双机器人协调运动的研究现状
机器人技术中的多机器人协同与协作控制研究

机器人技术中的多机器人协同与协作控制研究随着科技的不断进步,机器人技术的发展也变得越来越成熟。
在很多领域,特别是工业、军事和服务行业中,机器人已经成为关键的助手和合作伙伴。
然而,如何实现多机器人之间的协同与协作一直是一个具有挑战性的问题。
多机器人协同和协作控制是指多个机器人在执行任务时进行有效的沟通和协调,以实现共同的目标。
这个问题涉及到许多关键因素,包括机器人之间的通信、决策制定、路径规划和资源分配等。
在多机器人协同中,通信起着至关重要的作用。
机器人之间需要能够准确地传递信息,以协调彼此的行动。
目前,有许多通信协议和技术可供选择,如蓝牙、Wi-Fi和ZigBee等。
根据具体的应用场景和需求,选择合适的通信方式对于实现良好的协同控制至关重要。
除了通信,决策制定也是多机器人协同控制的关键问题之一。
机器人需要能够共同决策,并根据环境变化进行相应的调整。
传统的决策方法通常通过集中式算法来实现,但这种方式不适用于大规模的多机器人系统。
因此,需要研究和开发分布式决策算法,以实现机器人之间的智能决策制定。
路径规划是多机器人协作控制中的另一个重要问题。
在多机器人系统中,机器人需要根据任务需求找到最优的行进路径。
例如,在救援任务中,机器人需要在避免障碍物和协调与其他机器人的运动之间找到最快最安全的路径。
研究者们通过使用图论、遗传算法和人工智能等方法来解决这个问题,并设计出一些高效的路径规划算法。
此外,资源分配也是多机器人协同控制中的一个重要方面。
在某些应用场景中,多个机器人可能需要共享资源,如能源和传感器数据。
因此,如何在机器人之间进行公平和有效的资源分配成为一个关键问题。
目前已有一些分配算法被提出,例如拍卖算法和合同理论等,这些算法可以根据机器人的需求和贡献进行合理的资源分配。
总结起来,多机器人协同与协作控制的研究是一个复杂而又具有挑战性的课题。
这个问题涉及到许多关键因素,如通信、决策制定、路径规划和资源分配等。
双机器人协调操作的软件开发-开题报告

院系
毕业
设计
领导
小组
审核
意见
难度
综合训
练程度
是否隶属科研项目
教学院长(公章)___________
年月日
备注:1、“题目类型”分为:研究型、设计型和应用型等。
2、题目“难度”分为:A、B、C、D四个等级。
3、“综合训练程度”分为:A、B、C三个等级。
毕业设计(论文)开题报告
学院
专业班级
姓名
学号
题目
双机器人协调操作的软件开发
题目类型
设计开发
一、选题背景及依据
1、国内外研究现状
目前,国内针对单机器人的研究非常多,但在双机器人协调操作研究领域还涉及不多。双机器人在生产实践中应用有着比单机器人更为广阔的前景。随着机器人技术的发展和应用领域的不断扩大,要求机器人所完成的任务越来越复杂,精度越来越高。在工业自动化和柔性生产中,存在这样一些情况,比如,在处理诸如装配复杂工件、搬运大型物体等任务中,单机器人所表现出来的能力越显不足,因而双机器人乃至多机器人系统正逐渐被应用到各个领域中。这种变化不仅能提高机器人自身的利用率,增加产量,而且能最大限度发挥机器人系统的工作潜能,提高机器人的多用途性。另外,双机器人协调工作,可减少机器人的复杂性。现阶段,对于双机器人协调系统的研究主要集中于两个方面:松协调和紧协调。前者是指两个机器人未形成共同抓取前的无碰撞轨迹规划问题,后者指两个机器人抓取同一物体形成闭环后的协调运动控制问题。现在,双机器人协调作业的研究和开发已成为机器人研究领域中重要且具有活力的一个分支。
2、选题目的、意义
本题目以模块化双机器人为研究对象,利用Pro/E和Matlab编程工具,设计开发一套可供双机器人运动学分析的仿真软件,并展开双机器人的运动学的深入研究,提出相关的评价指标体系。通过毕业设计,将所学的专业知识与实际相结合,融合各门课程知识。掌握双机器人模型的建立及其协调操作的基本原理,设计出新型的,具有实用价值的双机器人协调操作仿真系统。同时增强自己综合运用所学知识和技能去分析、解决实际问题的能力,使理论与实践相结合,巩固和发展所学理论知识,提高自己独立思考能力和团结协作的工作作风,促进自己建立严谨的科学态度和工作作风,同时也使自己对所学过的基础
两种并联机器人的机构性能分析与运动控制研究
两种并联机器人的机构性能分析与运动控制研究并联机器人是一种具有多个机械臂、执行器和传感器的机器人系统,具有高精度、高稳定性和高可靠性的特点。
在工业自动化和生命科学等领域,广泛应用于精密操作、装配、搬运等任务。
为了进一步提高并联机器人的机构性能和运动控制精度,研究人员提出了许多创新的方法和算法。
目前,主要有两种并联机器人的机构性能分析与运动控制研究,分别是基于刚性机械臂的并联机器人和柔性物体的并联机器人。
基于刚性机械臂的并联机器人是指机器人系统中,机械臂和执行器由刚性材料构成。
这种机器人通常具有较大的负载能力和较高的运动速度。
在机构性能分析方面,研究人员主要关注并联机器人的刚度、可重复性和精度等指标。
而在运动控制方面,传统的方法包括基于位置控制、速度控制和力控制的算法。
此外,还有许多创新的方法,如基于模型的控制、自适应控制和优化控制等。
柔性物体的并联机器人是指机器人系统中,机械臂和执行器由柔性材料构成,可以适应复杂的非刚性工件。
在机构性能分析方面,研究人员主要关注并联机器人的柔性度、变形能力和稳定性等指标。
而在运动控制方面,传统的方法无法直接应用于柔性机械臂的运动控制。
因此,研究人员提出了许多创新的方法,如基于模型的控制、自适应控制和协调控制等。
在并联机器人的机构性能分析方面,主要包括刚度分析、可重复性分析和精度分析等。
刚度分析是指研究机器人系统在外力作用下的刚度性能。
可重复性分析是指研究机器人系统的姿态误差和姿态精度。
精度分析是指研究机器人系统的位置误差和位置精度。
在机构性能分析的基础上,可以进一步优化机器人的机构参数和设计。
在并联机器人的运动控制研究方面,主要包括位置控制、速度控制和力控制等。
位置控制是指控制机器人系统到达目标位置的控制方法。
速度控制是指控制机器人系统运动速度的控制方法。
力控制是指控制机器人系统对外力的敏感性和响应能力。
在运动控制方面的研究中,可以根据具体任务和要求,选择合适的控制算法和控制策略。
仿人双臂协作机器人设计研究共3篇

仿人双臂协作机器人设计研究共3篇仿人双臂协作机器人设计研究1近年来,随着科技不断发展,机器人技术也日渐成熟。
机器人越来越多地被应用于各个领域,为人们的生产和生活带来了重大变革。
其中,仿人双臂协作机器人可以模拟人类双臂灵活的运动,能够实现更复杂、更精细的工作任务,具有广泛的应用前景。
一、仿人双臂协作机器人的研究现状仿人双臂协作机器人是指由两个或多个机械臂组成的协作机器人系统,具有人类双臂的柔性、精度、稳定性和协调能力。
目前,仿人双臂协作机器人在工业制造、装配、医疗、服务等领域均得到广泛应用。
例如,它能够在汽车生产线上进行车身焊接、喷涂和组装等工作,或在医院中协助医生完成手术操作,或在家庭中协助人们完成日常生活中的各种任务。
仿人双臂协作机器人的设计与研究主要包括机械结构设计、运动学建模与分析、动力学分析与控制等方面。
随着科技的进步,许多国内外学者在这方面进行了大量研究,不断推动着仿人双臂协作机器人的发展。
二、仿人双臂协作机器人的结构设计仿人双臂协作机器人的结构设计是其研究的一个重要方向。
机器人的机械结构设计应该综合考虑其载荷能力、刚度、精度和耐用性等要素。
对于仿人双臂协作机器人,双臂结构是其重要部分,因为这能够保证它能够模拟人类双臂的运动特性。
在双臂结构设计中,主要有两种机械结构:串联机械臂和并联机械臂。
串联机械臂的构造类似于人类的传统机械臂,由多个关节构成。
而并联机械臂则是由多个平行连杆构成,具有更高的刚度和精度。
目前,大多数仿人双臂协作机器人都采用了并联机械臂。
三、仿人双臂协作机器人的运动学建模与分析运动学建模是仿人双臂协作机器人研究的另一个重要方向。
它在机器人控制系统的开发中具有重要的作用,不仅能够为机器人中心控制系统提供基本数据,还可以对工业自动化系统进行有力的设计和开发。
在运动学建模中,对机器人的轨迹规划和轨迹控制是很重要的研究内容。
轨迹规划需要为机器人生成一条满足任务要求的轨迹,而轨迹控制则是使机器人沿指定轨迹运动的过程。
机器人人机协同技术的研究现状

机器人人机协同技术的研究现状随着科技的迅猛发展和生产力的不断提高,越来越多的人类工作被机器人所取代。
但是,机器人并非可以完全替代人类,而是需要与人类进行协同操作。
随着“人机协同”这一概念的提出,人类与机器人之间的关系被重新定义,人机协同技术在企业生产、医疗服务、教育领域、家庭服务等方面得到广泛应用。
机器人人机协同技术 (Human-robot collaboration technology) 是指人类和机器人通过技术的方式进行联合工作,相互完成各自的工作任务,并在过程中进行双向交流和决策。
人机协同技术将人类的判断力、思维能力、创新力与机器人的精确性、稳定性和速度相结合,从而在生产制造、医疗、家庭服务、可持续发展等各个领域实现更高效、更安全和更不易出错的生产和服务。
随着社会的不断发展,机器人日益被广泛应用。
传统机器人一般用于特定的场景下,如在生产制造环节中替代人工完成重复性工作、在军事领域使用等。
但是随着机器人技术的不断提升,新型机器人已经开始出现,对比传统机器人,新型机器人更加智能化、更加灵活化、更加个性化、更加可持续化,并越来越适用于人机协同的场景下。
我们可以根据场景的不同,将人机协同机器人分成以下三类:一、协同型机器人协同机器人可以被简单理解为一种可安全协同工作的机器人,与其共享工作空间、协调协作而不产生危险。
这类机器人通常使用一些传感器和伺服机构,以实现在共享工作空间中保障工作场所内所有人类和机器人的安全。
协同型机器人应用的最大优势就是可以与人类进行协同合作,完成一些人类所不能完成或难以完成的工作任务。
例如,协同型机器人可以被用于在车间中与人类协同工作、同时协调物流系统,运输重物到指定的地点。
另外,协同机器人还可以被用于协同完成一些需要协调操作的工程项目,如施工、建造、大型机械维护等。
二、人形机器人人形机器人(humanoid robots)是一类可以以类似于人类的行为方式和样貌进行工作的机器人,这种机器人是一种可以完成与普通人类互动、沟通的机器人。
双臂机器人协调操作研究

双臂机器人协调操作研究摘要:双臂机器人相比于单臂机器人可以完成更为复杂柔顺的装配任务,可以极大的提高工作空间的利用率,具有良好的应用前景,但前提是两个单臂需要相互协调配合去完成给定任务,因此解决两个操作臂之间的协调问题是双臂机器人设计的重中之重。
本文将面向两种典型装配任务中所遇到的运动协调计算量大、左右臂末端执行机构在作业过程中位姿不确定等问题提出了简单易行的解决方案。
关键词:双臂机器人;实例;协调研究1.双臂机器人协调操作的约束关系1.1约束关系的分类为了实现双臂协调作业任务,双臂机器人两个操作臂之间在时间和空间方面必须满足一定的运动约束条件,需要求双臂机器人在特定的时间以给定的位姿同时到达所装配的位置,约束关系主要分为以下几种。
(1)自由度约束当机器人两个操作臂搬运一刚体时形成了一个闭链结构,其自由度数随着各关节运动的限制而减少,形成闭链结构后双臂机器人自由度数为:n=m1×6-mj×(6-jn)其中,m1为机器人杆件数目;mj为机器人的关节数目;jn为关节自由度数目,一般情况下取1。
(2)工作空间的约束由于要进行协调作业,首先得考虑机器人两个操作臂可以同时到达的工作空间的重复区域,即共同可达空间。
在此区域内,要考虑机器人操作臂之间以及机器人与外界环境的约束关系,对其进行无碰撞规划,在保证操作人员人身安全的前提下准确快速完成作业任务。
(3)点位约束及轨迹约束点位约束即双臂机器人在进行协调装配作业时要求机器人末端执行装置在工作空间内任一给定位置和时间点以某种姿态完成装配作业,点约束描述的为该机器人末端到达该点的约束关系,如位姿、速度以及时间等。
而对于双臂机器人共同搬运一刚体等作业任务时只须机器人末端执行装置保持固定姿态以预定的运动轨迹进行运动,因此只需考虑双臂机器人轨迹之间的约束关系。
(4)力约束双臂机器人作业时末端执行装置必须在物体上施加一定的力才能抓持操作物,一般靠末端装置与操作物之间的摩擦力来抓取物体。
多机器人系统协同任务调度与协作研究

多机器人系统协同任务调度与协作研究摘要:多机器人系统的协同任务调度与协作是当前智能机器人领域中的一个重要研究方向。
随着机器人技术的快速发展和日益广泛的应用,多机器人系统的调度和协作问题变得越来越复杂和关键。
本文将重点探讨多机器人系统的协同任务调度与协作相关的研究进展,并讨论其中的挑战和解决方法。
一、引言多机器人系统的协同任务调度与协作是指在一个任务环境中,多台智能机器人协同工作、协调行动以完成任务的过程。
传统的单机器人系统只能完成简单的任务,而多机器人系统的引入可以大大提高任务的效率和质量。
然而,由于机器人之间的相互作用和协同行为的复杂性,多机器人系统的协同任务调度与协作面临着许多挑战。
二、多机器人系统的协同任务调度多机器人系统的协同任务调度主要包括任务分配和路径规划两个方面。
1. 任务分配任务分配是指将任务分配给适合的机器人执行,以最大化系统的整体效能。
在任务分配中,需要考虑到机器人的能力、工作负载、通信成本等因素,并根据任务的紧急程度和机器人的可用性进行决策。
常用的任务分配算法包括最大化总体收益算法、基于图论的任务分配算法等。
2. 路径规划路径规划是指确定机器人的行动路径,避免碰撞,并保证任务的顺利完成。
在路径规划中,需要考虑到机器人的动态障碍物、环境约束等因素,并使用最优化方法进行路径规划。
常见的路径规划算法有基于状态搜索的算法、基于图搜索的算法等。
三、多机器人系统的协同协作多机器人系统的协同协作主要包括合作控制和通信协作两个方面。
1. 合作控制合作控制是指多台机器人之间的相互作用和协调行动,以实现协同任务的目标。
在合作控制中,需要考虑到机器人之间的相互制约关系、通信延迟等因素,并设计合适的控制算法。
常用的合作控制算法包括集中式控制算法、分布式控制算法等。
2. 通信协作通信协作是指多台机器人之间的信息交换和共享,以促进合作和协同工作。
在通信协作中,需要考虑到通信带宽、通信距离、通信安全等因素,并设计合适的通信协议和通信方式。
多机器人系统的协作研究

多机器人系统的协作研究一、本文概述随着科技的快速发展和的广泛应用,多机器人系统(Multi-Robot Systems, MRS)的研究已经成为机器人技术领域的热点之一。
多机器人系统通过协调多个机器人的行动,以实现单个机器人无法完成的复杂任务,从而提高工作效率、降低能耗、增强系统的鲁棒性和可靠性。
本文旨在对多机器人系统的协作研究进行综述,介绍其基本概念、发展历程、关键技术和应用领域,分析当前的研究热点和挑战,并展望未来的发展趋势。
通过深入研究多机器人系统的协作机制,有助于推动机器人技术的发展,促进在各领域的广泛应用。
在本文中,我们首先将对多机器人系统的基本概念进行阐述,明确其研究范畴和目标。
接着,我们将回顾多机器人系统的发展历程,分析其在不同历史阶段的研究特点和主要成果。
在此基础上,我们将重点介绍多机器人系统的关键技术,包括通信与感知技术、决策与规划技术、协同与控制技术等,并探讨这些技术在多机器人系统协作中的重要作用。
我们还将对多机器人系统的应用领域进行梳理,展示其在工业、农业、医疗、军事等领域的广泛应用前景。
我们将对多机器人系统的研究热点和挑战进行分析,探讨当前研究中存在的问题和难点,并提出相应的解决方案和发展建议。
我们还将对未来的发展趋势进行展望,预测多机器人系统在技术、应用和市场等方面的发展动向。
通过本文的综述和分析,希望能够为从事多机器人系统研究的学者和工程师提供有益的参考和启示。
二、多机器人系统基础多机器人系统(Multi-Robot Systems, MRS)是由多个机器人组成的集合,这些机器人能够协同工作以完成单一机器人难以或无法完成的任务。
MRS的研究和应用涉及多个领域,包括机器人学、控制理论、通信与网络等。
在多机器人系统中,机器人之间的协作是核心问题。
协作的基础在于机器人之间的信息共享和决策协调。
信息共享是指机器人之间通过无线或有线通信交换各自的状态、感知信息和任务执行进度等,从而实现对环境的共同感知和理解。
协同机器人技术的研究现状与应用

协同机器人技术的研究现状与应用近年来,协同机器人技术正在越来越多地被应用于各种工业和服务领域。
随着机器人技术的不断发展和进步,协同机器人技术也在不断走向成熟。
本文将介绍协同机器人技术的研究现状和应用,以及它的前景和挑战。
一、协同机器人技术研究现状协同机器人技术是指在实现任务的过程中,多个机器人之间协同合作,共同完成任务。
它是机器人技术的一种发展方向,由于其具有协同、柔性、高效、精准等特点,使其在工业和服务领域得到广泛应用。
在协同机器人技术的研究中,最主要的问题就是机器人之间的协同和通信。
目前,已经有一些成功的案例,比如在汽车制造中,机器人之间通过无线通信实现协同操作,可以提高工作效率。
而在航空工业中,协同机器人技术可以大大减少人工操作,降低飞机维修成本。
此外,在医疗和服务领域中,协同机器人技术也得到了广泛的应用,比如护理机器人可以为老人提供定期监测和健康状况评估等服务。
二、协同机器人技术的应用1. 工业自动化:协同机器人技术在工业自动化中的应用非常广泛。
机器人之间通过无线通信和数据交换,实现互相协同操作,提高生产效率和质量。
比如在汽车制造中,机器人可以通过协同操作,将各个零部件进行组装,从而提高生产效率和准确性。
2. 智能物流:在物流领域中,协同机器人技术可以大大提高仓储和物流管理效率。
通过机器人之间的协同操作,可以实现货物的快速分拣、存储和提取。
此外,协同机器人也可以保证货物的安全和准确性,大大降低物流成本。
3. 医疗护理:协同机器人在医疗和护理领域的应用也得到了广泛的关注。
比如,护理机器人可以为老人提供定期监测和健康状况评估等服务,同时也可以提供康复护理和生活援助。
4. 其他领域:协同机器人技术还可以应用于农业、房地产和教育等领域。
比如,在农业中,协同机器人可以实现土地管理、种植和收割等操作;在房地产领域中,协同机器人可以实现房屋维护、安保和清洁等工作;在教育领域中,协同机器人可以为教师提供教学辅助服务。
机器人协同工作技术的研究与应用
机器人协同工作技术的研究与应用随着科技的不断发展,机器人在现代社会中扮演着越来越重要的角色。
在工业领域,机器人已经成为许多生产线上最重要的协作工具。
而随着人工智能的发展,机器人将会拥有更加精确的操作能力和更加智能化的协同工作技术。
本文将探讨机器人协同工作技术的研究与应用。
一、机器人协作技术概述机器人协议行为技术是指有两个或多个机器人通过协作行动来完成任务的技术。
机器人协作技术主要包含以下三个方面:1.机器人间的通讯能力:机器人之间需要实现具有双向通讯功能的网络,才能向其它的机器人传递信息,达到协同作业的效果。
2.人机交互的界面:人机交互的界面需要具有交互化、友好化等特性。
3.信息交互的处理:机器人利用传感器采集到的信息及任务规划,在不同的时间和环境下,实现任务的协调与协同。
二、机器人协作技术在工业应用中的情况在现代工业生产过程中,机器人已成为标配。
随着机器人技术的不断发展,机器人间的协作也越来越重要。
以下是机器人在工业领域中的几个典型应用:1.汽车制造在汽车制造中,机器人协同工作可以通过协作完成汽车的组装任务。
不同的机器人可以同时完成汽车的组装工作,实现生产效率的提升。
2.物流仓储机器人协作技术的应用也十分广泛,例如在物流仓储中使用机器人完成货物存放、取放工作等等。
3.食品制造食品制造过程中的材料搬运等任务也可以通过机器人的协同完成,从而保证食品质量的稳定和效率的提升。
4.智能制造智能制造需要机器人配合完成多项任务,包括零件的加工和拼装,以及对生产线的应维护、检修等等。
更加开放并易于维护的机器视觉传感器也能够充分利用这种协同工作。
三、机器人协同技术的新进展随着人工智能和机器人技术的不断发展,机器人协同技术也呈现出了新进展。
以下是机器人协同技术的最新趋势:1.多机器人智能协同在多个机器人之间实现协同工作需要用到多个技术,同时涉及到区分任务和利用不同的技能和性能。
并且还需要实时协商和调整。
机器人之间的沟通能力和自主决策技术是实现多机器人智能协同的两个关键要素。
人机协同技术发展现状与未来趋势分析

人机协同技术发展现状与未来趋势分析在当今科技飞速发展的时代,人机协同技术成为了一个备受关注的领域。
这个领域涉及到人类与机器之间合作的方式,旨在提高工作效率和生活品质。
本文将就人机协同技术的现状以及未来趋势进行分析和探讨。
首先,我们来看一下人机协同技术的现状。
近年来,人工智能和机器学习的快速发展为人机协同技术提供了强大的驱动力。
机器学习算法的不断优化和创新使得机器能够通过学习和模仿人类的行为来实现协同工作。
人工智能技术的发展使得机器具备了更强大的思维和决策能力,从而与人类进行更加智能化和高效的合作。
例如,智能助手能够根据用户的需求和习惯提供个性化的服务和建议,极大地提高了工作效率和用户体验。
其次,我们来分析一下人机协同技术的未来趋势。
可以预见的是,人机协同技术将在未来继续取得长足的进步。
首先,随着人工智能技术的不断突破,机器将具备更加智能化和自主化的能力。
人类与机器之间的合作将变得更加紧密和无缝衔接,甚至可能出现机器具备创造和创新能力的情况。
其次,随着物联网技术的发展,大量的传感器和设备将与人类进行协同工作。
举个例子,智能家居系统能够通过感知用户的行为和需求自动调节房间的温度和照明,提供更加舒适和智能化的居住环境。
再次,虚拟现实技术的进步将使人类能够与机器进行更加真实和沉浸式的合作体验。
人类可以通过虚拟现实设备与机器进行交互,共同完成各种任务和活动。
然而,人机协同技术的发展也面临一些挑战和难题。
首先,随着机器的智能化程度不断提高,安全和隐私问题将变得尤为重要。
机器将需要更加有效地保护用户的隐私信息和个人数据,确保其不被滥用或泄露。
此外,机器的决策和行为可能会出现一些错误和失误,这需要通过合理的规范和监管进行调整和纠正。
另外,人机协同工作可能导致人类的工作岗位被机器所取代。
因此,我们需要思考如何平衡机器的智能化和人类的就业问题,以确保社会的可持续发展。
综上所述,人机协同技术是一项具有重要意义和广阔应用前景的技术。
人机协同系统的发展现状与未来趋势分析
人机协同系统的发展现状与未来趋势分析引言:随着科技的不断进步和人类智慧的发展,人机协同系统的发展已成为当今社会关注的焦点之一。
本文将探讨人机协同系统的发展现状以及未来的发展趋势。
一、人机协同系统的发展现状在当今社会,人机协同系统得到了广泛的应用和发展,涵盖了多个领域。
首先,我们来看看人机协同在医疗领域的应用。
随着大数据和人工智能的兴起,医疗领域的人机协同系统取得了巨大的突破。
通过智能医疗设备和大数据分析,医生可以更准确地诊断疾病并制定个性化的治疗方案,从而提高治疗效果和患者生活质量。
其次,在工业制造领域,人机协同系统也起到了重要的作用。
传统的生产线往往依赖人工操作,生产效率低、质量难以保证。
而现代化的人机协同系统,通过智能化的设备和机器人的应用,加强了生产线的自动化程度,提高了生产效率和产品质量,减少了人力成本。
此外,在农业、交通、金融等领域,人机协同系统也带来了诸多优势。
例如,在农业领域,农民可以通过智能农机和专业的农业数据分析,实现准确的农作物种植和施肥,提高农作物产量。
在交通领域,人机协同系统可以对交通流量进行智能调控,提高交通运输效率,减少交通拥堵。
在金融领域,人机协同可以提供智能化的风险控制和投资建议,为投资者提供更好的服务。
二、人机协同系统的未来趋势在未来,人机协同系统将会继续取得更大的突破和进展。
首先,随着人工智能和机器学习的发展,人机协同系统将会更加智能化和自动化。
人类和机器将实现更深度的融合,机器能够通过学习和分析海量的数据来提供更准确的决策建议。
而人类则可以通过人工智能技术来扩展自己的认知和智慧,实现更高水平的创造力。
其次,人机协同系统将会更加强调人类的主导地位。
尽管机器能够提供智能化的支持和决策建议,但是人类仍然是决策的主体。
人机协同系统的设计将更加注重人类的需求和意愿,人机之间的交互将更加自然和无缝。
此外,人机协同系统的发展还将会关注数据隐私与安全问题。
在人机协同的过程中,大量的个人数据将会被收集和分析。
机器人协作的研究
机器人协作的研究随着机器人技术的不断发展,人们对机器人协作的研究也越来越重视。
研究表明,机器人协作未来将在工业制造、医疗保健、交通运输等领域发挥重要作用。
本文将从机器人协作的定义、应用场景和研究现状三个方面进行探讨。
一、机器人协作的定义机器人协作指的是人类和机器人之间协同工作的过程。
这种协作可以是简单的远程控制,也可以是复杂的交互式合作。
机器人协作可以大大提高人类的工作效率和精度,同时也可以降低工人的劳动强度和工作风险。
二、机器人协作的应用场景机器人协作在制造业、医疗保健、交通运输等领域都有广泛的应用。
在制造业中,机器人可以与人类一起完成生产线上的任务。
例如,机器人可以负责组装、焊接、搬运等工作,而人类可以负责监控和调整工作过程以确保产品质量。
这种协作可以大大提高生产线的效率和灵活性。
在医疗保健领域,机器人可以辅助医生完成手术和诊断。
例如,机器人可以负责剖腹、缝合和清洗手术部位等工作,而医生则可以通过控制机器人完成手术。
这种协作可以提高手术的效率和安全性。
在交通运输领域,机器人可以协助人类驾驶汽车或无人机。
例如,机器人可以负责车辆的自动驾驶、遥控或巡航等任务,而人类则可以负责监控和决策。
这种协作可以提高交通的安全性和效率。
三、机器人协作的研究现状目前,机器人协作的研究主要分为四个方向:协作控制、协作感知、协作规划和协作学习。
首先,协作控制是指如何通过传感器和执行器对机器人进行精细的控制,以实现机器人和人类的协同工作。
研究表明,协作控制是机器人协作的核心技术。
其次,协作感知是指如何让机器人能够感知人类的行为和意图,以便更好地协同工作。
例如,在生产线上,机器人需要感知工人的姿态、动作和语音来实现精确的协作。
第三,协作规划是指如何制定合理的任务分配和路径规划,以实现机器人和人类的协同工作。
例如,在医疗保健领域,机器人需要根据医生的意图规划手术步骤和路径,以达到理想的手术效果。
最后,协作学习是指如何通过数据分析和机器学习来提高机器人和人类的协同工作效率和精度。
机器人控制中的多机协同技术研究
机器人控制中的多机协同技术研究随着科技的不断发展和机器人技术的日益成熟,机器人的应用场景越来越广泛。
在实际应用中,通常需要多台机器人同时协同工作才能完成复杂任务。
机器人控制中的多机协同技术研究,旨在解决机器人之间的协调与合作问题,提高工作效率和任务完成能力。
多机协同技术的研究包括多方面内容,如分布式控制、路径规划、协调调度等。
其中,分布式控制是关键的研究领域之一。
在分布式控制中,每台机器人都具备一定的智能决策能力,能够独立地完成一部分任务,并与其他机器人进行信息交流和协调。
通过合理的任务分配和资源利用,多台机器人可以以协同的方式进行工作,提高整体的效率。
路径规划是多机协同技术中的另一个重要环节。
多机器人在共同工作时,需要规划合适的路径以避免碰撞和冲突。
在路径规划中,研究者通常会考虑多个因素,如环境地图、机器人之间的通信状况、任务优先级等。
通过综合考虑这些因素,可以使机器人之间避免碰撞,并达到最优的路径规划结果。
除了分布式控制和路径规划外,协调调度也是多机协同技术中的关键问题。
在多机器人系统中,如何合理地分配任务和资源,使每个机器人发挥最大的作用,是一个需要解决的难题。
协调调度不仅涉及到任务的分配,还包括机器人之间的协作与信息交流。
通过合理的协调调度策略,可以减少机器人之间的竞争和冲突,提高整体系统的效能。
在多机协同技术研究中,还有一些其他的问题需要解决。
例如,机器人之间的通信问题、机器人之间的定位与定位精度、机器人之间的协作算法等。
这些问题的解决需要跨学科的研究和合作,如机器人技术、通信技术、自动控制技术等。
同时,多机协同技术在实际应用中具有广阔的前景。
例如,工业生产中的自动化生产线,多机器人可以协同完成各项任务,提高生产效率和产品质量。
在医疗领域,多机器人可以协同进行手术操作,提高手术的安全性和准确度。
此外,多机器人还可以应用于救援任务、科学探索、仓储管理等众多领域,为人们的生活带来更多便利和效益。
机器人协作控制技术的研究与应用
机器人协作控制技术的研究与应用一、引言如今,机器人已经不再是科幻中的产物,而是已经在各个领域广泛应用。
机器人的智能化和自主性是其最显著的特点。
然而,一台机器人往往无法完成某些特殊任务,需要多台机器人协作完成。
机器人协作控制技术的研究和应用是当今研究的前沿。
二、机器人协作控制技术的研究现状1.协作控制策略的研究机器人协作需要一个有效的协作控制策略,以确保每个机器人都知道自己的任务,同时保证整个系统的一致性和协调性。
当前主要的协作控制策略有两种,一种是基于手动规划的策略,另一种是基于自主学习的策略。
前者需要专业的规划人员,而后者则利用机器学习算法,自主学习合适的协作控制策略。
2.协作规划的研究协作规划是为多个机器人协同完成任务设计程序的过程。
该过程中需要考虑多个机器人间的通信和协作,保证整个协作系统的稳定和高效运行。
当前,研究人员主要采用分布式规划和集中式规划两种方法进行研究。
3.协作控制器的研究协作控制器是机器人协作控制系统中最核心的组件之一。
它能够实现多个机器人的通信和协调,以及对整个协作系统的运行状态进行监测和调节。
当前,研究人员主要采用分层控制和遗传算法两种方法进行研究。
三、机器人协作控制技术的应用领域1.工业制造领域在工业制造领域,机器人协作能够提高生产效率,降低人工成本,减少错误率。
例如,在汽车制造过程中,多个机器人可以协同完成车身的焊接、上漆等工作。
2.农业领域机器人协作技术对于农业领域的应用也具有广泛的前景。
例如,在果园、葡萄园等场景中,利用多个机器人协作完成果实采摘、果园巡视等工作,可以提高采摘效率,减轻劳动强度。
3.医疗卫生领域在医疗卫生领域,机器人协作能够协助医生完成手术、给药等操作,提高手术的精度和效率。
例如,手术中需要使用不同的机器人完成不同的操作,各个机器人之间需要协作完成整个手术的流程。
四、机器人协作控制技术的未来展望目前,机器人协作控制技术仍处于不断发展的初级阶段。
随着科技的不断进步和研究上的不断深入,机器人协作控制技术将会得到进一步的推广和应用。
多机器人协作技术研究

多机器人协作技术研究1. 引言多机器人系统是指由多个机器人协同工作完成特定任务的系统。
随着机器人技术的快速发展,多机器人协作技术的研究也日益受到重视。
本文将深入探讨多机器人协作技术的研究现状和发展趋势,以及其在不同领域中的应用。
2. 多机器人协作的研究现状2.1 协作架构多机器人系统的协作架构是实现机器人间交流和合作的基础。
目前常见的协作架构包括集中式、分布式和混合式架构。
集中式架构将所有决策集中在一个主机上,适用于任务简单且机器人间协作较少的情况;分布式架构将决策分散在每个机器人上,适用于任务复杂且机器人间需要高度合作的情况;混合式架构则是将集中式和分布式架构相结合,兼顾了灵活性和效率。
2.2 协作策略多机器人的协作策略是指机器人在协作过程中如何分配任务和资源、如何协调行动。
常见的协作策略包括集中式、分布式和分工协作。
集中式协作策略指由一个机器人负责任务分配和资源调度,并在实时监控下进行协调;分布式协作策略则将任务分配和资源调度分散到每个机器人上,互相独立地工作;分工协作策略则将任务按照不同机器人的特长进行分工,提高整体效率。
2.3 通信与定位多机器人系统的通信与定位是实现机器人间协作和合作的关键。
常见的通信方式包括无线通信、基于互联网的通信和基于中继的通信;常用的定位方式包括全球定位系统(GPS)、惯性导航系统和环境标记等。
通信与定位的准确性和实时性对多机器人协作的成功至关重要。
3. 多机器人协作技术的发展趋势3.1 人工智能与机器学习人工智能和机器学习的发展为多机器人协作技术提供了新的发展机遇。
通过构建智能的机器人控制系统,机器人可以自主地进行决策和学习,提高协作效率和灵活性。
例如,通过强化学习算法,机器人可以自主学习任务分配和资源调度策略,以应对复杂的任务环境。
3.2 感知与认知多机器人系统的感知与认知是实现对环境的理解和决策的基础。
随着感知技术的不断进步,机器人可以通过传感器获取更加精确和全面的环境信息。
多机器人协调任务完成算法研究

多机器人协调任务完成算法研究随着科技的不断发展,机器人已经越来越普及,成为了现代生活中不可或缺的一部分。
机器人的出现不仅减轻了人类的负担,同时也为人们提供了更加便捷的服务与体验。
然而,随着机器人越来越多的运用于生产与服务中,如何让多台机器人协调完成一项任务也成为了一个大问题。
本文将探讨多机器人协调任务完成算法研究。
一、多机器人协同问题在多机器人协同问题中,几台机器人可以共同执行一个任务,也可以执行不同的任务。
然而,机器人之间的协作需要经过复杂的协调过程,如何使机器人能够实现有序的协作是一个难点。
二、多机器人协同问题的解决思路目前,解决多机器人协同问题的算法主要有以下几种:1.集中式算法集中式算法是将所有的机器人任务和协调都交给集中的计算机来处理。
这种算法的好处是计算机可以实时监控所有机器人的情况和进度,对机器人的协调可以更加精准和高效。
但缺点也很明显,如果集中计算机崩溃,整个系统将无法运作。
2.分布式算法分布式算法是将任务分配给不同的机器人处理,每台机器人能够独立完成自己的任务,而且还可以和其他机器人共同完成整个系统的目标。
这种算法的好处是可以保持系统的可扩展性和灵活性,同时还能够避免单点故障。
但是这种算法的实现相对复杂,需要考虑如何分配任务和如何协调。
3.混合算法混合算法相当于是将集中式算法和分布式算法相结合。
将任务分配给不同的机器人处理,而集中计算机会监控这些机器人的进度和情况,实现任务的协调和调度。
这种算法结合了两种算法的优点,能够提高系统的效率和可靠性,但是实现起来也较为困难。
三、多机器人协同问题的实践应用多机器人协同问题的解决已经被广泛应用于工业和服务领域。
例如,制造业领域需要高效地协调机器人完成产品加工、运输和包装等任务;在服务领域,机器人需要配合完成清洁、配餐和配送等任务。
而在医疗领域,机器人也可以协同完成手术、治疗和诊断等任务。
四、多机器人协同问题的未来展望在未来,多机器人协同问题将会越来越重要。
机器人协作技术的协调性改进

机器人协作技术的协调性改进近年来,机器人技术的快速发展为各行各业带来了许多机遇和挑战。
机器人的协作应用逐渐扩展,为人们的生活和工作带来了便利与效率。
然而,由于机器人之间的协调问题,其协作效果有时还不够理想。
本文将探讨机器人协作技术的协调性改进,旨在进一步提高机器人协作的效能。
一、机器人协作技术的背景和现状随着人工智能和机器人技术的飞速发展,现代工业和服务行业中出现了越来越多的机器人应用场景。
例如,在生产线上,机器人能够协同完成一系列复杂的操作,极大地提高了生产效率。
在医疗领域,机器人协助医生进行手术,减少了手术风险,提高了手术的成功率。
在家庭中,智能机器人能够代替人们完成一些简单的家务事务,减轻了人们的负担。
然而,机器人协作技术在实际应用中仍然存在一些挑战。
首先,机器人之间的协调能力有限,往往难以进行高效的合作。
其次,机器人可能存在着误操作、冲突以及无法处理的异常情况,这些问题都会影响到协作效果。
因此,如何改进机器人协作技术的协调性成为了一个迫切的问题。
二、机器人协作技术的协调性改进方法为了提高机器人协作的协调性,我们可以采取以下一些方法:1. 优化传感器技术:传感器是机器人获取外界信息的重要手段。
通过对传感器的优化和改进,可以使机器人更准确地感知周围环境,进而更好地协同工作。
例如,采用更先进的视觉传感器和激光传感器,可以提高机器人在复杂环境下的定位和避障能力。
2. 强化学习算法:强化学习是一种通过与环境交互来学习行为策略的方法。
通过将强化学习算法应用于机器人协作中,可以使机器人能够根据反馈不断调整自己的行为,实现更优秀的协作效果。
例如,可以使用深度强化学习算法来训练机器人在复杂场景中进行协作,提高机器人的决策能力。
3. 引入协同规划算法:协同规划算法可以使机器人在协作过程中更加有效地规划和协调自己的行动。
通过建立机器人之间的协同规划模型,可以实现机器人之间的任务分配、路径规划和资源分配等功能。
双机器人协调运动的研究现状
双机器人协调运动的研究现状摘要:双、多机器人协调运动、协调作业一直是国际机器人技术中的研究热点。
对双机器人协调运动基础和双机器人力学协调运动的研究现状进行了阐述,包括双机器人坐标系标定、双机器人协调运动、双机器人简化建模和包围盒技术、双机器人力反馈控制方法、协调搬运中的力学协调控制技术以及轴孔装配中的力学控制技术等6个方面,并提出总结和展望。
关键词:双机器人;轨迹规划;坐标系标定;简化建模;H动化双、多机器人协调运动、协调作业一直是国际机器人技术中的研究热点。
随着世界机器人使用量和需求量的大幅增加,复杂作业、智能作业的要求不断增多,这就使得研究双机器人的协调作业成为了重中之重。
我国从20世纪70年代末开始研究机器人技术以来,机器人得到了广泛应用,涉及最多的是搬运与上下料领域,其次是焊接领域,以及拆卸与装配领域。
相比于单机器人,双机器人工作空间更大,载重能力和刚性更优,适应性更强。
本文以双机器人为基础,论述其协调运动的研究现状。
1双机器人协调运动基础1.1双机器人的运动学路径规划多机器人协调运动最大的难点在于多机器人形成闭链的系统中的冗余度控制和运动受限问题[1]。
简言之,多机器人协调运动最关键的问题是解决机器人之间的协调一致。
关于双机器人运动学路径规划,目前国内的研究成果不多。
Y. H. Gan 等在定义了协调跟随运动和叠加运动的基础上,提出了一种基于双机器人协调焊接和搬运的示教方法[2],同时提出了根据主机器人末端轨迹确定从机器人运动路径的方法。
华南理工大学的欧阳帆等[3]针对双机器人对称位置镜像作业的协调运动,提出了一种新的轨迹规划方法,并通过一个双机器人协调镜像圆弧运动实验,论述了方法的有效性,这也是主从式的路径规划方法。
王郑拓等[4]针对手动液压搬运车车架的主焊工序,建立了一种基于人工蜂群算法的双机器人同步焊接数学模型,通过引入虚拟点、选用换位表达编码方式简化了数学模型,并成功进行了仿真验证。
人机协调运动控制方法研究现状与关键技术分析

总615期第7期2017年7月河南科技Henan Science and Technology人机协调运动控制方法研究现状与关键技术分析岳海波(郑州机电工程研究所,河南郑州450015)摘要:人机协调运动控制方式是指实现与人动作相协调的机器人动作控制方式。
在日常生活中,人与人合作搬运是比较常见的,但是人的机械强度有限,无法完成超过极限的负载搬运。
因此,为了充分发挥人与机器人的优势,提出人机合作助力方式,延伸到外骨骼系统,它们有一个共同的特点就是人与机器人在运动过程中一直处于接触状态。
人机协调运动控制方法主要包括负荷分配控制、阻抗控制、直接力控制、智能控制等。
关键词:机器人;人机协调;运动控制中图分类号:TP242文献标识码:A文章编号:1003-5168(2017)07-0042-03 Research Advances and Key Technology Analysis ofMan-machine Coordinated Motion ControlYue Haibo(Zhengzhou Institute of Mechanical and Electrical Engineering,Zhengzhou Henan450015)Abstract:Man-machine coordinated motion control is a kind of robot motion control mode which is coordinated with human motion.In daily life,It is common of people to cooperate with others,but human mechanical strength is limit⁃ed,unable to complete load handling beyond their limits,so in order to achieve full advantages of human and robot, the method of man-machine cooperation is proposed,applied to the exoskeleton system,these man-machine coopera⁃tion systems have a common characteristic is that people and robots is in contact in the process of movement.The man-machine coordinated motion control method mainly includes load distribution control,impedance control,direct force control,intelligent control,etc.Keywords:robot;man-machine coordinated;motion control随着机器人技术的创新与发展,机器人的工作模式由单独完成简单任务逐渐转变为人机协作完成复杂任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
双机器人协调运动的研究现状双机器人协调运动的研究现状杨明钊,陈君若(昆明理工大学机电工程学院,云南昆明650500) 摘要:双、多机器人协调运动、协调作业一直是国际机器人技术中的研究热点。
对双机器人协调运动基础和双机器人力学协调运动的研究现状进行了阐述,包括双机器人坐标系标定、双机器人协调运动、双机器人简化建模和包围盒技术、双机器人力反馈控制方法、协调搬运中的力学协调控制技术以及轴孔装配中的力学控制技术等6个方面,并提出总结和展望。
关键词:双机器人;轨迹规划;坐标系标定;简化建模;自动化双、多机器人协调运动、协调作业一直是国际机器人技术中的研究热点。
随着世界机器人使用量和需求量的大幅增加,复杂作业、智能作业的要求不断增多,这就使得研究双机器人的协调作业成为了重中之重。
我国从20世纪70年代末开始研究机器人技术以来,机器人得到了广泛应用,涉及最多的是搬运与上下料领域,其次是焊接领域,以及拆卸与装配领域。
相比于单机器人,双机器人工作空间更大,载重能力和刚性更优,适应性更强。
本文以双机器人为基础,论述其协调运动的研究现状。
1 双机器人协调运动基础 1.1 双机器人的运动学路径规划多机器人协调运动最大的难点在于多机器人形成闭链的系统中的冗余度控制和运动受限问题[1]。
简言之,多机器人协调运动最关键的问题是解决机器人之间的协调一致。
关于双机器人运动学路径规划,目前国内的研究成果不多。
Y.H.Gan等在定义了协调跟随运动和叠加运动的基础上,提出了一种基于双机器人协调焊接和搬运的示教方法[2],同时提出了根据主机器人末端轨迹确定从机器人运动路径的方法。
华南理工大学的欧阳帆等[3]针对双机器人对称位置镜像作业的协调运动,提出了一种新的轨迹规划方法,并通过一个双机器人协调镜像圆弧运动实验,论述了方法的有效性,这也是主从式的路径规划方法。
王郑拓等[4]针对手动液压搬运车车架的主焊工序,建立了一种基于人工蜂群算法的双机器人同步焊接数学模型,通过引入虚拟点、选用换位表达编码方式简化了数学模型,并成功进行了仿真验证。
1.2 双机器人系统坐标系标定机器人坐标系的标定是保证精度的重要技术。
以六自由度机器人为例,其主要涉及4个方面的坐标系标定:工件坐标系、工具坐标系、本体坐标系和双机器人极坐标系。
通过使用三坐标测量仪、单/双目摄像机和激光仪等设备,获取标定矩阵来完成坐标系标定。
目前,在双机器人坐标系标定中有如下几种常用方法。
1)辅助工作台法。
通过辅助工作台,用成熟的单机器人标定方法对2台机器人进行标定,获取它们相对于工作台的位姿转换矩阵,利用该矩阵与基坐标系转换矩阵间的数学关系,算出双机器人基坐标系之间的位姿变换矩阵,从而标定出双机器人的基坐标系[5]。
张文增等提出的这种方法,思路简单清晰,但计算量较大。
2)辅助工具法。
该方法类似于辅助工作台法,辅助工具法利用视觉摄像机或者其他物理标定工具来进行双机器人的坐标系标定。
在苏剑波[6]提出的方法中,先要在机器人末端安装好标定盘;然后使用标定设备,以获得相对位姿变换矩阵;再计算双机器人闭链中的唯一未知矩阵,便可获得基坐标系转换矩阵,从而进行标定。
国外学者J.Fraczek 等[7]利用辅助工作台法的思想,结合辅助工具法,利用电子经纬仪对2台机器人的基坐标系标定和测量,并建立了2台机器人的基坐标系原点与世界坐标系原点之间的数学关系,实现了对双机器人的坐标系标定。
3)三点几何法。
三点几何法是由唐创奇等[8]提出。
他用几何学中三点确定圆心的方法,来确定位姿转换矩阵;但唐创奇等在文中只将该方法应用在了变位机与机器人的坐标系标定中,并未对双机器人使用。
4)辅助工件配合法。
Y.L.Huang等进一步整合辅助工具法和辅助工作台法,提出利用轴孔配合来标定双机器人坐标系[9]。
他通过在2台机器人末端分别装入轴、孔辅助工件(已知尺寸),来求得双机器人坐标系间的位姿转换矩阵。
该方法最大的优点是由于已知轴孔的配合使得末端相对位姿不变,故而末端的位姿转换矩阵不变,且成为已知量。
这极大地简化了在闭式运动链中求出双机器人之间的位姿变换矩阵的难度。
1.3 双机器人简化建模与包围盒技术机器人模型的简化通常是为了获得满足精度要求的机器人的几何特征,从而解决多机器人协调作业中存在的碰撞问题。
包围盒技术是用简单的几何特性近似的描述机器人的结构(机器人关节和末端),通过构造树状层次来逼近最真实的机器人几何模型。
模型被简化后,就可以更简单地计算距离和检测碰撞了。
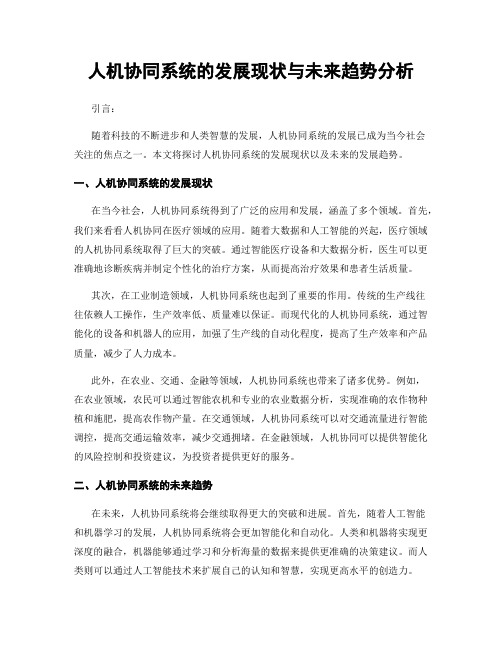
目前,主要的几何模型简化方法有长方体简化法,圆柱圆顶简化法,内、外嵌球体群简化法和椭球体简化法(见图1)。
图1 几种简化建模方法1)长方体简化法。
该方法以长方体为主要模型,有时还会根据情况使用多面体简化。
这种简化模型的精度很高,但是对于复杂的机器人表面结构的逼近难度大,且计算量庞大。
长方体包围盒建模技术,主要包括了平行轴包围盒、有向包围盒和多面体离散包围盒等3类。
其中,平行轴包围盒法对机器人的包围不紧密,多用于双机器人最外层的初级碰撞检测[10]。
S.Gottschalk等[11]在有向包围盒方法的基础上,添加了树形结构,以及J.Klosowski等使用新的K-DOP包围盒,使原本不紧密的包围盒变得更加紧密[12]。
其中,有向树形包围盒应用最广。
而针对有向包围盒,Z.G.Fang等[13]提出了更为有效、更为快速的内嵌式有向包围盒方法。
其外层使用平行轴包围盒,内层使用有向包围盒,既精确地逼近机器人结构,又提升了运算速度。
2)圆柱圆顶简化法。
该方法是以圆柱和半球体圆顶为主要的简化模型,其建模简单,也能较好地表达机器人的结构,且由于半径相同,故计算量不大;但其在笛卡尔坐标系中较难表达机器人的位姿。
C.Chang等于1988年首次提出该方法[14] ,之后被 B.Cao等[15]和P.Bosscher等[16] 继承并发展。
3)内、外嵌球体群简化法。
该方法以球体为主要的简化模型,通过球体的内、外嵌所形成的球体群,来表达机器人的结构特点。
球体群简化法公式简单且无需考虑方向变化,这是球体自身特点决定的。
在计算碰撞距离时,只需要知道球半径参数R,即可求出球体距离,非常简便。
在球体群简化建模中,最先出现的是单球体的建模,单球体后被指出对包围空间的浪费。
于是S.Quinlan便提出使用一群球体组成的外嵌球体群来表达机器人结构[17],这样既可以更精确地逼近结构,又节约了包围空间;但是无可避免地增大了运算量。
为了减小运算量,A.P.Pobil等使用内嵌式的球体群简化法,即内嵌3层半径不同的球体来表达结构[18-19]。
在进行碰撞检测时,先检测最大半径的最外层(第1层)球体能否避碰,若未通过,则进行第2层球体碰撞检测,以此类推,直到3层内嵌球体全部发生碰撞,则认为碰撞成立;相反,若第1层或第2层球体模型未发生碰撞,则不再对下一层的球体模型进行计算,这样就解决了用球体群简化法所带来的计算量扩大的问题。
4)椭球体简化法。
该方法可以理解为圆柱圆顶简化法与球体群简化法的结合。
椭球体既避免了内嵌式球体群建模所产生的包围空间浪费的问题,也发挥了圆柱圆顶简化法的直观性;但因为椭球体是复杂的空间几何体,在计算碰撞距离时会相当复杂,这使得椭球体简化法虽然建模效果好,可计算量和难度颇高。
为了让椭球体简化法的难度下降,K.S.Hwang等[20]利用高斯投影分布来对模型进行投影而不进行力学计算。
当全部投影都重叠时,则认定碰撞。
2 双机器人力学协调运动 2.1 双机器人力反馈控制方法双机器人力学协调运动是通过机器人的力反馈来实现的。
目前,力反馈控制的基本方法有关节的力矩控制和关节的位置控制。
关节的力矩控制是在得到机器人末端的力矩大小后,通过雅可比转置矩阵计算所得到的关节空间力矩,来驱动关节电动机,产生期望的力矩,以控制机器人。
关节的位置控制是在求出机器人末端的力与位置误差后,通过雅克比逆矩阵、逆运动学求解角位移或角速度来控制电动机,并产生规定的位移和角速度。
在基于这2种力学反馈控制方法上,众多学者还加入了诸如自适应算法等的智能算法。
比如T.D.Murphey等采用了自适应控制算法,保证双机器人在未知环境中协调作业的鲁棒性[21];T.Anand等[22]利用力反馈信号的置信度,让双机器人能够“自主”选择主机器人或是副机器人模式。
2.2 协调搬运中的力学控制技术机器人的力学协调运动基于主从式的力学协调搬运是最先开始发展的课题。
主从式即先设定主机器人的轨迹,从机器人跟随运动并通过力反馈来随时修正跟随轨迹。
这种主从式协调拥有两大缺点:一是由于从机器人只是跟随运动,存在时间延迟;二是没有反应真实的载荷分布[23]。
M.Uchiyama等指出,如果在原有的主从式协调基础上,加入物体的动力学方程控制,会提升控制效果[24]。
为了得到物体的动力学数据,他在每个机器人的末端关节都安装了力传感器,实现了控制效果的提升。
为了解决物体动力学的复杂求解过程,R.G.Bonitz等提出并实现了一种增加了阻抗控制的无需求解物体动力学的力学控制方法[25]。
该方法通过增加阻抗控制,让机器人末端的力传感器反馈来补偿物体动力学信息;然后使用柔顺关系对轨迹进行修正;最后指导位置控制器进行机器人的控制。
该方法在双机器人协调搬运箱子的作业中得以验证。
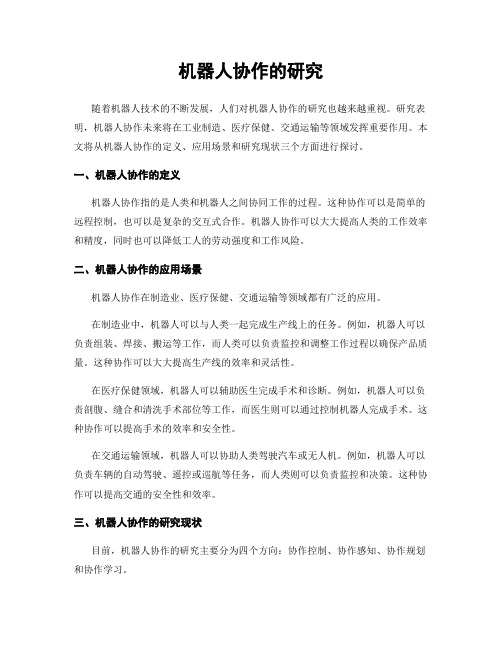
2.3 轴孔装配中的力学控制技术在机器人协调轴孔装配中,Bouffard-Vercelli Y等[26]使用了混合控制方法(见图2),其设定轴孔的插入方向保持垂直,并使用位置控制方法控制轴孔的轴向运动,使用力学控制方法控制径向运动。
图2 双机器人协调轴孔装配Y.F.Zheng等提出了一种基于腕力传感器和阻抗控制方法的双机器人同步装配方法[27]。
该方法要求2台机器人都要安装腕力传感器,并使用阻抗控制腕力传感器反馈,对2台机器人的位置和姿态进行同步调整。
3 结语无人化工业生产的前提就是双机器人、多机器人能够顺利地协同作业,故研究双机器人的协调运动有着非常重要的意义。
尤其是在协同作业的控制方法上,一定存在着除了主从式之外的协同作业控制方法。
在双、多机器人的避碰路径规划中,简化建模是非常重要的底层技术,未来也将出现更简单、更精确的逼近方法。
机器人的力学控制相比其他控制方法具有更好的直观性质,在随后的机器人发展中,会出现越来越多的力学控制方法,更多的运用在搬运、装配和焊接等各个领域。
总而言之,为了适应更加复杂和更加流畅的一体化、自动化生产要求,双机器人、多机器人协同作业将会成为新的热门的研究方向,也将会成为工业发展中重要的里程碑。
参考文献:[1] 欧阳帆. 双机器人协调运动方法的研究[D]. 广州:华南理工大学, 2013. [2] Gan Y H, Dai X. Kinematic cooperation analysis and trajectory teaching in multiple robots system for welding[C]//IEEE 16th Conference on Emerging Technologies & Factory Automation (ETFA).Piscataway:IEEE Press,2011. [3] 欧阳帆, 张铁. 双机器人协调镜像对称运动的路径规划[J]. 高技术通讯,2013(9):880-884. [4] 王郑拓, 冯振礼, 叶国云, 等. 基于人工蜂群算法的双机器人路径规划分析[J]. 焊接学报,2015(2):97-100. [5] 张文增, 陈强, 孙振国, 等. 弧焊机器人工件坐标系快速标定方法[J]. 焊接学报, 2005(7):1-4. [6] 苏剑波. 双机器人系统的基坐标系标定[J]. 控制理论与应用, 1998(4):575-582. [7] Fraczek J, Busko Z. Calibration ofmulti-robot system without and under load using electronictheodolites[C]// Proceedings of the First Works hop on Robot Motion and Control. Piscataway:IEEE Press, 1999. [8] 唐创奇, 孟正大. 弧焊机器人与变位机协调运动的实现[J]. 工业控制计算机, 2008(1):47-49. [9] Huang Y L, Li M, Lu W, et al. Calibration of two cooperative manipulators viapseudo-closed-loop method[C]// IEEE International Conference on Systems, Man, and Cybernetics. Piscataway:IEEE Press, 1996. [10] Ehmann S A, Lin M C. Accelerated proximity queries between convex polyhedra by multi-level V oronoi marching[C]//Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press, 2000.[11] Gottschalk S, Lin M C, Manocha D. OBB Tree A hierarchical structure for rapid interference detection[C]// Proceedings of the ACM SIGGRAPH Conference on Computer Graphics. Piscataway:IEEE Press, 1996. [12] Klosowski J, Held M, Mitchell J, et al. Efficient collision detection using bounding volume hierarchies of k-dops[J]. IEEE Transactions on Visualization and Computer Graphics, 1998,4(1):21-37. [13] Fang Z G, Jiang J, Xu J, et al. Efficient collision detection using bounding volume hierarchies of OBB-AABBs and its application[C]//International Conference on Computer Designand Applications (ICCDA). Piscataway:IEEE Press, 2010.[14] Chang C, Chung M J, Bien Z. A collision-free motion planning for two robot arms using minimum distance functions[C]//IEEE International Workshop on Intelligent Robots. Piscataway:IEEE Press, 1988. [15] Cao B, Dodds G I, Irwin G W. Implementation of time-optimal smooth and collision-free path planning in a two robot arm environment[C]//Proceedings of IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 1995. [16] Bosscher P, Hedman D. Real-time collision avoidance algorithm for robotic manipulators[C]//IEEE International Conference on Technologies for Practical Robot Applications. Piscataway:IEEE Press, 2009. [17] Quinlan S. Efficient distance computation between non-convexobjects[C]//Proceedings of IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 1994. [18] Pobil A P, Sema M A, Lovet J. A new representation for collision avoidance and detection[C]// Proceedings of IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 1992. [19] Pobil A P, Perez M, Martinez B. A practical approach to collision detection between general objects[C]//Proceedings of IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 1996. [20]Hwang K S, Ju M Y, Chen Y J. Speed alteration strategy for multijoint robots in co-working environment[J]. IEEE Transactions on Industrial Electronics, 2003,50(2):385-393.[21] Murphey T D, Horowitz M. Adaptive cooperative manipulation with intermittent contact[C]//IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 2008. [22] Anand T, Ye G, Sheng W. Using human motion estimation for human-robot cooperative manipulation[C]// IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press, 2011. [23] Kosuge K, Ishikawa J, Furuta K, et al. Control of single-master multi-Slave manipulator system using VIM[C]//Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 1990. [24] Uchiyama M, Dauchez P. A symmetric hybrid position/force control scheme for the coordination of two robots[C]//Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 1988. [25] Bonitz R G, Hsia T C. Robust dual-arm manipulation of rigid objects via palm grasping-theory and experiments[C]// Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 1996. [26] Bouffard-Vercelli Y,Dauchez P, Delebarre X. Force-controlled assembly with atwo-arm robot: How and where to perform it within the workspace[C]//Proceedings of the 1993 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway:IEEE Press, 1993. [27] Zheng Y F, Sias F. Two robot arms in assembly[C]// Proceedings of the IEEE International Conference on Robotics and Automation. Piscataway:IEEE Press, 1986. 责任编辑马彤Research Status of Double Robot Coordinated Motion YANG Mingzhao, CHEN Junruo (Faculty of Mechanical and Electrical Engineering, Kunming University of Science and Technology, Kunming 650500, China) Abstract:Describe the research status of double robot coordinated motion with backdrop of a large number of robots used in industry. Elaborate the theoretical basis and mechanical control of the double coordinate motion. The research includes the robot coordinate system calibration, double robot coordinated motion and its simplified model, force feedback control method of double robot, technology of coordination and control about mechanical handling method, and assembling shaft with holes. Propose the summary and outlook in the end of paper. Key words:double robot, trajectory planning, coordinate system calibration, simplified model, automation 中图分类号:TP 24文献标志码:A 作者简介:杨明钊(1991-),男,硕士研究生,主要从事双机器人协调运动、机器人与变位机协调运动等方面的研究。