Windows CE环境下的变量施肥控制系统研究
自动变量施肥机控制系统研究(二)
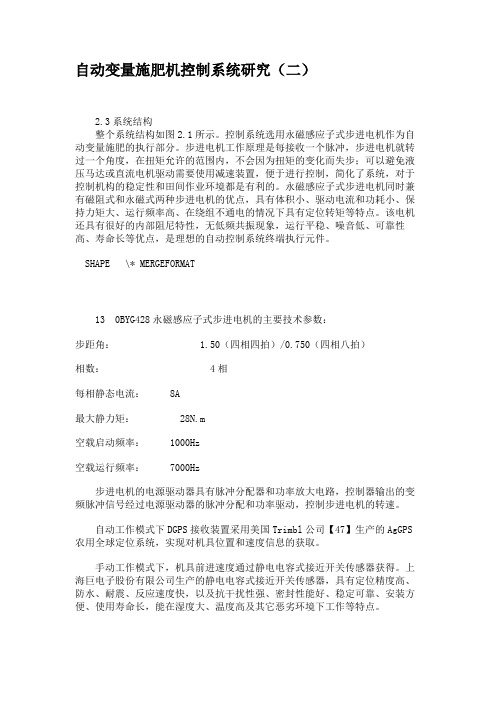
自动变量施肥机控制系统研究(二)2.3系统结构整个系统结构如图2.1所示。
控制系统选用永磁感应子式步进电机作为自动变量施肥的执行部分。
步进电机工作原理是每接收一个脉冲,步进电机就转过一个角度,在扭矩允许的范围内,不会因为扭矩的变化而失步;可以避免液压马达或直流电机驱动需要使用减速装置,便于进行控制,简化了系统,对于控制机构的稳定性和田间作业环境都是有利的。
永磁感应子式步进电机同时兼有磁阻式和永磁式两种步进电机的优点,具有体积小、驱动电流和功耗小、保持力矩大、运行频率高、在绕组不通电的情况下具有定位转矩等特点。
该电机还具有很好的内部阻尼特性,无低频共振现象,运行平稳、噪音低、可靠性高、寿命长等优点,是理想的自动控制系统终端执行元件。
SHAPE \* MERGEFORMAT13 0BYG428永磁感应子式步进电机的主要技术参数:步距角: 1.50(四相四拍)/0.750(四相八拍)相数: 4相每相静态电流: 8A最大静力矩: 28N.m空载启动频率: 1000Hz空载运行频率: 7000Hz步进电机的电源驱动器具有脉冲分配器和功率放大电路,控制器输出的变频脉冲信号经过电源驱动器的脉冲分配和功率驱动,控制步进电机的转速。
自动工作模式下DGPS接收装置采用美国Trimbl公司【47】生产的AgGPS 农用全球定位系统,实现对机具位置和速度信息的获取。
手动工作模式下,机具前进速度通过静电电容式接近开关传感器获得。
上海巨电子股份有限公司生产的静电电容式接近开关传感器,具有定位精度高、防水、耐震、反应速度快,以及抗干扰性强、密封性能好、稳定可靠、安装方便、使用寿命长,能在湿度大、温度高及其它恶劣环境下工作等特点。
自动变量施肥控制系统中,步进电机电源驱动器需要80V电压。
将一个12V的蓄电池通过逆变器将电源转变为220V交流电,然后通过变压器可以得到80V电压。
也可以将电源线直接连接到拖拉机的发电机上,得到控制系统所需电源。
变量施肥自动控制技术的研究现状与发展趋势
变量施肥自动控制技术的研究现状与发展趋势变量施肥自动控制技术是一种通过自动化技术实现精密施肥的技术。
它可以实现对不同区域、不同植株、不同生长阶段的植物进行精准施肥控制,优化施肥方案,避免施肥浪费,提高作物产量和品质。
此技术自问世以来,已得到广泛关注和应用,但该技术也面临着一些问题和挑战。
本文将分析变量施肥自动控制技术的研究现状、存在的问题以及未来发展趋势。
当前,变量施肥自动控制技术的研究重点主要集中在以下方面:1. 基于决策模型的精准施肥控制决策模型是变量施肥自动控制技术的核心。
通过建立决策模型,可以分析不同植株、不同区域、不同生长阶段的营养需求、吸收能力等因素,从而实现精准施肥。
目前决策模型主要采用神经网络、模糊理论、遗传算法等方法,但仍需要不断进行完善和优化。
2. 传感器技术的应用传感器技术是变量施肥自动控制技术的重要组成部分,通过传感器可以实时监测土壤、植株、环境等信息,准确掌握作物生长状况,从而实现实时调控和精准施肥。
目前,传感器技术已发展到多种类型和多个方面,如土壤温湿度传感器、光合作用传感器、气象站传感器等,但其价格、精度和可靠性等方面仍需要改进。
3. 自适应控制技术的应用自适应控制技术是指根据作物的生长状态、施肥需求和环境变化等情况,自动调整施肥量和施肥频率,以达到最优化的施肥效果。
目前,自适应控制技术已广泛应用于工业控制领域,但在农业领域的应用还需要进一步完善和推广。
变量施肥自动控制技术的研究和应用面临着许多问题和挑战,如:1. 传感器价格昂贵传感器是变量施肥自动控制技术的重要组成部分,同时也是成本较高的部分。
传感器价格昂贵,对普及该技术产生了一定的限制。
2. 决策模型不够精确决策模型是变量施肥自动控制技术的核心,但现有的决策模型对植物的生长环境、生长状态和营养需求等因素的考虑仍存在局限性,需要进一步完善和精确。
3. 应用难度较大变量施肥自动控制技术的应用需要很高的专业知识和技能,普通农民较难掌握。
变量施肥控制系统设计

变量施肥控制系统设计怀宝付;梁春英;王熙;李爱平;张红霞【摘要】A set of control system with a Single-Chip as a control core and a hydraulic motor as executing unit was designed to realize the variable rate fertilization.This system was made of a Single-Chip controller,a signal collecting unit and a hydraulic steering controller.By using Visual Basic 6.0 software and working patterns for variable rate fertilization,GPS navigation developed,and the control accuracy test was carried out.%设计了以单片机为控制核心、液压马达为执行机构的变量施肥控制系统。
该系统由单片机控制器、信号采集单元、液压传动控制组成,通过使用Visual Basic 6.0编程软件实现了GPS 导航定位变量施肥工作模式,并对其进行了控制精度试验。
【期刊名称】《黑龙江八一农垦大学学报》【年(卷),期】2011(023)004【总页数】4页(P68-71)【关键词】精准农业;变量施肥;液压马达【作者】怀宝付;梁春英;王熙;李爱平;张红霞【作者单位】黑龙江八一农垦大学信息技术学院,大庆163319;黑龙江八一农垦大学信息技术学院,大庆163319;黑龙江八一农垦大学工程学院;黑龙江八一农垦大学工程学院;黑龙江八一农垦大学工程学院【正文语种】中文【中图分类】TP273.1现代农业的高速发展,除了依靠生物技术的进步和耕地面积、灌溉面积的扩大外,基本上是在化肥与农药等化学品和矿物能源的大量投入条件下获得的。
《施肥控制器》文献综述

石河子大学信息科学与技术学院毕业设计文献综述课题名称:基于PLC的施肥控制器设计学生姓名:梁世杰学号:2010508073学院:信息科学与技术学院专业年级:电子信息工程10级指导教师:田敏职称:副教授完成日期:二○一四年六月十一日文献综述前言我国是一个水资源严重短缺的国家,干旱是制约我国农业发展的主要因素之一。
在我国,水的有效利用率只有30%一40%,喷灌、滴灌等先进的节水灌溉占总灌溉面积的比例还很小,大多数地区仍沿用地面灌溉[1]。
发展节水灌溉,提高农业生产力的潜力很大。
化肥做为植物生长的养分来源受到了各国农民的普遍欢迎,普遍把化肥做为粮食增产的主要手段之一[2]。
通常情况下农民使用化肥都是把化肥均匀地撒播在地表,然后再进行相应的农艺作业。
采取这样作业程序,在土壤养分高、低不同的地方仍然使用相同数量的化肥就造成了在养分高的地段化肥过量使用,这些过量使用的化肥一部分在土壤中被分解或吸收掉,另外有部分在土壤中被淋溶,由地下水吸收,极易造成地下水资源污染,影响人们的身体健康。
因此随着农业生产可持续发展,化肥对环境造成的污染越来越受到有关国家的重视,多数发达国家开始制定相关的法律限制化肥的使用数量[3]。
因此,养分缺乏以及水、肥二者供应的不同步性,是制约我国农业生产发展经常遇到的问题。
滴灌施肥可有效地调节作物水分和养分的供应,在我国具有巨大的应用前景。
尤其在西北和华北地区,由于这一地区占我国国土面积的52.2%,耕地面积约占全国的30%,采用滴灌施肥技术,不仅可节约该地区宝贵的水资源,而且可使原来一些采用常规灌水施肥方法不适宜种植的土地,如荒地、甚至沙漠种植变为现实[3]。
滴灌施肥技术的应用有利于实现“三个根本改变”,一是有利于根本改变传统农业用水方式,大幅度提高水资源利用率;二是有利于根本改变农业生产方式,提高农业综合生产能力;三是有利于根本改变传统农业结构,大力促进生态环境保护和建设,最终实现农产品竞争力增强、农业增效和农民增收的目的[4]。
变量施肥系统的设计与研究

变量施肥系统的设计与研究变量施肥系统的设计与研究引言在农业生产过程中,合理的施肥是保证农作物正常生长和丰收的关键因素之一。
然而,传统的施肥方法常常存在着浪费、不均匀施肥和环境污染等问题。
为了解决这些问题,变量施肥系统应运而生。
本文将探讨变量施肥系统的设计和研究,以期为农业生产提供更加科学、高效、环保的施肥方案。
1. 变量施肥系统的意义传统的施肥方法通常采用均匀施肥的方式,无法满足不同农田的不同需求。
而变量施肥系统利用现代信息技术和智能控制技术,根据土壤养分、作物需求、气象条件等多种因素进行施肥调控,能够实现精准施肥,提高施肥效果,减少农业生产的资源消耗和环境污染。
2. 变量施肥系统的设计原理变量施肥系统的设计原理主要包括参数获取、决策与控制、施肥调控等几个环节。
首先,通过土壤样品采集和实时监测技术获取土壤养分数据,并结合作物生长模型预测作物需求。
然后,根据土壤养分数据和作物需求,通过决策与控制算法确定施肥方案。
最后,通过施肥调控设备将相应的养分溶液或粒状肥料投放到指定位置,实现变量施肥。
3. 变量施肥系统的关键技术为了实现变量施肥系统的设计和研究,需要应用多种关键技术。
首先是土壤养分检测技术,通过离线或在线方式获取土壤养分信息,为后续的施肥调控提供数据支持。
其次是作物生长模型技术,通过建立作物生长模型,预测作物对养分的需求量。
再次是智能决策与控制技术,根据土壤养分数据和作物需求,采用优化算法和控制策略,制定最佳施肥方案。
最后是施肥调控技术,通过可编程控制器和施肥设备,实现变量施肥的精确调控。
4. 变量施肥系统的优势和挑战变量施肥系统相较于传统的均匀施肥方法具有明显的优势。
首先,能够根据实时监测的土壤养分数据和作物需求,实现精准施肥,提高施肥效果,最大限度地减少养分浪费。
其次,可以根据不同农田的特点和需求,制定个性化的施肥方案,提高农作物的产量和质量。
然而,变量施肥系统的设计和实施也面临一些挑战,如土壤养分检测技术的准确性、作物生长模型的建立和验证、决策与控制算法的优化等问题,需要进一步的研究和完善。
基于PLC的精准变量施肥自动控制系统研究

基于PLC的精准变量施肥自动控制系统研究杨军;田敏;陈剑;吕新【摘要】针对国内施肥的精准度低、均匀性差、有效利用率低、环境污染等问题,文章设计了一套滴灌农田精准变量施肥自动控制系统。
该系统采用变量施肥方式,通过PLC控制器来采集压力、流量、电机转速等信息,通过控制配肥电机、活塞和电磁阀改变系统实际施肥量,实现自动配比调节和变量施肥。
试验分析表明,该系统具有良好的控制精度,性能稳定可靠,可满足农田精准施肥的需求,实用性好。
%In view of the low precision, poor uniformity, low effective utilization and environmental pollution, a set of auto-control system for precisionand variable fertilization applied in drip irrigation ifeld is designed. The system, using variable rate fertilization way, through the PLC controller to collect the information of pressure, lfow, motor speed etc, through the control with fat motor, the piston and the solenoid valve to change system practical amount of fertilization, realizes automatic proportioning and variable rate fertilization. The analysis of experimental shows that the system has good control precision, stable and reliable performance and it can meet the demand of precision fertilization of farmland so it is good in practicability.【期刊名称】《无线互联科技》【年(卷),期】2016(000)014【总页数】4页(P50-53)【关键词】自动控制;变量施肥;施肥装置【作者】杨军;田敏;陈剑;吕新【作者单位】石河子市政府,新疆石河子 832000;石河子大学绿洲生态重点实验室,新疆石河子 832000;石河子大学绿洲生态重点实验室,新疆石河子 832000;石河子大学绿洲生态重点实验室,新疆石河子 832000【正文语种】中文精准变量施肥技术是一个重要的领域。
变量施肥机控制系统的研究的开题报告
变量施肥机控制系统的研究的开题报告
一、选题的背景和意义:
随着农业生产的发展,化肥的使用已经成为提高作物产量和质量的重要手段。
但是传统的施肥方式并不精确,存在浪费和污染等问题。
为了解决这些问题,变量施肥
机控制系统应运而生。
该系统通过采集农田中的土壤pH值、温度、湿度等信息,利用先进的控制算法自动调节施肥机的施肥量,实现精确施肥,提高农作物的利用率,减
少浪费和污染,提高农业生产效益。
二、研究的目的和内容:
本研究旨在设计一种基于单片机的变量施肥机控制系统,实现对土壤条件的实时监测和施肥机的智能控制。
具体研究内容包括:
1.确定变量施肥机控制系统的硬件和软件组成,搭建实验平台。
2.设计基于单片机的硬件电路,并通过编程实现控制算法和数据处理。
3.进行各种实验和测试,验证系统的性能和可靠性。
三、研究的方法和步骤:
1.文献调研,了解国内外变量施肥机控制系统的发展现状和研究成果,明确研究方向。
2.确定变量施肥机控制系统的硬件和软件组成,搭建实验平台。
3.设计基于单片机的硬件电路,包括传感器采集模块、控制模块、通信模块等。
4.编写控制算法和数据处理程序,实现智能施肥和数据分析功能。
5.进行系统的实验和测试,验证系统的性能和可靠性,并对结果进行分析和总结。
四、预期结果和意义:
本研究预期能够设计出一种基于单片机的变量施肥机控制系统,该系统实现了对农田土壤的实时监测和施肥机的智能控制,能够准确地根据土壤的情况调整施肥量,
提高农作物的利用率,减少化肥的浪费和污染,对于推广农业现代化、实现农业可持
续发展具有重要的实践意义和社会、经济效益。
液体肥变量施用控制系统性能的试验研究

作者 简 介:梁 春 英 ( 9 1一) 女 , 东 商河 人 , 教 授 , 士 , E— 17 , 山 副 硕 (
究液 体 肥 浓 度 、 定 流 量 和 管道 压 力 等 3因素 对 系统 误 差 的 影 响 ; 用 单 因 素 和双 因 素 分 析 法 分 析 各 因 素 与 试 设 利
验指 标 的关 系 , 定 指 标 和各 因素 之 问 的 回 归 数 学 模 型 及各 因 素 在 回 归 模 型 中 的 主 次 顺 序 。试 验 结 果 表 明 , 确 设 定 流 量 对 系统 误 差 的影 响最 大 。通 过 优 化计 算 , 出 液体 肥 变 量 施 用 系统 的 最 优 工 作 参 数 : 体 肥 浓 度 为 2 . 得 液 2 8 , 定 流 量 为 2 . L mn, 道压 力 为 0 8 a % 设 39/ i 管 . MP 。此 参 数 下 系统 误 差 为 0 5 % 。 .9 关 键 词 :变 量 施肥 ;控 制 系 统 ;参 数 ;液 体 肥 中图分类号 :T 2 3 5; 1 6 P 7 . S 2 文献标识码 :A 文章编号 :1 0 0 3—1 8 2 1 ) 8—0 1 0 8 X( 0 0 O 1 7— 4
代 ¨ 。发展 优 质 高 效 农 业 促 进 了对 液 体 肥 料 的 消 费 J 需 求 , 液 体 肥 料 的 发 展 创 造 了有 利 条 件 。 因此 , 为 大
力 研究 和 开发 液 体 肥 料 ,科 学 与 合 理 施 用 液 体 肥 料 , 不 仅会进 一 步 降低 农 业 生产 成本 , 高 农 产 品 的经 济 提
农 作物 的生 长状 况 的 基 础 上 , 据 土 壤 本 身 的理 化 特 根
2021实现变量施肥功能的控制软件设计范文2
2021实现变量施肥功能的控制软件设计范文 引言 变量施肥(Variable Rate Fertilization or VariableRate Application,简称VRF 或者 VRA)技术作为精准农业重要内容之一,其“因地制宜”的技术思想充分体现了精准农业的精髓。
变量施肥的基本原理是根据土壤养分存在差异的特点,按照田间每一小耕作的田块(格网、操作单元)的具体需要,对肥料进行“变量投入”,根据土壤的养分进行施肥,力求在保证一定目标产量的情况下,充分利用原有土壤肥力,提高化肥利用效率,以实现降低投入、提高产出、减少污染及保护环境的目标。
变量施肥的方式有两种:一是处方信息控制施肥;二是实时控制施肥。
本文所研究的是第1 种施肥方式。
该方式通过加载变量施肥处方图并读取相关的施肥信息,系统分析判断后,计算出恰当的施肥量,根据地块对肥料的要求,有针对性地撒施不同配方及不同量的肥料。
为了实现以上目标,本文就使用eSupermap 控件和 C#编程语言如何实现变量施肥控制软件进行设计。
1eSuperMap 控件的概述 eSuperMap是一个可以进行二次开发的嵌入式地理信息系统(eMbedded GIS) 控件,既满足嵌入式设备,又具有强大的功能特点。
该控件是由北京超图软件股份有限公司独立研发、根据实际情况专门为嵌入式设备量身定做的,满足了开发人员对嵌入式 GIS 开发和应用的要求。
其在根据嵌入式设备硬件资源紧张的基础上,为了达到对资源的消耗低、功能强大、性能突出等目的,对数据结构和基本算法进行优化,做到以较少的资源换取较多的功能。
2WinCE 系统的概述 WinCE操作系统属于通用型的嵌入式操作系统,是一个开放的、可升级的 32 位嵌入式操作系统,是基于掌上型电脑类的电子设备操作系统。
Windows Em-bedded CE 6. 0 重新设计的内核具有 32 000 个处理器的并发处理能力,每个处理有 2GB 虚拟内存寻址空间,同时还能保持系统的实时响应。
《基于WindowsCE数控系统的运动与PLC控制器的设计与实现》
《基于Windows CE数控系统的运动与PLC控制器的设计与实现》一、引言随着工业自动化技术的快速发展,数控系统在制造业中扮演着越来越重要的角色。
而基于Windows CE的数控系统因其高效率、高稳定性和良好的可扩展性,逐渐成为现代制造业的首选。
本文将重点探讨基于Windows CE数控系统的运动控制与PLC控制器的设计与实现,旨在为相关领域的研究与应用提供参考。
二、系统概述本系统基于Windows CE数控系统,采用运动控制与PLC控制器相结合的方式,实现对机床等设备的精确控制。
系统主要由以下几个部分组成:Windows CE数控系统、运动控制器、PLC 控制器以及相应的硬件设备。
其中,Windows CE数控系统负责处理控制指令、监控设备状态等任务;运动控制器负责驱动设备进行精确的运动控制;PLC控制器则负责实现设备的逻辑控制。
三、设计思路1. 硬件设计硬件设计是整个系统的基础,需要考虑到设备的性能、稳定性以及可扩展性。
首先,选择适合的CPU、内存、存储等硬件设备,确保系统具备足够的处理能力和存储空间。
其次,设计合理的电路和接口,保证硬件设备之间的稳定连接和良好的兼容性。
最后,根据实际需求,设计适当的外围设备,如电机驱动器、传感器等。
2. 软件设计软件设计是整个系统的核心,需要考虑到系统的易用性、稳定性和可维护性。
首先,开发适用于Windows CE的数控系统软件,实现控制指令的处理、设备状态的监控等功能。
其次,设计运动控制算法和PLC控制程序,确保设备能够精确地完成各种动作和逻辑控制。
最后,通过人机交互界面,实现用户对设备的控制和监控。
四、实现过程1. 硬件实现根据硬件设计,选购合适的硬件设备,并进行组装和调试。
在组装过程中,需要注意各部件的连接方式和稳定性。
在调试过程中,需要检查各部件的性能和兼容性,确保硬件设备能够正常工作。
2. 软件实现在软件实现过程中,需要先开发Windows CE数控系统软件,包括控制指令的处理、设备状态的监控等功能。
自动化施肥控制系统的研究的开题报告
自动化施肥控制系统的研究的开题报告以下是自动化施肥控制系统的研究开题报告:一、选题背景随着现代农业的发展,农业生产技术不断更新,传统的人工施肥方式已经无法满足当今农业发展的需要。
自动化施肥控制系统应运而生,成为了现代农业生产中不可或缺的一部分。
自动化施肥控制系统能够实现对土壤、植物的精准、科学的施肥,提高农产品的品质、产量和效益。
二、研究目的本次研究旨在设计和开发一套自动化施肥控制系统,能够对农作物进行有效的施肥,提高农产品的品质和产量,同时减少施肥浪费和成本。
三、研究内容和方法本研究将主要从以下方面展开:1. 研究自动化施肥系统的组成和原理,包括传感器、执行器、控制器等硬件设备的选择和使用原理。
2. 研究不同作物在不同生长阶段的施肥需求,设计相应的施肥控制策略。
3. 针对同样的农作物,利用不同的施肥策略进行实验研究,并比较不同策略的施肥效果,确定最佳的施肥策略。
4. 设计施肥控制系统的软件程序,实现对系统的自动控制和管理。
四、预期成果1. 设计和制作一套功能完备、稳定可靠的自动化施肥控制系统原型。
2. 总结和比较不同的施肥策略,明确不同策略的优缺点,确定最佳的施肥策略。
3. 通过试验验证系统的施肥效果,并提出优化建议。
4. 撰写研究论文,发表在相关学术期刊上。
五、研究进度安排本次研究计划于2021年9月开始,预计于2022年6月完成,研究进度安排如下:1. 2021年9月-10月:研究自动化施肥系统的组成和原理。
2. 2021年11月-2021年12月:研究不同作物在不同生长阶段的施肥需求。
3. 2022年1月-2022年3月:设计和制作自动化施肥控制系统原型,并进行试验研究。
4. 2022年4月-2022年5月:分析试验数据,总结不同施肥策略的优缺点,提出优化建议。
5. 2022年6月:撰写研究论文,发表在相关学术期刊上。
六、研究意义本研究的成果将为现代农业生产提供一个高效、准确的施肥控制方案,可以大幅度提高农产品的产量和品质,同时节约施肥成本和减少污染物排放,对于实现农业现代化和可持续发展具有重要意义。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
星” 系统等 ,都是基于 G S P 定位的,可对收获 、播
种 、施肥及施药进行测量和田间作业 。我 国在精准
农 业设备 方 面的研究 相对 起步 较晚 ,这些差 异 主要 表 现在 G S P 与农 业机 械 、农 田G S I 的接 口软 件 以及 农 田 GS 田间作 业 图层 与农 机 的接 口软件 等技 术 I的
建基 于 X B s20 S S a 7一 开发平 台的 Wi o s E 作 e n w 操 d C 系统 ;选 用 V 20 进行应 用程 序 的开 发 ;选 用 S 05
A teyc cvSn 实现嵌 入式计 算 机和 P i C机 的通信 。 开 发过 程 中要 对 X B s20 发平 台 的 内核 进 S ae7 开 行 定制 ,使 用 了微 软公 司 的 Paom B i e作为 定 lfr ul r t d 制 内核 的 工 具 ,在 安 装 Paom ule 的过 程 中 , lfr B i r t d
研 究 选 择 使 用 Widw E . no sC 50作 为 X B s20 S ae7一 S 开发 平 台的操作 系 统 ;选 用 Paf mB i e .构 ltr ul r 0 o d 5
药等农资的使用 ,从而达到减少投人 、增加产量 、
提高农资利用率 、减少环境污染的目的 。在国外 ,
添 加 以下组 件 :M C 微软 基础 类库 ) a Fl F ( ;Ft i e
Ss m文件 系统 ;P A 7 S otO I;Sr l yt e X 2xU BH s( HC) ei a
息 ,利用计算机读取处方 图对应的施肥量 ,通过控
制变量控制器驱动液压系统 , 从而实现控制施肥量 的目的 。本文提出了一种以Wi o s E n w 为操作 系 d C
第 1 期 1
刘文洋等 : n o s E Wi w 环境下的变量施肥控制系统研究 d C
入n 1 。精准 农业 首 先要 定 量认 识 田间产 量 、以及 农
差 分系统来 工作 ,还提供了 R K R a t e i — T ( el i n —m k e
mac t ,实 时 动态 定位 技 术 ) i 的扩 展选 项 ,可 以方便 的将 两 台机器组 成 R K系统 。 T
要选择 C U类型为 A M 4 和X C L 使系统能够 P R V I SA E
对 20 S的 C U进行 支 持 ,并 在随后 安 装 20 S 7一 P 7一 的
BP ( S 包 板级支持包 ) 。之后在 Pao u dr lf B i e中创 tr m l
建 一个新 工程 ,即是从 目录 中选择 B P S 包及 需要 的 各 个组件 来 配置平 台系统 变量 。在本 次开 发 中需 要
2 控制系统的硬件组成结构
变量 施 肥控 制 系 统采 用 X cl P A 7 微处 理 sa X 20 e 器作 为处 理 核 心 ,P A20 Itl 发 的高 度集 成 X 7 是 ne开
1 软硬件平 台的选择
本 研 究 的 变 量 施 肥控 制 系 统 的硬 件 开 发 平 台 选 用 了亿 道 公 司 的 X B s20 S 7 一 平 台包 括 S ae7一 ,20 S C U。F A H,S R P LS D AM,C L P D核 心 系统 部 分 和外
业生产环境 中土壤肥力 、苗情长势等因素分布的时
空差异 性 ,然后研究 这些 差异 之 间的相互 关系 ,最
终根据研究成果进行定位管理 ,根据空间差异性的 分布 ,因地制宜 ,按需要变量调整种子 、化肥 、农
在软件平台的选择方面 ,由于嵌入式操作系统 Widw E n o s 具有用户界面出色和通信性能良好等特 C 点 ,并且是微软专门为信息设备 、移动应用 、消费 类 电子 产 品等设计 的嵌入 式操 作 系统 ,所 以本
的片上 系统微处 理器 ,结合 了 It s l技 术 , nl ce eX a
具 有 动态 电压 调 整 、动 态 频 率 调 整 以及 成熟 的 电 源 管理 ,提 供 业 界 ห้องสมุดไป่ตู้ 先 的 MIs P/ 性 能 。控 制 系 mW 统 的 硬 件 组 成 结 构 见 图 l sa X 7 微 处 理 ,X cl P A20 e
Fah ls 存储 器 的容 量 较小 ,此 外 ,在 系 统 运行 的过
程 中还要保存工作 日 ,以作为之后变量施肥工作 志
的参考。因此要尽可能地控制 内核大小 ,确保为之 后 的工作保 留足够 的存储空间。
现变量施肥的功能,具有可靠性和实时 』高 、成本 生
低廉、扩展性 良好和接 口稳定等特点。
不过硬 ,农机作业传感器件多数采用 国外的进 口部 件 ,而导致整机成本过高等方面 。中国农业科学院 土壤肥料研究所在引进 G S I 和变量管理核心 P 、GS 部件的基础上 ,结合我国国情 ,研制 了适合我国国 情的变量施肥机具。国家农业信息化工程技术研究 中心依靠引进和 自主研发相结合 ,开展了变量投入 技术研究 ,其 自 动变量施肥系统是基于地图的变量 施肥控制系统 ,由机载 G S P 得到机具精确的位置信
统 的变量 施肥 控 制 系统 ,该 系统 以 P A 7 嵌 入式 X 20 处 理器 为核 心 ,通过 R 22 口接收 卫星 数据 进行 S3 接 处 理 ,然后通 过驱 动 电路对排 肥器进 行控 制 ,以实
P rSp o o u pa串行 口支 持 ;Fn 字体 支 持 ;U B t ot s S A teyc c vSn 文件同步 ;其他外设驱动组件 。作为一 i 个 嵌入 式 的系统 ,本 身 资源较 为有 限 ,特别 是