三维一体化超微定位系统的研制
挑战杯历届全国特等奖、一等奖作品

国家历届挑战杯特等奖、一等奖作品第一届“挑战杯”全国大学生课外学术科技作品竞赛由清华大学于1989年承办:清华大学摘得“挑战杯”一等奖获奖名单如下:北京大学刘闯在地理信息系统中土地评价模型的建模研究清华大学陈邕涛等中华学习机CAI软件开发工具清华大学吴丹策等电脑照相及微机图像处理系统清华大学金龙文等竹草木漂白系列新工艺的研究华中理工大学吴敏等建筑方案“将居民安置在发种种的小镇中”新疆石河子医学院王惠民门脉系的内分泌学意义第二届“挑战杯”全国大学生课外学术科技作品竞赛由浙江大学于1991年承办:上海交通大学摘得“挑战杯”一等奖获奖名单如下:浙江大学微机遥感图像显示操作及处理系统郑州大学方兴未艾福利企业国防科技大学Hyperview(v1.01)系统北方交通大学铁道部及各地区财务基准收益率的测定上海交通大学光纤中自然聚焦光场的环形结构上海医科大学他莫昔芬枸橡酸新工艺的研究及其原理的讨论上海交通大学农村民居建筑调研华中理工大学微量泄漏检测仪北京航天航空大学简繁五笔汉字系统及其为通道汉卡四川成都电子科技大学通信母板自动测试系统第三届“挑战杯”全国大学生课外学术科技作品竞赛由上海交通大学于1993年承办:北京大学获得“挑战杯”一等奖获奖名单如下:北京大学基于具有更佳频率分辨率的正交子波变换及自适应VQ技术的图像压缩北京大学危机与出路.....从九二深圳股市看中国B股清华大学铁基合金薄膜中铁原子磁矩的反常增大等作品获奖东北大学超级电子档案系统吉林大学镧系离子荧光探针探测天花粉蛋白结构和分子间能量传递武汉大学信安-I型计算机网络信息保护系统浙江大学PLT陶瓷期间合金电极成型新技术四川师范大学四川西部蝶类资源调查天津财经学院建立会计逻辑学体系的构想北方交通大学多渠道多方式利用外资发展我国的铁路的探讨中国科技大学本原矩阵指数的一个猜想证明上海交通大学浦东开发区环境调查及综合防治上海医科大学Z曲线显示和分析DNA系列的直观工具南京理工大学激光全息场再现图像的离子自动检测华东理工大学化学气相淀积反应器中超细粒子形成过程研究及产物形态控制华中理工大学将城市引入农村,农村引入城市-繁忙江南水乡的僻静水上花园齐齐哈尔工学院黑龙江省甜菜糖业产品结构调整战略研究报告北京航空航天大学空中机器人系统北京航空航天大学智能化电力电容在线检测仪第四届“挑战杯”全国大学生课外学术科技作品竞赛由武汉大学于1995年承办:复旦大学摘得“挑战杯”一等奖获奖名单如下:复旦大学载能束合成新型共价氮化碳超硬材料研究河北大学BaZrXTil-03固溶体的合成,结构与物性武汉大学高性能镍/金属氢化物电池和锂离子蓄电池暨南大学物体三维形貌测试技术的研究等作品获奖北京大学物体三维形貌测试技术的研究云南大学村落文化贫困地区农村妇女生育健康服务模式——武定县中山大学《劳动法》与外来工的权益保障北京大学光WDM(波分复用)中的激光波长控制清华大学高速中西文激光打印/照排控制器北京师范大学论教师的教学效能感南京理工大学走出困境再创辉煌——重庆军工企业走上发展之路的启示北京科技大学双拇指型多指手大连理工大学大学物理实验CAI教学软件包华中理式大学新型宜人化计算机辅助设计绘图系统——开目CAD华北师范大学松树花粉的培养和它萌发时营养万分的变化吉林工业大学梁的大挠度强迫振动的非线性响应的分析的新方法苏州丝绸工学院真丝新村料的研制及产品开发北京航天航空大学遥控多用途空中飞行平台第五届“挑战杯”全国大学生课外学术科技作品竞赛由南京理工大学于1997年承办:清华大学摘得“挑战杯”一等奖获奖名单清华大学《十字路口看乡企》——中国农村乡镇企业转制问题调查报告清华大学蛋白质去折叠与折叠机制的研究清华大学基于界面设计的多层膜技术获得新型合金清华大学文本无关的说话人语音语音识别系统北京大学两家名油企业生活后勤体制变革北京大学股市中操纵市场行为及防范的法律对策北京大学 Runge—lenz矢量与升降算子武汉大学武汉市再就业工程调研报告南京理工大学小波变换中的视觉门限模型和图像的层次分割优生权编码复旦大学通用工件识别系统生成工具VisionExport南京大学水煤奖添加剂NDF上海交通大学柔体机器人(组件)云南大学边疆民族地区生态环境变迁与脱贫致富——云南省怒江傈族自治州经济开发新模式研究北京航空航天大学三翼面微型无人驾驶验证机国科学技术大学酶反应的理论研究——方法及在葡萄糖异构酶中的应用四川联合大学利用红矾母液和铬酐下脚料生产蒙囿吸收铬鞣粉剂石油大学河南西峡恐龙蛋化石层及恐龙绝灭原因初探中国政法大学青少年创造能力培养和知识产权保护教育调查报告吉林工业大学轿车车身焊装用微机控制自动螺柱焊机第六届“挑战杯”全国大学生课外学术科技作品竞赛由重庆大学于1999年承办:复旦大学获得“挑战杯”一、二等奖获奖名单北京航空航天大学鱼类运动仿生研究及其柔体舰艇模型东北大学微型足球机器人系统江苏理工大学高性能铝合金材料的应用研究复旦大学指间区纹的进化和遗传南京大学体内可降解吸收医用高分子材料及其制品大连海事大学椭圆波导中的场中国科学技术大学关于α和β环糊精与苯衍生物之间的包含驱动力及包合结构的新模型上海交通大学面向软件无线电的数字发射机(激励器部分)东南大学中文个人数字助理(ASICPDA-2000)北方交通大学大规模发展交通仿真及公交智能调度指挥平台开发重庆大学 AV-100S型双面表格自动阅读机苏州大学真丝新材料-差别化柞桑弹力真丝的研制与产品开发北京大学从法院状告新闻媒体谈起——一起名誉侵权官司引发的思考复旦大学适应环境变化,构建新型企业——上海国有外贸企业改革调查华东师范大学师范大学生专业思想状况调查哈尔滨理工大学侵华日军731部队罪证网站国立华侨大学基于可持续发展的水资源定价试探华中理工大学基于针式传感器的多功能扫描探针显微装置南京大学电动自行车综合测试仪吉林工学院轿车深冲件应用国产冷轧IF钢板研究江苏理工大学 4LGT-130型稻麦联合收割机的研制重庆大学虚拟式小波变换信号分析仪重庆医科大学手握(傻瓜)式纯水检测仪华东理工大学清洁化生产取代芳胺磺酸中国科学技术大学超支化聚(胺-酯)的合成及其光固化性能研究吉林工学院汽车内饰件粘合剂的研制同济大学茶多酚提取新工艺及其系列产品开发无锡轻工大学 UASB-CAAS系统处理高浓度有机废水的工程技术无锡轻工大学维生素在光滑球拟酵母发酵生产丙铜酸中的关键作用广西师范大学湘西洛塔植物区系及开发利用研究重庆大学心肌收缩能力的一种无伤性检测和评估方法研究山西大学 Hie Senberg 方程的换算表示复旦大学国内首家微波硫灯的研制桂林工学院 NETWARE高级编程接口及未公开的核心技术武汉交通科技大学二维条码自动识别应用技术研究西安电子科技大学高速分组无线网长沙铁道学院空调客车状态参数集中管理系统成都电子科技大学校园网上的学生管理信息系统中国科学技术大学基于中文实时语音技术的有声电子系统北京理工大学《圣林3.0》实时三维图象引擎武汉大学系列安全容错智能卡应用系统重庆邮电学院多链路中国NO.7的信令分析仪华中理工大学基于LAN/INTERNET的H.323视频会议系统西安电子科技大学自控光阀及其在防弧光领域的应用清华大学细菌基因快速鉴测仪中国地质大学(武汉)油气资源储量评价系统华东理工大学无规共聚高分子相平衡的研究武汉大学新型固相微萃取探针复旦大学智能酒气电子鼻山东工业大学弹性管束热交换器的结构、动态特性及自动控制过程仿真重庆建筑大学新型高效掺合料北京大学社区的构成清华大学走近21世纪的中国环境技术中国人民大学面对挑战,中国对外经济的立足点北京师范大学困境与出路——城镇企业下岗职工再就业状况调查北京师范大学面向21世纪发展远程教育——关于中国远程教育中若干问题的调查与思考中国政法大学中国农民法律意识现状探讨西南政法大学典权的过程分析及性质研究山西大学刚玉之路河海大学江苏省水资源可持结发展模式探讨中国药科大学我国药品价格现状分析及管理对策的研究杭州商学院论国有企业激励机制湖南财经学院买方市场:高教与经济增长—发展高教是推动经济增长的重要途径华中农业大学农业科技推广中的几点思考第七届“挑战杯”全国大学生课外学术科技作品竞赛由西安交通大学于2001年承办:复旦大学和东南大学获得“挑战杯”特等奖北京大学锆基固体电解质纳米晶薄膜材料的制备及微结构与电学性质研究清华大学结构光三维扫描仪北京航空航天大学数字立体电视其计算机成像系统南开大学发光锌纳米分子复旦大学上海越族后裔与台湾高山族的渊源华东师范大学师范生对教育类课程看法的调查报告东南大学 OSC2001微型掌上数字存储示波器东南大学南京市流动民工现状调查山东大学换热器动态仿真及智能控制系统山东大学紫外倍频晶体K2AL2B207的生长技术汕头大学 LCD生产过程的基板自动对位贴合及ITO、SPACER自动检测系统电子科技大学考虑交易费用与风险情况下移动平均交易规则的检验四川大学论对抽象行政行为的司法监督重庆大学“移民者的乐园”——三峡库区“棚户现象”调查研究与城市(镇)迁建、移民问题思考渝州大学绿色贸易壁垒及重庆之应对贵阳中医学院《针穴II》虚拟三维教学系统西安交通大学金纳米球壳微粒的空腔谐振吸收特性)西安交通大学一种适用于小C臂X光机的数字成像系统一等奖北京大学中国高龄老人健康状况和健康预期寿命研究北京航空航天大学环形翼飞机北京航空航天大学弹射座椅地面综合测试仪及其嵌入式系统北京航空航天大学多机器鱼协调及机器鱼的机动性研究北京科技大学喷丝板自动检测系统北京科技大学灵丘贫锰银矿综合利用技术研究北京理工大学哈勃常数的实验估计北京理工大学发动机润滑系统仿真软件包北京师范大学教师反馈、学生的归因模式与学生学业成绩关系的研究:一项行动研究及其对学校心理健康教育的启示中国人民大学真茵寡聚糖诱导子诱导悬浮培养红豆杉细胞的信号转导途径及其过程模型的研究天津理工学院缔合色心型X线影像板河北大学陆马峰的发育与筑巢行为的研究河北科技大学 L-抗坏血酸-2-三聚磷酸酯的合成研究华北电力大学民事举证责任倒置问题探析大连海事大学船舶运动控制试验平台大连理工大学冰柜监控管理系统大连理工大学单金属、双金属催化剂表面CO氧化反应的模拟模型大连理工大学医学层析图象三维几何重建与可视化仿真东北大学般若企业互联网络综合应用平台吉林工学院溶液法银纳米微粉的光化学制备哈尔滨理工大学地下管线定位仪东华大学中国绿色服装发展探究复旦大学转动基板的激光测温复旦大学知识产权新课题——基因专利复旦大学以企业信息化迎接B2B挑战华东师范大学 GSEEK码路天使——中西文著者号码自动生成系统上海财经大学高级管理层激励与上市公司经营绩效上海交通大学全光通信系统仿真软件上海师范大学如何在中国农村普及信息技术教育同济大学多高层建筑结构设计系统(简称MTS)东南大学均压型行波形超声波电机苏州大学真丝调拒水拒油防污多功能整理新技术研究及产品开发苏州大学非接触式高精度数字图像面积测量仪苏州大学激发型抗人CD40单克隆抗体的研制及产品开发扬州大学 Xa21基因导入水稻广亲和恢复系SWR20提高白叶枯病抗性中国药科大学脆壁克鲁维酵母菌乳糖酶的开发与应用浙江大学基于综合推理的集成化智能书法创作合肥工业大学关于安徽农村税费改革的调查和建议中国科学技术大学语音合成芯片郑州工程学院王涛河南省高校大学生创新能力现状调查与对策研究郑州工程学院袁少勇在WTO框架下:中国粮食流通体制改革研究华中师范大学我国城市社区的阶层化趋势研究武汉大学用人市场对大学毕业生质量评价的社会学分析武汉理工大学谈广义M集的演化及其在图形防伪中的应用中国地质大学(武汉) 全球古大陆再造软件开发研究国防科学技术大学 Windows变速器国防科学技术大学数字水印新技术华南农业大学车八岭保护区及其邻近地区的木兰科植物种群及其群落特征的研究中山大学中国南沙群岛海域浮游原生动物生物多样性研究中山大学珠江三角洲富裕农村主观剩余劳动力问题研究华南热带农业学院蝗虫霉菌的培养及致病性初步实验西南石油学院油藏压裂模拟设计与分析软件系统重庆大学可穿戴式计算机——Netdaily云南大学便携式高精度数字燃油流量计云南大学传统法文化的断裂与现代法治的真空——少数民族农村法治秩序建构路径选择的社区个案研究长安大学 The Problems and the Solutions on Ecological Architecture in Developing Countries西安电子科技大学单片机模糊控制软件仿真和生成平台西安理工大学 Sn02:F透明电热膜加热管兰州大学纳米微阵电极组装体系的制备和初步研究宁夏大学宁夏移民区可持续发展模式研究宁夏大学历史上固原地区人地关系的两次转型对生态建设的启示新疆大学维-汉-英三向背单词系统、电脑词典第八届“挑战杯”全国大学生课外学术科技作品竞赛由华南理工大学于2003年承办:清华大学获得“挑战杯”复旦大学获得挑战杯永久纪念碑一座一等奖获奖名单北京大学司法判决书中“双高”现象并存的另一种解释进路北京大学贫困学生怎么上大学?——中国高校学生贷款运行机制案例分析及其国际比较北京航空航天大学仿生飞翼布局飞机北京航空航天大学纳米光催化空气消毒净化器清华大学北京市流动儿童受教育状况及心理健康现状调查报告中国地质大学(北京)大学生创新精神和实践能力培养的调查研究——团体创新模式分析中国农业大学 AISCR-1-100微机控制全自动智能除雪机器人中国人民大学资本市场融资条件与产品市场竞争双重约束下的中国上市公司融资行为研究北京城市学院北京市乞丐现状调查报告天津大学桩基承台前方设挡土结构的大型码头结构河北科技师范学院杏树新害虫---JT虫生物学特性及无公害防治研究山西财经大学货币需求中的认知因素分析大连理工大学基于元胞自动机和Penna模型的生态系统模拟模型吉林大学国有经济控制力及控制方式新探吉林大学兽疫链球菌突变株产生的透明质酸的纯化及表征北华大学气动蠕动式缆索机器人哈尔滨医科大学中药复方抗心律失常药物筛选平台的建立复旦大学手晃电子显示棒上海财经大学城市轨道交通投资对周边地价变动影响的实证分析上海交通大学新型水葫芦打捞船上海交通大学基于 Inter PXA250的无线个人客户端的开发(wireless personal client)同济大学轨道交通运输组织仿真系统开发同济大学城市之桥—上海世博会人行过江“花”桥的结构概念设计同济大学四轮独立驱动燃料电池微型汽车东南大学通用手持概念仪器东南大学江苏省企业电子商务应用调查研究报告南京大学一种新型的磁力吸盘南京大学他们怎样生存——三峡移民迁前生存状况调查南京工业大学绿色紧凑的冷冻式空气干燥机南京理工大学鱼类旋涡射流推进理论及其应用南京师范大学稀土有机配合物生态转光剂的制备南京师范大学推进乡镇机构改革的对策研究——苏南、苏北若干典型乡镇机构改革的比较分析南京邮电学院基于动态路由控制的高性能IP宽带接入网关中国矿业大学花生收获机华东船舶工业学院仿生波动推进器绍兴文理学院组织的镶嵌、链接和整合——中国轻纺城地方商会个案分析浙江工业大学“AH-Assemble”汇编语言集成开发平台浙江师范大学村委会选举中乡镇政府的角色转换——以浙江省昌镇村委会选举为个案中国科学技术大学σ键超共轭作用在丙烯旋转能垒中的重要性中国科学技术大学最小超对称标准模型下的R宇称破坏机制对CERN LHC上轻子对产生过程的影响中国科学技术大学 Bcl-rambo β的发现和功能研究福建农林大学甘蔗近缘属植物斑茅的杂交利用与抗逆性评价福州大学基于评价方法属性层次的组合评价研究华侨大学三维自然纹理的反求设计与制造厦门大学从“三农”问题透视乡镇政权——以福建省枫亭镇和大济镇为例山东理工大学竹红菌甲素--一种新型抗生素的抑菌作用研究郑州工程学院大学生诚信缺失徂源及对策——转型期大学生信用行为分析湖北大学论诚信的劣变与对教育理性的质问----关于当代大学生诚信状况的分析以及对当代教育的反思华中科技大学北京、武汉高校人才培养与学生素质状况调查报告武汉大学绿色铅酸蓄电池及其生产工艺武汉化工学院水性聚酯树脂的合成及其涂料研制中国地质大学(武汉)求解动态TSP问题的新型演化算法国防科技大学新概念路标系统与无人驾驶汽车模型湖南大学 RSY-1肉类水分快速测定仪湖南大学入世过渡期:银行不良资产处置模式的比较分析与路径选择湖南师范大学传统文化与党风廉政建设湖南师范大学走向权利时代的民工权益——来自深圳民工的调查中南大学三峡移民的文化差异与文化融合——以湖南岳阳地区新市、杨林两地三峡移民为样本分析的调查报告中南大学基于等离子体聚合膜技术的压电免疫传感器的研究及其在急性白血病免疫分型中的应用广州大学岭南城市广场与公园热环境研究华南理工大学新型高分子点阵发光显示屏华南农业大学园艺植物自然分类系统及其汉拉英名称对照广东商学院 21世纪中国人口老龄化与银色产业开发四川大学通过分子复合实现聚乙烯醇的吹塑成膜西南石油学院现代试井分析技术及软件系统第三军医大学以纳米金为报告系统的病原体快速检测基因芯片第三军医大学抑制胆固醇合成对乳腺癌细胞离子跨膜流动、细胞骨架形成及细胞通讯功能影响的研究重庆工学院一个非常值得关注的“三农”问题——重庆市农村养老问题调查研究云南师范大学微波加热技术在催化化学反应中的应用长安大学环保型野生植物杀虫剂的研究西安科技大学基于虚拟仪器技术的多种机械量测试系统西安交通大学透平叶片型线设计及优化软件西安交通大学金纳米棒状微粒的吸收光谱宁夏大学数字显微镜模拟目镜及病理远程诊断系统新疆大学新疆家蚕抗菌肽基因工程产品的开发与应用第九届“挑战杯”全国大学生课外学术科技作品竞赛由复旦大学于2005年承办:复旦大学获得“挑战杯”复旦大学以总分420分的最高分夺得第九届“挑战杯”;北京大学、中国矿业大学、南京大学等20所高校捧得“优胜杯”;清华大学由于累计3次捧杯,获得“挑战杯‘永久纪念杯’”。
江苏省地质实验测试(选矿)专业高级工程师资格条件(试行

江苏省地质实验测试(选矿)专业高级工程师资格条件(试行)第一章总则第一条资格标准系统掌握本专业基础理论和技术知识,熟练掌握本专业的技术标准、技术规范、技术规程,熟悉相关专业知识;了解本专业领域国内外最新技术现状和发展趋势,能将新技术应用于工作实践;有较丰富的专业技术工作经验,能独立解决本专业复杂、疑难的技术问题,业绩显著,取得具有较大价值的科技成果,或在技术创新,引进、消化、吸收新技术中取得良好效果;发表、出版本专业有较高水平的论文、著作;有培养专业技术人才和指导工程师工作的水平和能力;能运用外语和计算机获取信息及进行学术交流;有良好的职业道德和敬业精神。
第二条适用范围本资格条件适用于从事对地质物料中矿物组成、结构构造、物理及化学特征、几何形态等的鉴定分析,对物料中组成的元素和同位素的含量、存在形式的测定,对微化石、超微系列化石进行孢粉以及岩石地质年代的鉴定和测定,对水进行物理性质分析和水化学分析,对化学污染物进行鉴别和含量测定,对岩土物理特性、力学性质、水理性质等进行鉴定和测定,矿产综合利用的选矿研究和试验,以及选厂设计,对试验、测试仪器的研制、生产和维修以及科学研究、技术设计、技术管理、技术开发、科技信息等专业技术工作的人员。
第二章申报条件第三条政治素质、职业道德要求遵守国家法律和法规,有良好的职业道德和敬业精神。
取得工程师资格后,年度考核均为合格(称职)以上。
取得工程师资格后,出现下列情况之一,在规定的年限上延迟申报。
(一)年度考核基本合格(基本称职)及以下或受警告处分者,延迟1年以上。
(二)受记过以上处分者,延迟2年以上。
(三)伪造学历、资历,剽窃他人成果等弄虚作假者,延迟3年以上。
第四条学历、资历要求必须具备下列条件之一:(一)博士研究生学历(博士学位),取得工程师资格后,从事本专业技术工作2年以上。
(二)硕士研究生学历(硕士学位),取得工程师资格后,从事本专业技术工作4年以上。
(三)大学本科学历(学士学位),取得工程师资格后,从事本专业技术工作5年以上。
机械工程论文题目机械论文题目选题大全开题报告文献综述
基于 MATLAB 与 ADAMS 联合 仿真的双臂机器人协调技术研究 基于 RFID 图书盘点机器人结构设计与仿真 新型渐开线少齿差行星减速器的优化设计研究 用于制冷压缩机的直线振荡电机优化设计 基于 ADAMS 仿真分析的模块化弹簧操作机构优化设计 烤烟移栽机取苗方式研究及其栽植器的设计 岩石热损伤微观机制与宏观物理力学性质演变特征研究 旋流式无堵塞泵优化设计与内流场 PIV 试验研究 柔性空间机器人操作大挠性航天器的动力学与振动控制 回转式膜上辣椒钵苗移栽机构的优化设计与试验研究 膨润土基有机复合相变材料性能研究 氧化锌/碳纤维/聚醚醚酮复合材料的制备及性能研究 纤维素/聚乳酸复合材料的制备及其性能研究 电传动轮式装载机的试验样机搭建与控制策略研究 电力机械无级变速器优化设计与特性研究 基于 LabVIEW 的水轮机振动信号分析 挖掘机履带链轨节刚柔耦合仿真及疲劳失效分析 基于工作流引擎的办公自动化管理系统的设计与实现 洗衣粉污染土工程性质劣化机理及改良方法研究 基于物联网的提升机制动装置故障诊断系统及方法研究 方捆捡拾装载车的设计及捡拾机构固定夹臂的优化
大型焦炉推焦设备振动机理研究 大流量液控单向阀动态特性分析与流场仿真 对旋局部通风机振动与噪声研究 提升设备远程监测与故障诊断试验系统开发 提升设备工况监测与故障诊断网络试验平台 TA2 在溴化锂溶液中的空化腐蚀行为研究 振动/回转复合式滚磨光整加工装置的结构分析与实验验证 脉冲电流处理 ZK60 镁合金的组织演变、机械性能及其细化机理的研究 游乐设备挑臂梁设计及其结构优化与仿真分析 多功能茶叶包装机的设计研究 清香型酒曲制曲机设计及其性能研究 基于称重法的烟尘浓度在线监测系统的工程设计及实现 基于实时特征值的风机振动状态监测与数据挖掘的故障诊断研究 偏心轮推杆行星传动运动学仿真及设计研究 基于零空间追踪的机械故障诊断方法研究 基于分数阶时频分析的机械故障诊断方法研究 行星齿轮传动的故障动力学研究 泳池自动升降系统设计与控制研究 可升降泳池平台结构设计及力学特性研究 轴流泵马鞍区运行特性研究 气液两相条件下离心泵内部流动特性数值计算和试验研究 基于 MED-EMD 和切片双谱的齿轮箱故障诊断研究
毕业设计参考题目

印制时间:2013-7-26 22:54
西南科技大学 汽车应用技术学院助学点
学生毕业设计参考题目
序号 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 毕业设计参考题目 杠杆零件工艺装备设计 夹具体零件工艺装备设计 拨叉(二)工艺装备设计 250*1000鄂式破碎机设计 500kg/d粉体的无铁超细管磨机设计 手摇式按摩器设计 杠杆零件工艺装备设计 新型发泡机的研制 组装下压机设计 基于三维造型汽油机链轮室钻铰销孔夹具的设计 自动装卸机设计 瓦楞纸板纵切机压痕装置设计 瓦楞纸板纵切机分切装置设计 涂布机设计 基于三维造型汽油机链轮室气压实验夹具的设计 基于三维造型汽油机链轮室涡壳面铣削夹具的设计 皮带跑偏自动调节控制装置研究 现代制造技术实验中心自动化网络系统设计 机械手自动化控制系统的PLC实现方法研究-硬件部分 直缝焊接机设计 机器人自动火焰切割H型钢的设计 经济型数控系统研究与设计 运送铝活塞铸造毛坯机械手设计 机械手自动化控制系统的PLC实现方法研究-软件部分 送料机械手设计及Solidworks运动仿真 精密数控平面磨床--工作台纵向进给、横向进给机构设计 海洋采矿破碎试验台液压系统设计 三轴机器人的结构设计 罐式厌氧发酵工艺及设备设计 基于反求工程的叶片零件数控加工工艺研究 摩擦锲块锻模的造型设计与加工工艺研究 基于PLC的水泥生料配料控制系统研究 车门总成MIG机器人焊接工作站控制系统设计 移动式皮带输送机设计 柴油机通风口座拉深模具及工艺设计 柴油机过轮轴机械加工工艺设计 链斗式提升机设计 安装板冲裁弯曲模具及工艺设计 瓦楞纸板纵切机切刀装置设计 瓦楞纸板涂胶机传动装置设计 家禽脱毛机的研制 瓦楞纸板横切机传动装置设计 瓦楞纸板涂胶机涂胶装置设计 基于三维造型汽油机链轮室攻丝夹具的设计 基于三维造型汽油机链轮室盖镗削夹具的设计 基于三维造型汽油机链轮室盖铣削夹具的设计 教务办 制
工业设计三位一体实践教学创新研究

业特点 , 建立产 、 学、 研相结 合的教学机制 、 实践 基地 , 构建切 实 可行 的实践性教学体 系 已是 当务之 急。
工 业 设 计 的本 质 是 满 足 社会 需 求 , 在 这 一层 次 上 , 作 为
工 业设 计 专 业 课 程 包 括 设 计 理 论 模 块 、 造型基础模块 、 设 计
二、 工业 设计 的教 学现状
虽然 经过近 2 0 年 的改革 , 设计教 育有 了巨大变化 , 但 由于 中 国的工 业设 计脱胎 于传 统 的美 术教育 , 所 以 目前不少高校 工业 设 计教 学工作 仍然 是“ 重艺轻技” , 即注重产 品造型和产 品设 计 表现, “ 画设计” “ 画 图案” , 学生 画出来 的效果 图很 美观 , 但设计
的创造活动的实践领域 。
工业设计 的专 业属 性 , 决定 了工业设计教 育建立 实践教 学 体 系的必 要性 。工 业设计 是工 业现代化 和 市场 竞争 的必然产 物, 所探 讨的是人 的生活本体如何 以物质化 的形式展现 出来, 所 以其发展不是单纯 的艺术学所能概括 的。工业设计是 多学科 的
工 业设计 学科 领域是 一个囊括所 有关于人 类衣食住行 、 工 作 娱乐各项所需之相关物 、 相关环境 的研 究与创造 的专 业领域 ;
是 一个 以人 为本 , 以优化 人类 生存环境 为 目的 , 为人 类构 筑安
全、 舒适 的生活环境 , 为保证 和满足人 类身心各层 面的需求 , 以 高度 的环境保 护意识和 深切 的人 性关怀 , 从事种种 “ 物” 与“ 事”
极 大地提 高 了产 品的附加值 , 给企业带来丰厚 的经济 收益 , 也为 人们创造 了一种新 的更合理 、 更美好 的生活方式。
“三位一体”的钱伟长
每个人的一生当中,都会面临着许多次的选择。
绝大多数人在做这样选择的时候,都会以他自身的需求作为出发点。
所以当我们听到,有的人说他一生当中,所有重大的选择都是为了这个国家的时候,我们也许会有一丝的不相信,但是假如您坐下来,静静地听钱伟长讲他过去的故事,也许您会发现,正是因为他始终坚持了这样的选择,钱伟长才成就了他不平凡的一生。
传承一种纯粹的爱国热情且不说在新中国成立前,钱老如何放弃国外的优越条件坚持回到祖国,即使是上世纪六、七十年代遭遇错误打击和迫害的特殊历史时期,钱老也没有放弃为国家建设贡献力量,顽强地开展“地下咨询”:他曾在李四光的恳求下,研究了测量地引力的初步设想措施;为国防部门建设防爆结构、穿甲试验、潜艇龙骨计算提供咨询;为人民大会堂眺台边缘工字梁的稳定提出增强方案……而到了晚年,钱老仍然担任了许多社会职务,推动众多社会事业的发展。
“前辈们极具爱国精神,很多人都是在祖国最需要的时候不远万里、费尽周折从国外返回,一生为中国的科技发展奠定基础、作出贡献。
”“三钱”等老一辈科学家的爱国热情不仅感动了后辈,更直接影响并带动了一批又一批留学归国人才。
“虽然都是凭着一腔爱国热情回到祖国,但现在的祖国早已非昔日可比。
现在的归国人才更希望成就一番事业,为祖国的繁荣昌盛添砖加瓦。
但钱老他们那一代人不一样,他们回来的时候,可能要面临几乎一切工作都是零起点的状况。
可以说,他们是凭着一种纯粹的爱国热情,将生命与自己从事的科学事业融在了一起。
这种精神值得我们传承。
”继承一种探索无止境的理念钱伟长是中科院资深院士,历任美国加州理工学院力学研究所研究员,中科院力学研究所副所长,自动化研究所所长,英文《应用数学和力学》杂志主编。
作为科学巨擘,钱伟长不仅在固体力学和流体力学领域成果卓著,更因为涉猎领域广泛被人戏称为“万能科学家”。
钱老这种科研探索无止境的理念,对自己的科学研究和自身成长有潜移默化的影响。
“就像现在做项目,有时候也会需要我们改变原先的方向,学习一些新的东西,有时候也会犹豫、彷徨。
用“产学研三位一体”模式培养应用化学创新人才
和创新精神对从事应用化学行业的人来说尤为重要。 但是以前高等教育培养模式对学生的创新能力培养 不够 , 毕业生职场上竞争力不强 , 在工作 岗位上不能 独立 的处理新 问题 。因此 对应 用 化 学 专业 的本 科生 加强创新能力的培养非常必要。要培养创新能力 , 首 先要解决创新人才培养模式 的问题 , 由此 , 产学研 “
日 望些 窒险 题
应用化学专业 的本科生大四的最后一个学期是
其 毕业论 文设 计 阶段 , 这段 时 间学生要 在老师 的指导 下 独立 的完成 毕业论 文 , 个 阶段是培 养学生创 新 能 这 力的最重 要 的时期 。学 生可 以把在 实 习 中发 现 的 问
体” 培养模式来培养学生的创新能力。
的需求。④ 培养学生发现和解决问题的能力 : 积极 鼓励 学生 在实 习过 程 中寻 找 和发 现 企业 在运 行 过 程
中存在的问题 , 提供给企业作为参考 , 也可 以作为学 生毕业论文的选题素材。让他们 自己设计方案解决 自己发 现 的、 书本上 没 有 遇 到 的问题 , 以提 高其 积 可 极性 。培 养其创 新 能力 J 。
三位一 体” 才培养 模 式成 为培 养 创新 人 才 的热 点 , 人 受到 高校 的广泛关 注¨ 。
产事故。③ 深入了解企业生产环节: 应用化学专业 培养 的本科生大多都要到企业生产一线的, 熟悉企业 的生 产不但 可 以让毕 业 生走 上 工 作 岗位 后 能迅 速 的
成 长为合 格 的技术 人员 , 缩短 成 才 周期 , 而且 减 少 了 企业 人才 培养成 本 , 足企业 对应 用化学应 用型人 才 满
第2 2卷第 1 1期 20 0 8年 1 1月
化 工时 刊
Ch m ia I d s r i e e c u ty T m s ln
西南科技大学获国家级科技成果奖
西南科技大学获国家级科技成果奖一、西南科技大学获国家级科技成果奖序号成果名称主持人获奖时间获奖情况备注1 绵农2号姊妹系绵农3号小麦新品种的选育刘碧贵 1998 国家科技进步二等奖2 地下矿山低贫化放矿与合理开采技术的研究(张志贵) 刘兴国 1998国家科技进步三等奖合作3 VA菌根主要生物学特性及应用(冉成玺) 汪洪钢 1994 国家科技进步三等奖合作4 骨干亲本蜀恢527及重穗型杂交稻的选育与应用(陶诗顺) 李仕贵2009 国家科技进步二等奖合作5 柴达木铅锌多金属资源高效利用及节能减排关键技术集成与应用(罗学刚) 林大泽 2009 国家科技进步二等奖合作二、西南科技大学获省部级科技成果奖序号成果名称主持人获奖时间获奖情况备注1 糯选一号的选育和推广龙太康 1983 四川重大科技成果三等奖2 优质稻种涪江二号的选育龙太康 1986 四川省科技进步三等奖3 四川植棉新技术系列规范化谭云汉 1987 四川省科技进步二等奖4 军工炸药边角余料利用张志呈 1988 四川省科技进步三等奖5 杂交水稻亲组合二汕63、八汕63 龙太康 1989 四川省科技进步三等奖6 我国西北地区超镁铁质岩型纤蛇纹石石棉矿床成矿地球化学作用及远景评价万朴 1989 四川省科技进步三等奖7 湖北荆门石膏矿采场地区测定肖正学 1990 湖北省科技进步二等奖8 切槽爆破新技术张志呈 1990 四川省科技进步三等奖9 成分闭环配料微机集散控制系统吴坚 1991 四川省科技进步三等奖10 绵农一号小麦的选育刘碧贵 1992 四川省科技进步三等奖11 VA菌根主要生物学特性及应用冉成玺 1993 农业部科技进步一等奖合作12 定向断裂控制爆破理论研究张志呈 1993 四川省科技进步二等奖13 陕南黑木林水镁石蛇纹石及其开发利用董发勤 1994 陕西省科技进步二等奖14 绵农二号、三号小麦的选育刘碧贵 1994 四川省科技进步二等奖15 南京石膏矿全面拉底房柱采矿法中深孔爆破落矿工艺试验研究蔡本裕1994 四川省科技进步三等奖16 苏州阳山高岭土矿床地质地球化学特征及成因研究田煦 1994 四川省科技进步三等奖17 工业过程随机稳态优化控制理论与算法黄正良 1995 教育部科技进步二等奖合作18 内陆高新技术产业开发区发展战略研究黄正良 1995 四川省科技进步三等奖合作19 低脆性钢渣道路硅酸盐水泥的研制钱光人 1995 四川省科技进步三等奖20 爆破基础理论与设计施工技术张志呈 1995 四川省科技进步三等奖21 绵农二号及姊妹系小麦品种推广邢国风 1996 四川省科技进步二等奖22 绵农二号及姊妹系小麦品种推广邢国风 1996 教育部科技进步三等奖23 崩落矿岩移动规律研究成果的推广应用(张志贵) 刘兴国 1996 国家教委科技进步三等奖合作24 应用新型矿化剂煅烧水泥研究方荣利 1996 四川省科技进步三等奖25 超镁铁质岩建造中镁质非金属矿床成矿系列万朴等 1996 四川省科技进步三等奖26 地下矿山开采低贫化放矿与合理技术措施的研究(张志贵) 刘兴国1997 冶金部科技进步一等奖合作27 绵农四号小麦新品种的选育刘碧贵 1997 四川省科技进步二等奖28 聚能装药民用爆破研究林秀英 1997 四川省科技进步三等奖29 中熟杂交水稻新组合D优501、二汕优501的选育谢崇华 1997 四川省科技进步三等奖30 切槽爆破的基础理论与扩大应用范围的研究张志呈 1997 四川省科技进步三等奖31 微差爆破振动谱解析张志呈 1998 中国工程物理研究院二等奖32 应用矿物学万朴 1998 湖北省科技进步三等奖33 柚矮化砧木的选择利用与推广王丹 1998 教育部科技进步三等奖34 柚矮化密植早结丰产栽培技术研究肖慈木 1998 四川省科技进步三等奖35 重穗型杂交水稻新组合冈优501 谢崇华 1998 四川省科技进步三等奖36 结构体爆破的研究与应用张志呈 1998 四川省科技进步三等奖37 杂交水稻新恢系绵恢501的选育与应用龙太康 1999 四川省科技进步二等奖38 超微粉气流分级技术的研究与应用陈海焱 1999 四川省科技进步三等奖39 纤维水镁石(FB)的应用矿物学研究董发勤 1999 四川省科技进步三等奖40 多元工业副产物复合配料煅烧硅酸盐水泥熟料的研究霍冀川 1999四川省科技进步三等奖41 名特产水果苍溪雪梨贮藏保鲜研究罗学刚 1999 四川省科技进步三等奖42 绵农4号小麦品种推广邢国风 2000 四川省科技进步二等奖43 大型混凝土生产线现场总线FCS与综合自动化系统吴坚 2000 四川省科技进步三等奖44 镁质(纤维水镁石)无机阻燃母料的研制与开发研究董发勤 2001 四川省科技进步三等奖45 利用多种工废渣生产普通硅酸盐水泥研究(卢忠远)2001 四川省科技进步三等奖合作46 籼型新不育系CA的选育与应用谢崇华 2003 四川省科技进步三等奖47 降低深孔爆破震动强度的试验研究(肖正学) 向开伟 2003 广西省科技进步三等奖合作48 非洲裔美国黑人小说及其传统刘捷 2003 四川哲学社会科学优秀成果二等奖49 籼型新不育系红矮A的选育与应用谢崇华 2004 四川省科技进步三等奖50 岩体经验强度准则研究(于远忠) 宋建波 2005 贵州省科技进步三等奖合作51 重穗型杂交稻的高产机理及其稀植优化生产技术的研究与应用(陶诗顺)任光俊 2006 四川省科技进步一等奖合作52 环境友好的天然木素热塑材料应用研究罗学刚 2006 四川省科技进步二等奖53 高性能矿渣粉生产工艺及应用卢忠远 2006 四川省科技进步二等奖54 基于国产软硬件的乡村教育信息化应用平台刘志勤 2006 四川省科技进步三等奖55 钢管超高强混凝土的研究与开发谭克锋 2006 中国建筑材料科学技术三等奖56 天然纤维水镁石多功能复合粉体材料的研发董发勤 2006 中国建筑材料科学技术三等奖57 钻井液用改性植物纤维快速封闭暂堵剂研究与开发罗学刚 2006 中国石油和化学科学技术三等奖58 方解石型低品位海泡石矿工业提纯方法研究周时光 2006 中国有色金属工业科学技术三等奖59 天然纤维水镁石深加工及其应用开发董发勤 2006 中国有色金属工业科学技术三等奖60 证券法律责任侯泽福 2006 四川哲学社会科学优秀成果二等奖61 制度变迁中的西部经济发展胡树林 2006 四川哲学社会科学优秀成果三等奖62 经济学家王朝全 2006 四川哲学社会科学优秀成果三等奖63 高校产业安全的理论与实践(胡树林) 杨继瑞 2006 四川哲学社会科学优秀成果三等奖合作64 基于人体动觉智能图式的仿人智能控制理论(张华) 李祖枢 2006 重庆市科学技术二等奖合作65 魔芋葡甘聚糖热塑新材料应用研究罗学刚 2007 四川省科学技术进步二等奖66 杂交水稻高配合力强恢复系绵恢2009的选育与应用谢崇华 2007 四川省科学技术进步三等奖67 儿童心理卫生保健的应用研究(王汝恒) 文红 2007 四川省科学技术进步三等奖合作68 D615-1快固化高强度环氧多胶玻璃粉云母带(卢忠远) 伍尚华 2007四川省科学技术进步三等奖合作69 依靠科技,促进四川循环经济发展研究(邓金堂) 赵毅峰 2007 四川省科学技术进步三等奖合作70 高纯木素的提取与产业化应用研究罗学刚 2007 中国石油和化学科学技术进步一等奖71 湘黔地区下寒武统黑色岩系铂族元素低温地球化学研究易发成 2007中国有色金属工业科学技术二等奖72 青藏高原矿冶重金属废水生物质吸附材料的研制与应用罗学刚 2007中国有色金属工业科学技术二等奖73 超大深埋隧道及硐室围岩稳定性微地震监测试验研究林大泽 2007中国有色金属工业科学技术三等奖74 蛇纹石矿作水泥混合材的研究卢忠远 2007 中国有色金属工业科学技术三等奖75 重穗型杂交稻的高产机理及其稀植优化生产技术的研究与应用(陶诗顺)任光俊 2007 农业部中华农业科技三等奖合作76 天然木素热塑发泡材料的研究罗学刚 2007 国防科学技术进步三等奖77 生态复合功能涂料开发董发勤 2008 四川省科学技术进步三等奖78 中文网络信息UCL分类及标引技术马建国 2008 四川省科学技术进步三等奖79 多采样率控制技术及其在矿山运输与高速接触网检测中应用研究(蔡勇)肖建 2008 四川省科学技术进步三等奖合作80 魔芋葡甘聚糖热塑新材料应用研究罗学刚 2008 中国石油和化学科学技术进步二等奖81 护壁爆破机理及应用研究肖正学 2008 国防科技进步三等奖82 岩石动态损伤机理与护壁爆破的应用研究肖正学 2008 中国建筑材料科学技术二等奖83 放射性核素与固化材料的作用机理研究易发成 2008 中国建筑材料科学技术三等奖84 D125无卤阻燃树脂(刘才林) 刘峰 2008 中国机械工业科学技术三等奖合作85 立方氮化硅的冲击波合成研究(唐敬友) 刘雨生 2008 军队科技进步三等奖合作86 新型广义预测控制算法及其在复杂工业过程控制中的应用(尚丽平) 郑德忠2008 中国机械工业科学技术三等奖合作87 高配合力优质新质源不育系803A的创制及应用谢崇华 2009 四川省科学技术进步一等奖88 四川杂交中稻丰产高效技术集成研究与示范推广(陶诗顺) 任光俊2009 四川省科学技术进步一等奖合作89 四川主要丛生竹定向培育关键技术集成与产业化示范推广(胡尚连) 陈其兵2009 四川省科学技术进步一等奖合作90 可吸入呼吸性粉尘与人体三种正常细菌相互作用的微生态机制研究(董发勤) 邓建军 2009 四川省科学技术进步奖三等合作91 共享信息的播存结构李幼平 2009 四川省科学技术进步奖三等92 新型广义预测控制算法与锅炉工程(尚丽萍) 郑德忠 2009 河北省科学技术二等奖合作93 四川盆地中生代恐龙动物群研究(梁斌) 王全伟 2009 国土资源科学技术二等奖合作94 青藏高原矿冶废水生物质吸附沉淀剂研制与应用罗学刚 2009 青海省科技进步一等奖合作95 附子的系统研究与开发应用(侯大斌) 彭成 2010 四川省科学技术进步一等奖合作96 高纯木素的提取与产业化关键技术应用研发林晓燕 2010 四川省科学技术进步二等奖97 碳酸钙制备红色稀土荧光材料的研究康明 2010 四川省科学技术进步三等奖98 防氡防辐射砌筑水泥/腻子/涂料及其复合体的开发董发勤 2010 四川省科学技术进步三等奖99 复合硅酸盐硬质保温隔热板(FHP-Vc)节能技术研究李嘉华 2010 四川省科学技术进步三等奖100 四川省矿产资源规划环境影响评价关键技术研究王青 2010四川省科学技术进步三等奖101 利用多种固体废渣协同生产绿色水泥的研究(卢忠远) 王国成2010 四川省科学技术进步三等奖合作102 监禁刑现代化研究廖斌2010 四川省哲学社会科学优秀成果二等奖103 汉语词缀研究蒋宗许 2010 四川省哲学社会科学优秀成果三等奖104 1:25万石渠县幅区域地质调查项目王全伟 2010 国土资源科学技术二等奖合作105 5440-1D 单面补强多胶主绝缘材料开发伍尚华 2010 中国石油和化学工业科学技术三等奖合作106 SLK高细粉分级机流场特性及结构特征研究李双跃 2010 中国建筑材料科学技术三等奖合作107 ICF用低密度SIO2气凝胶快速成型及可加工性研究2010 中国人民解放军科技进步二等奖合作108 全啁啾镜色散控制钛宝石飞秒激光振荡器(邱荣)2010 中国人民解放军科技进步二等奖合作109 新型γ射线防护特殊手套生产线的建立(周元林)2010 中国人民解放军科技进步三等奖合作110 含能富勒烯衍生物的制备技术彭汝芳 2010 国防科学技术进步二等奖111 高产广适杂交水稻B优811选育与应用(谢崇华) 张致力 2010重庆市科技进步三等奖合作112 蛋鸡产业化技术研究与示范(何健) 冯光德 2011 四川省科技进步二等奖合作113 5440-1D 单面补强多胶主绝缘材料开发伍尚华 2011 四川省科技进步三等奖合作114 高性能柔性膨胀蛭石节能矿物材料的制备技术研究彭同江 2011四川省科技进步三等奖115 电石渣改性磷石膏生产水泥缓凝剂工艺技术研究(卢忠远) 靳武士2011 四川省科技进步三等奖合作116 高温、高压、强辐射对生化制剂破坏的模拟研究?(陈晓明)2011 中国人民解放军科技进步三等奖合作三、西南科技大学获地市级科技成果奖序号成果名称主持人获奖时间获奖情况备注1 综合治理含氟废气,利用什邡系磷矿生产磷酸二氢钾和固体磷铵黄尚勋1982 绵阳市科技进步二等奖2 TDP对提高西门塔尔种公牛精液品质研究孙文厚 1985 四川省教育厅科技成果三等奖3 中草药防治鸡球虫病的研究董华富 1985 绵阳市科技进步三等奖4 杂交水稻新组合八汕63的选育龙太康 1987 绵阳市科技进步一等奖5 WKL-I型微机控制配料系统何幼愚 1988 绵阳市科技进步二等奖6 杂交水稻新组合二汕优63的选育谢崇华 1988 绵阳市科技进步二等奖7 微机排课调课系统徐明民 1988 绵阳市科技进步二等奖8 新的产毒性大肠杆菌硫化氢阳性变种的分离鉴定林永祯 1988 绵阳市科技进步三等奖9 进口新西兰黑白花奶牛适应性研究赖德华 1989 绵阳市科技进步一等奖10 绿豆品种资源的开发利用研究谢长茂 1989 绵阳市科技进步三等奖11 调痢生防治仔猪黄白痢病的应用研究林永祯 1990 德阳市科技进步二等奖12 绵农一号小麦的选育刘碧贵 1991 绵阳市科技进步一等奖13 甘薯蔓割病发生危害损失及控制对策研究左华清 1991 绵阳市科技进步二等奖14 稀土在麦冬上的应用熊光华 1991 绵阳市科技进步三等奖15 陕南黑木林水镁石蛇纹石及其开发利用董发勤 1992 汉中地区科技进步一等奖16 定向断裂控制爆破理论研究张志呈 1992 绵阳市科技进步一等奖17 杂交水稻新组合二汕63、八汕63的推广谢崇华 1992 四川省教委科技进步三等奖18 绵农二号小麦的选育刘碧贵 1992 绵阳市科技进步一等奖19 VA菌根真菌再农作物上应用效果冉成玺 1992 绵阳市科技进步三等奖20 四川三台西平镇技术综合开发试点镇陶诗顺 1992 绵阳市科技进步三等奖21 南京石膏矿全面拉底房柱采矿法中深孔爆破落矿工艺试验研究蔡本裕1993 绵阳市科技进步三等奖22 绵农三号小麦的选育刘碧贵 1993 绵阳市科技进步一等奖23 新型高效选粉机刘继光 1993 绵阳市科技进步一等奖24 杂交水稻新组合II优501 龙太康 1993 绵阳市科技进步一等奖25 主要园林绿化树种重点病害极其防治左华清 1993 绵阳市科技进步二等奖26 绵阳市农业区域开发规划的目标设计及方案优化研究王朝全 1993绵阳市科技进步三等奖27 爆破基础理论与设计施工技术张志呈 1994 绵阳市科技进步二等奖28 低脆性钢渣道路硅酸盐水泥的研制钱光人 1994 绵阳市科技进步三等奖29 杂交水稻新组合二汕优501 谢崇会 1994 绵阳市科技进步一等奖30 CO2激光陶瓷超细粉末的研究陶相国 1994 绵阳市科技进步三等奖31 北川县优势矿产资源评价与利用童光庆 1994 绵阳市科技进步三等奖32 山地林茶多经开发研究朱传松 1994 绵阳市科技进步三等奖33 柚矮化砧木选择的研究肖慈木 1995 绵阳市科技进步一等奖34 杂交水稻新组合D优501 谢崇华 1995 绵阳市科技进步二等奖合作35 绵农二号、三号小麦品种的推广邢国风 1995 绵阳市科技进步二等奖36 聚能装药民用爆破研究林秀英 1995 绵阳市科技进步三等奖合作37 一种天然矿物肥料--蛇纹石对作物增产效益研究万朴1995 绵阳市科技进步三等奖38 杂交水稻新恢系绵恢501的选育与应用龙太康 1996 绵阳市科技进步一等奖39 绵农四号小麦新品种的选育刘碧贵 1996 绵阳市科技进步一等奖40 绵农四号小麦的推广邢国风 1996 四川省教委科技成果推广一等奖41 绵恢501系列组合的推广谢崇华 1996 四川省教委科技进步二等奖42 硝酸盐在蔬菜中的积累规律及调空措施的研究王双明 1996 绵阳市科技进步二等奖43 獭兔养殖综合技术研究赖德华 1996 绵阳市科技进步三等奖44 道路硅酸盐水泥霍冀川 1996 峨眉山市科技进步一等奖45 低产茶园的改造朱传松 1996 德阳市科技进步三等奖46 柚矮化砧木的选择利用与推广王丹1997 省教委科技进步二等奖47 动态系统模型辨识与稳态优化研究黄正良 1997 四川省教委科技进步三等奖48 大型移动式混凝土搅拌楼及其控制技术研究李众立 1997 四川省教委科技进步三等奖49 中西药物诱导不孕奶牛泌乳研究何洪智 1997 绵阳市科技进步二等奖合作50 自适应动态结构数据采集系统王成端 1997 绵阳市科技进步二等奖51 RCC拌合设备微机集散控制系统吴坚1997 绵阳市科技进步二等奖52 结构体爆破的研究与应用张志呈 1997 绵阳市科技进步二等奖53 多元工业副产物复合配料煅烧硅酸盐水泥熟料的研究霍冀川 1997乐山市科技进步二等奖54 重穗型杂交水稻新组合冈优501 谢崇华 1998 四川省教委科技进步一等奖55 改革开放以来我国农民收入差距状况实证分析与研究杨启地 1998四川社科优秀科研成果三等奖56 转变农业经济增长方式的研究李燕琼 1998 四川省教委人文社科二等奖57 纤维水镁石应用矿物学研究董发勤 1998 绵阳市科技进步二等奖合作58 高抗折高抗磨道路粉煤灰混凝土的研究李爱美 1998 绵阳市科技进步三等奖59 路桥收费自动化系统的研制李众立 1998 绵阳市科技进步三等奖60 微差爆破振动谱解析张志呈 1998 绵阳市科技进步三等奖61 早衰茶树复壮生态研究朱传松 1998 绵阳市科技进步三等奖62 我国农民收入增长的基本成因杨启地 1998 绵阳市哲学社科三等奖63 利用多种工业废渣生产普通硅酸盐水泥卢忠远 1998 都江堰市科技进步二等奖64 利用液态渣磷渣生产砌筑水泥霍冀川 1998 都江堰市科技进步三等奖65 绵阳市自然地理志王文鹄 1998 绵阳市哲学、社会科学科研成果一等奖66 绵农4号小麦品种推广邢国风 1999 绵阳市科技进步二等奖67 绵阳市自然地理志王文鹄 1999 四川省哲学社会科学科研成果三等奖68 大型混凝土生产线现场总线FCS与综合自动化系统吴坚1999 四川省教育厅科技进步二等奖69 坚持正规化管理,实施两极办学模式朱强1999 四川省教委人文社会科学科研成果三等奖70 杂交水稻多蘖壮秧少穴高产栽培技术研究陶诗顺 1999 绵阳市科技进步一等奖71 绵农5号小麦新品种选育刘碧贵 1999 绵阳市科技进步二等奖72 高性能混凝土增强剂的开发与应用及钢管超高强混凝土的研究与开发谭克锋 1999 绵阳市科技进步二等奖73 绵阳市人事局办公管理信息网络系统蔡勇 1999 绵阳市科技进步三等奖74 稻壳和统康膨化助膨剂的研制与应用罗学刚 1999 绵阳市科技进步三等奖75 放射性废物固化材料富铝碱矿渣粘土矿物复合胶凝材料钱光人 1999绵阳市科技进步三等奖76 试论邓小平的实践哲学徐云峰 1999 绵阳市哲学、社会科学科研成果二等奖77 正确理解和充分发挥绵阳市科技人才优势陈思哲 1999 绵阳市哲学、社会科学科研成果三等奖合作78 对法人犯罪刑罚适用的设想廖斌 1999 绵阳市哲学、社会科学科研成果三等奖79 高校董事会发展的切入点选择毛晓红 1999 绵阳市哲学、社会科学科研成果三等奖80 高校科技产业技术政策的若干问题初探童光庆 1999 绵阳市哲学、社会科学科研成果三等奖合作81 文献老化现象研究的历史评说俞培果 1999 绵阳市哲学、社会科学科研成果三等奖82 国外工程教育动向与我国工程教育改革的思考朱强 1999 绵阳市哲学、社会科学科研成果三等奖83 杂交中稻超多蘖壮秧超少穴高产栽培陶诗顺 2000 四川教育厅科技进步二等奖84 川西北丘区集镇规划方法探索李秀 2000 四川教育厅科技进步三等奖85 工业常用矿物粉尘表面理化特性对肺泡巨噬细胞毒性及防治的实验研究董发勤 2001 绵阳市科技进步一等奖86 浅色非金属矿物超细效应及其应用研究万朴 2001 绵阳市科技进步三等奖87 镁质(纤维水镁石)无机阻燃母料的研制与开发研究董发勤 2001 绵阳市科技进步三等奖88 籼型新不育系CA的选育与应用谢崇华 2001 绵阳市科技进步三等奖89 绵阳市非金属矿跨世纪综合开发利用方案研究童光庆 2001 绵阳市科技进步三等奖90 中外国有企业管理特点和行为目标及其矛盾衡代清 2001 四川省教育厅人文社会科学研究成果三等奖91 生物大分子与光谱探针结合反应行为的基础理论及应用技术研究迟燕华2002 绵阳市科技进步二等奖92 最经济智能控制研究吴斌 2002 绵阳市科技进步二等奖93 水泥旋窑用无烟煤燃烧器的研究与开发谭克锋 2002 绵阳市科技进步三等奖94 入世:中国商业银行的机遇、挑战及对策代国强 2002 绵阳市哲学、社会科学三等奖95 绵阳科技城产业发展目标及优势产业、特色产业发展框架构想李富田2002 绵阳市哲学、社会科学二等奖合作96 资源市场化与西部城镇化道路卿向阳 2002 绵阳市哲学、社会科学三等奖97 边际效用与劳动价值论刘益 2002 绵阳市哲学、社会科学二等奖98 促进西部草原畜牧业发展的研究李燕琼 2002 绵阳市哲学、社会科学三等奖99 西部大开发战略之国际区域经济合作比较分析赵波 2002 绵阳市哲学、社会科学三等奖100 论城市特型文化邓金堂 2002 绵阳市哲学、社会科学三等奖101 论我国环境审计及其运作模式魏顺泽 2002 绵阳市哲学、社会科学二等奖102 四川省产学研联合技术创新基本情况调查研究--企业方面的调查分析朱强 2002 绵阳市哲学、社会科学三等奖103 农村剩余劳动力转移模式制约因素和对策研究衡代清 2002 绵阳市哲学、社会科学三等奖104 高等农林院校教学质量评价方案的研究与实践的研究报告苏培安2002 绵阳市哲学、社会科学三等奖105 我国农业合作化中的四次争论许建文 2002 绵阳市哲学、社会科学二等奖106 析网络环境中大学生思维方式的变化侯东成 2002 绵阳市哲学、社会科学三等奖107 浅谈"毛泽东思想概论"课程建设中的几种关系古世平 2002 绵阳市哲学、社会科学三等奖108 汉语隐语论纲郝志伦 2002 绵阳市哲学、社会科学一等奖109 论企业破产重整制度廖斌 2002 绵阳市哲学、社会科学二等奖110 绵阳城市文化研究程皓 2002 绵阳市哲学、社会科学一等奖合作111 农村创业人才专业素质结构与培养模式研究段宁 2002 绵阳市哲学、社会科学三等奖112 非洲裔美国黑人小说及其传统刘捷 2002 绵阳市哲学、社会科学二等奖113 走进当代文学张德明 2002 绵阳市哲学、社会科学三等奖114 政府多元利益目标的冲突与协调王朝全 2004 四川省教育厅人文社会科学研究成果三等奖115 经济势差与农村劳动力流向以四川省绵阳市调查为例李富田2004 四川省教育厅人文社会科学研究成果三等奖116 钢管超高强混凝土的开发与应用谭克锋 2004 绵阳市科技进步三等奖。
“三位一体”促进科技成果转化
24“三位一体”促进科技成果转化发明与创新杂志社匡建斌政府为主导市场为导向企业为主体当今世界,科技对经济社会发展的支撑引领作用越来越大,离开科技发展,任何国家和地区的经济都不可能强大。
科技竞争与经济竞争的联系也越来越紧密,科技竞争的核心问题已不完全是追求技术先进性,而是越来越体现在科技成果的商品化、产业化程度及其市场占有率。
经过几十年的发展,中国的科技事业已经取得了长足的进步,科研能力和科技水平有了很大提高,对经济社会的发展发挥了巨大的推动作用。
然而,现行的科技成果转化体系依然存在重视不够、市场化程度不高、企业吸纳技术能力弱、成果转化率低等诸多问题。
如何充分发挥科技在经济发展方式转变和经济结构调整中的支撑引领作用,关键在于加速科技成果的转化和产业化,建设适应社会主义市场经济环境的成果转化体系。
为此,广大科技工作者与企业经营者应共同努力,协同政府构建“政府为主导、市场为导向、企业为主体”三位一体的科技成果转化模式,为解决经济社会发展中的难点、热点、重点问题做出贡献。
在科技成果转化过程中,政府的引导和政策的支撑必不可少。
在一些奉行自由经济政策的发达国家,尽管政府尽量减少对市场的干预,但在科技成果转化中也都强调政府的主导作用。
比如美国对科学技术领域的干预,特别是对于一些基础技术和共性技术,从不直接支持到直接支持的干预范围正在不断扩大,甚至通过立法等手段,积极鼓励产学研合作;德国政府则对中小企业进行长期扶持,同时通过公立机构、行业联合会及政策性银行等构建中小企业社会化服务体系;法国规定,研究与发展投资比上一年增加的企业可以免交相当于研究与发展投资增加额25%的企业所得税,政府每年还通过国家创新署向中小企业提供技术创新无息贷款,以提高企业采用新工艺和新技术生产新产品的积极性。
发达国家尚且如此,作为发展中的中国应充分发挥政府的推动作用和政策的引导作用,不断完善科技成果转化保障机制。
1.建立风险投资体系,解决科技成果转化的投入问题。
以“三位一体”模式打造

以“三位一体”模式打造作者:徐建华来源:《科技资讯》 2014年第29期徐建华(国网浙江省电力公司衢州供电公司浙江衢州 324000)摘要:对于没有方向的船,任何方向的风都是逆风。
2005年8月“王建成劳模创新工作室”成立,共有成员20余人,其中共产党员15人、衢州市“115”人才1人、省公司人才2人、国家一级注册建造工程师3人、高级工程师11人。
作为衢州电力系统党员创新领军团队和“创新型”党组织建设示范点,王建成劳模创新工作室始终坚持“努力超越、追求卓越”,秉承“创业、创新、创造”的团队精神,通过对技术成果和学习成果的共享,公司依托工作室这个平台团队学习攻关,使团队智慧超过个人智慧的总和。
关键词:劳模创新人才培训专业技术企业管理创新中图分类号:G642.0 文献标识码:A 文章编号:1672-3791(2014)10(b)-0125-01工作室成立之初,在研发设备、工具、宣传展板等方面投入资金50多万元,确保工作室标志明显、场所固定、设施齐全。
公司自2005年每年按计划下拨研发经费,并引入风险投资管理模式,至今已使用研发经费240万元,科研成果产生效益近1200多万元,提高公司人均劳动生产率100%以上。
为此,“王建成劳模创新工作室”通过了浙江省总工会、浙江省科技厅、浙江省电力公司等多加上级主管单位的检查、考核、评审,最终被授予“浙江省高技能那人才工作室”“浙江省电力公司A级劳模工作室”等荣誉称号。
1 打造高技能人才队伍建设的具体做法衢州供电公司以“王建成劳模创新工作室”为平台,通过以“人才培养方法的创新、专业技术的创新、企业管理的创新”三位一体模式从科技队伍建设、技术带头人的培养、管理创新成果的应用几方面,深化师带徒作用,形成比、学、赶、帮、超的良好氛围,并根据不同情况和需要成立以传授岗位技能和经验为主的“责任型学习小组”,充分发挥团队学习创新的积极性,引领公司大批学习型团队、创新型团队的高技能人才队伍建设,进一步增强企业的核心竞争力。
完善石化化工创新机制,形成石化化工“三位一体”协同创新体系行动计划

完善石化化工创新机制,形成石化化工“三位一体”协同创新体系行动计划树牢底线思维,强化社会责任关怀,提升本质安全水平,推进绿色循环低碳开展,加强行业治理体系和治理能力建设。
一、推进产业数字化转型加快新技术新模式协同创新应用,打造特色平台。
加快5G、大数据、人工智能等新一代信息技术与石化化工行业融合,不断增强化工过程数据获取能力,丰富企业生产管理、工艺控制、产品流向等方面数据,畅联生产运行信息数据“孤岛”,构建生产经营、市场和供应链等分析模型,强化全过程一体化管控,推进数字李生创新应用,加快数字化转型。
打造3-5家面向行业的特色专业型工业互联网平台,引导中小化工企业借助平台加快工艺设备、安全环保等数字化改造。
围绕化肥、轮胎等关乎民生安全的大宗产品建设基于工业互联网的产业链监测、精益化服务系统。
推进示范引领,强化工业互联网赋能。
发布石化化工行业智能制造标准体系建设指南,编制智能工厂、智慧园区等标准。
针对行业特点,建设并遴选一批数字化车间、智能工厂、智慧园区标杆。
组建石化、化工行业智能制造产业联盟,培育具有国际竞争力的智能制造系统解决方案供应商,提升化工工艺数字化模拟仿真、大型机组远程诊断运维等服务能力。
基于智能制造,推广多品种、小批量的化工产品柔性生产模式,更好适应定制化差异化需求。
实施石化行业工业互联网企业网络安全分类分级管理,推动商用密码应用,提升安全防护水平。
二、推动产业结构调整强化分类施策,科学调控产业规模。
有序推进炼化工程“降油增化”,延长石油化工产业链。
增强高端聚合物、专用化学品等产品供给能力。
严控炼油、磷锭、电石、黄磷等行业新增产能,禁止新建用汞的(聚)氯乙烯产能,加快低效落后产能退出。
促进煤化工产业高端化、多元化、低碳化开展,按照生态优先、以水定产、总量控制、集聚开展的要求,稳妥有序开展现代煤化工。
加快改造提升,提高行业竞争能力。
动态更新石化化工行业鼓励推广应用的技术和产品目录,鼓励利用先进适用技术实施安全、节能、减排、低碳等改造,推进智能制造。
探索高等院校人才,学科,科研三位一体的协同创新培养模式
探索高等院校人才,学科,科研三位一体的协同创新培养模式1. 引言1.1 背景介绍在当今社会,高等教育在培养人才、促进科研和推动创新方面起着至关重要的作用。
随着社会的快速发展和科技的迅速变革,高等院校人才培养、学科建设和科研创新也面临着新的挑战和机遇。
在传统的人才培养模式中,高等院校通常注重学生的专业知识和技能培养,但缺乏对学生创新能力和实践能力的培养。
学科建设方面,一些学科虽然取得了一定的成绩,但在面临国际竞争时,仍存在许多弱势和不足之处。
而科研创新方面,高校科研工作往往与学科建设和人才培养相割裂,导致科研成果无法有效地转化为人才培养和学科建设的动力。
探索高等院校人才、学科、科研三位一体的协同创新培养模式已成为当前高等教育改革的当务之急。
通过整合资源、优势互补、协同发展,可以实现人才培养、学科建设和科研创新的有机结合,推动高等教育朝着更高水平、更具竞争力的方向发展。
【2000字】1.2 问题提出在当今社会,高等院校人才培养一直是一个备受关注的话题。
随着社会的不断进步和发展,人才的需求也在不断增加,对高等院校人才培养提出了更高的要求。
在传统的人才培养模式下,学生的知识面狭窄,创新能力不足,缺乏实践经验等问题依然存在。
问题的提出主要有以下几点:现行的人才培养模式往往只注重学生的理论知识学习,忽视了实践能力的培养,导致学生毕业后无法适应社会的发展需求。
学科建设模式往往是单一的,缺乏跨学科的合作与交流,无法满足综合性人才的需求。
科研与创新能力培养方面也存在一定的问题,学生缺乏独立思考和创新能力,无法在实践中应用所学知识。
如何打破传统的人才培养模式,构建一种高等院校人才、学科、科研三位一体的协同创新培养模式,提高学生的综合素质和创新能力,已成为当前亟待解决的问题。
通过探索新的人才培养模式,可以更好地满足社会对优秀人才的需求,促进高等院校的长远发展和社会进步。
1.3 意义高等院校人才、学科、科研三位一体的协同创新培养模式具有重要的意义。
刘景泰教授个人简介
刘景泰教授个人简介一、基本信息刘景泰教授,博士生导师,现任南开大学机器人与信息自动化研究所副所长,曾任国家863计划智能机器人主题工业机器人专业专家组成员。
共济专1979年9月入天津大学自动化系。
1983年获天津大学工学学士学位,专业方向是自动化;1986年获天津大学工学硕士学位,研究方向是微机控制系统;1998年获南开大学工学博士学位,研究方向是机器人学。
336 26038ka1986年开始一直在南开大学工作,分别在1988年、1991年和1998年被南开大学聘为讲师、破格聘为副教授和教授。
1997年遴选为国家863计划智能机器人主题工业机器人专业专家组成员。
正门对面业刘景泰1986年来到南开大学后,便很快投身863科研项目,长期安心于科研、教学工作。
对学生尽心尽责,对本职工作有强烈的事业心和责任感。
在多项“863”科研项目中起了关键作用,协助卢桂章教授创建了南开大学机器人研究室,并发展为863计划机器人主题开放实验室,使南开大学成为我国进行机器人高科技研究的基地之一。
021-共刘景泰教授曾担任863计划机器人主题工业机器人专题专家组成员,在国内机器人研究的学者中也具有一定影响。
2001年,刘景泰教授获得了863计划15周年贡献奖。
经过十几年有意识的艰苦努力,目前已经形成以卢桂章教授为核心的,以中青年教师为主体的研究群体,这样的群体在南开大学非常有优势。
在研究方面,南开大学机器人所同样取得了优异成绩,无论在人均科研经费数,还是在人均科研成果数,均处于国内相关学科的领先水平。
在面向生物医学工程的微操作机器人系统、基于远程网络的机器人遥操作、多机器人系统及其协调控制、用于MEMS快速原型设计的虚拟现实系统等方面取得了国内领先的研究成果。
近年来,获得国家攻关项目、863计划、攀登计划、国家自然科学基金项目20余项,累计科研经费超过500万元。
获天津市攻关,青年基金资助多项,总金额数十万元。
业济在教学方面,刘景泰近些年一直主讲研究生的《机器人学》,每年60学时。
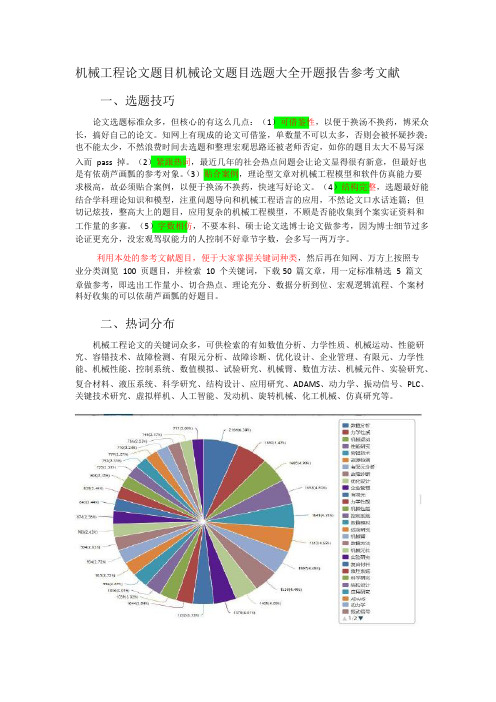
机械工程论文题目机械论文题目选题大全开题报告文献综述
一、选题技巧
论文选题标准众多,但核心的有这么几点:(1)可借鉴性,以便于换汤不换药,博采众 长,搞好自己的论文。知网上有现成的论文可借鉴,单数量不可以太多,否则会被怀疑抄袭; 也不能太少,不然浪费时间去选题和整理宏观思路还被老师否定,如你的题目太大不易写深 入而 pass 掉。(2)紧跟热词,最近几年的社会热点问题会让论文显得很有新意,但最好也 (3)贴合案例,理论型文章对机械工程模型和软件仿真能力要 是有依葫芦画瓢的参考对象。 求极高,故必须贴合案例,以便于换汤不换药,快速写好论文。(4)结构完整,选题最好能 结合学科理论知识和模型,注重问题导向和机械工程语言的应用,不然论文口水话连篇;但 切记炫技,整高大上的题目,应用复杂的机械工程模型,不顾是否能收集到个案实证资料和 工作量的多寡。(5)字数相仿,不要本科、硕士论文选博士论文做参考,因为博士细节过多 论证更充分,没宏观驾驭能力的人控制不好章节字数,会多写一两万字。 利用本处的参考文献题目,便于大家掌握关键词种类,然后再在知网、万方上按照专 业分类浏览 100 页题目,并检索 10 个关键词,下载 50 篇文章,用一定标准精选 5 篇文 章做参考,即选出工作量小、切合热点、理论充分、数据分析到位、宏观逻辑流程、个案材 料好收集的可以依葫芦画瓢的好题目。
基于 ROS 的同位素分装机器人运动规划及控制仿真研究 二自由度机械臂运动控制及试验研究 铣车复合加工中心直驱摆头动力刀架支架轻量化设计 高锰钢辙叉机械冲击预硬化的研究 仿人柔性臂的交互控制研究 面向视觉三维测量的机器人手眼标定技术研究 具有有限性能关节的机械臂最优轨迹控制方法及避障研究 基于 DQN 的机械臂控制策略的研究 多年冻土区路基填土力学性质变化及长期变形研究 CANDU-6 核燃料元件制造成型工序自动化研究 探索细胞内主动机械力的产生 NW 型风电增速器的非线性动力学建模与综合性能优化设计 航空发动机叶片自动装配控制系统研究 新型抗负载波动大惯量回转控制阀动态特性优化设计 轴流泵水力模型优化设计方法及关键技术研究 底部扫描光固化 3D 打印机的研制 煤矿主扇风机在线监测监控与故障诊断系统 基于 PLC 的画家座椅的研制与开发 离心式热媒泵结构设计和优化 基于 ADAMS 的空间四杆机构参数化建模分析优化系统研发 椎板磨削手术机器人的设计与研究 嵌套试验设计在机械设备优化设计中的应用研究
科学学科“探究—实践—提升”三位一体线上教研模式
科学学科“探究—实践—提升”三位一体线上教研模式在疫情延续期间的特殊环境下,线上教学成为教师授课的主要方式。
在“互联网+时代”,教研方式需要转型,以提升教研实效,促进教师专业发展。
构建理念正确、过程科学的教研模式,对保证团队合作教研的有效性具有重要价值。
科学组教师也在探索着线上教育教学的新路径,积极建构网络教研平台,集资源共享、在线互动、智能推送、学习分析于一体,落实云端教研,经过不断的努力,构建出“探究—实践—提升”三位一体的线上教研模式。
一、三位一体线上教研模式的确定基于“线上教研活动”的实践,依据爱德华·索亚的“第三空间”理论,以新课程实施过程中教师所面对的各种具体问题为对象,以教师为研究主体,强调理论指导下的实践性研究,既注重解决实际问题,又注重经验的总结、理论的提升、规律的探索和教师的专业发展。
教研组以“提高学生线上学习的有效性”为本学期的教研主题开展研讨,整合自我反思、同伴互助、专家引领的教研基本方式,提升总结出适合本学科的线上教研模式。
二、三位一体线上教研模式的解析教研组教师通过十几周的线上教研,逐步形成了以信息为载体,以探究为根基,以实践为手段,以提升为目标的“探究-实践-提升”三位一体的线上教研模式。
“探究”:教师首先个人钻研教材,设计教学活动形成个性教案。
在网络教研平台分享,研讨,形成共性教案。
“实践”:教师把实施线上教学及反思记录教学的得失,在线上交流研讨,包括学生自主学习、网络互动、学习效果等,对课堂中出现或存在的共性问题进行探讨,商量对策。
通过网络教研共同讨论,总体研究后,形成有效教案。
“提升”:教师以课例观摩为主题在网络教研过程进行交流,并在此基础上进行教学方法、方式的拓展,进行总结提升,形成不同风格的教学活动方式。
这种教研模式是对常规教研与网络教研的有机整合,是“互联网+”的教研模式,是一种新型网络教研模式。
三、三位一体线上教研模式的构建过程(一)探究问题,确定主题科学课程的主旨是通过实验探究引导学生学习,由于疫情的特殊时期,学生实验探究有一定的困难,但这并没有阻止教师进行研究,针对出现的各种实验探究方面的问题,老师们把问题归类,共同研究,确定主题,利用身边的有效资源进行线上探究。
教育科技人才‘三位一 体’的内在逻辑与协同机制
教育科技人才‘三位一体’的内在逻辑与协同机制教育科技人才“三位一体”的内在逻辑与协同机制教育科技人才“三位一体”是指培养既有教育背景、又有科技技能、同时具备创新意识和能力的复合型人才。
这种人才在当前互联网智能化时代的教育发展中至关重要。
教育科技人才“三位一体”的内在逻辑与协同机制主要体现在以下几个方面:1. 教育与科技的融合:教育科技人才需要具备教育背景,了解教育理论和实践,并能将科技与教育有效地结合起来。
通过科技手段来提升教育教学的效率和质量,开发创新教学方法和教育工具,提供个性化、互动性强的学习体验,促进学生的综合素质提升。
这种融合需要教育科技人才具备教育专业知识和科技技术知识的双重素养。
2. 创新意识和能力的培养:教育科技人才应该具备创新意识和能力,能够在教育科技领域中不断创新,推动教育进步和颠覆。
他们需要具备独立思考和解决问题的能力,能够发现教育问题和痛点,并通过科技手段提出创新性的解决方案。
创新意识和能力的培养需要在教育中注重培养学生的探究精神、批判思维和实践能力,同时提供各种科技工具和平台,提供实践和创新的机会。
3. 协同机制的建立:教育科技人才的培养需要建立协同机制,促进教育和科技的协同发展。
一方面,教育机构和科技企业应该加强合作,共同研发适用于教育领域的科技产品和平台,推动科技创新应用于教育实践。
另一方面,教育科技人才的培养需要教育和科技专业的教师共同参与,建立跨学科的培养机制,形成合力,促进教育科技人才的培养。
协同机制的建立还需要建立教育科技人才的培养体系和评价体系。
培养体系应该通过课程设置和实践教学,注重培养学生的实际操作能力和创新能力,并提供实践和创新的机会。
评价体系应该能够科学评价教育科技人才的综合素质和能力,注重能力的培养和发展,而不仅仅是对知识的考核。
在当前的教育科技发展中,教育科技人才“三位一体”的培养迫在眉睫。
只有通过培养具备教育、科技和创新的综合素质的人才,才能更好地推动教育科技的发展,实现教育变革和创新。
构建三位一体课程体系推动科学思维发展
构建三位一体课程体系推动科学思维发展
随着世界知识经济的迅速发展,科学技术的进步对人类社会的发展起到了越来越重要
的作用,因此,培养具有科学思维的人才成为当今社会中的重要任务之一。
科学思维是指
在应对问题和解决问题时所运用的科学方法和逻辑思维方式,包括观察、实验、归纳与演绎、推理等基本思维。
为了推动科学思维的发展,我们可以构建三位一体课程体系。
三位一体课程体系包括科学、数学和计算机三个方面的课程,其目的是培养学生具有
科学思维和计算思维的能力。
首先,科学课程作为三位一体课程体系中的重要组成部分,可以让学生接触到科学领
域中的基本知识和实践,掌握科学思维的方法和技巧。
科学课程一方面可以促进学生对自
然科学的理解和理解,另一方面也可以推动学生对科学研究的探究和创新。
在科学课程中,教师可以引导学生进行实验和观察,以培养学生的观察力和探究精神,同时也可以通过科
学研究的过程教授学生如何归纳和演绎,以此加强科学思维的训练。
综上所述,三位一体课程体系能够为学生提供一个全面、系统、连续的学习机会,有
助于培养学生的科学思维和计算思维能力。
通过科学、数学和计算机三个方面的课程学习,学生可以增强逻辑思维、推理能力和观察力,进而能够更好地应对各种问题和挑战。
因此,在教育中推广三位一体课程体系,培养健全的个性,这是未来社会建设和科技发展的关键
所在。
智慧护理助力“三位一体”的智慧医院建设的探索

智慧护理助力“三位一体”的智慧医院建设的探索
于芳;韩晓涛;王晓莹;徐鹏
【期刊名称】《智慧健康》
【年(卷),期】2024(10)7
【摘要】早期的护士工作站起源于医院管理信息系统,作为系统的子模块而存在。
随着医院信息化的不断发展,护理系统的应用范围越来越广,包括医嘱处理、护理记录、床位管理、执行单生成、护理质量和护理排班等。
本文以我院新建院区“三位一体”的智慧医院信息化建设为出发点,明确智慧护理建设的重要性,通过规范化护理语言和护理系统的决策支持,旨在推进临床护理作业的专业化和智能化,实现医疗信息资源的共享。
通过全新的护理模式推动智慧医院的建设,开启智慧护理管理的新篇章!
【总页数】5页(P9-13)
【作者】于芳;韩晓涛;王晓莹;徐鹏
【作者单位】航空总医院;东华医为科技有限公司
【正文语种】中文
【中图分类】R47
【相关文献】
1.智慧党建助力基层党组织建设——拉萨市经济和信息化局“智慧党建”探索与实践
2.智慧金融在“三位一体”智慧医院建设中的应用探讨
3.智慧医院建设背景下
公立医院智慧财务建设实践探索4.建设“崇真”智慧校园助力乡村教育发展--江苏省板浦高级中学智慧校园建设的实践探索
因版权原因,仅展示原文概要,查看原文内容请购买。
三位一体 四链融合 多方联动——杭州市萧山区探索构建科教融合人才培养新格局

三位一体四链融合多方联动——杭州市萧山区探索构建科教
融合人才培养新格局
陈心妍
【期刊名称】《今日科技》
【年(卷),期】2024()1
【摘要】2024年,本刊推出“创新深化”试点栏目,以“机制+实例”方式探索实践教育科技人才一体化推进浙江路径,推动形成“一地创新、全省共享”“浙江创新、全国共享”的良好生态。
【总页数】2页(P60-61)
【作者】陈心妍
【作者单位】不详
【正文语种】中文
【中图分类】G64
【相关文献】
1."四联动、四融合、三个一体"高职院校老年护理人才培养模式实践探索
2.连锁专业“产教融合、四链联动”人才培养模式实证研究
3.三融合三对接四联动——农职院校现代农机人才培养模式的探索与实践
4.科教深度融合背景下多方联动协同育人研究生导师团队构建研究
5.产教融合背景下服装专业“三位一体”与“四步进阶”的人才培养创新探索
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第18卷第1期1999年2月电 子 显 微 学 报Journal of Chinese Electron Microscopy Society Vol -18,No .11999-02文章编号:1000-6281(1999)01-0141-144三维一体化超微定位系统的研制胡小唐 禹国强 刘安伟 杨 勇(天津大学精密测试技术及仪器国家重点实验室,天津300072)摘 要:本文设计并研制了以柔性铰链为弹性导轨、压电陶瓷为驱动器的三维一体化超微定位机构,并以激光干涉仪微位移检测装置和微机控制系统构成了数字闭环控制的三维一体化超微定位系统。
关键词:柔性铰链;压电陶瓷;激光干涉仪;三维一体化超微定位台分类号:T H 744.3;T M 282.7;T H 703.65 文献标识码:A 基金项目:国家自然科学基金资助项目(No.59675082);微米/纳米技术国际预研—微机理研究专项青年基金资助项目(No .96002)科学技术的发展在诸多领域迫切需要超微定位技术,尤其是在纳米科学和技术领域,纳米加工、测量与三维超微定位技术更是密不可分。
目前国内外研制的超微定位机构还只是一维、二维及拼接式三维超微定位机构,还没有在整块材料上直接加工出三维运动机构的三维一体化超微定位机构。
虽然拼接式结构和一体化结构相比加工简单,但安装复杂,安装精度要求高,安装时三运动方向上存在的垂直度误差将产生交叉耦合误差。
其存在抗干扰能力差、对外界温度、振动较敏感、运动方向上的刚度易变化、长期稳定性差等缺陷,并且由于粘接、紧固件的连接,在纳米级尺寸必然存在爬行、蠕动等致命弱点。
而三维一体化超微定位机构以其一体化和整体性结构的独特优势,可以避免拼接式结构的这些缺陷和弱点。
因此发展三维一体化的超微定位机构有很大的使用价值和广泛的应用前景。
超微定位系统的构成超微定位系统由微定位机构(微定位工作台)、微位移检测装置和控制系统构成,如图1。
图1 超微定位系统构成 F ig .1 Block diag ram o f ultr a -m icro po sitio ning sy st em1.微定位机构微定位机构是指行程一般小于毫米级,灵敏度和精度优于亚纳米、纳米级的机构,通常由微位移器和导轨两部分组成。
根据导轨形式和位移驱动方式可分成以下五类:(1)柔性铰链为弹性导轨—压电、电致伸缩位移器构成的微定位机构;(2)滚动导轨—机械式或压电、电致伸缩位移器构成的微定位机构;(3)弹性导轨—机械式或电磁及压电、电致伸缩位移器构成的微定位机构;(4)气浮导轨—伺服电机或直线电机驱动器构成的微定位机构;(5)滑动导轨—机械式位移器构成的微定位机构;导轨形式的选择对微定位机构的定位精度和位移分辨率有重要的影响,在不考虑微位移器的误差的前提下,微位移定位机构的定位误差范围的大小为:$=3F S +F d K (1) 其中,F S 为系统摩擦表面的静摩擦力,F d 为系统摩擦表面的动摩擦力,K 为传动系统的刚度。
由式(1)可知,微位移定位系统的定位精度取决于系统摩擦力的绝对值和系统的刚度,减小摩擦力的绝对值和提高系统的刚度是提高定位精度的重要措施。
柔性铰链是一种新型的弹性导轨形式,具有无机械摩擦、无间隙、无热源、加工简单及运动灵敏性高等优点,是理想的导轨形式。
机械式微位移驱动器存在较大的机械间隙及机械摩擦,电热式、电磁式微位移驱动器具有发热现象,可导致相邻零件产生热变形,微位移精度难以达到纳米量级。
压电、电致伸缩微位移驱动器结构紧凑、体积小、位移分辨率高、不产生噪音和发热、易于控制、刚度大,是较理想的微位移驱动器件。
因此,本文研制的三维一体化超微定位工作台采用柔性铰链为弹性导轨,压电陶瓷微位移器为驱动器。
2.微位移检测装置及控制系统微位移检测装置应具有高分辨率、高精度和一定的测量范围。
激光干涉仪以其测量范围大、高位移分辨率和精度、非接触等优点被广泛使用。
微位移定位机构的伺服控制系统普遍采用计算机控制系统,除控制定位精度外还配有速度、加速度控制,并对系统误差进行监测和修正,使微位移定位机构达到高的动态和静态精度。
三维一体化超微定位工作台1.结构设计图2为三维一体化工作台的机械结构简图。
该工作台是用线切割机床在整块金属材料上切割而成,两组柔性平行弹性导轨分别组成X 向、Y 向的运动机构。
工作台内有由柔性铰链连接的柔性八杆对称联动结构作为Z 向的运动机械。
Z 向运动对X 、Y 向没有影响,只使工作台沿Z 向运动;Y 向运动体的运动可带动X 向运动体和工作台实现Y 向运动;X 向运动体的运动可带动工作台实现X 向运动,对Y 向运动体没有影响。
因此,工作台在X 、Y 、Z 向压电陶瓷驱动器的驱动下,可完成三维扫描运动。
该机构是复合柔性四杆机构,它消除了四杆机构在运动方向的垂直方向上的寄生运动,对载重物重量变化及Z 向的作用力不敏感。
多个柔性铰链起到平均效应作用,从而使加工引起的误图2 三维一体化定位台机械结构原理示意图Fig.2 3D monolit hic ultr a-micr opo sitio ning mechanism142 电 子 显 微 学 报第18卷差得到一定程度的抵消。
平行四杆机构保证了良好的导向性,机构在运动方向上三个转角误差很 图3 超微定位工作台简化模型 F ig.3 K inetic m odel o f ultr a-micro po sitio ning mechanism 小。
双平行复合四杆机构使得这三个误差因素影响进一步降低。
在加工过程中应保证整个机构严格的中心对称,使加工误差因素向四周扩散,以减少累计误差效应,并且使机构受环境变化引起的误差尽可能小。
2.动力学模型超微定位工作台可简化为图3所示的等效模型,K t为传动部件刚度,K 为弹性导轨刚度,m 为定位机构的运动质量,L 为阻尼系数。
当输入位移为x (t )时,输出位移为y (t ),系统动力学方程为:m y ¨+L y õ+(k +k t )y =k t x (t )(2) 此系统在阶跃微位移输入x (t )条件下的输出y (t )为:y (t )=k t k +k tx (t )1-e -N X n t 1-N 2sin X d t +arctg 1-N 2N (3)式中:X d =X n1-N 2为系统阻尼自然角频率;X n =k +k t m 为系统无阻尼自然角频率;N =L 2m X n 为阻尼比。
系统达到稳态后,其输出位移为:y =k t k t +k x(4)由式(4)可以看出,k 和k t 均为系统的固有参数,因此系统的稳态位移输出由输入位移的变化唯一确定,不受初始条件和其他因素的影响,故超微定位工作台可以获得稳定的高位移分辨率和运动精度。
此系统动态瞬时响应上升时间:t r =P X n 1-N2(5)由式(3)、式(5)可知,系统的瞬态阶跃响应是以阻尼自然角频率X d 的衰减振荡,工作台微位移达到稳态的时间与系统的无阻尼自然角频率X n 成反比,即X n 的值越大,工作台的瞬态响应速度越快,因此在设计超微定位工作台时,应尽可能提高系统的固有频率。
三维一体化超微定位系统在理想条件下,压电陶瓷驱动器的应变与外电场强度成线性,但实际上,压电陶瓷驱动器存在迟滞、非线性、蠕变等特性,其应变与外电场强度曲线并不是理想的线性曲线。
压电陶瓷驱动器固有的压电误差直接影响定位工作台的最终定位精度。
为实时补偿压电误差,使定位工作台准确、平稳地到达预定的位置,本文建立了如图4所示的闭环控制系统。
该系统由计算机、D /A 转换器、高压放大电路、压电陶瓷驱动器、三维一体化超微定位工作台、用于微位移检测的激光干涉仪和A /D 数据采集电路组成。
由计算机预先设定工作位置,其输出的数字信号经D/A 转换器、直流电压放大电路控制压电陶瓷驱动器驱动定位工作台。
用于微位移检测的激光干涉仪实时检测工作台的位置,并通过A/D 转换器将位置信号送入计算机与预定位置进行比较,由计算机根据偏差输出控制信号,从而实现无偏差的精密定位。
图5是用于微位移检测的激光干涉仪的原理图,干涉仪采用迈克耳逊干涉光路,光源使用143第1期胡小唐等:三维一体化超微定位系统的研制 He -Ne 激光器,稳频输出波长为632.8nm 的激光。
其中1-动镜(固定于定位工作台上);2-分束器;3-固定镜;4-反射镜;5、6-光纤接口;7-光路密封外壳。
该激光干涉仪光路系统简单、成本低,而且由于采用干涉条纹细分技术,精度可达纳米、亚纳米。
移动镜采用平面反射镜可以在较大的范围内实现反射功能,避免了当另外的两个方向上产生较大位移时,光束移出反射镜的情况。
另外采用光纤将干涉仪与半导体激光器及光电传感器分离,避免了由于激光器和传感器的热效应引起的温度场对干涉仪的测量影响。
图中两个光纤接口,上面的是激光输入接口,光束来自激光器;下面的是光束输出接口,通过光纤将干涉信号传输到光电传感器。
图4 三维一体化超微定位系统F ig .4 3D m onolithic ultr a -micr oposit ioning system 图5 激光干涉仪的基本光路F ig .5 Schem atic diagr am o f laser inter fero meter微定位系统性能指标三维一体化超微定位系统的误差源主要有机械结构加工误差、微位移检测传感器误差、量化误差、环境温度变化和振动引起的误差等几部分。
由于各误差定量计算比较困难,本文通过对整个超微定位系统进行标定来确定系统的定位精度。
系统在全行程上X 、Y 、Z 定位精度优于±0.01L m ;定位台行程大于10L m ;定位分辨率为3nm ;最大定位时间是40ms 。
参 考 文 献[1]P aro s J M et al .M achine Desig n ,N o .25,1965.[2]Bobr off N or man.M eas.Sci.T echno l.,1993,4∶907—926.[3]L u B Y et al.SP IE.Vo l.2358,1994.[4]庄在龙.3D 超精定位技术及其系统的研究:[学位论文].1995.A study on 3D monolithicultra -micropositioning systemH U Xiao-tang YU Guo -qiang LIU An-w ei YANG Yong(State K ey L abor ato ry of P recisio n M easuring T echnolog y &Instr ument ,T ianjin U niv ersit y,T ianjin 300072,China.)Abstract :T he 3D mo nolithic ult ra-micro positioning mechanism on the basis of flexur e hing e and piezoelctric acturat or is studied in this ar ticle,fur thermo re ,the dig ita l closed-loo p co nt ro l sy stem com bined w ith laser inter fero meter and computer co ntro l sy st em is dev elo ped .Keywords :flex ure hing e;P ZT ;laser inter fero meter ;3D mono lithic ultr a-micro po sitio ning mechanism.144 电 子 显 微 学 报第18卷。