计 (25)4.6 限流电路设计 (26)4.7速度反馈电路设计 (27)结论 (28)附录A (29)附录B (39)参考文献 (40)致谢 (41)1引言随着计算机进入控制领域,以及新型的电力电子功率器件的不断出现,采用全控型的开关功率元件进行脉冲调制(Paulse width modulation,简称PWM)控制的无刷直流电机已成为主流。
基于MSP430单片机的步进电机控制系统设计
单 片 机 的 应 用 程 序 。 通 过 综 合 利 用 ’()%$"*&$# 单 片 机 的
+,’-./0 中 断 模 块 , 串 行 异 步 通 信 模 块 , 键 盘 以 及 1-2
的接口以及配套的相应设备, 可 以 建 立 步 进 电 机 控 制 系 统 模型。它具有通过串口和按键 两 种 控 制 方 式 控 制 步 进 电 机 的转速、旋转方向以及启动和停止步进 电 机 , 并 且 在 1-2 上显示当前步进电机运行状态信息的功能,包括运行速 度,当前运行的距离等信息。 系统的工作流程图如图 ! 所示:
’()%$"+&$# 单 片 机 , 通 过 -4’=GH, 定 时 器 产 生 脉 冲 信
号,通过对脉冲信号的控制完成对步进电机的控制。 步进电机的驱动图如图 & 所示,其中 )IC 表示步进脉 冲 输 入 端 , >4G 表 示 步 进 电 机 旋 转 方 向 的 正 反 选 择 位 ,
’()%$" 的 &* 位 定 时 器 中 断 可 用 于 时 间 计 数 , 时 序 发
利 用 ’()%$" 专 用 工 具 而 设 计 的 扩 展 功 能 , 提 供 了 友 好 的 用 户 界 面 和 强 大 的 调 试 系 统 , 十 分 便 于 开 发 ’()%$" 系 列
收稿日期: !""# — "* — !.
$*
机电工程技术 !""# 年第 $% 卷第 && 期
电机控 制
% 步进电机的驱动
步进电机不同于一般的电机,所以它的驱动需要一 个专门的驱动器。驱动器的作用是根据控制信号,使步 进电机的绕组按照特定的顺序通断电,完成电机转子的 转动动作。 在本系统中采用 >’>%"$ 步进电 机 驱 动 器 , 该 驱 动 器 可 以 进 行 !#* 细 分 , 可 以 完 成 步 进 距 离 的 毫 米 精 度 的 控 制,满足本&<=& 年生,陕西西安人,硕士研究 生。研究领域:工业自动化和嵌入式控制系统。
基于MSP430的直流电机控制器设计
产生外部 中断时 ,t i me s ; f J I 1 1 ;1 s 定 时器 中断到时 ,
停 止计 数 。
# p r a g ma ve c t o r = POR T2 VECT OR
_
l
l
1
0
0
1
正转
履转
1 l
0
l 0
X
号 的频 率 。
4 . 4 P I D算法 。P I D( k L 例 、积分 、微分) 控制技术在
自动控制系统 中正得 到越来越广泛 的应用。P I D 调节器
是一种线性调节器 ,它将给定值r ( t ) 与实际输 出值 c ( t ) 的 偏差 的比例( P ) 、积分( I ) 、微分( D ) 通过线性组合构成控
模块 、U A R T 与S P I 通信模块 。
P WM波形 ,通过光电隔离器件连接到E N A。P 1 . 0 与P 1 . 1
信息 系统 工程 l 2 0 1 3 . 1 0 . 2 0 8 1
<
T E C H N O L O G Y 技 术 应 用
通过光 电隔离器件分别连接I N1 、1 N2 。 真值表如表 1 所示。 3 . 3 转速检测部分 。对 于转速的检测方法 ,常见的
部 中断模式。
t i me r A工作在增计数模式 ,输 出模式7 ,利用C C R O 确
定P WM波形 的周期 ,C C R1 确定P WM波形 的占空 比。 代码如下 :
T A C T L=T A S S E L 2+T AC L R +MC 1 ; / / 设置
制量 对控制 对象进 行控制[ 4 1 。模拟 电路 的P I D控制器
msp430控制步进电机实验报告
计算机硬件应用课程设计一、实验内容及要求题目:步进电机控制设计使用单片机为核心,设计一个步进电机控制器。
基本要求:使用单片机为控制核心,编写程序并设计硬件结构,实现对步进电机的控制。
步进电机按固定方向连续转动。
对电机的运行方向进行控制,如:要求按下A 键时,能够控制步进电机正转;按下B键时,能够控制步进电机反转。
提高要求(选作):用LED数码管显示步进电机的转动状态;增加启动、停止控制按键。
二、小组成员三、实验软硬件环境简介硬件环境:MSP430G2553单片机一块,五线四相步进电机一个,驱动芯片ULN2003一块,开关三个,下载线一根。
软件设计:仿真软件PROTEUS Professional;代码编写软件IAR;WINDOWS操作系统。
四、设计方案分析步进电机是一种能够将电脉冲信号转换成角位移或线位移的机电设备,它实际上是一种单相或多相同步的步进电机。
单相步进电机由单路电脉冲驱动,输出功率一般很小,故需要加一个驱动电路。
当向脉冲分配器输入一个脉冲时,电动机各相的通电状态就会发生改变,转子会转过一定的角度(称为步距角)。
正常情况下,步进电机转过的总角度和输入法的脉冲数成正比;连续输入一定频率的脉冲时,电动机的转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响。
步进电机的不同驱动方式,都是在工作时,脉冲信号按一定顺序轮流加到三相绕组上,从而实现不同的工作状态。
步进电机有三线式、五线式、六线式三种,但其控制方式均相同,都必须以脉冲电流来驱动。
若每转一圈以20个励磁信号来计算,则每个励磁信号前进18°,其旋转角度与脉冲数成正比,正反转可以由脉冲顺序来控制。
步进电机的励磁方式可分为全部励磁及半步励磁,其中全部励磁又有1相励磁及2相励磁之分,而半步励磁又称为1-2相励磁。
1相励磁法:在每一瞬间只有一个线圈导通。
消耗电力小,精确度良好,但转矩小,振动较大,每一励磁信号可走18°。
基于MSP430步进电机控制器的设计

基于MSP430步进电机控制器的设计步进电机控制器是一种用于驱动步进电机的控制设备,能够精确控制电机的速度和位置。
本文将基于MSP430微控制器进行步进电机控制器的设计,并详细介绍设计的过程和主要功能。
首先,我们选择MSP430微控制器作为步进电机控制器的核心芯片。
MSP430是一款低功耗的微控制器,具有强大的运算能力和丰富的外设接口,非常适合用于步进电机控制。
此外,MSP430还具有低功耗特性,可以提高步进电机控制器的效能。
步进电机的控制原理是通过依次激活电机的每个相位来实现旋转。
因此,我们需要在步进电机控制器中添加适当的驱动电路,以实现相位的选择和激活。
在步进电机控制器中,我们可以使用MSP430的GPIO(通用输入输出)引脚来实现与电机驱动电路的连接。
通过一个引脚来控制电机的使能信号,可以实现对电机的启停控制;通过几个引脚来控制电机的相位选择,可以实现对电机的旋转方向和速度的控制。
同时,我们还可以利用MSP430的定时器来生成适当的脉冲信号,用于控制步进电机的旋转。
通过设置定时器的周期和占空比,可以实现不同的步进模式(如全步进和半步进),从而实现更精细的电机控制。
此外,为了提高步进电机控制器的稳定性和可靠性,我们可以添加额外的保护电路和状态监测功能。
例如,通过添加电流检测电路,可以实现对电机工作状态的实时监测;通过添加过压和过载保护电路,可以避免电机因异常情况而损坏。
这些保护电路可以通过MSP430的ADC(模数转换器)模块进行数据采集和处理。
总结来说,基于MSP430微控制器的步进电机控制器的设计需要考虑硬件设计和软件设计两个方面。
在硬件设计中,需要选择合适的外设连接并添加保护电路和状态监测功能;在软件设计中,需要编写驱动程序和控制算法,并使用MSP430的软件开发工具进行开发和调试。
通过合理设计和优化,我们可以实现一个高效、稳定和可靠的步进电机控制器。
msp430控制步进电机的详细程序
//时序输出 //调取延时选择子函数
delay(m); P3OUT=BIT0+BIT1; Speed_Update(); delay(m); P3OUT=BIT2+BIT1; Speed_Update(); delay(m);
//延时
1
P3OUT=BIT2+BIT3; Speed_Update(); delay(m); a=P1IN&0X10; b=P1IN&0X20; } } else if((a!=0x10)&&(b==0X20)) { while((a!=0x10)&&(b==0X20)) { P3OUT=BIT2+BIT3; Speed_Update(); delay(m); P3OUT=BIT2+BIT1; Speed_Update(); delay(m); P3OUT=BIT0+BIT1; Speed_Update(); delay(m); P3OUT=BIT0+BIT3; Speed_Update(); delay(m); a=P1IN&0X10; b=P1IN&0X20; } } else { while(b!=0X20) { P3OUT=0; Speed_Update(); delay(m); P3OUT=0; Speed_Update(); delay(m); P3OUT=0; Speed_Update(); delay(m); P3OUT=0; Speed_Update(); delay(m); a=P1IN&0X10;
case 2: m=1000; break;
case 3: m=800; break;
case 4: m=700; break;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
//选择使用采样定时器, 转换模式选择-序列通道多次转换模式
ADC12CTL1 = ADC12SHP+ADC12CONSEQ_3
ADC12MCTL3 = ADC12INCH_7 ;
//选择模拟输入通道
ADC12IE = BIT7;
// 中断使能 ADC12IFG.5
ADC12CTL0 |= ADC12ENC;
步进电机
2电路实现--- 连接示意图
直流电机
2电路实现---IO设置
通过DRV8833控制直流电机不步进电机
5V电压通过1N5819整流为DRV8833提供工作电压
MSP430F6638端口P1.1,P1.4,P1.7,P3.1作为
DRV8833的xIN输入端口;
VDD_5V
D7 1N5819 DC_5V
步进电机运行方向IO给电顺序
3代码实现--- 功能列表
步进电机
控制换相顺序: 通电换相这一个过程称为脉冲分 配;
控制步进电动机的转向:正转,反转;
控制步进电动机的速度:给步进电机一个脉冲, 就转一步;再发一个脉冲,会再转一步;两个脉冲 的间隔时间越短,步进电动机就转得越快;调整发 出的脉冲频率,就可以对步进电机进行调速; 脉 冲的频率决定了电机的转速。
1实现原理---步进电机
三相式步进电机内部结构
1实现原理---步进电机
概念 步进电机旋转的根本原因 错齿 术语 齿距角:齿之间的距离 步距角: 转子走一步所转过的角度 失步:转子的转速慢于换相速度则会引起失步 振荡:转子在电磁力的作用下在平衡点左右振 荡 拍:对绕组通电一次的操作称为一拍 对齿 错齿
}
4代码分析--- 直流电机
直流电机运行
通过DRV8833的AOUT1与AOUT2口控制直流 电机的运转;
通过PWM控制直流电机的转速;
通过定时器中断输出PWM脉冲,并通过调节中 断的间隔时间来调整PWM的占空比;
定时器初始化
void Timer0_PWM(void){ TA0CCTL0 |= CCIE;//TA0中断允许 TA0CCR0 = 1024; //TA0输出32HZ TA0CCTL3 |= OUTMOD_7 + CCIE TA0CCR3 = 512; // TA0.3输出50%PWM //ACLK,up mode,clear TAR TA0CTL = TASSEL_1 + MC_1 + TACLR;}4代码分Fra bibliotek--- 转速控制
电机转速控制
电机转速的控制是通过电位器完成的,通过ADC 采集电位器上的电压,根据电位器上电压的变化来 改变定时器TAxCCRx的值;
步进电机通过改变TA0CCR0的值,减小或增加中 断时间间隔,进而改变步进电机的运行速度
直流电机通过改变TA0CCR3的值,调节PWM占 空比,进而改变直流电机运行速度
BIN1
6 BISEN 7 BOUT1 8 NFAULT
nSLEEP AOUT1 AISE
AOUT2 BOUT2
BISE BOUT1
DRV8833PWPR
CON2
1 2 3 4
CON4
2
1 R1 1k VDD_5V
D1 RED
2电路实现--- DRV8833
根据设计需求,xISE需要-0.3-0.5大小的压降
for(i=0;i<4;i++) tem += A1results[i];
tem = tem>>2; if(change==1){
Set_TA0CCR0(tem);//改变TA0CCR0 }else{
TA0CCR3 = tem; );//改变TA0CCR3 } } }
通过改变定时器的时间间隔改变步进电机的运转 速度
4代码分析--- 步进电机
步进电机运行
void Timer0_Init(void) {
TA0CCTL0 |= CCIE;//允许TA0中断 TA0CCR0 = 131;//TA输出频率=250HZ(32768/131) //TA0时钟选择ACLK(32.768KHz),计数模式为曾模式 TA0CTL |= TASSEL_1 + MC_1 + TACLR; __enable_interrupt();//开启中断 }
步进电机的通电方式(三相步进电机为例) 单相通电方式:“单”指每次切换前后只有一相绕 组通电 双拍工作方式:“双”是指每次有两相绕组通电 单、双拍工作方式: 单双两种通点方式组合应用
1实现原理---步进电机
概念 整步方式:单相,两相通电 半步方式: 单相与两相通电交替在一起;
通电顺序: ● A->B ->/A -> /B ● AB -> /A B->/A /B -> A /B ● A ->AB->B ->/A B->/A ->/A/B ->/B->A /B
AISE BISE
R2
R3
1R
1R
Current Sense Resistors
2电路实现--- 电机选择
DRV8833可以控制两个直流电机或一个步进电机,通过一个双 向开关现在工作的电机;
2电路实现--- 电机选择
步进电机 步进电机选择的是PFCU20 步进电机内部结构图
2电路实现--- 电机选择
1实现原理---步进电机
概念 ● A -> B ->C ->A 三拍 ● 40个齿的三相步进电机 ● N=3 ● 转子每拍走一步,转一个齿距角需要三步 ● 步距角= 360/3/40=3度 ●齿距角=360/40=9度
1实现原理---步进电机
步进电机的工作原理 如果给处于错齿状态的相通电,则转子在电磁力 的作用下,将向磁导率最大(或磁阻最小)的位置转 动,即向趋于对齿的状态转动;
// 转换允许
ADC12CTL0 |= ADC12SC;
// 开始采样与转换
}
4代码分析--- 转速控制
ADC12中断处理函数
#pragma vector=ADC12_VECTOR //中断地址 __interrupt void ADC12ISR (void) //ADC12采集中断函数 {
unsigned int tem=0,i; static unsigned char index = 0; A1results[index] = ADC12MEM7; //获取采集到的电压值 index = (index+1)%Num_of_Results; if(index == 0) {
1实现原理---直流电机
直流电机结构 转子(电枢):由铁芯,绕组,换向器组成 定子 永磁式:有永久磁铁做成 励磁式:磁极上绕线圈,然后在线圈中通过直 流电,形成磁铁
1实现原理---直流电机
直流电机工作原理
直流电机运行时,将直 流电源接在两刷之间,电 流方向为:N级下有小边 电流总是一个方向,而S 级下有效边中电流总是另 一个方向,两边上受到的 电磁力方向一致,电枢因 而转动,当线圈有效边从 N(S)级下转到S(N)级下 时,其中电流方向由于换 向片而同时改变,而电磁 力方向不变,因而电机连 续运行
Going(direction); } }
4代码分析--- 步进电机
步进电机运行
//步进电机正向运转IO控制时序 const unsigned char motortb[]={0x05,0x09,0x0a,06};
void a_step(unsigned char d){ unsigned char temp; if(d&0x01){//正方向运转 if(np==0) np=3; else np--; }else{//反方向运转 if(np==3) np=0; else np++; } temp = motortb[np]; OutData(temp);//IO口对应位置输出
36 37 35 36
17 16 TEST 16 15 RST
P3.3 34 35
15 14 P8.5
P7.6 33 34
14 13 P8.6
P7.7 32 33
13 12 P6.3
31 32
12 11 P6.4
31
11
P6.5
BOOSTERPACK
2电路实现---DRV8833
DRV8833PWPR设计原理图
P1.6
P2.4
P2.5
P1.1 R8 100R AIN1
P1.4
AIN2
P6.6 R9 100R nSLEEP
P6.7
LED
D6 1N5819
U2B
40
20
P8.1 39 40
P8.4 P8.2
38 39 37 38
20 19 19 18
P3.1
R7 100R
BIN1
18 17 P3.0
P8.3 P3.2
步进电机与直流电机控制
张立为
版本管理
修改记录
版本号. V01
作者 张立为
描述
修改日期 2012-10-26
审核记录
版本号.
职务
签名
修改日期
实现原理 电路实现 代码流程 代码分析
轮廓
1实现原理---步进电机
步进电机分类 按工作原理分 反应式电机 永磁式步进电机 混合式步进电机 按输出转矩大小分 快速步进电机 功率步进电机 按励磁相数分 二相,三相,四相等
F1 VDD_5V
AIN1 2.2μF/6.3V C2 AIN2
VM
200MA
C1 0.01-μF, 16V